
Validation of a Biomechanical Injury and Disease Assessment Platform Applying an Inertial-Based Biosensor and Axis Vector Computation

 , ,
, ,  and
and {kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Materials and Methods
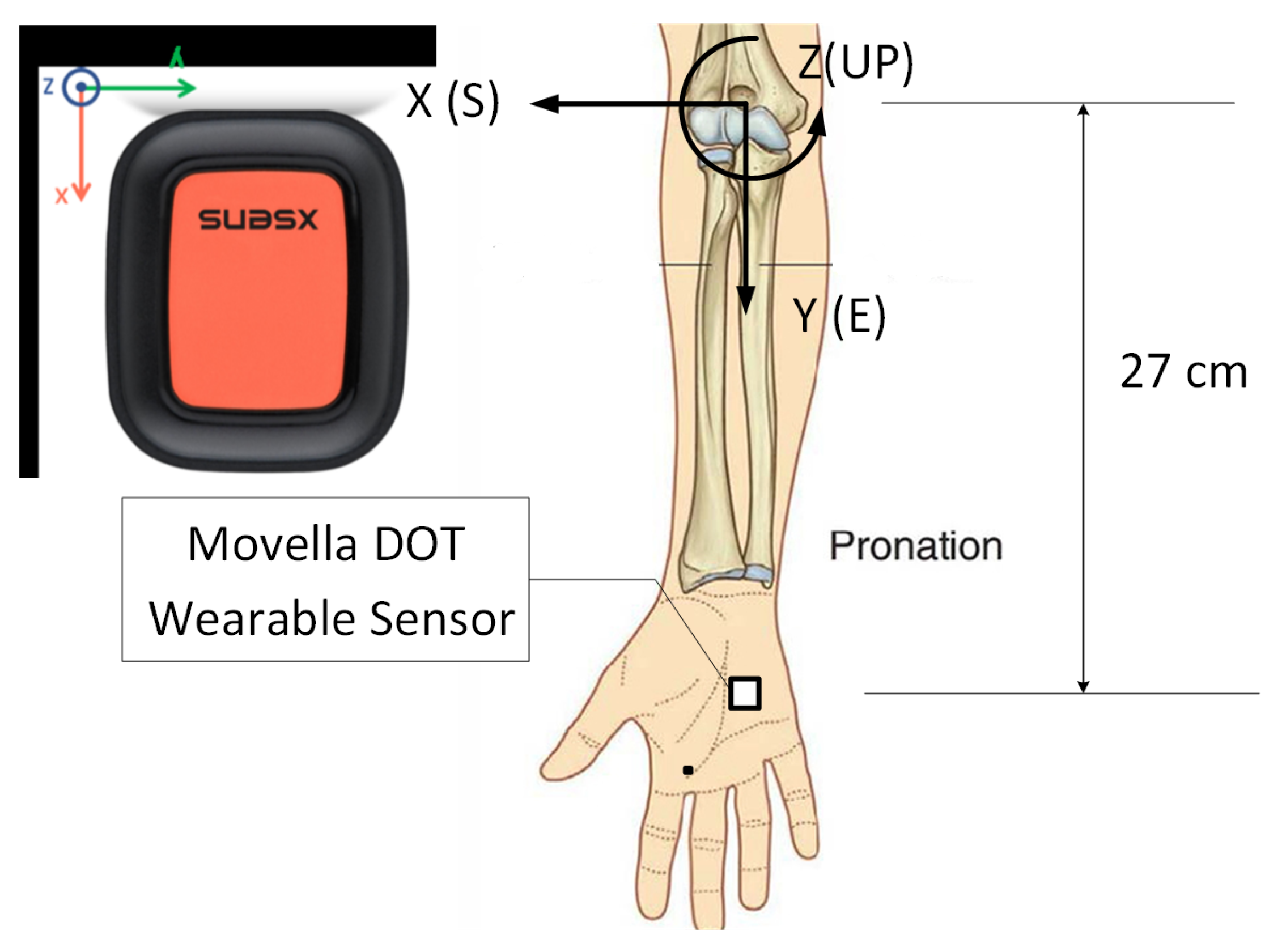
2.1. Inertial Measurement Unit Device and Model Foundation
- X positive to the East (E).
