Abstract
This brief paper analyzes the positivity and asymptotic stability of incommensurate fractional-order coupled neural networks (FOCNNs) with time-varying delays. Under a reasonable assumption about the activation functions of neurons, a sufficient and necessary condition is proposed to guarantee that FOCNNs are positive systems. Furthermore, the sufficient and necessary condition ensuring the asymptotic stability of FOCNNs is also given via introducing a linear auxiliary system. Finally, a simulation experiment was carried out to justify the effectiveness of the derived results.
1. Introduction
As an important artificial neural network, coupled neural networks (CNNs) have attracted considerable attention due to their wide range of applications in the fields of associative memories [1], bioengineering [2], pattern recognition [3], image encryption [4], and machine learning [5]. It is worth emphasizing that the application of fractional calculus for representing the electrical conductivity of biological neuron membranes, as documented in [6], has significantly propelled fractional-order coupled neural networks (FOCNNs) into the limelight. In recent years, many classical results focusing on their dynamical behaviors, such as stability, synchronization, and passivity, have been obtained. For example, in [7], the global stability of complex valued FOCNNs with nodes in unequal dimensions and time delays was analyzed using comparison theory; in [8], the stability analysis of FOCNNs with time delays was investigated; in addition, the stability of two three-dimensional FOCNNs with different ring structures and time delays were analyzed; in [9], the authors studied the quantized output feedback synchronization of FOCNNs with output coupling; in [10], the authors considered the finite-time synchronization of FOCNNs with time-varying delays; the results were proved to be applicable to the FOCNNs without time delays and integer-order neural networks; in [11], the authors innovatively introduced the concept of finite-time passivity for FOCNNs with multiple state coupling or multiple derivative coupling; in [12], based on the existing passivity definition, the authors proposed the concepts of finite-time input strict passivity, finite-time output strict passivity, and finite-time strict passivity for FOCNNs; in addition, novel delay-dependent and order-dependent sufficient conditions ensuring the passivity performances were obtained for FOCNNs. More interesting results can be found in [13,14,15,16,17,18,19].
One the other hand, positive systems theory is indispensable for researching certain actual physical systems whose quantities, including states and inputs, are non-negative, such as ecology [20] and biology [21]. Unsurprisingly, research on fractional-order positive systems has a long history, and some pioneering results have been achieved. For instance, in [22], the necessary and sufficient condition that guarantees the positivity and reachability of fractional-order linear systems (FOLSs) was given, where fractional linear continuous systems were described by a class of state equations; in [23], the authors studied robust stability of positive discrete FOLSs, and proved that the robust stability of the positive discrete FOLSs is equivalent to the robust stability of the corresponding positive discrete system of natural order; in [24], the authors analyzed the -gain performance and -gain performance of positive FOLSs, where the Mittag–Leffler stability is guaranteed using state feedback control; similarly, in [25], the authors addressed the stability problem of positive FOLSs via defining a Lyapunov function, where a state feedback controller was synthesized by means of linear programming. It is worth noting that the objects studied in the above literature are all commensurate FOLSs, i.e., the order of each subsystem is consistent. For more general incommensurate FOLSs, some fascinating work was also reported.
In [26], the sufficient and necessary condition guaranteeing the positivity of incommensurate FOLSs was introduced by virtue of the Laplace transform. In [27], the authors addressed the stability of the incommensurate FOLSs; furthermore, the stability of fractional-order nonlinear systems with multiorder couplings was proposed in a similar manner to the stability of incommensurate FOLSs. In [28], the asymptotic stability and -gain performance of incommensurate positive FOLSs with time-varying delays were investigated, where the obtained stability condition was proved to be independent of the size of bounded delays. However, it should be noted that the systems analyzed in these results are all linear systems. To the best of the authors’ knowledge, there is almost no literature on the stability analysis of positive fractional-order nonlinear systems, particularly in the realm of positive FOCNNs. Although fractional operators, coupled dynamics, and the nonlinearity of activation functions can cause many difficulties in research, the significance of this work is evident due to the wide application of fractional calculus, positive systems, and neural networks in the realm of bioengineering for system modeling.
