
Model Predictive Control-Based Integrated Path Tracking and Velocity Control for Autonomous Vehicle with Four-Wheel Independent Steering and Driving



Abstract
:1. Introduction
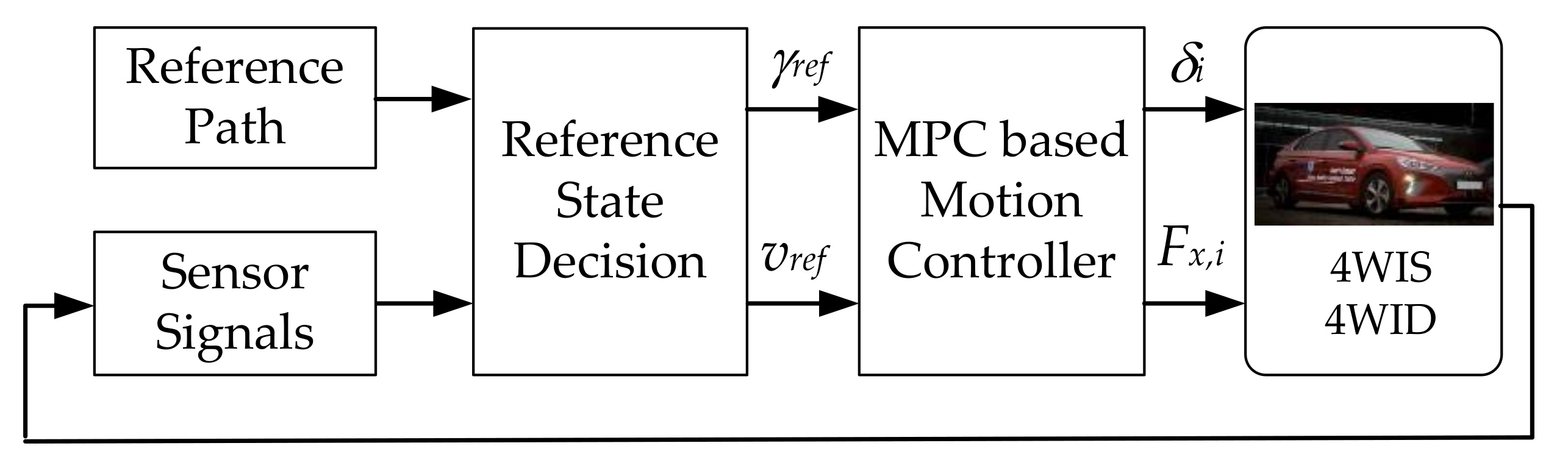
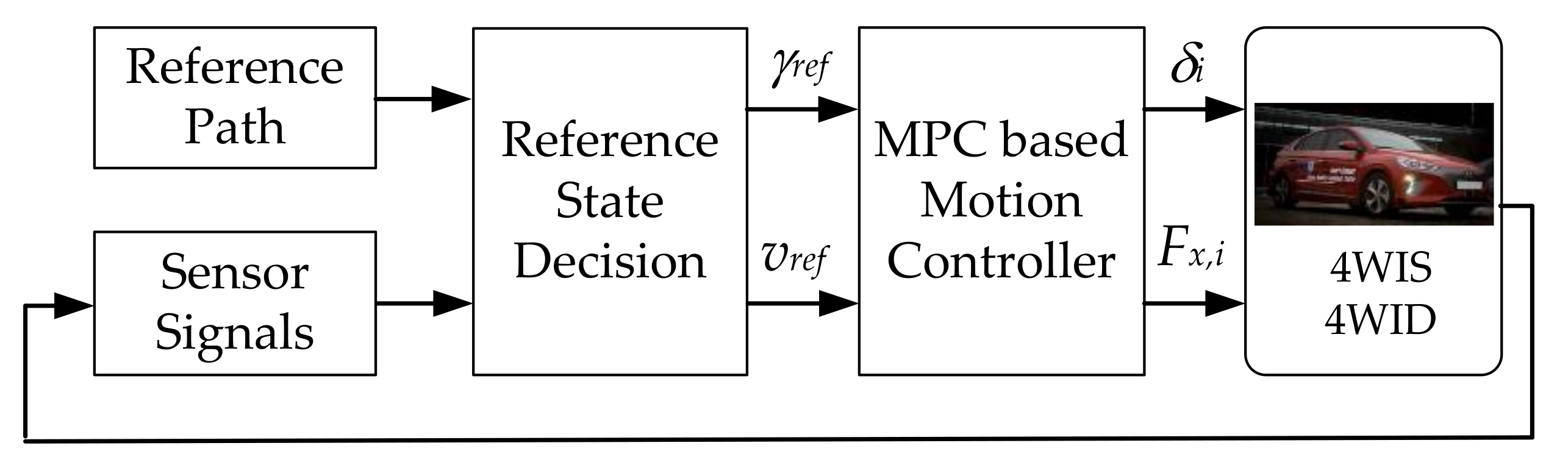
- In the proposed algorithm, the path tracking and velocity controllers determine the control inputs, required for autonomous vehicles with 4WIS/4WID, with a single integrated controller, which distributes the control efforts into the steering angle and wheel torque of each wheel.
- The reference states can be determined without assumptions on the road shapes and vehicle models. Therefore, the reference state decision module can be used for various road conditions and vehicle systems.
- The proposed MPC controller uses the vehicle model as a constraint. The vehicle model is not included in other modules. Therefore, even if the actuator configuration changes, it can only be used by modifying the constraint.
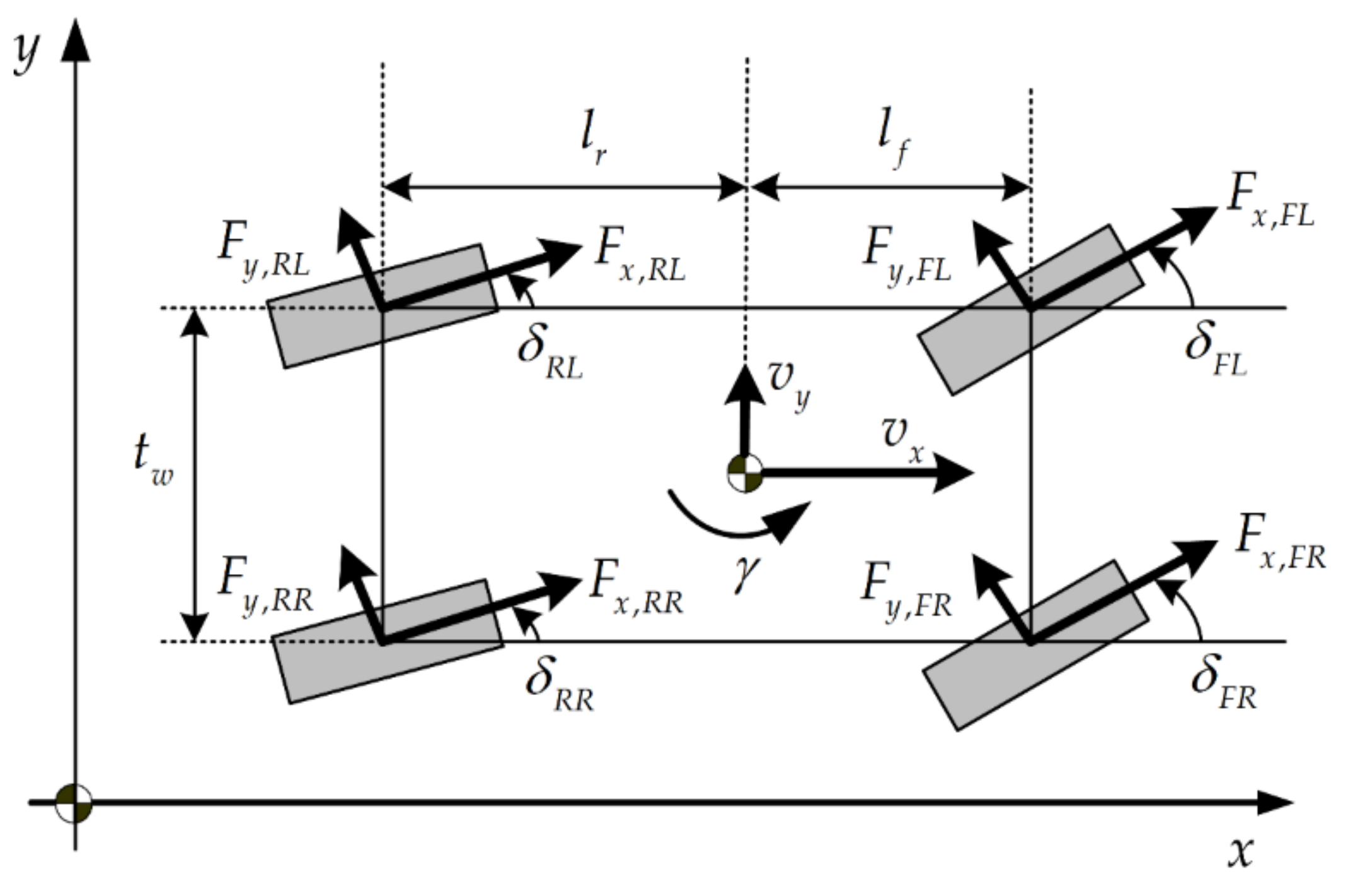
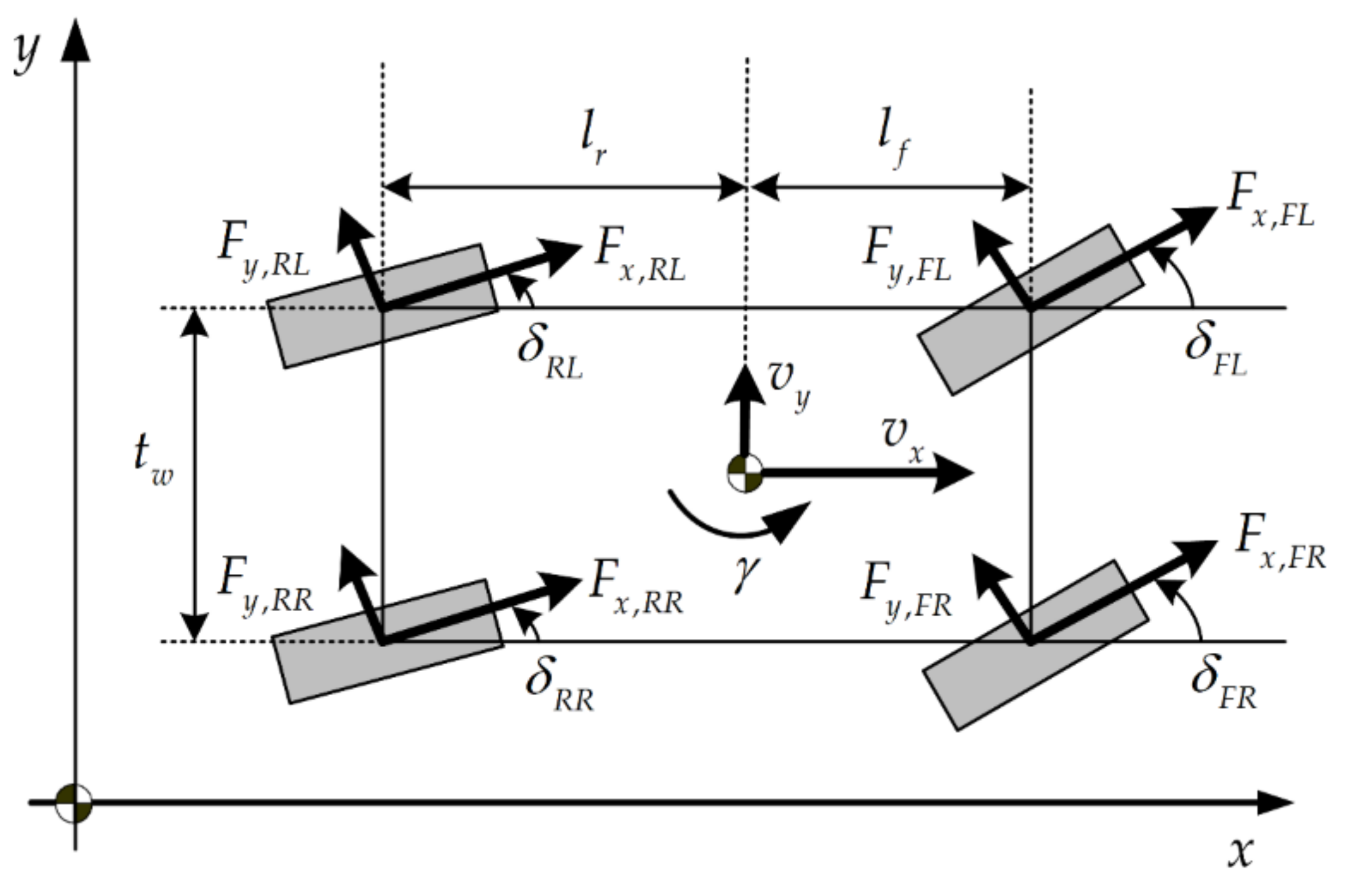
2. Vehicle Model
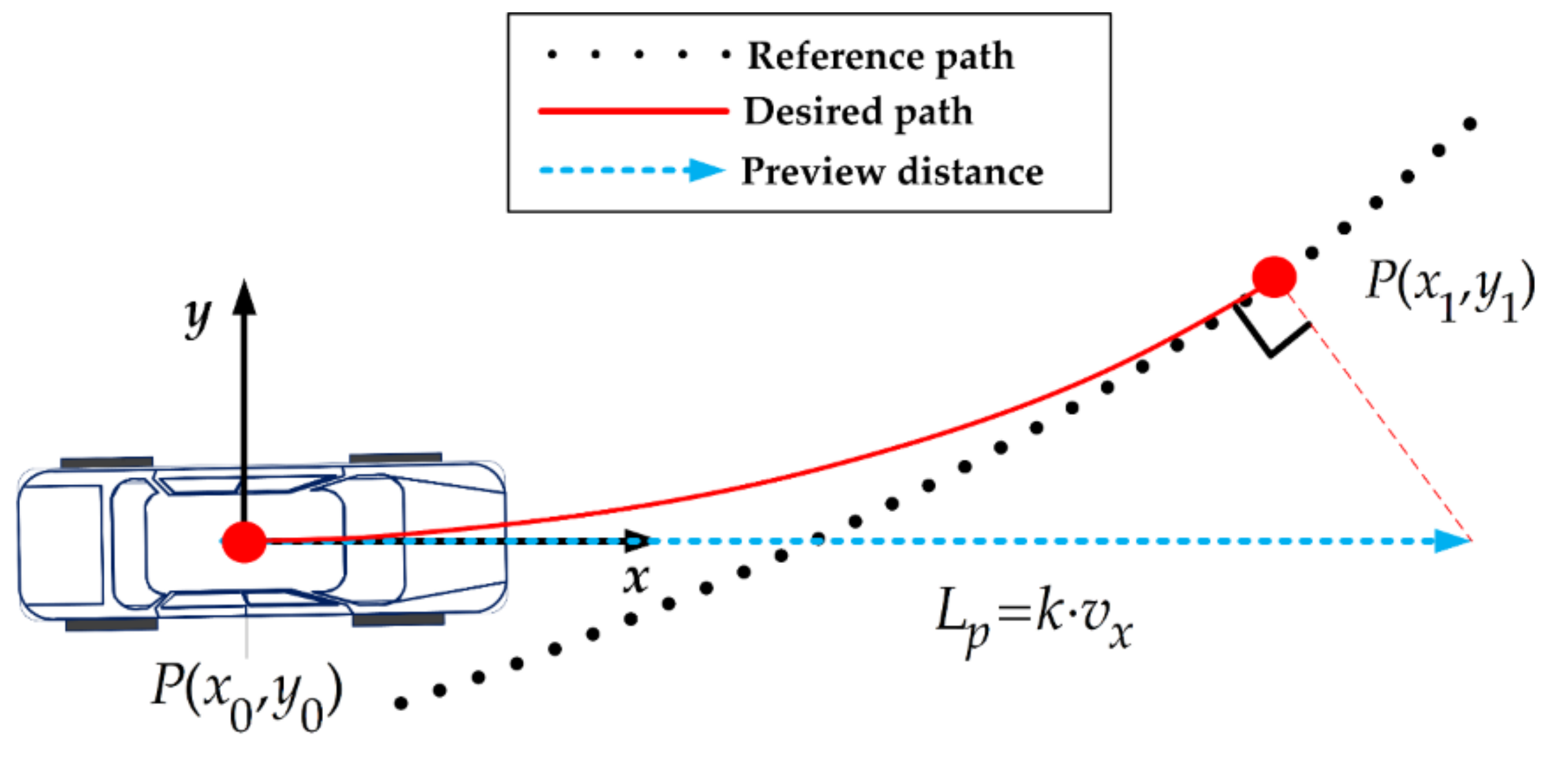
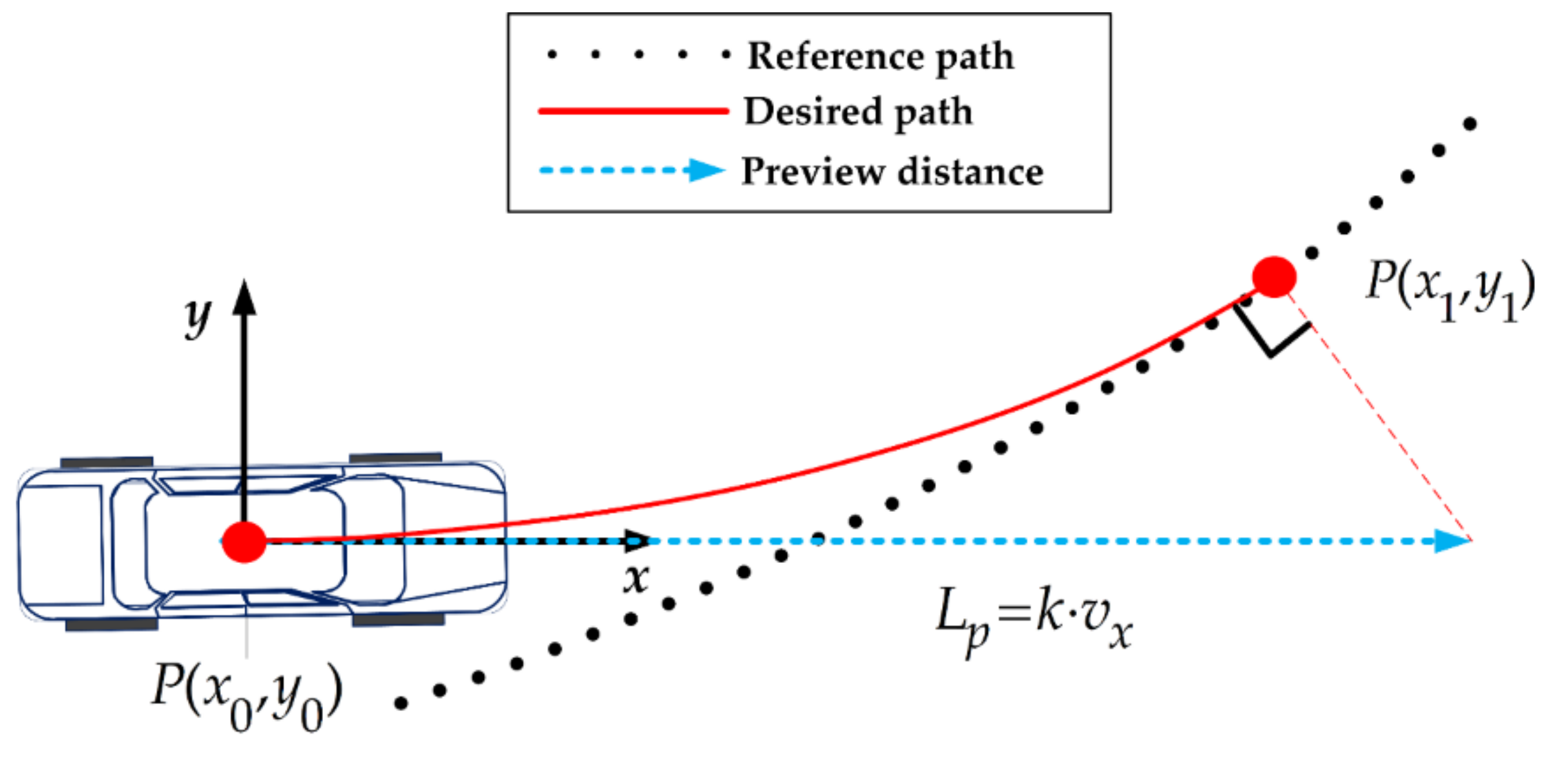
3. Reference State Decision
4. Design of Linear Time-Varying Model Predictive Controller
4.1. Discretization and Linearization of the Vehicle Model
4.2. Cost Function and Constraints
5. Simulation
5.1. Base Algorithms
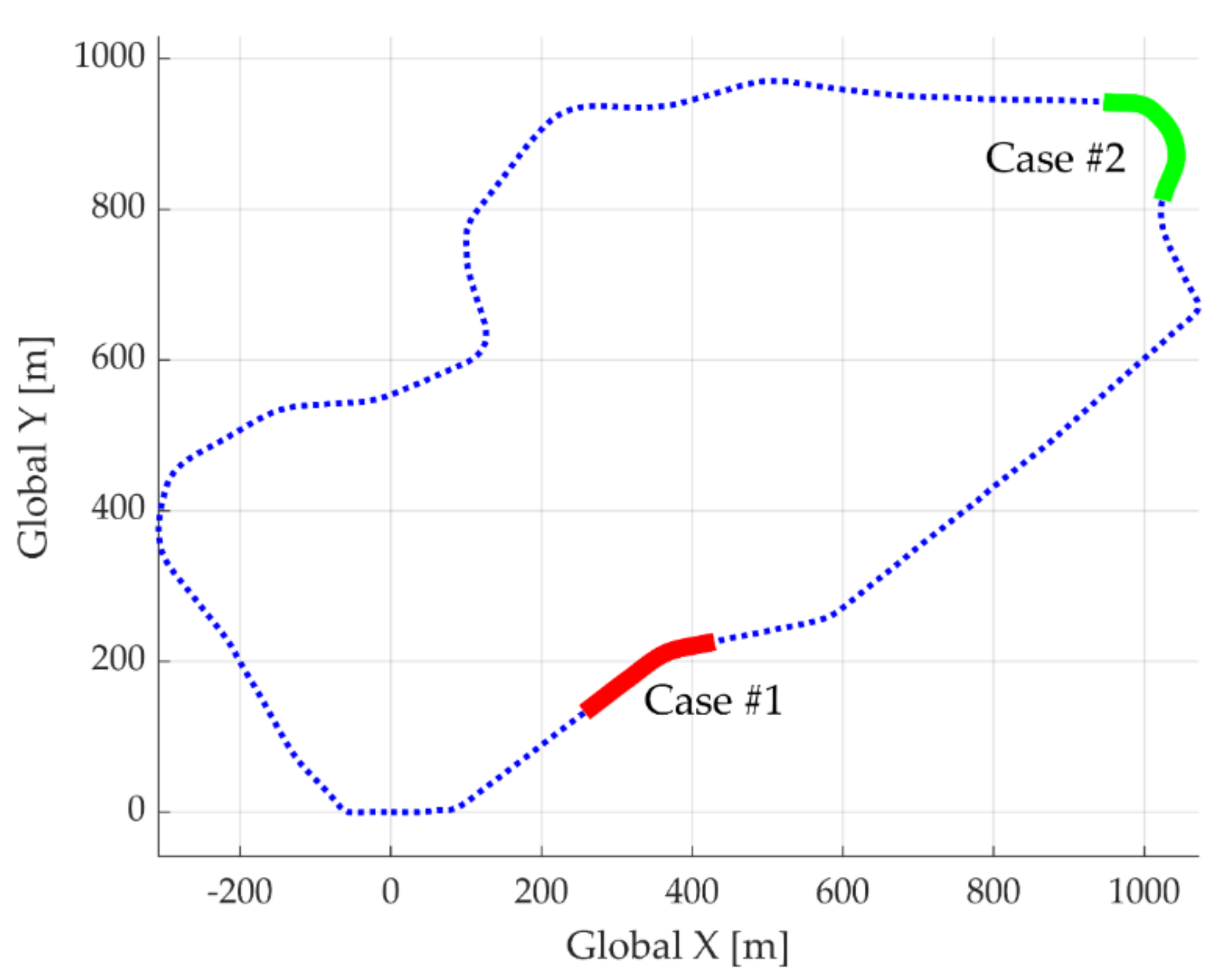
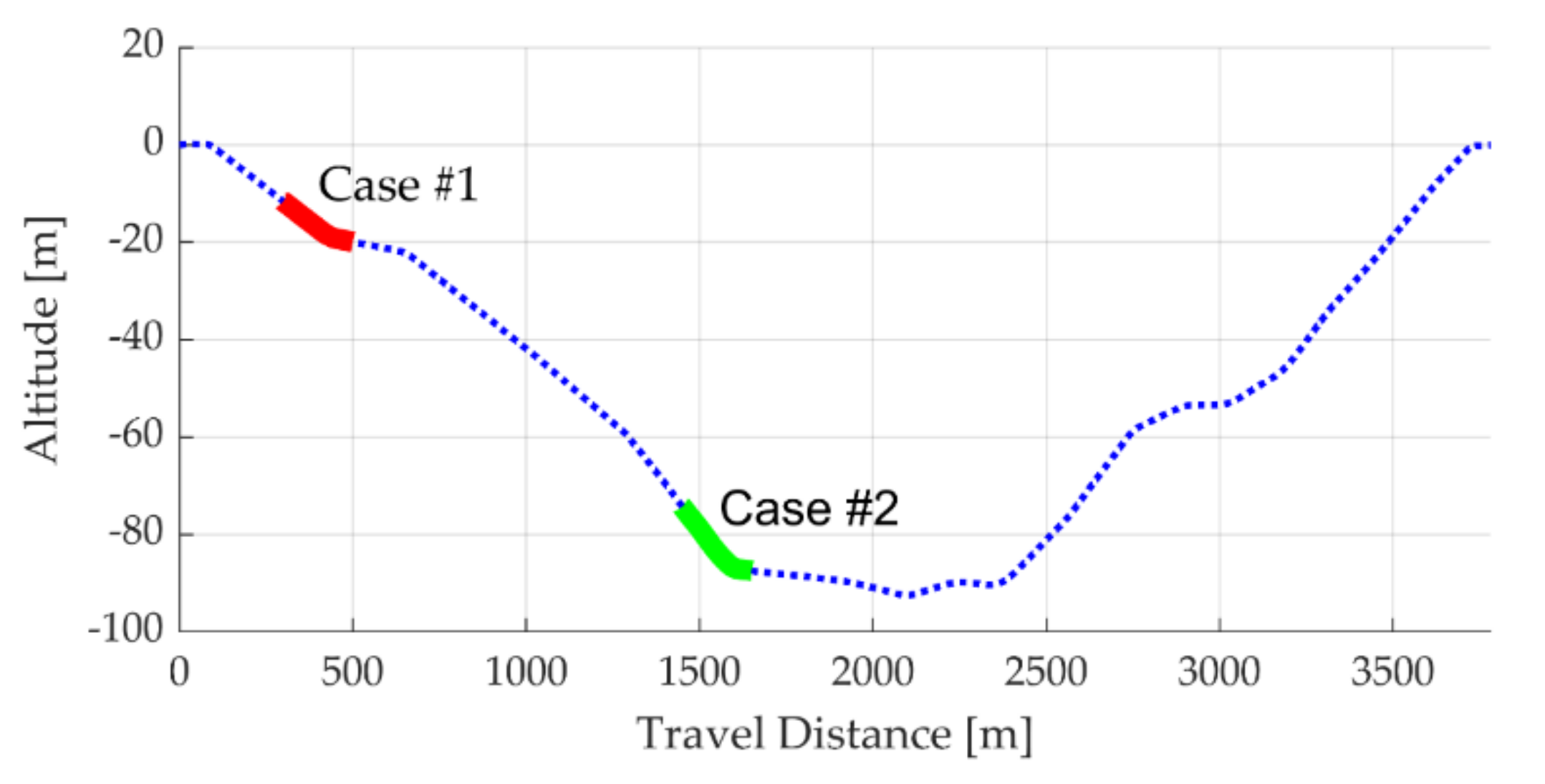
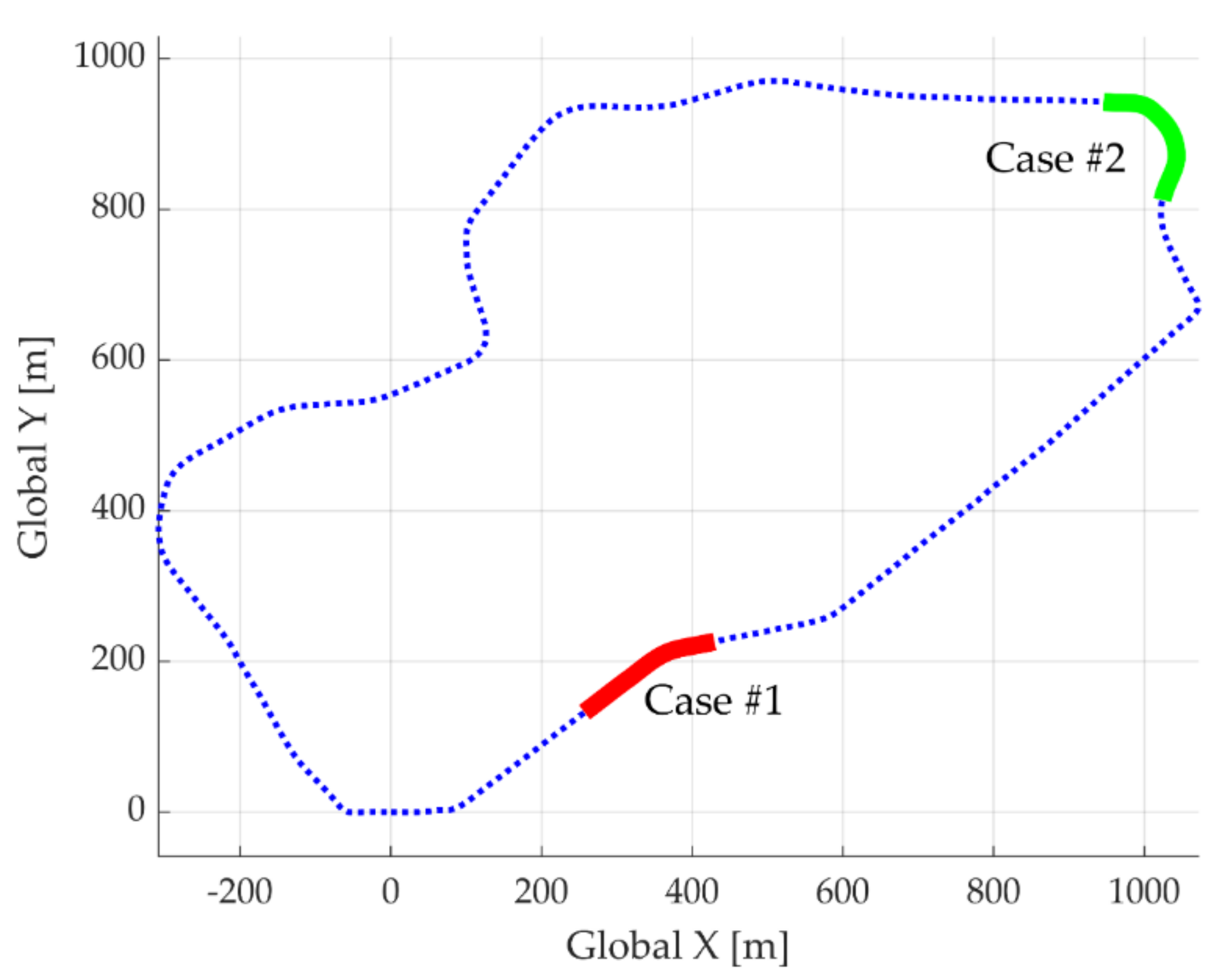
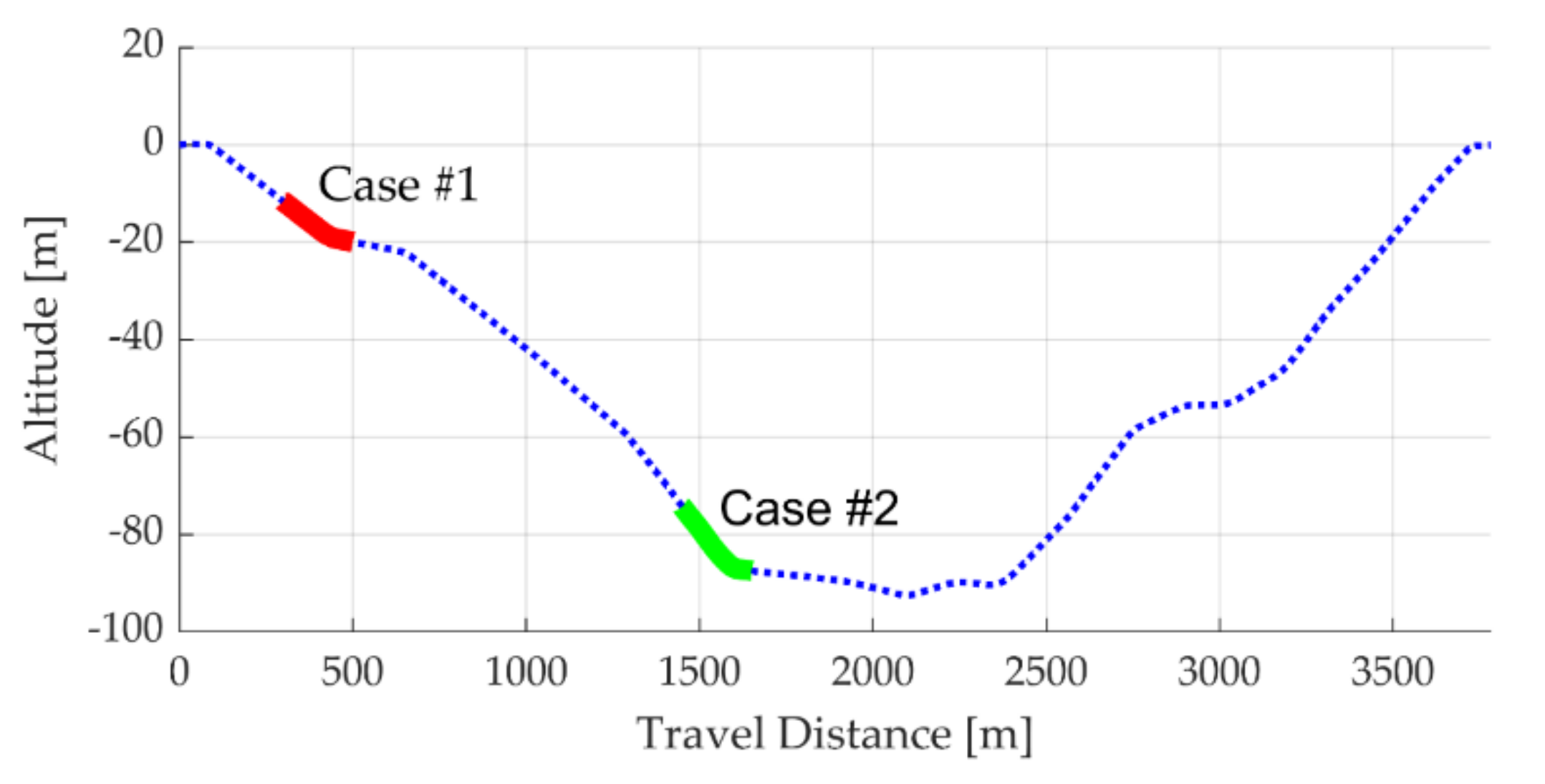
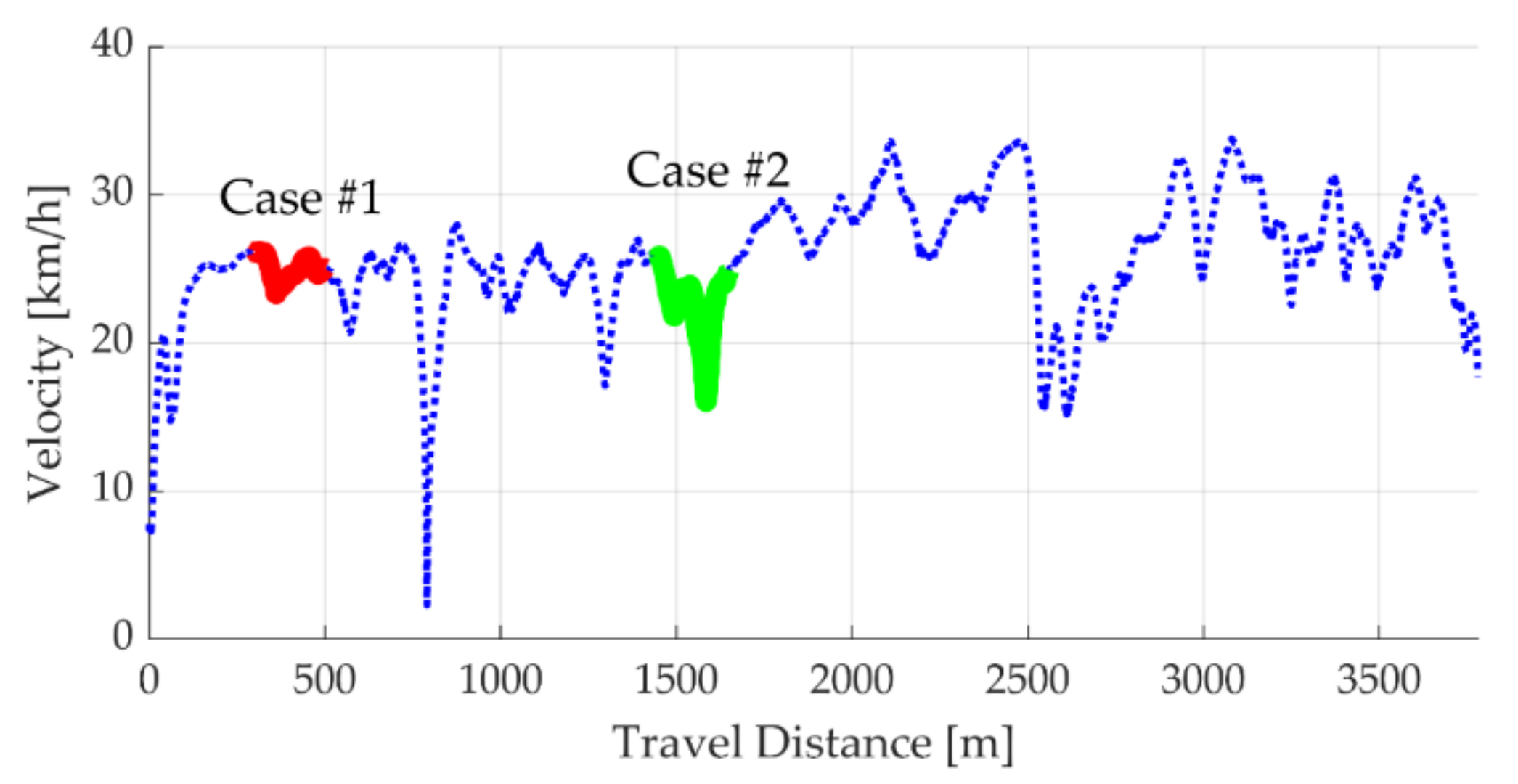
5.2. Simulation Environments
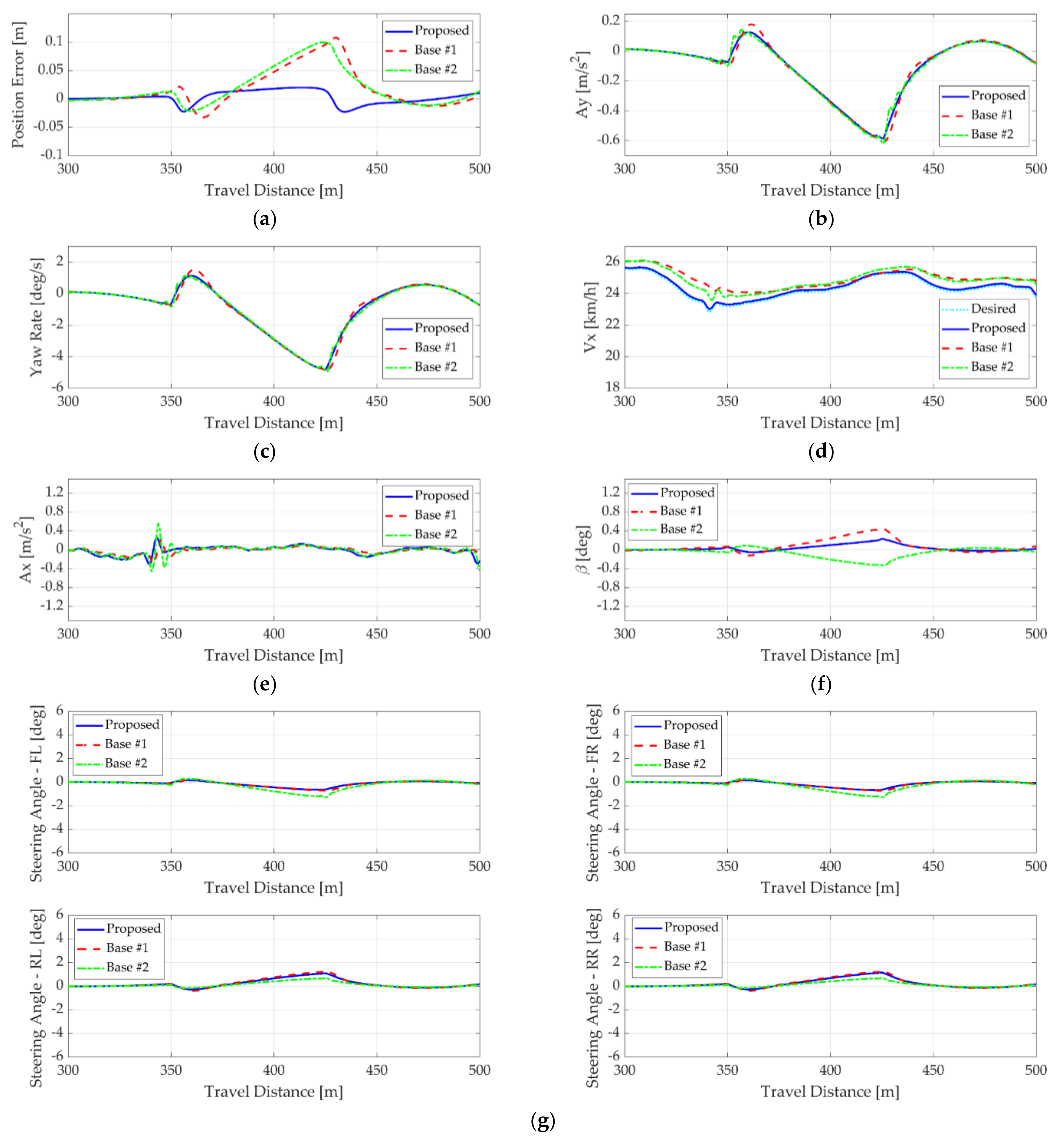
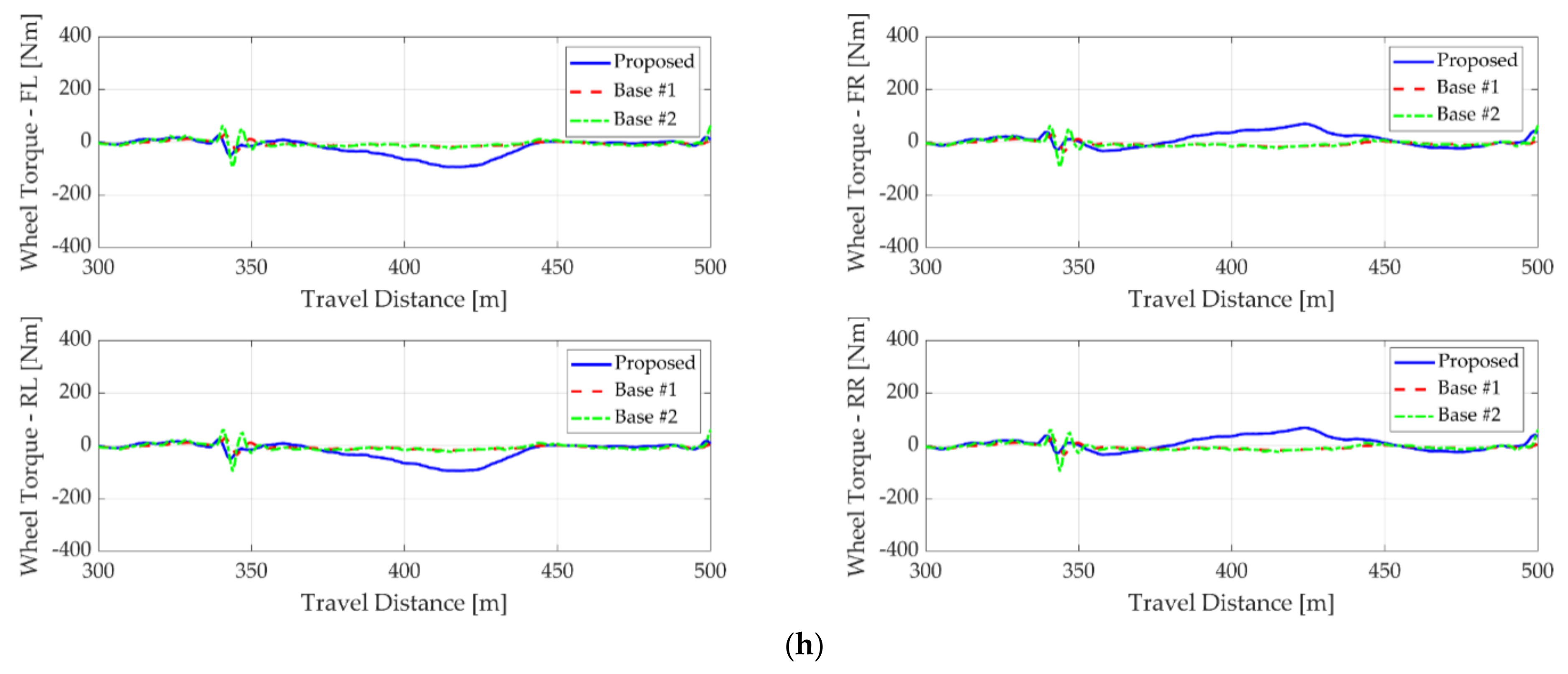
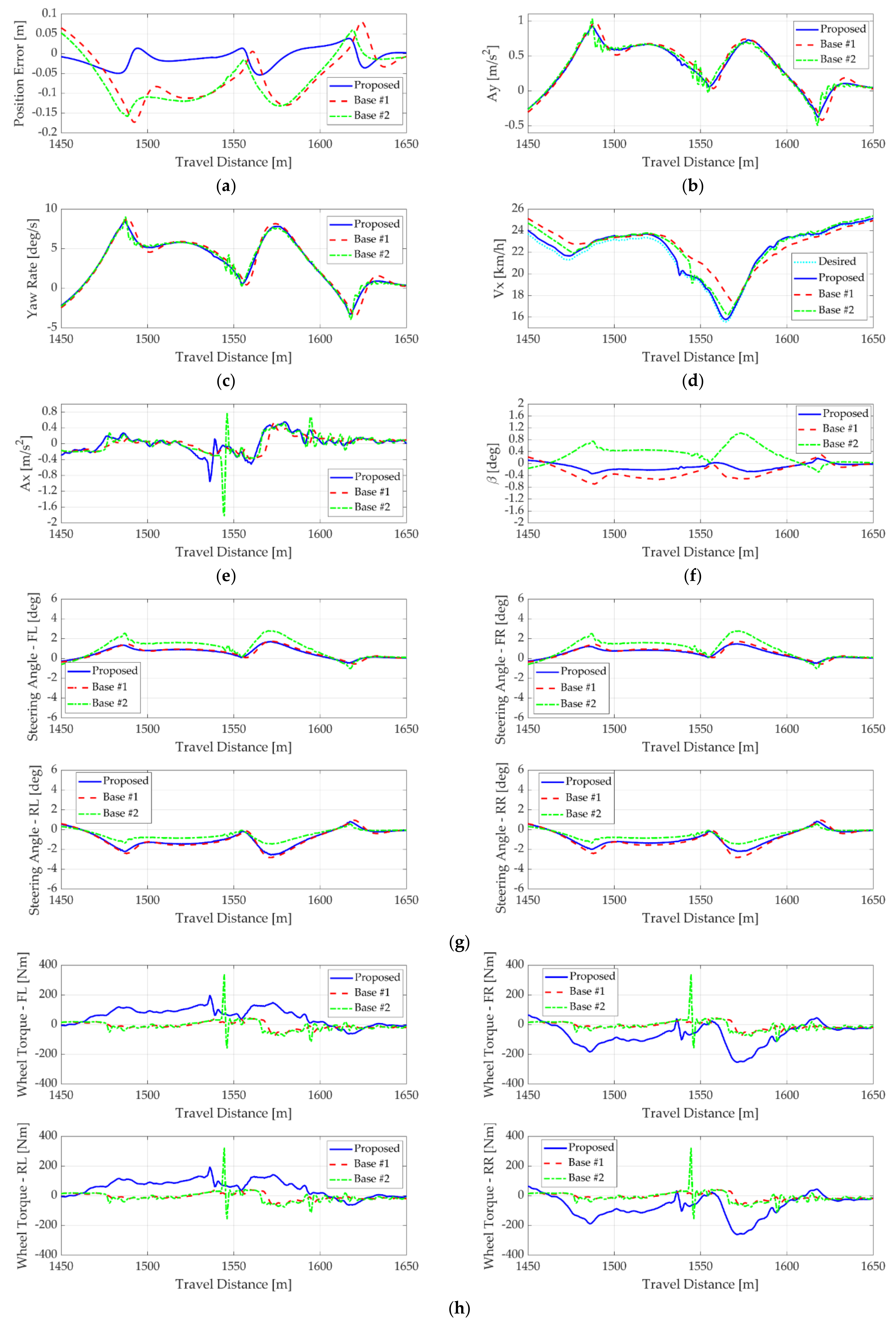
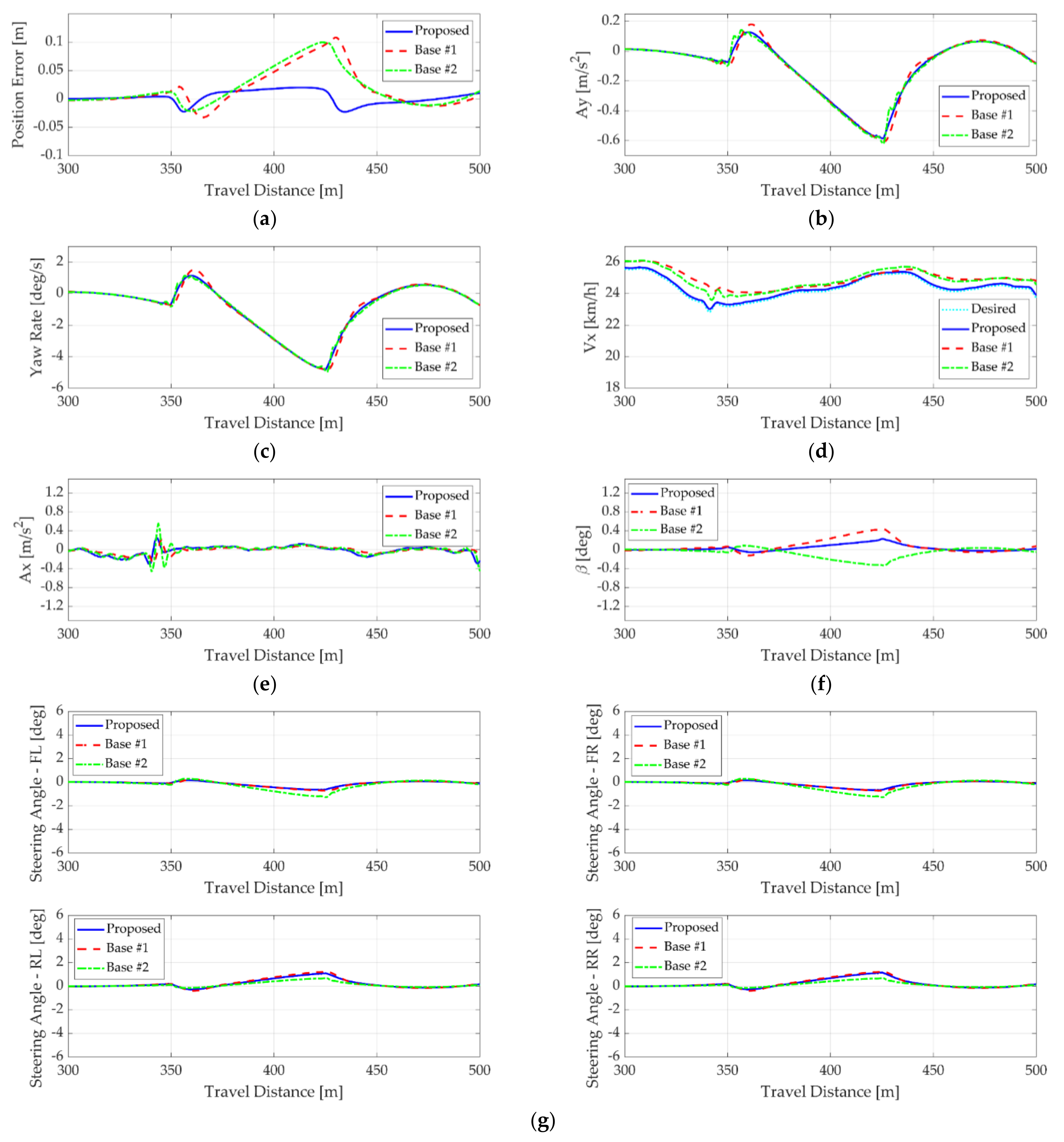
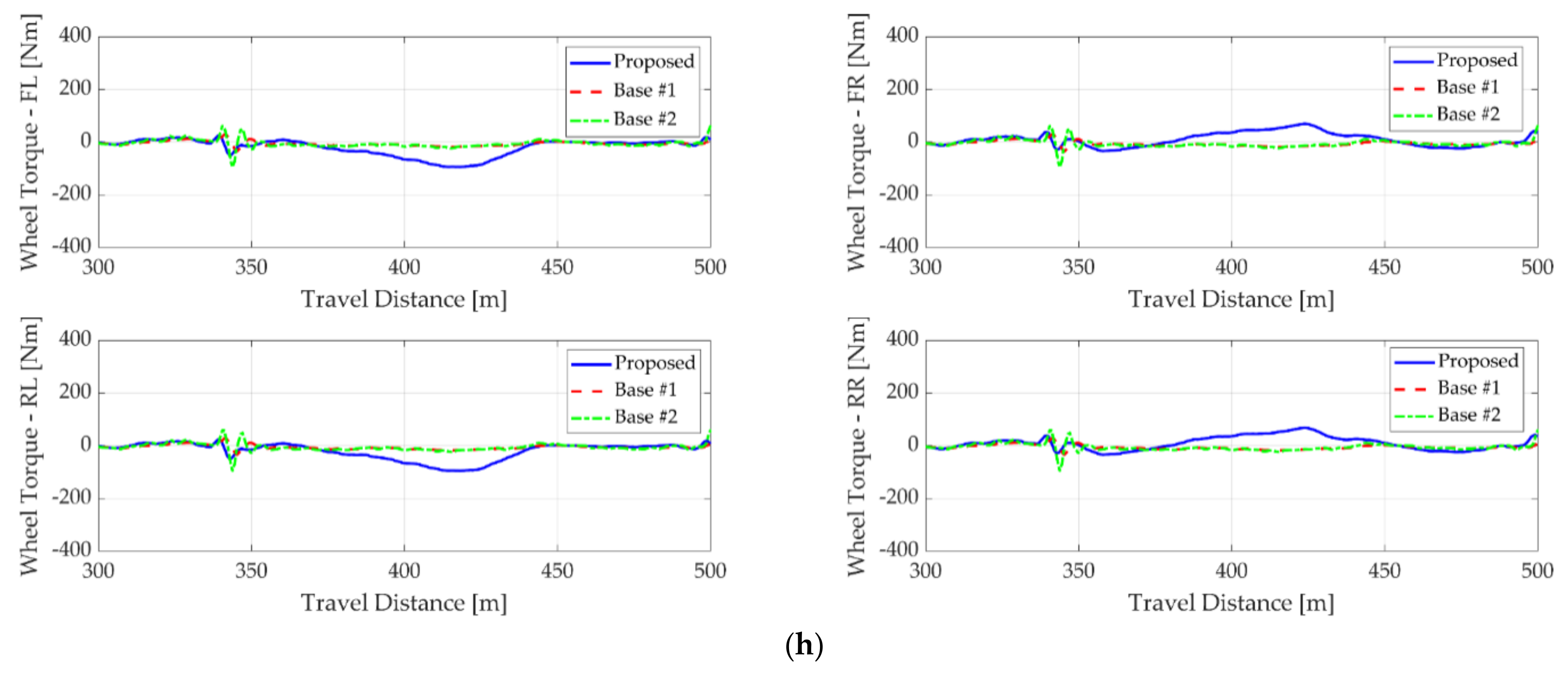
5.3. Simulation Results
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Paden, B.; Cap, M.; Yong, S.Z.; Yershov, D.; Frazzoli, E. A Survey of Motion Planning and Control Techniques for Self-Driving Urban Vehicles. IEEE Trans. Intell. Veh. 2016, 1, 33–55. [Google Scholar] [CrossRef] [Green Version]
- Yurtsever, E.; Lambert, J.; Carballo, A.; Takeda, K. A survey of autonomous driving: Common practices and emerging technologies. IEEE Access 2020, 8, 58443–58469. [Google Scholar] [CrossRef]
