

Adaptive Dynamic Programming-Based Spacecraft Attitude Control Under a Tube-Based Framework


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
- (1)
- A tube-based framework that includes a nominal system and an error system is constructed for spacecraft attitude control, allowing for “two degrees of freedom” for controller design. Moreover, with the generated nominal trajectory and a small error set, the knowledge of the actual states can be determined prior to control being applied.
- (2)
- The adaptive dynamic programming technique is adopted for the design of nominal control law, aiming to optimize the control performance and minimize energy costs while ensuring the convergence of the nominal system.
- (3)
- The nonsingular terminal sliding mode control scheme is used to derive the error control law, which serves to suppress external disturbances and lead the actual system to track the nominal system.
2. Problem Formulation and Preliminaries
2.1. Error Attitude Dynamical Model of Rigid Spacecraft
2.2. Tube-Based Control Framework
3. Main Results
3.1. ADP-Based Control Law for Nominal System
3.2. Sliding Mode Control Law for Error System
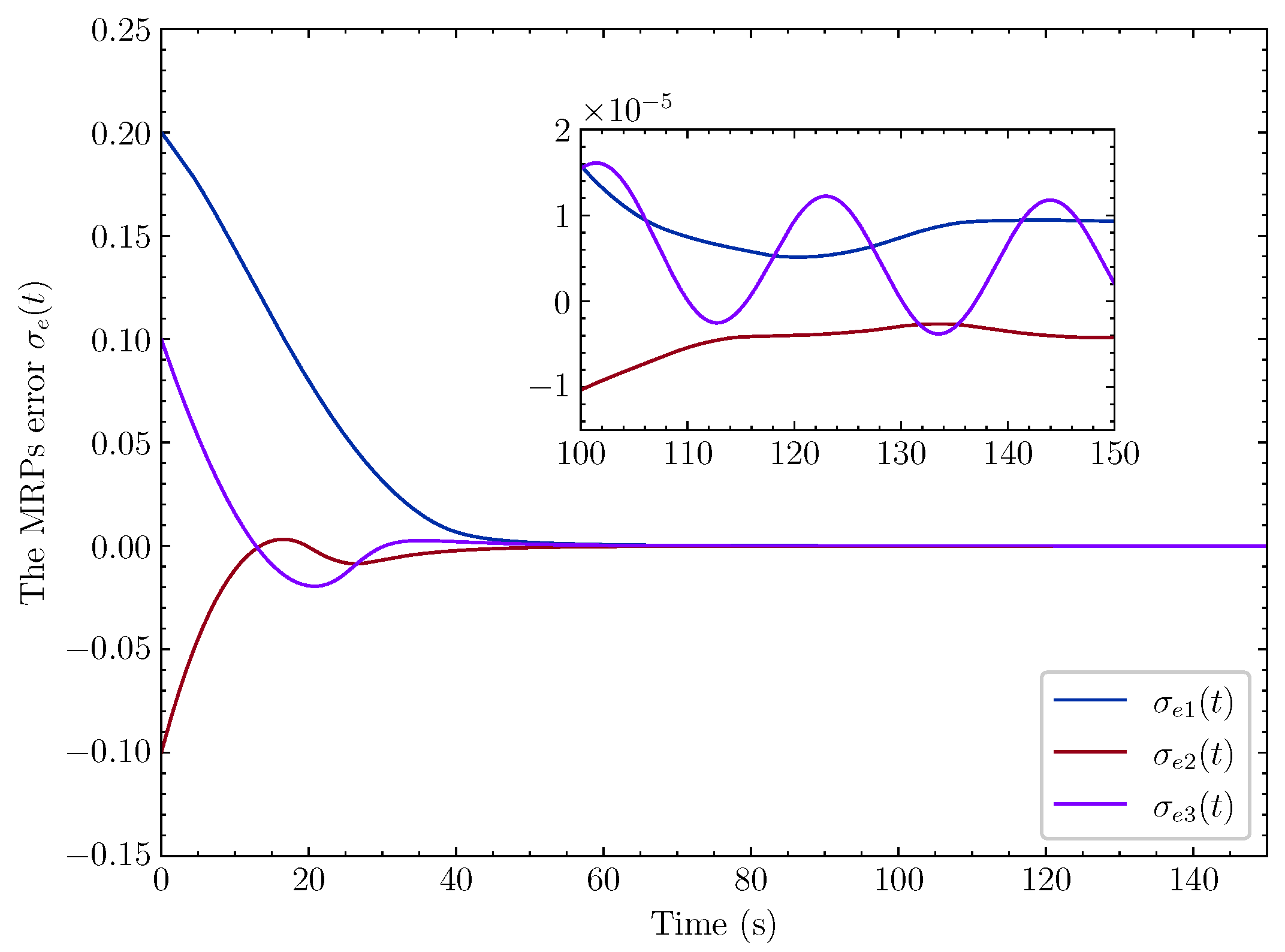
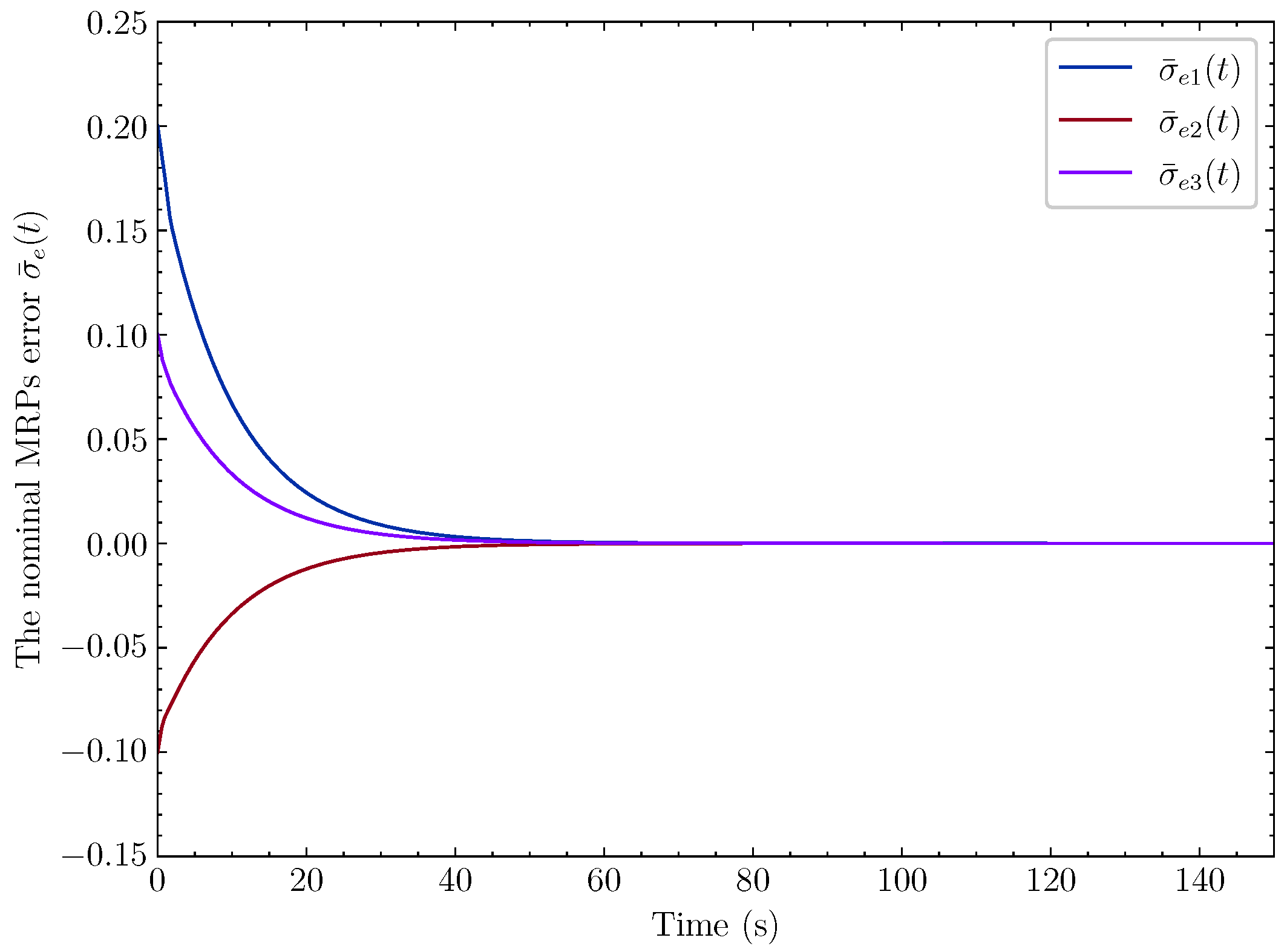
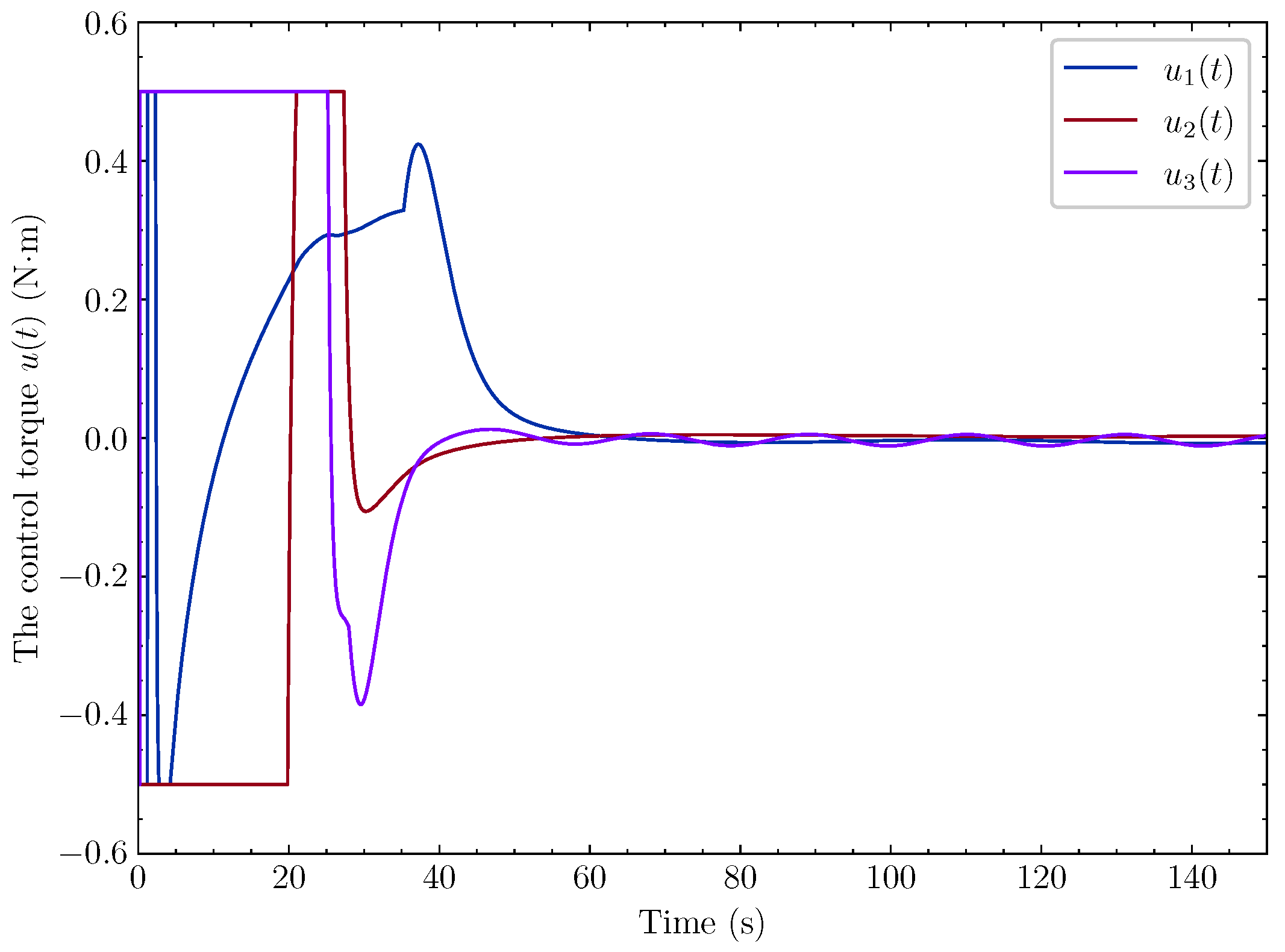
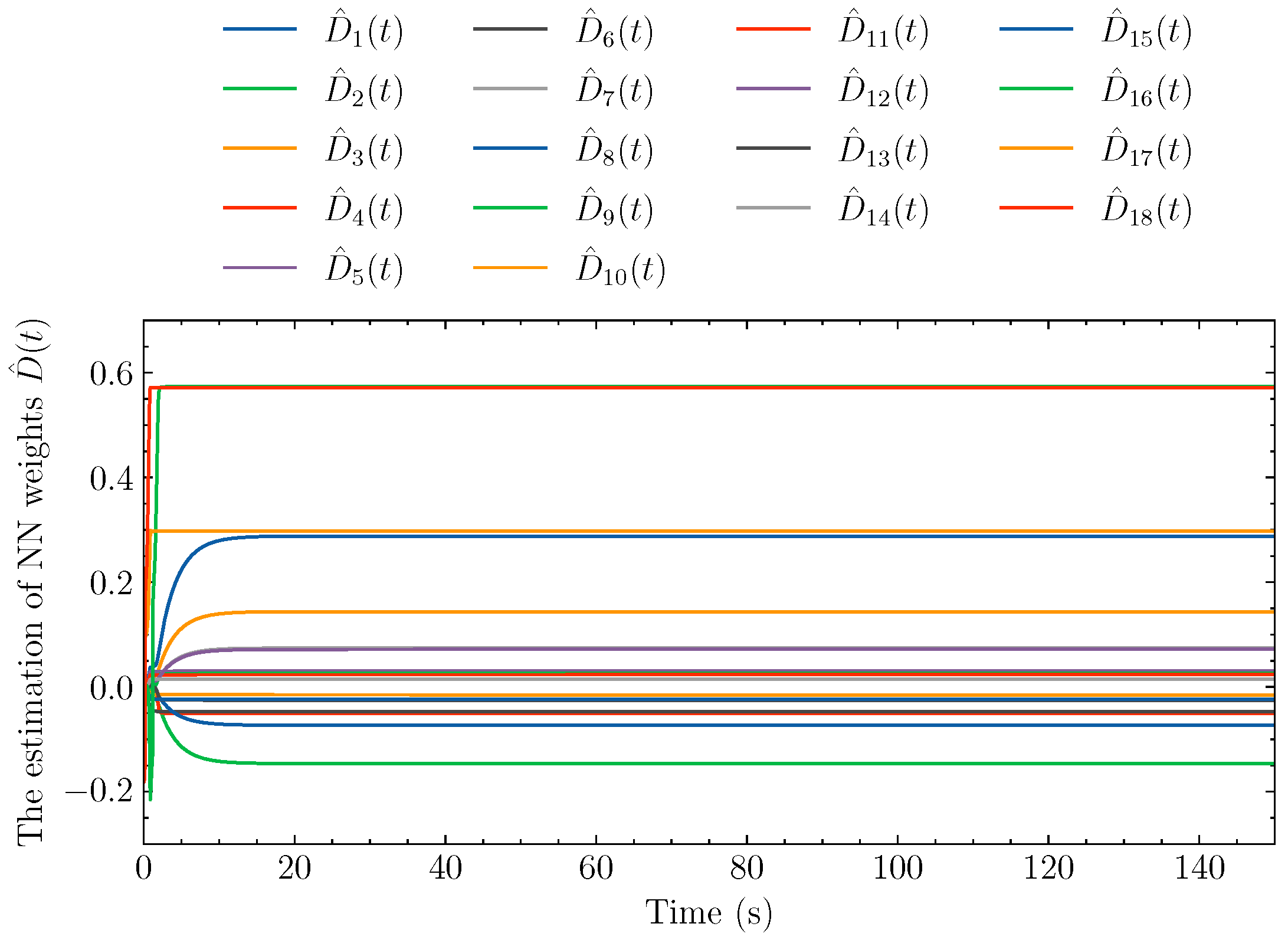
4. Simulation Results
