
Self-Tuning Process Noise in Variational Bayesian Adaptive Kalman Filter for Target Tracking


Abstract
:1. Introduction
- To further improve the VBAKF algorithm in dynamic systems and to improve the adaptability of PNCM, the proposed AQ-VBAKF algorithm can not only estimate the MNCM online, but can also self-tune the PNCM in real time. Therefore, the AQ-VBAKF can adapt to the input variable signals in the linear dynamic system.
- The VBAKF algorithm can only estimate the MNCM, but the PNCM stays constant during the whole filtering process, which will decrease the filtering performance. In the proposed algorithm, the adaptive factor is introduced to tune the PNCM in real time, meaning the fixed PNCM does not cause a decline in the VBAKF estimation accuracy at each iteration.
- The proposed algorithm is evaluated using the target tracking simulation. Based on a series of experiments, the proposed AQ-VBAKF can improve the filtering accuracy and robustness in comparison with other filtering methods under dynamic conditions. Moreover, the computational burden is not heavy, thus it can be applied in practical systems.
2. State-Space Model and Problem Statement
3. Proposed AQ-VBAKF Algorithm
3.1. Variational Bayesian Approximation for MNCM ()
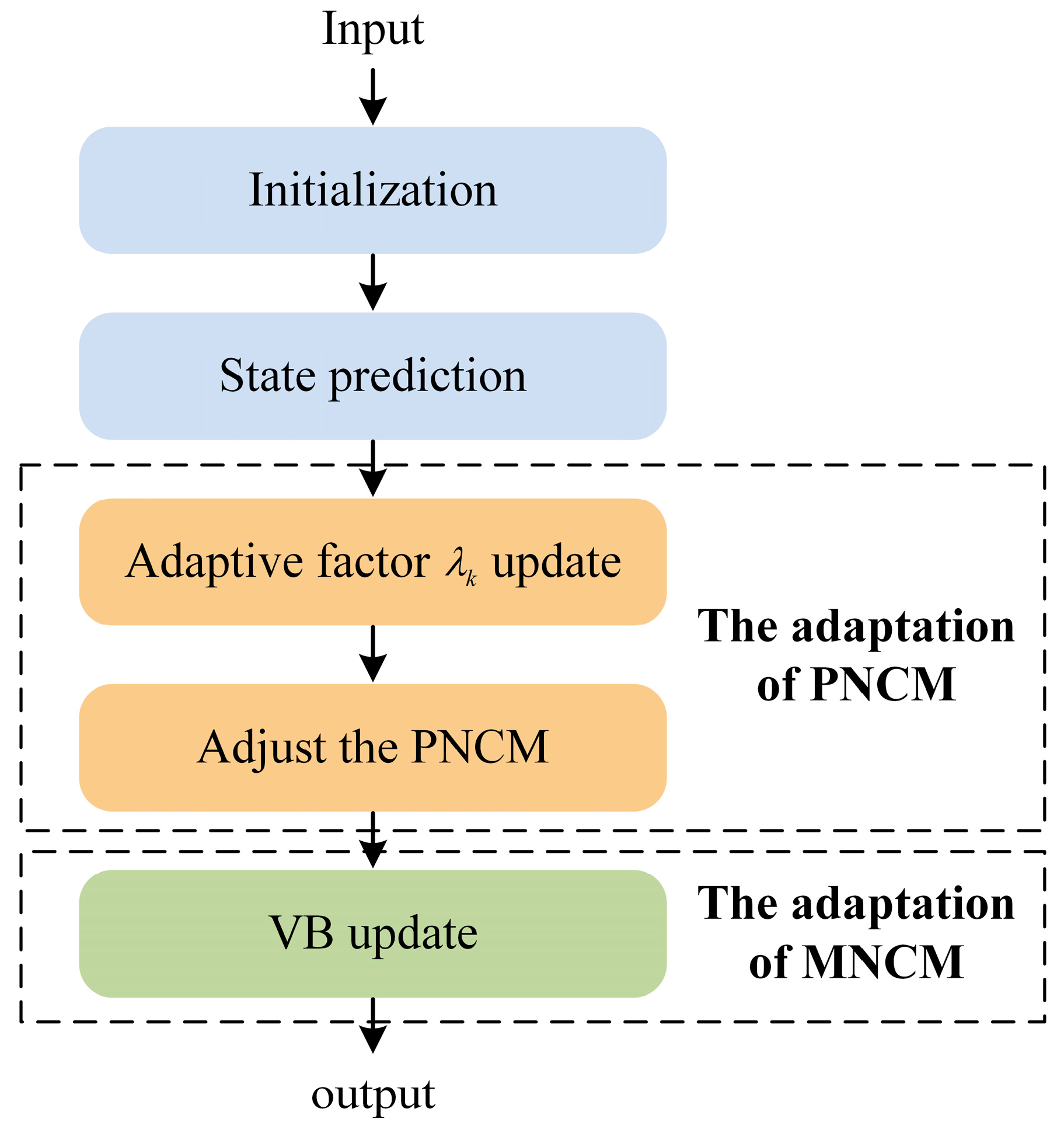
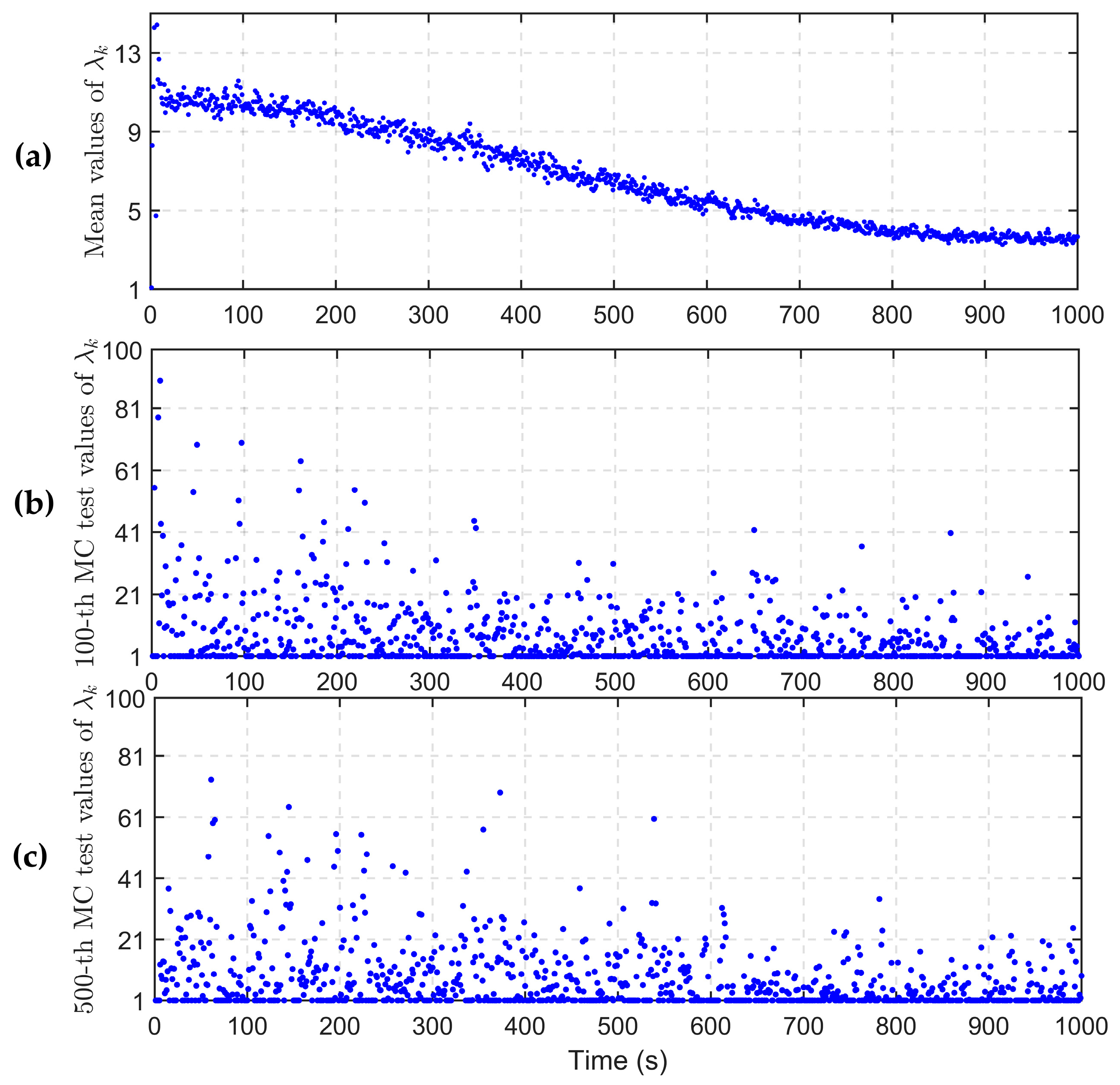
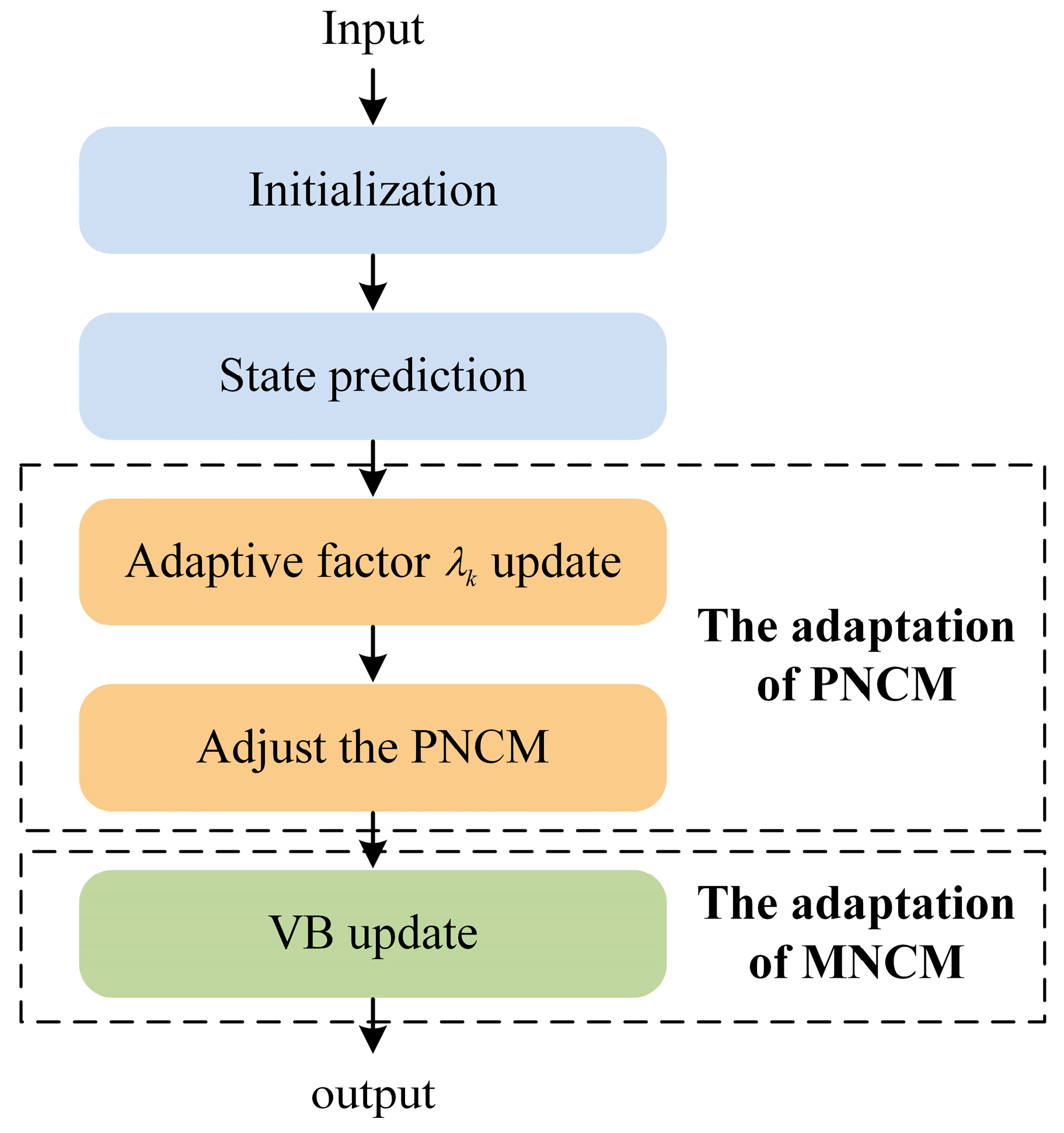
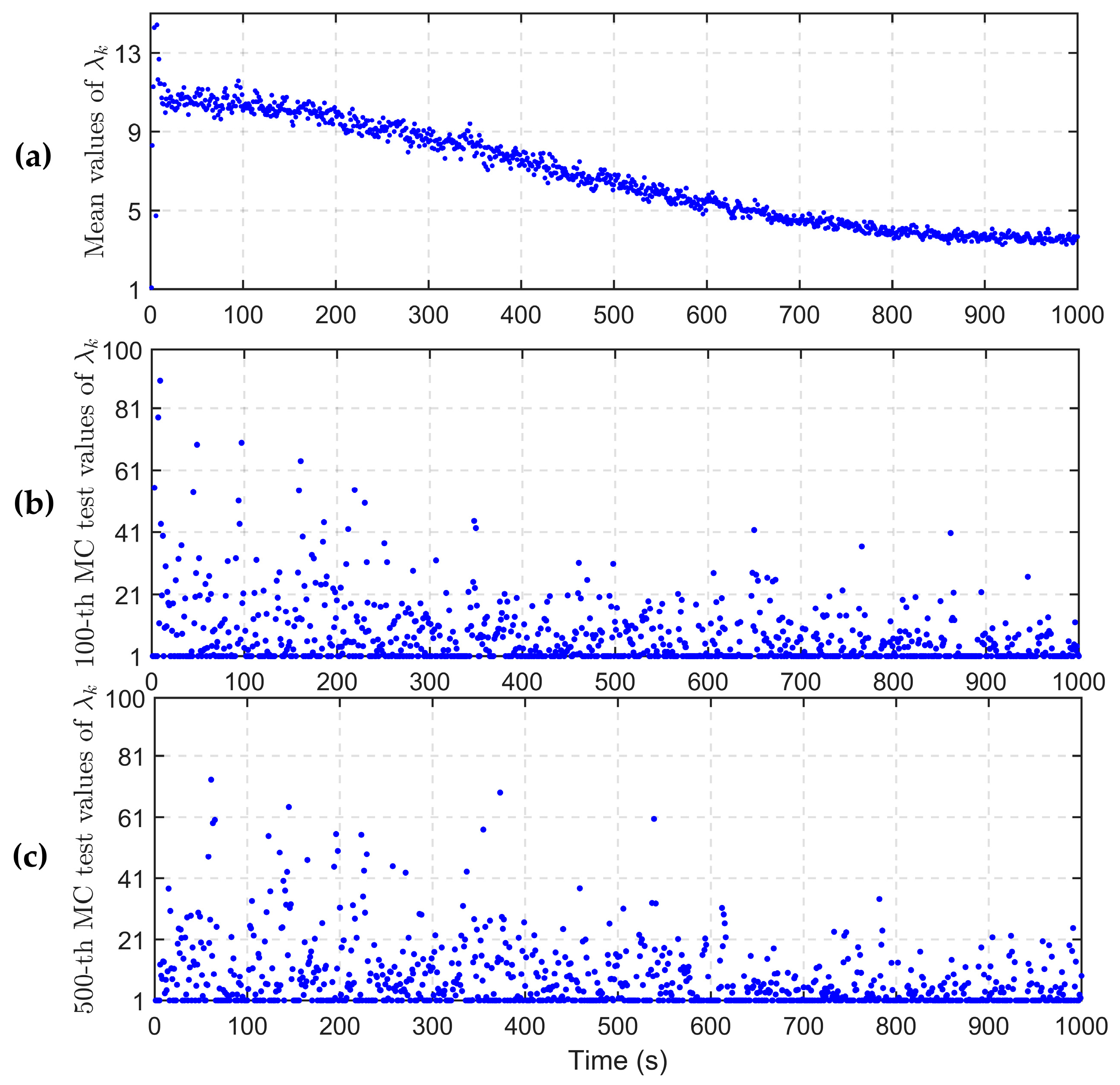
3.2. Adaptation of PNCM ()
3.3. Proposed Algorithm
| Algorithm 1: Proposed AQ-VBAKF Algorithm |
| Input: , , , , , , , , , N, , S, |
| Time update for state values: 1: can be obtained via Equation (3). The adaptive factor update and the time update for : 2: The adaptive factor is computed using Equations (30), (37), and (39). 