Drawing on the previous discussion, this paper focuses on the analysis of both positivity and stability for incommensurate FOCNNs with time-varying delays. The paper provides two fundamental conditions, both necessary and sufficient, essential for attaining positivity and asymptotic stability, in which the proposal of the latter relies on a linear auxiliary system under a reasonable assumption for activation functions. Unlike most results on the stability of CNNs with delays, the method used in this paper does not require the construction of the Lyapunov–Krasovskii function.
This paper is organized as follows. Section 2 gives some necessary preliminaries and problem descriptions. The detailed analysis procedure is presented in Section 3. Section 4 performs simulation experiments, and Section 5 concludes this work.
Notation: , , and symbolize the sets of natural numbers, complex numbers, and differentiable functions; denotes the space of the n-dimensional vector; is the n-dimensional identity matrix; indicates that all entries of the matrix are positive (and respectively, non-negative); denotes that the diagonal matrix is positive definite; is an n-dimensional Metzler matrix; is the j-th column of the identity matrix. Moreover, denotes the eigenvalues of A, and represents the largest eigenvalue of A.
2. Preliminaries and Problem Formulation
2.1. Introduction to Fractional Calculus
Definition 1
([29]). The ϑ-th fractional integral is defined as
where is the Euler’s Gamma function, and .
Definition 2
([29]). The ϑ-th Caputo’s fractional derivative is
where , and .
Definition 3
([29]). The Mittage–Leffler function is defined as
where , and .
Lemma 1
([29]). If , one has that
holds for all .
Lemma 2
([28]). Matrix is characterized as Metzler and Hurwitz if, and only if, there exists a column vector , satisfying .
2.2. Problem Description
The following incommensurate FOCNN with time-varying delays is given:
where N denotes the number of neurons, and represent the state and initial condition of the i-th neuron, respectively, is the activation function vector, represents the input vector, and denotes the non-negative time-varying delay, which is bounded. is the order vector with (), and . In addition, , . Moreover, , , and are the coupling strength, the outer coupling matrix, and the inner coupling matrix, respectively. It is assumed that if there exists a directed weight from the j-th neuron to the i-th neuron, otherwise, , and . Assuming the delay satisfies that , we proceed to define the positivity of the FOCNN (2) as follows.
Definition 4.
For any and , if , and holds for all , then the FOCNN (2) is a positive system.
An assumption is required to facilitate the subsequent positivity analysis. Furthermore, unless specifically indicated, the independent variables for all functions are always represented as t.
Assumption 1.
The activation function is a nondecreasing function satisfying and
Remark 1.
Assumption 1 is reasonable for many activation functions that often appear in neural networks, such as the hyperbolic tangent function, the softsign function, and the linear rectification function.
The objective of this paper is to provide two necessary and sufficient conditions that ensure both the positivity and asymptotic stability of FOCNNs.
3. Main Results
This section consists of two subsections. Within the initial subsection, we will present the necessary and sufficient condition that guarantees the positivity of the FOCNN (2), and in the subsequent subsection, we will delve into the analysis of asymptotic stability.
3.1. Positivity Analysis
Theorem 1.
Proof of Theorem 1.
(Sufficiency) Since A is a Metzler matrix, there must exist a constant such that . Then, the FOCNN (2) is equivalent to
The p-th component of the system (3) is
For convenience, let ; then, (4) can be rewritten as
Taking the Laplace transform on both sides of (5), one obtains
where and are the Laplace transforms corresponding to and , respectively. Taking the inverse transform on both sides of (6), then
Let . For any , if the FOCNN (2) is not positive, there must exist a set . Let , then one obtains that holds for all . However, must holds since and , which contradicts the definition of . Therefore, S must be an empty set, i.e., holds true across the interval . Then, it can be concluded that holds for all .
(Necessity) When the FOCNN (2) is a positive system under Assumption 1, let , , and , i.e., this network only consists of two neurons and one weight.