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Li, L.; Zhou, X.; Hu, Z.; Gao, L.; Li, X.; Ni, X.; Chen, F. On-orbit monitoring flying aircraft day and night based on SDGSAT-1 thermal infrared dataset. Remote Sens. Environ. 2023, 298, 113840. [Google Scholar] [CrossRef]
- Jiao, B.; Sun, Q.; Han, H.; Dang, Z. A parametric design method of nanosatellite close-range formation for on-orbit target inspection. Chin. J. Aeronaut. 2023, 36, 194–209. [Google Scholar] [CrossRef]
- Xiao, Y.; de Ruiter, A.; Ye, D.; Sun, Z. Attitude Coordination Control for Flexible Spacecraft Formation Flying with Guaranteed Performance Bounds. IEEE Trans. Aerosp. Electron. Syst. 2023, 59, 1534–1550. [Google Scholar] [CrossRef]
- Chen, Z.; Chen, Q.; He, X.; Sun, M. Adaptive Backstepping Control Design for Uncertain Rigid Spacecraft with Both Input and Output Constraints. IEEE Access 2018, 6, 60776–60789. [Google Scholar] [CrossRef]
- Wang, Y.; Tang, S.; Guo, J.; Wang, X.; Liu, C. Fuzzy-Logic-Based Fixed-Time Geometric Backstepping Control on SO(3) For Spacecraft Attitude Tracking. IEEE Trans. Aerosp. Electron. Syst. 2019, 55, 2938–2950. [Google Scholar] [CrossRef]
- Wang, Y.; Ji, H. Integrated relative position and attitude control for spacecraft rendezvous with ISS and finite-time convergence. Aerosp. Sci. Technol. 2019, 85, 234–245. [Google Scholar] [CrossRef]
