
Particle-Swarm-Optimization-Enhanced Radial-Basis-Function-Kernel-Based Adaptive Filtering Applied to Maritime Data




Abstract
1. Introduction
2. Materials and Methods
2.1. The RBF-Kernel-Based Adaptive Filtering
2.2. The Evolutionary Metaheuristic Optimization Algorithms
2.2.1. Traditional PSO Algorithm
2.2.2. Enhanced Partial Search Particle Swarm Optimization (EPS-PSO) Algorithm
2.2.3. Multiswarm Particle Swarm Optimization (MSPSO)
2.2.4. Genetic Algorithm (GA)
3. Results and Discussion
3.1. Simulation Results
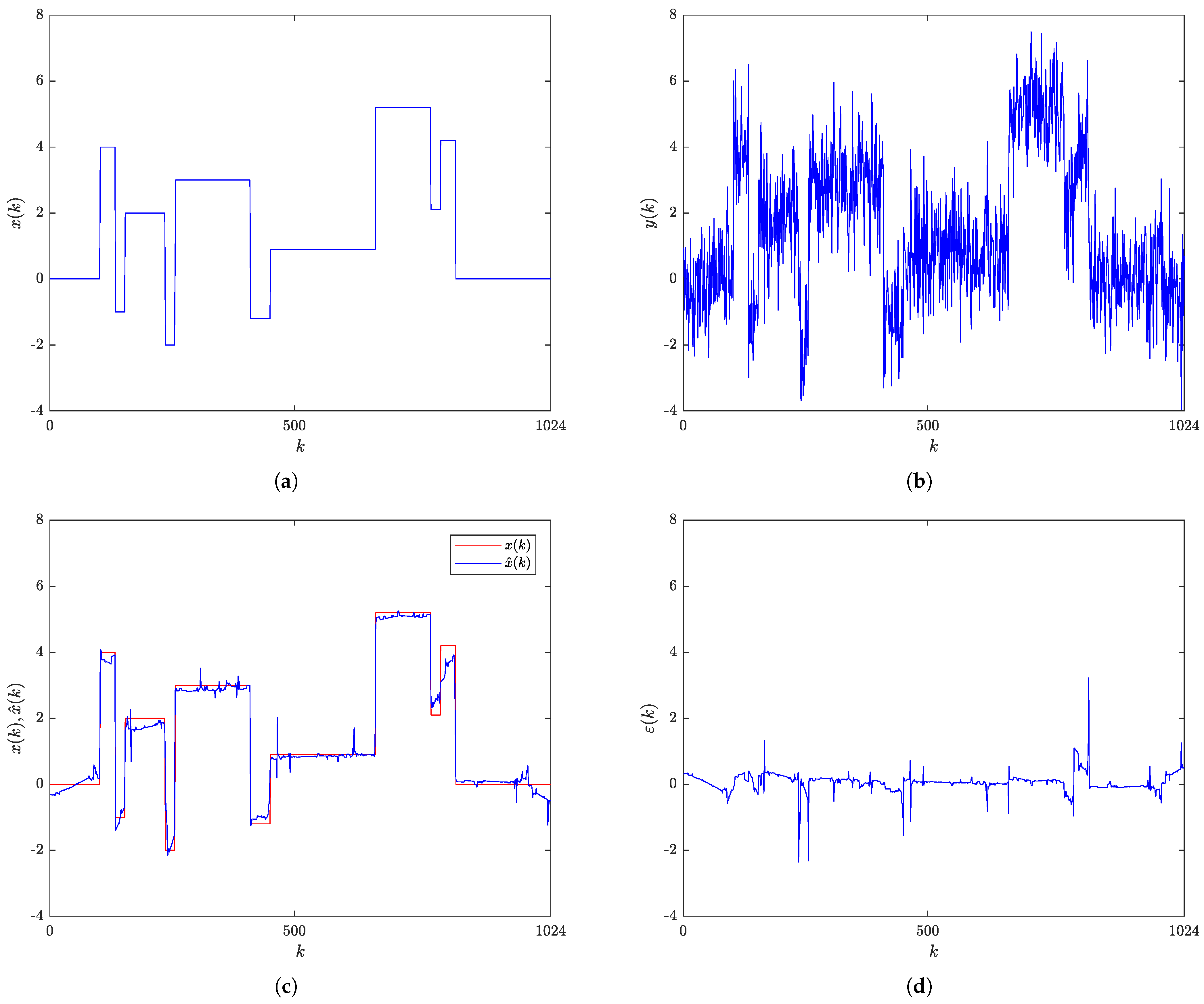
3.1.1. Blocks Signal
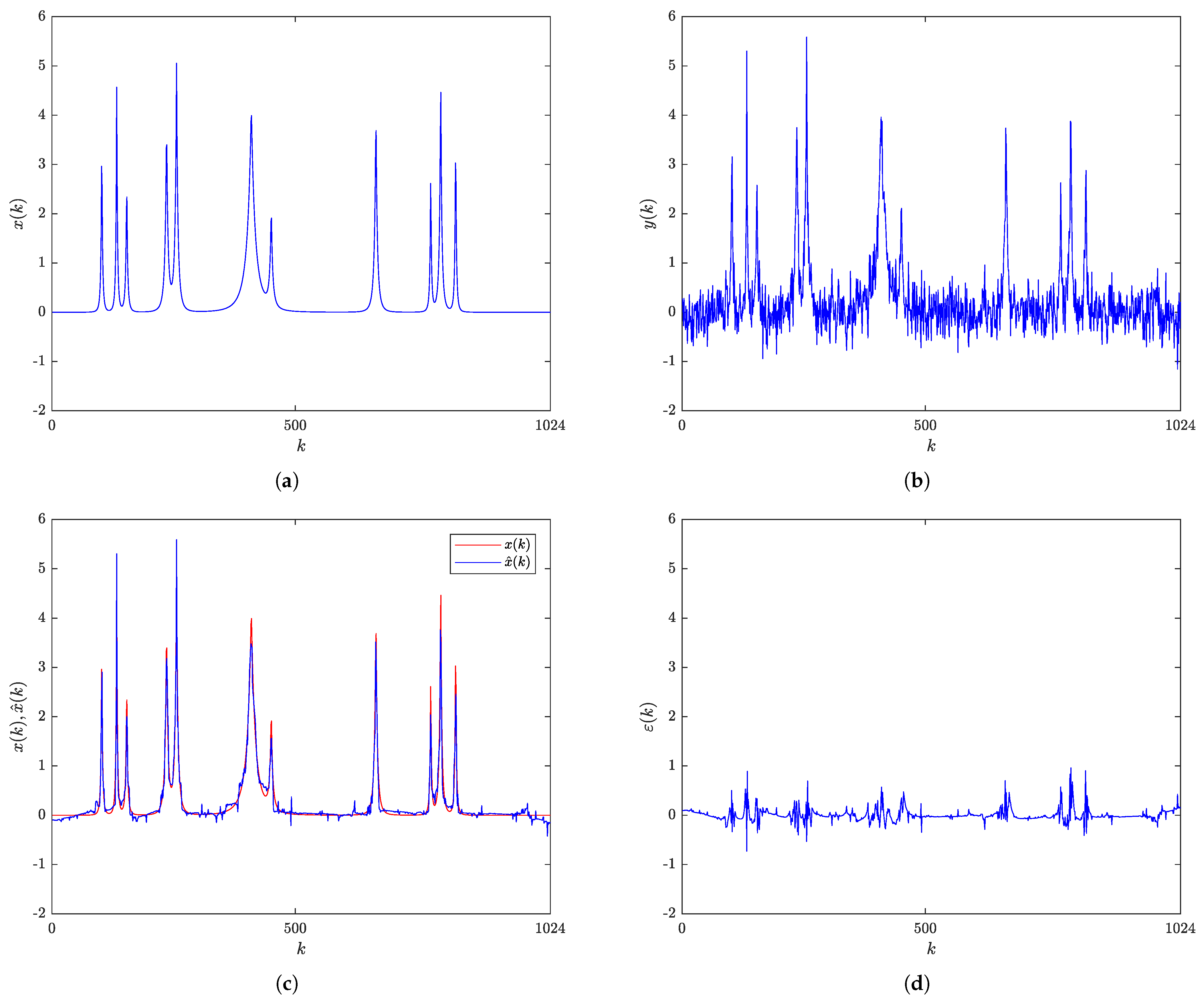
3.1.2. Bumps Signal
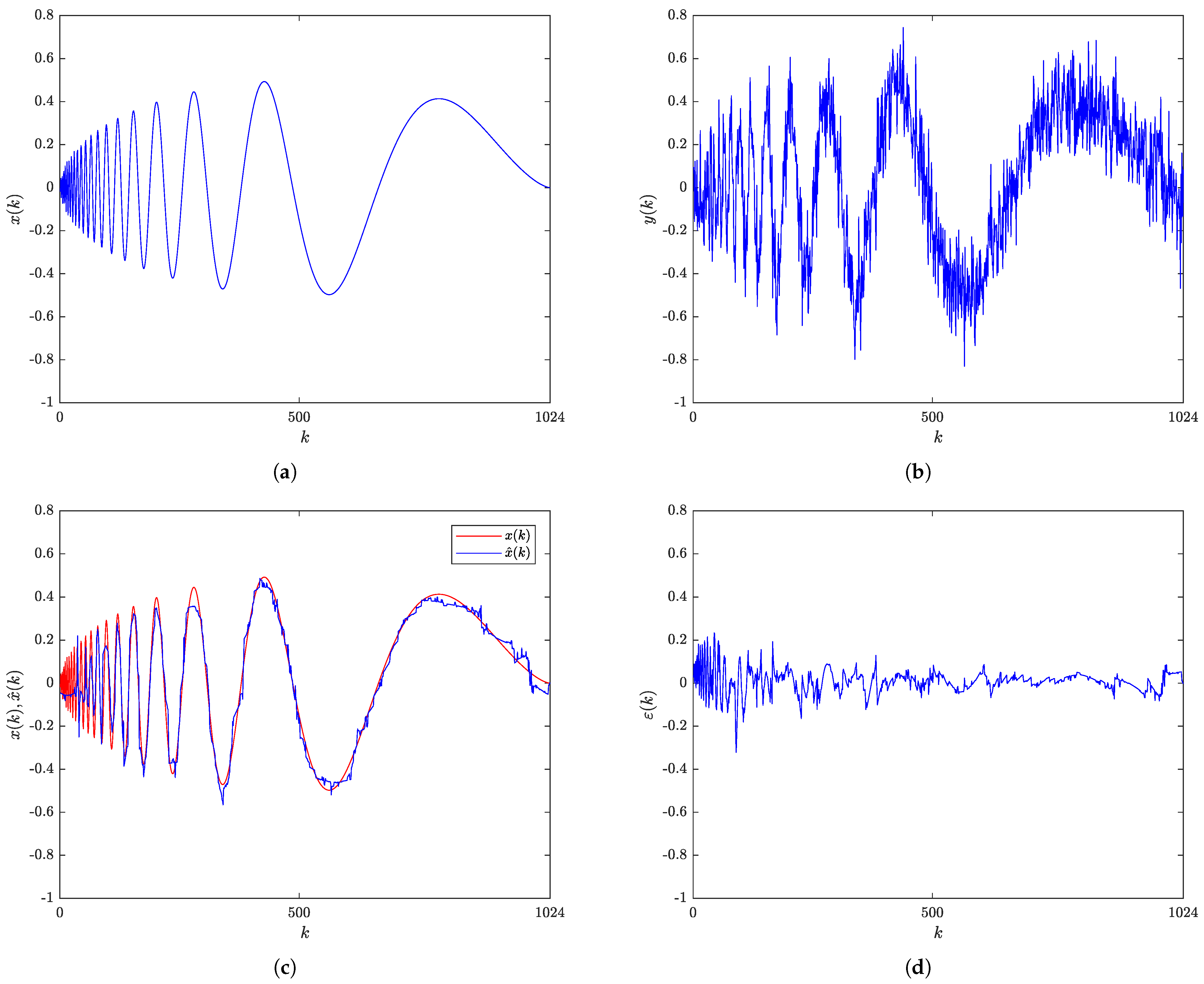
3.1.3. Doppler Signal
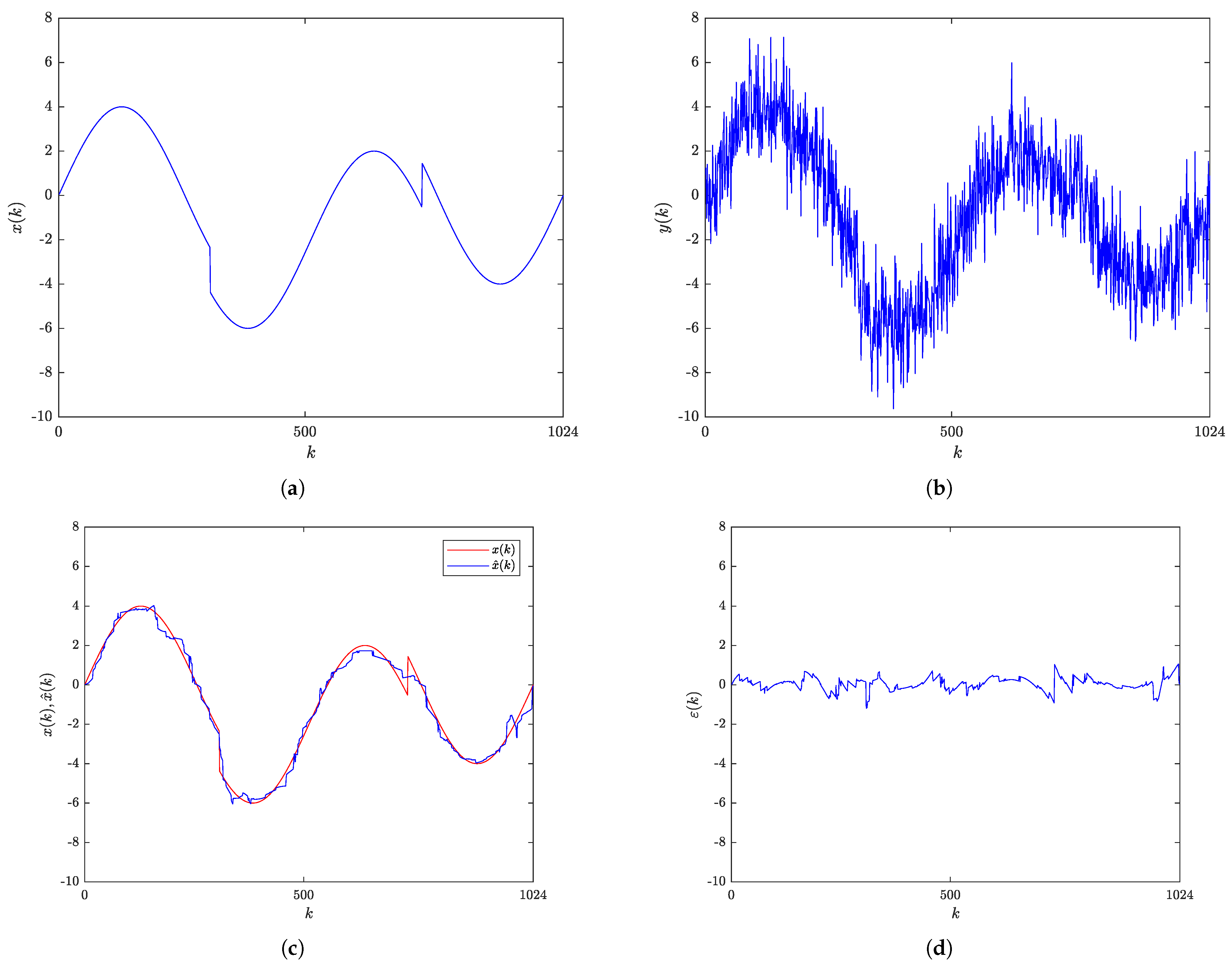
3.1.4. HeaviSine Signal
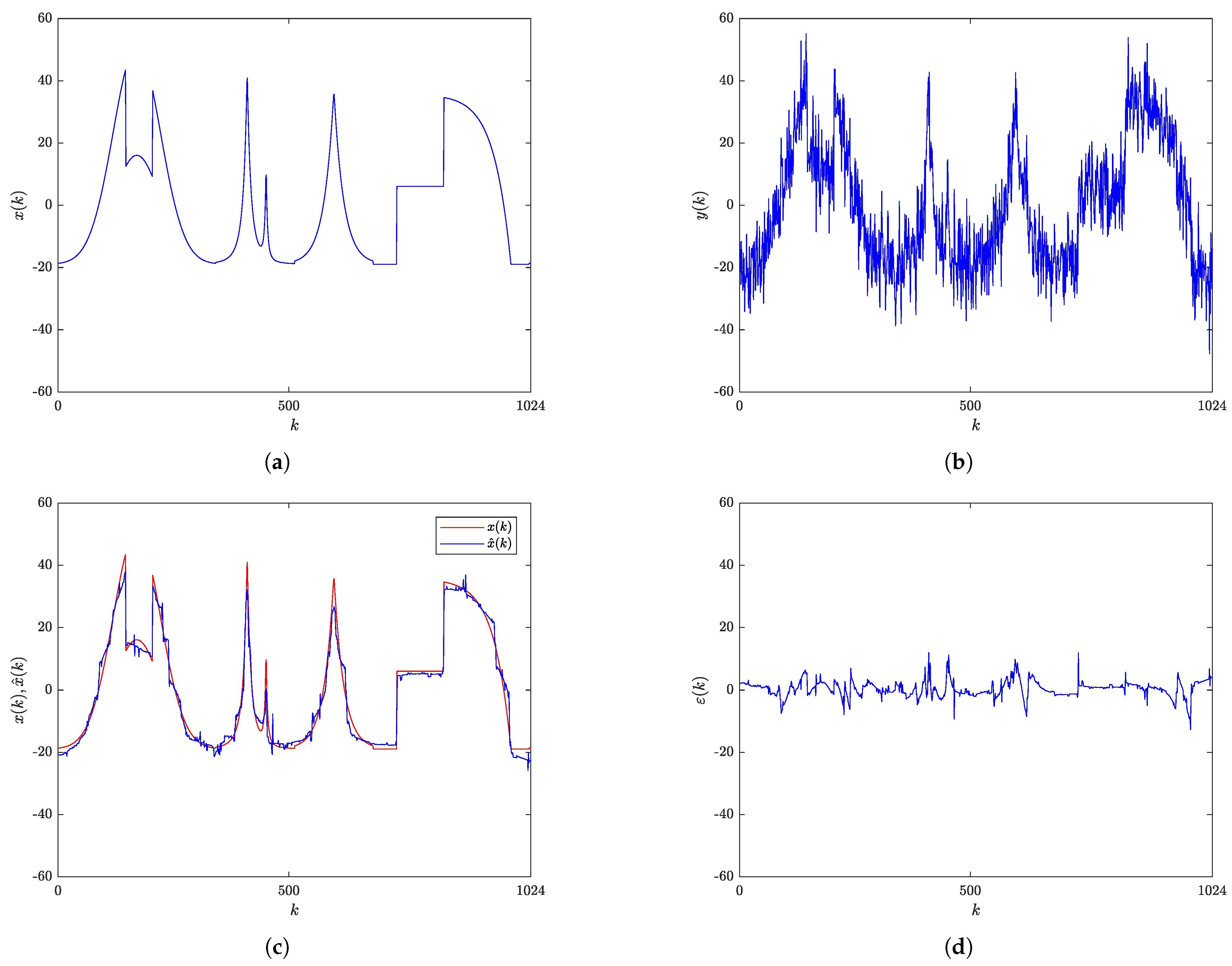
3.1.5. Piece-Regular Signal
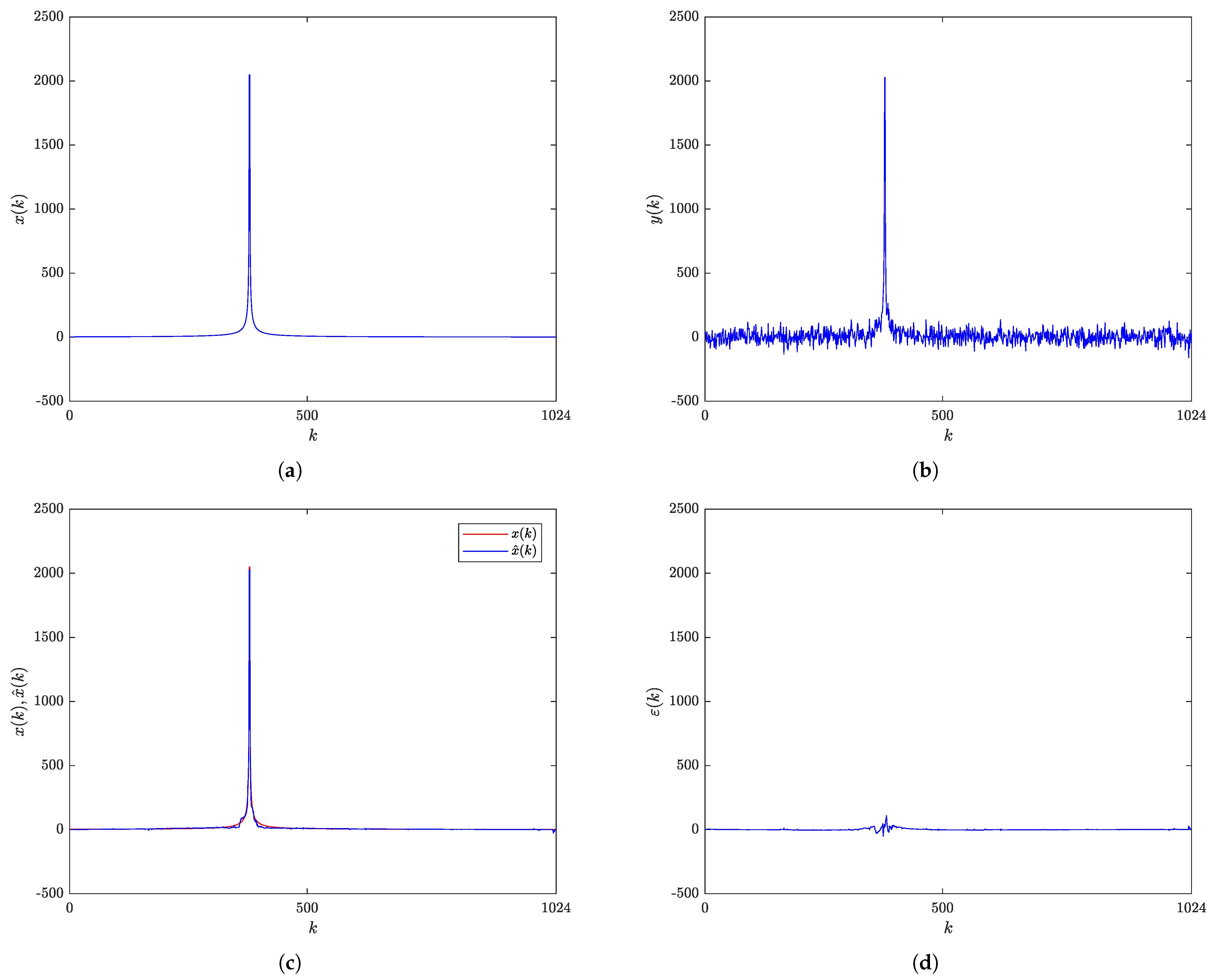
3.1.6. Sing Signal
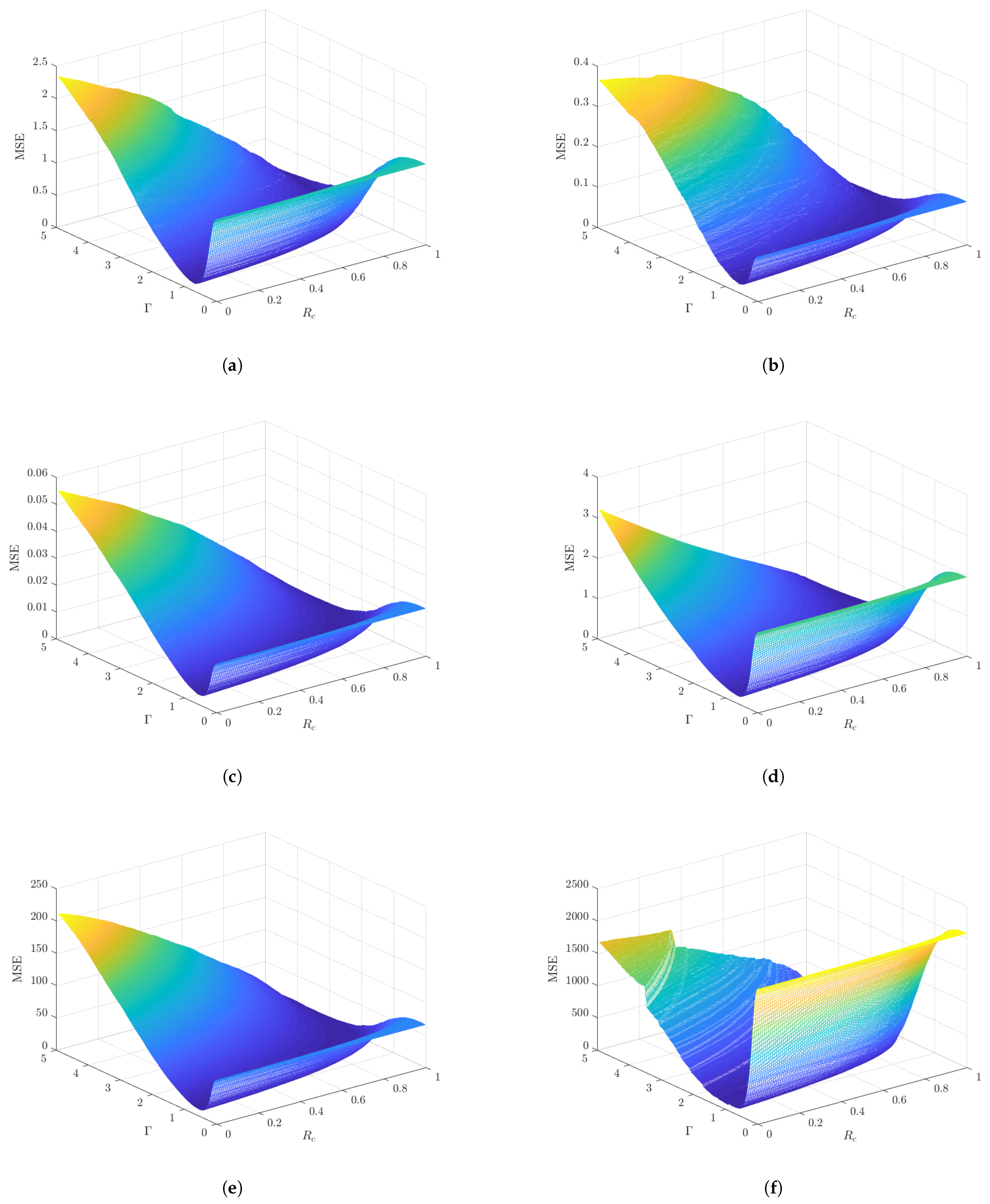
3.1.7. Parameters Sensitivity
3.1.8. Effects of the Signal Length
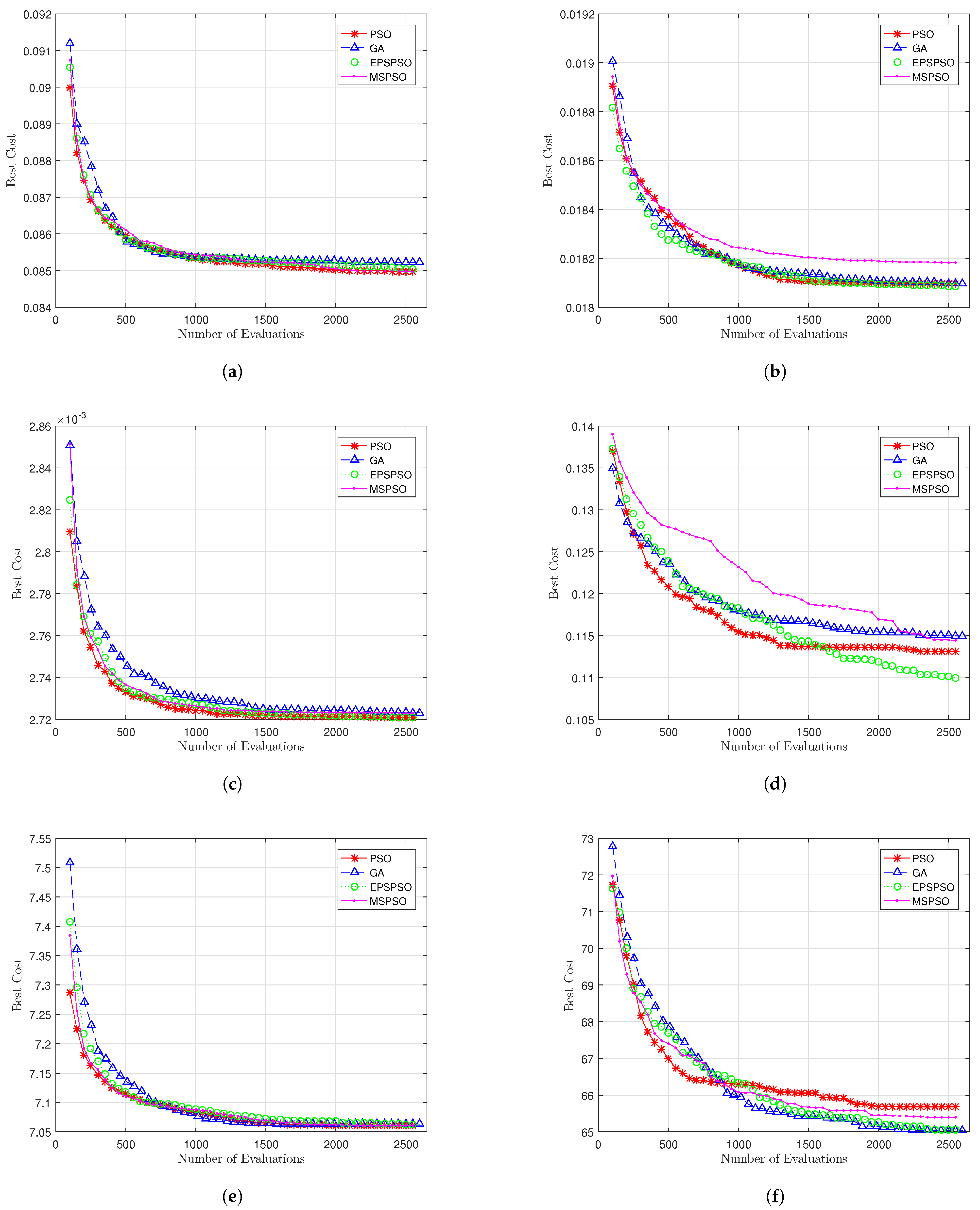
3.2. Parameters Optimization
3.3. Experimental Results for Real-Life Signals
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Appendix A
| Algorithm A1 PSO algorithm-general |
| Require: Ensure: 1: Initialization: 2: fortosdo 3: Initialize position , velocity and particle’s personal best ; 4: Perform the function evaluation ; 5: 6: if then 7: ; 8: end if 9: end for 10: Main loop: 11: for to do 12: (17); 13: for to s do 14: (15), (16); 15: Perform the function evaluation ; 16: if then 17: ; 18: end if 19: if then 20: ; 21: end if 22: end for 23: end for |
| Algorithm A2 EPS-PSO algorithm-general |
| Require: Ensure: 1: Initialization: 2: for each particle in both swarms do 3: Initialize position , velocity and particle’s personal best ; 4: Perform the function evaluation ; 5: 6: if then 7: ; 8: end if 9: end for 10: Main loop: 11: for to do 12: (17); 13: for each particle in both swarms do 14: (15), (16); 15: Perform the function evaluation ; 16: if the criterion of the reinitialization period for the cosearch swarm is met then 17: for each particle in the cosearch swarm do 18: Reinitialize position , velocity and particle’s personal best ; 19: Perform the evaluation ; 20: if then 21: ; 22: end if 23: end for 24: end if 25: end for 26: end for |
| Algorithm A3 MSPSO algorithm-general |
| Require: Ensure: 1:Initialization: 2:for to do 3: for to s do 4: Initialize position , velocity and particle’s personal best 5: Perform the function evaluation 6: ; 7: if then 8: ; 9: end if 10: end for 11:end for 12:Main loop: 13:for to do 14: (17); 15: for to do 16: for to s do 17: (15), (16); 18: Perform the function evaluation 19: if then 20: ; 21: end if 22: if then 23: ; 24: end if 25: end for 26: end for 27: 28:end for |
| Algorithm A4 GA algorithm-general |
| Require: Ensure: 1:Initialization: 2:fortosdo 3: Initialize position , velocity and particle’s personal best 4: Perform the function evaluation 5:end for 6:Sort population in descending order; 7:; 8:Main loop: 9:for to do 10: for to do 11: Compute crossovers and form new subpopulation; 12: end for 13: for to do 14: Compute mutation and form new subpopulation; 15: end for 16: Create merged population; 17: Sort population in descending order; 18: Truncate population to s best performing particles; 19: ; 20:end for |
References
- Broomhead, D.; King, G.P. Extracting qualitative dynamics from experimental data. Phys. D Nonlinear Phenom. 1986, 20, 217–236. [Google Scholar] [CrossRef]