- Aguiar, A.; Dos Santos, F.; Cunha, J.; Sobreira, H.; Sousa, A. Localization and Mapping for Robots in Agriculture and Forestry: A Survey. Robotics 2020, 9, 97. [Google Scholar] [CrossRef]
- Wang, J.; Wang, R.; Jing, H.; Chen, N. Coordinated Active Steering and Four-Wheel Independently Driving/Braking Control with Control Allocation. Asian J. Control 2015, 18, 98–111. [Google Scholar] [CrossRef]
- Chen, X.; Peng, Y.; Hang, P.; Tang, T. Path tracking control of four-wheel independent steering electric vehicles based on optimal control. In Proceedings of the 2020 39th Chinese Control Conference (CCC), Shenyang, China, 27–29 July 2020; pp. 5436–5442. [Google Scholar]
- Hang, P.; Chen, X.; Luo, F. LPV/H∞ Controller Design for Path Tracking of Autonomous Ground Vehicles Through Four-Wheel Steering and Direct Yaw-Moment Control. Int. J. Automot. Technol. 2019, 20, 679–691. [Google Scholar] [CrossRef]
- Hiraoka, T.; Nishihara, O.; Kumamoto, H. Automatic path-tracking controller of a four-wheel steering vehicle. Veh. Syst. Dyn. 2009, 47, 1205–1227. [Google Scholar] [CrossRef]
- Hu, C.; Wang, R.; Yan, F. Integral Sliding Mode-Based Composite Nonlinear Feedback Control for Path Following of Four-Wheel Independently Actuated Autonomous Vehicles. IEEE Trans. Transp. Electrif. 2016, 2, 221–230. [Google Scholar] [CrossRef]
- Tan, Q.; Dai, P.; Zhang, Z.; Katupitiya, J. MPC and PSO Based Control Methodology for Path Tracking of 4WS4WD Vehicles. Appl. Sci. 2018, 8, 1000. [Google Scholar] [CrossRef] [Green Version]
- Tan, Q.; Wang, X.; Taghia, J.; Katupitiya, J. Force control of two-wheel-steer four-wheel-drive vehicles using model predictive control and sequential quadratic programming for improved path tracking. Int. J. Adv. Robot. Syst. 2017, 14, 1729881417746295. [Google Scholar] [CrossRef] [Green Version]
- Park, K.; Joa, E.; Yi, K.; Yoon, Y. Rear-Wheel Steering Control for Enhanced Steady-State and Transient Vehicle Handling Characteristics. IEEE Access 2020, 8, 149282–149300. [Google Scholar] [CrossRef]
- Hang, P.; Chen, X. Integrated chassis control algorithm design for path tracking based on four-wheel steering and direct yaw-moment control. Proc. Inst. Mech. Eng. Part I J. Syst. Control. Eng. 2019, 233, 625–641. [Google Scholar] [CrossRef]
