Abstract
In this paper, a low-computation adaptive self-triggered tracking control scheme is proposed for a class of strict-feedback nonlinear systems with input saturation. By introducing two novel error transformation functions, the designed low-computation adaptive control scheme can overcome the problem of complexity explosion in the absence of any filters, such that the developed control scheme is more applicable. In addition, to save communication resources in networked systems, a self-triggered communication strategy is proposed which can predict the next trigger point based on the current information. Compared with traditional event-triggered mechanisms, the computational burden arising from continuous monitoring of threshold conditions was successfully avoided. Furthermore, the input saturation problem considered in this paper prevents the overload phenomenon caused by signal jumps, and the adverse effects are compensated by introducing an auxiliary system. The effectiveness of the developed control scheme is verified through a simulation example.
1. Introduction
In the past few decades, the control of nonlinear systems has become an increasingly popular research topic across various fields [1,2,3]. To date, several control methods have been proposed to address challenges posed by nonlinear dynamics, including robust control [4], sliding mode control [5,6], adaptive control [7,8], etc. Among these methods, adaptive backstepping control has been widely acknowledged as one of the effective approaches to handling nonlinear dynamics in systems. In addition, the presence of uncertain nonlinear dynamics can also affect system performances. In this case, addressing the impact of uncertain dynamics on systems becomes a prerequisite for adaptive backstepping control design. To overcome this challenge, fuzzy logic systems (FLSs) [9,10,11] and neural networks (NNs) [12,13,14] have been introduced in control design to deal with uncertain nonlinearity, primarily due to their outstanding approximation ability. In this way, adaptive backstepping control for uncertain nonlinear systems has achieved rapid developments. In [15], an adaptive control method exploring radial basis function neural networks (RBF NNs) was developed for a class of uncertain nonlinear systems under additional disturbances, where the uncertain dynamics in systems are linearized through the approximation ability of RBF NNs. In [16], based on the backstepping design framework and improved FLSs, an adaptive fuzzy compensation controller is established to handle actuator failures and dead-zone constraints that occur in uncertain nonlinear systems. Although backstepping technology is an important tool for addressing control design problems of nonlinear systems, under the traditional backstepping design framework, the large computational burden has become an important drawback, limiting its wide application.
Specifically, in traditional backstepping technology, the derivation of virtual control signals becomes increasingly burdensome as the number of system orders increases, eventually leading to the problem of complexity explosion, and this will result in extremely high complexity for the final controller. Aiming at this problem, the command-filtered strategy was developed by introducing a first-order low-pass filter and designing corresponding filtering compensation signals to reduce filtering errors [17,18,19,20]. The authors in [21] proposed an adaptive output feedback control strategy by using command filtering and backstepping technology to address the problem of complexity explosion. Unfortunately, with the advent of specific filters, although the problem of complexity explosion was successfully solved, the structure of controllers also became more complex, and filtered compensation signals imposed some additional computational burdens. Based on this situation, in this paper, by introducing a low-computation technology, the computational burdens generated by the backstepping method, command filters, a large number of adaptive parameters, etc, are overcome. Currently, low-computation technology has been applied widely in nonlinear systems. The authors in [22] proposed a low-computation adaptive control method based on prescribed performance, which greatly reduced the computational burden of a system. The tracking control problem for strict-feedback nonlinear systems with unmatched disturbances was considered in [23], where, combined with constraint-handling techniques, a low-computation adaptive fuzzy control strategy was developed. Furthermore, in conventional control schemes, the control signals are updated according to a specific period sampling time, which leads to a large amount of data occupying the communication channel and increases the communication pressure.
Efficient utilization of communication resources is crucial for optimizing the performances of control systems. In the current networked control context, signal transmissions between a controller and an actuator are achieved by sampling a shared communication channel [24]. Despite this, a large number of signals are generated using time-sampling methods, yet the available communication channel bandwidth is usually limited, which exacerbates the communication pressure. To solve the above problems, event-triggered [25,26,27] and self-triggered control strategies [28,29,30] are presented to reduce the amount of information transmissions in communication processes. In [31], an event-triggered mechanism was incorporated into the design of an adaptive control scheme for a category of uncertain nonlinear systems, with the aim of conserving communication resources, where the next trigger point was established by devising a suitable trigger condition (threshold). Therein, the information can be passed to the controller only when the condition is satisfied; otherwise, the current information is discarded. In addition, the event-triggered mechanism requires continuously monitoring signals, which is difficult to achieve in actual systems. Based on this situation, we introduced a self-triggered mechanism to improve it. Differently from traditional event-triggered strategies, the self-triggered control scheme predicts the next trigger point through the current system sampling information, thereby avoiding the need for continuously monitoring system signals.
On the other hand, in practical engineering, input saturation often occurs in amplification and actuator components, which can degrade system performances and even lead to system instability. As a result, the input saturation problem for nonlinear systems is challenging, and it has received a lot of attention. In [32], the authors proposed an adaptive fuzzy control scheme for a class of uncertain non-strict-feedback nonlinear systems with input saturation, where the input saturation problem was solved by introducing an auxiliary design system. In [33], a multigradient recursive reinforcement learning scheme for discrete-time nonlinear systems with input saturation was proposed. In [34], the author presented an observer-based adaptive fuzzy output feedback control strategy for a category of uncertain nonlinear systems with input saturation and output constraints which were prone to unforeseen states, and the designed controller effectively addressed the impact of input saturation and output constraints. Therefore, in the case of reducing the calculation complexity, designing an adaptive self-triggering control scheme that considers both communication resources and input saturation has become a difficult problem.