- Smyth, A.; Wu, M. Multi-rate Kalman filtering for the data fusion of displacement and acceleration response measurements in dynamic system monitoring. Mech. Syst. Signal Process. 2007, 21, 706–723. [Google Scholar] [CrossRef]
- Knowles, I.; Renka, R.J. Methods for numerical differentiation of noisy data. Electron. J. Diff. Eqns. 2014, 21, 235–246. [Google Scholar]
- Layden, D.; Cappellaro, P. Spatial noise filtering through error correction for quantum sensing. Npj Quantum Inf. 2018, 4, 1–6. [Google Scholar] [CrossRef]
- García-Gil, D.; Luengo, J.; García, S.; Herrera, F. Enabling Smart Data: Noise filtering in Big Data classification. Inf. Sci. 2019, 479, 135–152. [Google Scholar] [CrossRef]
- Li, H.; Gedikli, E.D.; Lubbad, R. Exploring time-delay-based numerical differentiation using principal component analysis. Phys. A Stat. Mech. Its Appl. 2020, 556, 124839. [Google Scholar] [CrossRef]
- Zhao, Z.; Wang, S.; Wong, D.; Sun, C.; Yan, R.; Chen, X. Robust enhanced trend filtering with unknown noise. Signal Process. 2021, 180, 107889. [Google Scholar] [CrossRef]
- Ehlers, F.; Fox, W.; Maiwald, D.; Ulmke, M.; Wood, G. Advances in Signal Processing for Maritime Applications. EURASIP J. Adv. Signal Process. 2010. [Google Scholar] [CrossRef]
- Singer, A.C.; Nelson, J.K.; Kozat, S.S. Signal processing for underwater acoustic communications. IEEE Commun. Mag. 2009, 47, 90–96. [Google Scholar] [CrossRef]
- Sazontov, A.; Malekhanov, A. Matched field signal processing in underwater sound channels. Acoust. Phys. 2015, 61, 213–230. [Google Scholar] [CrossRef]
- Yuan, F.; Ke, X.; Cheng, E. Joint Representation and Recognition for Ship-Radiated Noise Based on Multimodal Deep Learning. J. Mar. Sci. Eng. 2019, 7, 380. [Google Scholar] [CrossRef]
- Tu, Q.; Yuan, F.; Yang, W.; Cheng, E. An Approach for Diver Passive Detection Based on the Established Model of Breathing Sound Emission. J. Mar. Sci. Eng. 2020, 8, 44. [Google Scholar] [CrossRef]
- Vicen-Bueno, R.; Carrasco-Álvarez, R.; Rosa-Zurera, M.; Nieto-Borge, J.C.; Jarabo-Amores, M.P. Artificial Neural Network-Based Clutter Reduction Systems for Ship Size Estimation in Maritime Radars. EURASIP J. Adv. Signal Process. 2010, 2010, 380473. [Google Scholar] [CrossRef]
- Ristic, B.; Rosenberg, L.; Kim, D.Y.; Guan, R. Bernoulli filter for tracking maritime targets using point measurements with amplitude. Signal Process. 2021, 181, 107919. [Google Scholar] [CrossRef]
- Schettini, R.; Corchs, S. Underwater Image Processing: State of the Art of Restoration and Image Enhancement Methods. EURASIP J. Adv. Signal Process. 2010, 2010, 746052. [Google Scholar] [CrossRef]
- Lu, H.; Li, Y.; Zhang, Y.; Chen, M.; Serikawa, S.; Kim, H. Underwater Optical Image Processing: A Comprehensive Review. Mob. Netw. Appl. 2017, 22, 1204–1211. [Google Scholar] [CrossRef]
- Huang, Y.; Li, W.; Yuan, F. Speckle Noise Reduction in Sonar Image Based on Adaptive Redundant Dictionary. J. Mar. Sci. Eng. 2020, 8, 761. [Google Scholar] [CrossRef]
- Ricci, R.; Francucci, M.; De Dominicis, L.; Ferri de Collibus, M.; Fornetti, G.; Guarneri, M.; Nuvoli, M.; Paglia, E.; Bartolini, L. Techniques for Effective Optical Noise Rejection in Amplitude-Modulated Laser Optical Radars for Underwater Three-Dimensional Imaging. EURASIP J. Adv. Signal Process. 2010, 2010, 958360. [Google Scholar] [CrossRef]
- Kim, K.S.; Lee, J.B.; Roh, M.I.; Han, K.M.; Lee, G.H. Prediction of Ocean Weather Based on Denoising AutoEncoder and Convolutional LSTM. J. Mar. Sci. Eng. 2020, 8, 805. [Google Scholar] [CrossRef]
- Yuan, J.; Guo, J.; Niu, Y.; Zhu, C.; Li, Z.; Liu, X. Denoising Effect of Jason-1 Altimeter Waveforms with Singular Spectrum Analysis: A Case Study of Modelling Mean Sea Surface Height over South China Sea. J. Mar. Sci. Eng. 2020, 8, 426. [Google Scholar] [CrossRef]
