
Adaptive PI Controller for Speed Control of Electric Drives Based on Model Reference Adaptive Identification



Abstract
1. Introduction
2. Conventional PI Controller for Speed Control
2.1. Mathematical Model of the Speed Control System
2.2. Design of the Conventional PI Controller
2.3. Dynamic Performance of the Speed PI Control System
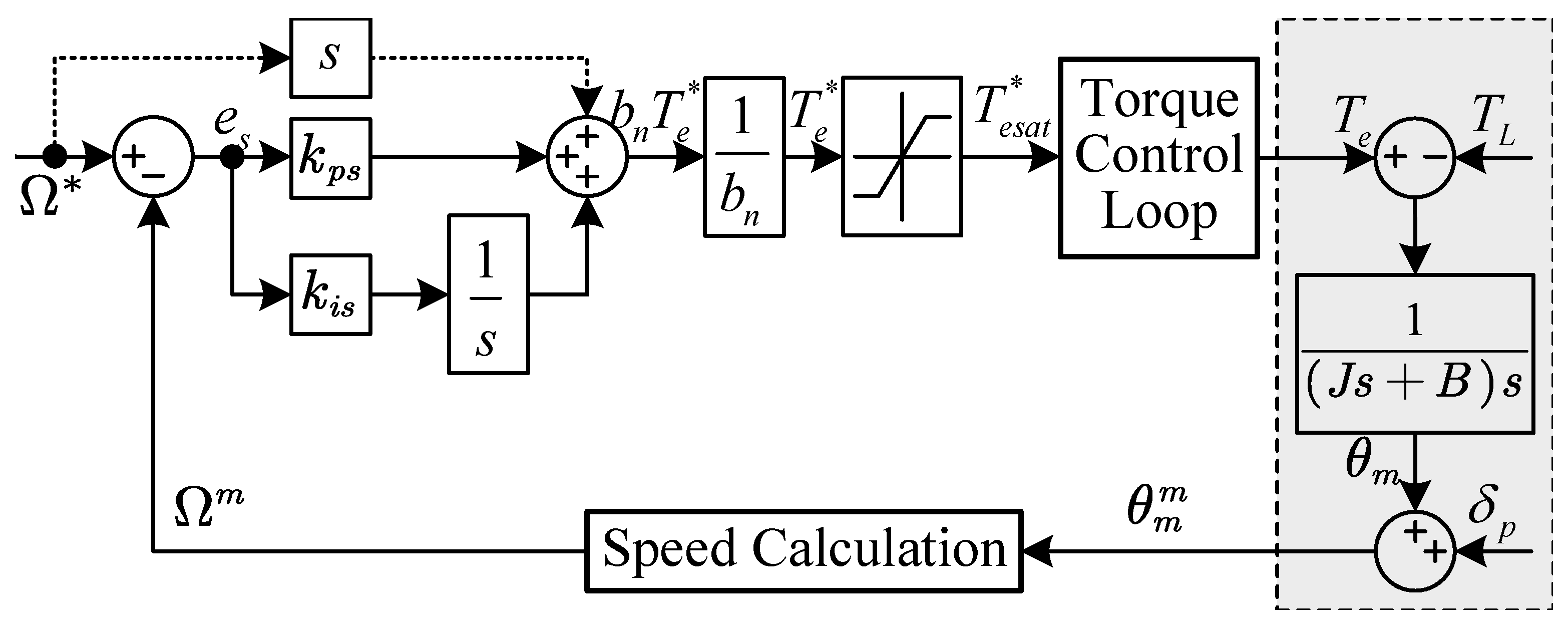
3. Adaptive PI Controller for Speed Control Based on MRAI
3.1. Adaptive PI Controller Considering Mechanical Parameters Uncertainties
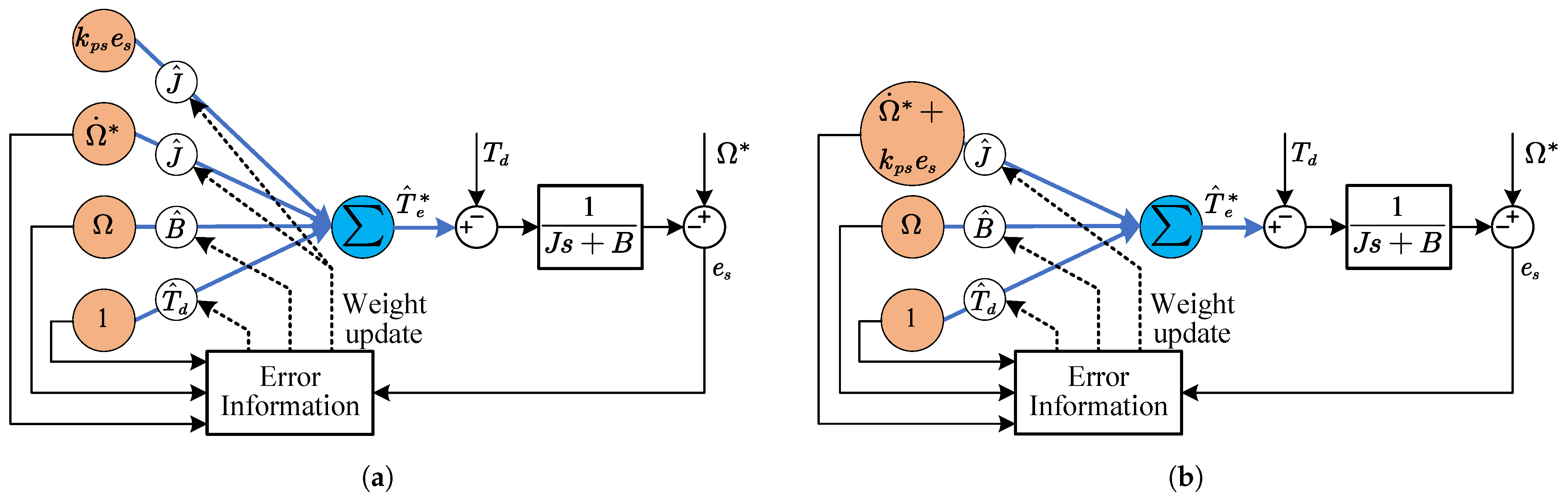
3.2. Interpretation of Adaptive PI Controller Using ADALINE
3.3. Practical Issues in Real Applications
4. Simulation Verification
4.1. System Setup
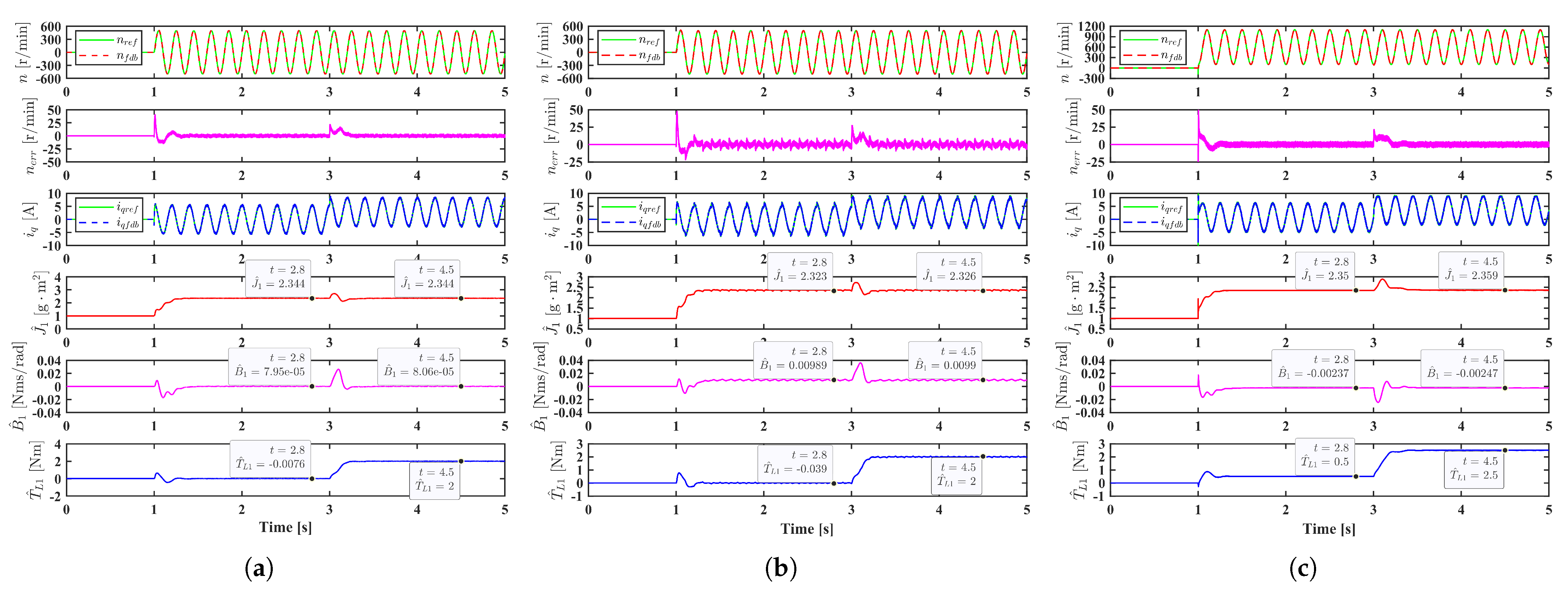
4.2. Simulation Verification of the Adaptive PI-1 Controller
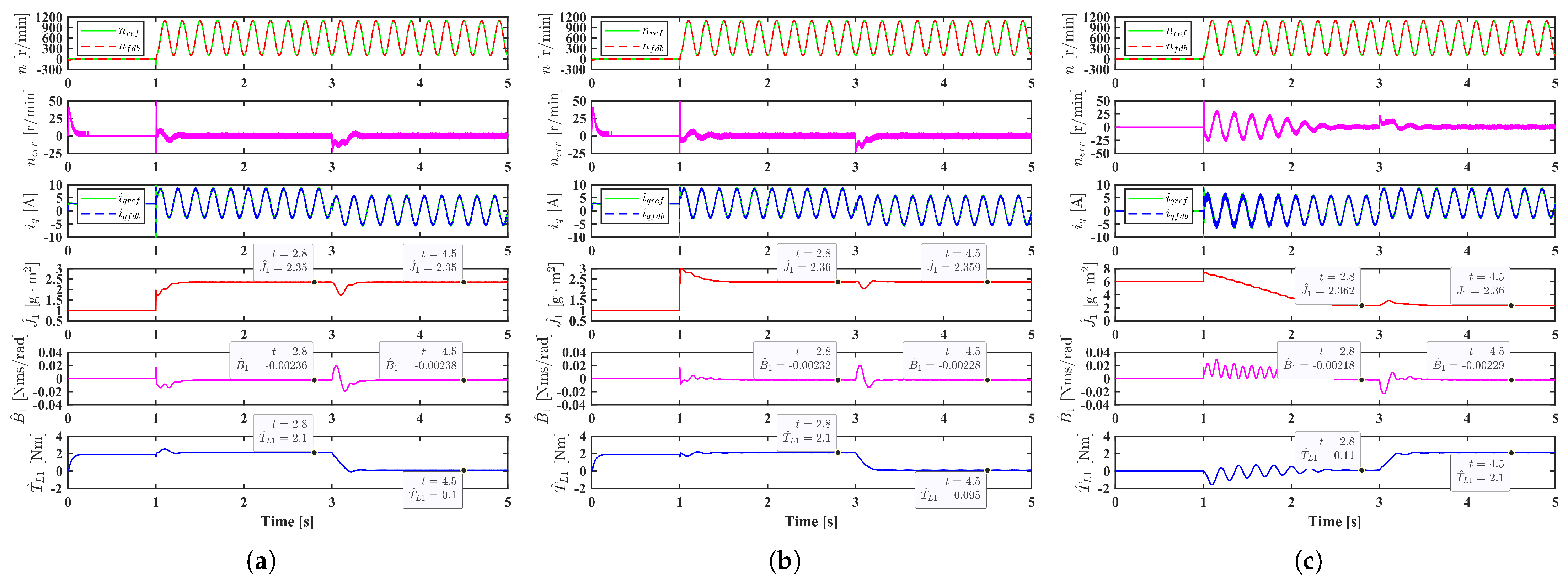
4.3. Comparison of the Adaptive PI-1 Controller and the Adaptive PI-2 Controller
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Yang, J.; Chen, W.H.; Li, S.; Guo, L.; Yan, Y. Disturbance/Uncertainty Estimation and Attenuation Techniques in PMSM Drives—A Survey. IEEE Trans. Ind. Electron. 2017, 64, 3273–3285. [Google Scholar] [CrossRef]
- Zuo, Y.; Chen, J.; Zhu, X.; Lee, C.H.T. Different Active Disturbance Rejection Controllers Based on the Same Order GPI Observer. IEEE Trans. Ind. Electron. 2022, 69, 10969–10983. [Google Scholar] [CrossRef]
- Harnefors, L.; Saarakkala, S.E.; Hinkkanen, M. Speed Control of Electrical Drives Using Classical Control Methods. IEEE Trans. Ind. Appl. 2013, 49, 889–898. [Google Scholar] [CrossRef]
