
Research on Fuzzy Active Disturbance Rejection Control of LCL Grid-Connected Inverter Based on Passivity-Based Control in Weak Grid


Abstract
:1. Introduction
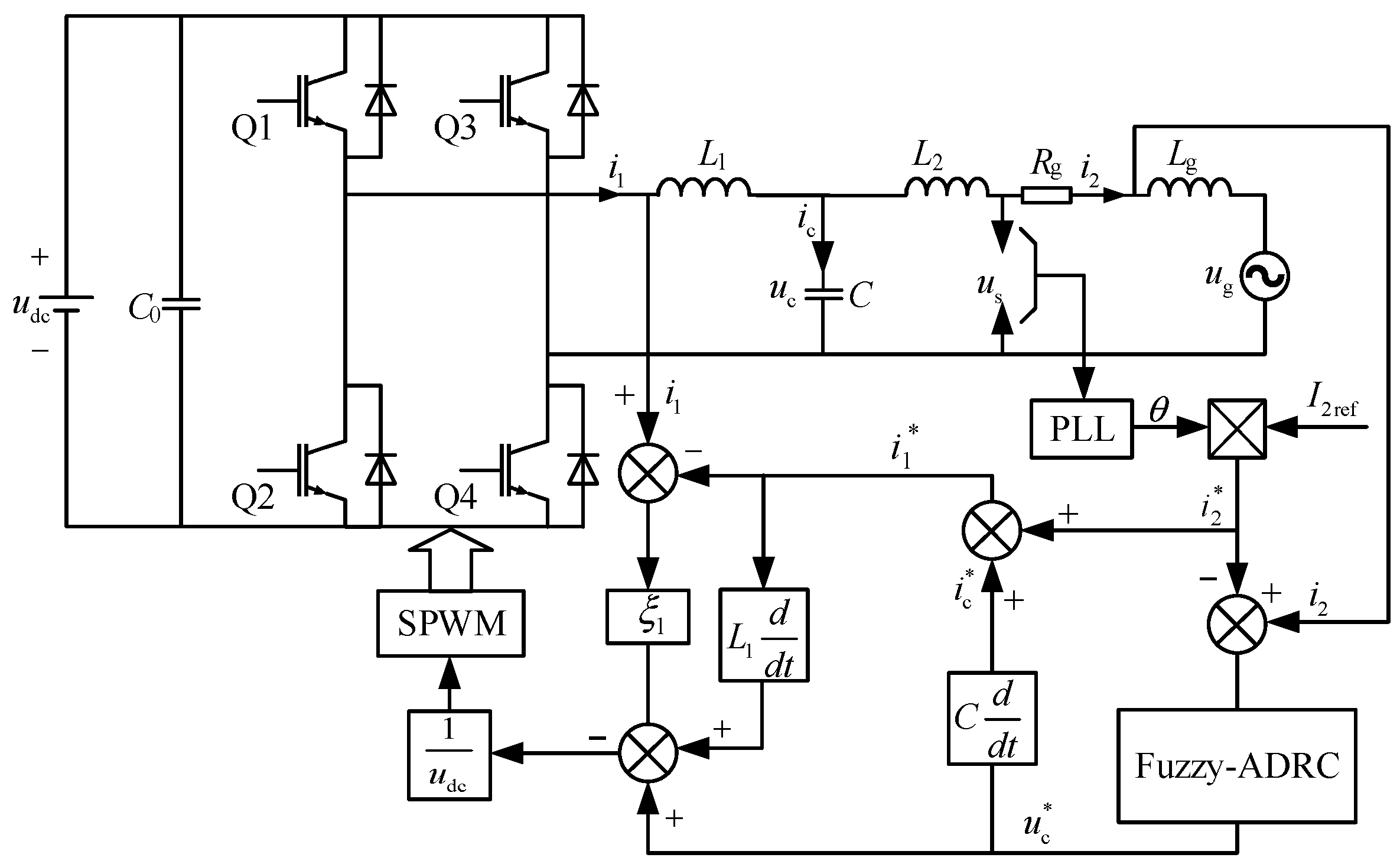
2. EL Mathematical Model of Single-Phase LCL Inverter in Weak Grid
3. Design of Fuzzy-Active Disturbance Rejection Control
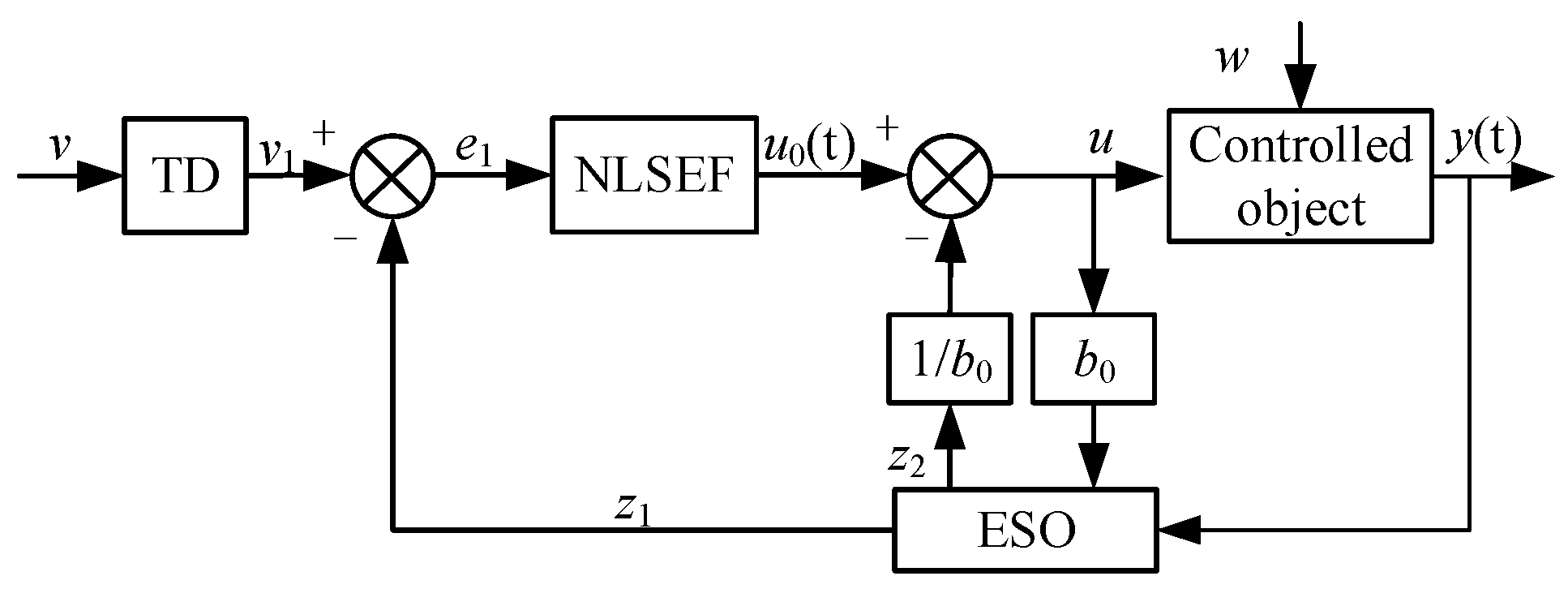
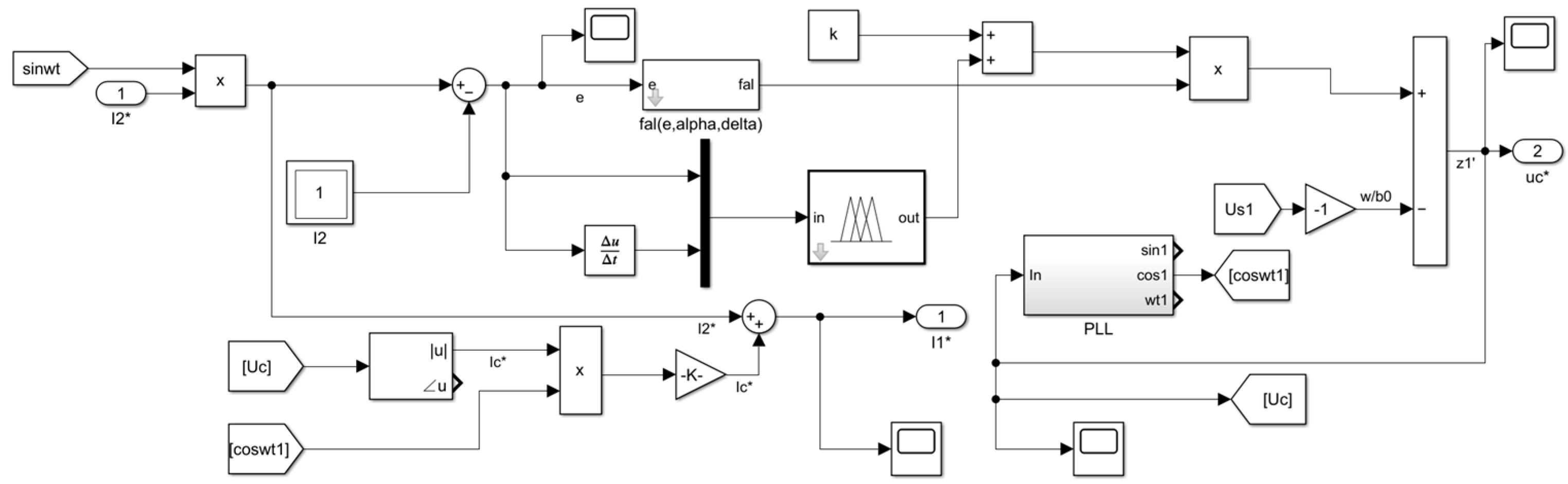
3.1. Active Disturbance Rejection Controller
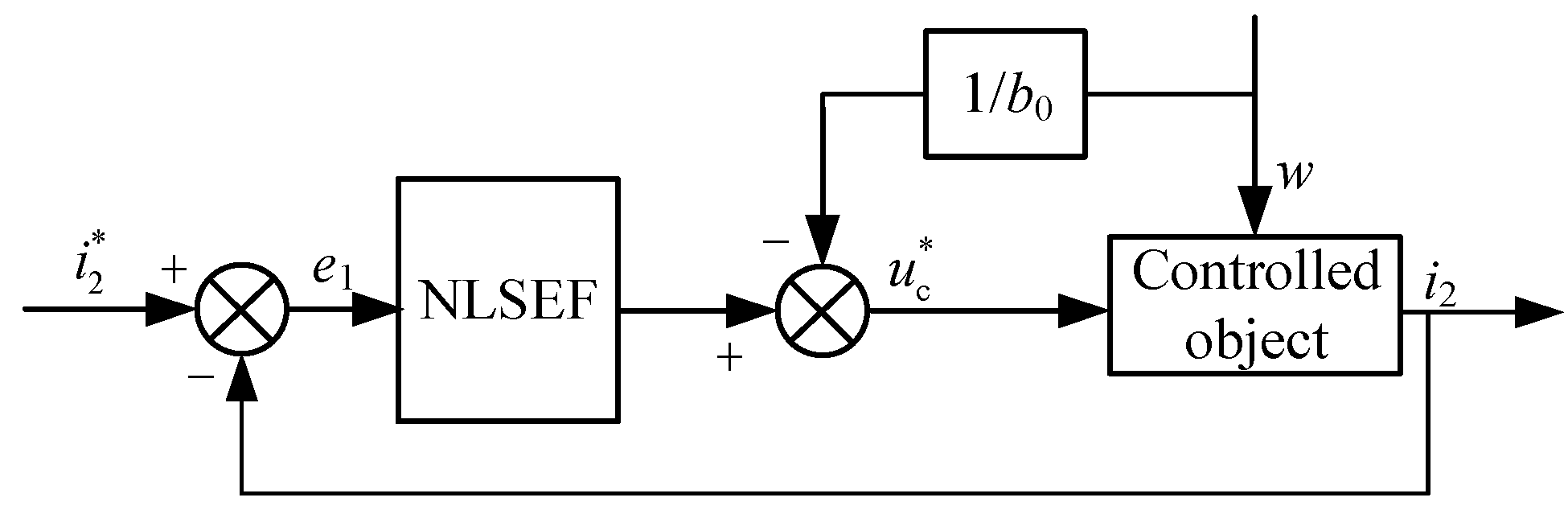
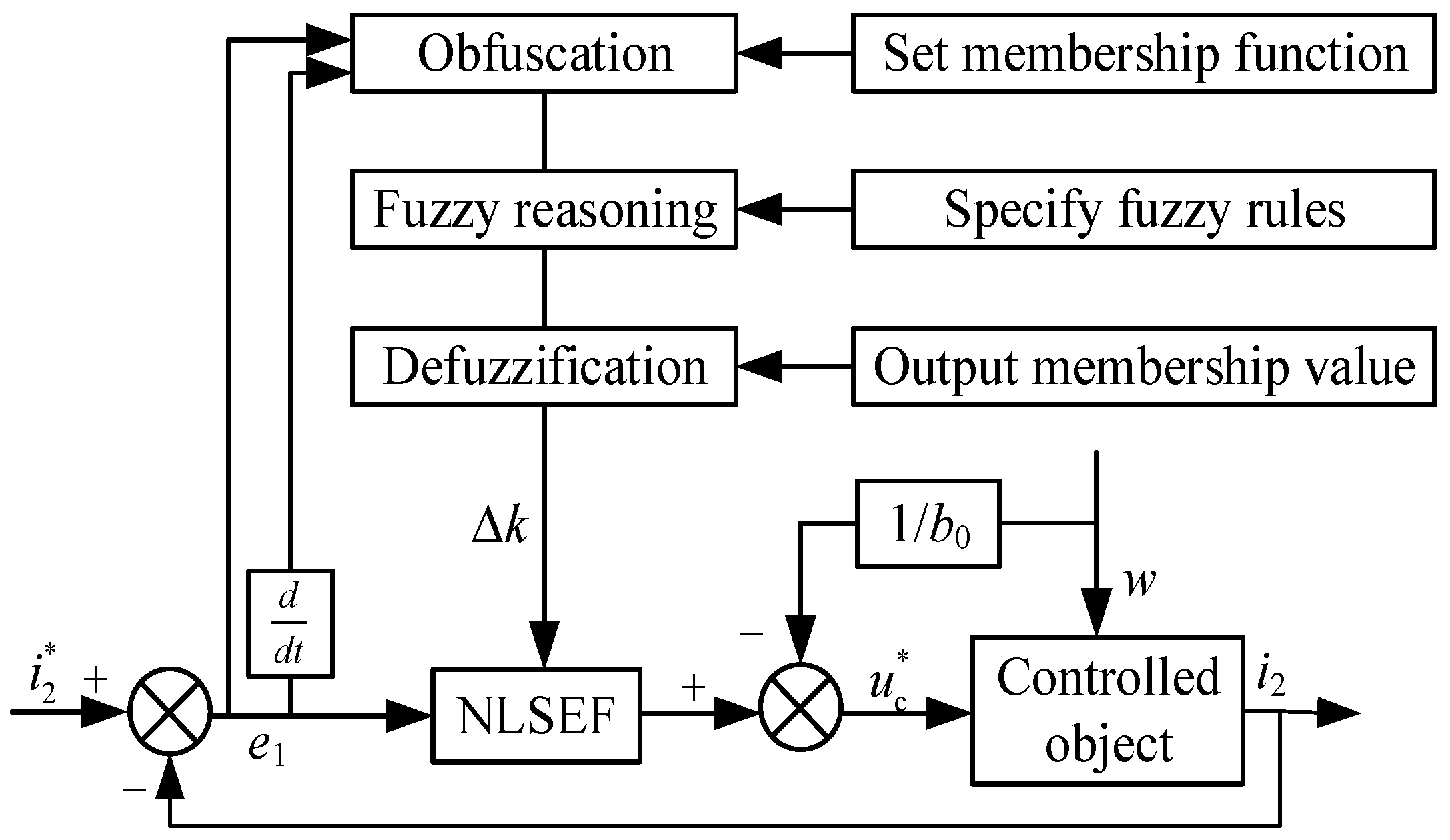
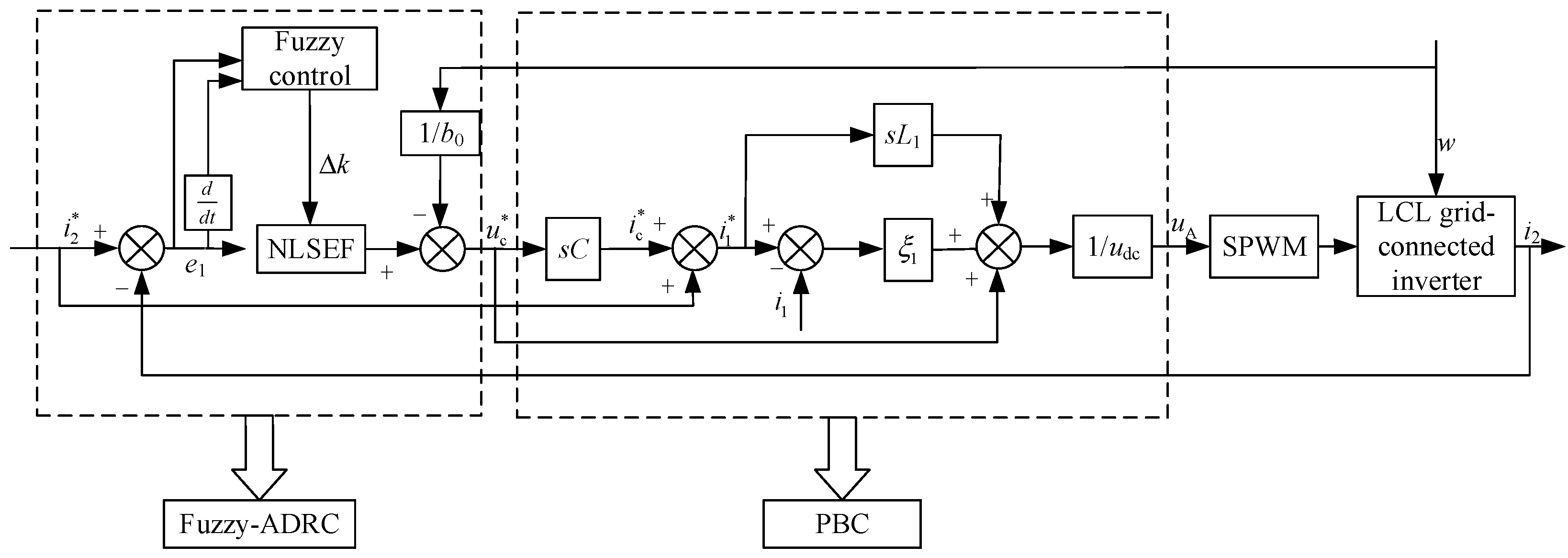
3.2. B. Fuzzy-Active Disturbance Rejection Controller (FUZZY-ADRC) Design
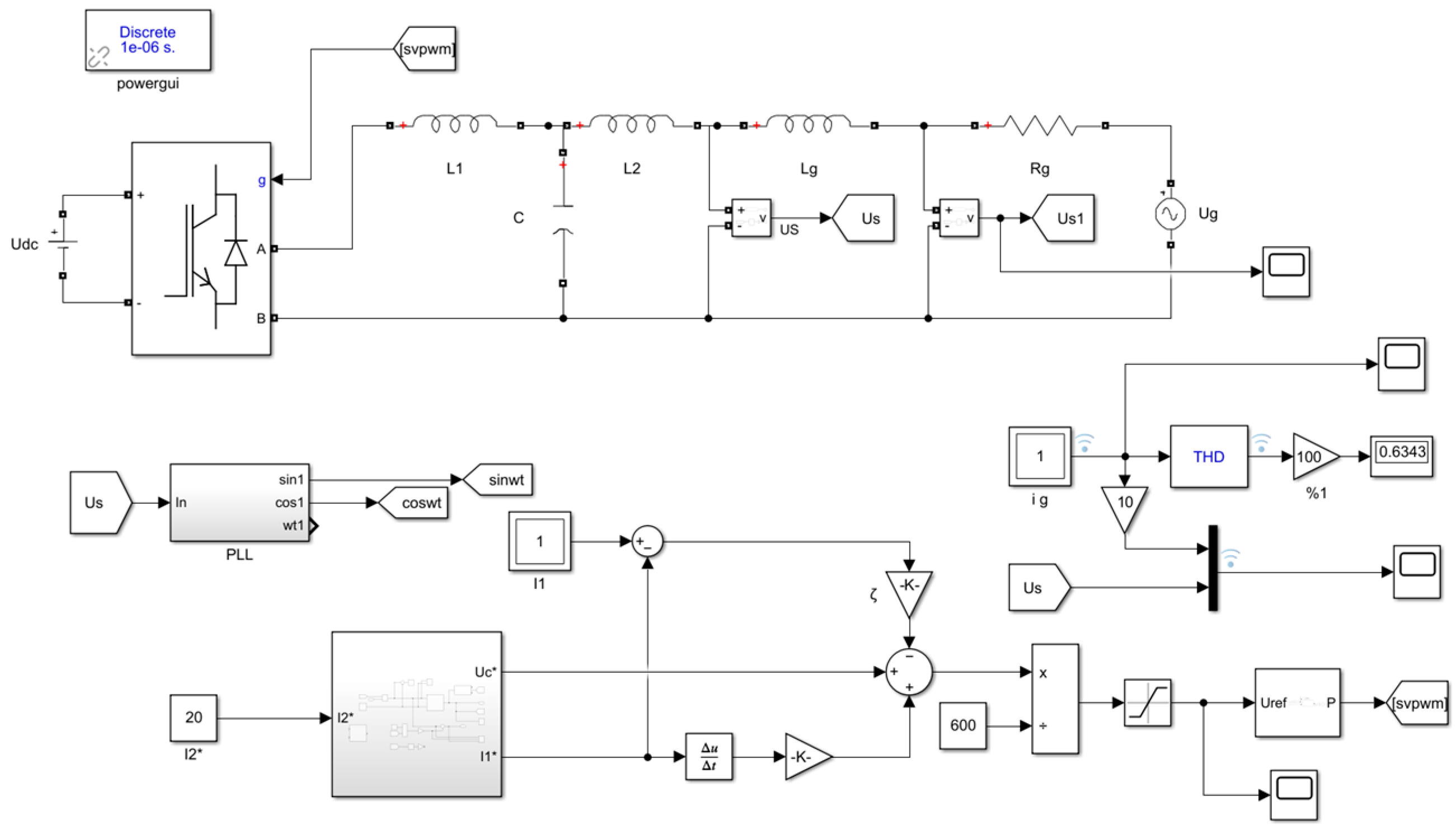
4. Simulation Analysis
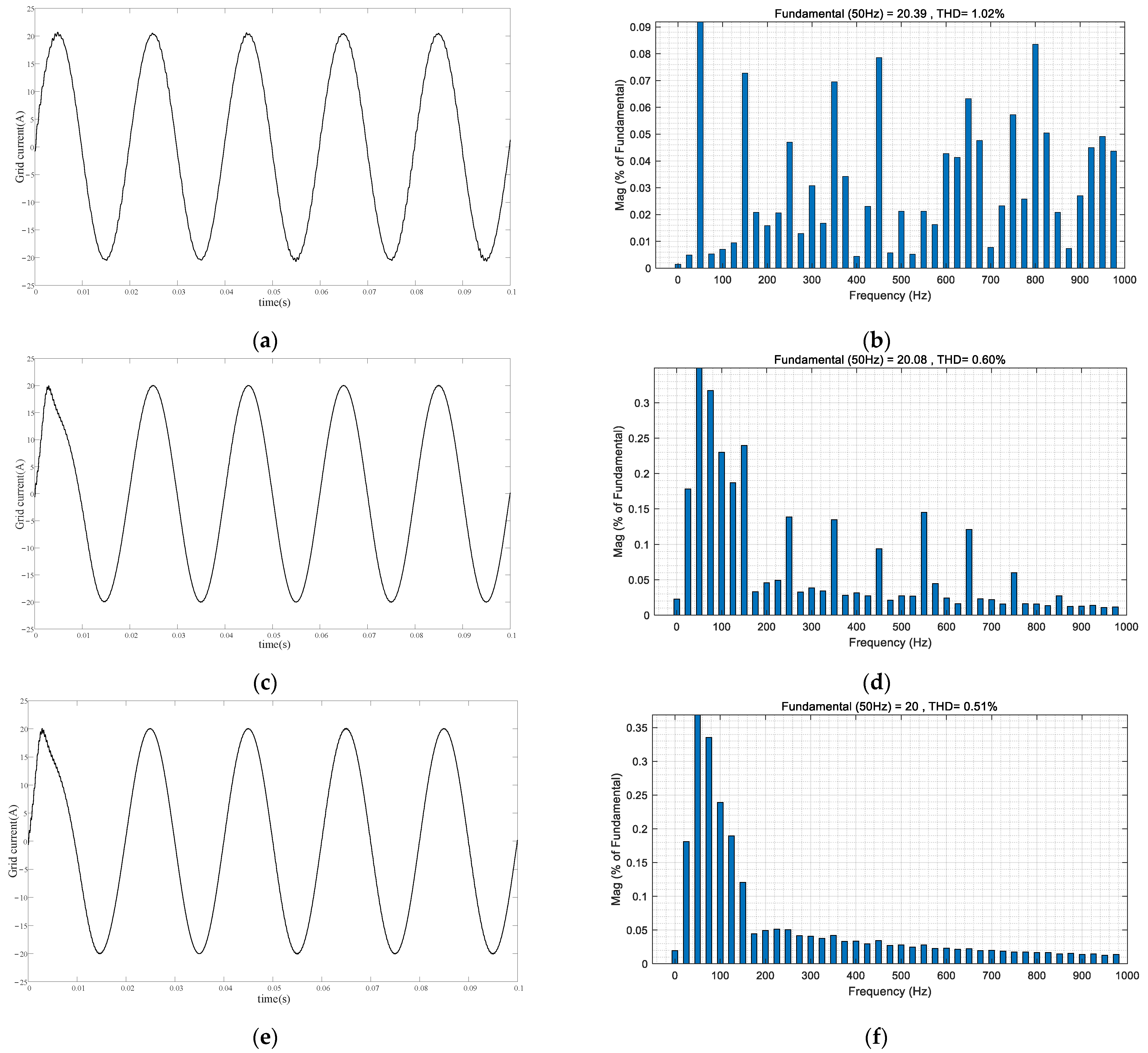
4.1. A. Simulation Results under Strong Grid Conditions
4.2. B. Simulation Results under Weak Grid Conditions
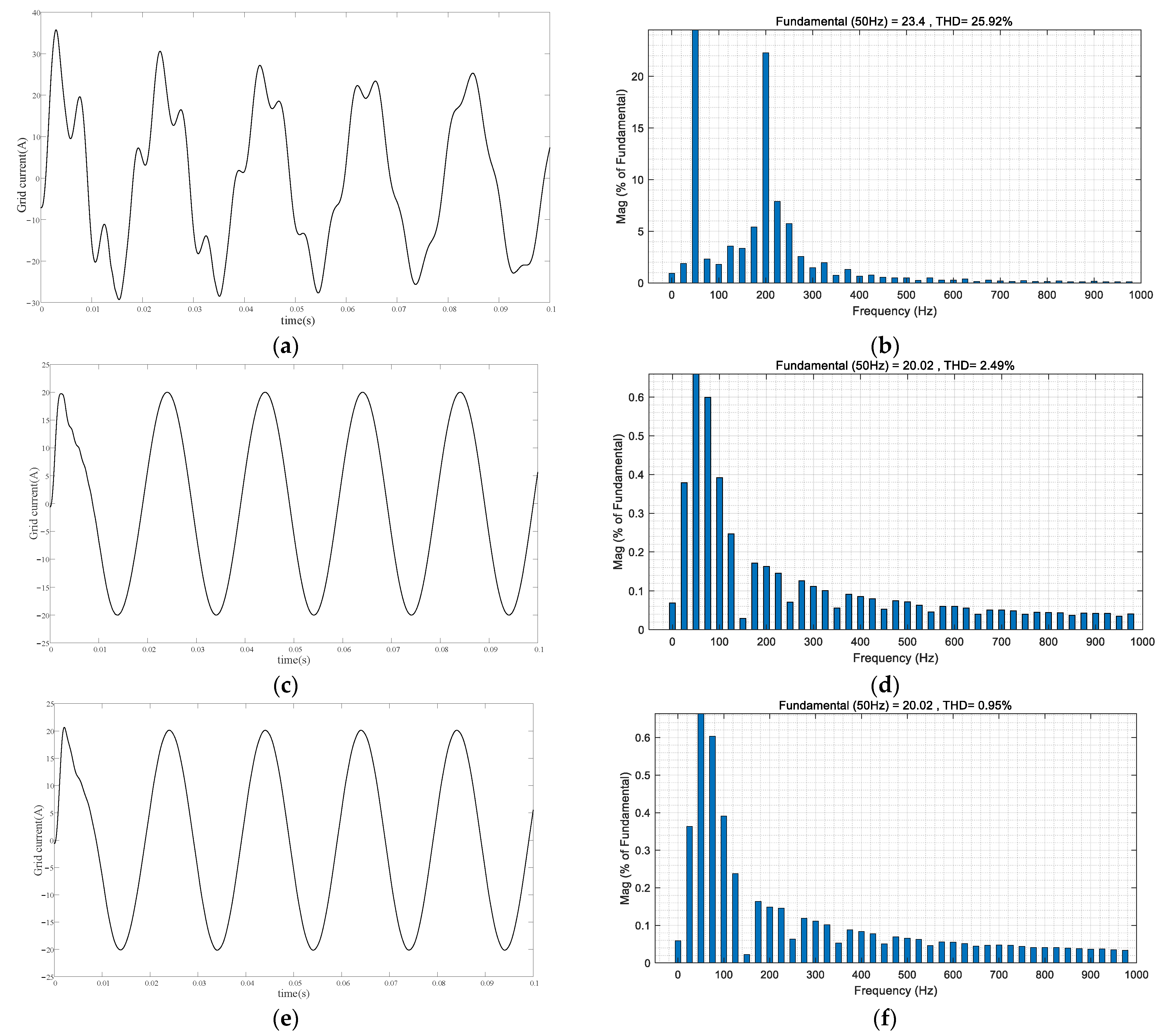
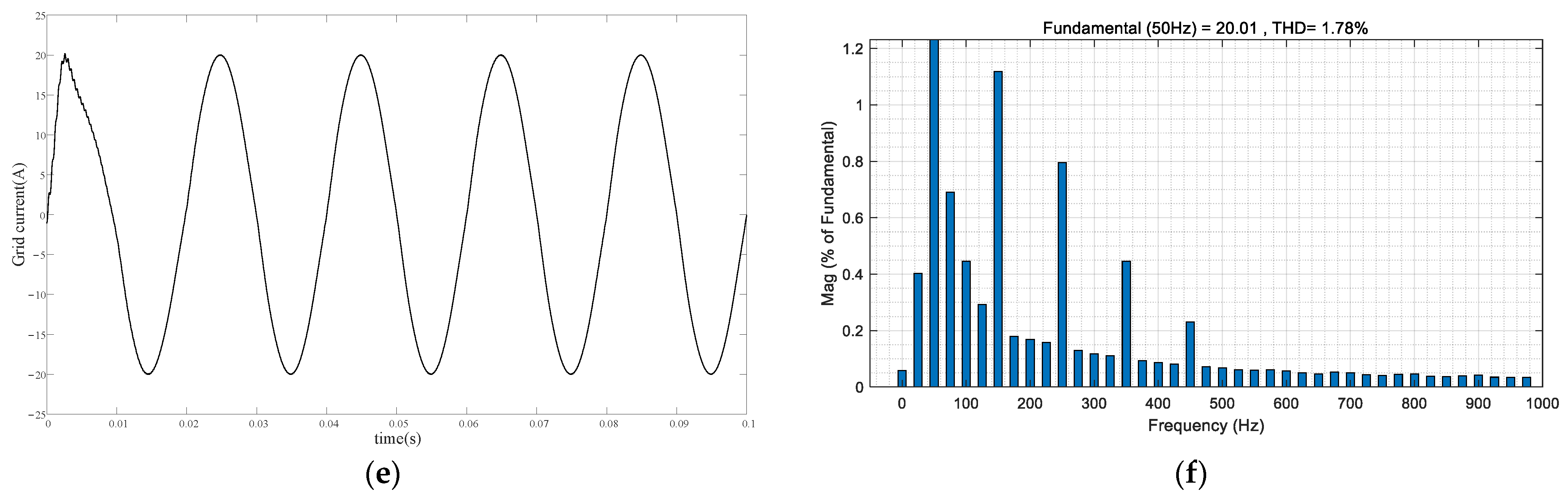
4.3. Grid Background Harmonic Simulation
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Abbreviations
| PBC | Passivity-based control |
| ADRC | Active disturbance rejection control |
| EL | Euler Lagrange |