- Wei, J.; Xie, T.; Shi, M.; He, Q.; Wang, T.; Amirat, Y. Imbalance Fault Classification Based on VMD Denoising and S-LDA for Variable-Speed Marine Current Turbine. J. Mar. Sci. Eng. 2021, 9, 248. [Google Scholar] [CrossRef]
- Katkovnik, V.; Egiazarian, K.; Astola, J. Local Approximation Techniques in Signal and Image Processing; SPIE—The International Society for Optical Engineering: Bellingham, WA, USA, 2006. [Google Scholar] [CrossRef]
- Goldenshluger, A.; Nemirovski, A. On spatially adaptive estimation of nonparametric regression. Math. Methods Stat. 1997, 6, 135–170. [Google Scholar]
- Katkovnik, V. A new method for varying adaptive bandwidth selection. IEEE Trans. Signal Process. 1999, 47, 2567–2571. [Google Scholar] [CrossRef]
- Katkovnik, V.; Shmulevich, I. Kernel density estimation with adaptive varying window size. Pattern Recognit. Lett. 2002, 23, 1641–1648. [Google Scholar] [CrossRef]
- Lerga, J.; Vrankic, M.; Sucic, V. A Signal Denoising Method Based on the Improved ICI Rule. IEEE Signal Process. Lett. 2008, 15, 601–604. [Google Scholar] [CrossRef]
- Sucic, V.; Lerga, J.; Vrankic, M. Adaptive filter support selection for signal denoising based on the improved ICI rule. Digit. Signal Process. 2013, 23, 65–74. [Google Scholar] [CrossRef]
- Katkovnik, V. Multiresolution local polynomial regression: A new approach to pointwise spatial adaptation. Digit. Signal Process. 2005, 15, 73–116. [Google Scholar] [CrossRef][Green Version]
- Cai, Z. Weighted Nadaraya–Watson Regression Estimation. Stat. Probab. Lett. 2001, 51, 307–318. [Google Scholar] [CrossRef]
- Katkovnik, V.; Egiazarian, K.; Astola, J. Adaptive window size image de-noising based on intersection of confidence intervals (ICI) rule. J. Math. Imaging Vis. 2002, 16, 223–235. [Google Scholar] [CrossRef]
- Katkovnik, V.; Egiazarian, K.; Astola, J. Adaptive Varying Scale Methods in Image Processing; TTY Monistamo: Tampere, Finland, 2003; Volume 19. [Google Scholar]
- Lerga, J.; Sucic, V.; Sersic, D. Performance analysis of the LPA-RICI denoising method. In Proceedings of the 2009 6th International Symposium on Image and Signal Processing and Analysis, Salzburg, Austria, 16–18 September 2009; pp. 28–33. [Google Scholar] [CrossRef]
- Lopac, N.; Lerga, J.; Cuoco, E. Gravitational-Wave Burst Signals Denoising Based on the Adaptive Modification of the Intersection of Confidence Intervals Rule. Sensors 2020, 20, 6920. [Google Scholar] [CrossRef]
- Evangeline, S.I.; Rathika, P. Particle Swarm optimization Algorithm for Optimal Power Flow Incorporating Wind Farms. In Proceedings of the 2019 IEEE International Conference on Intelligent Techniques in Control, Optimization and Signal Processing (INCOS), Tamilnadu, India, 11–13 April 2019; pp. 1–4. [Google Scholar] [CrossRef]
- Fan, S.K.S.; Jen, C.H. An Enhanced Partial Search to Particle Swarm Optimization for Unconstrained Optimization. Mathematics 2019, 7, 357. [Google Scholar] [CrossRef]
- Garg, H. A hybrid PSO-GA algorithm for constrained optimization problems. Appl. Math. Comput. 2016, 274, 292–305. [Google Scholar] [CrossRef]
- Shen, Y.; Li, Y.; Kang, H.; Zhang, Y.; Sun, X.; Chen, Q.; Peng, J.; Wang, H. Research on Swarm Size of Multi-swarm Particle Swarm Optimization Algorithm. In Proceedings of the 2018 IEEE 4th International Conference on Computer and Communications (ICCC), Chengdu, China, 7–10 December 2018; pp. 2243–2247. [Google Scholar] [CrossRef]
