1. Introduction
Drones are a type of unmanned aircraft achieving significant attention in recent years for both civilian and commercial applications, due to their hovering capability, flight capacity, ease of deployment, and low operation and maintenance costs. Drones or Unmanned Aerial Vehicles (UAVs) have many use cases, since they have been used in a wide range of applications, such as disaster rescue operations, smart agriculture, emergency medical services, and aerial photography [
1]. In addition, recent advances in drone technology have made it possible to widely deploy drones for wireless communication. This allows drones to be used as aerial base stations to support the connection of existing terrestrial wireless networks, such as cell phones and broadband networks.
Unlike conventional ground base stations, aerial base stations have the advantage that they can adjust their flight altitude and avoid obstacles to increase the possibility of connecting with ground users by establishing Line-of-Sight (LoS) communications. The LoS connection can improve coverage and data rate performance. In addition, it is possible to construct the network flexibly because it can be freely deployed in the air. On the other hand, wireless data communication has exploded in the last few years due to the rapid spread of the Internet of Things (IoT) and their various new applications. However, conventional wireless drone networks operate in the microwave frequency band below 6 GHz, where the spectrum resources are already heavily utilized. Despite the rapid increase in the demand for data capacity, there is a growing concern that the available spectrum is limited. Several techniques have been proposed to improve the network capacity and to achieve high frequency efficiency in future cellular systems. For example, Multiple-Input and Multiple-Output (MIMO), Non-Orthogonal Multiple Access (NOMA), and cooperative relaying. However, these technological advances do not provide a solution to solve the spectrum scarcity problem. Therefore, a solution may be to expand using higher frequencies in the radio spectrum. In this paper, communication links between user and drone, and between drone and drone are considered using millimeter-wave communication. The expanding use of millimeter-wave frequencies can provide multiple gigabit data transmission rates by ensuring a wide range of available spectrum resources [
2]. Hence, millimeter-wave communication should be leveraged in 5G wireless communication systems that require very high data throughput, wide bandwidth, high communication speed, and low latency. In addition to the sufficient bandwidth, the short wavelength of millimeter-wave communication makes it possible to design physically small circuits and antennas. Moreover, it is easy to achieve sharper directivity by miniaturizing the antenna. On the other hand, millimeter-wave communications suffer from large free space attenuation. In addition to the expected application of drone to wireless networks, the possibility of transmitting multiple gigabits of data using 5G millimeter-wave communications has led to the idea of combining wireless network support by drone with millimeter-wave communications [
3].
In this paper, we propose a scenario for a disaster area where ground base stations are out of service. In fact, during the Great East Japan Earthquake in 2011, about 29,000 cell phone base stations and PHS (Personal Handy-phone System) base stations of five major companies, NTT docomo, KDDI, Softbank Mobile, EMOBILE, and WILLCOM were out of service [
4]. The first 72 h after a disaster occurs are considered the most critical, and it is necessary to deploy wireless networks quickly to restore communication connectivity in order to aid rescue teams in the disaster area. Establishing a wireless network using drones in the damaged area where ground base stations are malfunctioned is an effective and fast method to support different rescue operations at the disaster area. We assume that the drone networks are deployed into post-disaster areas in mild weather conditions, especially after thunderstorms had left.
Figure 1 shows the overall architecture [
5] of our disaster-resilient millimeter-wave drone networks. As aforementioned, UAV networks have several advantages because of their ability to place base stations in the sky. The first is that they can move regardless of the constraints on the ground. This allows for the rapid deployment of base stations when needed and allows for the optimal placement of base stations for a particular distribution of users. The other point is the ability to provide data from the sky. This reduces the probability of being blocked by buildings, etc., and increases the probability that the propagation path between the UAV and the user is in line-of-sight condition. These advantages make UAV networks attractive applications for many use cases, but in this study, we mainly consider disaster-stricken areas as our target use case. Moreover, for the selection of the types of UAVs, this study assumes the use of a multirotor UAV rather than a fixed-wing UAV for our temporary base stations. Unlike fixed-wing UAVs, multirotor UAVs have a higher degree of freedom of movement, enabling the optimization of not only the placement, but also the UAV’s trajectories [
6]. Our proposed system consists of two types of UAVs: access UAVs and backhaul UAVs. The backhaul UAV is responsible for relaying the traffic sent from the base station on the ground and other backhaul UAVs to other UAVs. If the distance between the access UAV and the neighboring base station is fixed, by using backhaul UAVs as relays in between base stations and access UAVs, the transmission distances between these links are effectively shortened. The shorter communication distance between UAVs alleviates the effects of distance attenuation and rain attenuation, which are problems in the millimeter-wave band. This allows for a longer communication distance between the access UAV and the ground base station, which can be used for various use cases. The access UAV provides the traffic sent from the backhaul UAV to the user on the ground. Since the access UAV provides data directly to the user, its placement has a significant impact on the data rate provided.
Our previous work in [
5] had been dealing with the optimization of the access UAVs’ placements and the corresponding coverages against varying user traffic distribution. The work found that owing to the moving freedom of UAVs, our optimal UAV placement can offer significant system throughput gain. For the fixed location of access UAVs, our work in [
7] revealed that the backhaul drones can construct optimal routes to offload traffic to the central macro base station, owing to the effect of multi-hop communications and multi-route multiplexing over backhaul drone networks. We also constructed a Proof-of-Concept system and partially demonstrated the effectiveness of our proposed system via outdoor experiment [
8].
