
Simple Closed Quasigeodesics on Tetrahedra


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
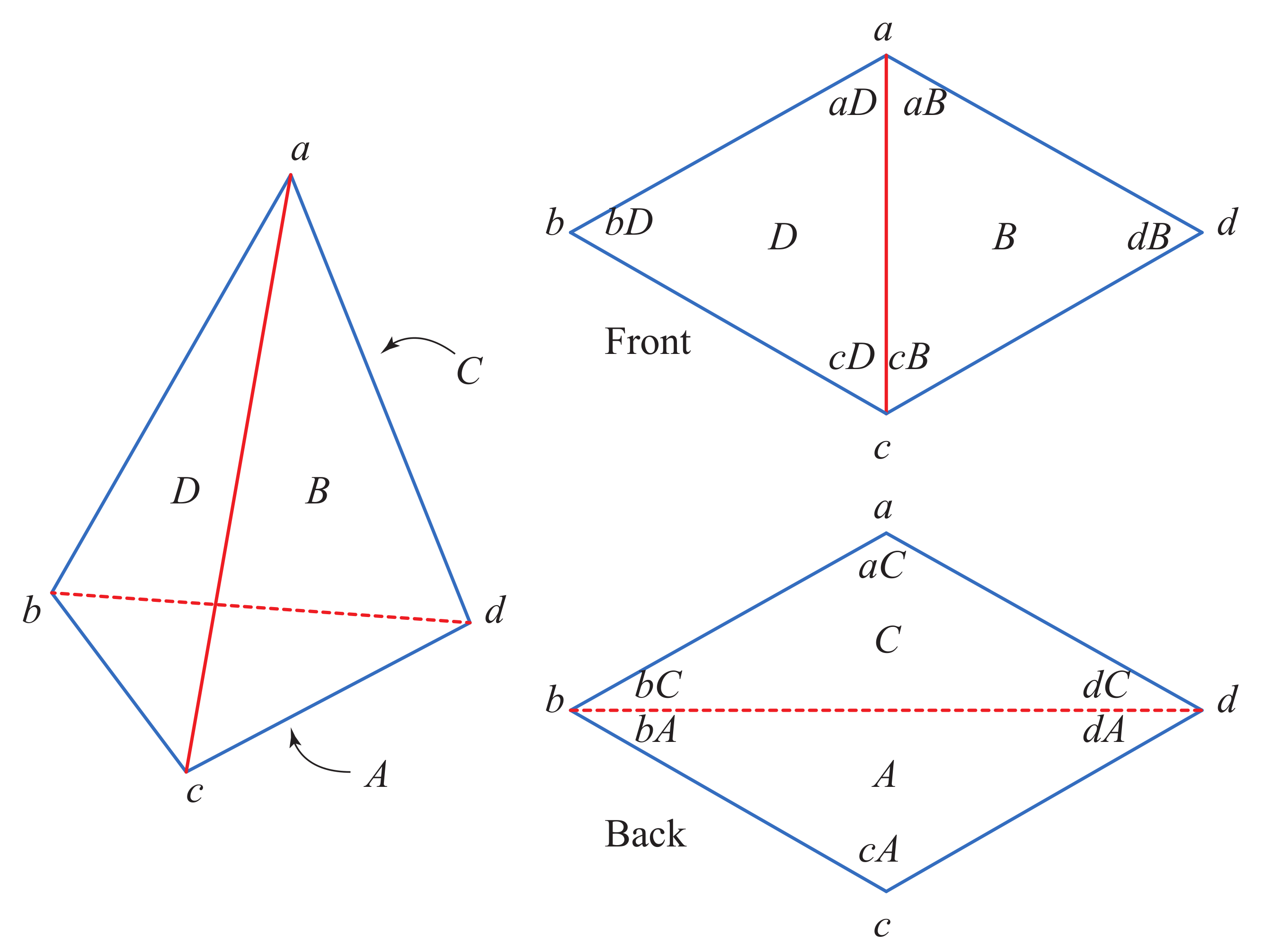
Notation
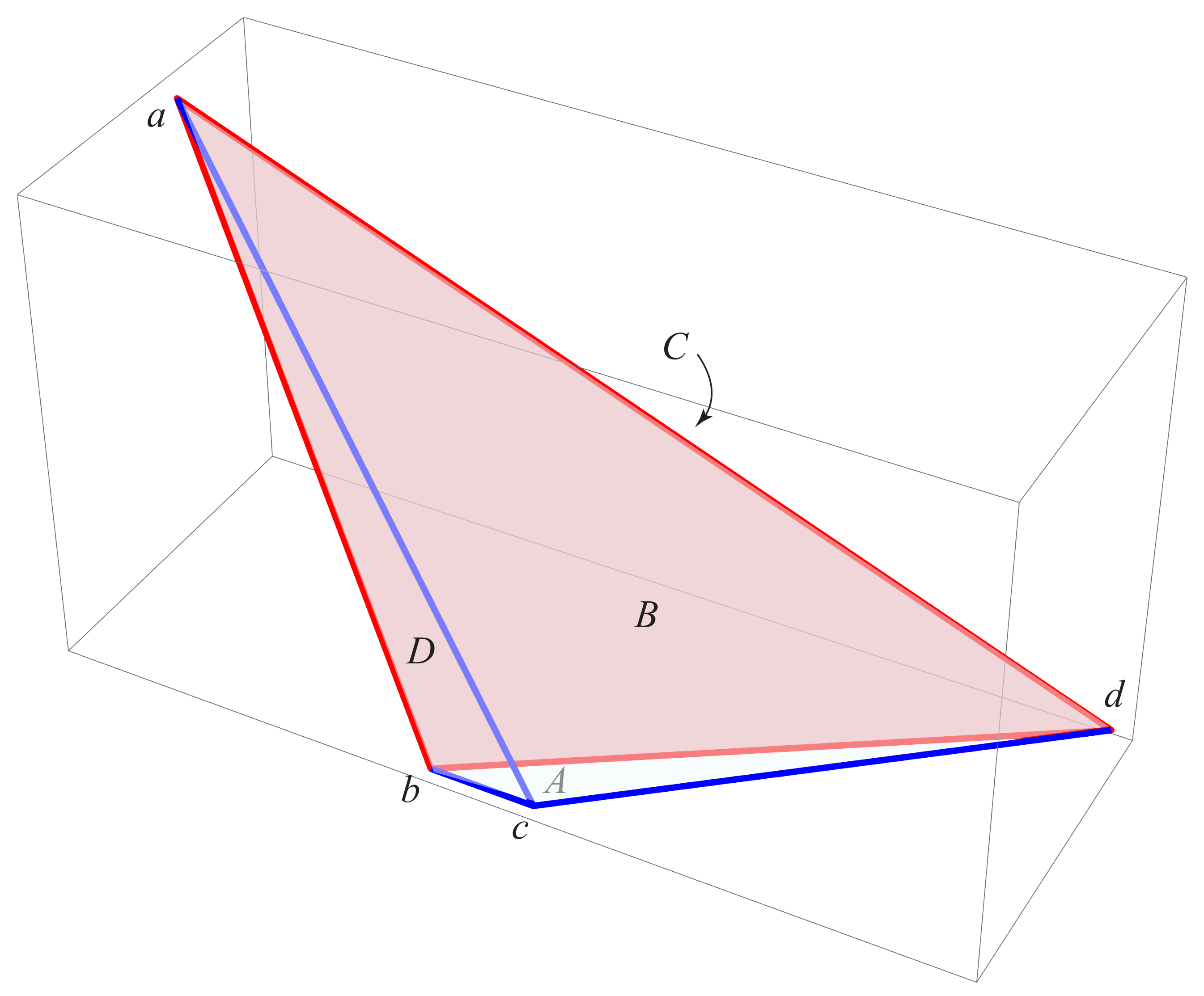
- Vertices of tetrahedron T: ;
- Face A is opposite a; So: , , , ;
- Face angles are specified by vertex and face. So the three face angles incident to vertex a are: ; etc. See Figure 1;
- Complete angle at a: ;
- Vertex curvature at a: .
2. : Simple Closed Geodesics
- 1.
- The total curvature at the four vertices sums to ;
- 2.
- The turn of a closed curve plus the curvature enclosed equals : .
3. : 1-Vertex Quasigeodesics
- Properties of .
- (1)
- Q must form a geodesic loop with loop point v.
- (2)
- To satisfy the Gauss–Bonnet theorem, Q must partition the other three vertices two to one side and one to the other, such that the total curvatures to each side of Q are at most (and not both sides equal to , for then there is no curvature at v and it is not a vertex).