3: is obtained with Equation (28). VB estimation update: 4: Initialization: , , For s = 1: S 5: Update using Equations (21)–(23) 6: is obtained with 7: and are obtained via Equations (25)–(27) End Output: , , , |
4. Simulation Verification and Analysis
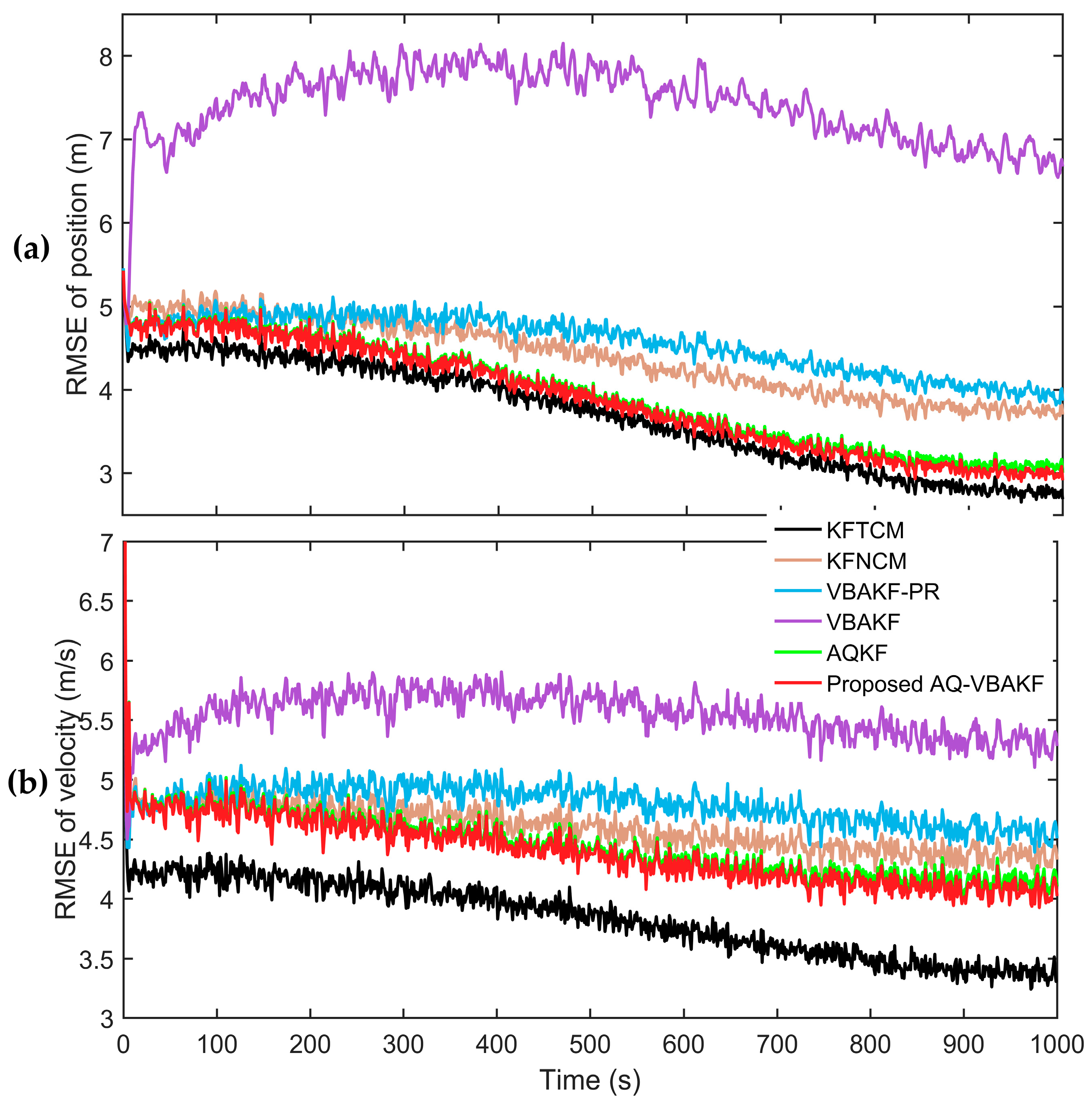
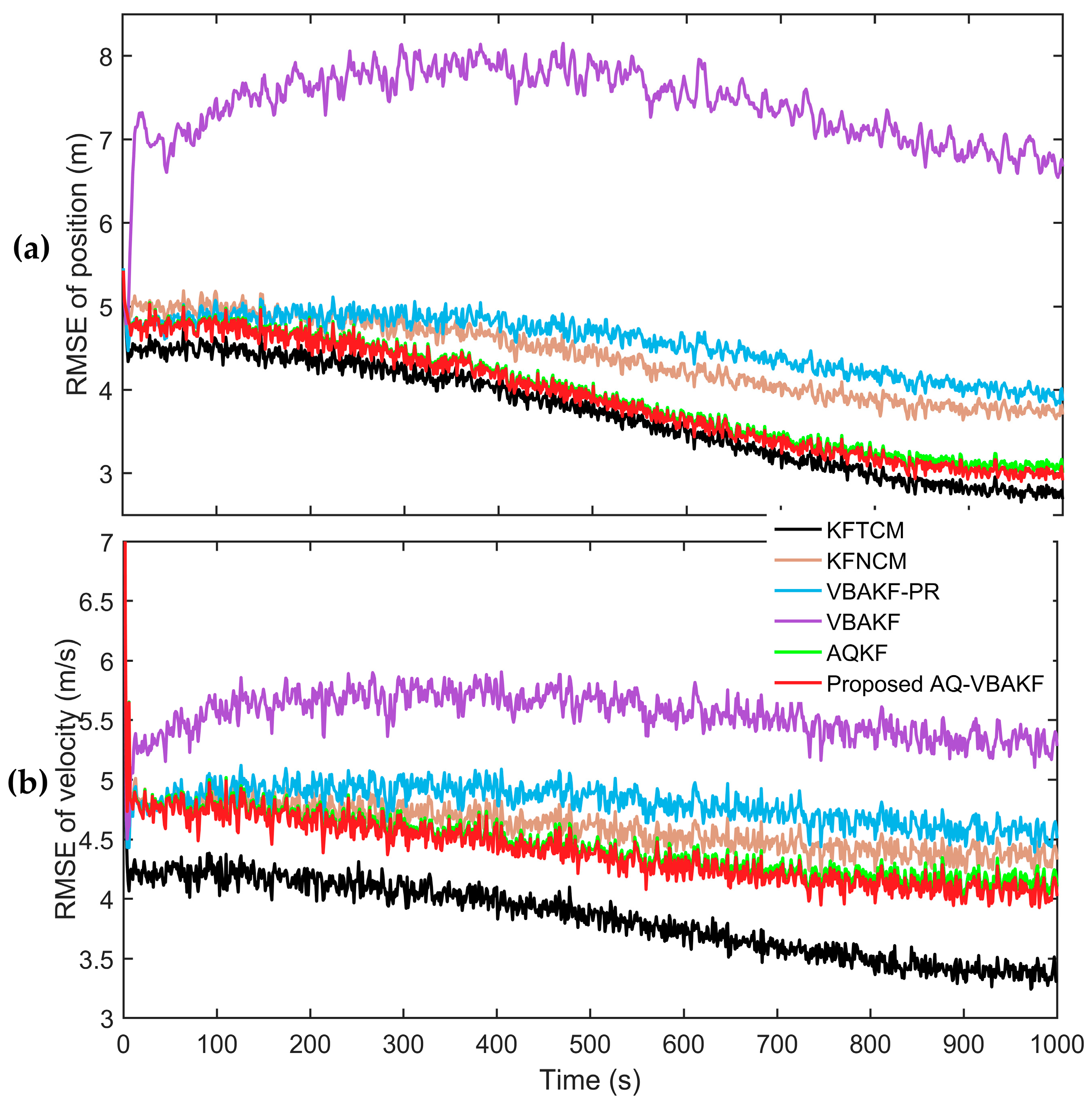
4.1. Estimation Performance Analysis
- KFTCM algorithm: the KF is iterated with true covariance matrices (KFTCM), which act as a reference.