- Yim, S.; Park, Y.; Yi, K. Design of active suspension and electronic stability program for rollover prevention. Int. J. Automot. Technol. 2010, 11, 147–153. [Google Scholar] [CrossRef]
- Woo, S.; Cha, H.; Yi, K.; Jang, S. Active Differential Control for Improved Handling Performance of Front-Wheel-Drive High-Performance Vehicles. Int. J. Automot. Technol. 2021, 22, 537–546. [Google Scholar] [CrossRef]
- Kim, K.; Kim, B.; Lee, K.; Ko, B.; Yi, K. Design of Integrated Risk Management-Based Dynamic Driving Control of Automated Vehicles. IEEE Intell. Transp. Syst. Mag. 2017, 9, 57–73. [Google Scholar] [CrossRef]
- Yoo, J.M.; Jeong, Y.; Yi, K. Virtual Target-Based Longitudinal Motion Planning of Autonomous Vehicles at Urban Intersections: Determining Control Inputs of Acceleration with Human Driving Characteristic-Based Constraints. IEEE Veh. Technol. Mag. 2021, 16, 38–46. [Google Scholar] [CrossRef]
- Snider, J.M. Automatic Steering Methods for Autonomous Automobile Path Tracking; CMU-RITR-09-08; Robotics Institute: Pittsburgh, PA, USA, 2009. [Google Scholar]
- Wang, W.-J.; Hsu, T.-M.; Wu, T.-S. The improved pure pursuit algorithm for autonomous driving advanced system. In Proceedings of the 2017 IEEE 10th International Workshop on Computational Intelligence and Applications, Hiroshima, Japan, 11–12 November 2017; pp. 33–38. [Google Scholar]
- Elbanhawi, M.; Simic, M.; Jazar, R. Receding horizon lateral vehicle control for pure pursuit path tracking. J. Vib. Control 2016, 24, 619–642. [Google Scholar] [CrossRef]
- Amer, N.H.; Zamzuri, H.; Hudha, K.; Aparow, V.R.; Abd Kadir, Z.; Abidin, A.F.Z. Path tracking controller of an autonomous armoured vehicle using modified Stanley controller optimized with particle swarm optimization. J. Braz. Soc. Mech. Sci. Eng. 2018, 40, 104. [Google Scholar] [CrossRef]
- Piao, C.; Liu, X.; Lu, C. Lateral control using parameter self-tuning LQR on autonomous vehicle. In Proceedings of the 2019 International Conference on Intelligent Computing, Automation and Systems, Chongqing, China, 6–8 December 2019; pp. 913–917. [Google Scholar]
- Zhang, C.; Hu, J.; Qiu, J.; Yang, W.; Sun, H.; Chen, Q. A Novel Fuzzy Observer-Based Steering Control Approach for Path Tracking in Autonomous Vehicles. IEEE Trans. Fuzzy Syst. 2018, 27, 278–290. [Google Scholar] [CrossRef]