The first neuron is given by
If G is not a non-negative matrix, there must exist an element . Let , then the p-th component of this neuron is
Let , , and with being the h-th column of , then one has . Therefore, there must be a constant such that holds for all . Using Definition 1 and Lemma 1, one has
where , which contradicts the positivity of the FOCNN (2). As a consequence, G is non-negative.
The second neuron is described as
If A is not a Metzler matrix, there must exist a (). When , the p-th component of this neuron is
Let
and , then one has , which implies that there is a constant such that holds for all . Similarly, one obtains
where , which also contradicts the positivity of the network (2). Consequently, A is a Metzler matrix. Let (h can be equal to p) and
then one has . Similar to the above discussion, there is a constant such that satisfies for all , which implies that , in which . Hence, according to the principle of contradiction, B is a non-negative matrix. Finally, let and ( is the h-th column of the m-dimensional identity matrix), which means that the matrix D is non-negative. □
3.2. Asymptotic Stability Analysis
The FOCNN (2) can be rewritten as
in which , , , and .
A linear auxiliary system is defined as
where and are the state and initial condition of the system, respectively, and . Moreover, it is reasonable to contemplate the constant delay system under zero input:
Before giving formal stability results, a lemma needs to be provided to facilitate the analysis.
Lemma 3.
Consider the FOCNN (2) under Assumption 1. When , if holds for all , it can be affirmed that is valid for all .
Proof of Lemma 3.
It is easy to conclude that is a Metzler matrix, and , are non-negative matrices. Since Assumption 1 is met, can be regarded as a non-negative input for the system (19). From [28] (Theorem 1), it can be concluded that is valid for all , i.e., holds for all . □
Lemma 4.
Assume such that . Consequently, for the system (18) with zero input () and initial condition , it follows that: (i) for all ; (ii) for any , it holds that .
Proof of Lemma 4.
(i) Define , then it holds that
Since for any . According to the positivity analysis of the error system (20), it can be demonstrated that for all , implying that holds for all ;
(ii) Consider the arbitrary constant , and define , then it can be deduced that
Lemma 5.
Suppose that and are the trajectories of system (17) with the initial condition and . Then, for means that for .
Proof of Lemma 5.
It can be proved directly from the positivity and the linearity of system (17). □
With reference to Lemmas 3, 4, and 5, the theorem below elucidates the notion of asymptotic stability.
Theorem 2.
Suppose that Assumption 1 holds. Then, the positive FOCNN (2) is asymptotically stable under zero input if, and only if, the matrix is Hurwitz.
Proof of Theorem 2.
(Sufficiency) Since , the linear system (17) and (18) must be the positive system. Suppose that and are the trajectories of system (17) and (18) with the initial condition . Since is a Hurwitz matrix, based on Lemma 2, it can be concluded that there exists a column vector , satisfying . Moreover, there always exists a constant , such that for . From [28] (Proposition 1), it is obvious that . Define , then we have . By Lemma 4, it is shown that for all , and . In addition, from Lemma 5, one can obtain that and , which implies that the system (17) is asymptotically stable, i.e., . Therefore, it follows from that using the squeeze theorem, which means that the FOCNN (2) is asymptotically stable.
(Necessity) Let , , and , where is a constant. Then, (16) can be rewritten as
in which . Since this system is asymptotically stable, in the light of [29], one has . It is easy to see that is a Metzler matrix, which implies that there must exist a constant such that . Using the Perron–Frobenius theorem, must be a singlet eigenvalue that is a real number. Let be the eigenvector of , then one has
which means that is a real number. Since , which excludes the positive real part, must be a negative number. Therefore, is a Hurwitz matrix. □
Remark 2.
The purpose of introducing the auxiliary system (17) is to avoid defining the Lyapunov function for the stability analysis. In the context of integer-order systems featuring time-varying delays, the stability analysis commonly relies on the utilization of the Lyapunov–Krasovskii function. However, in the case of fractional-order systems, especially those involving incommensurate fractional orders, this method is rendered impractical due to the intricate nature of the fractional derivative of a composite function, characterized by a complex infinite series.