Motivated by the above discussion, this paper develops a low-computation adaptive self-triggered control strategy for a class of uncertain nonlinear systems with input saturation. The designed scheme avoids the problem of complexity explosion and improves the transmission efficiency of networked systems. The contributions of this paper in comparison with the existing literature are listed below:
- Compared with the existing literature [17,18,19,20,21], the adaptive low-computation control strategy designed in this paper avoids the problem of complexity explosion and reduces the computational burden of a system without introducing any filters.
- To save communication resources, a self-triggered mechanism is designed in this paper which can predict the next trigger point based on the current system information, avoiding the problem of continuous monitoring of thresholds in an event-triggered mechanism [25,26,27] and greatly improving the transmission efficiency of a system.
- When the input signal approaches the saturation limit, an auxiliary system is introduced to produce a compensation signal, which reduces the saturation effects and maintains system performances.
2. Problem Formulation and Preliminaries
2.1. System Description
The majority of engineering systems, such as compressors for jet engines, biochemical processes, active suspension systems, single-link flexible robots, etc., can be converted into strict-feedback forms. The following strict-feedback nonlinear systems are taken into consideration:
where and represent the measured the system output and state vectors, respectively. is the unknown nonlinear functions. is locally Lipschitz in [35]. is the saturation input to system (1) and is represented as such
where is the boundary of . Obviously, when , there is a sharp angle between the curve of the control input and the applied control , resulting in the backstepping method not being applied directly, such that the subsequent smooth function can approximately represent the system’s saturation
where ; then, the saturation input in (2) further establishes that
where is a bounded function, and the bound is straightforward to verify that
where and .
Notice that increases from 0 to A as changes from 0 to ; when is beyond range, the value of decreases from A to 0 as changes.
To facilitate further study, the following assumptions and partial lemmas are given:
Assumption A1.
There exists a constant such that the auxiliary control signal .
Assumption A2
([36]). The reference signal and its first-order derivatives are continuous and bounded. There exist positive constants , , , and , which satisfy , and for , , .
Remark 1.
The traditional backstepping method [37,38,39,40,41] is a popular approach for trajectory tracking and control of nonlinear systems. However, it requires knowledge of the nth-order derivative of the reference signal, which may not be available or practical in some specific industrial fields, such as robotics, aerospace, and transportation. For example, in aerospace, the reference trajectory of an aircraft or a spacecraft may be preplanned or provided by a ground station, but the availability and accuracy of the nth-order derivative of the reference signal may be limited by various factors, such as atmospheric disturbances, sensor noise, etc. The implementation of the method proposed in this paper is made simpler, and the computational burden is decreased, since there is no need for information about the higher-order derivatives of the reference signal.
Lemma 1
([16]). There are two variables, and , and the property listed below applies to the hyperbolic function .
Lemma 2.
For and , the hyperbolic function has unique properties.
Our control goal is to developed a low-computation adaptive self-triggered controller such that the tracking error is as small as desired and the output of system (1) can track the reference signal effectively.
2.2. RBF NNs Approximation Design
To achieve the control objective, we apply the RBF NNs’ approximation capability to handle the unknown nonlinear function : on a compact set with arbitrary accuracy [42,43,44,45]; it follows that
where and represent the input vector, with denoting ideal weight vectors; L is RBF NNs’ node number satisfying . The basis function vector is expanded as , where the Gaussian function is expressed as
where denotes the center of basis functions, and its width is expressed by . The approximation error satisfies , and is a constant. stands for the actual value of the unknown continuous function of the system under consideration.
3. Controller Design
In this section, a controller that is structurally and computationally efficient is presented. Define the following coordinate transformation:
where , , and are the output tracking error, the difference between virtual control signal and state , and the reference signal, respectively. is an auxiliary control signal which is given later. Then, in accordance with the requirements, we design two novel error transformation functions:
where denotes the upper bound of , which is provided later in the following design.
The adaptive law and virtual controller are given as follows:
where and are design parameters. denotes the design constraint processing scheme, which aims to restrict the error variable in . To improve the system performance, we choose [46]
where and are freely selectable design parameters. They represent the limit value of and the convergence rate, respectively. Moreover, the selection of needs to have the following conditions:
The realization of depends on this circumstance.
4. Stability Analysis
In a closed-loop system, all command signals should be bounded under sufficient conditions, as demonstrated by the following lemma:
Lemma 3.
By the boundedness of , , , and (), we can deduce that is bounded.
Proof.
According to the design of RBF NNs, it is easy to obtain and . It is noted by the properties of and that and are equivalent. By reviewing (17), one has
Next, we can conclude the following:
Theorem 1.
Considering a class of strict-feedback system (1) with saturated inputs, given initial conditions (18), with the support of Lemmas 1 and 2 and Assumptions 1 and 2, the following theory can be established:
- (1)
- The output tracking error gradually approaches and stabilizes within the residual set as time progresses.
- (2)
- The boundedness of all signals in a closed-loop system is guaranteed.
- (3)
- The Zeno phenomena are successfully avoided.
Proof.
In the beginning, the closed-loop dynamics are formulated. Define . Combining (1), (10), and (11), the first-order derivative of is obtained as follows, where the nth step is redesigned due to the inclusion of the self-triggered mechanism and the saturation input.
The Lyapunov function candidate is selected as , where
where , and denotes the estimation of .
Then, we need to prove by the converse method that all error variables are constrained within the predetermined set [47], i.e., when , they satisfy
Assume the relationship between at least one error variable and a specific time point exists as follows:
where and ; then, define the time at which (25) is first violated as . In light of (18), we know that . Thus,
The aforementioned negative circumstance is reversed throughout the subsequent analysis and proof process. ☐
Step 1: In this step, we first analyze the dynamical behavior of the output tracking error. The boundedness of on is ensured with the support of Assumption 1, (10), and (27). That is, the system state always remains within the compact set when . Using the approximation capability of RBF NNs, we have
where is the approximation error satisfying the condition of .