- Raffo, G.; Gomes, G.K.; Normey-Rico, J.E.; Kelber, C.R.; Becker, L.B. A Predictive Controller for Autonomous Vehicle Path Tracking. IEEE Trans. Intell. Transp. Syst. 2009, 10, 92–102. [Google Scholar] [CrossRef]
- Sun, C.; Zhang, X.; Xi, L.; Tian, Y. Design of a Path-Tracking Steering Controller for Autonomous Vehicles. Energies 2018, 11, 1451. [Google Scholar] [CrossRef] [Green Version]
- Bai, G.; Meng, Y.; Liu, L.; Luo, W.; Gu, Q.; Li, K. A New Path Tracking Method Based on Multilayer Model Predictive Control. Appl. Sci. 2019, 9, 2649. [Google Scholar] [CrossRef] [Green Version]
- Jiang, L.; Wang, Y.; Wang, L.; Wu, J. Path tracking control based on Deep reinforcement learning in Autonomous driving. In Proceedings of the 2019 3rd Conference on Vehicle Control and Intelligence, Hefei, China, 21–22 September 2019; pp. 1–6. [Google Scholar]
- Song, S.; Chen, H.; Sun, H.; Liu, M. Data Efficient Reinforcement Learning for Integrated Lateral Planning and Control in Automated Parking System. Sensors 2020, 20, 7297. [Google Scholar] [CrossRef] [PubMed]
- Kamran, D.; Zhu, J.; Lauer, M. Learning path tracking for real car-like mobile robots from simulation. In Proceedings of the 2019 European Conference on Mobile Robots, Prague, Czech Republic, 4–6 September 2019; pp. 1–6. [Google Scholar]
- Yan, W.; Li, C.; Huang, Y.; Yang, L. Smart Longitudinal Velocity Control of Autonomous Vehicles in Interactions with Distracted Human-Driven Vehicles. IEEE Access 2019, 7, 168060–168074. [Google Scholar] [CrossRef]
- Bianco, C.G.L.; Romano, M. Optimal velocity planning for autonomous vehicles considering curvature constraints. In Proceedings of the 2007 IEEE International Conference on Robotics and Automation, Rome, Italy, 10–14 April 2007; pp. 2706–2711. [Google Scholar]
- Lefevre, S.; Carvalho, A.; Borrelli, F. A Learning-Based Framework for Velocity Control in Autonomous Driving. IEEE Trans. Autom. Sci. Eng. 2015, 13, 32–42. [Google Scholar] [CrossRef]
- Alfi, A.; Farrokhi, M. Hybrid state-feedback sliding-mode controller using fuzzy logic for four-wheel-steering vehicles. Veh. Syst. Dyn. 2009, 47, 265–284. [Google Scholar] [CrossRef]
- Chen, C.; Jia, Y.; Du, J.; Yu, F. Lane keeping control for autonomous 4WS4WD vehicles subject to wheel slip constraint. In Proceedings of the 2012 American Control Conference, Montreal, QC, Canada, 27–29 June 2012; pp. 6515–6520. [Google Scholar]