- Chen, W.H.; Yang, J.; Guo, L.; Li, S. Disturbance-Observer-Based Control and Related Methods—An Overview. IEEE Trans. Ind. Electron. 2015, 63, 1083–1095. [Google Scholar] [CrossRef]
- Sariyildiz, E.; Oboe, R.; Ohnishi, K. Disturbance Observer-Based Robust Control and Its Applications: 35th Anniversary Overview. IEEE Trans. Ind. Electron. 2020, 67, 2042–2053. [Google Scholar] [CrossRef]
- Gao, Z. On the Centrality of Disturbance Rejection in Automatic Control. ISA Trans. 2014, 53, 850–857. [Google Scholar] [CrossRef] [PubMed]
- Liu, C.; Luo, G.; Duan, X.; Chen, Z.; Zhang, Z.; Qiu, C. Adaptive LADRC-based disturbance rejection method for electromechanical servo system. IEEE Trans. Ind. Appl. 2019, 56, 876–889. [Google Scholar] [CrossRef]
- Zhu, L.; Zhang, G.; Jing, R.; Bi, G.; Xiang, R.; Wang, G.; Xu, D. Nonlinear active disturbance rejection control strategy for permanent magnet synchronous motor drives. IEEE Trans. Energy Convers. 2022, 37, 2119–2129. [Google Scholar] [CrossRef]
- Sira-Ramírez, H.; Luviano-Juárez, A.; Ramírez-Neria, M.; Zurita-Bustamante, E.W. Active Disturbance Rejection Control of Dynamic Systems: A Flatness Based Approach; Butterworth-Heinemann: Oxford, UK, 2018. [Google Scholar]
- Zuo, Y.; Mei, J.; Jiang, C.; Yuan, X.; Xie, S.; Lee, C.H.T. Linear Active Disturbance Rejection Controllers for PMSM Speed Regulation System Considering the Speed Filter. IEEE Trans. Power Electron. 2021, 36, 14579–14592. [Google Scholar] [CrossRef]
- akomy, K.; Madonski, R. Cascade extended state observer for active disturbance rejection control applications under measurement noise. ISA Trans. 2021, 109, 1–10. [Google Scholar]