By analyzing Assumption 2, (21), and (27), it is clear that and are bounded. In summary, when , is guaranteed to be bounded. For convenience, we denote . Therefore, (30) can be rewritten as
According to Young’s inequality and recalling (23), one has
Thus, (31) can be rewritten as
where and
Using Young’s inequality again, it is concluded that
Bring the above equation back to (35), further satisfies
To sum up, we arrive at
Next, the boundedness of is illustrated by discussing two different cases of .
Case 1: , where is a parameter used for analysis, the definition of which is given subsequently. Apparently,
Case 2: . In this case, there is
Let and earn
By integrating over both sides of (47), it is not difficult to see that
Step i : The dynamic behavior of is described in this step. Firstly, it is necessary to validate that the system state is guaranteed at the set in . The time interval forms the basis of the analysis as follows:
- (1)
- (2)
- Under (15), the boundedness of can be derived directly.
- (3)
Recall that establishing the boundedness of in step 1 yields that the system states ,..., are guaranteed in the compact space , and the unknown nonlinear factor in (24) is approximated by RBF NNs, i.e.,
where with is the approximation error.
Notice from (21) and (27) that , and are bounded as . Then, we ensure that is bounded on . By being continuous and being bounded, we can obtain that for , the nonlinear function has a bound. On this basis, the boundedness of can also be guaranteed, as can governed by (1). Based on Lemma 3, is also bounded on the interval .
The results presented above support the existence of a positive constant , which makes . Thus, (50) becomes
Using Young’s inequality and noticing , we have
Then, (51) turns into
where and .
Applying the same method as (36), we arrive at
In this step, we also elaborate the boundedness of by analyzing two different cases of .
Case 1: , where is an analysis parameter. Obviously,
Case 2: . In this case, there are
Integrating both ends of the above equation, when , it can be clearly seen that
Step n: Incorporating (12) into (1) yields that is computed as
where is the defined dynamic system [32].
Taking in the Lyapunov function (23) and combining it with (20), for , it is straightforward to observe that
In a similar way to the previous step, it can be recursively deduced that the system states guarantee in a compact space . Therefore, the unknown function is approximated via RBF NNs, i.e.,
where is the approximation error and satisfies .
The self-triggered mechanism is designed as
where , . and are positive design parameters. represents the interval between two successfully triggered control signals; with and denote the change rates of the control signal. When (72) is triggered, will be input immediately into the system (1). The following trigger point will also be obtained at the same time and control signal will remain at during . is expressed as
where , and are positive design parameters.
Remark 2.
Given that the next trigger point is calculated, we introduce a term to mitigate potential calculation errors. This compensation method, which is widely used in nonlinear system control, has proven effective.
Remark 3.
In contrast to the conventional event-triggered mechanism [26,27,31,48] which requires continuous monitoring of thresholds, the self-triggered scheme proposed in this paper uses current system state information to determine the next trigger point for controller updates. This approach overcomes the monitoring challenge and maintains the communication resource-saving benefits of the event-triggered mechanism.
From (72), is derived. Additionally, we then obtain . By setting the time-varying continuous function , and , , can be obtained. Thus, we have .
Since
where . Then, combined with (16), (71) is rewritten as
where is bounded [34]. Based on (5), (14), and (13), , , and are bounded, so that . Through some algebraic manipulators, for , it can be obtained that
where and . Accordingly, the bound of further satisfies
It is possible to demonstrate by classified discussion that
where . In this scenario
Noticing that . Combining the results in (48), (67), and (76), and considering the initial condition is bounded, we can see that
It is obvious that remains bounded on the interval . In the light of the definition of in (14), it can be stated that for each error variable , guarantees within the prescribed boundary function . The conclusion (27) under assumption (26) is in contradiction. Therefore, the assumption (26) is not reasonable, thus justifying the conclusion (25).
Invoking (10) and combining (17) and (25) for , it follows that
which demonstrates that the tracking error gradually diminishes until it reaches a residual set in close proximity to 0. Based on (25) and using the same steps as before, it follows by step-by-step derivation that the results of (48), (67), and (76) hold for all , i.e.,
Further derived
With the aid of (23), we obtain and . By (15), we obtain . From (11), (12), and (25), hold. Up to this point, the boundedness of all signals in the closed-loop system is guaranteed.
Given that is bounded, we can infer from (72) that is also bounded. Consequently, we can determine , where is a bounded minimum time interval, which implies that there will be no Zeno phenomenon [49]. Thus, Theorem 1 can be established.
5. Simulation Example and Analysis
5.1. Example Model 1
In this section, the effectiveness of our proposed method is verified by a numerical example. Consider the following nonlinear system with input saturation as
where the unknown nonlinear functions and are chosen as and , respectively. The reference trajectory is selected as . Additionally, input is described by
where . According to (9), the Gaussian basis functions of the RBF NNs can be defined as
where , , , , . The parameters of the self-triggered mechanism are set as , , . The designed controller, adaptive law, and auxiliary system are
where , , , and . The initial conditions for all variables are chosen as follows: , , , , and . With (17) and (18), the performance bounds on and are designated as and , respectively.
The numerical simulation example of the research results in this paper is shown in Figure 1, Figure 2, Figure 3, Figure 4, Figure 5 and Figure 6, where Figure 1 shows the tracking error and user-specified error boundary, which meet the transient and steady-state tracking behavior. Figure 2 illustrates tracking error trajectories using the command filtering method. The control input trajectory of the system is shown in Figure 3. Figure 4 displays the original input signal and the self-triggered input signal, which demonstrates that the proposed self-triggered controller can effectively conserve communication resources. Figure 5 shows the trajectory of the control input u under the command filter control method for the same control effect. Figure 6 represents the trajectories of adaptive law.