- KFNCM algorithm: the KF is iterated with nominal covariance matrices (KFNCM), which are and . and are fixed during the filtering process.
- AQKF algorithm: the KF is iterated with the adaptive ; only is adjusted based on the previous Section 3.2, and is fixed throughout the whole process.
- VBKF algorithm: is updated using the VB method and is constant throughout the whole process.
- VBAKF-PR algorithm: the VBAKF-PR algorithm was demonstrated in [14].
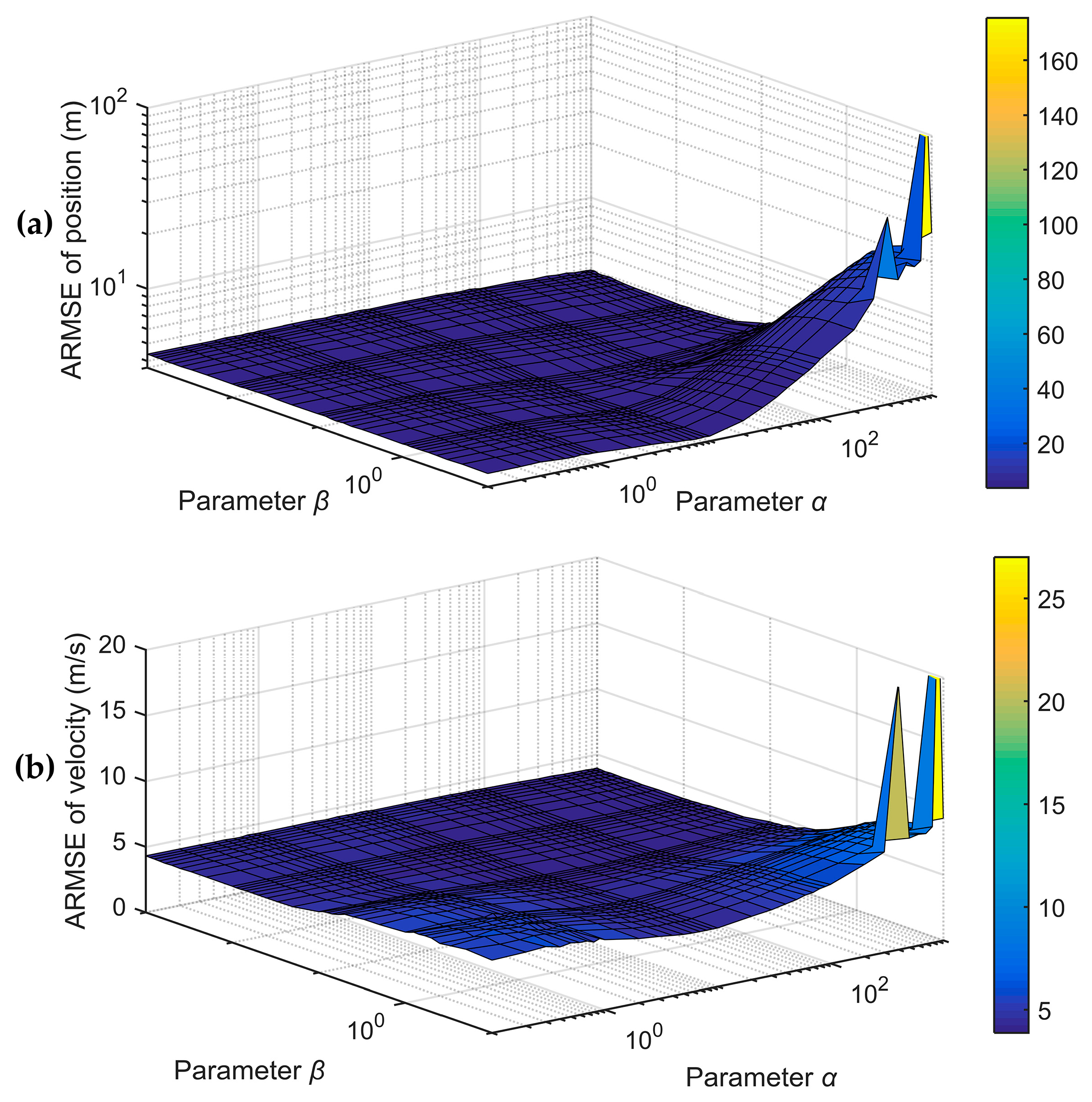
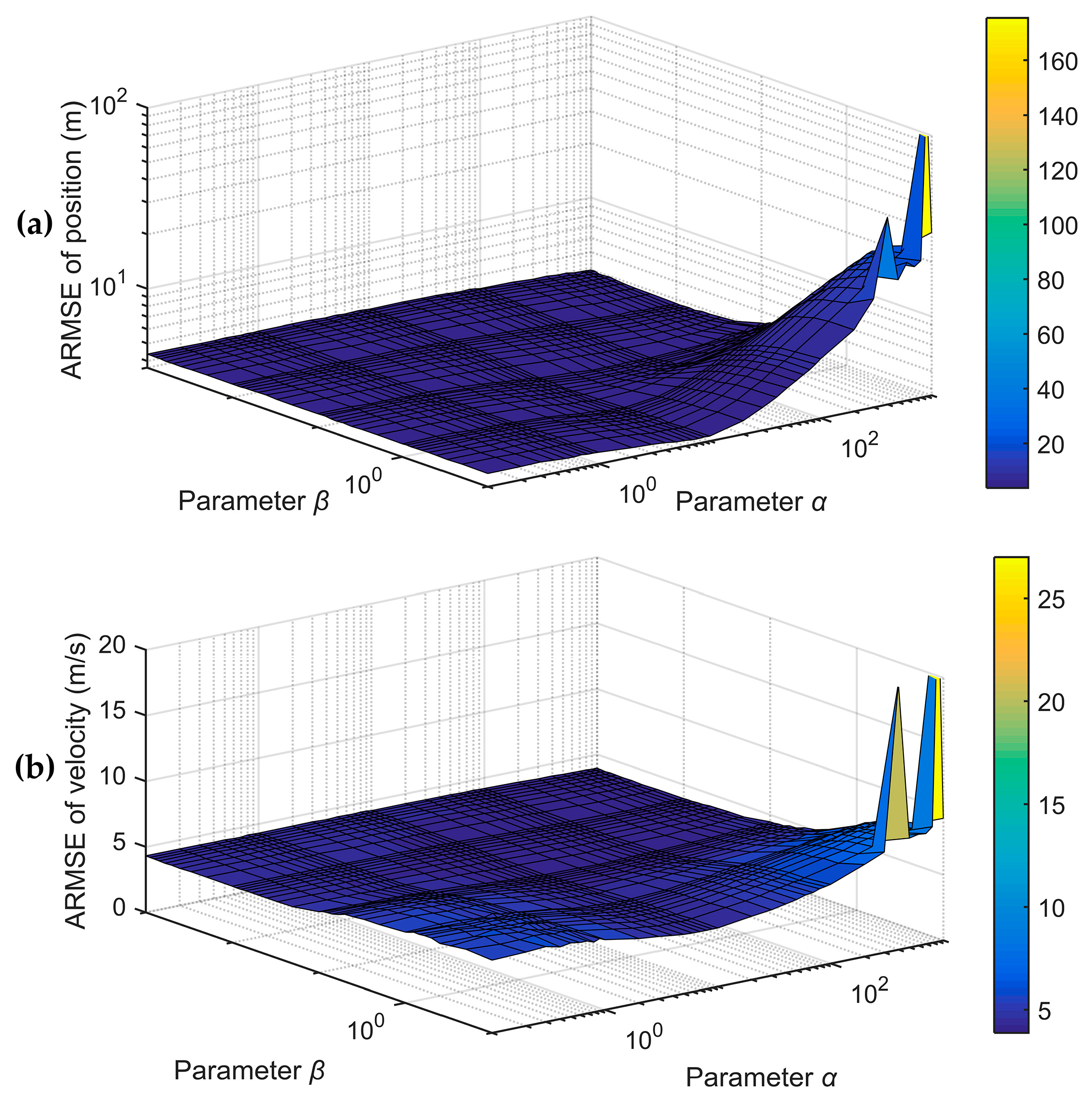
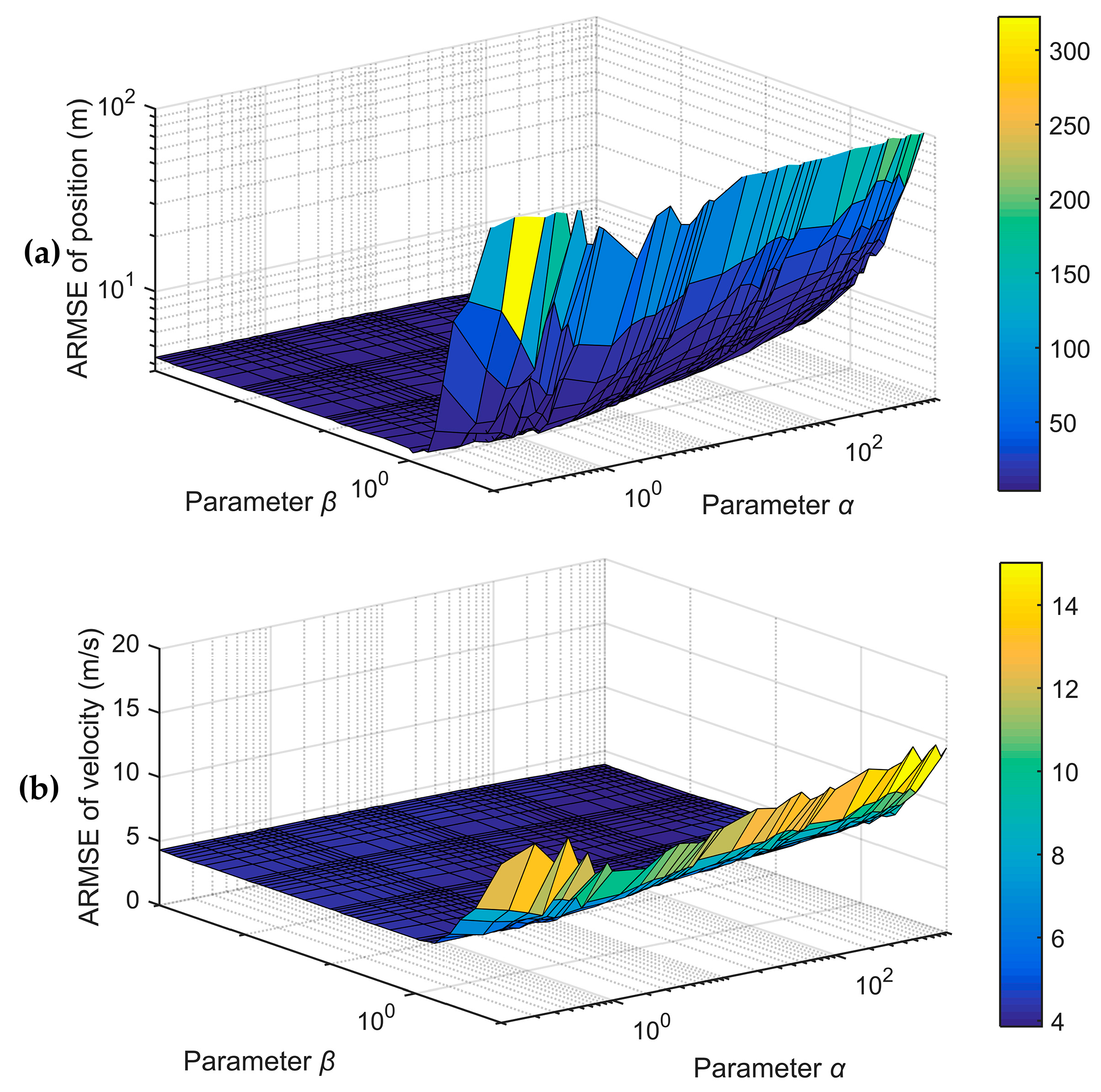
4.2. Robustness Analysis for PNCM and MNCM Initial Value Settings
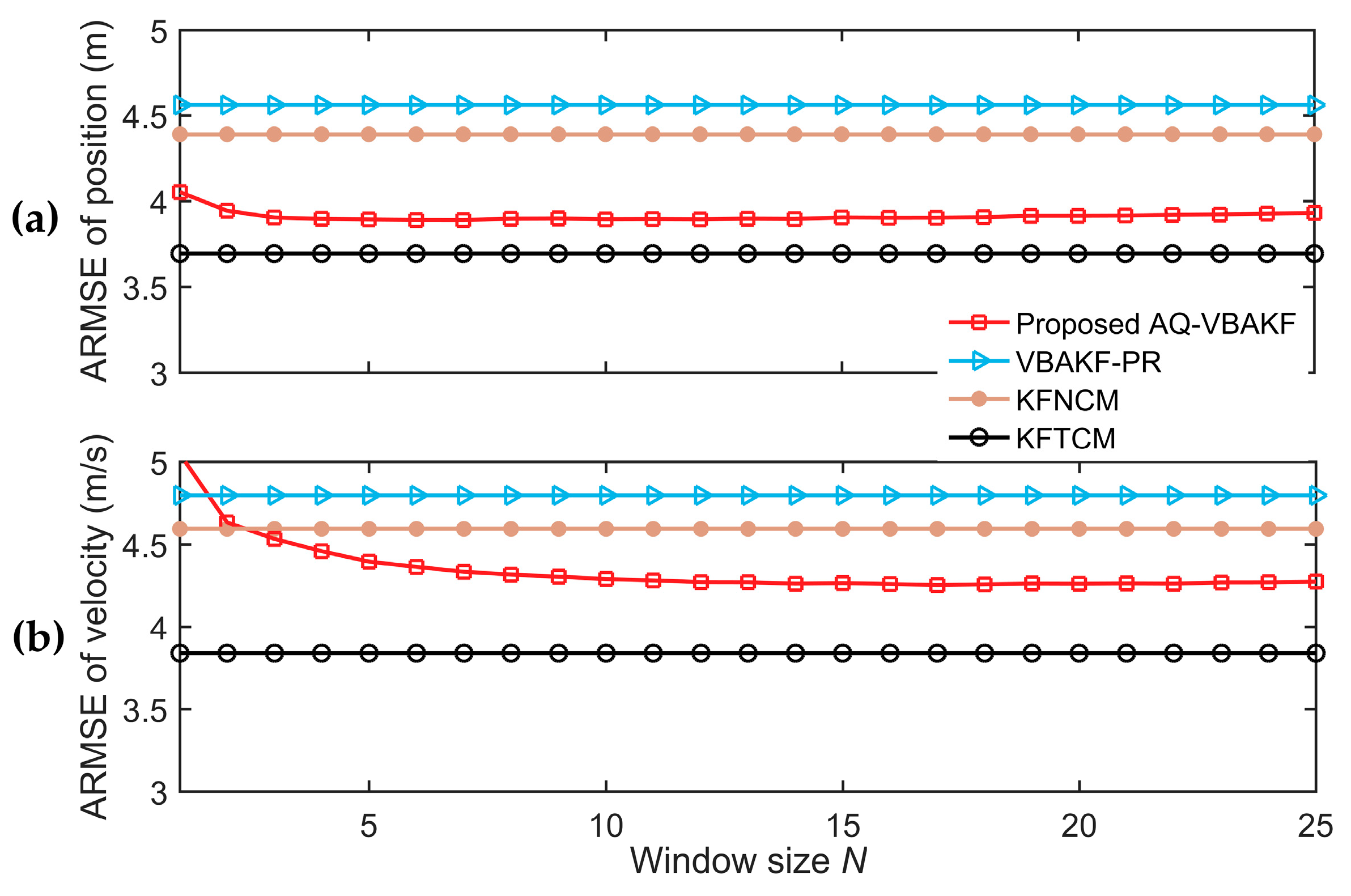
4.3. Analysis of Window Size Setting
4.4. Computational Efficiency Comparison
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Yuan, H.; Song, X. A Modified EKF for Vehicle State Estimation with Partial Missing Measurements. IEEE Signal Process. Lett. 2022, 29, 1594–1598. [Google Scholar] [CrossRef]
- Qiang, X.; Xue, R.; Zhu, Y. Two-Dimensional Monte Carlo Filter for a Non-Gaussian Environment. Electronics 2021, 10, 1385. [Google Scholar] [CrossRef]
- Yuan, T.; Zhao, R. LQR-MPC-Based Trajectory-Tracking Controller of Autonomous Vehicle Subject to Coupling Effects and Driving State Uncertainties. Sensors 2022, 22, 5556. [Google Scholar] [CrossRef] [PubMed]
- Cao, J.; Song, C.; Peng, S.; Song, S.; Zhang, X.; Xiao, F. Trajectory Tracking Control Algorithm for Autonomous Vehicle Considering Cornering Characteristics. IEEE Access 2020, 8, 59470–59484. [Google Scholar] [CrossRef]
- López-Salcedo, J.A.; Peral-Rosado, J.A.; Seco-Granados, G. Survey on robust carrier tracking techniques. IEEE Commun. Surv. Tuts. 2014, 16, 670–688. [Google Scholar] [CrossRef]