| PI | Proportional integral control |
| PR | Proportional resonant control |
| TD | Tracking differentiator |
| ESO | Extended state observer |
| NLSEF | Nonlinear state error feedback control law |
| FUZZY-ADRC | Fuzzy-active disturbance rejection controller |
| SCR | Short circuit ratio |
| THD | Total harmonic distortion |
References
- Zhu, D.H.; Zhou, S.Y.; Zou, X.D.; Kang, Y.; Zou, K.F. Small-Signal Disturbance Compensation Control for LCL-Type Grid-Connected Converter in Weak Grid. IEEE Trans. Ind. Appl. 2020, 56, 2852–2861. [Google Scholar] [CrossRef]
- Li, J.G.; Zhang, Y.J.; Zhao, Y.M.; Ren, L.; Wang, J.H.; Liu, Y.F. An Improved Three-Stages Cascading Passivity-Based Control of Grid-Connected LCL Converter in Unbalanced Weak Grid Condition. IEEE Access 2021, 9, 89497–89506. [Google Scholar] [CrossRef]
- Gomes, C.C.; Cupertino, A.F.; Pereira, H.A. Damping techniques for grid-connected voltage source converters based on LCL filter: An overview. Renew. Sustain. Energy Rev. 2018, 81, 116–135. [Google Scholar] [CrossRef]
