Implementation and Validation of a Potential Model for a Moored Floating Cylinder under Waves




Abstract
1. Introduction
2. Description of the Experiments
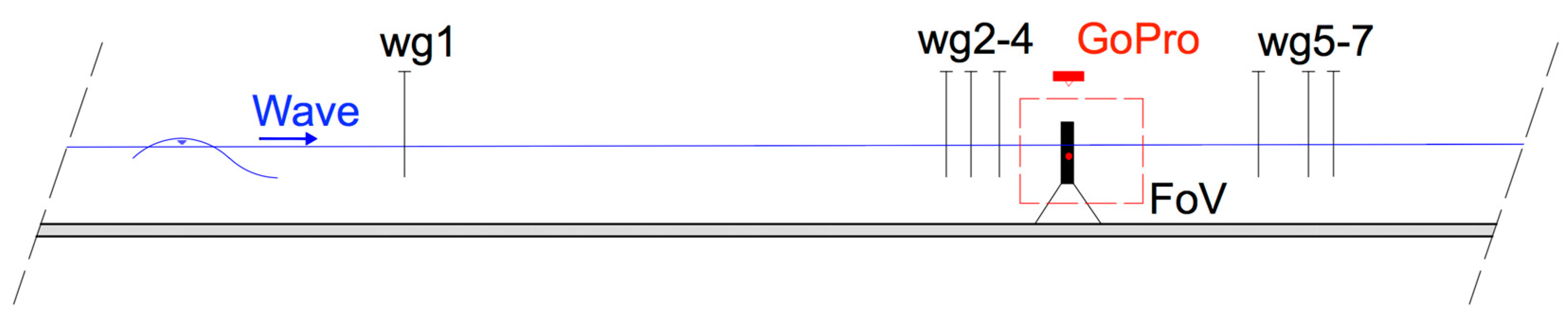
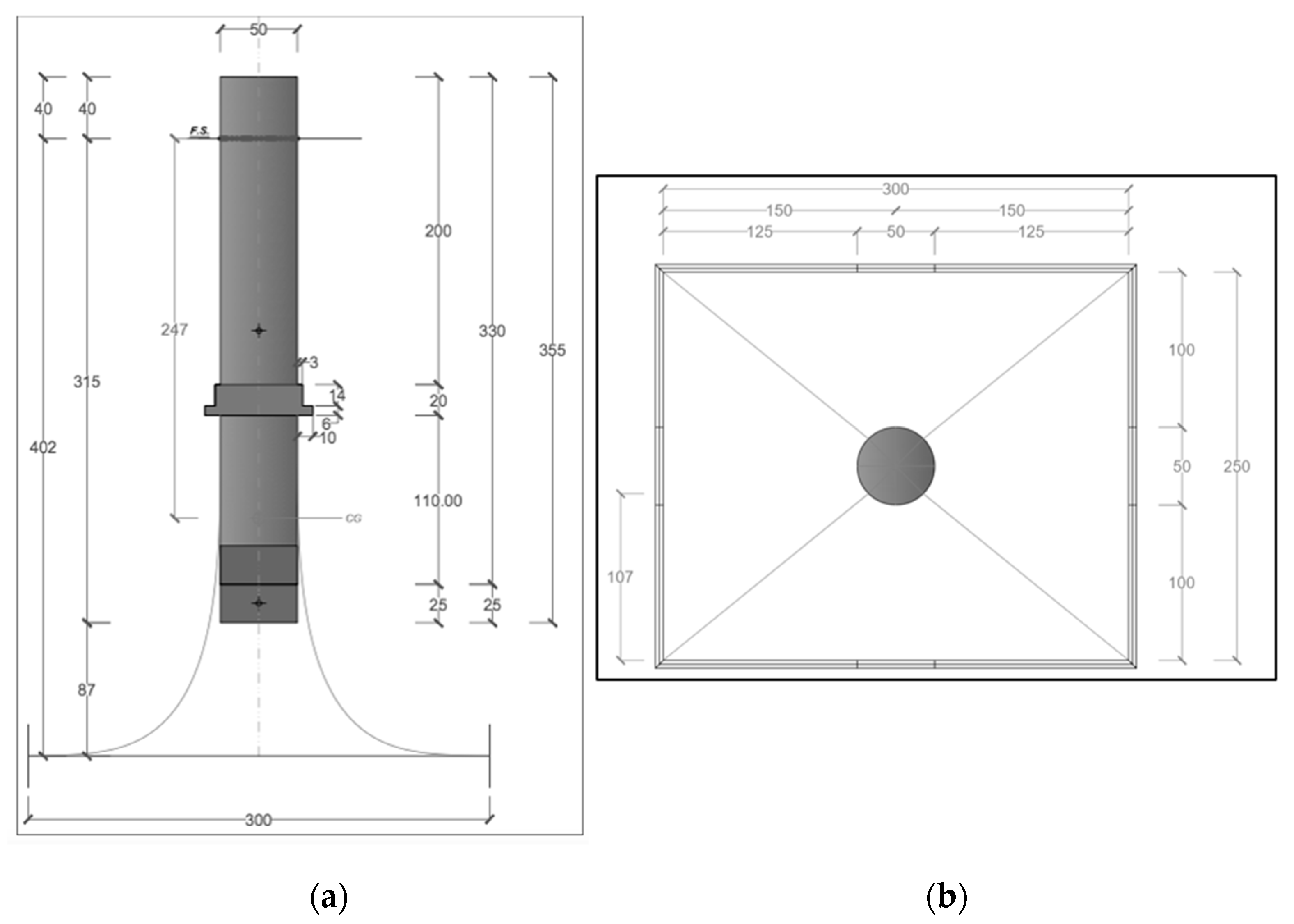
2.1. Experimental Set-Up and Generated Wave Conditions
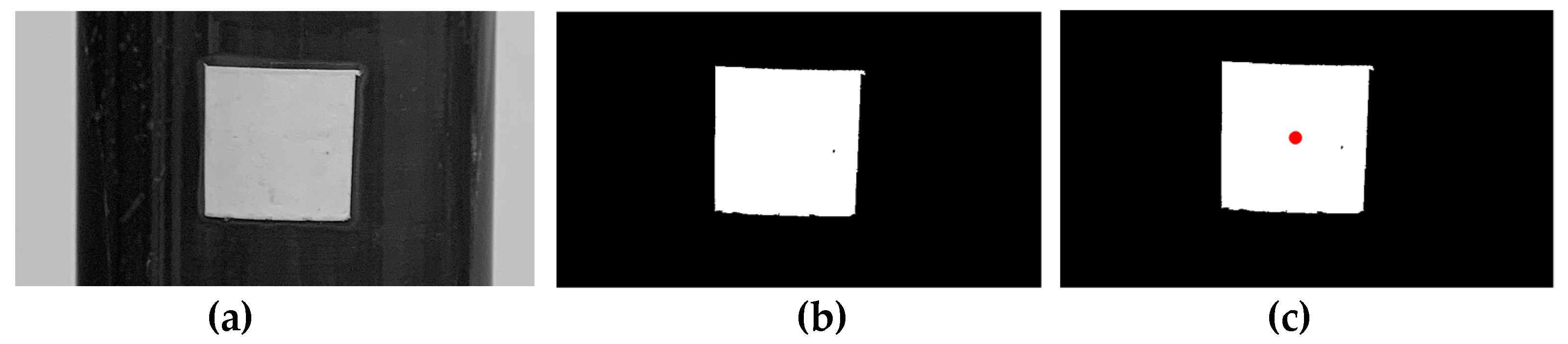
2.2. Video Analysis to Detect Body Dynamics
3. Description of the Mathematical Model
3.1. Wave-Induced Forces
3.2. Mooring System
3.3. Equations of Motion
3.4. Frequency-Domain Model