- Xie, F.; Liang, G.; Chien, Y.-R. Highly Robust Adaptive Sliding Mode Trajectory Tracking Control of Autonomous Vehicles. Sensors 2023, 23, 3454. [Google Scholar] [CrossRef]
- Li, X.; Bar-Shalom, Y. A recursive multiple model approach to noise identification. IEEE Trans. Aerosp. Electron. Syst. 1994, 30, 671–684. [Google Scholar] [CrossRef]
- Jiang, B.; Sheng, W.; Zhang, R.; Han, Y.; Ma, X. Range tracking method based on adaptive “current” statistical model with velocity prediction. Signal Process. 2017, 131, 261–270. [Google Scholar] [CrossRef]
- Zha, F.; Guo, S.; Li, F. An improved nonlinear filter based on adaptive fading factor applied in alignment of SINS. Optik 2019, 184, 165–176. [Google Scholar] [CrossRef]
- Agamennoni, G.; Nieto, J.; Nebot, E.M. Approximate inference in state-space models with heavy-tailed noise. IEEE Trans. Signal Process. 2012, 60, 5024–5037. [Google Scholar] [CrossRef]
- Hou, B.; Wang, J.; He, Z.; Qin, Y.; Zhou, H.; Wang, D.; Li, D. Novel interacting multiple model filter for uncertain target tracking systems based on weighted Kullback–Leibler divergence. J. Frankl. Inst. 2020, 357, 13041–13084. [Google Scholar] [CrossRef]
- Sarkka, S.; Nummenmaa, A. Recursive noise adaptive Kalman filtering by variational Bayesian approximations. IEEE Trans. Automat. Control 2009, 54, 596–600. [Google Scholar] [CrossRef]
- Xu, D.; Wu, Z.; Huang, Y. A new adaptive Kalman filter with inaccurate noise statistics. Circuits Syst. Signal Process. 2019, 38, 4380–4404. [Google Scholar] [CrossRef]
- Huang, Y.; Zhang, Y.; Wu, Z.; Li, N.; Chambers, J. A novel adaptive Kalman filter with inaccurate process and measurement noise covariance matrices. IEEE Trans. Autom. Control 2018, 63, 594–601. [Google Scholar] [CrossRef]