- Ahmad, S.; Ali, A. On active disturbance rejection control in presence of measurement noise. IEEE Trans. Ind. Electron. 2021, 69, 11600–11610. [Google Scholar] [CrossRef]
- Huang, Y.; Xue, W. Active Disturbance Rejection Control: Methodology and Theoretical Analysis. ISA Trans. 2014, 53, 963–976. [Google Scholar] [CrossRef]
- Feng, H.; Guo, B.Z. Active disturbance rejection control: Old and new results. Annu. Rev. Control 2017, 44, 238–248. [Google Scholar] [CrossRef]
- Xue, W.; Huang, Y. Comparison of the DOB Based Control, a Special Kind of PID Control and ADRC. In Proceedings of the 2011 American Control Conference, San Francisco, CA, USA, 29 June–1 July 2011; pp. 4373–4379. [Google Scholar]
- Zhong, S.; Huang, Y.; Guo, L. A Parameter Formula Connecting PID and ADRC. Sci. China Inf. Sci. 2020, 63, 192203. [Google Scholar] [CrossRef]
- Lin, P.; Wu, Z.; Fei, Z.; Sun, X.M. A Generalized PID Interpretation for High-Order LADRC and Cascade LADRC for Servo Systems. IEEE Trans. Ind. Electron. 2022, 69, 5207–5214. [Google Scholar] [CrossRef]
- Jung, J.W.; Leu, V.Q.; Do, T.D.; Kim, E.K.; Choi, H.H. Adaptive PID speed control design for permanent magnet synchronous motor drives. IEEE Trans. Power Electron. 2014, 30, 900–908. [Google Scholar] [CrossRef]
- Wang, Y.; Fang, S.; Hu, J. Active disturbance rejection control based on deep reinforcement learning of PMSM for more electric aircraft. IEEE Trans. Power Electron. 2022, 38, 406–416. [Google Scholar] [CrossRef]
