Design of a Measuring Device and Winch Structure for Detecting the Distance and Direction of Two Seabed Pipelines

Abstract
:1. Introduction
2. Design of the Structure of the Measuring Device and Winch
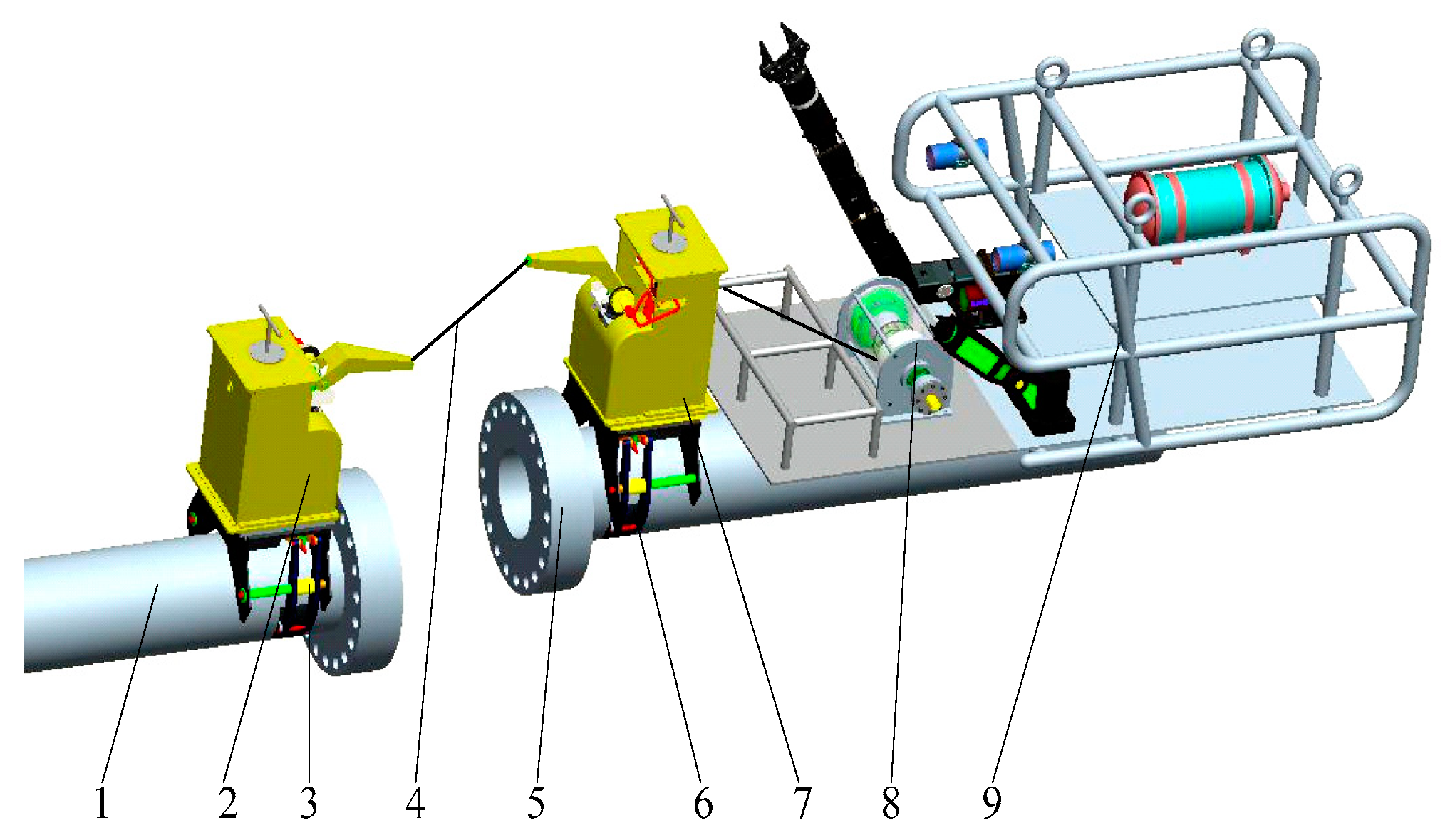
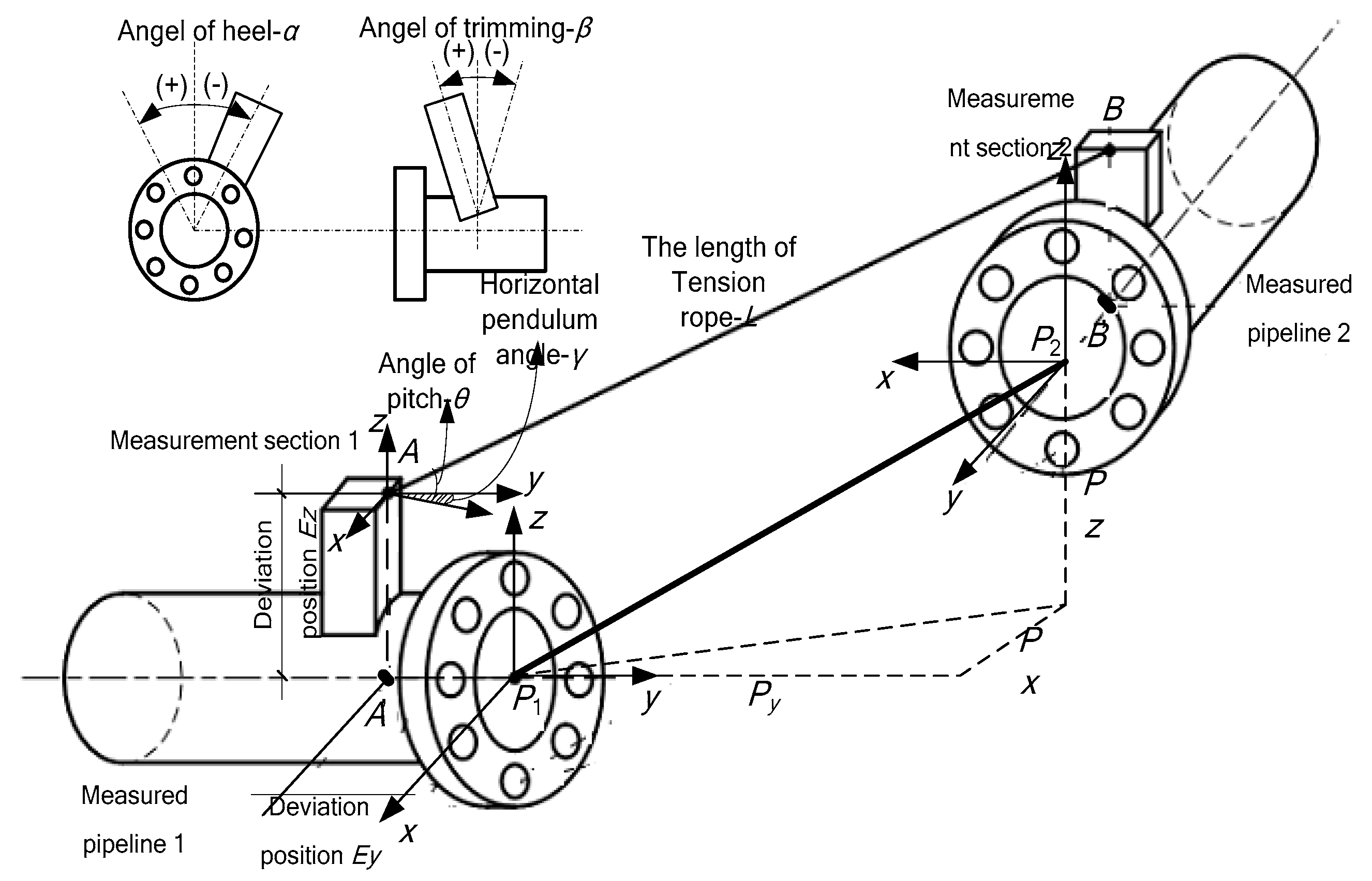
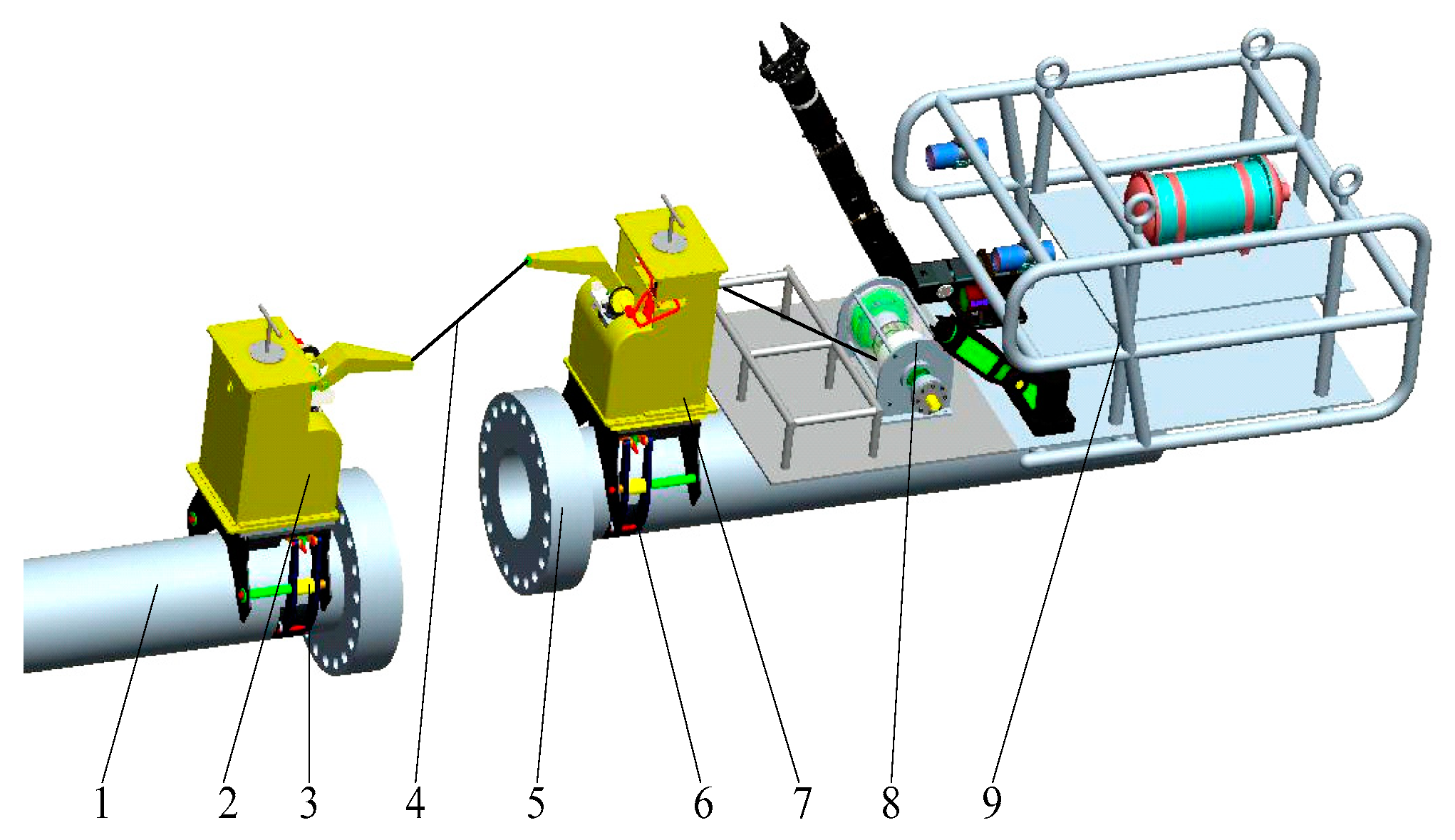
2.1. Structure of Measuring Device
