1. Introduction
In operations research, extremum problems are typically addressed under the assumption that all components are deterministic real numbers. However, real-world applications across various fields such as industry, engineering, physics, machine learning, data analytics, finance and risk management, medicine, and control theory often involve data that are imprecise and ambiguous. This necessitates optimization problems where the parameters are not precisely known, introducing inherent uncertainty in the modelling process. Several methodologies exist to investigate and solve uncertain optimization problems, interval optimization being one of them. Instead of real numbers, intervals are used to represent uncertainty. Interval-valued optimization problems specifically address situations where uncertain parameters are expressed as closed intervals in both the objective functions and constraints. Significant advancements in this area were made by Moore [
1,
2,
3] by introducing foundational concepts and methods in interval analysis. Alfred and Herzberger [
4] focused on the theory and practice of interval programming, which is used to ensure that uncertainty and error margins are permanent in extended programming, along with the basic principle and summary of interval programming. Charnes et al. [
5] explored linear programming problems with constraints represented by closed intervals, while Ishibuchi and Tanaka [
6] dealt with interval-valued objective functions without interval uncertainty in the constraints. Due to the development of interval analysis, many researchers (see, for example, [
7,
8,
9,
10,
11,
12,
13]) have proposed various approaches to solve interval-valued optimization problems. Pereira [
14] explained how the control design system for autonomous vehicles can be developed using optimization methods.
The concept of invexity, especially interval-valued symmetric invexity, plays a vital role in solving interval optimization problems. Guo et al. [
15] developed new methods for addressing non-smooth interval optimization problems based on this concept. Moreover, Saeed and Treanţă [
16] contributed significantly by introducing new classes of interval-valued variational problems and inequalities. Recently, Antczak [
9] applied the weighting method to nonlinear vector optimization problems with multiple interval-valued objectives, demonstrating that an optimal solution to the associated scalar weighting problem is equivalent to a weak Pareto solution for the original nonlinear interval-valued multi-objective programming problem under appropriate convexity assumptions. Other important studies in the literature have focused on interval-valued variational problems and their optimality conditions. Debnath and Pokharna [
17] analyzed the optimality and duality in interval-valued variational problems with
B-
-invexity. In this context, researchers like Giannessi [
18] and Giorgi [
19] have provided crucial insights into theorems of the alternative and optimality conditions. Treanţă [
20,
21] defined KT-pseudoinvex variational control problems with interval values and investigated the connections between
-optimal solutions and the saddle points associated with interval-valued Lagrange functionals. Treanţă and Ciontescu [
22] made a notable contribution by studying optimal control problems with generalized invariant convex interval-valued functionals. Additionally, they explored the connections between such problems and related inequalities in variational control problems (see [
23]). Other connected ideas on this topic can be read in Kumar and Yao [
24] and Tang and Hua [
25].
Motivated by all these works, in this paper, we employ the weighting technique for a new family of multiple cost interval-valued control problems. Namely, by constructing an associated scalar weighting extremization problem and applying appropriate convexity hypotheses, we establish the equivalence between weakly -efficient solutions and -efficient solutions in the original problem and the associated scalar weighting extremization problem. Moreover, these results are illustrated with a suitable example of a convex two-cost interval-valued extremization problem. Based on this illustrative example, performing a comparative analysis of the results obtained using the weighting technique versus traditional optimization methods, we can easily conclude the effectiveness of the weighting technique in solving multiple cost optimization problems, that is, the conversion of a vector problem to a scalar one.
2. Preliminary Results
This section focuses on basic definitions, notations, and basic calculus in interval analyses, which are used in the following sections. In this regard, let be the classical Euclidean space of dimension r, together with its non-negative orthant, denoted by . For any vectors , and in we define:
- (i)
;
- (ii)
;
- (iii)
;
- (iv)
and .
where is an index set. We consider as a compact real interval, K as a family of piecewise smooth functions (state variable), and Y as the family of all piecewise continuous functions (control variables). Furthermore, we consider and as vector-valued functionals that possess continuous differentiability concerning each of their inputs. The functional is defined for an independent variable , with as a n-dimensional piecewise smooth function of (, which denotes the derivative of with respect to ), and as a s-dimensional piecewise continuous function of . To make the notation less complex, we will denote , and as , and , respectively. If , are the components of the above-mentioned vector-valued function , the partial derivatives of with respect to , and y are denoted as , and , respectively. More precisely, and are defined as the vectors and , respectively. Similarly, the first-order partial derivatives , and of the vector-valued functionals g and h, respectively, can be expressed using matrices with m/n rows instead of a single row.