3.5. Time-Domain Model
4. Results and Discussion
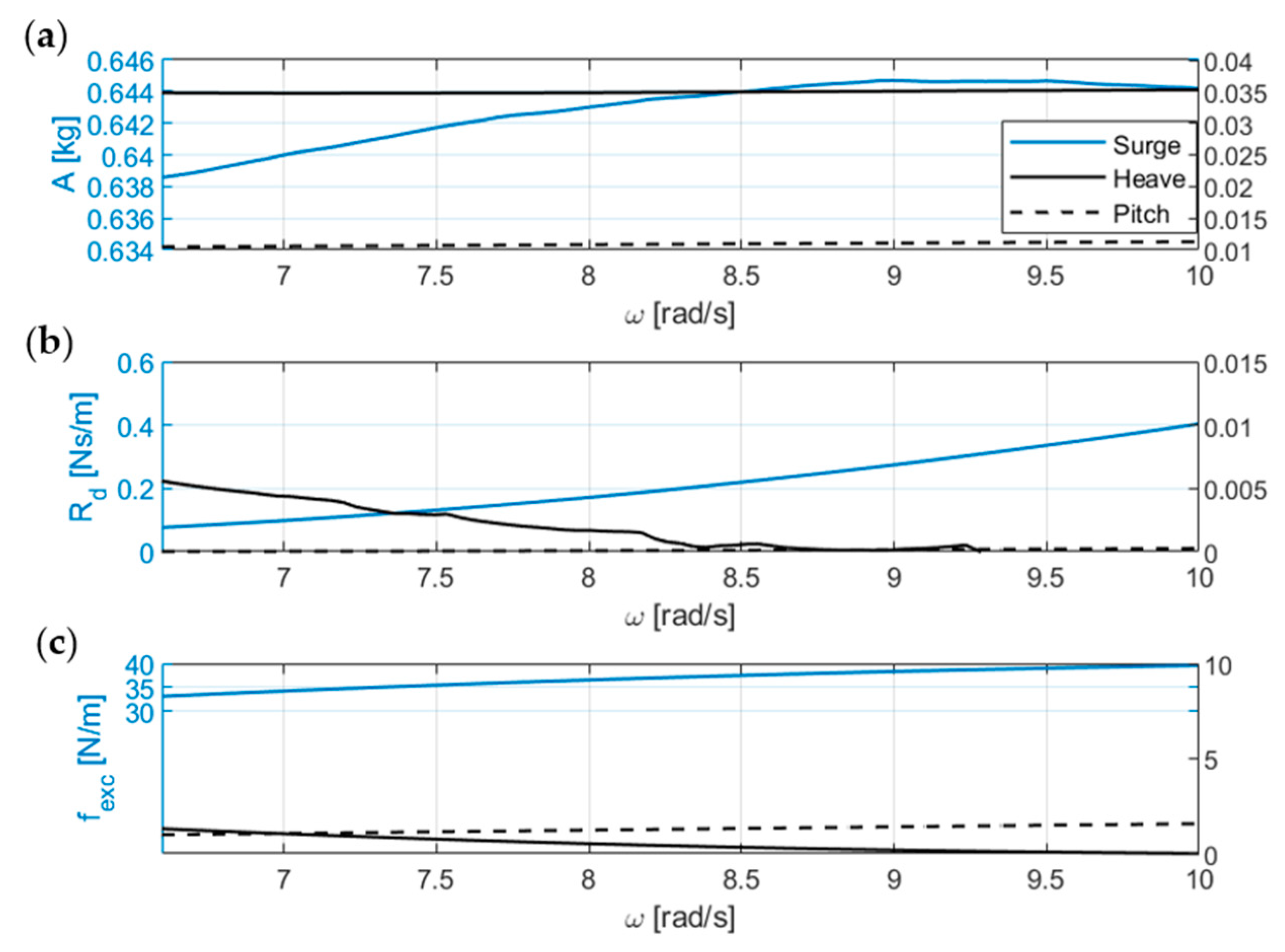
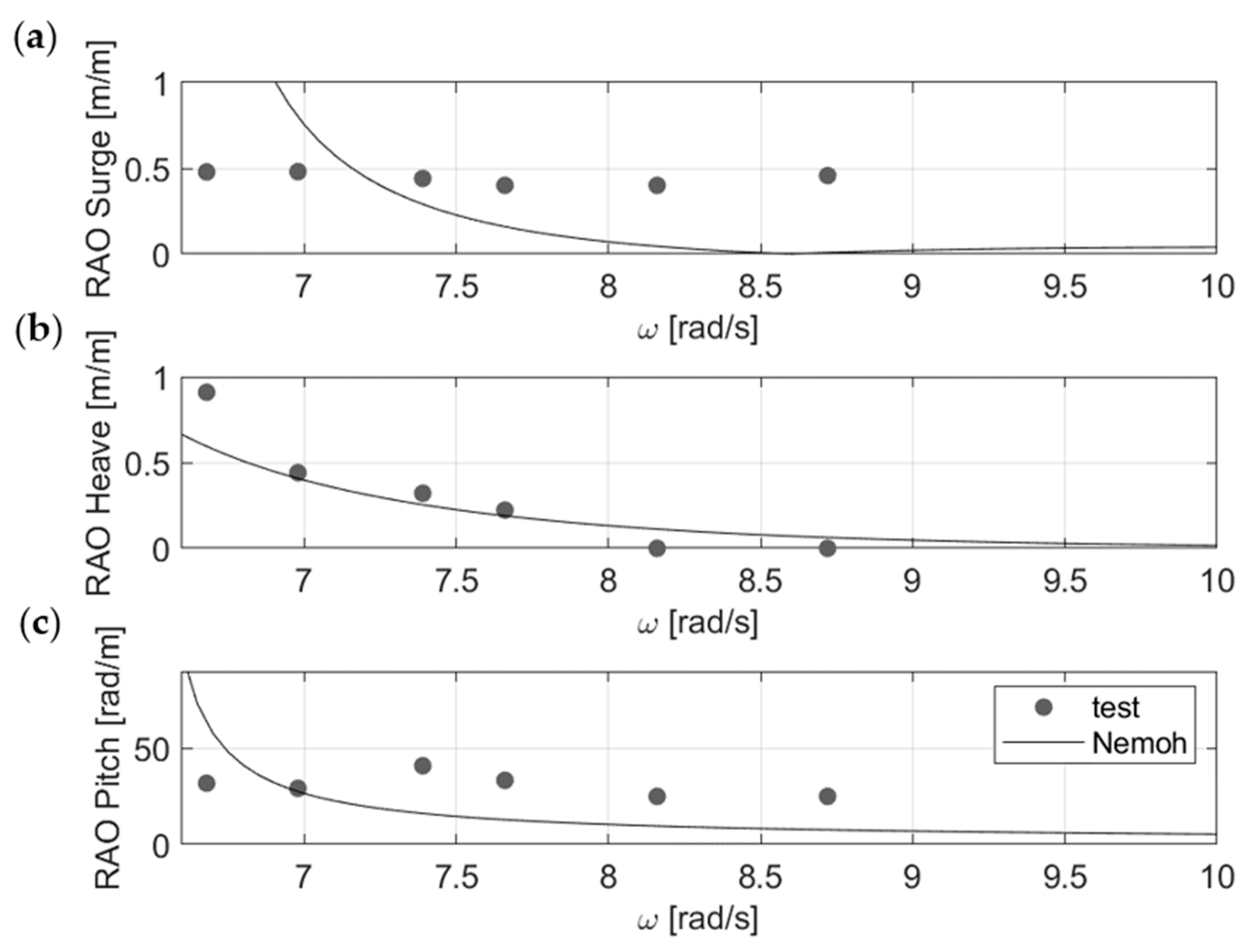
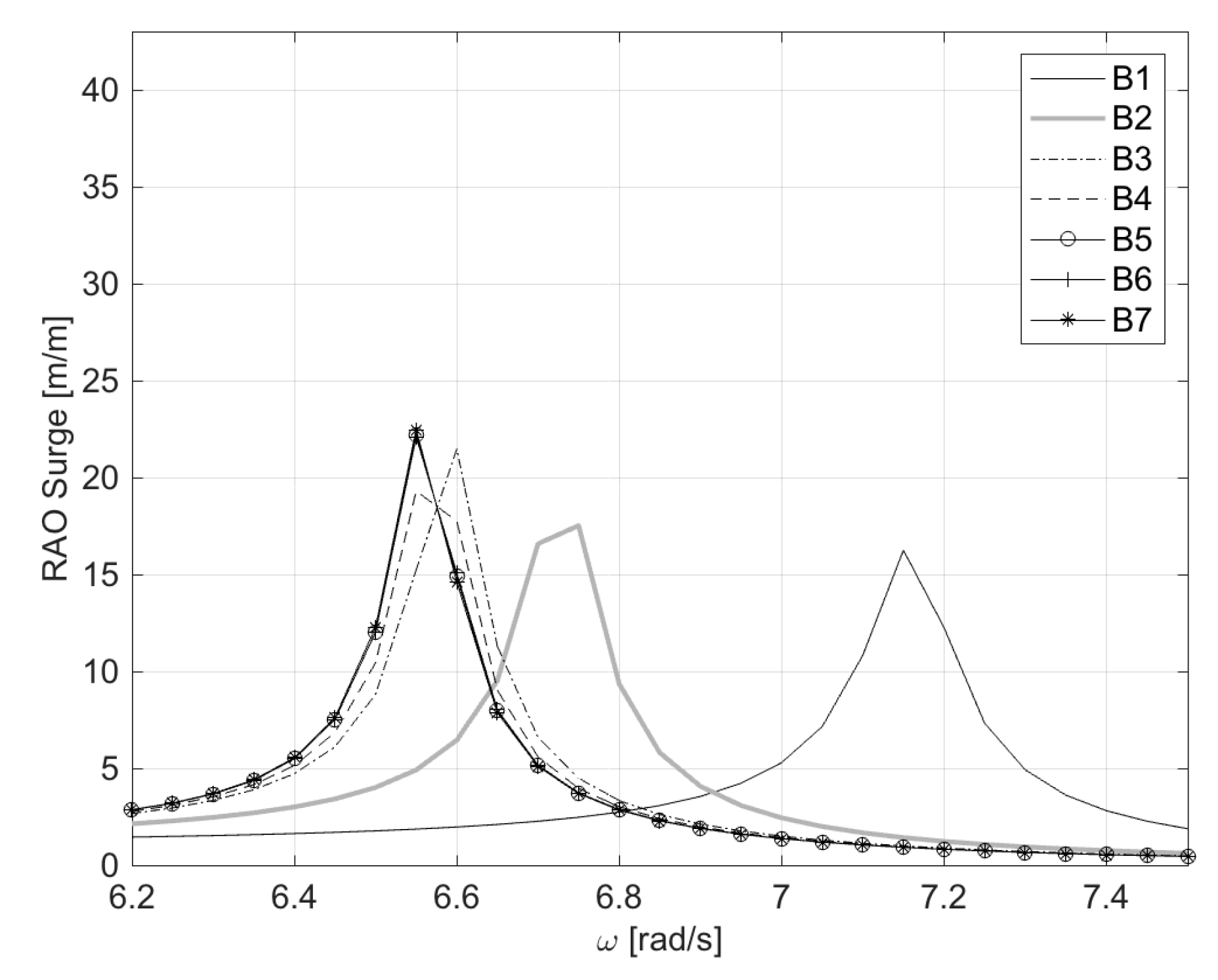
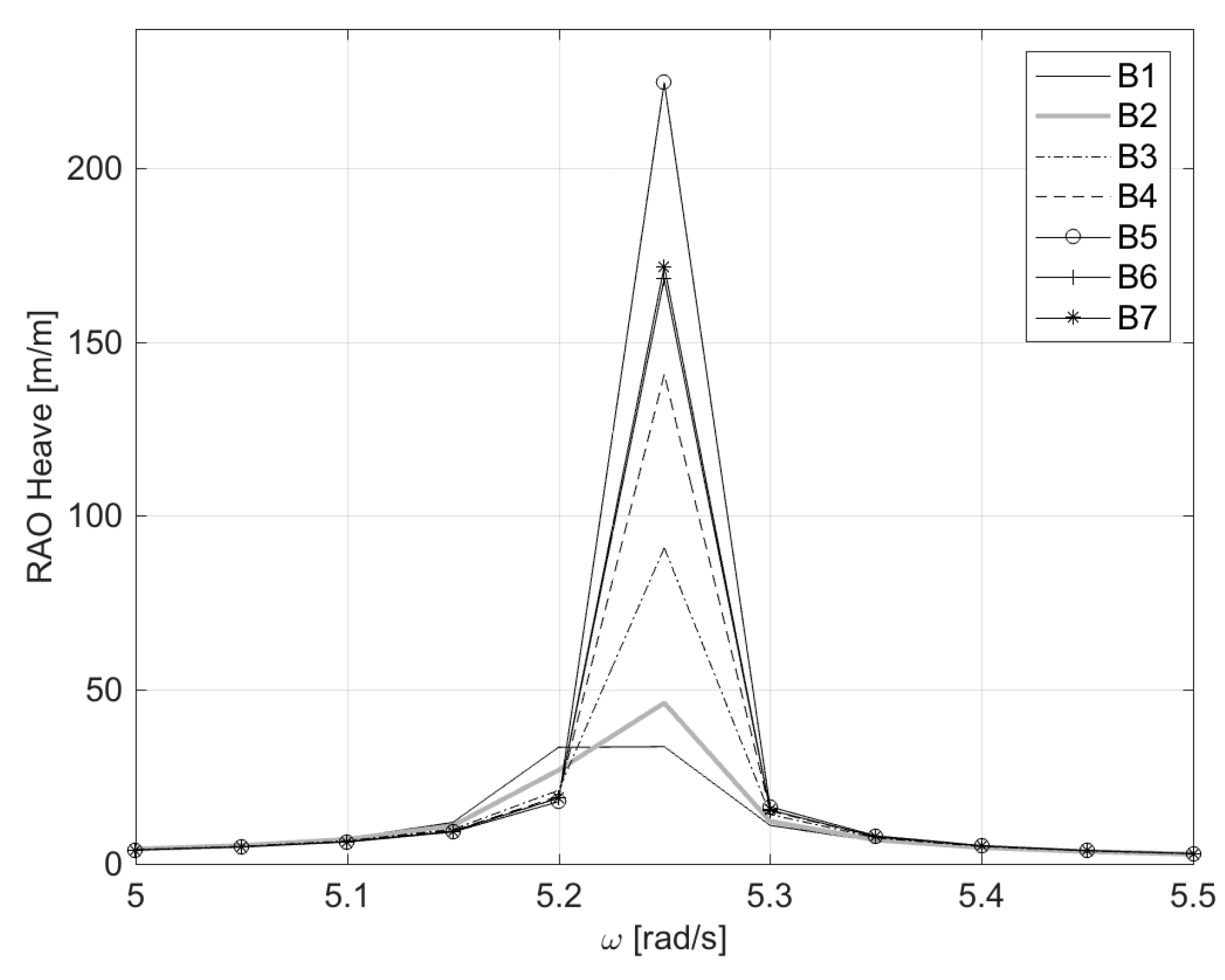
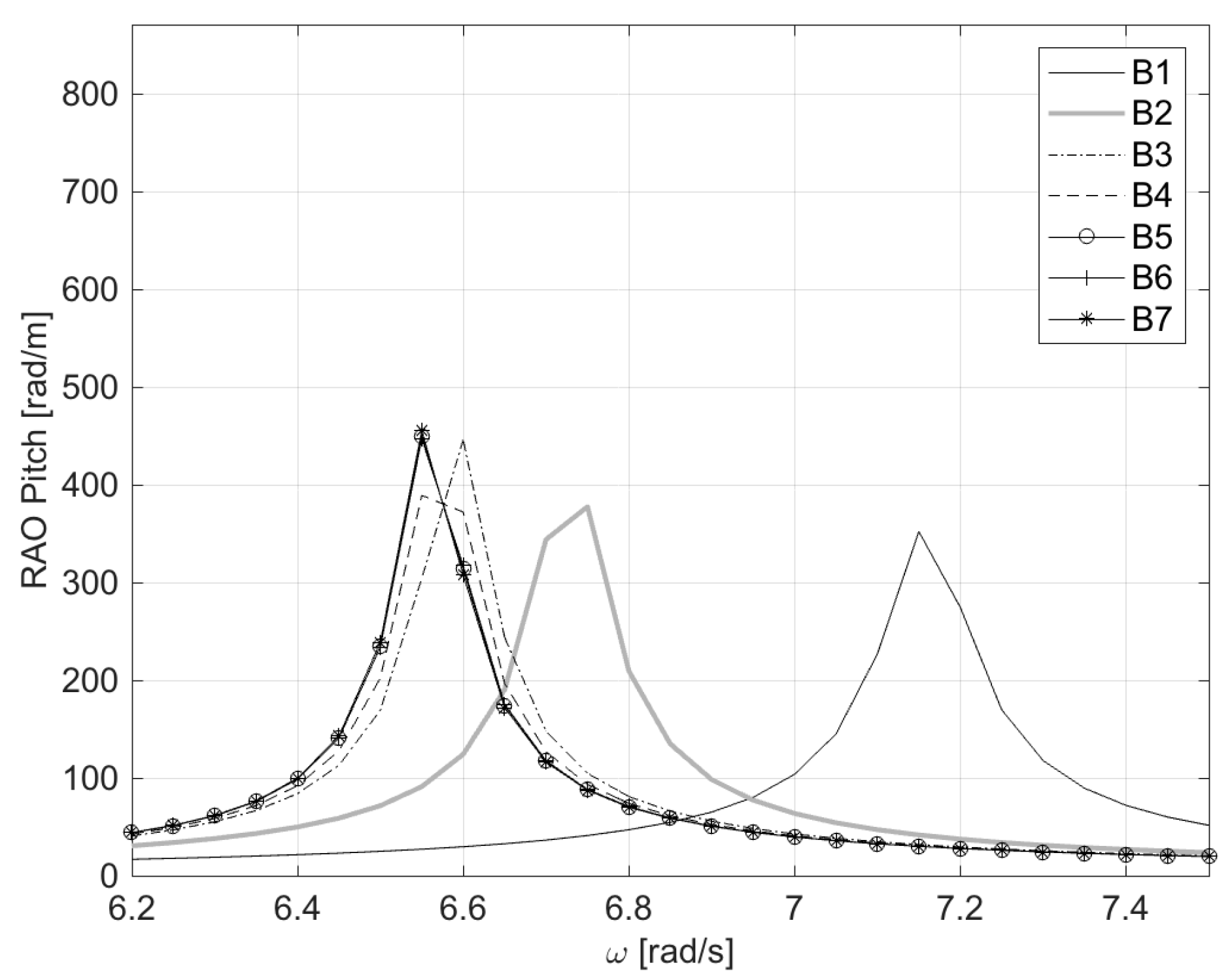
4.1. Frequency-Domain Results
4.2. Time-Domain Results
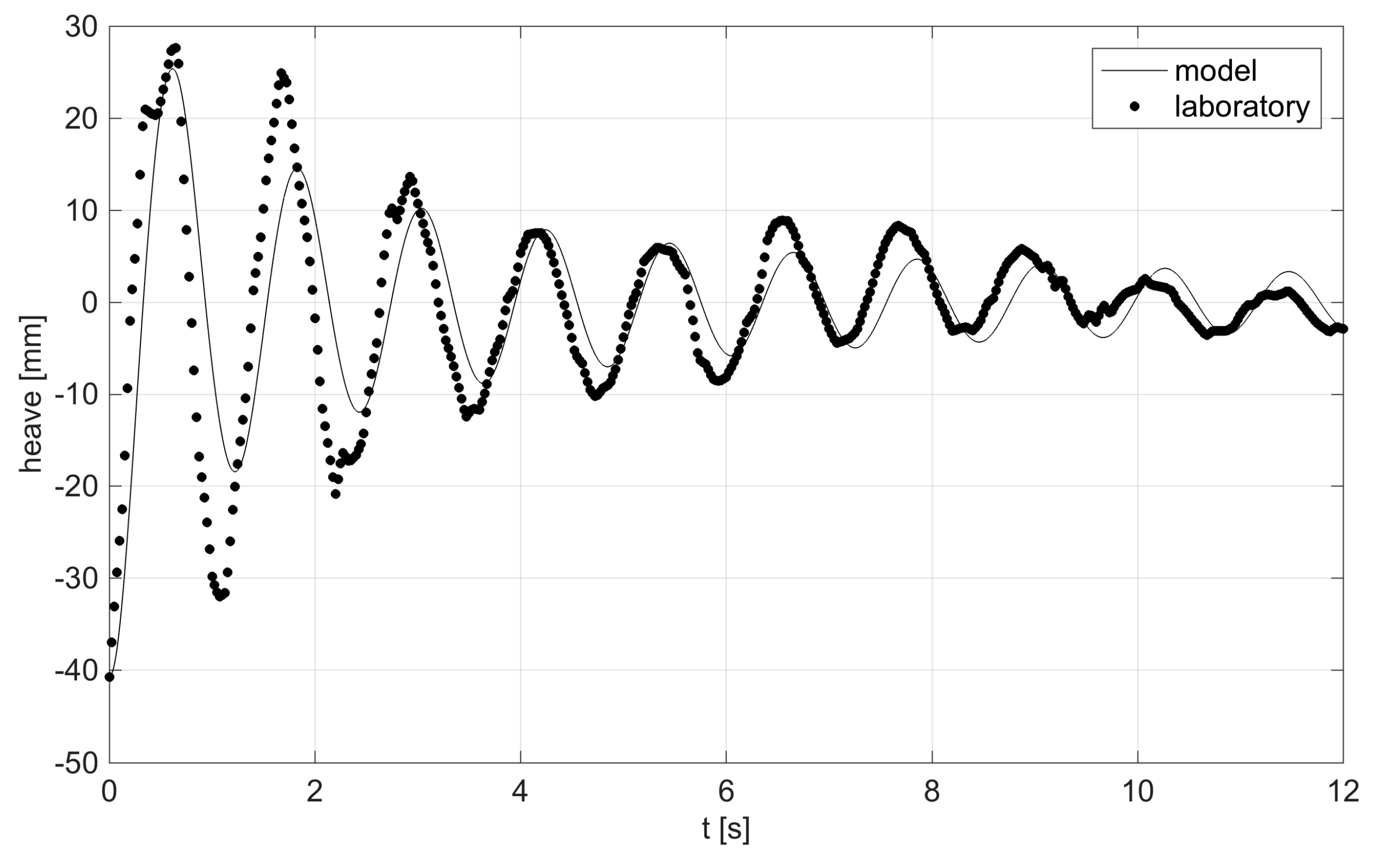
4.2.1. Free Heave Decay Test
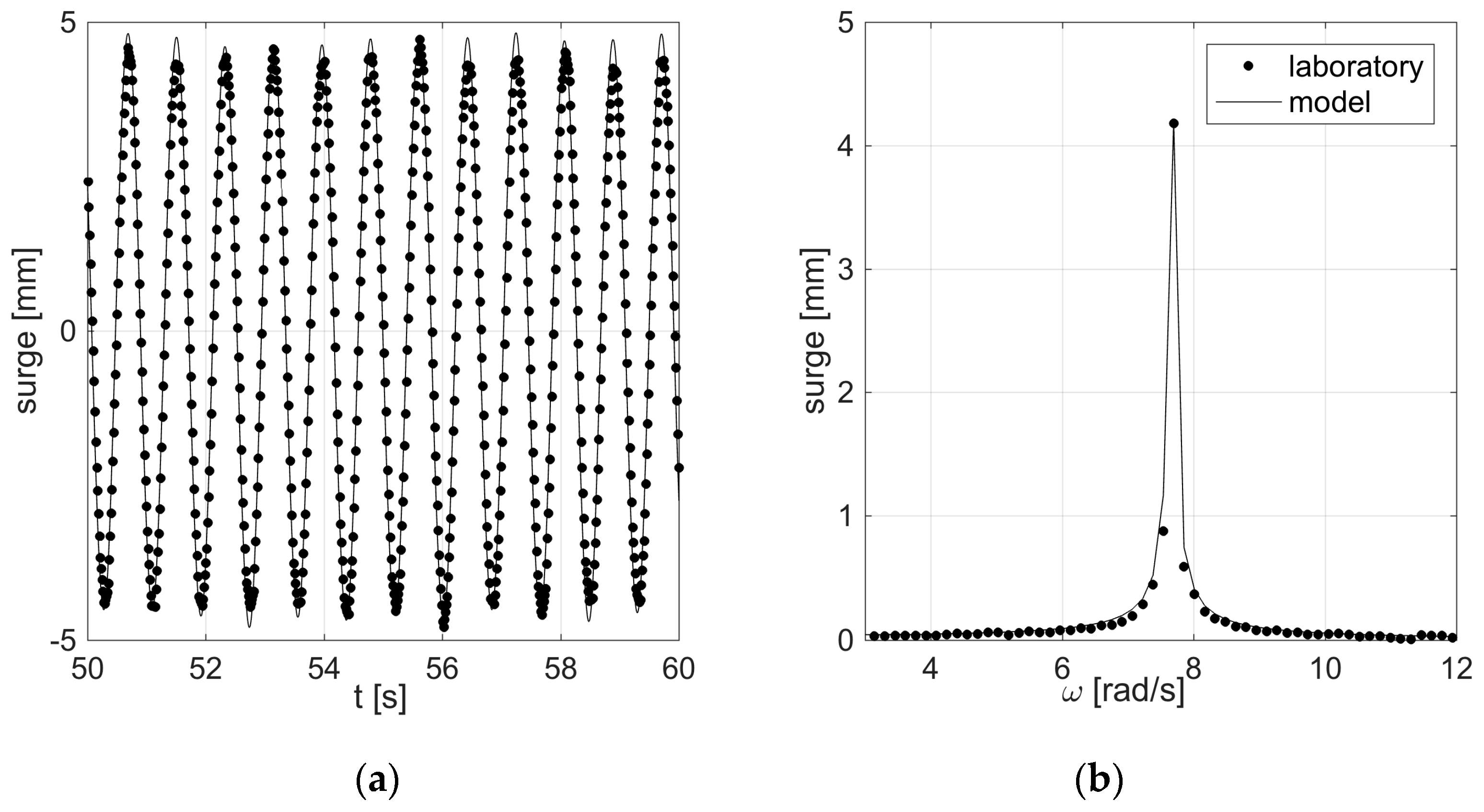
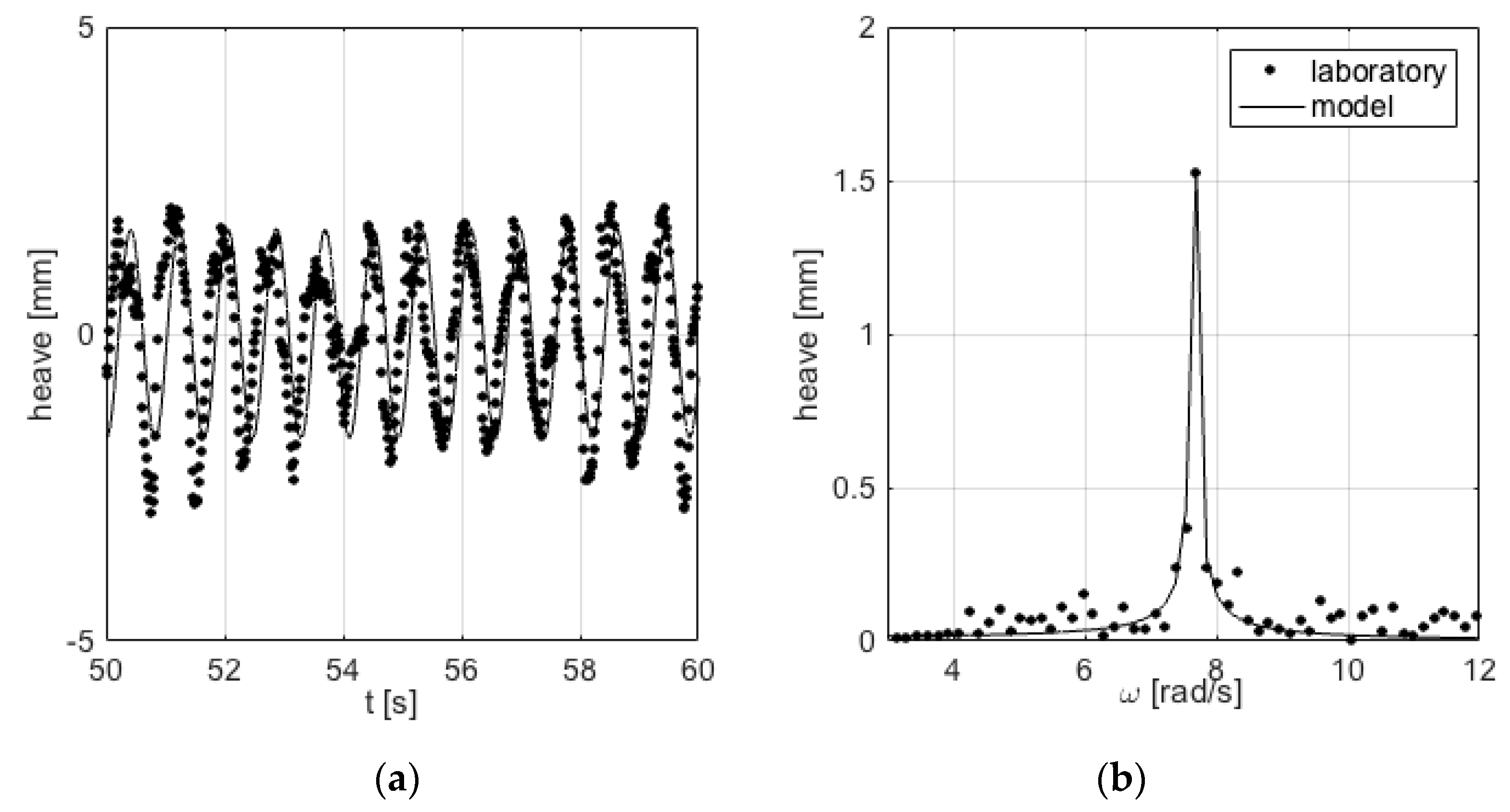
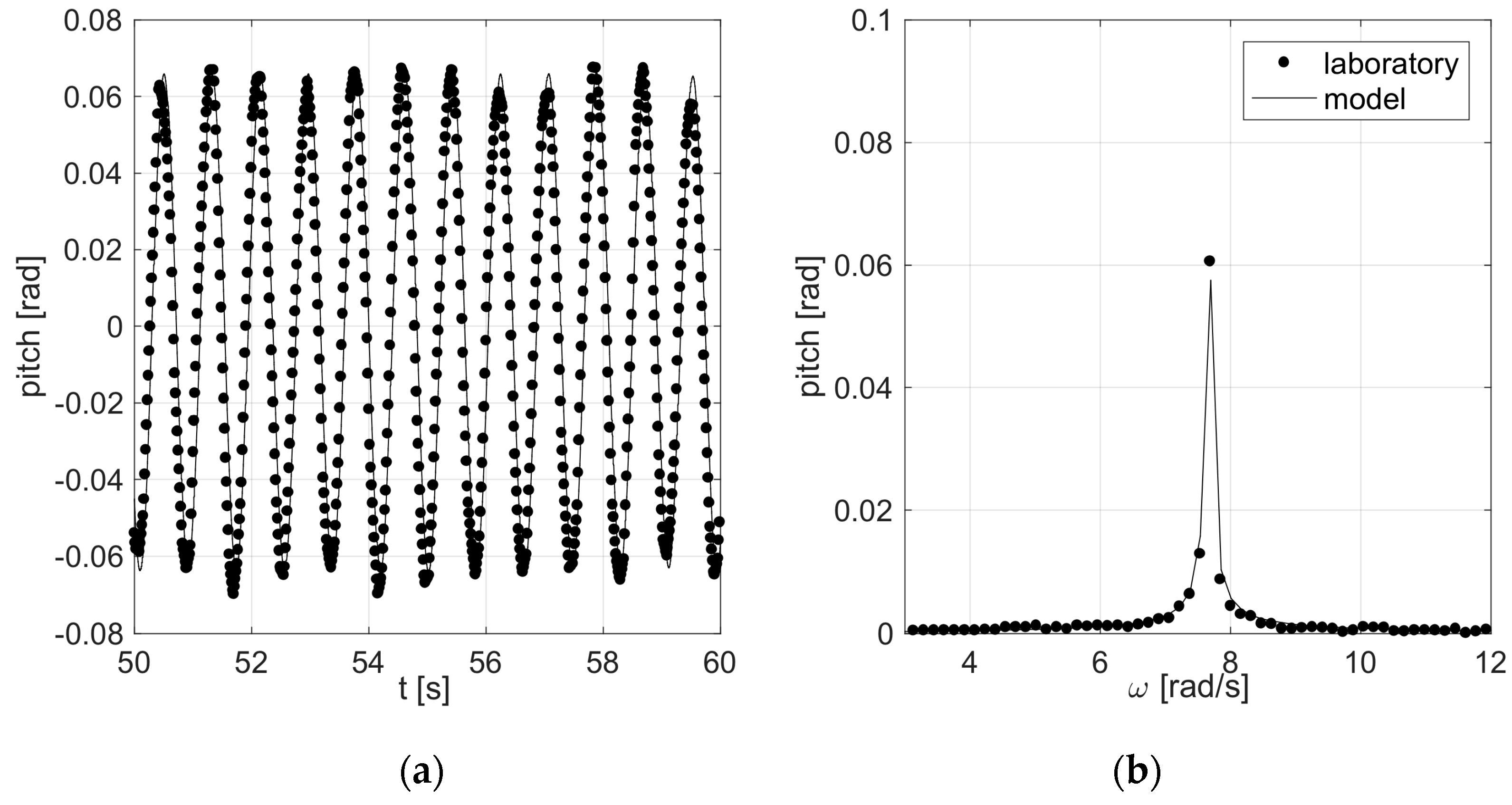