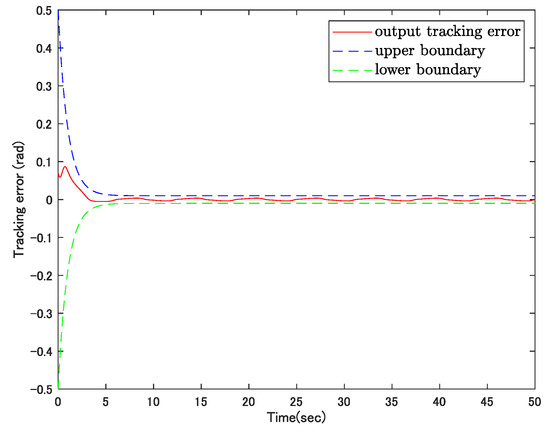
Figure 1.
Tracking error y− and the error boundaries ±.
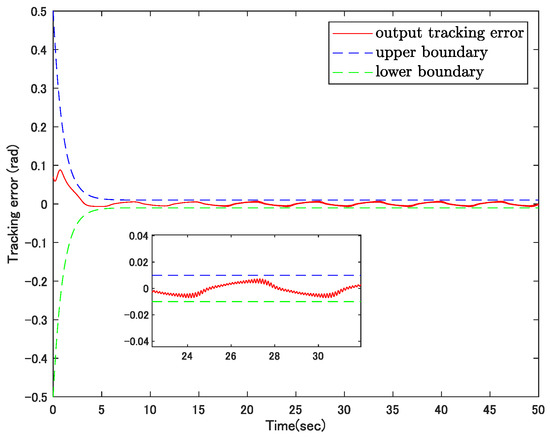
Figure 2.
Tracking error via the command-filtered control method.
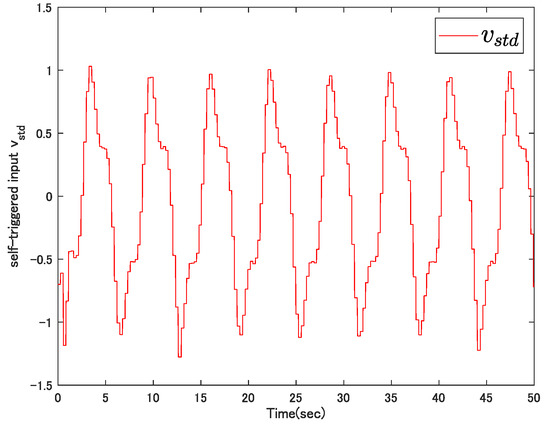
Figure 3.
Trajectory of self-triggered input .
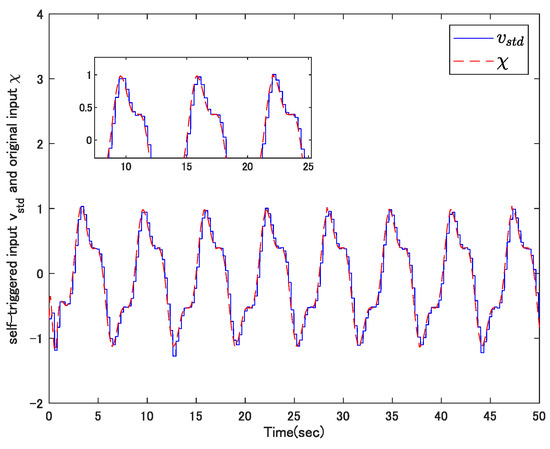
Figure 4.
Trajectories of self-triggered input and original input .
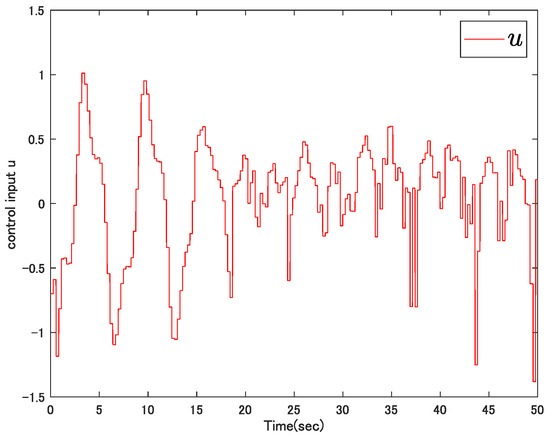
Figure 5.
Trajectory of control input via the command-filtered control method.
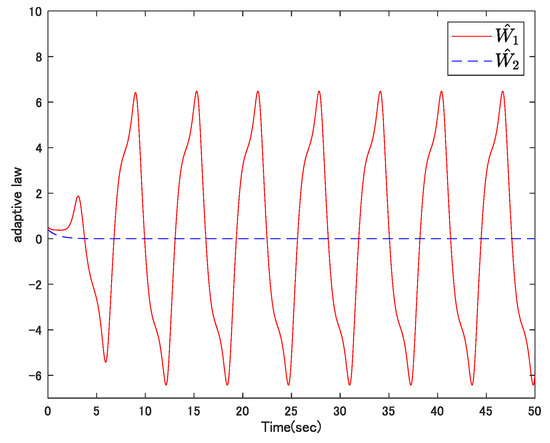
Figure 6.
Trajectories of adaptive law and .
5.2. Example Model 2
Consider a single-link mobile robot arm driven by a brushed DC motor with input saturation, which can be expressed in the following form [50]
where q represents the link position, and and represent the motor armature current and input control voltage, respectively. Define , , , and . Accordingly, the dynamic model can be further shown as
where the unknown dynamics are and , and the actual parameters are given as , , , , , and . Furthermore, the desired reference trajectory is given as . In addition, the parameters of RBF NNs are chosen in accordance with example 5.1. The parameters of the self-triggered mechanism are set as , , and , and the designed controller and adaptive law are
where , , , , and . The initial conditions for all variables are chosen as follows: , , , , , and . Next, we define performance functions as , , and .