- Y positive to the North (N).
- Z positive when pointing Up (U)
2.2. Inverse Kinematic Solutions Using Quaternions
2.3. Biomechanical Orientation Tracking with Quaternions
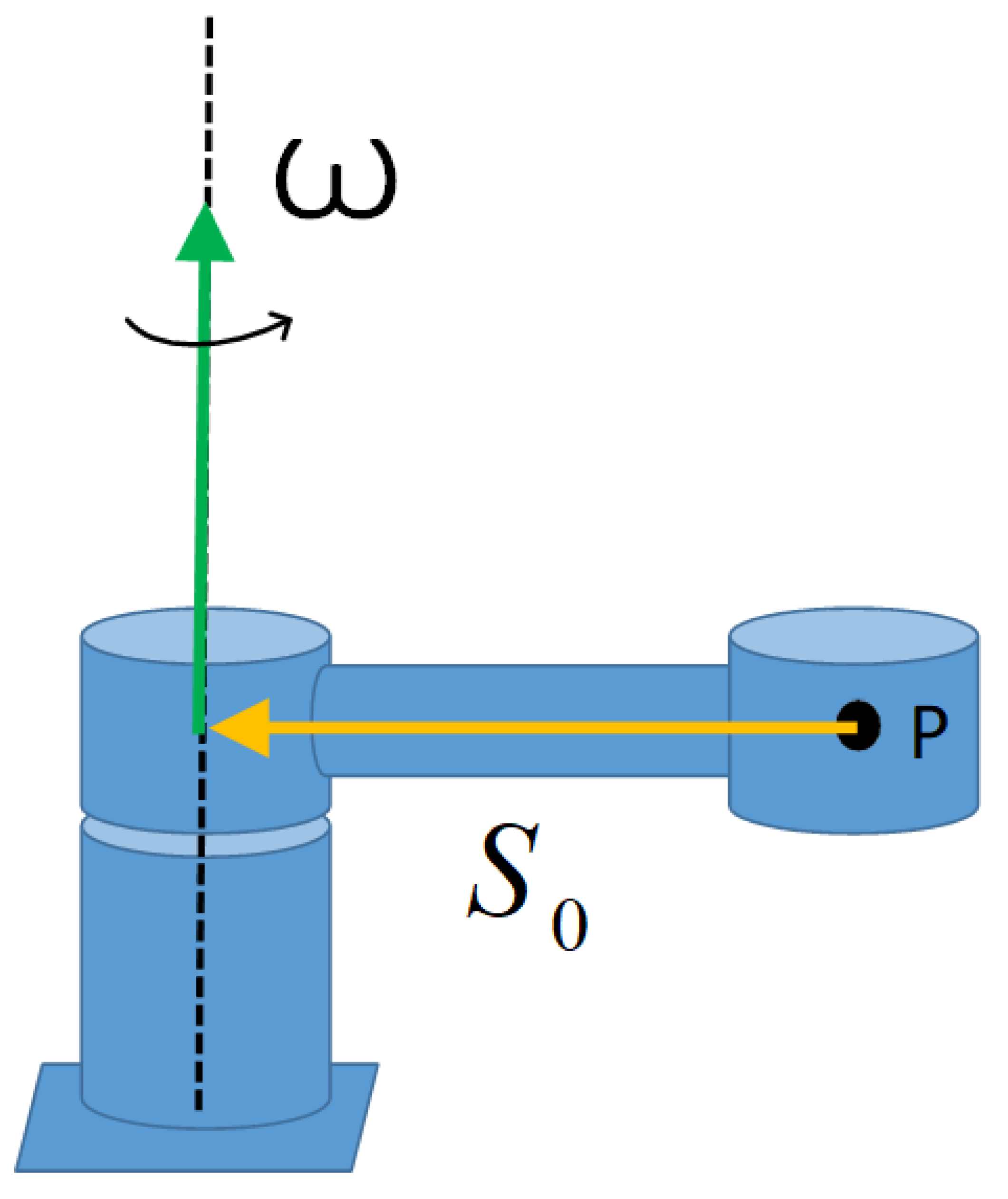
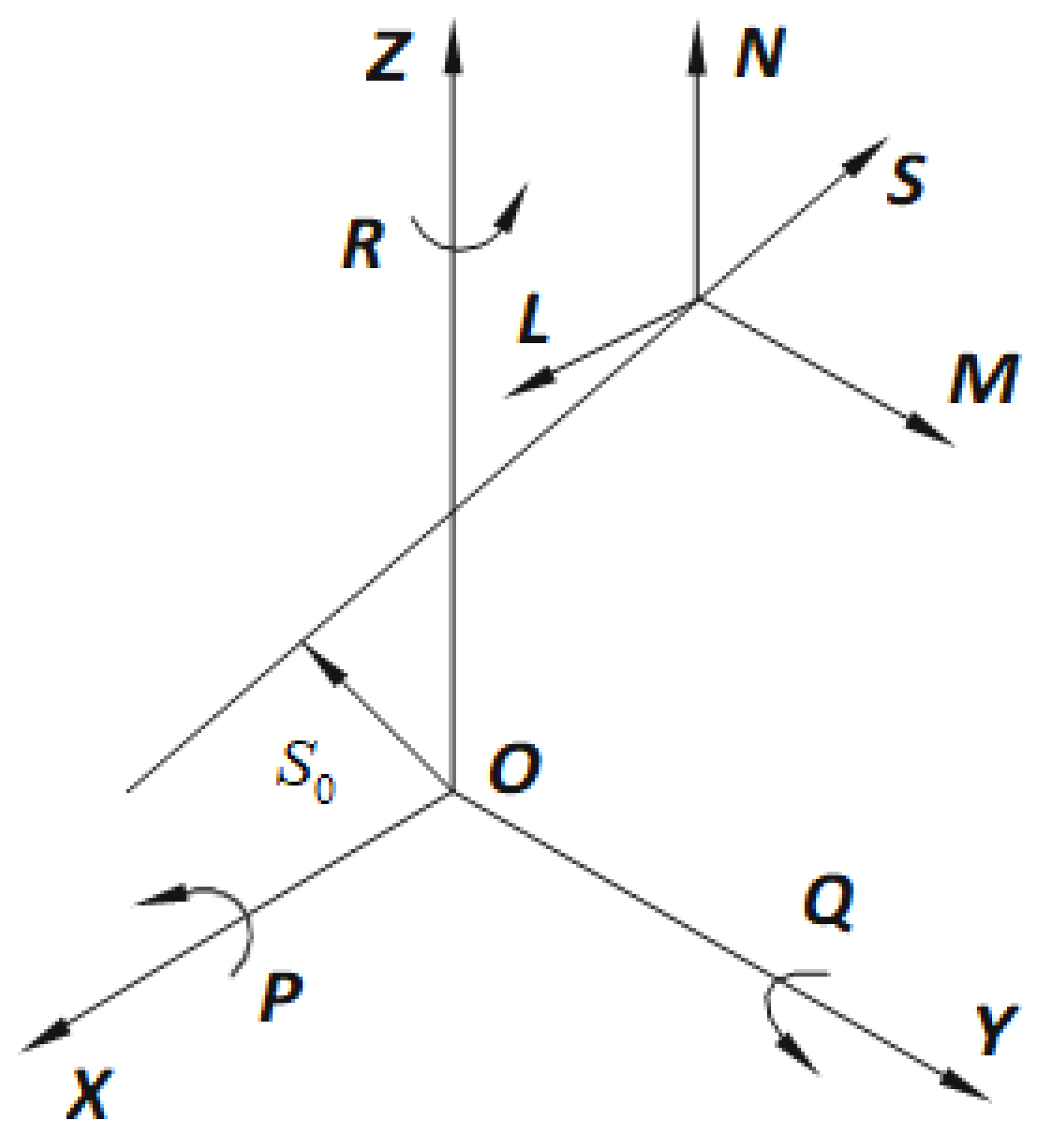
2.4. Instantaneous Axis Angle Origin Location Algorithm
3. Results
4. Discussion
- Global Description: Axis-angle representations allow for a global description of rigid body motion without suffering from singularities due to local coordinates. Unlike traditional Euler angles, which can result in singularities and ambiguities, axis-angle representations provide a more robust and accurate representation of limb kinematics.