For future deployment of our proposed system, we aim to develop our system at the 28 GHz band assigned for local 5G [
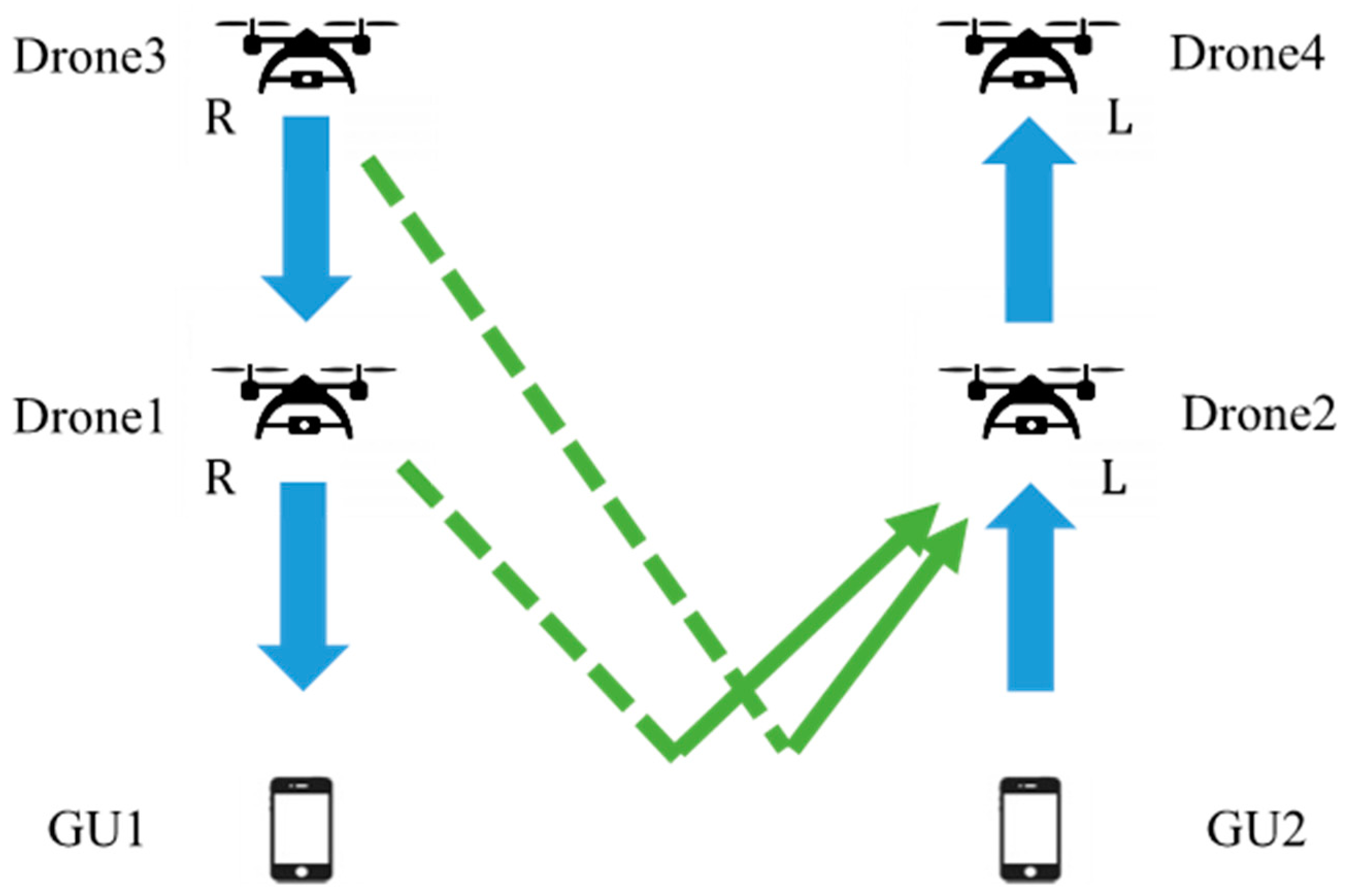
9], with a bandwidth of 100 MHz ready for use in outdoor environments. One of our current problems is that when multiple drones communicate with the user, the uplink (UL) that sends data from the user to the aerial base station and the downlink (DL) that sends data from the aerial base station to the user cause interference. Such scenarios are common in the asynchronous operation of the local 5G system assigned at the 28 GHz band in Japan [
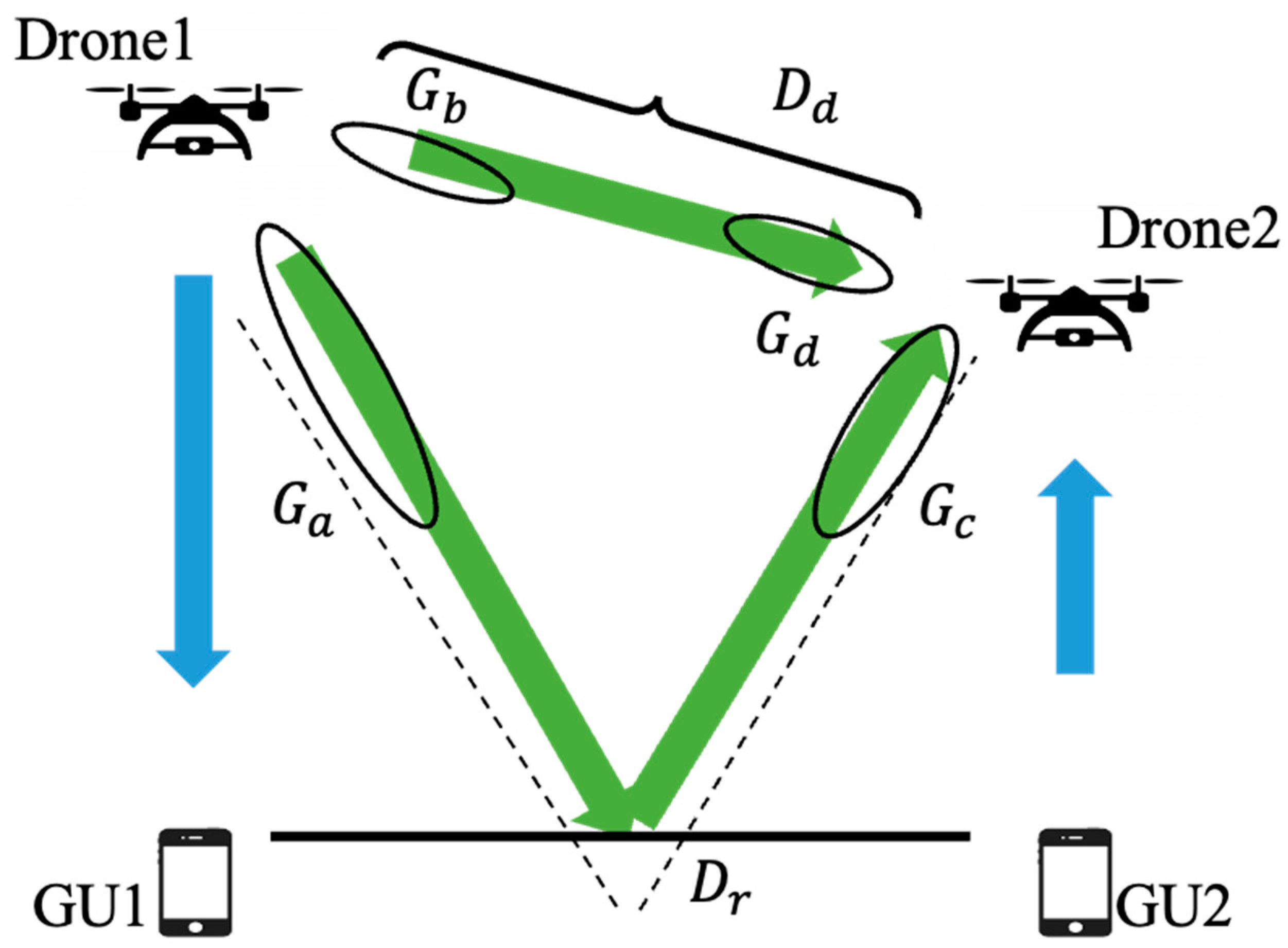
10]. In this paper, as opposed to the conventional system using linearly polarized antennas, we investigate the improvement of SIR by using the characteristics of circular polarization whose rotation direction changes before and after the ground reflection. For the propagation model, we apply the two-ray model to calculate the received power and SIR, and show the effectiveness of the proposed method. This paper extends from the authors’ previous work in [
11], where only a system of access drones communicating directly to ground users was investigated. In this paper, we thoroughly investigate the overall system under the existence of backhaul drones that cause more intra/inter-system interference. By the way, since comparison between the conventional microwave-band system and the proposed system employing millimeter-wave band is not the main focus of this paper, readers might refer to [
5] for the comparison of these two systems. Solutions for powering the aerial drones as discussed in [
12] are also out of this paper’s scope.