The simulation results of the proposed controller being applied to the robot manipulator are shown in Figure 7, Figure 8, Figure 9 and Figure 10. The error of the link position p with the desired reference trajectory is depicted in Figure 7, in which the transient and steady-state performance guarantees within the boundaries can be seen. Figure 8 shows the trajectory curve of , and the convergence of the adaptive parameters and are illustrated in Figure 9. The required armature motor voltage and self-triggering inputs are shown in Figure 10. As can be observed, the suggested self-triggering method reduces the controller’s update frequency while saving communication resources and increasing the effectiveness of data transmission. Additionally, for the purpose of comparison, applying the command filtering method under the same performance specifications and initial conditions, the tracking error and system input are shown in Figure 11 and Figure 12, respectively. From Figure 10 and Figure 12, it can be seen that the low-computation strategy in this paper requires a control input voltage of 10 Vdc. However, the input voltage required by the command filtering method requires a larger control action.
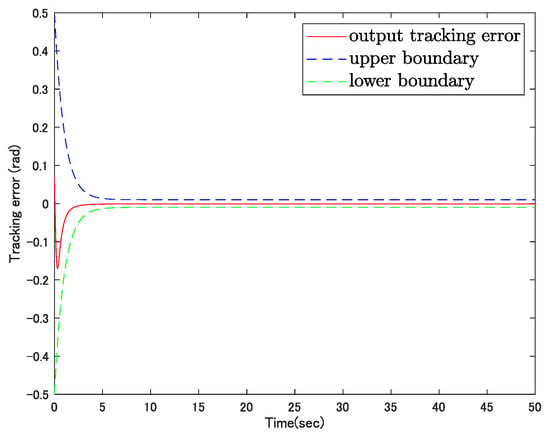
Figure 7.
Tracking error q− and the error boundaries .
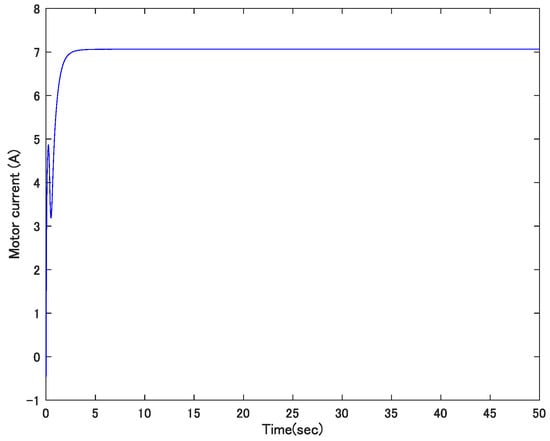
Figure 8.
Trajectory of motor armature current .
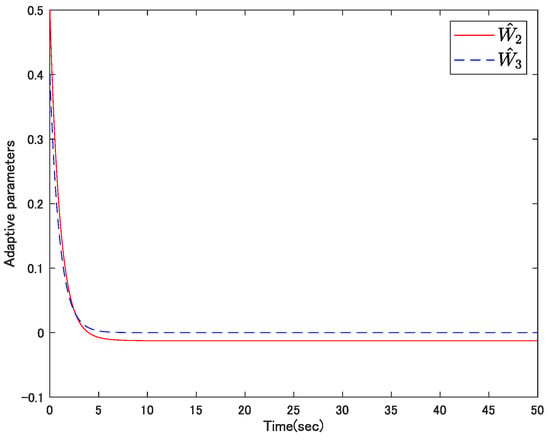
Figure 9.
Trajectories of adaptive law and .
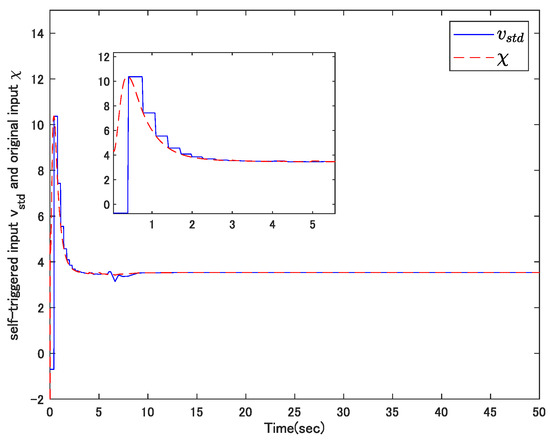
Figure 10.
Trajectoryies of input control voltage and self-triggered input .
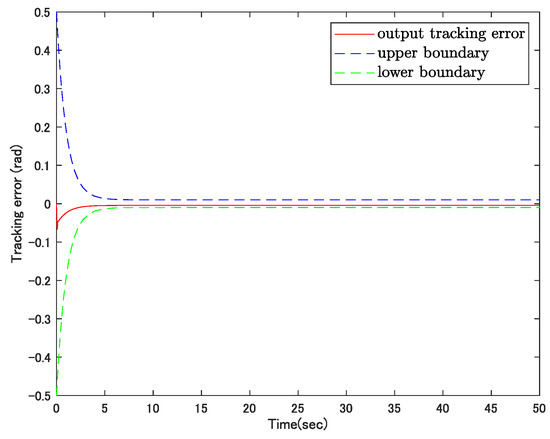
Figure 11.
Tracking error via the command-filtered control method.