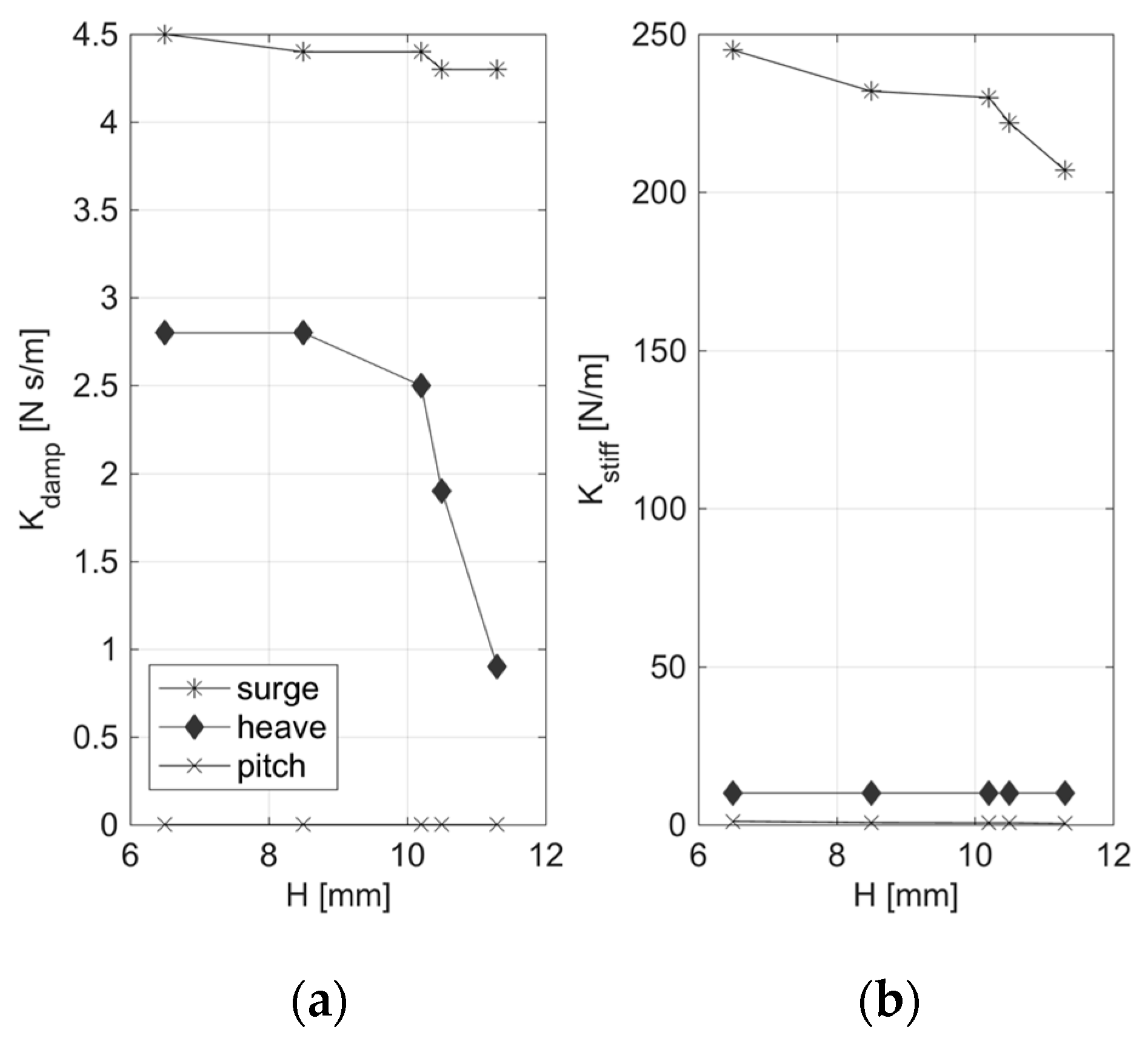
4.2.2. Model Calibration and Response to Waves
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Test ID | N. Panels | Cell Dimension (cm2) |
|---|---|---|
| B1 | 100 | 0.92 × 7.00 |
| B2 | 200 | 0.92 × 3.11 |
| B3 | 300 | 0.92 × 2.15 |
| B4 | 400 | 0.92 × 1.65 |
| B5 | 500 | 0.92 × 1.33 |
| B6 | 600 | 0.92 × 1.12 |
| B7 | 700 | 0.92 × 0.96 |
| B8 | 800 | 0.92 × 0.82 |



References