- Donoho, D.L.; Johnstone, I.M. Adapting to Unknown Smoothness via Wavelet Shrinkage. J. Am. Stat. Assoc. 1995, 90, 1200–1224. [Google Scholar] [CrossRef]
- Schafer, R.W. What Is a Savitzky-Golay Filter? [Lecture Notes]. IEEE Signal Process. Mag. 2011, 28, 111–117. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Filtering Quality Indicator | RBF-RICI , | LPA-RICI , | LPA-ICI | Savitzky- Golay |
|---|---|---|---|---|
| MSE | 0.1409 | 0.1459 | 0.2114 | 0.3276 |
| MAE | 0.2132 | 0.2100 | 0.3264 | 0.4219 |
| MAXE | 3.6682 | 3.6471 | 4.0740 | 2.5848 |
| PSNR (dB) | 22.8307 | 22.6801 | 21.0700 | 19.1668 |
| ISNR (dB) | 11.4673 | 11.3166 | 9.7065 | 7.8033 |
| Filtering Quality Indicator | RBF-RICI , | LPA-RICI , | LPA-ICI | Savitzky- Golay |
|---|---|---|---|---|
| MSE | 0.0849 | 0.0973 | 0.1305 | 0.2599 |
| MAE | 0.1797 | 0.1864 | 0.2550 | 0.3684 |
| MAXE | 3.2267 | 2.8130 | 2.9652 | 2.3588 |
| PSNR (dB) | 25.0323 | 24.4376 | 23.1630 | 20.1717 |
| ISNR (dB) | 11.6688 | 11.0741 | 9.7996 | 6.8082 |
| Filtering Quality Indicator | RBF-RICI , | LPA-RICI , | LPA-ICI | Savitzky- Golay |
|---|---|---|---|---|
| MSE | 0.0311 | 0.0298 | 0.0595 | 0.1889 |
| MAE | 0.1000 | 0.1059 | 0.1703 | 0.2939 |
| MAXE | 2.4207 | 2.4023 | 2.4001 | 2.3602 |
| PSNR (dB) | 29.3877 | 29.5756 | 26.5776 | 21.5585 |
| ISNR (dB) | 13.0243 | 13.2121 | 10.2142 | 5.1951 |
| Filtering Quality Indicator | LPA-RICI , | LPA-ICI | Savitzky- Golay |
|---|---|---|---|
| MSE | 3.43% | 33.35% | 56.99% |
| MAE | −1.52% | 34.68% | 49.47% |
| MAXE | −0.58% | 9.96% | −41.91% |
| PSNR (dB) | 0.66% | 8.36% | 19.12% |
| ISNR (dB) | 1.33% | 18.14% | 46.95% |
| Filtering Quality Indicator | LPA-RICI , | LPA-ICI | Savitzky- Golay |
|---|---|---|---|
| MSE | 12.74% | 34.94% | 67.33% |
| MAE | 3.59% | 29.53% | 51.22% |
| MAXE | −14.71% | −8.82% | −36.79% |
| PSNR (dB) | 2.43% | 8.07% | 24.10% |
| ISNR (dB) | 5.37% | 19.07% | 71.39% |
| Filtering Quality Indicator | LPA-RICI , | LPA-ICI | Savitzky- Golay |
|---|---|---|---|
| MSE | −4.36% | 47.73% | 83.54% |
| MAE | 5.57% | 41.28% | 65.97% |
| MAXE | −0.77% | −0.86% | −2.56% |
| PSNR (dB) | −0.64% | 10.57% | 36.32% |
| ISNR (dB) | −1.42% | 27.51% | 150.70% |
| Runtime (s) | ||||
|---|---|---|---|---|
| SNR (dB) | RBF-RICI | LPA-RICI | LPA-ICI | Savitzky–Golay |
| 5 | 0.1439 | 0.2301 | 0.1482 | 0.0006 |
| 7 | 0.2655 | 0.0839 | 0.1351 | 0.0004 |
| 10 | 0.2136 | 0.2353 | 0.1413 | 0.0010 |
| Filtering Quality Indicator | RBF-RICI , | LPA-RICI , | LPA-ICI | Savitzky- Golay |
|---|---|---|---|---|
| MSE | 0.0277 | 0.0356 | 0.0382 | 0.0626 |
| MAE | 0.0966 | 0.1093 | 0.1215 | 0.1880 |
| MAXE | 1.1582 | 1.2638 | 1.2638 | 1.7304 |
| PSNR (dB) | 29.6493 | 28.5563 | 28.2463 | 26.1023 |
| ISNR (dB) | 7.8378 | 6.7449 | 6.4348 | 4.2909 |
| Filtering Quality Indicator | RBF-RICI , | LPA-RICI , | LPA-ICI | Savitzky- Golay |
|---|---|---|---|---|
| MSE | 0.0181 | 0.0251 | 0.0279 | 0.0454 |
| MAE | 0.0806 | 0.0944 | 0.1028 | 0.1546 |
| MAXE | 0.9612 | 1.0178 | 1.0178 | 1.7418 |
| PSNR (dB) | 31.4981 | 30.0755 | 29.6152 | 27.4996 |
| ISNR (dB) | 7.6866 | 6.2640 | 5.8038 | 3.6881 |
| Filtering Quality Indicator | RBF-RICI , | LPA-RICI , | LPA-ICI | Savitzky- Golay |
|---|---|---|---|---|
| MSE | 0.0101 | 0.0148 | 0.0166 | 0.0276 |
| MAE | 0.0599 | 0.0777 | 0.0790 | 0.1228 |
| MAXE | 0.7072 | 0.7327 | 0.8098 | 1.3599 |
| PSNR (dB) | 34.0275 | 32.3577 | 31.8621 | 29.6602 |
| ISNR (dB) | 7.2161 | 5.5462 | 5.0506 | 2.8487 |
| Filtering Quality Indicator | LPA-RICI , | LPA-ICI | Savitzky- Golay |
|---|---|---|---|
| MSE | 22.19% | 27.49% | 55.75% |
| MAE | 11.62% | 20.49% | 48.62% |
| MAXE | 8.36% | 8.36% | 33.07% |
| PSNR (dB) | 3.83% | 4.97% | 13.59% |