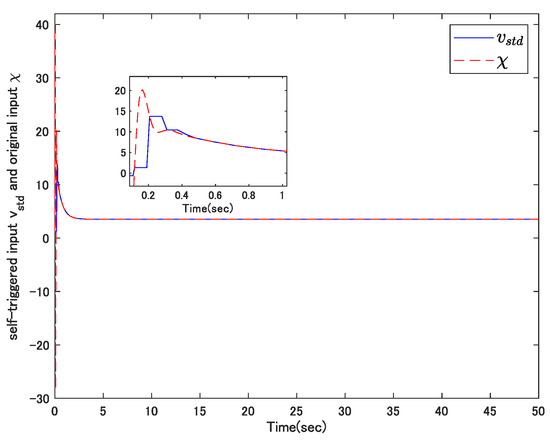
Figure 12.
Trajectories of control input via the command-filtered control method.
5.3. Discussion
From the simulation results, it is clear that despite the lack of information on the reference signal derivative, the boundedness of the closed-loop signal and the specified tracking quality are guaranteed. It can be seen that the low-computation strategy in this paper requires a control input voltage of 10 Vdc. However, under the same performance specifications and initial conditions, the input voltage required by the command filtering method requires a larger control action. Furthermore, the control system can effectively achieve the tracking of the reference signal with the self-triggered input signal.
6. Conclusions
This paper investigates the problem of tracking control of uncertain network systems against input saturation. To solve this problem, we introduce a low-computation adaptive self-triggered control method using prescribed performance. The computational complexity was reduced by using two novel error transformation functions instead of the command filtering method. It is easier to implement in practical applications because the higher-order derivative information of the reference signal is not required. In addition, our auxiliary design system has effectively solved the input saturation problem, while ensuring that all closed-loop system signals remain bounded. This paper considers a class of strict-feedback systems, where a wide variety of engineering plants can be modeled in the form of strict feedback or can be converted to strict feedback, such as jet engine compressors, aircraft wing rocks, and single-link flexible robots. Finally, a numerical simulation and a practical simulation confirmed the effectiveness of our proposed method. Since the control strategy proposed in this paper is based on state feedback, which means that the system state is required to be completely known, our future work will attempt to extend the results to control schemes based on output feedback.
Author Contributions
Conceptualization, X.Z.; methodology, N.X.; software, W.W.; validation, A.M.A., N.X. and W.W.; formal analysis, B.N.; investigation, W.W.; resources, X.Z.; writing—original draft preparation, W.W.; writing—review and editing, N.X. and W.W.; supervision, B.N.; funding acquisition, X.Z. All authors have read and agreed to the published version of the manuscript.
Funding
This research work was funded by Institutional Fund Projects under grant no. (IFPIP: 132-611-1443). The authors gratefully acknowledge technical and financial support provided by the Ministry of Education and King Abdulaziz University, DSR, Jeddah, Saudi Arabia.
Data Availability Statement
Not applicable.
Acknowledgments
This research work was funded by Institutional Fund Projects under grant no. (IFPIP: 132-611-1443). The authors gratefully acknowledge technical and financial support provided by the Ministry of Education and King Abdulaziz University, DSR, Jeddah, Saudi Arabia.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Huo, X.; Karimi, H.R.; Zhao, X.; Wang, B.; Zong, G. Adaptive-critic design for decentralized event-triggered control of constrained nonlinear interconnected systems within an identifier-critic framework. IEEE Trans. Cybern. 2021, 52, 7478–7491. [Google Scholar] [CrossRef] [PubMed]
- Zhang, H.; Zhao, X.; Wang, H.; Zong, G.; Xu, N. Hierarchical Sliding-Mode Surface-Based Adaptive Actor-Critic Optimal Control for Switched Nonlinear Systems With Unknown Perturbation. IEEE Trans. Neural Netw. Learn. Syst. 2022. [Google Scholar] [CrossRef] [PubMed]
- Zhang, H.; Zhao, X.; Zhang, L.; Niu, B.; Zong, G.; Xu, N. Observer-based adaptive fuzzy hierarchical sliding mode control of uncertain under-actuated switched nonlinear systems with input quantization. Int. J. Robust Nonlinear Control 2022, 32, 8163–8185. [Google Scholar] [CrossRef]
- Dong, S.; Chen, G.; Liu, M.; Wu, Z.-G. Robust adaptive H∞ control for networked uncertain semi-markov jump nonlinear systems with input quantization. Sci. China Inf. Sci. 2022, 65, 1–2. [Google Scholar] [CrossRef]
- Zhang, H.; Wang, H.; Niu, B.; Zhang, L.; Ahmad, A.M. Sliding-mode surface-based adaptive actor-critic optimal control for switched nonlinear systems with average dwell time. Inf. Sci. 2021, 580, 756–774. [Google Scholar] [CrossRef]
- Fei, J.; Wang, Z.; Liang, X.; Feng, Z.; Xue, Y. Fractional sliding-mode control for microgyroscope based on multilayer recurrent fuzzy neural network. IEEE Trans. Fuzzy Syst. 2021, 30, 1712–1721. [Google Scholar] [CrossRef]
- Chi, R.; Li, H.; Shen, D.; Hou, Z.; Huang, B. Enhanced p-type control: Indirect adaptive learning from set-point updates. IEEE Trans. Autom. Control 2022, 68, 1600–1613. [Google Scholar] [CrossRef]