- Child, B.F.M.; Venugopal, V. Optimal configurations of wave energy device arrays. Ocean Eng. 2010, 37, 1402–1417. [Google Scholar] [CrossRef]
- De O Falcão, A.F. Wave energy utilization: A review of the technologies. Renew. Sustain. Energy Rev. 2010, 14, 899–918. [Google Scholar] [CrossRef]
- Liberti, L.; Carillo, A.; Sannino, G. Wave energy resource assessment in the Mediterranean, the Italian perspective. Renew. Energy 2013, 50, 938–949. [Google Scholar] [CrossRef]
- Bozzi, S.; Moreno Miquel, A.; Antonini, A.; Passoni, G.; Archetti, R. Modeling of a point absorber for energy conversion in Italian seas. Energies 2013, 6, 3033–3051. [Google Scholar] [CrossRef]
- Core Writing Team, R.K.; Pachauri; Meyer, L.A. IPCC, 2014: Climate Change 2014: Synthesis Report. Contribution of Working Groups I, II and III to the Fifth Assessment Report of the Intergovernmental Panel on Climate Change; IPCC: Geneva, Switzerland, 2014. [Google Scholar]
- Wolgamot, H.A.; Fitzgerald, C.J. Nonlinear hydrodynamic and real fluid effects on wave energy converters. Proc. Inst. Mech. Eng. Part A J. Power Energy 2015, 229, 772–794. [Google Scholar] [CrossRef]