- Sketch of Proof for Theorem 4.
3.1. Case 1
3.2. Case 2
- Case 2.1:
- Case 2.2:
- Case 2.2.1:
- Case 2.2.2:
- Case 2.2.3:
4. : 2-Vertex Quasigeodesics
4.1. Degenerate 2-Vertex Quasigeodesics
4.2. Star-Unfolding and Cut Locus
- Sketch of Proof for Theorem 5.
4.3. Visibility
- Case 1: Two a-images in one cone.
- Case 2: Two a-images in two different cones.
4.4. A Geometrical Interpretation of Edge Loops
5. : 3-Vertex Quasigeodesics
5.1. Preliminary Lemmas
- Example.
5.2. Case Analysis
- Case 1: 4 vertices.
- Case 2a: 2 vertices, .
- Case 2b: 2 vertices, .
- Case 3a: 3 vertices, double outside.
- Case 3b: 3 vertices, double inside.
6. Tetrahedra with Many
- We saw that a general tetrahedron has no ;
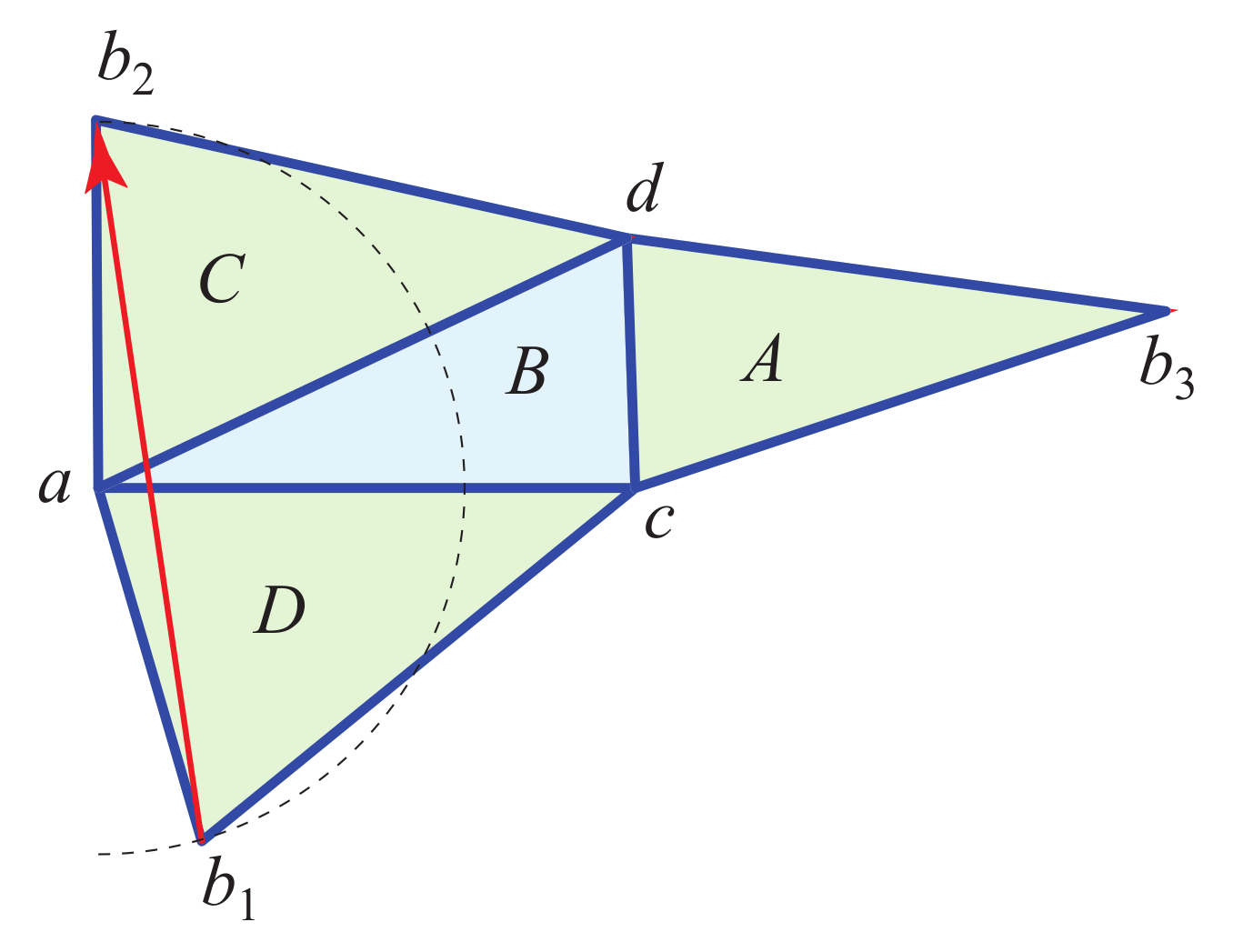