The rest of this paper is organized as follows. In
Section 2, we present the related work about our research and the overall architecture of our research. In
Section 3, we show the system model and design using different antenna polarization when there are only access drones and ground users.
Section 4 furthermore investigates the SIR performance of the system when there is the existence of backhaul drones. Finally, we conclude our work and discuss our future works in
Section 5.
2. Related Works
The overall architecture of this research is shown in
Figure 1. The roles of drones are assumed to be divided into the access-drones and the backhaul-drones to provide data to users. The access-drones communicate directly with the user, while the backhaul-drones act as a relay between the access-drones and the ground base station. By relaying the backhaul-drones, the communication distance between drones becomes shorter. This reduces the effect of distance attenuation and rainfall attenuation, which are concerns in millimeter-wave communication. On the other hand, since the access-drones provide data directly to users, it is important to know how to deploy these drones. If drones are efficiently deployed, it is expected to provide LoS communication to the ground users, which is important in millimeter-wave communications, and to expand the coverage with fewer base stations.
Authors in [
13] show the minimum transmit power required to have a certain coverage radius as a function of the altitude of the drones. At lower altitudes, the shadowing effect reduces the probability of LoS connection between the transmitter and the receiver, resulting in a decrease in the coverage radius. On the other hand, at high altitudes, the probability of LoS connection is high. However, due