- Enache, N.M.; Guegan, S.; Desnoyer, F.; Vorobieva, H. Lane keeping and lane departure avoidance by rear wheels steering. In Proceedings of the 2012 IEEE Intelligent Vehicles Symposium, Madrid, Spain, 3–7 June 2012; pp. 359–364. [Google Scholar]
- Oya, M.; Wang, Q. Adaptive lane keeping controller for four-wheel-steering vehicles. In Proceedings of the 2007 IEEE International Conference on Control and Automation, Guangzhou, China, 30 May–1 June 2007; pp. 1942–1947. [Google Scholar]
- Galvani, M.; Biral, F.; Nguyen, B.M.; Fujimoto, H. Four wheel optimal autonomous steering for improving safety in emergency collision avoidance manoeuvres. In Proceedings of the 2014 IEEE 13th international Workshop on Advanced Motion Control, Yokohama, Japan, 14–16 March 2014; pp. 362–367. [Google Scholar]
- Raksincharoensak, P.; Nagai, M.; Mouri, H. Investigation of automatic path tracking control using four-wheel steering vehicle. In Proceedings of the IEEE International Vehicle Electronics Conference 2001, Tottori, Japan, 25–28 September 2001; pp. 73–77. [Google Scholar]
- Hu, C.; Wang, R.; Yan, F.; Chen, N. Output constraint control on path following of four-wheel independently actuated autonomous ground vehicles. IEEE Trans. Veh. Technol. 2015, 65, 4033–4043. [Google Scholar] [CrossRef]
- Shu, P.; Sagara, S.; Wang, Q.; Oya, M. Improved adaptive lane-keeping control for four-wheel steering vehicles without lateral velocity measurements. Int. J. Robust Nonlinear Control 2017, 27, 4154–4168. [Google Scholar] [CrossRef]
- Yoshida, Y.; Wang, Q.; Oya, M.; Okumura, K. Adaptive longitudinal velocity and lane keeping control of four-wheel-steering vehicles. In Proceedings of the SICE Annual Conference 2007, Takamatsu, Japan, 17–20 September 2007; pp. 1305–1310. [Google Scholar]
- Wu, J.; Wang, Z.; Zhang, L. Unbiased-estimation-based and computation-efficient adaptive MPC for four-wheel-independently-actuated electric vehicles. Mech. Mach. Theory 2020, 154, 104100. [Google Scholar] [CrossRef]
- Ding, X.; Wang, Z.; Zhang, L. Hybrid Control-Based Acceleration Slip Regulation for Four-Wheel-Independent-Actuated Electric Vehicles. IEEE Trans. Transp. Electrif. 2021, 7, 1976–1989. [Google Scholar] [CrossRef]