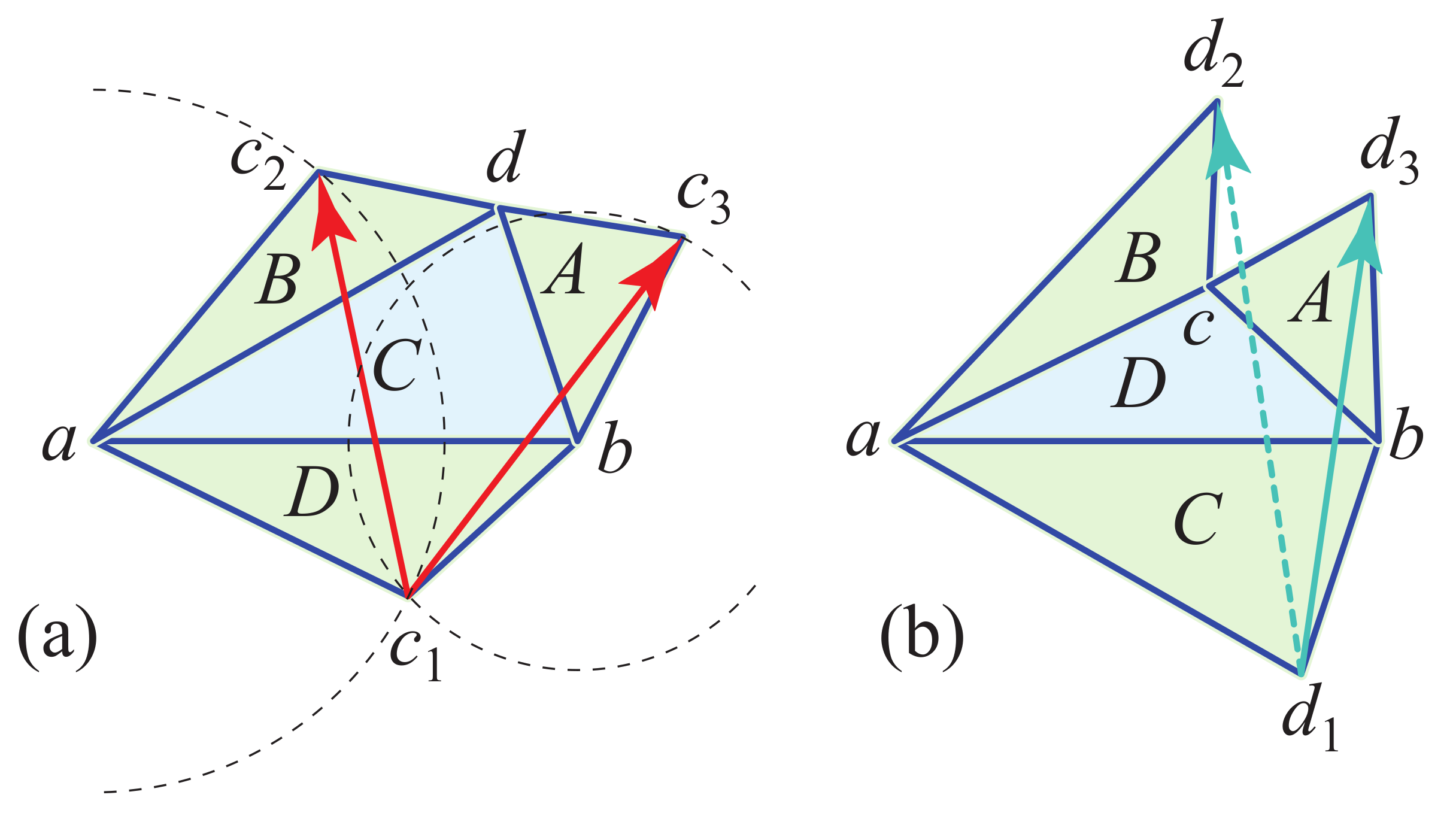
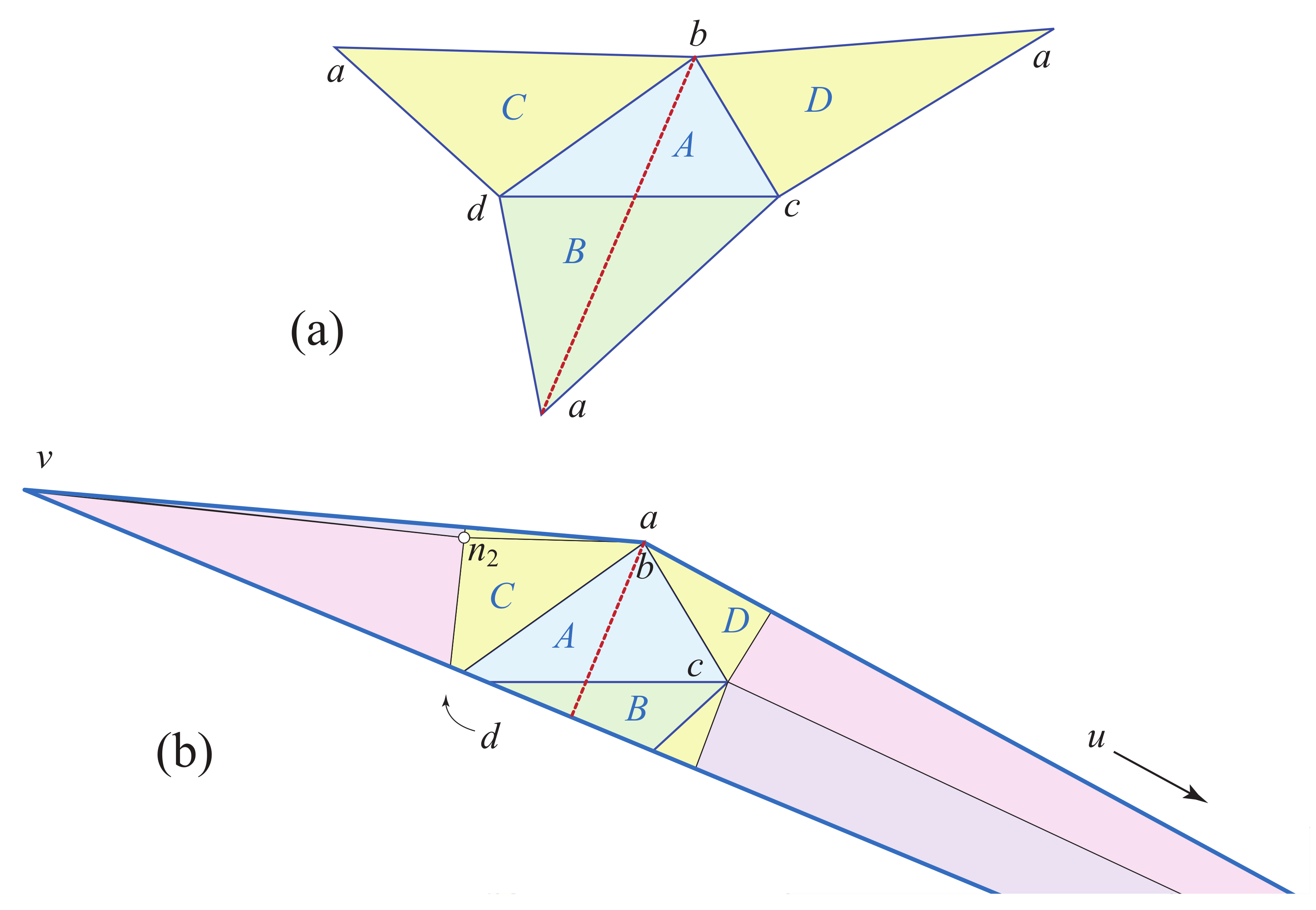
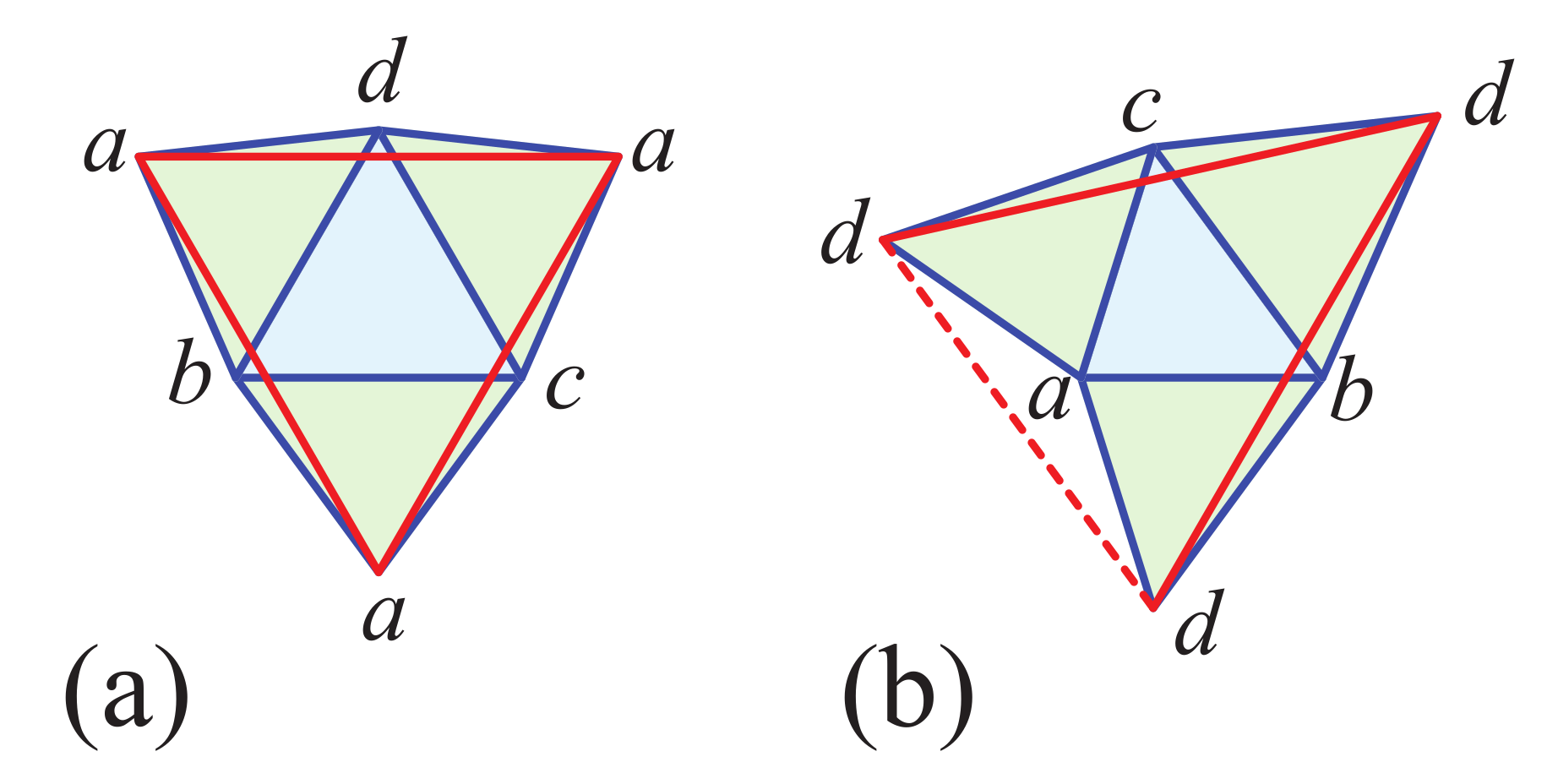
- There exists at least one on every tetrahedron. In fact, N has such quasigeodesics. To see this, consider the four star-unfoldings of N with respect to its vertices. Because of the symmetry of N, three of the unfoldings from the base vertices are