- Kim, S.K.; Lee, K.G.; Lee, K.B. Singularity-free adaptive speed tracking control for uncertain permanent magnet synchronous motor. IEEE Trans. Power Electron. 2015, 31, 1692–1701. [Google Scholar] [CrossRef]
- Guo, L.; Parsa, L. Model reference adaptive control of five-phase IPM motors based on neural network. IEEE Trans. Ind. Electron. 2011, 59, 1500–1508. [Google Scholar] [CrossRef]
- Nguyen, A.T.; Rafaq, M.S.; Choi, H.H.; Jung, J.W. A model reference adaptive control based speed controller for a surface-mounted permanent magnet synchronous motor drive. IEEE Trans. Ind. Electron. 2018, 65, 9399–9409. [Google Scholar] [CrossRef]
- Zuo, Y.; Mei, J.; Zhang, X.; Lee, C.H.T. Simultaneous Identification of Multiple Mechanical Parameters in a Servo Drive System Using Only One Speed. IEEE Trans. Power Electron. 2021, 36, 716–726. [Google Scholar] [CrossRef]
- Zuo, Y.; Xie, S.; Cao, L.; Han, B.S.; Hoang, C.C.; You, C.; Chan, J.; Lee, C.H.T. A Novel Nonlinear Active Disturbance Rejection Controller for Speed Control of Electric Drives. In Proceedings of the 2022 IEEE Energy Conversion Congress and Exposition (ECCE), Detroit, MI, USA, 9–13 October 2022; pp. 1–5. [Google Scholar]
- Zhang, W. System identification based on a generalized ADALINE neural network. In Proceedings of the 2007 American Control Conference. IEEE, New York, NY, USA, 9–13 July 2007; pp. 4792–4797. [Google Scholar]
- Osorio-Arteaga, F.; Giraldo, E. Adaptive Neural Network Identification for Robust Multivariable Systems. IAENG Int. J. Appl. Math. 2024, 54, 68–76. [Google Scholar]