2.2. Analysis of Tension State of the Detection Rope
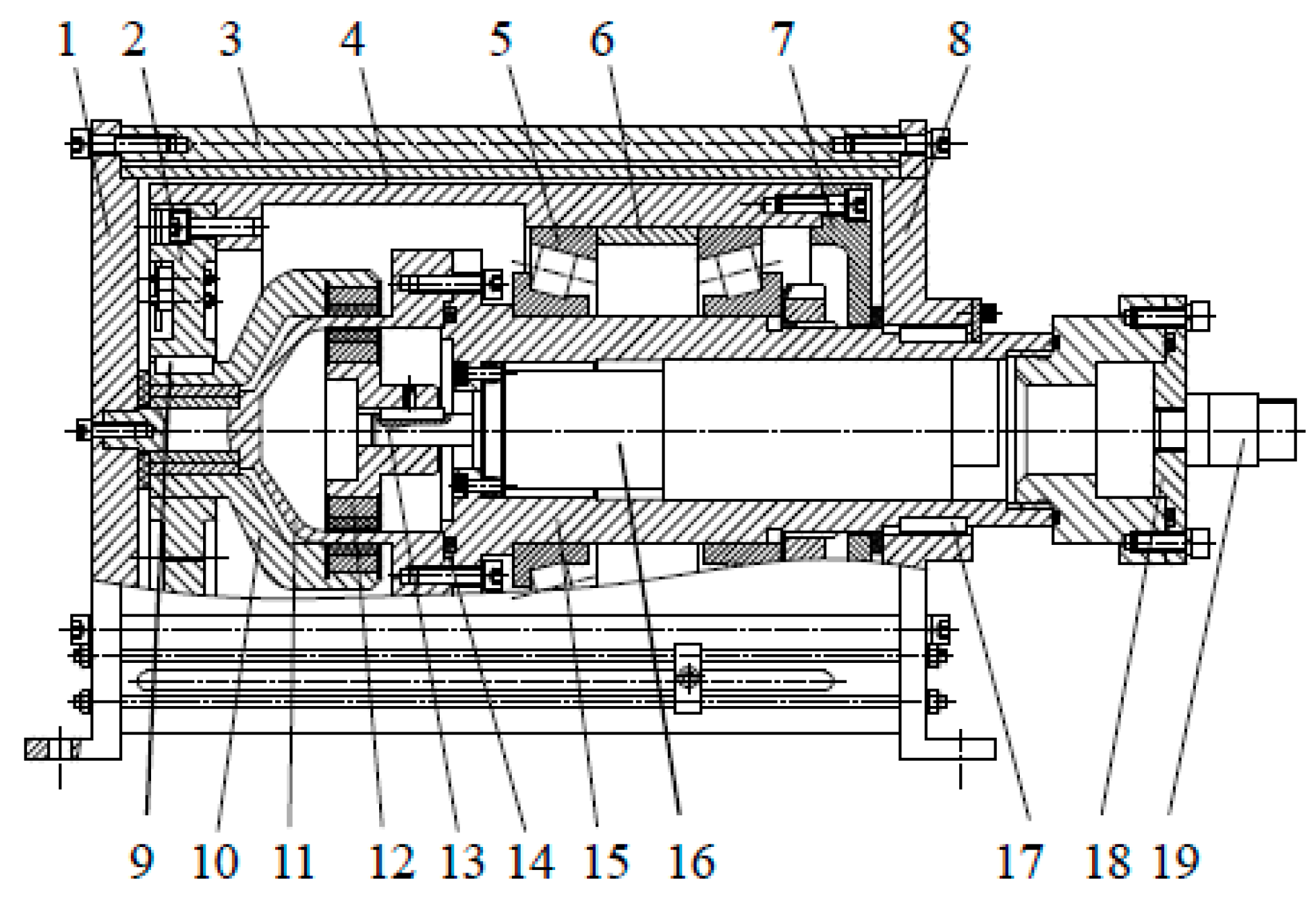
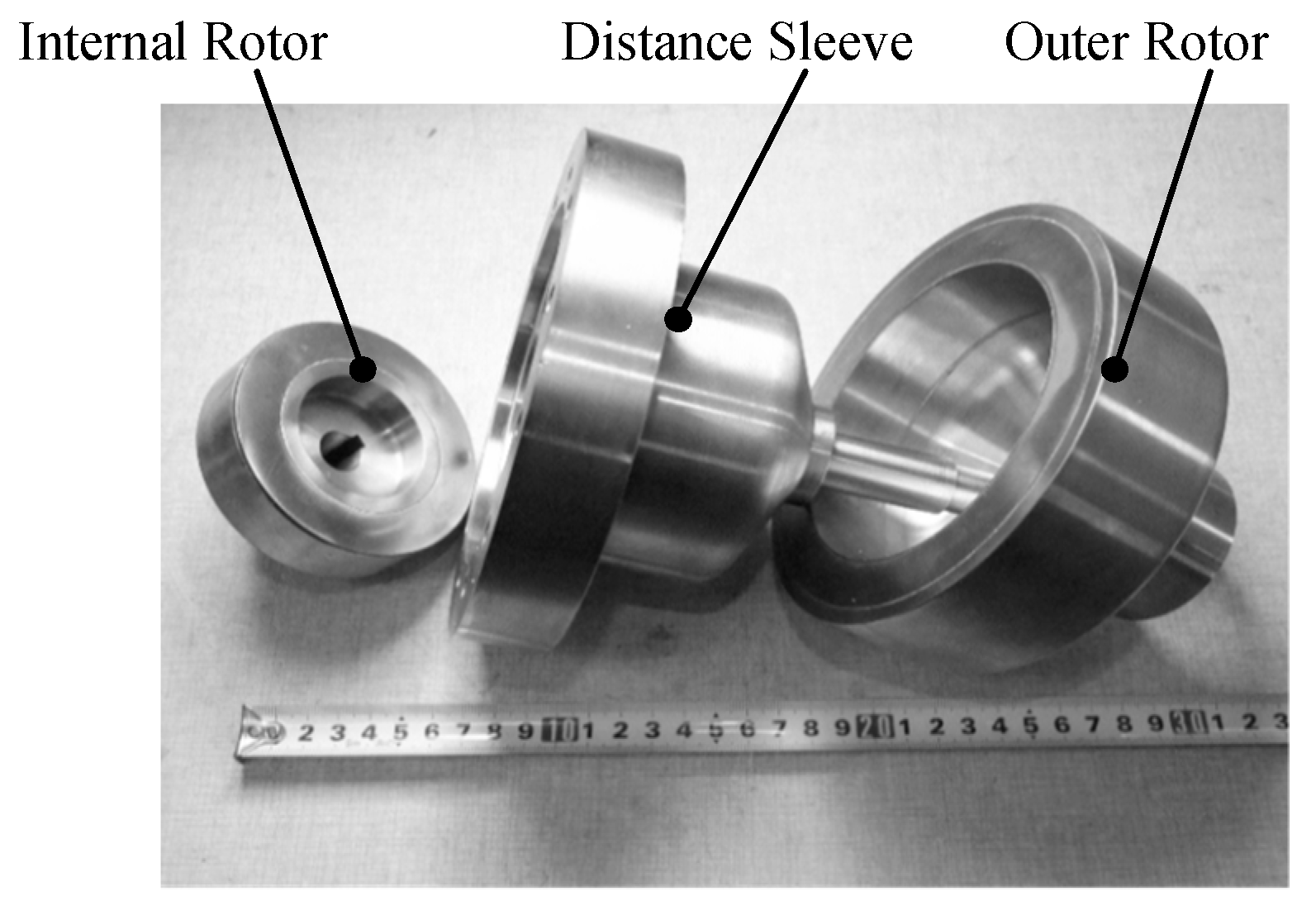
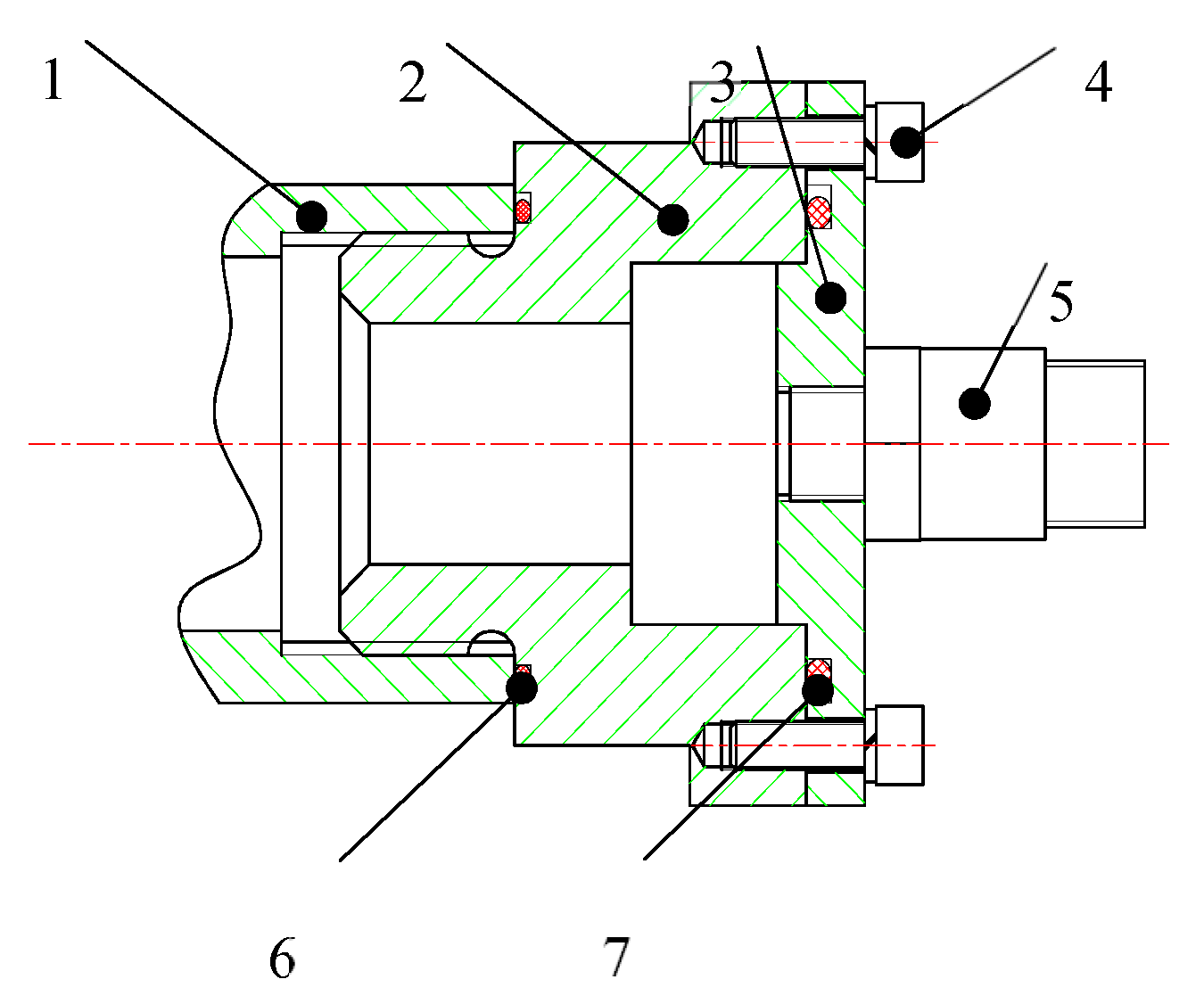
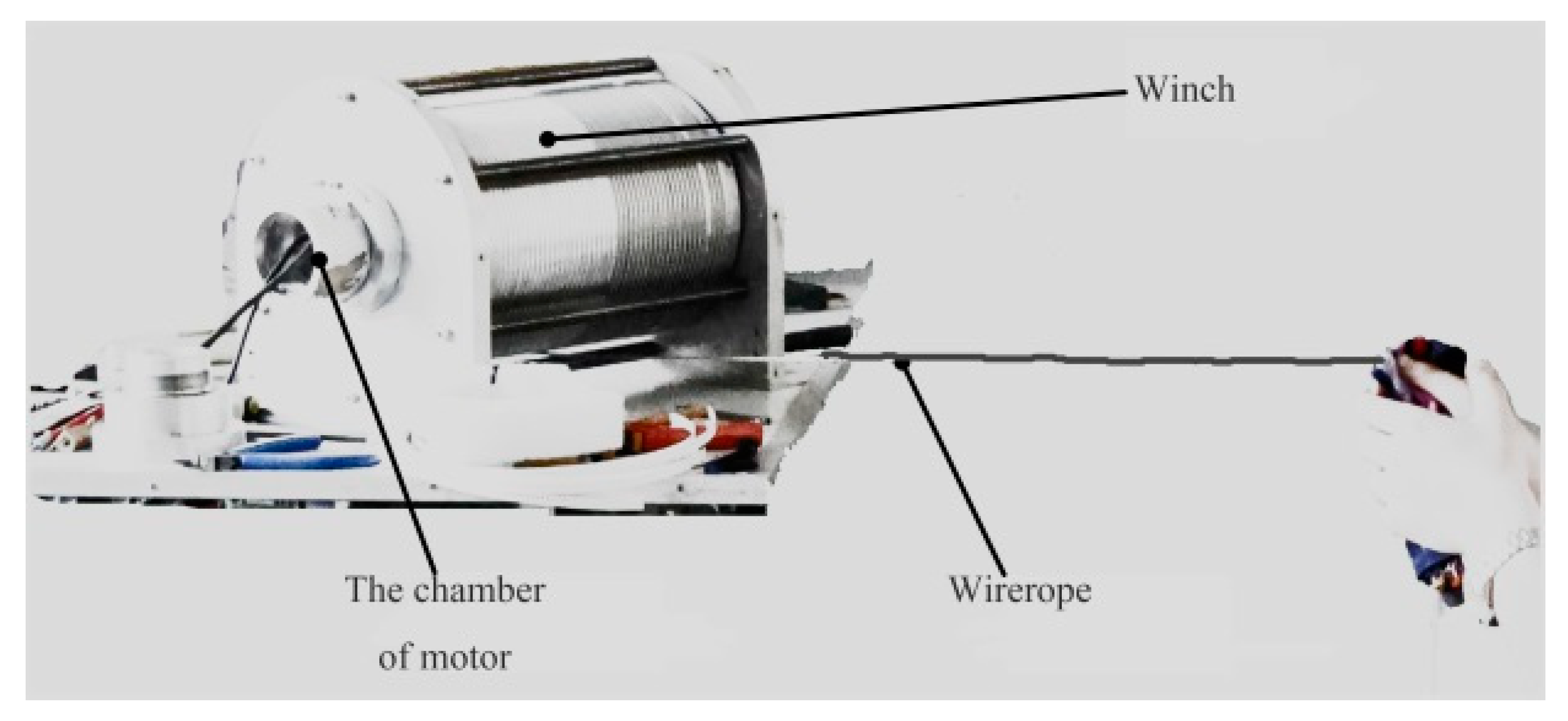
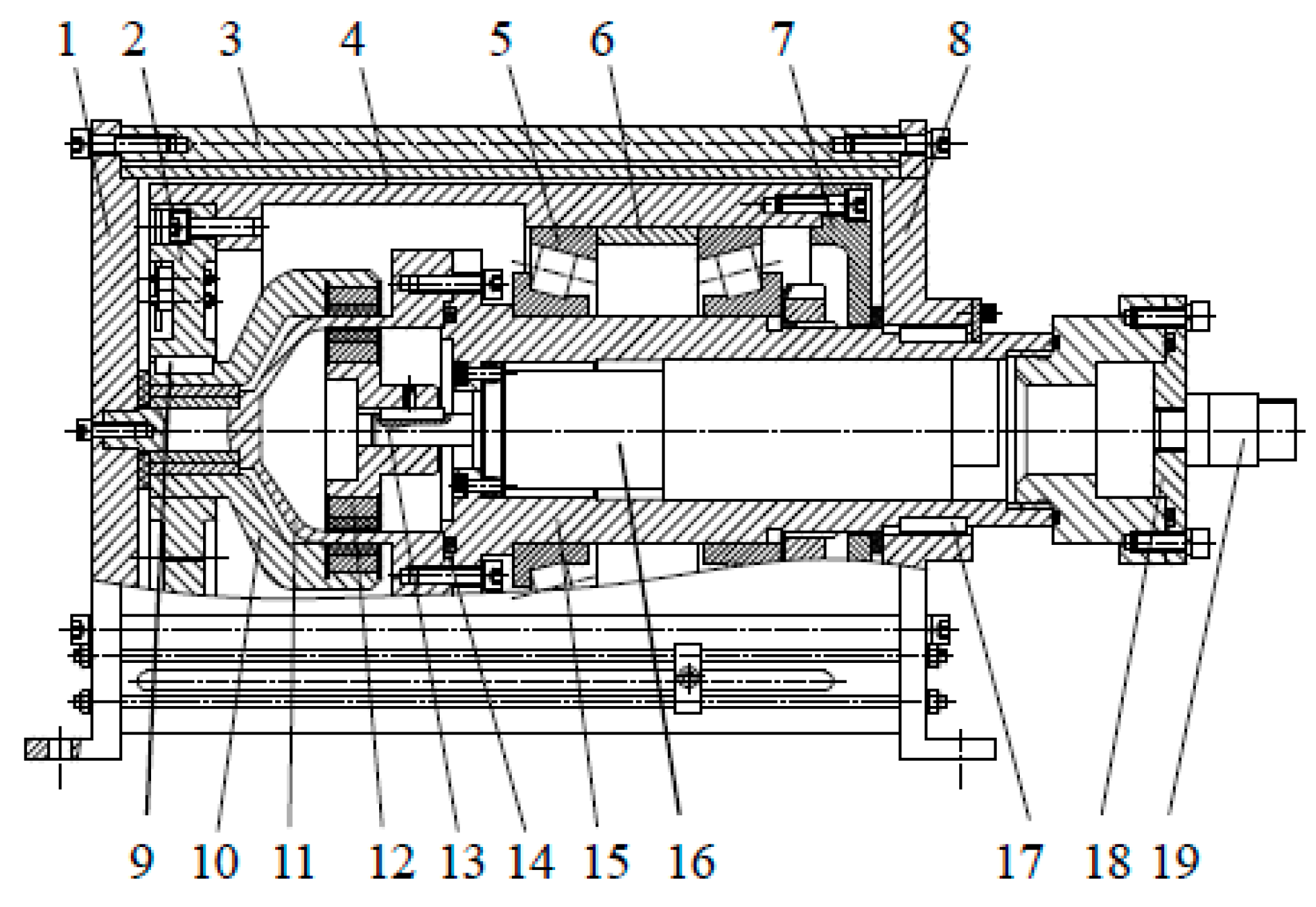
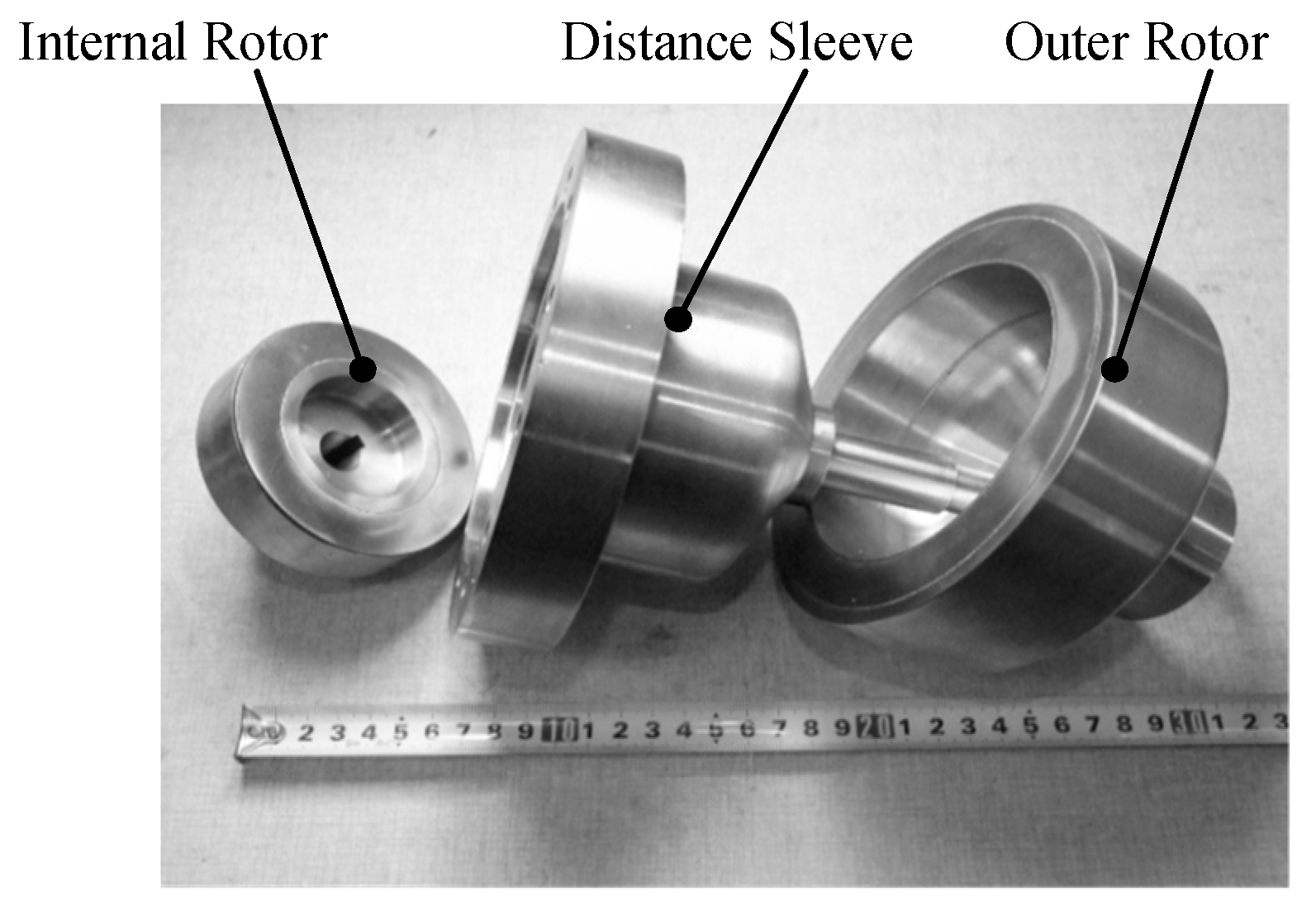
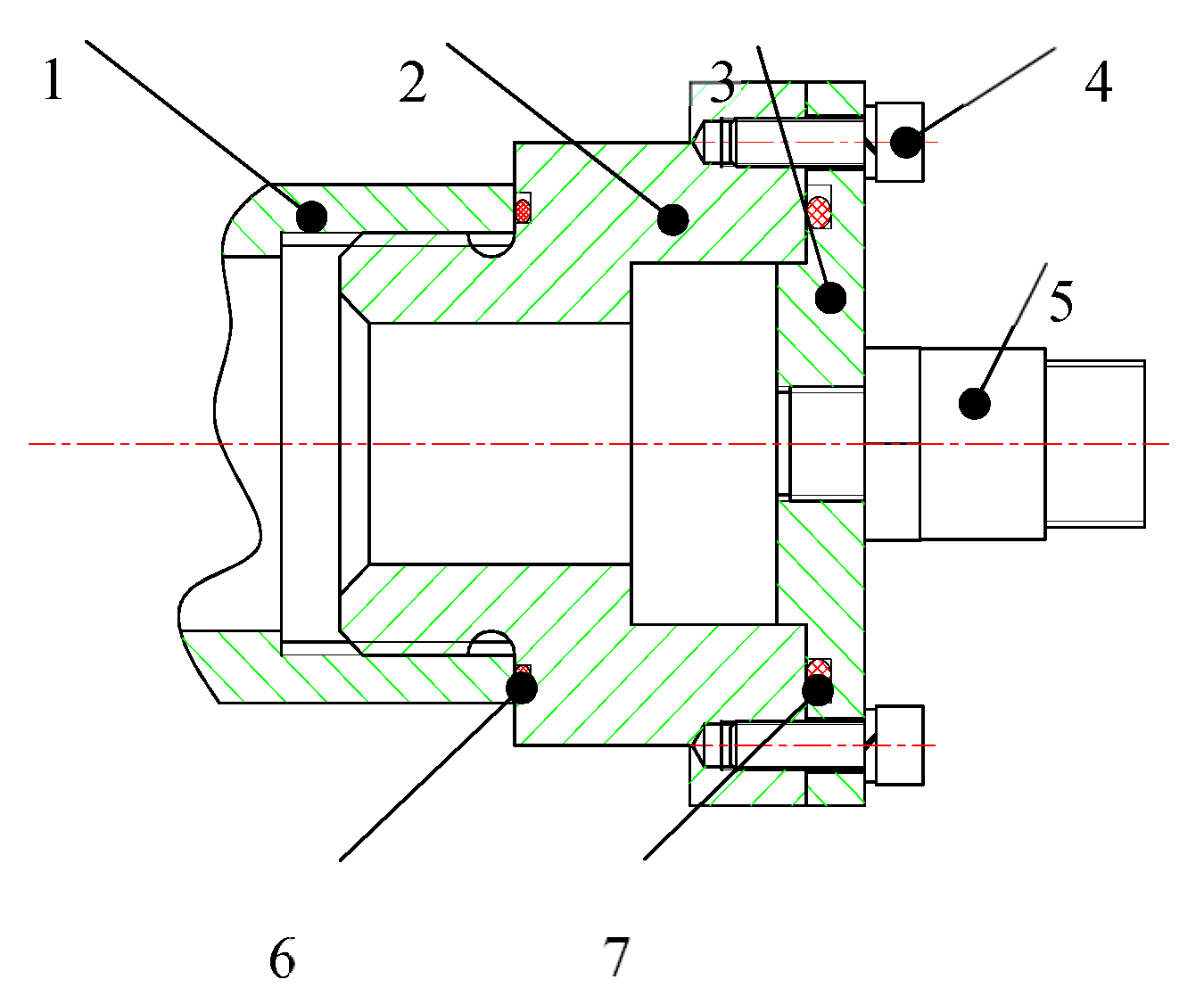