to the large distance between the transmitter and the receiver, the path loss increases, and as a result, the coverage performance decreases. In [
14], the optimal deployment of multiple drones equipped with directional antennas as aerial base stations was investigated. Based on the circle packing theory, an efficient placement method was proposed in which each drone can obtain the maximum coverage with the minimum transmission power. As a result, the optimal altitude and position of drones were determined based on the number of available drones, antenna gain, and beam-width. In [
5], a deployment method that combines the K-means method with the minimum envelope problem was considered to maximize the data rate that can be provided to users in DL. There have been many studies of deployment methods that give priority to DL connections, but few studies have been conducted in environments where DL and UL concurrently exist. In this paper, we propose a method to reduce the interference to UL caused by DL in the communication between adjacent concurrent UL/DL drone networks via the introduction of circularly polarized antennas, against the conventional system applying linearly polarized antennas.
5. Conclusions
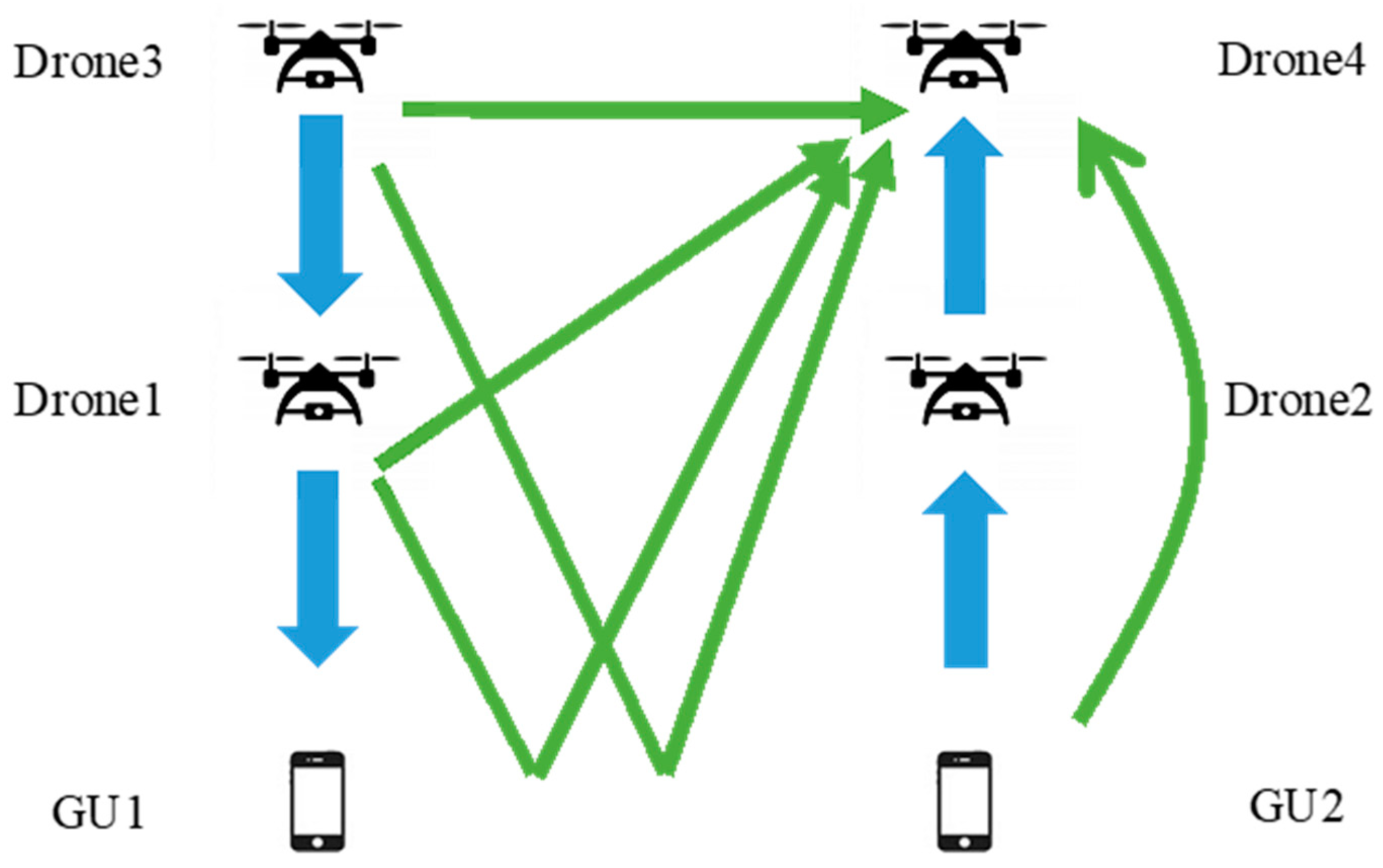
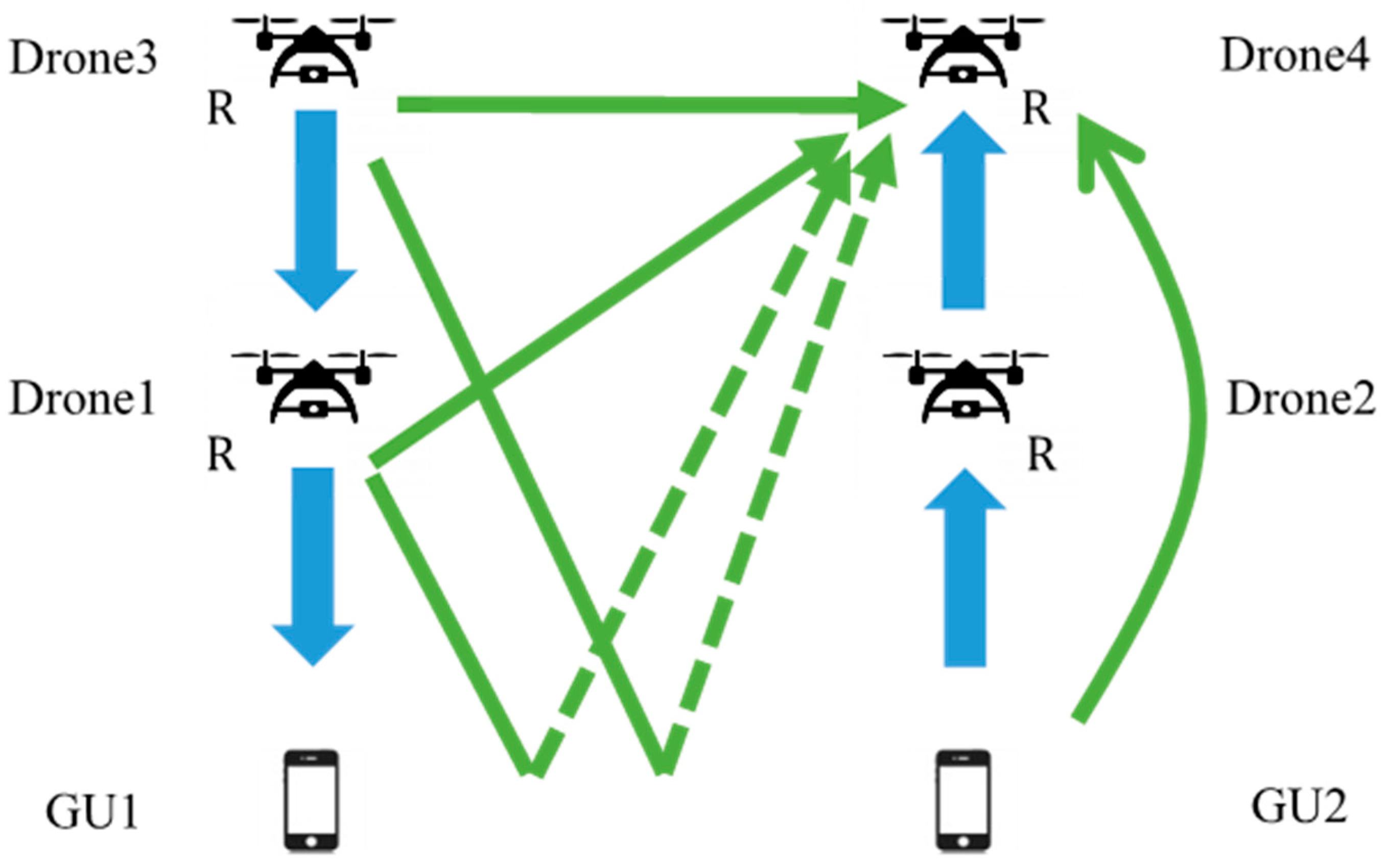
In this research, as a wireless network system for disaster areas using drones, we proposed a system that transmits data in the 28 GHz band with a bandwidth of 100 MHz used in local 5G. Asynchronous operation has been considered in response to the demand for increasing uplink data capacity, such as sending videos from smartphones. We attempted to reduce the intra/inter-system interference by properly introducing antennas of circular polarization against a conventional system employing linearly polarized antennas. In