| ISNR (dB) | 16.20% | 21.80% | 82.66% |
| Filtering Quality Indicator | LPA-RICI , | LPA-ICI | Savitzky- Golay |
|---|---|---|---|
| MSE | 27.89% | 35.13% | 60.13% |
| MAE | 14.62% | 21.60% | 47.87% |
| MAXE | 5.56% | 5.56% | 44.82% |
| PSNR (dB) | 4.73% | 6.36% | 14.54% |
| ISNR (dB) | 22.71% | 32.44% | 108.42% |
| Filtering Quality Indicator | LPA-RICI , | LPA-ICI | Savitzky- Golay |
|---|---|---|---|
| MSE | 31.76% | 39.16% | 63.41% |
| MAE | 22.91% | 24.18% | 51.22% |
| MAXE | 3.48% | 12.67% | 48.00% |
| PSNR (dB) | 5.16% | 6.80% | 14.72% |
| ISNR (dB) | 30.11% | 42.88% | 153.31% |
| Runtime (s) | ||||
|---|---|---|---|---|
| SNR (dB) | RBF-RICI | LPA-RICI | LPA-ICI | Savitzky-Golay |
| 5 | 0.1740 | 0.1614 | 0.1117 | 0.0002 |
| 7 | 0.1974 | 0.1206 | 0.0937 | 0.0001 |
| 10 | 0.1812 | 0.0742 | 0.0845 | 0.0001 |
| Filtering Quality Indicator | RBF-RICI , | LPA-RICI , | LPA-ICI | Savitzky- Golay |
|---|---|---|---|---|
| MSE | 0.0037 | 0.0046 | 0.0059 | 0.0044 |
| MAE | 0.0452 | 0.0496 | 0.0590 | 0.0481 |
| MAXE | 0.2647 | 0.3061 | 0.3028 | 0.2949 |
| PSNR (dB) | 18.2042 | 17.1874 | 16.1235 | 17.4454 |
| ISNR (dB) | 8.8026 | 7.7858 | 6.7220 | 8.0439 |
| Filtering Quality Indicator | RBF-RICI , | LPA-RICI , | LPA-ICI | Savitzky- Golay |
|---|---|---|---|---|
| MSE | 0.0027 | 0.0033 | 0.0045 | 0.0034 |
| MAE | 0.0373 | 0.0417 | 0.0512 | 0.0412 |
| MAXE | 0.3212 | 0.2803 | 0.3177 | 0.2776 |
| PSNR (dB) | 19.5106 | 18.6596 | 17.3110 | 18.5490 |
| ISNR (dB) | 8.1091 | 7.2581 | 5.9094 | 7.1475 |
| Filtering Quality Indicator | RBF-RICI , | LPA-RICI , | LPA-ICI | Savitzky- Golay |
|---|---|---|---|---|
| MSE | 0.0017 | 0.0021 | 0.0030 | 0.0023 |
| MAE | 0.0293 | 0.0319 | 0.0411 | 0.0332 |
| MAXE | 0.2097 | 0.2553 | 0.2809 | 0.2643 |
| PSNR (dB) | 21.5377 | 20.6978 | 19.1250 | 20.2577 |
| ISNR (dB) | 7.1362 | 6.2962 | 4.7235 | 5.8561 |
| Filtering Quality Indicator | LPA-RICI , | LPA-ICI | Savitzky- Golay |
|---|---|---|---|
| MSE | 19.57% | 37.29% | 15.91% |
| MAE | 8.87% | 23.39% | 6.03% |
| MAXE | 13.52% | 12.58% | 10.24% |
| PSNR (dB) | 5.92% | 12.90% | 4.35% |
| ISNR (dB) | 13.06% | 30.95% | 9.43% |
| Filtering Quality Indicator | LPA-RICI , | LPA-ICI | Savitzky- Golay |
|---|---|---|---|
| MSE | 18.18% | 40.00% | 20.59% |
| MAE | 10.55% | 27.15% | 9.47% |
| MAXE | −14.59% | −1.10% | −15.71% |
| PSNR (dB) | 4.56% | 12.71% | 5.18% |
| ISNR (dB) | 11.72% | 37.22% | 13.45% |
| Filtering Quality Indicator | LPA-RICI , | LPA-ICI | Savitzky- Golay |
|---|---|---|---|
| MSE | 19.05% | 43.33% | 26.09% |
| MAE | 8.15% | 28.71% | 11.75% |
| MAXE | 17.86% | 25.35% | 20.66% |
| PSNR (dB) | 4.06% | 12.62% | 6.32% |
| ISNR (dB) | 13.34% | 51.08% | 21.86% |
| Runtime (s) | ||||
|---|---|---|---|---|
| SNR (dB) | RBF-RICI | LPA-RICI | LPA-ICI | Savitzky–Golay |
| 5 | 0.1600 | 0.0658 | 0.0947 | 0.0010 |
| 7 | 0.1177 | 0.0464 | 0.0836 | 0.0004 |
| 10 | 0.0512 | 0.0555 | 0.0702 | 0.0007 |
| Filtering Quality Indicator | RBF-RICI , | LPA-RICI , | LPA-ICI | Savitzky- Golay |
|---|---|---|---|---|
| MSE | 0.1683 | 0.2022 | 0.3517 | 0.0995 |
| MAE | 0.3264 | 0.3432 | 0.4737 | 0.2217 |
| MAXE | 1.2817 | 1.8795 | 2.7010 | 1.0594 |
| PSNR (dB) | 19.7793 | 18.9828 | 16.5791 | 22.0611 |
| ISNR (dB) | 12.6436 | 11.8471 | 9.4434 | 14.9254 |
| Filtering Quality Indicator | RBF-RICI , | LPA-RICI , | LPA-ICI | Savitzky- Golay |
|---|---|---|---|---|
| MSE | 0.1070 | 0.1280 | 0.2540 | 0.0763 |
| MAE | 0.2526 | 0.2763 | 0.3987 | 0.2001 |
| MAXE | 1.1832 | 1.8756 | 2.6166 | 1.0451 |
| PSNR (dB) | 21.7477 | 20.9676 | 17.9928 | 23.2185 |
| ISNR (dB) | 12.6119 | 11.8319 | 8.8571 | 14.0828 |