2.3. Total Winch Design Scheme
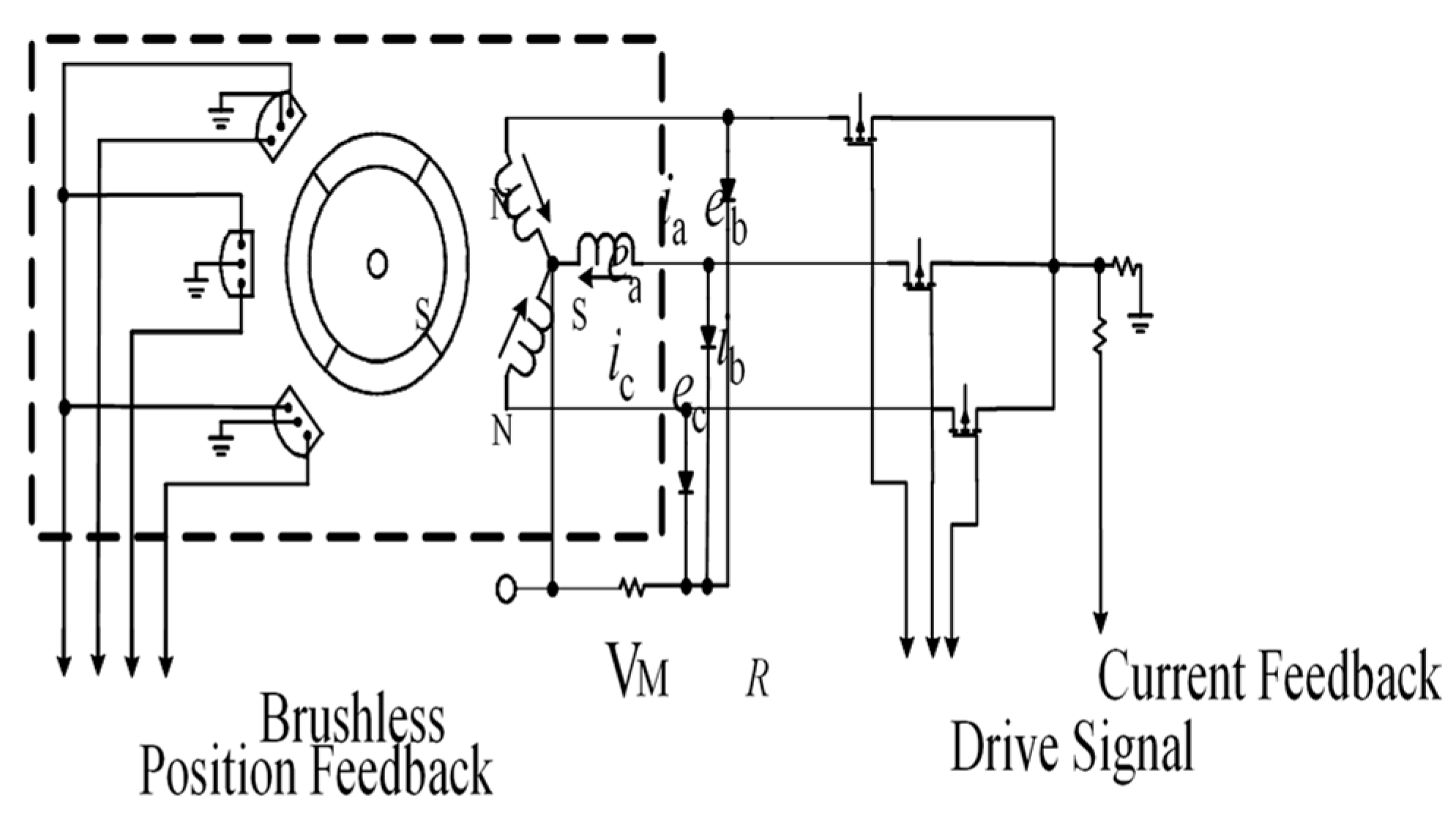
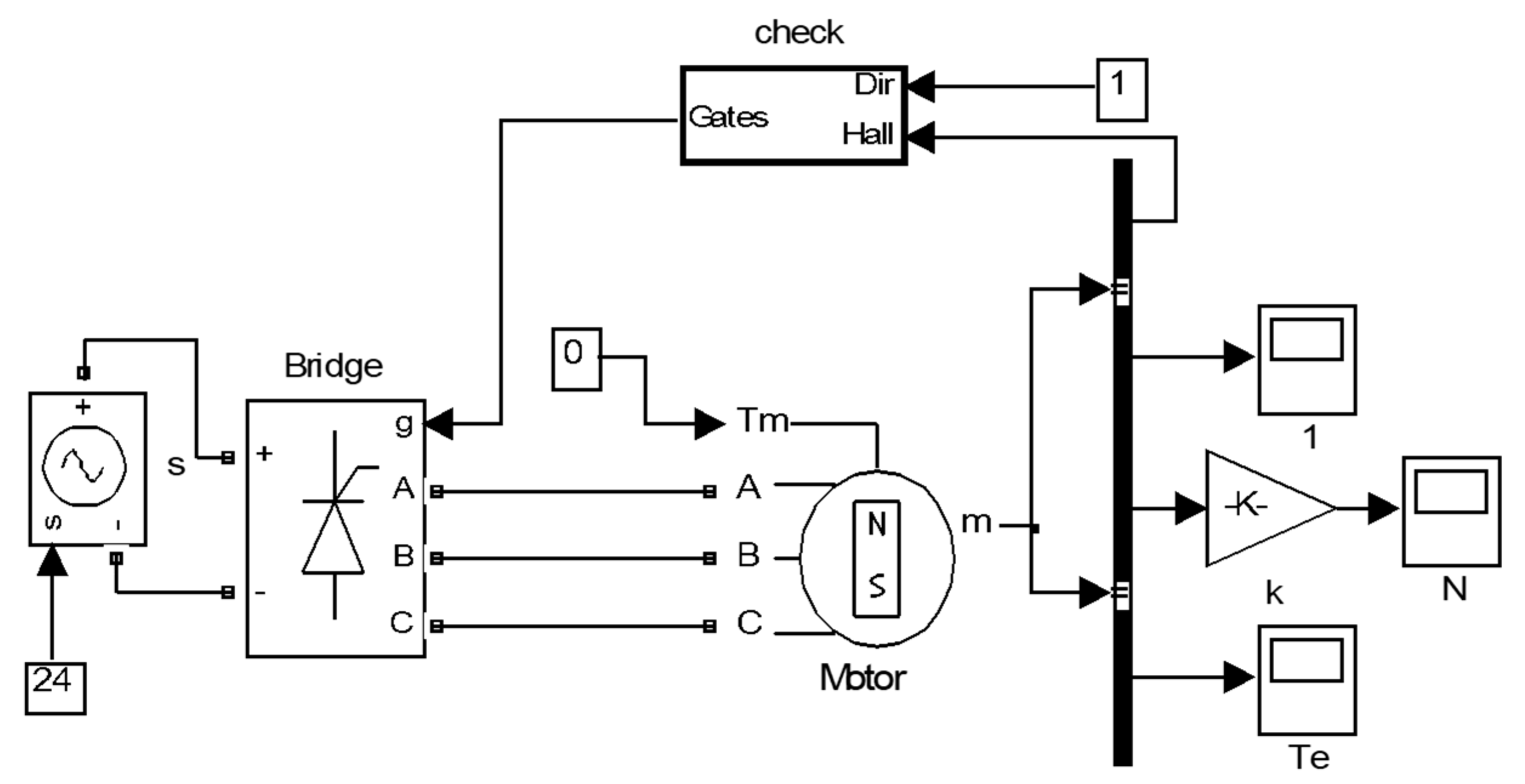
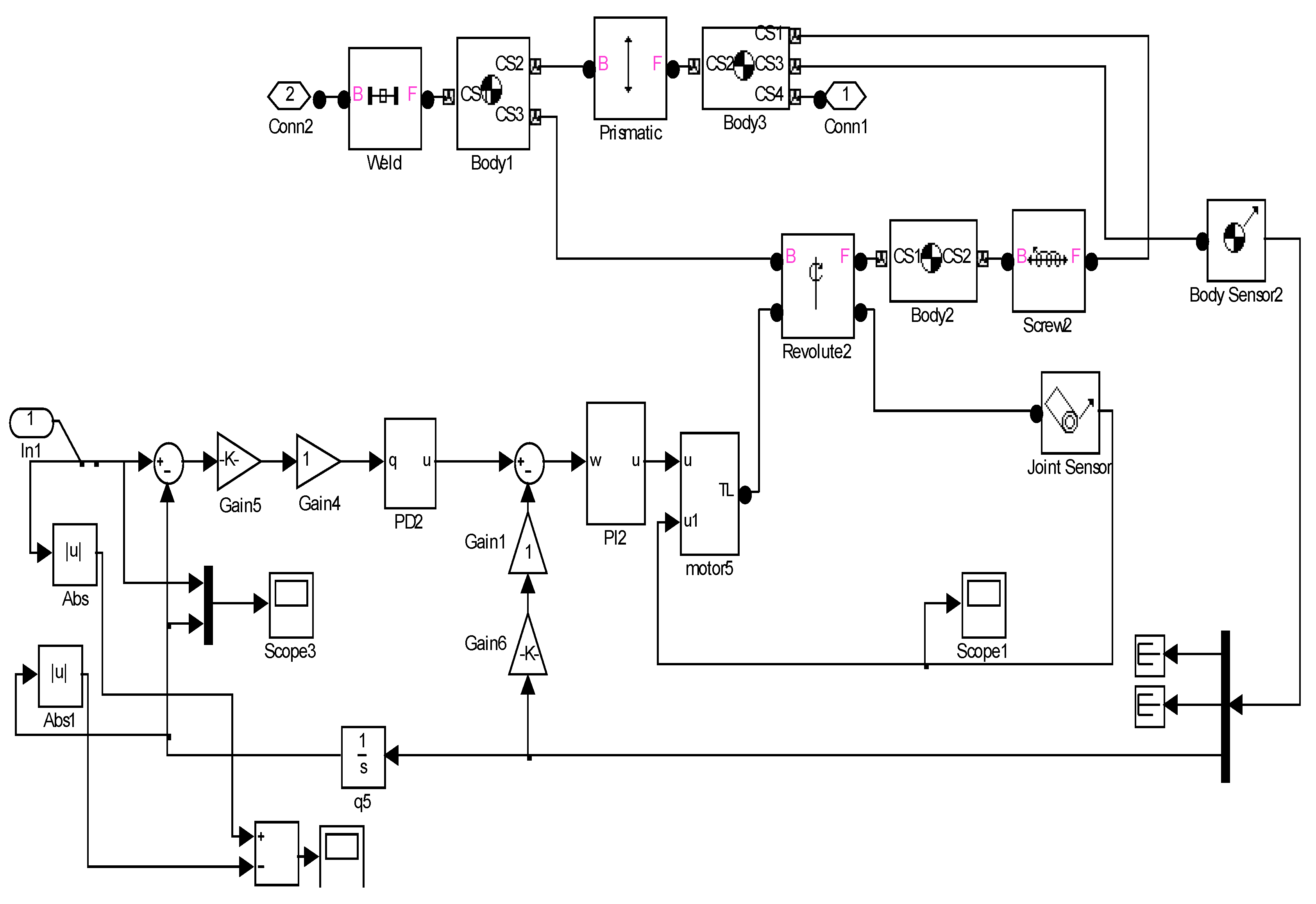
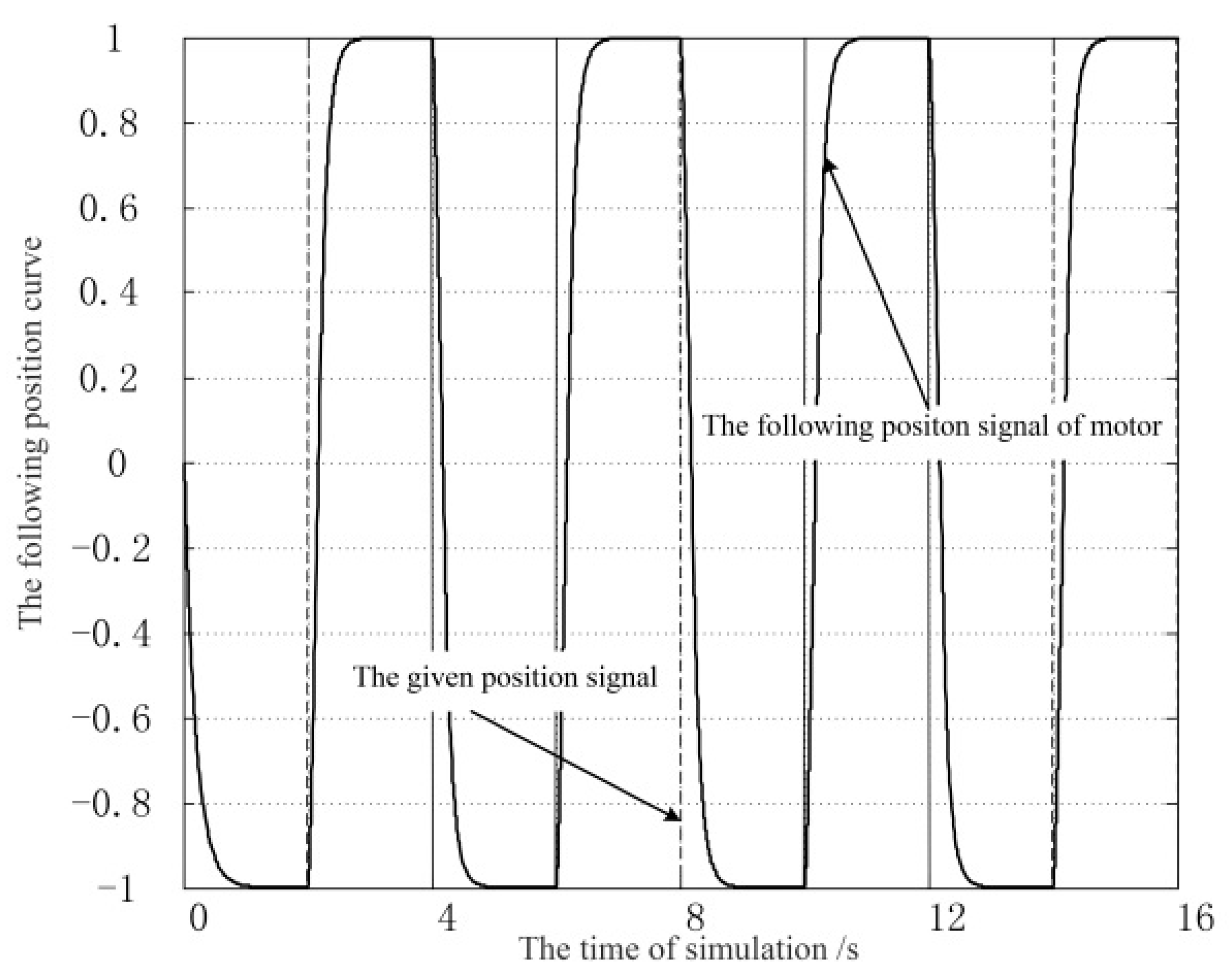
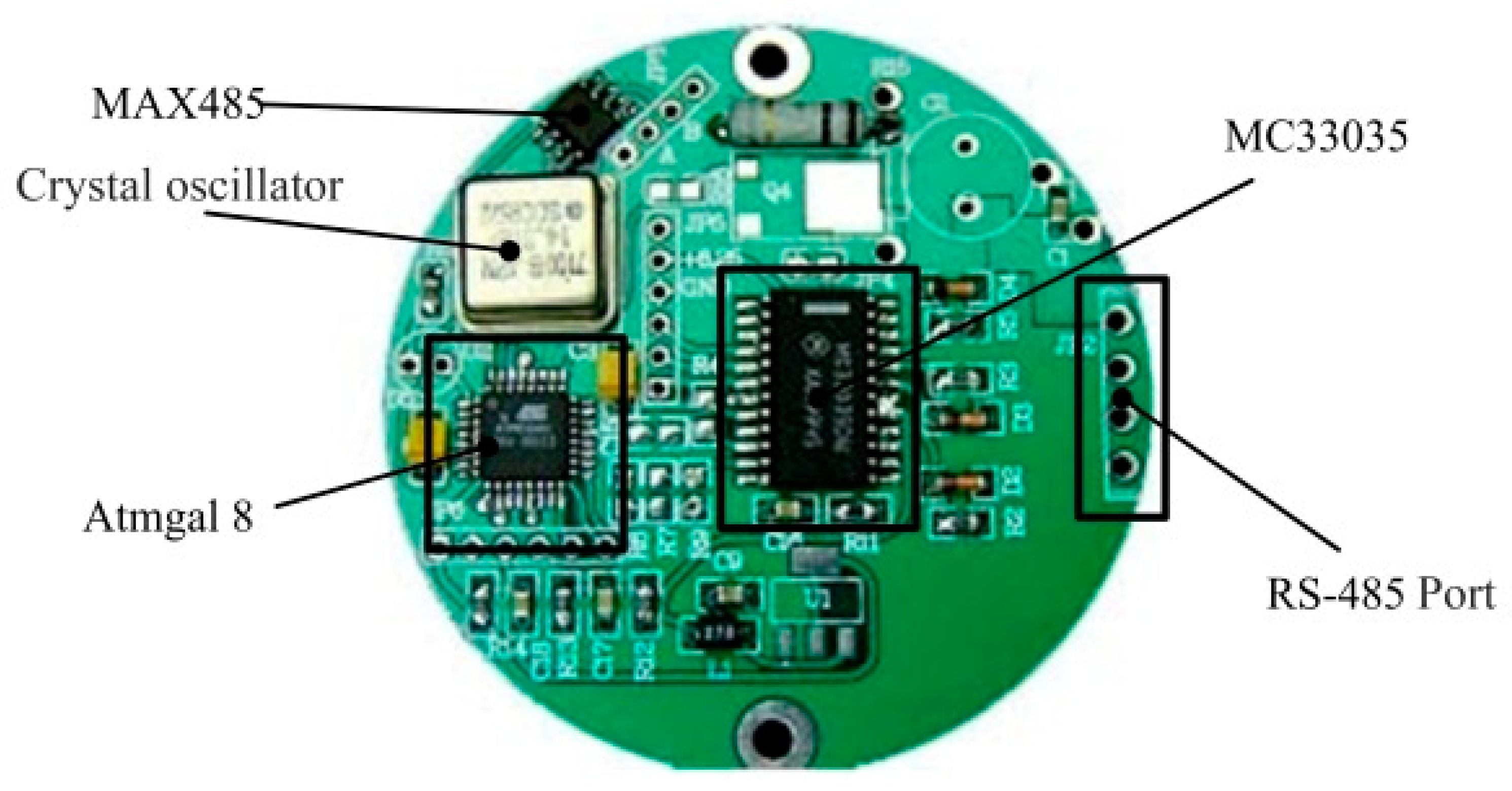
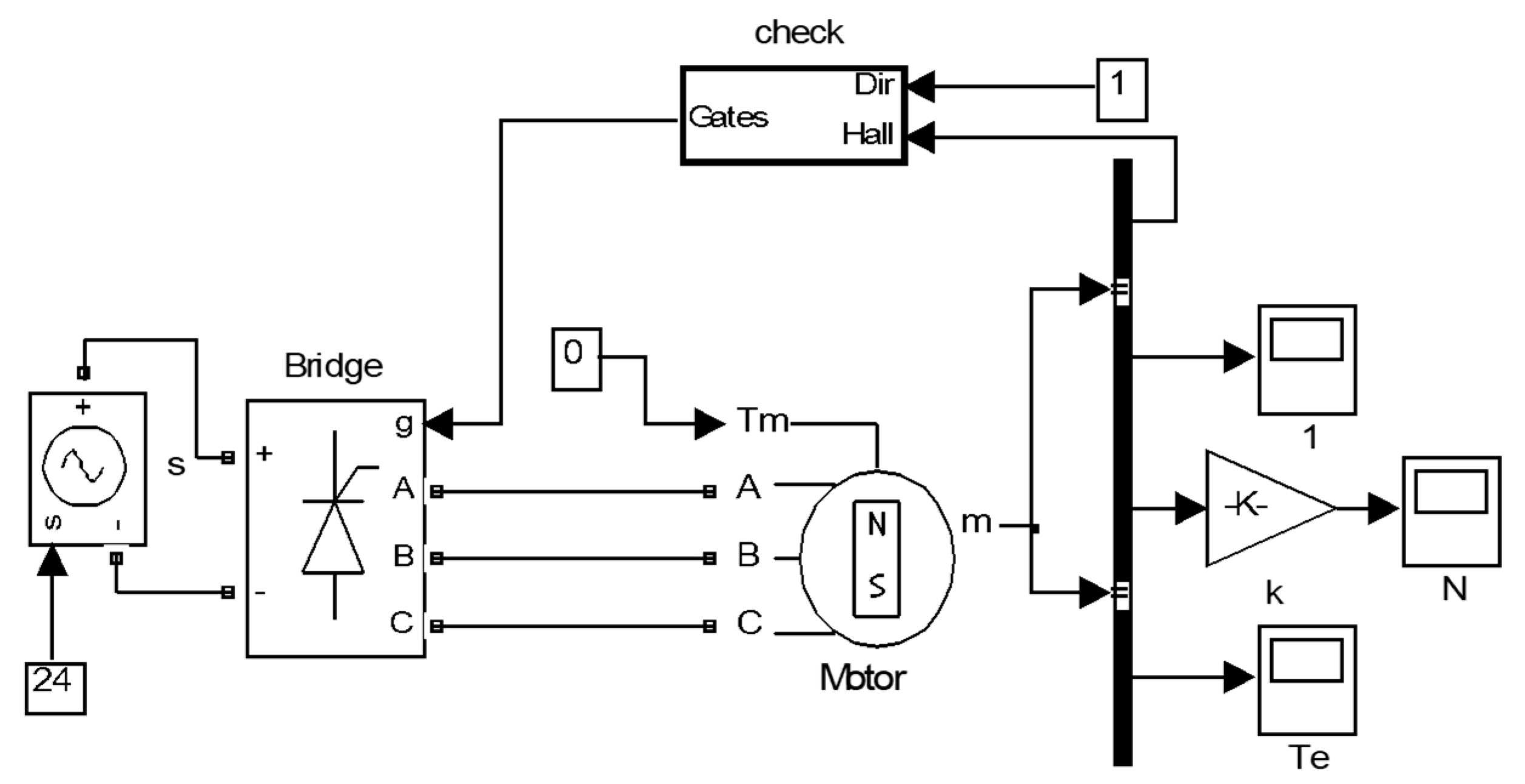
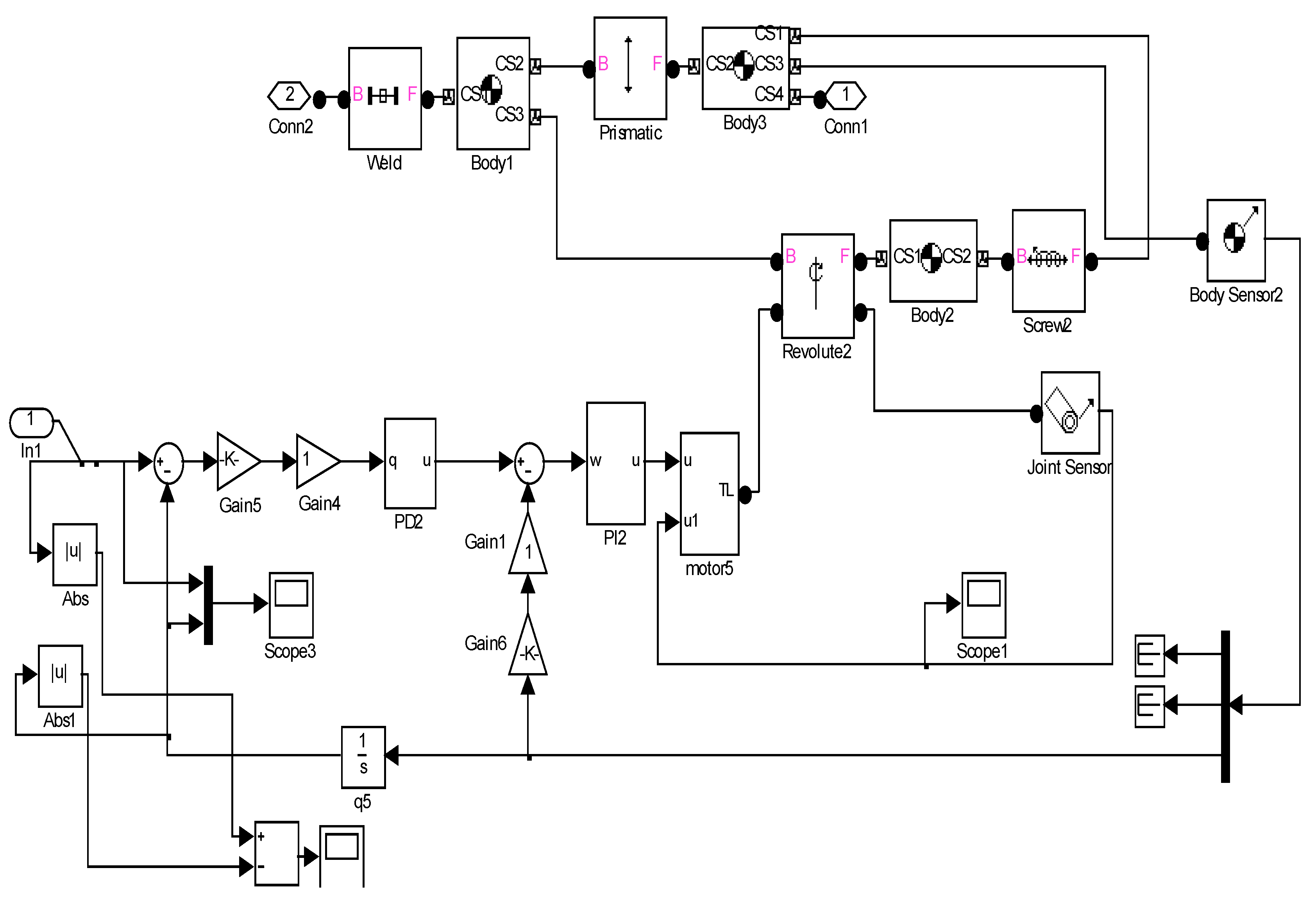