- Yu, J.; Shi, P.; Lin, C.; Yu, H. Adaptive neural command filtering control for nonlinear mimo systems with saturation input and unknown control direction. IEEE Trans. Cybern. 2019, 50, 2536–2545. [Google Scholar] [CrossRef]
- Zhu, Z.; Pan, Y.; Zhou, Q.; Lu, C. Event-triggered adaptive fuzzy control for stochastic nonlinear systems with unmeasured states and unknown backlash-like hysteresis. IEEE Trans. Fuzzy Syst. 2020, 29, 1273–1283. [Google Scholar] [CrossRef]
- Roman, R.-C.; Precup, R.-E.; Petriu, E.M. Hybrid data-driven fuzzy active disturbance rejection control for tower crane systems. Eur. J. Control 2021, 58, 373–387. [Google Scholar] [CrossRef]
- Zhang, H.; Liu, Y.; Dai, J.; Wang, Y. Command filter based adaptive fuzzy finite-time control for a class of uncertain nonlinear systems with hysteresis. IEEE Trans. Fuzzy Syst. 2020, 29, 2553–2564. [Google Scholar] [CrossRef]
- Liu, S.; Niu, B.; Zong, G.; Zhao, X.; Xu, N. Adaptive neural dynamic-memory event-triggered control of high-order random nonlinear systems with deferred output constraints. IEEE Trans. Autom. Sci. Eng. 2023. [Google Scholar] [CrossRef]
- Fu, C.; Wang, Q.-G.; Yu, J.; Lin, C. Neural network-based finite-time command filtering control for switched nonlinear systems with backlash-like hysteresis. IEEE Trans. Neural Netw. Learn. Syst. 2020, 32, 3268–3273. [Google Scholar] [CrossRef]
- Tang, F.; Wang, H.; Chang, X.; Zhang, L.; Alharbi, K. Dynamic Event-Triggered Control for Discrete-Time Nonlinear Markov Jump Systems Using Policy Iteration-Based Adaptive Dynamic Programming. Nonlinear Anal. Hybrid Syst. 2023, 49, 101338. [Google Scholar] [CrossRef]
- Shi, X.; Cheng, Y.; Yin, C.; Huang, X.; Zhong, S.-M. Design of adaptive backstepping dynamic surface control method with rbf neural network for uncertain nonlinear system. Neurocomputing 2019, 330, 490–503. [Google Scholar] [CrossRef]
- Zhang, C.; Chen, Z.; Wang, J.; Liu, Z.; Chen, C.P. Fuzzy adaptive two-bit-triggered control for a class of uncertain nonlinear systems with actuator failures and dead-zone constraint. IEEE Trans. Cybern. 2020, 51, 210–221. [Google Scholar] [CrossRef]
- Xia, J.; Li, B.; Su, S.-F.; Sun, W.; Shen, H. Finite-time command filtered event-triggered adaptive fuzzy tracking control for stochastic nonlinear systems. IEEE Trans. Fuzzy Syst. 2020, 29, 1815–1825. [Google Scholar] [CrossRef]
- Qiu, J.; Ma, M.; Wang, T. Event-triggered adaptive fuzzy fault-tolerant control for stochastic nonlinear systems via command filtering. IEEE Trans. Syst. Man Cybern. Syst. 2020, 52, 1145–1155. [Google Scholar] [CrossRef]
- Li, B.; Xia, J.; Sun, W.; Park, J.H.; Sun, Z.-Y. Command filter-based event-triggered adaptive neural network control for uncertain nonlinear time-delay systems. Int. J. Robust Nonlinear Control 2020, 30, 6363–6382. [Google Scholar] [CrossRef]
- Zhao, L.; Yu, J.; Wang, Q.-G. Finite-time tracking control for nonlinear systems via adaptive neural output feedback and command filtered backstepping. IEEE Trans. Neural Netw. Learn. Syst. 2020, 32, 1474–1485. [Google Scholar] [CrossRef]
- Yu, J.; Zhao, L.; Yu, H.; Lin, C. Barrier lyapunov functions-based command filtered output feedback control for full-state constrained nonlinear systems. Automatica 2019, 105, 71–79. [Google Scholar] [CrossRef]
- Cheng, F.; Niu, B.; Zhang, L.; Chen, Z. Prescribed performance-based low-computation adaptive tracking control for uncertain nonlinear systems with periodic disturbances. IEEE Trans. Circuits Syst. II Express Briefs 2022, 69, 4414–4418. [Google Scholar] [CrossRef]
- Zhang, J.-X.; Yang, G.-H. Low-computation adaptive fuzzy tracking control of unknown nonlinear systems with unmatched disturbances. IEEE Trans. Fuzzy Syst. 2019, 28, 321–332. [Google Scholar] [CrossRef]
- Song, Y.; Wang, Y.; Holloway, J.; Krstic, M. Time-varying feedback for regulation of normal-form nonlinear systems in prescribed finite time. Automatica 2017, 83, 243–251. [Google Scholar] [CrossRef]
- Li, Y.; Wang, H.; Zhao, X.; Xu, N. Event-triggered adaptive tracking control for uncertain fractional-order nonstrict-feedback nonlinear systems via command filtering. Int. J. Robust Nonlinear Control 2022, 32, 7987–8011. [Google Scholar] [CrossRef]
- Ma, H.; Li, H.; Lu, R.; Huang, T. Adaptive event-triggered control for a class of nonlinear systems with periodic disturbances. Sci. China Inf. Sci. 2020, 63, 1–15. [Google Scholar] [CrossRef]
- Wang, H.; Xu, K.; Qiu, J. Event-triggered adaptive fuzzy fixed-time tracking control for a class of nonstrict-feedback nonlinear systems. IEEE Trans. Circuits Syst. I Regul. Pap. 2021, 68, 3058–3068. [Google Scholar] [CrossRef]
- Chen, W.; Wang, J.; Ma, K.; Wu, W. Adaptive self-triggered control for a nonlinear uncertain system based on neural observer. Int. J. Control 2022, 95, 1922–1932. [Google Scholar] [CrossRef]