- Levine, W.S. The Control Handbook (Three Volume Set); CRC Press: Boca Raton, FL, USA, 2018. [Google Scholar]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbol | Quantity | Symbol | Quantity |
|---|---|---|---|
| Rated power | 1.0 (kW) | polePair numbers | 4 |
| Rated voltage | 220 (V) | D axis inductance | 3.4 (mH) |
| Rated speed | 2500 (r/min) | Q axis inductance | 3.4 (mH) |
| Rated torque | 4.0 (Nm) | Torque constant | 0.71 (Nm/A) |
| Current limit | 9 (A) | Coulomb friction torque | 0.1 (Nm) |
| Stator resistance | 1.18 (Ohm) | Motor system inertia J | 2.35 () |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zuo, Y.; Zhu, S.; Cui, Y.; Liu, C.; Lin, X. Adaptive PI Controller for Speed Control of Electric Drives Based on Model Reference Adaptive Identification. Electronics 2024, 13, 1067. https://doi.org/10.3390/electronics13061067
Zuo Y, Zhu S, Cui Y, Liu C, Lin X. Adaptive PI Controller for Speed Control of Electric Drives Based on Model Reference Adaptive Identification. Electronics. 2024; 13(6):1067. https://doi.org/10.3390/electronics13061067
Chicago/Turabian StyleZuo, Yuefei, Shushu Zhu, Yebing Cui, Chuang Liu, and Xiaogang Lin. 2024. "Adaptive PI Controller for Speed Control of Electric Drives Based on Model Reference Adaptive Identification" Electronics 13, no. 6: 1067. https://doi.org/10.3390/electronics13061067
APA StyleZuo, Y., Zhu, S., Cui, Y., Liu, C., & Lin, X. (2024). Adaptive PI Controller for Speed Control of Electric Drives Based on Model Reference Adaptive Identification. Electronics, 13(6), 1067. https://doi.org/10.3390/electronics13061067