- Xue, T.Y.; Sun, P.J.; Xu, Z.Z.; Luo, Q.M. Feedforward phase compensation method of LCL grid-connected inverter based on all-pass filter in weak grid. IET Power Electron. 2020, 13, 4407–4416. [Google Scholar] [CrossRef]
- Wu, F.Y.; Sun, Z.; Xu, W.J.; Li, Z.Z.; Lyu, J.G. A Control Parameters Design Method With Multi-Constrains for an LCL-Filtered Grid-Connected Inverter in a Weak Grid. Front. Energy Res. 2022, 9, 1–13. [Google Scholar] [CrossRef]
- Karshenas, H.R.; Saghafi, H. Basic Criteria in Designing LCL Filters for Grid Connected Converters. 2006 IEEE Int. Symp. Ind. Electron. 2006, 3, 1996–2000. [Google Scholar] [CrossRef]
- Yang, X.Q.; Liu, X.Y.; Li, J.C.; Zhang, B.B. Current PI lambda Control of the Single-Phase Grid Inverter. Math. Probl. Eng. 2021, 2021, 1–9. [Google Scholar] [CrossRef]
- Fu, X.G.; Li, S.H. Control of Single-Phase Grid-Connected Converters With LCL Filters Using Recurrent Neural Network and Conventional Control Methods. IEEE Trans. Power Electron. 2016, 31, 5354–5364. [Google Scholar] [CrossRef]
- Li, Y.H.; Zhang, J.; Hao, Z.H.; Tian, P. Improved PR Control Strategy for an LCL Three-Phase Grid-Connected Inverter Based on Active Damping. Appl. Sci. 2021, 11, 3170. [Google Scholar] [CrossRef]