- Hou, Z.; Lan, X. Adaptive sliding mode and RBF neural network based fault tolerant attitude control for spacecraft with unknown uncertainties and disturbances. Adv. Space Res. 2024, 74, 1680–1692. [Google Scholar] [CrossRef]
- Gao, J.; Fu, Z.; Zhang, S. Adaptive Fixed-Time Attitude Tracking Control for Rigid Spacecraft with Actuator Faults. IEEE Trans. Ind. Electron. 2019, 66, 7141–7149. [Google Scholar] [CrossRef]
- Kang, Z.; Shen, Q.; Wu, S.; Damaren, C.J. Saturated adaptive pose tracking control of spacecraft on SE(3) under attitude constraints and obstacle-avoidance constraints. Automatica 2024, 159, 111367. [Google Scholar] [CrossRef]
- Liu, Q.Z.; Zhang, L.; Sun, B.; Xiao, Y.; Fan, G.W. Fixed-Time Disturbance Observer-Based Attitude Prescribed Performance Predictive Control for Flexible Spacecraft. IEEE Trans. Aerosp. Electron. Syst. 2024, 60, 3209–3220. [Google Scholar] [CrossRef]
- Xuan-Mung, N.; Golestani, M. Energy-Efficient Disturbance Observer-Based Attitude Tracking Control with Fixed-Time Convergence for Spacecraft. IEEE Trans. Aerosp. Electron. Syst. 2023, 59, 3659–3668. [Google Scholar] [CrossRef]
- Marshall, M.A.; Goel, A.; Pellegrino, S.R.M. Power-Optimal Guidance for Planar Space Solar Power Satellites. J. Guid. Control Dyn. 2020, 43, 518–535. [Google Scholar] [CrossRef]
- Li, Q.; Gao, D.; Sun, C.; Song, S.; Niu, Z.; Yang, Y. Prescribed performance-based robust inverse optimal control for spacecraft proximity operations with safety concern. Aerosp. Sci. Technol. 2023, 136, 108229. [Google Scholar] [CrossRef]