- Solea, R.; Filipescu, A.; Filipescu, S.; Dumitrascu, B. Sliding-mode controller for four-wheel-steering vehicle: Trajectory-tracking problem. In Proceedings of the 2010 8th World Congress on Intelligent Control and Automation, Jinan, China, 7–9 July 2010; pp. 1185–1190. [Google Scholar]
- Hu, C.; Qin, Y.; Cao, H.; Song, X.; Jiang, K.; Rath, J.J.; Wei, C. Lane keeping of autonomous vehicles based on differential steering with adaptive multivariable super-twisting control. Mech. Syst. Signal Process. 2019, 125, 330–346. [Google Scholar] [CrossRef]
- Kasahara, M.; Kanai, Y.; Mori, Y. Adjust method of nonlinear gain in four-wheel steering control using Sliding Mode Control. In Proceedings of the 2009 4th IEEE Conference on Industrial Electronics and Applications, Xi’an, China, 25–27 May 2009; pp. 608–613. [Google Scholar]
- Wang, R.; Yin, G.; Jin, X. Robust adaptive sliding mode control for nonlinear four-wheel steering autonomous Vehicles path tracking systems. In Proceedings of the 2016 IEEE 8th International Power Electronics and Motion Control Conference, Hefei, China, 22–26 May 2016; pp. 2999–3006. [Google Scholar]
- Hang, P.; Luo, F.; Fang, S.; Chen, X. Path tracking control of a four-wheel-independent-steering electric vehicle based on model predictive control. In Proceedings of the 2017 36th Chinese Control Conference (CCC), Dalian, China, 26–28 July 2017; pp. 9360–9366. [Google Scholar]
- Fnadi, M.; Plumet, F.; Benamar, F. Model predictive control based dynamic path tracking of a four-wheel steering mobile robot. In Proceedings of the 2019 IEEE/RSJ International Conference on Intelligent Robots and Systems, Macau, China, 3–8 November 2019; pp. 4518–4523. [Google Scholar]
- Liang, Y.; Li, Y.N.; Khajepour, A.; Zheng, L. Holistic Adaptive Multi-Model Predictive Control for the Path Following of 4WID Autonomous Vehicles. IEEE Trans. Veh. Technol. 2021, 70, 69–81. [Google Scholar] [CrossRef]
- Wu, H.; Li, Z.; Si, Z. Trajectory tracking control for four-wheel independent drive intelligent vehicle based on model predictive control and sliding mode control. Adv. Mech. Eng. 2020, 13, 16878140211045142. [Google Scholar] [CrossRef]
- Yu, Y.; Li, Y.; Liang, Y.; Zheng, L.; Ren, Y. Decoupling motion tracking control for 4WD autonomous vehicles based on the path correction. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2021, 09544070211015928. [Google Scholar] [CrossRef]