- Zhou, N.; Dong, Y.; Liao, J.; Wang, Q. Pole-mode Transformation of Bipolar DC Systems With Metallic Return and Its Application in Fault Analysis. Zhongguo Dianji Gongcheng Xuebao/Proc. Chin. Soc. Electr. Eng. 2021, 41, 130–142. [Google Scholar] [CrossRef]
- Yang, M.; Bao, J.; Sun, Y.; Wei, Y. Capacitor voltage feedforward control strategy of grid-connected inverter in weak grid. Taiyangneng Xuebao/Acta Energ. Sol. Sin. 2021, 42, 94–102. [Google Scholar] [CrossRef]
- Zhou, W.; Wang, Y.; Torres-Olguin, R.E.; Chen, Z. DQ Impedance Reshaping of Three-Phase Power-Controlled Grid-Connected Inverter for Low-Frequency Stability Improvement Under Weak Grid Condition. In Proceedings of the 2020 IEEE Energy Conversion Congress and Exposition (ECCE), Detroit, MI, USA, 11–15 October 2020; pp. 1678–1685. [Google Scholar] [CrossRef]
- Zhang, Q.; Cai, F.; Huang, L.; Chen, X. PI+ Repetitive Control Applied to Single-Phase Programmable Standard Power Source. Diangong Jishu Xuebao/Trans. China Electrotech. Soc. 2019, 34, 163–170. [Google Scholar] [CrossRef]