| Filtering Quality Indicator | RBF-RICI , | LPA-RICI , | LPA-ICI | Savitzky- Golay |
|---|---|---|---|---|
| MSE | 0.0594 | 0.0668 | 0.1549 | 0.0536 |
| MAE | 0.1782 | 0.1924 | 0.3101 | 0.1578 |
| MAXE | 1.0415 | 0.9900 | 2.4188 | 1.0251 |
| PSNR (dB) | 24.3045 | 23.7948 | 20.1394 | 24.7476 |
| ISNR (dB) | 12.1688 | 11.6591 | 8.0037 | 12.6118 |
| Filtering Quality Indicator | LPA-RICI , | LPA-ICI | Savitzky- Golay |
|---|---|---|---|
| MSE | 16.77% | 52.15% | −69.15% |
| MAE | 4.90% | 31.10% | −47.23% |
| MAXE | 31.81% | 52.55% | −20.98% |
| PSNR (dB) | 4.20% | 19.30% | −10.34% |
| ISNR (dB) | 6.72% | 33.89% | −15.29% |
| Filtering Quality Indicator | LPA-RICI , | LPA-ICI | Savitzky- Golay |
|---|---|---|---|
| MSE | 16.41% | 57.87% | −40.24% |
| MAE | 8.58% | 36.64% | −26.24% |
| MAXE | 36.92% | 54.78% | −13.21% |
| PSNR (dB) | 3.72% | 20.87% | −6.33% |
| ISNR (dB) | 6.59% | 42.39% | −10.44% |
| Filtering Quality Indicator | LPA-RICI , | LPA-ICI | Savitzky- Golay |
|---|---|---|---|
| MSE | 11.08% | 61.65% | −10.82% |
| MAE | 7.38% | 42.53% | −12.93% |
| MAXE | −5.20% | 56.94% | −1.60% |
| PSNR (dB) | 2.14% | 20.68% | −1.79% |
| ISNR (dB) | 4.37% | 52.04% | −3.51% |
| Runtime (s) | ||||
|---|---|---|---|---|
| SNR (dB) | RBF-RICI | LPA-RICI | LPA-ICI | Savitzky–Golay |
| 5 | 0.2017 | 0.1275 | 0.1274 | 0.0010 |
| 7 | 0.1428 | 0.1061 | 0.1534 | 0.0009 |
| 10 | 0.0942 | 0.1177 | 0.1102 | 0.0015 |
| Filtering Quality Indicator | RBF-RICI , | LPA-RICI , | LPA-ICI | Savitzky- Golay |
|---|---|---|---|---|
| MSE | 10.6693 | 14.1213 | 18.3593 | 13.3110 |
| MAE | 2.3735 | 2.7457 | 3.1596 | 2.7866 |
| MAXE | 17.7053 | 19.0331 | 18.5048 | 15.9277 |
| PSNR (dB) | 22.4826 | 21.2653 | 20.1255 | 21.5219 |
| ISNR (dB) | 9.9092 | 8.6918 | 7.5520 | 8.9485 |
| Filtering Quality Indicator | RBF-RICI , | LPA-RICI , | LPA-ICI | Savitzky- Golay |
|---|---|---|---|---|
| MSE | 7.0609 | 9.5441 | 13.0202 | 9.9522 |
| MAE | 1.9533 | 2.2509 | 2.6585 | 2.3151 |
| MAXE | 12.7040 | 18.3339 | 15.7328 | 15.2692 |
| PSNR (dB) | 24.2754 | 22.9667 | 21.6178 | 22.7848 |
| ISNR (dB) | 9.7020 | 8.3932 | 7.0444 | 8.2114 |
| Filtering Quality Indicator | RBF-RICI , | LPA-RICI , | LPA-ICI | Savitzky- Golay |
|---|---|---|---|---|
| MSE | 3.7850 | 5.2971 | 7.6770 | 6.7829 |
| MAE | 1.4513 | 1.6479 | 2.0257 | 1.8895 |
| MAXE | 8.7759 | 16.1955 | 12.8774 | 14.5437 |
| PSNR (dB) | 26.9834 | 25.5236 | 23.9121 | 24.4498 |
| ISNR (dB) | 9.4099 | 7.9502 | 6.3386 | 6.8764 |
| Filtering Quality Indicator | LPA-RICI , | LPA-ICI | Savitzky- Golay |
|---|---|---|---|
| MSE | 24.45% | 41.89% | 19.85% |
| MAE | 13.56% | 24.88% | 14.82% |
| MAXE | 6.98% | 4.32% | −11.16% |
| PSNR (dB) | 5.72% | 11.71% | 4.46% |
| ISNR (dB) | 14.01% | 31.21% | 10.74% |
| Filtering Quality Indicator | LPA-RICI , | LPA-ICI | Savitzky- Golay |
|---|---|---|---|
| MSE | 26.02% | 45.77% | 29.05% |
| MAE | 13.22% | 26.53% | 15.63% |
| MAXE | 30.71% | 19.25% | 16.80% |
| PSNR (dB) | 5.70% | 12.29% | 6.54% |
| ISNR (dB) | 15.59% | 37.73% | 18.15% |
| Filtering Quality Indicator | LPA-RICI , | LPA-ICI | Savitzky- Golay |
|---|---|---|---|
| MSE | 28.55% | 50.70% | 44.20% |
| MAE | 11.93% | 28.36% | 23.19% |
| MAXE | 45.81% | 31.85% | 39.66% |
| PSNR (dB) | 5.72% | 12.84% | 10.36% |
| ISNR (dB) | 18.36% | 48.45% | 36.84% |
| Runtime (s) | ||||
|---|---|---|---|---|
| SNR (dB) | RBF-RICI | LPA-RICI | LPA-ICI | Savitzky–Golay |
| 5 | 0.1522 | 0.0670 | 0.0862 | 0.0003 |
| 7 | 0.1459 | 0.0532 | 0.0975 | 0.0007 |
| 10 | 0.1366 | 0.0674 | 0.0873 | 0.0005 |
| Filtering Quality Indicator | RBF-RICI , | LPA-RICI , | LPA-ICI | Savitzky- Golay |