- Ma, J.; Lan, H.; Wang, Z.; Wang, X.; Pan, Q.; Moran, B. Improved adaptive Kalman filter with unknown process noise covariance. In Proceedings of the 21st International Conference on Information Fusion, Cambridge, UK, 10–13 July 2018; pp. 2054–2058. [Google Scholar]
- Xu, H.; Duan, K.; Yuan, H.; Xie, W.; Wang, Y. Black box variational inference to adaptive Kalman filter with unknown process noise covariance matrix. Signal Process. 2020, 169, 107413. [Google Scholar] [CrossRef]
- Huang, Y.; Zhu, F.; Jia, G.; Zhang, Y. A slide window variational adaptive Kalman filter. IEEE Trans. Circuits Syst. II Exp. Briefs 2020, 67, 3552–3556. [Google Scholar] [CrossRef]
- Brown, R.G.; Hwang, P.Y.C. Introduction to Random Signals and Applied Kalman Filtering, 4th ed.; John Wiley & Sons: Hoboken, NJ, USA, 2012; pp. 143–148. [Google Scholar]
- Sarkka, S. Bayesian Filtering and Smoothing; Cambridge University Press: Cambridge, UK, 2013; pp. 56–62. [Google Scholar]
- Tzikas, D.; Likas, A.; Galatsanos, N. The variational approximation for Bayesian inference. IEEE Signal Process. Mag. 2008, 25, 131–146. [Google Scholar] [CrossRef]
- Wang, G.; Wang, X.; Zhang, Y. Variational Bayesian IMM-Filter for JMSs With Unknown Noise Covariances. IEEE Trans. Aerosp. Electron. Syst. 2020, 56, 1652–1661. [Google Scholar] [CrossRef]
- Chen, X.; Cao, L.; Cao, P.; Xiao, B. A higher-order robust correlation Kalman filter for satellite attitude estimation. ISA Trans. 2022, 124, 326–337. [Google Scholar] [CrossRef]
- Fang, J.; Yang, S. Study on innovation adaptive EKF for in-flight alignment of airborne POS. IEEE Trans. Instrum. Meas. 2011, 60, 1378–1388. [Google Scholar]
- Pan, C.; Gao, J.; Li, Z.; Qian, N.; Li, F. Multiple fading factors-based strong tracking variational Bayesian adaptive Kalman filter. Measurement 2021, 176, 109139. [Google Scholar] [CrossRef]