- Lv, Z.K.; Sun, L.; Duan, J.D.; Duan, M.H.; Pei, H.J. A novel harmonic impedance compensator based on POHMR-type RC under gird voltage distortion. Int. J. Electr. Power Energy Syst. 2020, 124, 106352. [Google Scholar] [CrossRef]
- Eren, S.; Pahlevaninezhad, M.; Bakhshai, A.; Jain, P.K. Composite Nonlinear Feedback Control and Stability Analysis of a Grid-Connected Voltage Source Inverter With LCL Filter. IEEE Trans. Ind. Electron. 2013, 60, 5059–5074. [Google Scholar] [CrossRef]
- Xie, C.; Li, K.; Zou, J.X.; Guerrero, J.M. Passivity-Based Stabilization of LCL-Type Grid-Connected Inverters via a General Admittance Model. IEEE Trans. Power Electron. 2020, 35, 6636–6648. [Google Scholar] [CrossRef]
- Akhavan, A.; Mohammadi, H.R.; Vasquez, J.C.; Guerrero, J.M. Passivity-Based Design of Plug-and-Play Current-Controlled Grid-Connected Inverters. IEEE Trans. Power Electron. 2020, 35, 2135–2150. [Google Scholar] [CrossRef]
- Zhou, W.; Torres-Olguin, R.E.; Wang, Y.; Chen, Z. A Gray-Box Hierarchical Oscillatory Instability Source Identification Method of Multiple-Inverter-Fed Power Systems. IEEE J. Emerg. Sel. Top. Power Electron. 2021, 9, 3095–3113. [Google Scholar] [CrossRef]