4. Simulation
Consider the following FOCNN constructed using four neurons:
with , and . Under the initial condition , , ,, , and constant . The coefficient matrices of the system (23) are :
and
It is obvious that the matrix A is Metzler, and B, D, and G are non-negative matrices. In addition, is a Hurwitz matrix using the MATLAB R2019 toolbox, which means that system (17) is asymptoically stable. Moreover, the states of the four neurons are depicted in Figure 1, Figure 2, Figure 3 and Figure 4. From Figure 1, Figure 2, Figure 3 and Figure 4, it is obvious that , , are quite close to zero when time t increases to 20s, and these states can be maintained with increasing time. Also, we can see that the state trajectories of FOCNN (23) remain positive all the time, which clearly shows that the FOCNN (23) is positive and asymptotically stable.
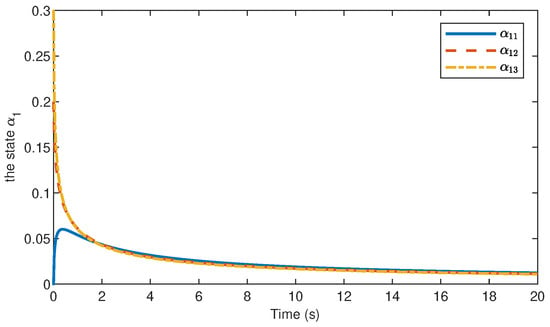
Figure 1.
The state trajectory of the first neuron of the FOCNN (23).
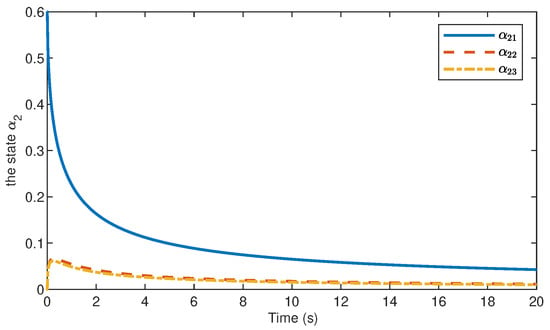
Figure 2.
The state trajectory of the second neuron of the FOCNN (23).
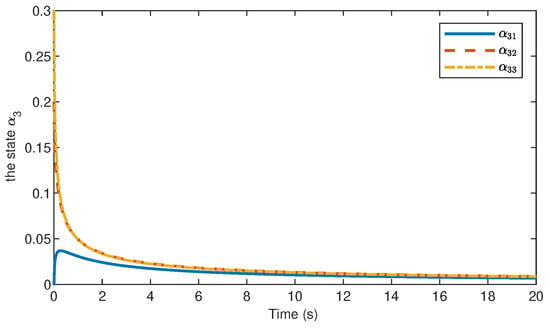
Figure 3.
The state trajectory of the third neuron of the FOCNN (23).
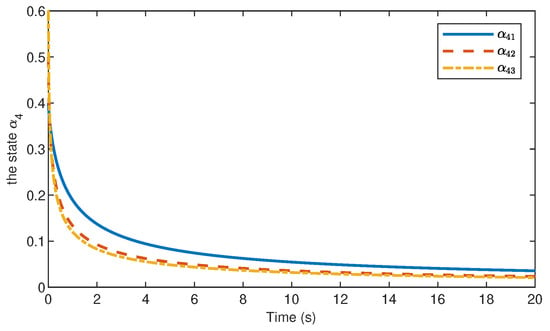
Figure 4.
The state trajectory of the fourth neuron of the FOCNN (23).
5. Conclusions
Within this paper, the problem of positivity and asymptotic stability in incommensurate FOCNNs characterized by time-varying delays is addressed. Our contributions encompass the presentation of two necessary and sufficient conditions that ensure both positivity and asymptotic stability in FOCNNs. Moving forward, our research endeavors will be directed towards the exploration of positivity and stability aspects in a wider array of fractional-order nonlinear systems and singular FOCNNs with time-varying delays.