- Wang, P.; Zhang, X. Optimized Bézier-curve-based command generation and robust inverse optimal control for attitude tracking of spacecraft. Aerosp. Sci. Technol. 2022, 121, 107183. [Google Scholar] [CrossRef]
- Luo, W.; Chu, Y.C.; Ling, K.V. H-infinity Inverse Optimal Attitude-Tracking Control of Rigid Spacecraft. J. Guid. Control Dyn. 2005, 28, 481–494. [Google Scholar] [CrossRef]
- Huang, Y.; Zhang, Z.; Yang, X. Backstepping based neural H-infinite optimal tracking control for nonlinear state constrained systems with input delay and disturbances. Neurocomputing 2024, 595, 127869. [Google Scholar] [CrossRef]
- Liu, Y.; Ma, G.; Lyu, Y.; Wang, P. Neural network-based reinforcement learning control for combined spacecraft attitude tracking maneuvers. Neurocomputing 2022, 484, 67–78. [Google Scholar] [CrossRef]
- Wang, R.; Zhuang, Z.; Tao, H.; Paszke, W.; Stojanovic, V. Q-learning based fault estimation and fault tolerant iterative learning control for MIMO systems. ISA Trans. 2023, 142, 123–135. [Google Scholar] [CrossRef]
- Dierks, T.; Jagannathan, S. Optimal control of affine nonlinear continuous-time systems. In Proceedings of the 2010 American Control Conference, Baltimore, MD, USA, 30 June–2 July 2010; pp. 1568–1573. [Google Scholar] [CrossRef]