- Wang, B.C.; Shen, Z.Y.; Liu, H.; Hu, J.H. Linear ADRC direct current control of grid-connected inverter with LCL filter for both active damping and grid voltage induced current distortion suppression. IET Power Electron. 2018, 11, 1748–1755. [Google Scholar] [CrossRef]
- Lu, W.; Li, Q.; Lu, K.; Lu, Y.; Guo, L.; Yan, W.; Xu, F. Load Adaptive PMSM Drive System Based on an Improved ADRC for Manipulator Joint. IEEE Access 2021, 9, 33369–33384. [Google Scholar] [CrossRef]
- Cai, Y.X.; He, Y.J.; Zhou, H.W.; Liu, J.J. Active-Damping Disturbance-Rejection Control Strategy of LCL Grid-Connected Inverter Based on Inverter-Side-Current Feedback. IEEE J. Emerg. Sel. Top. Power Electron. 2021, 9, 7183–7198. [Google Scholar] [CrossRef]
- Ma, Y.; Tao, L.; Zhou, X.; Hong, F.; Shi, X.; Zhao, H. Fuzzy adaptive control of voltage loop in wind power system combined with linear active disturbance rejection control. Taiyangneng Xuebao/Acta Energ. Sol. Sin. 2020, 41, 330–337. [Google Scholar]
- Ma, M.; Liao, P.; Cai, Y.; Lei, E.; He, Y. Active Disturbance Rejection Control Strategy of LCL Grid-connected Inverter. Gaodianya Jishu/High Volt. Eng. 2021, 47, 2223–2231. [Google Scholar] [CrossRef]