|---|---|---|---|---|
| MSE | 83.8782 | 141.4546 | 177.6915 | 1962.6767 |
| MAE | 3.8877 | 6.4314 | 6.8539 | 33.8149 |
| MAXE | 111.5364 | 211.4573 | 193.0249 | 303.2041 |
| PSNR (dB) | 46.9901 | 44.7204 | 43.7299 | 33.2981 |
| ISNR (dB) | 15.9259 | 13.6562 | 12.6657 | 2.2339 |
| Filtering Quality Indicator | RBF-RICI , | LPA-RICI , | LPA-ICI | Savitzky- Golay |
|---|---|---|---|---|
| MSE | 64.1788 | 80.2616 | 132.0162 | 1338.2816 |
| MAE | 3.3283 | 5.4335 | 5.8075 | 27.0899 |
| MAXE | 108.9616 | 114.1618 | 171.9973 | 300.6734 |
| PSNR (dB) | 48.1527 | 47.1815 | 45.0203 | 34.9611 |
| ISNR (dB) | 15.0885 | 14.1173 | 11.9561 | 1.8969 |
| Filtering Quality Indicator | RBF-RICI , | LPA-RICI , | LPA-ICI | Savitzky- Golay |
|---|---|---|---|---|
| MSE | 35.3108 | 50.3365 | 73.5058 | 804.6591 |
| MAE | 2.4840 | 4.0478 | 4.7087 | 19.5046 |
| MAXE | 84.0245 | 99.7517 | 115.0057 | 297.8189 |
| PSNR (dB) | 50.7475 | 49.2078 | 47.5634 | 37.1705 |
| ISNR (dB) | 14.6833 | 13.1435 | 11.4992 | 1.1062 |
| Filtering Quality Indicator | LPA-RICI , | LPA-ICI | Savitzky- Golay |
|---|---|---|---|
| MSE | 40.70% | 52.80% | 95.73% |
| MAE | 39.55% | 43.28% | 88.50% |
| MAXE | 47.25% | 42.22% | 63.21% |
| PSNR (dB) | 5.08% | 7.46% | 41.12% |
| ISNR (dB) | 16.62% | 25.74% | 612.93% |
| Filtering Quality Indicator | LPA-RICI , | LPA-ICI | Savitzky- Golay |
|---|---|---|---|
| MSE | 20.04% | 51.39% | 95.20% |
| MAE | 38.74% | 42.69% | 87.71% |
| MAXE | 4.56% | 36.65% | 63.76% |
| PSNR (dB) | 2.06% | 6.96% | 37.73% |
| ISNR (dB) | 6.88% | 26.20% | 695.43% |
| Filtering Quality Indicator | LPA-RICI , | LPA-ICI | Savitzky- Golay |
|---|---|---|---|
| MSE | 29.85% | 51.96% | 95.61% |
| MAE | 38.63% | 47.25% | 87.26% |
| MAXE | 15.77% | 26.94% | 71.79% |
| PSNR (dB) | 3.13% | 6.69% | 36.53% |
| ISNR (dB) | 11.72% | 27.69% | 1227.30% |
| Runtime (s) | ||||
|---|---|---|---|---|
| SNR (dB) | RBF-RICI | LPA-RICI | LPA-ICI | Savitzky-Golay |
| 5 | 1.1708 | 0.9176 | 0.8507 | 0.0001 |
| 7 | 1.5391 | 0.4543 | 0.8060 | 0.0001 |
| 10 | 1.1189 | 0.7373 | 0.5872 | 0.0001 |
| Signal | Filtering Quality Indicator | Signal Length | ||||
|---|---|---|---|---|---|---|
| 256 | 512 | 1024 | 2048 | 4096 | ||
| Blocks | MSE | 0.3513 | 0.1749 | 0.0849 | 0.0366 | 0.0304 |
| MAE | 0.4153 | 0.2670 | 0.1797 | 0.1101 | 0.0879 | |
| MAXE | 3.3583 | 2.9265 | 3.2267 | 2.5318 | 2.9030 | |
| PSNR (dB) | 18.8633 | 21.8929 | 25.0323 | 28.6845 | 29.4858 | |
| ISNR (dB) | 5.3256 | 8.6348 | 11.6688 | 15.1945 | 15.9701 | |
| Runtime (s) | 0.0208 | 0.0889 | 0.2655 | 1.2338 | 4.1248 | |
| Bumps | MSE | 0.0404 | 0.0292 | 0.0181 | 0.0138 | 0.0094 |
| MAE | 0.1331 | 0.1045 | 0.0806 | 0.0675 | 0.0554 | |
| MAXE | 1.2079 | 1.0840 | 0.9612 | 0.9261 | 0.9646 | |
| PSNR (dB) | 28.0066 | 29.4147 | 31.4981 | 32.6580 | 34.3455 | |
| ISNR (dB) | 3.7458 | 5.7128 | 7.6866 | 8.7608 | 10.4151 | |
| Runtime (s) | 0.0195 | 0.0652 | 0.1974 | 0.9162 | 2.5284 | |
| Doppler | MSE | 0.0073 | 0.0041 | 0.0027 | 0.0018 | 0.0013 |
| MAE | 0.0632 | 0.0442 | 0.0373 | 0.0301 | 0.0248 | |
| MAXE | 0.3359 | 0.2657 | 0.3212 | 0.4062 | 0.4062 | |
| PSNR (dB) | 15.2227 | 17.7765 | 19.5106 | 21.3202 | 22.8532 | |
| ISNR (dB) | 3.6592 | 6.4918 | 8.1091 | 9.8028 | 11.3092 | |
| Runtime (s) | 0.0134 | 0.0465 | 0.1177 | 0.4334 | 1.0760 | |
| HeaviSine | MSE | 0.3413 | 0.1443 | 0.1070 | 0.0661 | 0.0593 |
| MAE | 0.5009 | 0.2944 | 0.2526 | 0.2006 | 0.1873 | |
| MAXE | 1.3481 | 1.4779 | 1.1832 | 1.0982 | 1.2504 | |
| PSNR (dB) | 16.7101 | 20.4488 | 21.7477 | 23.8411 | 24.3073 | |
| ISNR (dB) | 7.4158 | 11.4321 | 12.6119 | 14.5912 | 15.0314 | |