- Geometric Description: Axis-angle representations provide a geometric description of rigid motion, simplifying biomechanical analysis and facilitating the understanding of kinesthesis (the feeling of movement) in skeletal and muscle structures. This geometric description is useful for applications such as computer-aided graphics, vision, and virtual reality.
- Quaternion Operations: Axis-angle representations can be easily converted to quaternion representations, which have well-defined operations for vector addition, multiplication, and interpolation. Quaternions offer a more efficient and accurate way to represent rotations compared to other methods.
- Simplified Biomechanics Analysis: Axis-angle representations simplify the analysis of joint biomechanics by providing a clear and intuitive representation of joint function and ligament health. They can be used to study the instantaneous axis of rotation, which plays a crucial role in joint functionality and overall locomotion perception and motor control.
Author Contributions
Funding
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Lapresa, M.; Tamantini, C.; di Luzio, F.S.; Ferlazzo, M.; Sorrenti, G.; Corpina, F.; Zollo, L. Validation of Magneto-Inertial Measurement Units for Upper-Limb Motion Analysis Through an Anthropomorphic Robot. IEEE Sens. J. 2022, 22, 16920–16928. [Google Scholar] [CrossRef]
- Białecka, M.; Gruszczyński, K.; Cisowski, P.; Kaszyński, J.; Baka, C.; Lubiatowski, P. Shoulder Range of Motion Measurement Using Inertial Measurement Unit—Validation with a Robot Arm. Sensors 2023, 23, 5364. [Google Scholar] [CrossRef] [PubMed]
- Pérez-Sanpablo, A.I.; Quinzaños-Fresnedo, J.; Romero-Ixtla, M.; Aguirre-Güemez, A.V.; Rodríguez-Reyes, G.; Pérez-Zavala, R.; Barrera-Ortiz, A.; Quijano-González, Y. Validation of inertial measurement units for the assessment of trunk control in subjects with spinal cord injury. J. Spinal Cord. Med. 2023, 46, 154–163. [Google Scholar] [CrossRef] [PubMed]
- Riek, P.M.; Best, A.N.; Wu, A.R. Validation of inertial sensors to evaluate gait stability. Sensors 2023, 23, 1547. [Google Scholar] [CrossRef] [PubMed]
- Gu, C.; Lin, W.; He, X.; Zhang, L.; Zhang, M. IMU-based Mocap system for rehabilitation applications: A systematic review. Biomim. Intell. Robot. 2023, 3, 100097. [Google Scholar]
- González-Alonso, J.; Oviedo-Pastor, D.; Aguado, H.J.; Díaz-Pernas, F.J.; González-Ortega, D.; Martínez-Zarzuela, M. Custom IMU-based wearable system for robust 2.4 GHz wireless human body parts orientation tracking and 3D movement visualization on an avatar. Sensors 2021, 21, 6642. [Google Scholar] [CrossRef] [PubMed]
- D’Amore, N.; Ciarleglio, C.; Akin, D.L. Imu-based manipulator kinematic identification. In Proceedings of the 2015 IEEE International Conference on Robotics and Automation (ICRA), Seattle, WA, USA, 26–30 May 2015; pp. 1437–1441. [Google Scholar]