- Li, P.; Wang, J. Control Strategy of Vienna Rectifier Based on Passivity-based and Active Disturbance Rejection Controller. Dianwang Jishu/Power Syst. Technol. 2022, 46, 1575–1584. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| e | Δe | |||||
|---|---|---|---|---|---|---|
| NB | NM | NS | ZO | PS | PM | |
| NB | PB | PB | PM | PM | PS | ZO |
| NM | PB | PB | PM | PS | PS | ZO |
| NS | PM | PM | PM | PS | ZO | NS |
| ZO | PM | PM | PS | ZO | NS | NM |
| PS | PS | PS | ZO | NS | NS | NM |
| PM | PS | ZO | NS | NM | NM | NM |
| PB | ZO | ZO | NM | NS | NM | NB |
| Parameters | Value |
|---|---|
| Output power: P0/kW | 3.1 |
| DC-link voltage: udc/V | 600 |
| Inverter-side inductor: L1/mH | 4 |
| Filter capacitor: C/uF | 6 |
| Grid-side inductor: L2/mH | 1.5 |
| Grid voltage: ug/V | 220 |
| Grid frequency: f/Hz | 50 |
| Switching frequency: fs/kHz | 10 |
| ξ1 | 1000 |
| k | 120 |
| 0.2 | |
| 0.01 | |
| kp | 10 |
| kr | 300 |
| ke | 10 |
| Control Mode | Grid Current THD/% |
|---|---|
| Conventional control ADRC + PBC | 1.02 0.6 |
| FUZZY-ADRC + PBC | 0.51 |
| Control Mode | Grid Current THD/% |
|---|---|
| Conventional control ADRC + PBC | 25.92 2.49 |