- Gao, W.; Li, J.; Zhou, G.; Li, Q. Adaptive Kalman Filtering with Recursive Noise Estimator for Integrated SINS/DVL Systems. J. Navig. 2015, 68, 142–161. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Algorithms | α | β | ξ | S | N | τ |
|---|---|---|---|---|---|---|
| KFNCM | 1 | 10 | - | - | - | - |
| AQKF | 1 | 10 | - | - | 5 | - |
| VBAKF | 1 | 10 | 0.99 | 15 | - | - |
| VBAKF-PR | 1 | 10 | 0.99 | 15 | - | 10 |
| Proposed AQ-VBAKF | 1 | 10 | 0.99 | 15 | 5 | - |
| Algorithms | Computational Time (s) |
|---|---|
| KF | 37.7627 |
| AQKF | 45.0514 |
| VBAKF | 172.4772 |
| VBAKF-PR | 356.0744 |
| Proposed AQ-VBAKF | 188.0822 |
| Steps | Floating-Point Operations |
|---|---|
| 1 | |
| 2 | |
| 3 | |
| 4, 5, 6 | |
| 7 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Cheng, Y.; Zhang, S.; Wang, X.; Wang, H. Self-Tuning Process Noise in Variational Bayesian Adaptive Kalman Filter for Target Tracking. Electronics 2023, 12, 3887. https://doi.org/10.3390/electronics12183887
Cheng Y, Zhang S, Wang X, Wang H. Self-Tuning Process Noise in Variational Bayesian Adaptive Kalman Filter for Target Tracking. Electronics. 2023; 12(18):3887. https://doi.org/10.3390/electronics12183887
Chicago/Turabian StyleCheng, Yan, Shengkang Zhang, Xueyun Wang, and Haifeng Wang. 2023. "Self-Tuning Process Noise in Variational Bayesian Adaptive Kalman Filter for Target Tracking" Electronics 12, no. 18: 3887. https://doi.org/10.3390/electronics12183887
APA StyleCheng, Y., Zhang, S., Wang, X., & Wang, H. (2023). Self-Tuning Process Noise in Variational Bayesian Adaptive Kalman Filter for Target Tracking. Electronics, 12(18), 3887. https://doi.org/10.3390/electronics12183887