Consider the family of all compact (bounded and closed) real intervals. Further, when we refer to a compact real interval, we represent it as , where and represent the lower and upper bounds of , respectively. To clarify, if , then . If , then is a real number. Let , and in . Then, by definition, we have:
- (a)
and ,
- (b)
,
- (c)
and ,
- (d)
, where is a real number,
- (e)
where is a real number.
Interval analysis (see, for example, Moore [
1,
2], Moore et al. [
3], and Alefeld and Herzberger [
4]) commonly uses an order relation to establish a ranking among real intervals. This fact means that one interval is superior to another, but it does not imply that one is larger than the other. Thus, for
, and
in
, we write
The fact that
is a partial ordering on
is readily apparent. This implies that
is inferior to
, or
is superior to
. Moreover,
can be expressed if and only if
and
, or, equivalently
A vector of compact real intervals, denoted as , is defined as a vector where each component is a compact real interval . Denote using the family of all vectors of compact real intervals. For two vectors of the compact real intervals, , and , we will use the notation to indicate that , for all . Similarly, we will use to indicate that , for all and for at least one .
Now, we will formulate the convexity concept associated with an interval-valued controlled functional. In particular, we use the very straightforward concept of convexity introduced by Wu [
26].
Definition 1. Let be defined bywith and continuously differentiable functionals. Then, is said to be a convex interval-valued controlled functional on if the inequalitieshold for all . The alternative lemma presented below is a specific case of the more general results established in Giannessi [
18] and Giorgi [
19] for convex vector optimization problems.
Lemma 1. Let be a convex set and and be convex interval-valued controlled functionals. If the systemhas no solution, then there exist , where , and , where , such that 3. Main Results
In this section, we investigate the following multi-cost interval-valued extremization problem formulated as follows
where
for each
,
are given, and
and
are
-class functionals. Let
be the set of all
feasible solutions in (P).
The optimal solutions for multiple objective interval-valued extremization problems are defined in terms of weakly -efficient and -efficient solutions, as below.
Definition 2. A feasible solution is said to be a weakly -efficient solution of (P) if and only if there exists no other such that Definition 3. A feasible solution is said to be a -efficient solution of (P) if and only if there exists no other such that In this section, to investigate a weakly
-efficient solution and/or a
-efficient solution of (P), we use the weighting approach (see Antczak [
9]). Thus, for this purpose, an auxiliary weighting control problem is introduced for the considered multi-cost interval-valued extremization problem as follows:
where
, with
,
.
Definition 4. A feasible solution is said to be an optimal solution of if the inequalityholds for all . Theorem 1. Let be an optimal solution of . Further, assume that with for some . Then, is a weakly -efficient solution of (P).
Proof. By assumption,
is an optimal solution of
. We assume, on the contrary, that
is not a weakly