- An, Q.; Cheng, S.; Li, C.; Li, L.; Peng, H. Game Theory-Based Control Strategy for Trajectory Following of Four-Wheel Independently Actuated Autonomous Vehicles. IEEE Trans. Veh. Technol. 2021, 70, 2196–2208. [Google Scholar] [CrossRef]
- Liu, C.; Lee, S.; Varnhagen, S.; Tseng, H.E. Path planning for autonomous vehicles using model predictive control. In Proceedings of the 2017 IEEE Intelligent Vehicles Symposium, Los Angeles, CA, USA, 11–14 June 2017; pp. 174–179. [Google Scholar]
- Baskar, L.D.; De Schutter, B.; Hellendoorn, H. Model-based predictive traffic control for intelligent vehicles: Dynamic speed limits and dynamic lane allocation. In Proceedings of the 2008 IEEE Intelligent Vehicles Symposium, Eindhoven, The Netherlands, 4–6 June 2008; pp. 174–179. [Google Scholar]
- Li, D.-Y.; Song, Y.-D.; Huang, D.; Chen, H.-N. Model-Independent Adaptive Fault-Tolerant Output Tracking Control of 4WS4WD Road Vehicles. IEEE Trans. Intell. Transp. Syst. 2012, 14, 169–179. [Google Scholar] [CrossRef]
- Jung, C.; Kim, H.; Son, Y.; Lee, K.; Yi, K. Parameter adaptive steering control for autonomous driving. In Proceedings of the 17th International IEEE Conference on Intelligent Transportation Systems, Qingdao, China, 8–11 October 2014; pp. 1462–1467. [Google Scholar]
- Hermand, E.; Nguyen, T.W.; Hosseinzadeh, M.; Garone, E. Constrained control of UAVs in geofencing applications. In Proceedings of the 2018 26th Mediterranean Conference on Control and Automation, Zadar, Croatia, 19–22 June 2018; pp. 217–222. [Google Scholar]
- Kim, B.; Kim, D.; Park, S.; Jung, Y.; Yi, K. Automated Complex Urban Driving based on Enhanced Environment Representation with GPS/map, Radar, Lidar and Vision. IFAC-PapersOnLine 2016, 49, 190–195. [Google Scholar] [CrossRef]
- Jeong, Y. Self-Adaptive Motion Prediction-Based Proactive Motion Planning for Autonomous Driving in Urban Environments. IEEE Access 2021, 9, 105612–105626. [Google Scholar] [CrossRef]
- Kim, B.; Yi, K. Probabilistic and Holistic Prediction of Vehicle States Using Sensor Fusion for Application to Integrated Vehicle Safety Systems. IEEE Trans. Intell. Transp. Syst. 2014, 15, 2178–2190. [Google Scholar] [CrossRef]
- Chen, W.-H.; O’Reilly, J.; Ballance, D. Model predictive control of nonlinear systems: Computational burden and stability. IEE Proc. Control Theory Appl. 2000, 147, 387–394. [Google Scholar] [CrossRef] [Green Version]