| FUZZY-ADRC + PBC | 0.95 |
| Control Mode | Grid Current THD/% |
|---|---|
| Conventional control ADRC + PBC | 10.86 2.43 |
| FUZZY-ADRC + PBC | 1.78 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yan, H.; Cai, H. Research on Fuzzy Active Disturbance Rejection Control of LCL Grid-Connected Inverter Based on Passivity-Based Control in Weak Grid. Electronics 2023, 12, 1847. https://doi.org/10.3390/electronics12081847
Yan H, Cai H. Research on Fuzzy Active Disturbance Rejection Control of LCL Grid-Connected Inverter Based on Passivity-Based Control in Weak Grid. Electronics. 2023; 12(8):1847. https://doi.org/10.3390/electronics12081847
Chicago/Turabian StyleYan, Hao, and Huafeng Cai. 2023. "Research on Fuzzy Active Disturbance Rejection Control of LCL Grid-Connected Inverter Based on Passivity-Based Control in Weak Grid" Electronics 12, no. 8: 1847. https://doi.org/10.3390/electronics12081847
APA StyleYan, H., & Cai, H. (2023). Research on Fuzzy Active Disturbance Rejection Control of LCL Grid-Connected Inverter Based on Passivity-Based Control in Weak Grid. Electronics, 12(8), 1847. https://doi.org/10.3390/electronics12081847