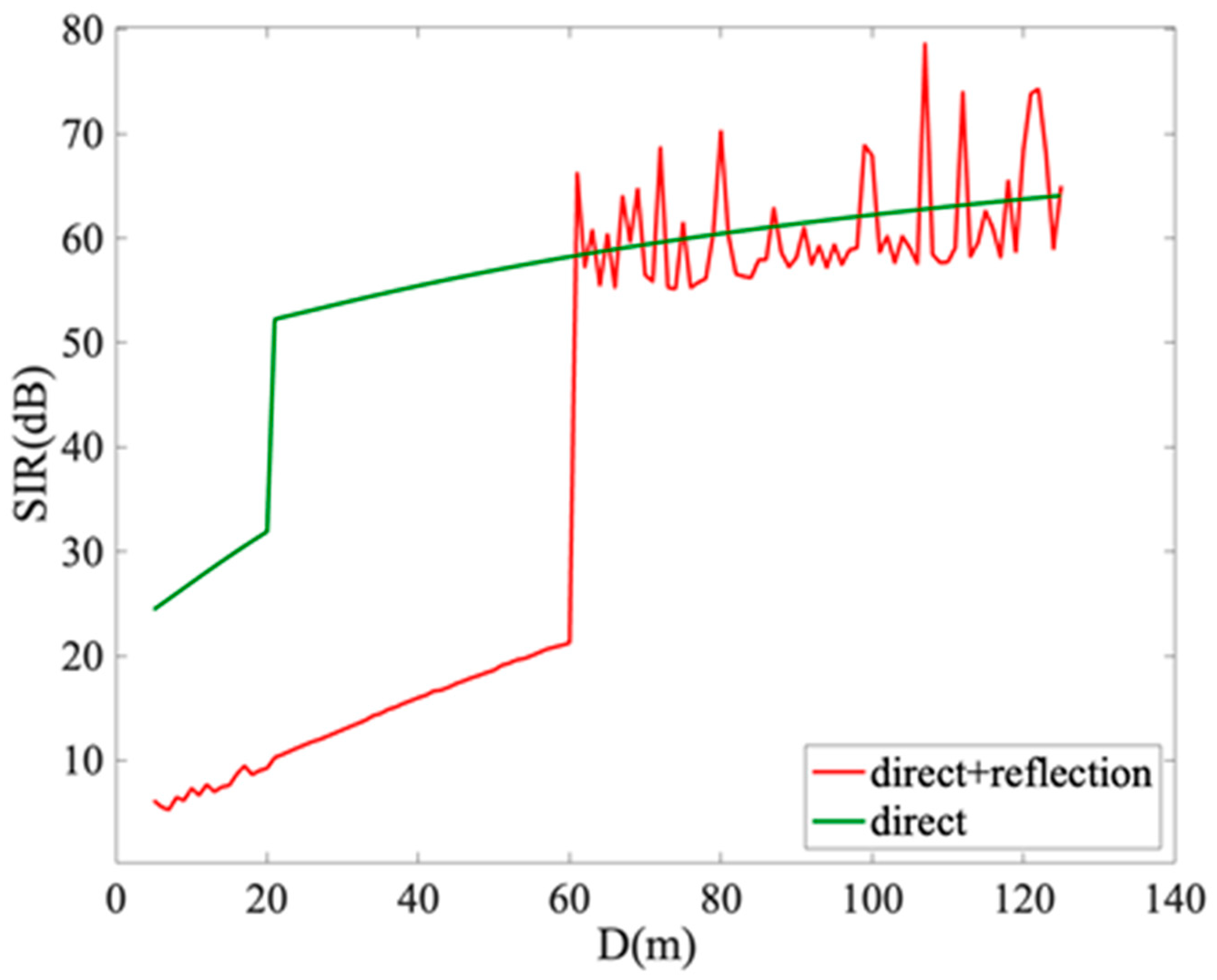
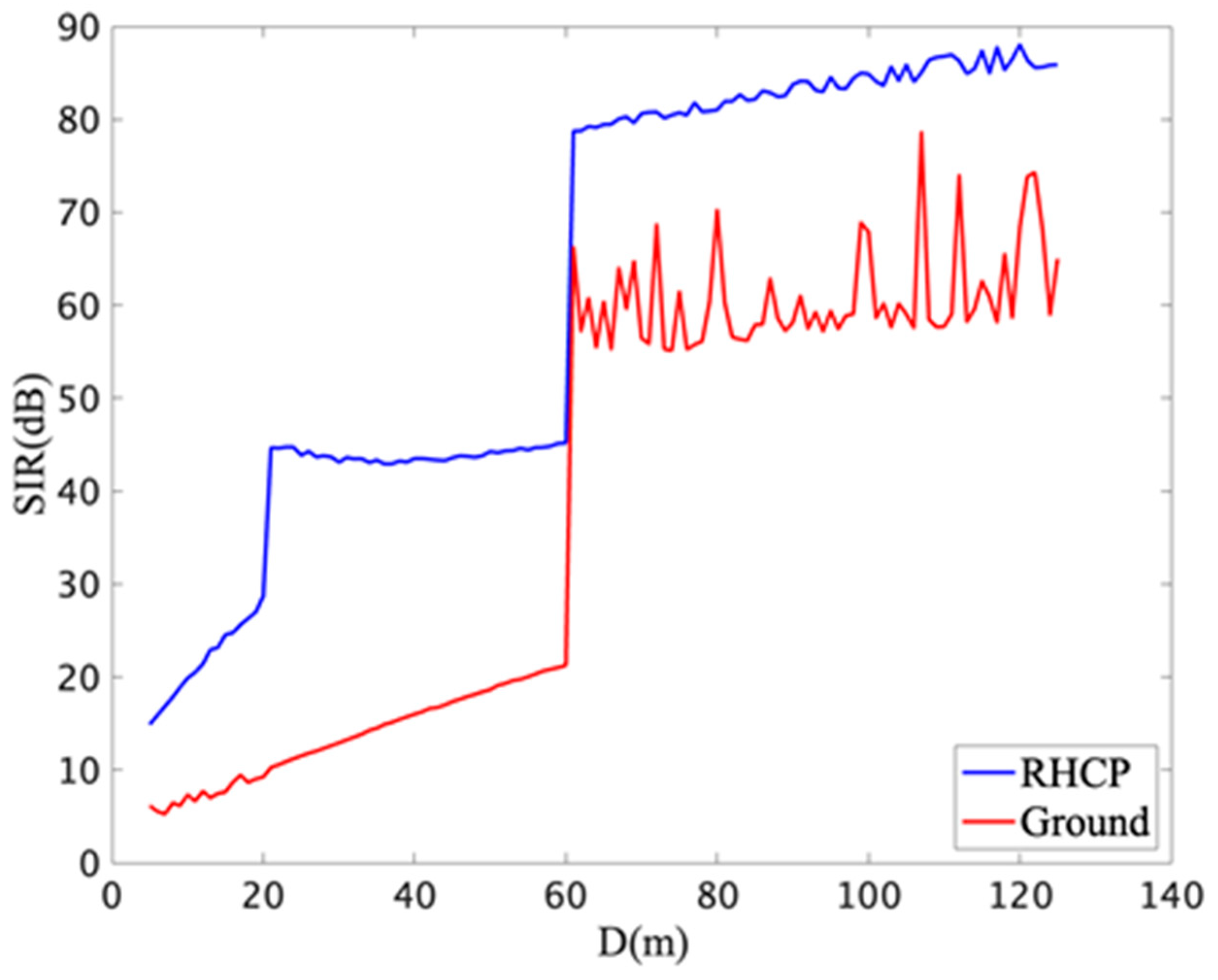
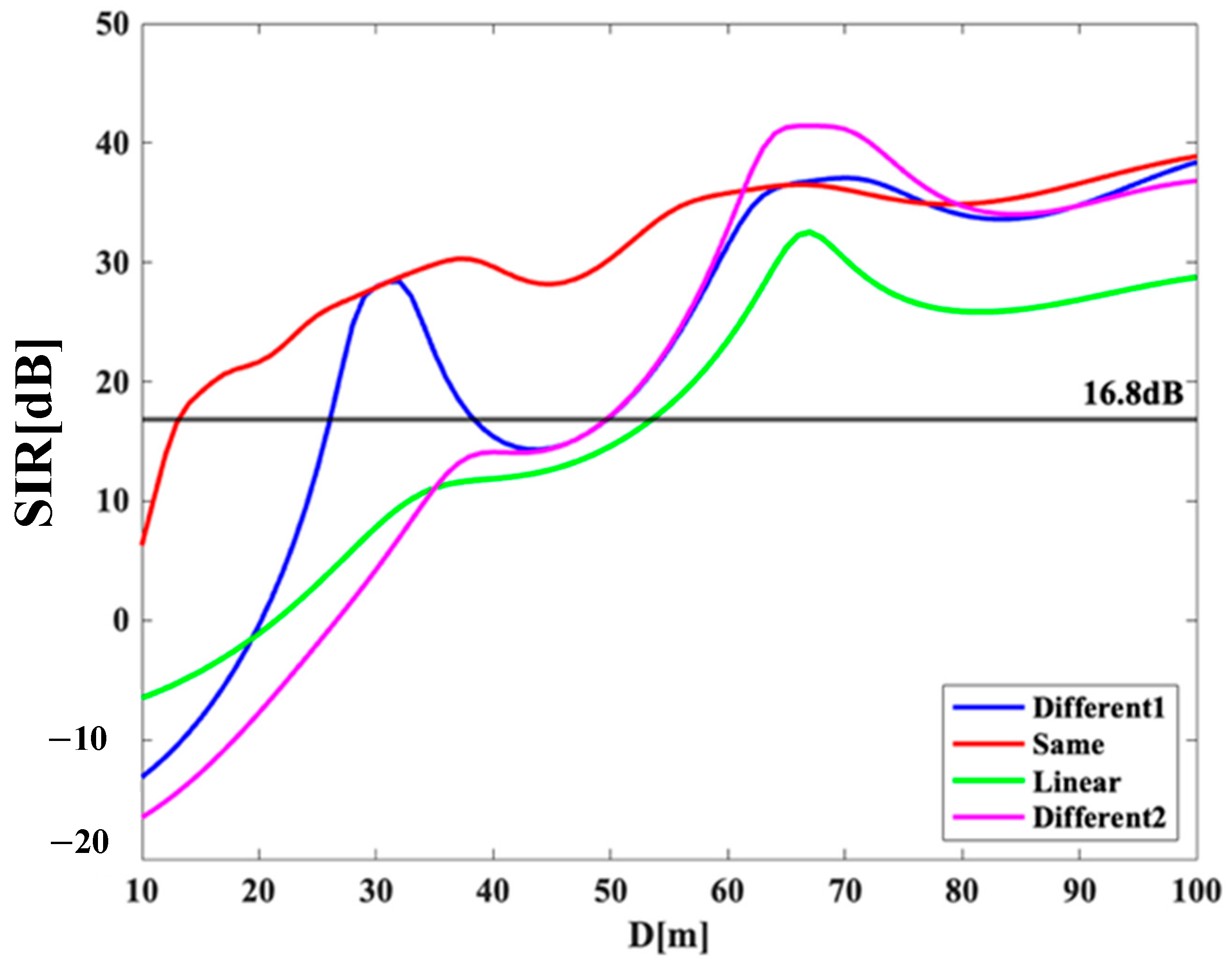
Section 3, the two-wave model was applied to analyze the SIR performance between the access drone and the ground user. A comparison was made using different combination planes of polarization, and our numerical result revealed that the SIR characteristics were improved when antennas of the same kind of circular polarization were employed. In
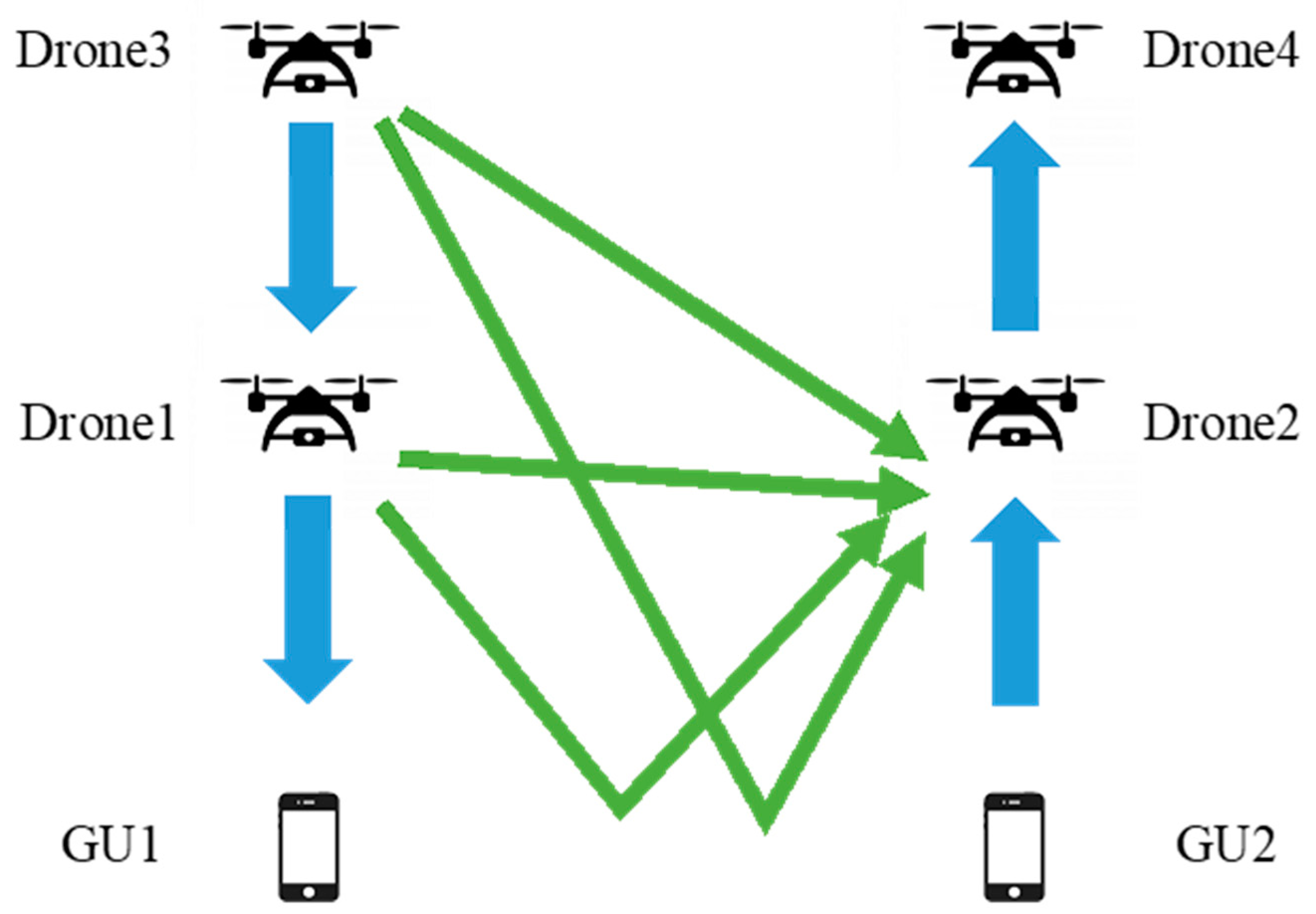
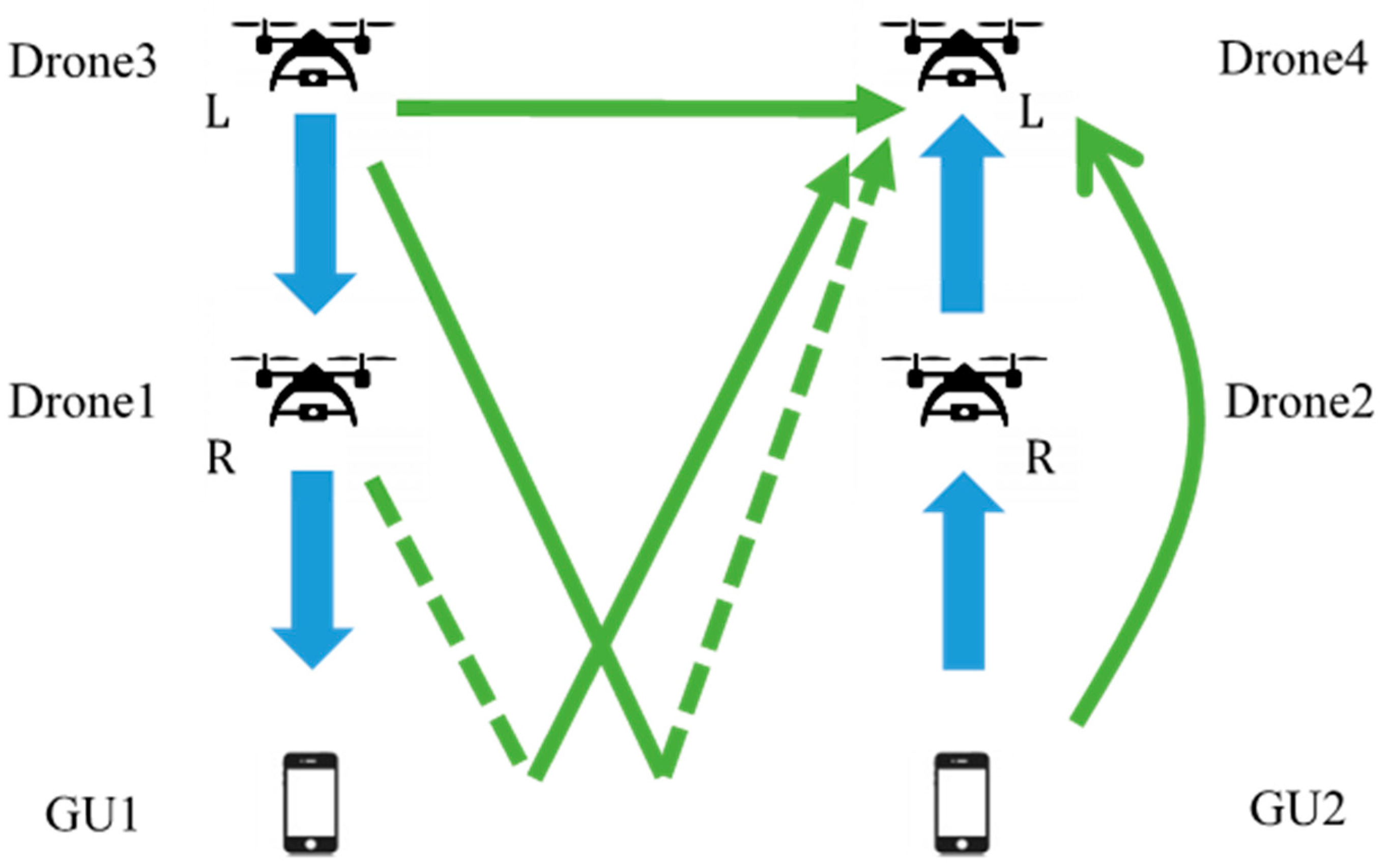
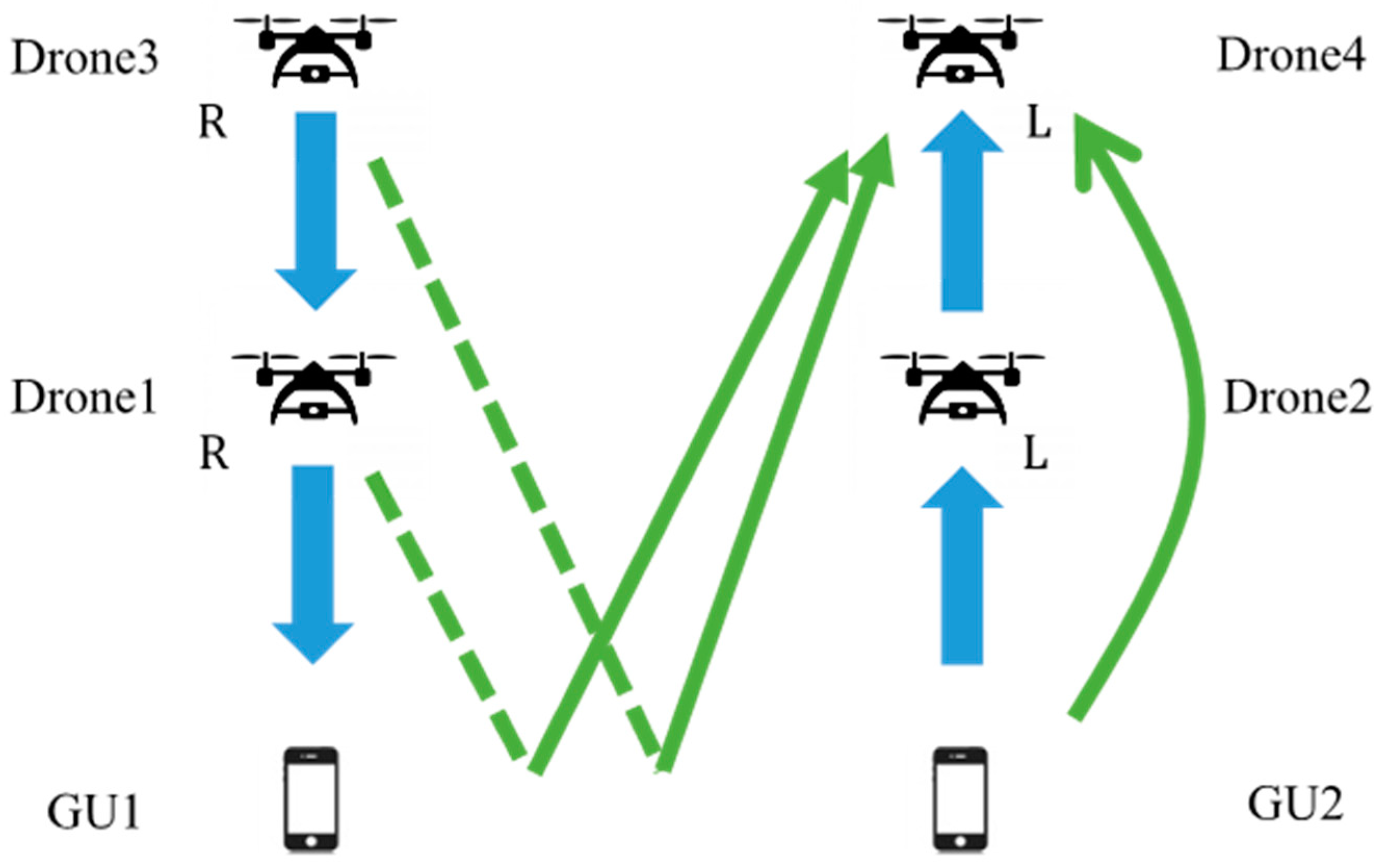
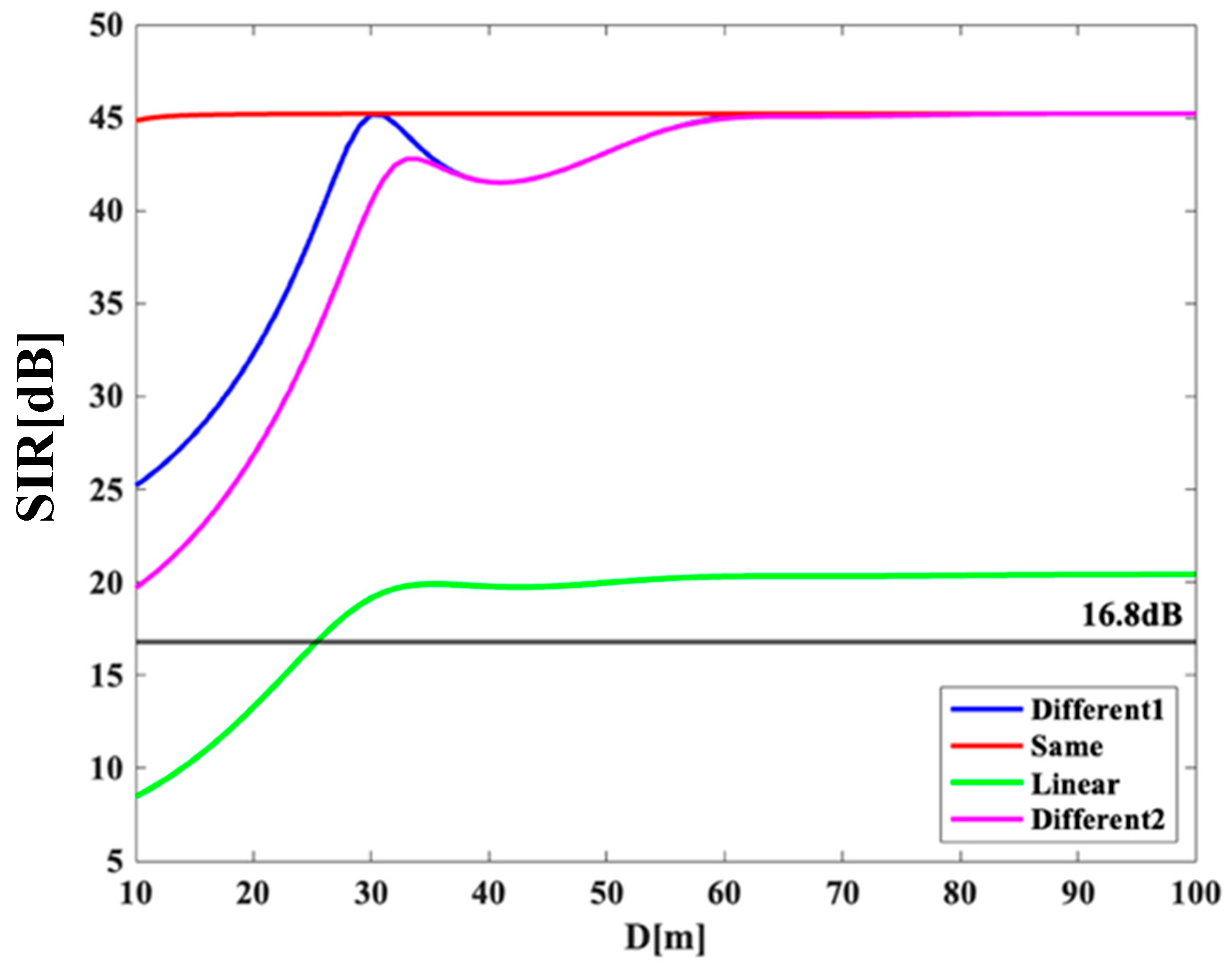
Section 4, we furthermore evaluated the SIR of the system in the existence of backhaul drones. Similarly, it was found that deploying antennas of the same kind of circular polarization to all the access and backhaul links of both UL/DL yields the best performance. Overall, the introduction of circular polarization antennas in our system helped to reduce interference significantly compared to the conventional approach of using linearly polarized antennas. Therefore, we plan to use this type of antenna architecture in our own system in the future. For reference, the findings of our numerical analyses are summarized in
Appendix A. We have constructed a Proof-of-Concept (PoC) system and partially demonstrated the effectiveness of our proposed system (mainly access links) via outdoor experiment in [
8]. Our future topics include extending this PoC system [
8] for the backhaul links and conducting outdoor experiments to demonstrate the effectiveness of introducing circularly polarized antennas in our drone communication networks.





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}