isometric. See Figure 16. One can then check that through each base vertex pass two s, as represented in Figure 16b. On the other hand, the three geodesic loops through apex a, represented in Figure 16a, are not quasigeodesics;
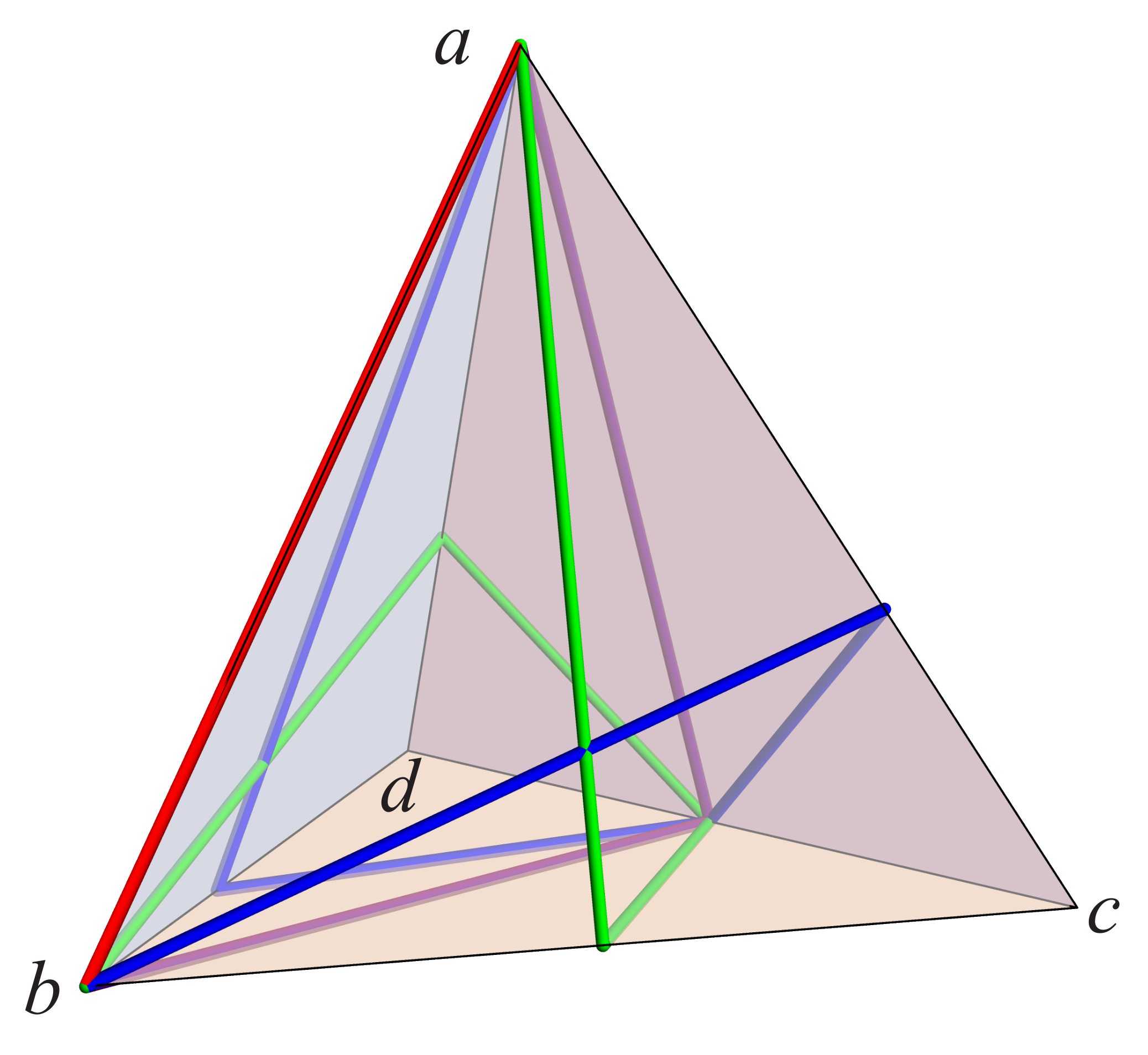
- Because N is chosen sufficiently close to a regular tetrahedron, Lemma 9 shows that every edge of N provides three non-degenerate s, as in Figure 17. The three vertices of curvatures provide three more degenerate ’s. They all sum up to s;
- The boundary of every face of N is a , because N is f-acute, hence there are such quasigeodesics;
- Every partition of the face set of N into two faces provides a , again because N is f-acute, hence there are s, namely corresponding to , , .