- Yang, H.; Hu, Q.; Dong, H.; Zhao, X. ADP-Based Spacecraft Attitude Control Under Actuator Misalignment and Pointing Constraints. IEEE Trans. Ind. Electron. 2022, 69, 9342–9352. [Google Scholar] [CrossRef]
- Xiao, B.; Zhang, H.; Chen, Z.; Cao, L. Fixed-Time Fault-Tolerant Optimal Attitude Control of Spacecraft with Performance Constraint via Reinforcement Learning. IEEE Trans. Aerosp. Electron. Syst. 2023, 59, 7715–7724. [Google Scholar] [CrossRef]
- Yuan, L.; Wang, L.; Zhang, J. Adaptive dynamic programming base on MMC device of a flexible high-altitude long endurance aircraft. Aerosp. Sci. Technol. 2024, 151, 109305. [Google Scholar] [CrossRef]
- Wei, Q.; Yang, Z.; Su, H.; Wang, L. Online Adaptive Dynamic Programming for Optimal Self-Learning Control of VTOL Aircraft Systems with Disturbances. IEEE Trans. Autom. Sci. Eng. 2024, 21, 343–352. [Google Scholar] [CrossRef]
- Jing, C.; Xu, H.; Niu, X.; Song, X. Adaptive Nonsingular Terminal Sliding Mode Control for Attitude Tracking of Spacecraft with Actuator Faults. IEEE Access 2019, 7, 31485–31493. [Google Scholar] [CrossRef]
- Qiao, J.; Li, Z.; Xu, J.; Yu, X. Composite Nonsingular Terminal Sliding Mode Attitude Controller for Spacecraft with Actuator Dynamics Under Matched and Mismatched Disturbances. IEEE Trans. Ind. Inform. 2020, 16, 1153–1162. [Google Scholar] [CrossRef]