- Kim, W.; Veloso, A.P.; Araújo, D.; Vleck, V.; João, F. An informational framework to predict reaction of constraints using a reciprocally connected knee model. Comput. Methods Biomech. Biomed. Eng. 2013, 18, 78–89. [Google Scholar] [CrossRef] [PubMed]
- Kim, W.; Vela, E.A. Freedom in Osteoarthritis of the Knee. Appl. Sci. 2022, 12, 839. [Google Scholar] [CrossRef]
- Kim, W.; Araujo, D.; Kohles, S.S.; Kim, S.-G.; Alvarez Sanchez, H.H. Affordance-Based Surgical Design Methods Considering Biomechanical Artifacts. Ecol. Psychol. 2020, 33, 57–71. [Google Scholar] [CrossRef] [PubMed]
- Fregly, B.; D’Lima, D.; Besier, T.; Delp, S.; Lloyd, D.; Banks, S.; Pandy, M. Grand challenge competition to predict in vivo knee loads. J. Orthop. Res. 2011, 30, 503–513. [Google Scholar] [CrossRef]
- Ancillao, A.; Vochten, M.; Aertbeliën, E.; Decré, W.; De Schutter, J. Estimating the instantaneous screw axis and the screw axis invariant descriptor of motion by means of inertial sensors: An experimental study with a mechanical hinge joint and comparison to the optoelectronic system. Sensors 2019, 20, 49. [Google Scholar] [CrossRef]
- Kim, W. The Knee Proprioception as Patient-Dependent Outcome Measures within Surgical and Non-Surgical Interventions. In Proprioception; IntechOpen: London, UK, 2020. [Google Scholar]
- Schumacher, A. Integration of a Gps Aided Strapdown Inertial Navigation System for Land Vehicles. Master’s Thesis, KTH Electrical Engineering, Stockholm, Sweden, 2006. [Google Scholar]
- Li, Y.; Liu, C.; Zou, H.; Che, L.; Sun, P.; Yan, J.; Liu, W.; Xu, Z.; Yang, W.; Dong, L. Integrated wearable smart sensor system for real-time multi-parameter respiration health monitoring. Cell Rep. Phys. Sci. 2023, 4, 101191. [Google Scholar] [CrossRef]
- Trujullo, D.M.; Busby, H.R. Practical Inverse Anlaysis in Engineering; CRC Press: Boca Raton, FL, USA, 1997. [Google Scholar]
- Ancillao, A.; Vochten, M.; Verduyn, A.; De Schutter, J.; Aertbeliën, E. An optimal method for calculating an average screw axis for a joint, with improved sensitivity to noise and providing an analysis of the dispersion of the instantaneous axes. PLoS ONE 2022, 17, e0275218. [Google Scholar]
- Kim, W.; Tretheway, D.C.; Kohles, S.S. An inverse method for predicting tissue-level mechanics from cellular mechanical input. J. Biomech. 2009, 42, 395–399. [Google Scholar] [CrossRef] [PubMed]
- Kim, W.; Kim, Y.-H.; Veloso, A.P.; Kohles, S.S. Tracking knee joint functional axes through Tikhonov filtering and Plűcker coordinates. J. Nov. Physiother. 2013, 4, 11732. [Google Scholar] [CrossRef]
- Tincknell, M. Quaternion. MATLAB Central File Exchange. 2023. Available online: https://www.mathworks.com/matlabcentral/fileexchange/33341-quaternion (accessed on 29 April 2023).