7. Remarks and Open Problems
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Pogorelov, A.V. Quasi-geodesic lines on a convex surface. Mat. Sb. 1949, 25, 275–306, English translation in Am. Math. Soc. Transl. 1952, 74. [Google Scholar]
- Demaine, E.D.; O’Rourke, J. Geometric Folding Algorithms: Linkages, Origami, Polyhedra; Cambridge University Press: Cambridge, UK, 2007; Available online: http://www.gfalop.org (accessed on 1 May 2022).
- Demaine, E.D.; Hesterberg, A.C.; Ku, J.S. Finding Closed Quasigeodesics on Convex Polyhedra. arXiv 2021, arXiv:2008.00589. [Google Scholar]
- Chartier, J.; de Mesmay, A. Finding weakly simple closed quasigeodesics on polyhedral spheres. Symp. Comput. Geom. To appear.
- O’Rourke, J.; Vîlcu, C. Reshaping Convex Polyhedra. arXiv 2021, arXiv:2107.03153. [Google Scholar]
- Protasov, V.Y. Closed geodesics on the surface of a simplex. Sb. Math. 2007, 198, 243. [Google Scholar] [CrossRef]
- Fuchs, D.B.; Fuchs, E. Closed geodesics on regular polyhedra. Mosc. Math. J. 2007, 7, 265–279. [Google Scholar] [CrossRef]
- Klingenberg, W.P. Riemannian Geometry; Walter de Gruyter: Berlin, Germany, 2011; Volume 1, p. 348. [Google Scholar]
- Davis, D.; Dods, V.; Traub, C.; Yang, J. Geodesics on the regular tetrahedron and the cube. Discret. Math. 2017, 340, 3183–3196. [Google Scholar] [CrossRef]
- Strantzen, J.; Lu, Y. Regular simple geodesic loops on a tetrahedron. Geom. Dedicata 1992, 42, 139–153. [Google Scholar] [CrossRef]
- Alexandrov, A.D. Die Innere Geometrie der Konvexen Flächen; Akademie-Verlag: Berlin, Germany, 1955. [Google Scholar]
- Gruber, P. A typical convex surface contains no closed geodesic. J. Reine Angew. Math. 1991, 416, 195–205. [Google Scholar]
- Gal’perin, G.A. Convex polyhedra without simple closed geodesics. Regul. Chaotic Dyn. 2003, 8, 45–58. [Google Scholar] [CrossRef]
- Akopyan, A.; Petrunin, A. Long geodesics on convex surfaces. Math. Intell. 2018, 40, 26–31. [Google Scholar] [CrossRef]
- Fuchs, D. Geodesics on regular polyhedra with endpoints at the vertices. Arnold Math. J. 2016, 2, 201–211. [Google Scholar] [CrossRef]
- Aronov, B.; O’Rourke, J. Nonoverlap of the star unfolding. Discret. Comput. Geom. 1992, 8, 219–250. [Google Scholar] [CrossRef]
- Agarwal, P.K.; Aronov, B.; O’Rourke, J.; Schevon, C.A. Star Unfolding of a Polytope with Applications. SIAM J. Comput. 1997, 26, 1689–1713. [Google Scholar] [CrossRef][Green Version]
- O’Rourke, J. Every Tetrahedron has a 3-vertex Quasigeodesic. arXiv 2022, arXiv:2109.07444. [Google Scholar]
- Rouyer, J.; Vîlcu, C. Sets of tetrahedra, defined by maxima of distance functions. Analele Univ. “Ovidius" Constanta-Seria Mat. 2012, 20, 197–212. [Google Scholar] [CrossRef]

















Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
O’Rourke, J.; Vîlcu, C. Simple Closed Quasigeodesics on Tetrahedra. Information 2022, 13, 238. https://doi.org/10.3390/info13050238
O’Rourke J, Vîlcu C. Simple Closed Quasigeodesics on Tetrahedra. Information. 2022; 13(5):238. https://doi.org/10.3390/info13050238
Chicago/Turabian StyleO’Rourke, Joseph, and Costin Vîlcu. 2022. "Simple Closed Quasigeodesics on Tetrahedra" Information 13, no. 5: 238. https://doi.org/10.3390/info13050238
APA StyleO’Rourke, J., & Vîlcu, C. (2022). Simple Closed Quasigeodesics on Tetrahedra. Information, 13(5), 238. https://doi.org/10.3390/info13050238