-efficient solution to (P). Therefore, according to Definition 2, it follows that there exists another
such that
According to the definition of the order relation
, it follows that, for any
, we have
Since
with
for some
, the above system of inequalities yields that the inequality
holds. This contradicts the assumption that
is an optimal solution of
. Hence,
is a weakly
-efficient solution of the considered control problem (P), which completes the proof of the Theorem 1. □
Theorem 2. Let be an optimal solution of . Further, assume that with and . Then, is an -efficient solution of (P).
Proof. By assumption,
is an optimal solution of
. We assume, contrary to the result, that
is not an
-efficient solution to (P). Therefore, according to Definition 3, it follows that there exists another
such that
According to the definition of the order relation
, it follows that, for any
, we have
According to the definition of the relation
, it follows that, for any
,
Since
with
and
, Equations (1) and (2) imply that the inequality
holds. This contradicts the assumption that
is an optimal solution of
. Hence,
is an
-efficient solution of (P), which completes the proof of the theorem. □
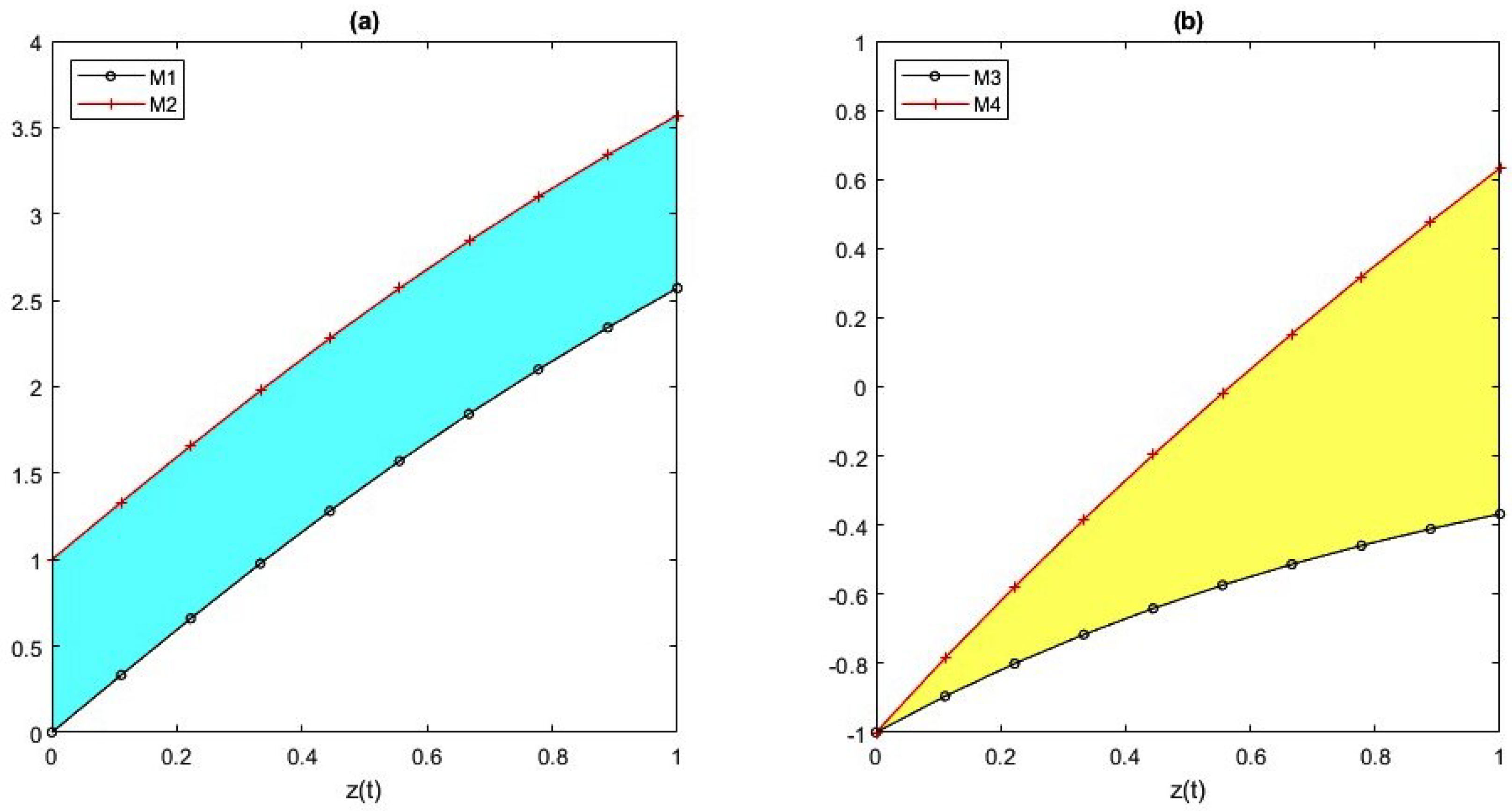
Now, we give an example of a multiple cost interval-valued extremization problem, which we solve using the weighting method to support our result established in Theorem 2.
Example 1. Let , and consider the following multi-cost interval-valued minimization problem (P1), defined as As it follows from the formulation of (P1), we have
We now use the weighting method for solving (P1). Let
and
. The associated auxiliary weighting control problem
is defined by
The set of all feasible solutions of
is given by
and
is an optimal solution in
. Further, since all the hypotheses of Theorem 2 are satisfied,
is an
-efficient solution of (P1) (see
Figure 1).
Remark 1. Based on the previous illustrative example, performing a comparative analysis of the results obtained using the weighting technique versus traditional optimization methods, we can easily conclude the effectiveness of the weighting technique in solving multiple cost optimization problems, that is, the conversion of a vector problem to a scalar one.
Now, under suitable convexity hypotheses, we prove the converse result to those established in Theorems 1 and 2.
Theorem 3. Let each objective functional , be a convex interval-valued controlled functional on the convex set . If is a weakly -efficient solution in (P), then there exists , where , such that is an optimal solution of the auxiliary weighting control problem .
Proof. Let
be a weakly
-efficient solution in (P). Then, according to Definition 2, there is no other feasible solution
such that
From the definition of the order relation
, it follows that, for every
, we have
By assumption, each objective functional
, is a convex interval-valued controlled functional on
. Then, by Definition 1, it follows that the functionals
and
, are convex on
. Since the system of inequalities (3) has no solution for
, consequently, by Lemma 1, there exist
with
such that the inequality
holds for all
. This means, by Definition 4, that
is an optimal solution of the auxiliary weighting control problem
, which completes the proof of this theorem 3. □




{kind=link}