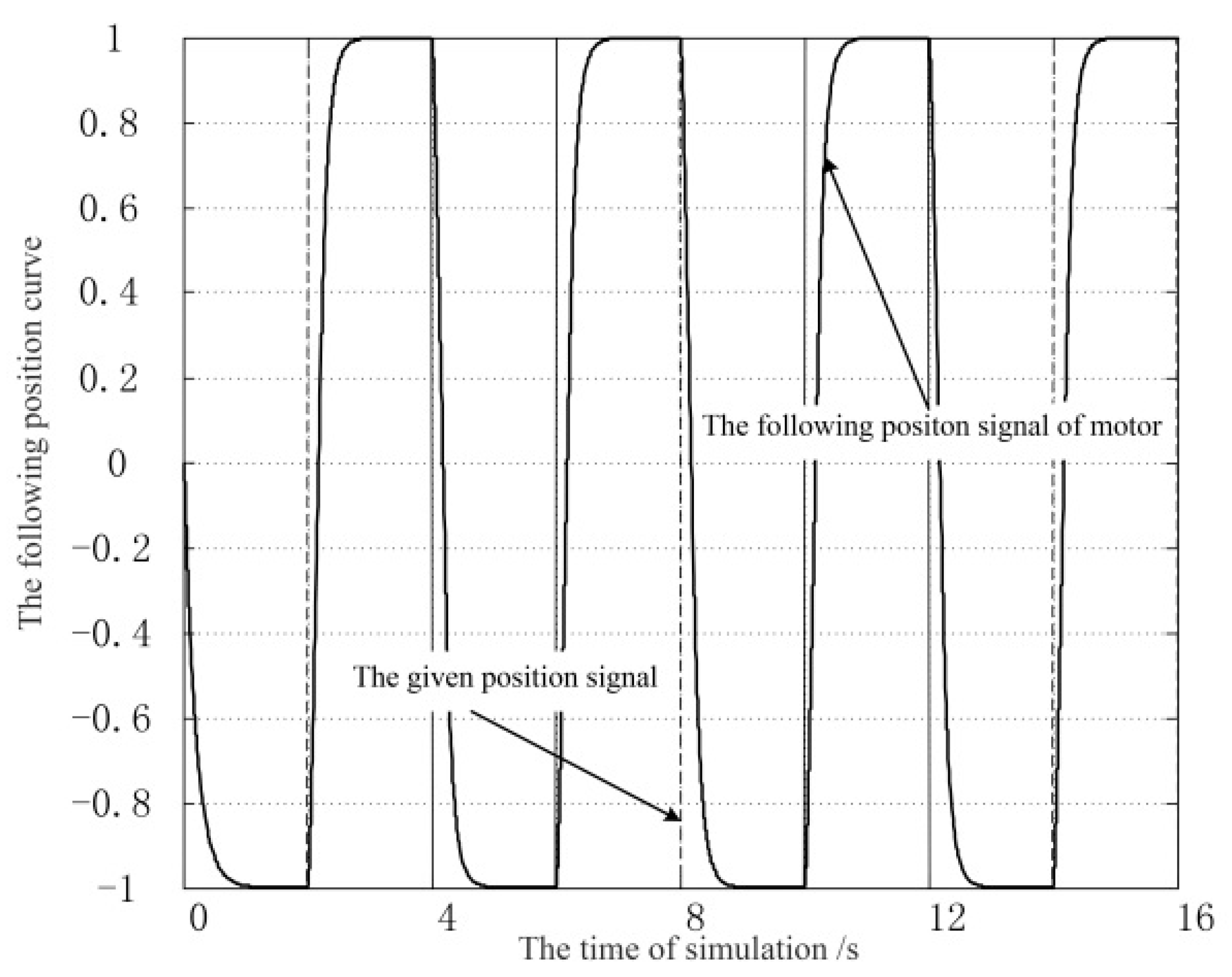
3. Motor Control Simulation and Rope Pulling Force Experiments
4. High-Pressure Experiment
- (1)
- We placed the machine into the pressure chamber and installed the cover;
- (2)
- We first slowly increased the pressure to 10 MPa and held for 45 min, then slowly raised the pressure to 15 MPa for a period of 30 