| Runtime (s) | 0.0182 | 0.0529 | 0.1428 | 0.3319 | 0.8183 | |
| Piece-Regular | MSE | 21.2851 | 8.1570 | 7.0609 | 4.2778 | 3.2621 |
| MAE | 3.3795 | 2.0880 | 1.9533 | 1.3535 | 1.1571 | |
| MAXE | 18.4508 | 15.2367 | 12.7040 | 24.8208 | 24.8185 | |
| PSNR (dB) | 19.3473 | 23.7121 | 24.2754 | 26.4571 | 27.6479 | |
| ISNR (dB) | 4.7412 | 9.2154 | 9.7020 | 11.7501 | 12.8999 | |
| Runtime (s) | 0.0143 | 0.0464 | 0.1459 | 0.4298 | 1.5775 | |
| Sing | MSE | 34.2950 | 74.0754 | 64.1788 | 81.2321 | 67.2775 |
| MAE | 2.9835 | 3.7794 | 3.3283 | 4.2714 | 3.7723 | |
| MAXE | 45.1892 | 72.1926 | 108.9616 | 96.0850 | 249.2586 | |
| PSNR (dB) | 38.8331 | 41.5093 | 48.1527 | 53.1499 | 59.9891 | |
| ISNR (dB) | 11.6169 | 11.5691 | 15.0885 | 16.9605 | 20.7632 | |
| Runtime (s) | 0.0648 | 0.3062 | 1.5391 | 6.0509 | 27.8120 | |
| Algorithms | s | Additional | ||||
|---|---|---|---|---|---|---|
| PSO | 50 | 50 | 0.9 | 0.4 | 2 | |
| GA | 50 | 50 | / | / | / | |
| EPSPSO | 50 | 0.9 | 0.4 | 2 | ||
| MSPSO | 50 | 0.9 | 0.4 | 2 |
| Signal | Statistic | PSO | GA | EPS-PSO | MSPSO |
|---|---|---|---|---|---|
| Mean | 0.0850 | 0.0852 | 0.0850 | 0.0850 | |
| Best | 0.0849 | 0.0849 | 0.0849 | 0.0849 | |
| Blocks | Worst | 0.0854 | 0.0856 | 0.0854 | 0.0854 |
| Std. Dev. | |||||
| Median | 0.0849 | 0.0854 | 0.0849 | 0.0849 | |
| Mean | 0.0181 | 0.0181 | 0.0181 | 0.0182 | |
| Best | 0.0181 | 0.0181 | 0.0181 | 0.0181 | |
| Bumps | Worst | 0.0187 | 0.0184 | 0.0181 | 0.0189 |
| Std. Dev. | |||||
| Median | 0.0181 | 0.0181 | 0.0181 | 0.0181 | |
| Mean | 0.0027 | 0.0027 | 0.0027 | 0.0027 | |
| Best | 0.0027 | 0.0027 | 0.0027 | 0.0027 | |
| Doppler | Worst | 0.0027 | 0.0028 | 0.0027 | 0.0028 |
| Std. Dev. | |||||
| Median | 0.0027 | 0.0027 | 0.0027 | 0.0027 | |
| Mean | 0.1131 | 0.1150 | 0.1100 | 0.1144 | |
| Best | 0.1070 | 0.1070 | 0.1070 | 0.1070 | |
| HeaviSine | Worst | 0.1330 | 0.1330 | 0.1330 | 0.1333 |
| Std. Dev. | |||||
| Median | 0.1070 | 0.1070 | 0.1070 | 0.1070 | |
| Mean | 7.0609 | 7.0632 | 7.0628 | 7.0609 | |
| Best | 7.0609 | 7.0609 | 7.0609 | 7.0609 | |
| Piece-Regular | Worst | 7.0609 | 7.1043 | 7.0848 | 7.0609 |
| Std. Dev. | |||||
| Median | 7.0609 | 7.0609 | 7.0609 | 7.0609 | |
| Mean | 65.6770 | 65.0317 | 65.0584 | 65.3961 | |
| Best | 64.1788 | 64.1788 | 64.1788 | 64.1788 | |
| Sing | Worst | 68.8607 | 68.8607 | 68.8607 | 68.8607 |
| Std. Dev. | 2.2062 | 1.7989 | 1.8182 | 2.0745 | |
| Median | 64.1788 | 64.1788 | 64.1788 | 64.1788 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lopac, N.; Jurdana, I.; Lerga, J.; Wakabayashi, N. Particle-Swarm-Optimization-Enhanced Radial-Basis-Function-Kernel-Based Adaptive Filtering Applied to Maritime Data. J. Mar. Sci. Eng. 2021, 9, 439. https://doi.org/10.3390/jmse9040439
Lopac N, Jurdana I, Lerga J, Wakabayashi N. Particle-Swarm-Optimization-Enhanced Radial-Basis-Function-Kernel-Based Adaptive Filtering Applied to Maritime Data. Journal of Marine Science and Engineering. 2021; 9(4):439. https://doi.org/10.3390/jmse9040439
Chicago/Turabian StyleLopac, Nikola, Irena Jurdana, Jonatan Lerga, and Nobukazu Wakabayashi. 2021. "Particle-Swarm-Optimization-Enhanced Radial-Basis-Function-Kernel-Based Adaptive Filtering Applied to Maritime Data" Journal of Marine Science and Engineering 9, no. 4: 439. https://doi.org/10.3390/jmse9040439
APA StyleLopac, N., Jurdana, I., Lerga, J., & Wakabayashi, N. (2021). Particle-Swarm-Optimization-Enhanced Radial-Basis-Function-Kernel-Based Adaptive Filtering Applied to Maritime Data. Journal of Marine Science and Engineering, 9(4), 439. https://doi.org/10.3390/jmse9040439