- Cuan, Z.; Ding, D.-W.; An, C. Robust self-triggered control for nonlinear cyber-physical systems with state constraints under dos attacks. Int. J. Robust Nonlinear Control 2023, 33, 2133–2144. [Google Scholar] [CrossRef]
- Zhou, H.; Kong, D.; Park, J.H.; Li, W. Periodic self-triggered impulsive synchronization of hybrid stochastic complex-valued delayed networks. IEEE Trans. Control Netw. Syst. 2023. [CrossRef]
- Zhao, C.; Liu, X.; Zhong, S.; Shi, K.; Liao, D.; Zhong, Q. Secure consensus of multi-agent systems with redundant signal and communication interference via distributed dynamic event-triggered control. ISA Trans. 2021, 112, 89–98. [Google Scholar] [CrossRef]
- Zhou, Q.; Wang, L.; Wu, C.; Li, H.; Du, H. Adaptive fuzzy control for nonstrict-feedback systems with input saturation and output constraint. IEEE Trans. Syst. Man Cybern. Syst. 2016, 47, 1–12. [Google Scholar] [CrossRef]
- Wang, T.; Wang, H.; Xu, N.; Zhang, L.; Alharbi, K. Sliding-Mode Surface-Based Decentralized Event-Triggered Control of Partially Unknown Interconnected Nonlinear Systems via Reinforcement Learning. Inf. Sci. 2023, 641, 119070. [Google Scholar] [CrossRef]
- Li, Y.; Tong, S.; Li, T. Adaptive fuzzy output-feedback control for output constrained nonlinear systems in the presence of input saturation. Fuzzy Sets Syst. 2014, 248, 138–155. [Google Scholar] [CrossRef]
- Krstic, M.; Kokotovic, P.V.; Kanellakopoulos, I. Nonlinear and Adaptive Control Design; John Wiley & Sons, Inc.: Hoboken, NJ, USA, 1995. [Google Scholar]
- Ren, B.; Ge, S.S.; Tee, K.P.; Lee, T.H. Adaptive neural control for output feedback nonlinear systems using a barrier lyapunov function. IEEE Trans. Neural Netw. 2010, 21, 1339–1345. [Google Scholar]
- Tong, S.; Sun, K.; Sui, S. Observer-based adaptive fuzzy decentralized optimal control design for strict-feedback nonlinear large-scale systems. IEEE Trans. Fuzzy Syst. 2017, 26, 569–584. [Google Scholar] [CrossRef]
- Li, Y.-X.; Yang, G.-H. Observer-based fuzzy adaptive event-triggered control codesign for a class of uncertain nonlinear systems. IEEE Trans. Fuzzy Syst. 2017, 26, 1589–1599. [Google Scholar] [CrossRef]
- Zhang, T.; Ge, S.S.; Hang, C.C. Adaptive neural network control for strict-feedback nonlinear systems using backstepping design. Automatica 2000, 36, 1835–1846. [Google Scholar] [CrossRef]
- Li, Y.-X.; Yang, G.-H. Fuzzy adaptive output feedback fault-tolerant tracking control of a class of uncertain nonlinear systems with nonaffine nonlinear faults. IEEE Trans. Fuzzy Syst. 2015, 24, 223–234. [Google Scholar] [CrossRef]
- Tong, S.; Li, Y. Adaptive fuzzy output feedback tracking backstepping control of strict-feedback nonlinear systems with unknown dead zones. IEEE Trans. Fuzzy Syst. 2011, 20, 168–180. [Google Scholar] [CrossRef]
- Zhao, Y.; Zhang, H.; Chen, Z.; Wang, H.; Zhao, X. Adaptive neural decentralised control for switched interconnected nonlinear systems with backlash-like hysteresis and output constraints. Int. J. Syst. Sci. 2022, 53, 1545–1561. [Google Scholar] [CrossRef]
- Cheng, F.; Wang, H.; Zhang, L.; Ahmad, A.; Xu, N. Decentralized adaptive neural two-bit-triggered control for nonstrict-feedback nonlinear systems with actuator failures. Neurocomputing 2022, 500, 856–867. [Google Scholar] [CrossRef]
- Liu, Z.; Gao, H.; Lin, W.; Qiu, J.; Rodriguez-Andina, J.; Qu, D. B-spline wavelet neural network-based adaptive control for linear motor-driven systems via a novel gradient descent algorithm. IEEE Trans. Ind. Electron. 2023. [Google Scholar] [CrossRef]
- Li, Y.; Tong, S. Adaptive neural networks prescribed performance control design for switched interconnected uncertain nonlinear systems. IEEE Trans. Neural Netw. Learn. Syst. 2017, 29, 3059–3068. [Google Scholar] [CrossRef] [PubMed]
- Bechlioulis, C.P.; Rovithakis, G.A. Robust adaptive control of feedback linearizable mimo nonlinear systems with prescribed performance. IEEE Trans. Autom. Control 2008, 53, 2090–2099. [Google Scholar] [CrossRef]
- Zhang, J.-X.; Yang, G.-H. Prescribed performance fault-tolerant control of uncertain nonlinear systems with unknown control directions. IEEE Trans. Autom. Control 2017, 62, 6529–6535. [Google Scholar] [CrossRef]
- Li, T.; Yang, D.; Xie, X.; Zhang, H. Event-triggered control of nonlinear discrete-time system with unknown dynamics based on hdp (λ). IEEE Trans. Cybern. 2021, 52, 6046–6058. [Google Scholar] [CrossRef]
- Johansson, K.H.; Egerstedt, M.; Lygeros, J.; Sastry, S. On the regularization of zeno hybrid automata. Syst. Control Lett. 1999, 38, 141–150. [Google Scholar] [CrossRef]
- Dawson, D.M.; Carroll, J.J.; Schneider, M. Integrator backstepping control of a brush dc motor turning a robotic load. IEEE Trans. Control Syst. Technol. 1994, 2, 233–244. [Google Scholar] [CrossRef]












Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).