min, and then slowly increased the pressure to 20 MPa for a period of 30 min;
- (3)
- Pressure was relieved;
- (4)
- We removed the equipment to check for collapse or seal failure and checked if the sensor and winch operated normally;
5. Underwater Measurement Test
- (1)
- After the device was calibrated on land, the device was moved to a certain direction to be fixed, and a set of relative pose data values of the two pipelines were measured;
- (2)
- (3)
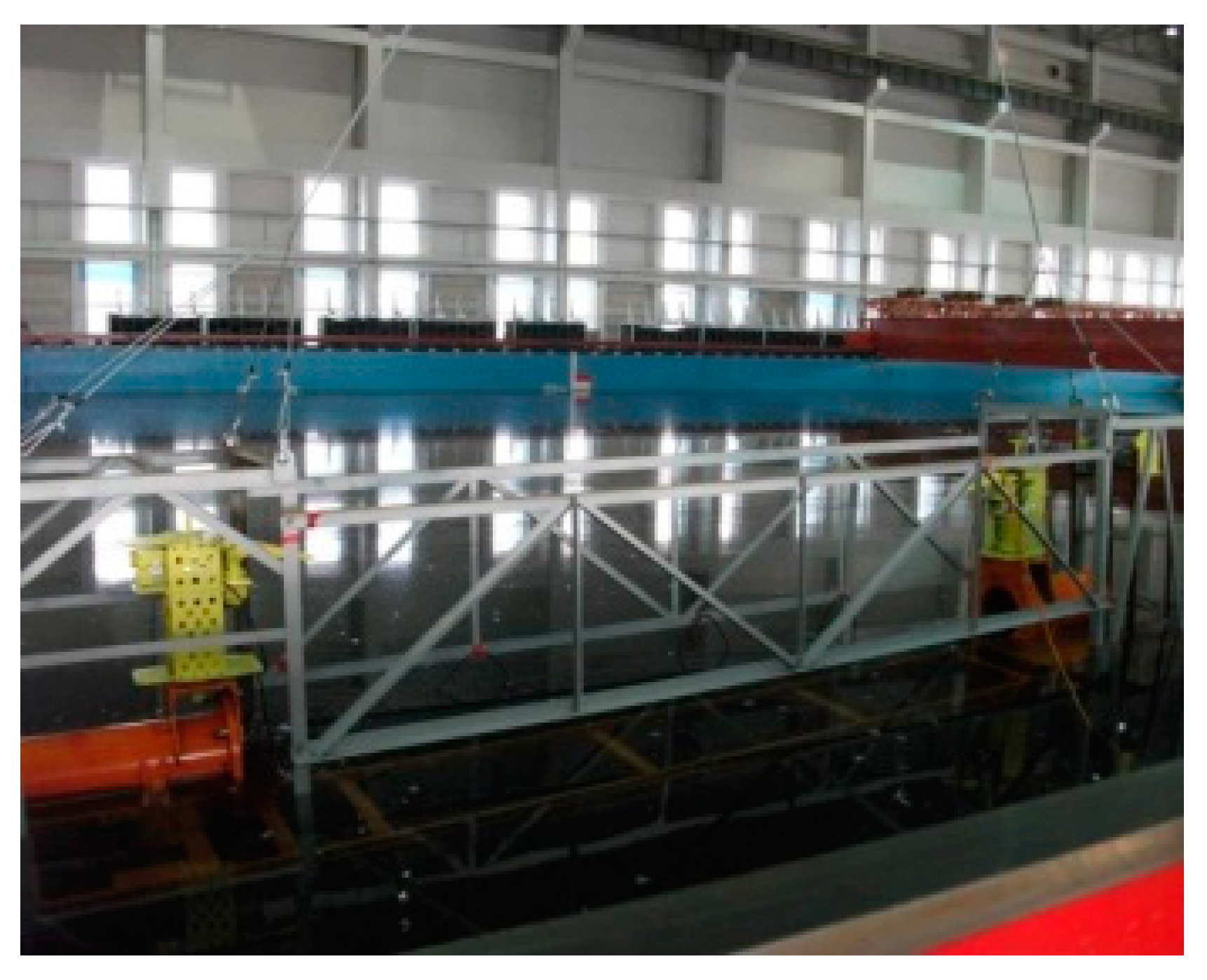
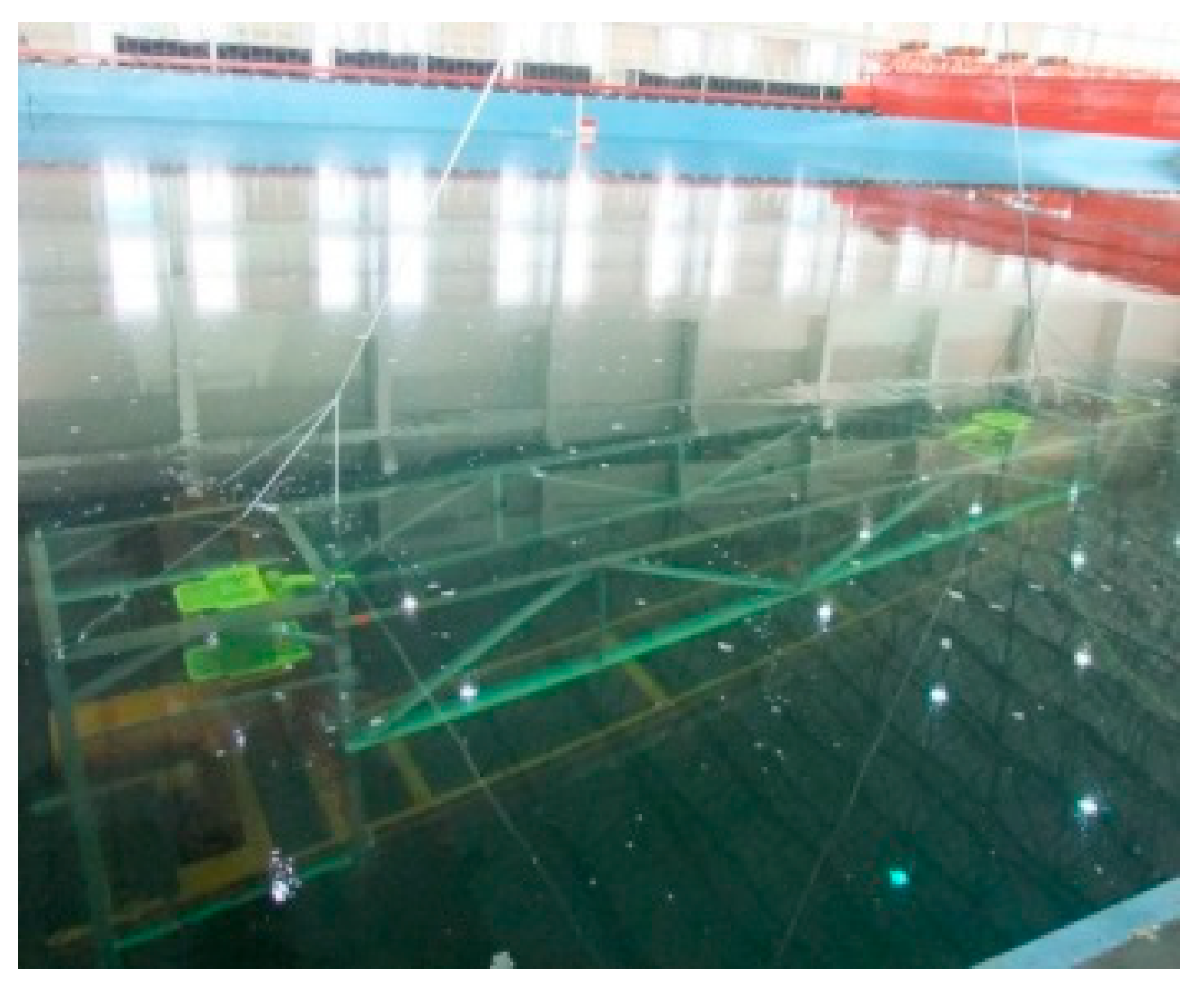
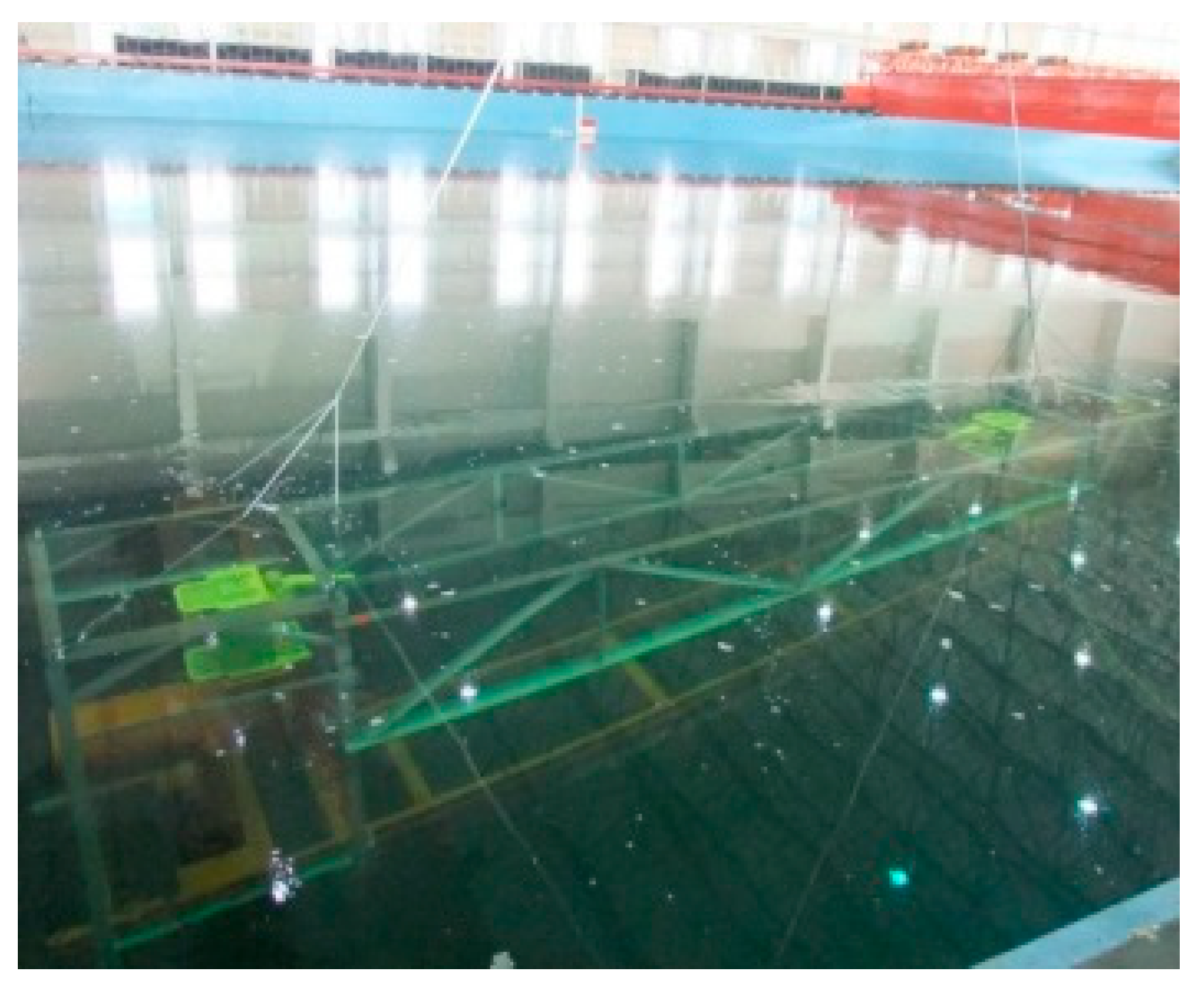
- After the experiment platform was placed at the bottom of the tank, we adjusted the pool to maintain a certain flow, then we tensioned the test rope through the monitoring interface. The pose data are provided in Table 4. The results were compared with those of onshore experiments; and
- (4)
- After confirming the experimental data precision met the requirements, we lifted the experimental platform up and then the water tank experiment completed.