- Kim, H.; Yi, K. Combined throttle and brake control for vehicle cruise control: A model free approach. In Proceedings of the 2013 IEEE Intelligent Vehicles Symposium (IV), Gold Coast, Australia, 23–26 June 2013; pp. 859–864. [Google Scholar]
- Mattingley, J.; Boyd, S. CVXGEN: A code generator for embedded convex optimization. Optim. Eng. 2011, 13, 1–27. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbol | Values | Symbol | Values |
|---|---|---|---|
| Np | 20 steps | vx,min | 0 m/s |
| Qvx | 1 | vx,max | 20 m/s |
| Qvy | 2 | vy,man | 1 m/s |
| Qγ | 40 | δmax | 30 deg |
| Rδ | 0.1 | δ′max | 90 deg/s |
| RFx | 0.001 | Fx,max | 1000 N |
| γmax | 20 deg/s | F′x,max | 4000 N/s |
| Symbol | Definition | Values |
|---|---|---|
| M | Vehicle Mass | 1370 kg |
| lf | Distance of the front axle to the center of gravity | 1.110 m |
| lr | Distance of the rear axle to the center of gravity | 1.666 m |
| Iz | Vehicle yaw inertia | 4192 kgm2 |
| tw | Vehicle track width | 1.795 m |
| Cf | Cornering stiffness of the front tires | 77,388 N/rad |
| Cr | Cornering stiffness of the rear tires | 77,388 N/rad |
| Np | Step of prediction horizon | 20 |
| ΔT | Sampling time of MPC | 0.1 s |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jeong, Y.; Yim, S. Model Predictive Control-Based Integrated Path Tracking and Velocity Control for Autonomous Vehicle with Four-Wheel Independent Steering and Driving. Electronics 2021, 10, 2812. https://doi.org/10.3390/electronics10222812
Jeong Y, Yim S. Model Predictive Control-Based Integrated Path Tracking and Velocity Control for Autonomous Vehicle with Four-Wheel Independent Steering and Driving. Electronics. 2021; 10(22):2812. https://doi.org/10.3390/electronics10222812
Chicago/Turabian StyleJeong, Yonghwan, and Seongjin Yim. 2021. "Model Predictive Control-Based Integrated Path Tracking and Velocity Control for Autonomous Vehicle with Four-Wheel Independent Steering and Driving" Electronics 10, no. 22: 2812. https://doi.org/10.3390/electronics10222812
APA StyleJeong, Y., & Yim, S. (2021). Model Predictive Control-Based Integrated Path Tracking and Velocity Control for Autonomous Vehicle with Four-Wheel Independent Steering and Driving. Electronics, 10(22), 2812. https://doi.org/10.3390/electronics10222812