Author Contributions
Methodology, J.G., H.Q. and J.S.; software, J.G.; writing—original draft preparation, J.G.; writing—review and editing, H.Q.; supervision, J.S.; funding acquisition, J.S. All authors have read and agreed to the published version of the manuscript.
Funding
This research was funded by the National Natural Science Foundation of China under Grant 61973156.
Data Availability Statement
The datasets generated and analyzed during the current study are not publicly available but are available from the corresponding author on reasonable request.
Conflicts of Interest
The authors declare no potential conflict of interests.
Abbreviations
The following abbreviations are used in this manuscript:
| CNNs | Coupled neural networks |
| FOCNNs | Fractional-order coupled neural networks |
| FOLSs | Fractional-order linear systems |
References
- Wang, T.; Wang, K.; Jia, N. Chaos control and associative memory of a time-delay globally coupled neural network using symmetric map. Neurocomputing 2011, 74, 1673–1680. [Google Scholar] [CrossRef]
- Keren, H.; Partzsch, J.; Marom, S.; Mayr, C.G. A biohybrid setup for coupling biological and neuromorphic neural networks. Front. Neurosci. 2019, 13, 432. [Google Scholar] [CrossRef] [PubMed]
- Mureşan, R.C. Pattern recognition using pulse-coupled neural networks and discrete Fourier transforms. Neurocomputing 2003, 51, 487–493. [Google Scholar] [CrossRef]
- Ouyang, D.; Shao, J.; Jiang, H.; Nguang, S.K.; Shen, H.T. Impulsive synchronization of coupled delayed neural networks with actuator saturation and its application to image encryption. Neural Netw. 2020, 128, 158–171. [Google Scholar] [CrossRef]
- Zhang, X.; Garikipati, K. Machine learning materials physics: Multi-resolution neural networks learn the free energy and nonlinear elastic response of evolving microstructures. Comput. Methods Appl. Mech. Eng. 2020, 372, 113362. [Google Scholar] [CrossRef]
- Cole, K.S. Electric conductance of biological systems. In Proceedings of the Cold Spring Harbor Symposia on Quantitative Biology; Cold Spring Harbor Laboratory Press: New York, NY, USA, 1933; Volume 1, pp. 107–116. [Google Scholar]
- Tan, M.; Pan, Q. Global stability analysis of delayed complex-valued fractional-order coupled neural networks with nodes of different dimensions. Int. J. Mach. Learn. Cybern. 2019, 10, 897–912. [Google Scholar] [CrossRef]
- Wang, H.; Yu, Y.; Wen, G.; Zhang, S. Stability analysis of fractional-order neural networks with time delay. Neural Process. Lett. 2015, 42, 479–500. [Google Scholar] [CrossRef]
- Bao, H.; Park, J.H.; Cao, J. Adaptive synchronization of fractional-order output-coupling neural networks via quantized output control. IEEE Trans. Neural Netw. Learn. Syst. 2020, 32, 3230–3239. [Google Scholar] [CrossRef]
- Li, Y.; Xu, M.; Sun, J.; Liu, N.; Yu, P.; Liu, P. Finite-time Synchronization of Fractional-Order Neural Networks With Time-Varying Delays. In Proceedings of the 2021 11th International Conference on Information Science and Technology (ICIST), Chengdu, China, 21–23 May 2021; pp. 668–672. [Google Scholar]
- Liu, C.G.; Wang, J.L.; Wu, H.N. Finite-Time Passivity for Coupled Fractional-Order Neural Networks With Multistate or Multiderivative Couplings. IEEE Trans. Neural Netw. Learn. Syst. 2021, 34, 5976–5987. [Google Scholar] [CrossRef]
- Shafiya, M.; Nagamani, G. New finite-time passivity criteria for delayed fractional-order neural networks based on Lyapunov function approach. Chaos Solitons Fractals 2022, 158, 112005. [Google Scholar] [CrossRef]