- Zhang, L.; Wang, H.; Zhu, Y.; Yang, J. Tube-based attitude control of rigid-bodies with magnitude-bounded disturbances. Automatica 2021, 133, 109845. [Google Scholar] [CrossRef]
- Arjun Ram, S.P.; Akella, M.R. Uniform Exponential Stability Result for the Rigid-Body Attitude Tracking Control Problem. J. Guid. Control Dyn. 2020, 43, 39–45. [Google Scholar] [CrossRef]
- Li, Q.; Yuan, J.; Zhang, B. Extended state observer based output control for spacecraft rendezvous and docking with actuator saturation. ISA Trans. 2019, 88, 37–49. [Google Scholar] [CrossRef]


Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, S.; Liu, K.; Liu, M. Adaptive Dynamic Programming-Based Spacecraft Attitude Control Under a Tube-Based Framework. Electronics 2024, 13, 4575. https://doi.org/10.3390/electronics13224575
Li S, Liu K, Liu M. Adaptive Dynamic Programming-Based Spacecraft Attitude Control Under a Tube-Based Framework. Electronics. 2024; 13(22):4575. https://doi.org/10.3390/electronics13224575
Chicago/Turabian StyleLi, Shiyi, Kerun Liu, and Ming Liu. 2024. "Adaptive Dynamic Programming-Based Spacecraft Attitude Control Under a Tube-Based Framework" Electronics 13, no. 22: 4575. https://doi.org/10.3390/electronics13224575
APA StyleLi, S., Liu, K., & Liu, M. (2024). Adaptive Dynamic Programming-Based Spacecraft Attitude Control Under a Tube-Based Framework. Electronics, 13(22), 4575. https://doi.org/10.3390/electronics13224575