6. Conclusions
- (1)
- The device can fulfill the distance and measurement accuracy requirements for two submarine pipelines, and provide length and direction parameters for connecting pipelines.
- (2)
- The performance of the winch is directly related to the testing accuracy of the device. The magnetic coupling coupler provides the winch with stable tension so the measurement device can achieve the desired measurement accuracy, which verifies the design.
- (3)
- The magnetic coupling coupler improves the seal structure of the winch, which converts the dynamic seal into a static seal so that the winch performs well in deep water and has a simple structure.
Author Contributions
Funding
Conflicts of Interest
References
- Wang, W.M. The Research and Development of Deep Sea Pipeline Position and Attitude Measurement System. Ph.D. Thesis, Harbin Engineering University, Harbin, China, 3 November 2011. [Google Scholar]
- Zhang, B.Z. Structural Design & Prototype Development on Deep-water Pipelines Position Measuring Device. Master’s Thesis, Harbin Engineering University, Harbin, China, 15 March 2011. [Google Scholar]
- Wu, L. Study on Detection System of Deep-water Pipeline Pose Measuring Device. Master’s Thesis, Harbin Engineering University, Harbin, China, 15 March 2011. [Google Scholar]
- Guo, J.H. Use and maintenance of the slip ring combined seal. Constr. Mach. Maint. 1996, 2, 35–37. [Google Scholar]
- Kang, S.Q.; Wang, D.T.; Zhu, G.H. Application of mechanical seal in underwater vehicle. Robot 1993, 5, 500–513. [Google Scholar]
- Yang, D.; Peng, B. Research on dynamic seal technology of torpedo tail shaft. Torpedo Technol. 1999, 3, 19–22. [Google Scholar]
- Cong, M.; Wen, H.Y.; Du, Y.; Dai, P.L. Coaxial Twin-shaft Magnetic Fluid Seals Applied in Vacuum Wafer-Handling Robot. Chin. J. Mech. Eng. 2012, 4, 706–714. [Google Scholar] [CrossRef]
- Yang, E.X. Research into the Technology of Magnetic Fluid Seal at Stern Shaft. Master’s Thesis, Harbin Engineering University, Harbin, China, 15 March 2008. [Google Scholar]
- Yoshinori, M.; Christopher, A.D. Miniature magnetic fluid seal working in liquid environments. J. Magn. Magn. Mater. 2016, 1, 1–4. [Google Scholar]
- Zhong, X.Y.; Tan, Y.G. Dynamic sealing technology for underwater robot. Robot Technol. 2016, 1, 40–41. [Google Scholar]
- Qiao, B.P. Sealing Performance Analysis and Installation Process of Rectangular-shaped Slip Ring Combined Seal. Hydraul. Pneum. Seal. 2013, 12, 64–65. [Google Scholar]
- Zhang, B.; Wang, Z.; Zhang, B.Z.; Wu, L. Research on design method of winch driven by contactless magnetic coupling under Deep-water. J. Graph. 2015, 1, 8–13. [Google Scholar]
- Xu, Y.; Zhou, C.J. Application of Magnetic Technology in Underwater Seal and Detection. Electron. Sci. Technol. 2014, 10, 163–168. [Google Scholar]
- Liu, T.G.; Yang, Z.Y. A New Design of Magnetic Fluid Seal for Liquids. J. China Univ. Min. Technol. 2005, 4, 366–369. [Google Scholar]
- Shang, H.M. The Application of Magnetic Pole Coupling in the Underwater Motion Platform. Ocean Technol. 2006, 1, 43–44. [Google Scholar]
- Wen, L.H.; Wang, Q.C. Magnetic drive seal submersible motor. Mar. Electr. Electron. Technol. 2002, 4, 14–19. [Google Scholar]
- Tang, M.H. Radar Servo System Design Based on Brushless DC Motor. Radar Sci. Technol. 2009, 6, 479–484. [Google Scholar]
- Huang, P.; Yi, G. Research on High Power Brushless DC Motor Servo Control System Based on DSP. Master’s Thesis, Northwestern Polytechnical University, Xi’an, China, March 2007. [Google Scholar]
- Li, G.W. Research on Direct Torque Control of Brushless DC Motor. Master’s Thesis, Taiyuan University of Science and Technology, Taiyuan, China, March 2009. [Google Scholar]
- Dou, X.S.; Zhao, K.Z.; Xu, C.H. Magnetic Circuit Analysis and Magnetic Torque Calculation of Magnetic Drive Technology. Chem. Mach. 2004, 6, 357–360. [Google Scholar]
- Luan, C.Y. Ansys Analysis and Strength Calculation of Pressure Vessel; China Water Power Press: Beijing, China, 2008. [Google Scholar]
- Pillay, P.; Krishnan, R. Modeling, Simulation, and Analysis of Permanent-Magnet Motor Drives. II. The brushless DC motor drive. Ind. Appl. 1989, 2, 274–279. [Google Scholar] [CrossRef]
- Yong, L.; Zhu, Z.Q.; Howe, D. Direct torque control of brushless DC drives with reduced torque ripple. Ind. Appl. 2005, 41, 599–608. [Google Scholar]
- Peng, G.X. Study on the Control Methods of Permanent Magnet Brushless Motor. Master’s Thesis, Chongqing University, Chong Qing, China, March 2007. [Google Scholar]
- Tao, G.L.; Ma, Z.Y.; Zhou, L.B. Analysis of double-fed machine with the AC/DC/AC control strategy and its simulation. J. Huazhong Univ. Sci. Technol. Nat. Sci. Ed. 2003, 1, 83–95. [Google Scholar]
- Moseler, O.; Isermann, R. Application of model-based fault detection to a brushless DC motor. IEEE Trans. Ind. Electron. 2000, 5, 1015–1020. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Tension FT (N) | Spacing l (m) | ||||
|---|---|---|---|---|---|
| 5 | 10 | 20 | 30 | ||
| Sag f (m) | 0 | 30 | 80 | 230 | 380 |
| 0.01 | 25.7 | 67.9 | 214.9 | 361.6 | |
| 0.05 | 13.9 | 38.3 | 176.9 | 309.6 | |
| 0.1 | 7.5 | 30.6 | 124.3 | 254.4 | |
| 0.2 | 3.9 | 15.4 | 61.3 | 173.2 | |
| 0.3 | 2.6 | 10.3 | 40.9 | 121.8 | |
| Parameter | Value |
|---|---|
| Weight | 3 kg |
| Torque | 24 Nm |
| Voltage | 24 V |
| Electricity | 6.44 A |
| Rotation rate | 50 rpm |
| Shaft diameter | 15 mm |
| Tensile Force (N) | 40 | 50 | 60 | 70N | 80 | 90 | 100 | 120 | 140 |
| Deflection f (mm) | 858.2 | 760.1 | 620.5 | 496.6 | 471.7 | 453.1 | 441.9 | 438.4 | 432.1 |
| Sequence | Measuring Equipment I | Measuring Equipment II | Rope Length (mm) | ||||||
|---|---|---|---|---|---|---|---|---|---|
| αr (°) | βr (°) | γr (°) | θr (°) | αb (°) | βb (°) | γb (°) | θb (°) | ||
| Measurement on land | −2.03 | 1.40 | 0.84 | −0.26 | 2.14 | −1.64 | −0.09 | 0.40 | 4531.7 |
| Measurement under water | −1.99 | 1.39 | 0.97 | −0.04 | 2.13 | −1.66 | −0.22 | −0.18 | 4531.3 |
| Difference | −0.04 | 0.01 | −0.13 | −0.22 | 0.02 | 0.02 | 0.13 | 0.57 | 0.4 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, Z.; Lan, D.; Wang, T.; Zhang, B. Design of a Measuring Device and Winch Structure for Detecting the Distance and Direction of Two Seabed Pipelines. J. Mar. Sci. Eng. 2020, 8, 130. https://doi.org/10.3390/jmse8020130
Wang Z, Lan D, Wang T, Zhang B. Design of a Measuring Device and Winch Structure for Detecting the Distance and Direction of Two Seabed Pipelines. Journal of Marine Science and Engineering. 2020; 8(2):130. https://doi.org/10.3390/jmse8020130
Chicago/Turabian StyleWang, Zhuo, Di Lan, Tao Wang, and Bo Zhang. 2020. "Design of a Measuring Device and Winch Structure for Detecting the Distance and Direction of Two Seabed Pipelines" Journal of Marine Science and Engineering 8, no. 2: 130. https://doi.org/10.3390/jmse8020130
APA StyleWang, Z., Lan, D., Wang, T., & Zhang, B. (2020). Design of a Measuring Device and Winch Structure for Detecting the Distance and Direction of Two Seabed Pipelines. Journal of Marine Science and Engineering, 8(2), 130. https://doi.org/10.3390/jmse8020130