- Kuipers, J.B. Quaternions and Rotation Sequences; Princeton University Press: Princeton, NJ, USA, 1999. [Google Scholar]
- Gibson, J.J. The Ecological Approach to Visual Perception; Houghton Mifflin: Boston, MA, USA, 1979. [Google Scholar]
- Ball, R. A Treatise on the Theory of Screws; Cambridge University Press: Cambridge, UK, 1900. [Google Scholar]
- Kim, W.; Veloso, A.P.; Vleck, V.E.; Andrade, C.; Kohles, S.S. The stationary configuration of the knee. J. Am. Podiatr. Med. Assoc. 2013, 103, 126–135. [Google Scholar]
- Den Hartog, D.; van der Krogt, M.M.; van der Burg, S.; Aleo, I.; Gijsbers, J.; Bonouvrié, L.A.; Harlaar, J.; Buizer, A.I.; Haberfehlner, H. Home-based measurements of dystonia in cerebral palsy using smartphone-coupled inertial sensor technology and machine learning: A proof-of-concept study. Sensors 2022, 22, 4386. [Google Scholar] [CrossRef] [PubMed]
- Mittag, C.; Waldheim, V.; Krause, A.; Seel, T. Using a single inertial sensor to control exergames for children with cerebral palsy. In Current Directions in Biomedical Engineering; De Gruyter: Berlin, Germany, 2022; pp. 431–434. [Google Scholar]
- Van Meulen, F.B.; van Beijnum, B.-J.F.; Buurke, J.H.; Veltink, P.H. Assessment of lower arm movements using one inertial sensor. In Proceedings of the 2017 International Conference on Rehabilitation Robotics (ICORR), London, UK, 17–20 July 2017; IEEE: Piscataway, NJ, USA; pp. 1407–1412. [Google Scholar]
- Mendoza, M.J.; Gollob, S.D.; Lavado, D.; Koo, B.H.B.; Cruz, S.; Roche, E.T.; Vela, E.A. A Vacuum-Powered Artificial Muscle Designed for Infant Rehabilitation. Micromachines 2021, 12, 971. [Google Scholar] [CrossRef] [PubMed]
- Mannel, H.; Marin, F.; Claes, L.; Durselen, L. Establishment of a knee-joint coordinate system from helical axes analysis-a kinematic approach without anatomical referencing. IEEE Trans. Biomed. Eng. 2004, 51, 1341–1347. [Google Scholar] [CrossRef]
- Kim, W.; Espanha, M.; Veloso, A.; Araújo, D.; João, F. An Informational Algorithm as the Basis for Perception-Action Control of the Instantaneous Axes of the Knee. J. Nov. Physiother. 2013, 3, 2. [Google Scholar] [CrossRef]
- Kim, W.; Veloso, A.; Araújo, D.; Machado, M.; Vleck, V.; Aguiar, L.; Cabral, S.; Vieira, F. Haptic perception-action coupling manifold of effective golf swing. Int. J. Golf Sci. 2013, 2, 10–32. [Google Scholar]
- Kim, W.; Vela, E.A. A Tensional Network in the Knee. Biomed. J. Sci. Tech. Res. 2021, 40, 32073–32078. [Google Scholar]
- Kohles, S.S.; Gregorczyk, K.N.; Phillips, T.C.; Brody, L.T.; Orwin, I.F.; Vanderby, R., Jr. Concentric and eccentric shoulder rehabilitation biomechanics. Proc. Inst. Mech. Eng. H 2007, 221, 237–249. [Google Scholar] [PubMed]
- Kohles, S.S.; McClaren, J.W. A stochastic model validated with human test data causally associating target vehicle Delta V, occupant cervicocranial biomechanics, and injury during rear-impact crashes. J. Forensic Leg. Med. 2022, 91, 102431. [Google Scholar] [PubMed]




Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kim, W.; Vela, E.A.; Kohles, S.S.; Huayamave, V.; Gonzalez, O. Validation of a Biomechanical Injury and Disease Assessment Platform Applying an Inertial-Based Biosensor and Axis Vector Computation. Electronics 2023, 12, 3694. https://doi.org/10.3390/electronics12173694
Kim W, Vela EA, Kohles SS, Huayamave V, Gonzalez O. Validation of a Biomechanical Injury and Disease Assessment Platform Applying an Inertial-Based Biosensor and Axis Vector Computation. Electronics. 2023; 12(17):3694. https://doi.org/10.3390/electronics12173694
Chicago/Turabian StyleKim, Wangdo, Emir A. Vela, Sean S. Kohles, Victor Huayamave, and Oscar Gonzalez. 2023. "Validation of a Biomechanical Injury and Disease Assessment Platform Applying an Inertial-Based Biosensor and Axis Vector Computation" Electronics 12, no. 17: 3694. https://doi.org/10.3390/electronics12173694
APA StyleKim, W., Vela, E. A., Kohles, S. S., Huayamave, V., & Gonzalez, O. (2023). Validation of a Biomechanical Injury and Disease Assessment Platform Applying an Inertial-Based Biosensor and Axis Vector Computation. Electronics, 12(17), 3694. https://doi.org/10.3390/electronics12173694