- Liu, C.G.; Wang, J.L. Passivity of fractional-order coupled neural networks with multiple state/derivative couplings. Neurocomputing 2021, 455, 379–389. [Google Scholar] [CrossRef]
- Li, H.L.; Kao, Y.; Hu, C.; Jiang, H.; Jiang, Y.L. Robust exponential stability of fractional-order coupled quaternion-valued neural networks with parametric uncertainties and impulsive effects. Chaos Solitons Fractals 2021, 143, 110598. [Google Scholar] [CrossRef]
- Bao, H.; Park, J.H.; Cao, J. Synchronization of fractional-order delayed neural networks with hybrid coupling. Complexity 2016, 21, 106–112. [Google Scholar] [CrossRef]
- Qiu, H.; Wang, H.; Pan, Y.; Cao, J.; Liu, H. Stability and L∞-Gain of Positive Fractional-Order Singular Systems With Time-Varying Delays. IEEE Trans. Circuits Syst. II Express Briefs 2023, 70, 3534–3538. [Google Scholar] [CrossRef]
- Fei, C.; Shen, J. Machine learning for securing Cyber–Physical Systems under cyber attacks: A survey. Frankl. Open 2023, 4, 100041. [Google Scholar] [CrossRef]
- Qiu, H.; Cao, J.; Liu, H. Stability and L∞-gain of positive fractional-order coupled differential-difference systems with unbounded time-varying delays. Chaos Solitons Fractals 2023, 175, 113948. [Google Scholar] [CrossRef]
- Leutcho, G.D.; Woodward, L.; Blanchard, F. Nonlinear dynamics of a single-gap terahertz split-ring resonator under electromagnetic radiation. Chaos Interdiscip. J. Nonlinear Sci. 2023, 33, 103131. [Google Scholar] [CrossRef]
- Caswell, H. Matrix Population Models; Sinauer: Sunderland, MA, USA, 2000; Volume 1. [Google Scholar]
- Jacquez, J.A. Compartmental Analysis in Biology and Medicine; Elsevier Publishing Company: Amsterdam, The Netherlands, 1972. [Google Scholar]
- Kaczorek, T. Fractional Positive Continuous-Time Linear Systems and Their Reachability. Int. J. Appl. Math. Comput. Sci. 2008, 18, 223–228. [Google Scholar] [CrossRef]
- Busłowicz, M. Robust stability of positive discrete-time linear systems of fractional order. Bull. Pol. Acad. Sci. Tech. Sci. 2010, 58, 567–572. [Google Scholar] [CrossRef]
- Wang, C.; Zhao, Y. Performance analysis and control of fractional-order positive systems. IET Control Theory Appl. 2019, 13, 928–934. [Google Scholar] [CrossRef]
- Benzaouia, A.; Hmamed, A.; Mesquine, F.; Benhayoun, M.; Tadeo, F. Stabilization of continuous-time fractional positive systems by using a Lyapunov function. IEEE Trans. Autom. Control 2014, 59, 2203–2208. [Google Scholar] [CrossRef]
- Kaczorek, T. Positive linear systems consisting of n subsystems with different fractional orders. IEEE Trans. Circuits Syst. I Regul. Pap. 2011, 58, 1203–1210. [Google Scholar] [CrossRef]
- Chen, L.; Gu, P.; Lopes, A.M.; Chai, Y.; Xu, S.; Ge, S. Asymptotic Stability of Fractional-Order Incommensurate Neural Networks. Neural Process. Lett. 2023, 55, 5499–5513. [Google Scholar] [CrossRef]
- Shen, J.; Lam, J. Stability and performance analysis for positive fractional-order systems with time-varying delays. IEEE Trans. Autom. Control 2015, 61, 2676–2681. [Google Scholar] [CrossRef]
- Podlubny, I. Fractional Differential Equations: An Introduction to Fractional Derivatives, Fractional Differential Equations, to Methods of Their Solution and Some of Their Applications; Elsevier: Amsterdam, The Netherlands, 1998. [Google Scholar]
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).