- Gaeta, M.G.; Lamberti, A. The role of air modeling on the numerical investigation of coastal dynamics and wave-structure interactions. Comput. Fluids 2015, 111, 114–126. [Google Scholar] [CrossRef]
- Devolder, B.; Stratigaki, V.; Troch, P.; Rauwoens, P. CFD Simulations of Floating Point Absorber Wave Energy Converter Arrays Subjected to Regular Waves. Energies 2018, 11, 641. [Google Scholar] [CrossRef]
- Yeylaghi, S.; Moa, B.; Oshkai, P. ISPH modelling of an oscillating wave surge converter using an OpenMP-based parallel approach. J. Ocean Eng. Mar. Energy 2016, 23, 1–12. [Google Scholar] [CrossRef]
- Esmailzhade, E.; Goodarzi, A. Stability analysis of a calm floating offshore structure. Int. J. Non Linear Mech. 2001, 917–926. [Google Scholar] [CrossRef]
- Koo, B.J.; Kim, M.H.; Randall, R.E. Mathieu instability of a spar platform with mooring and risers. Ocean Eng. 2004, 31, 2175–2208. [Google Scholar] [CrossRef]
- Ricci, P.; Saulnier, J.; de Falcão, A.F.; Pontes, T. Time-Domain Models and Wave Energy Converters Performance Assessment. In Proceedings of the 27th International Conference on Offshore, Mechanics and Arctic Engineering, Estoril, Portugal, 15–20 June 2008. [Google Scholar]
- Castro-Santos, L.; Diaz-Casas, V. Floating Offshore Wind Farms; Springer: Berlin/Heidelberg, Germany, 2016. [Google Scholar]
- Babarit, A. On the park effect in arrays of oscillating wave energy converters. Renew. Energy 2013, 58, 68–78. [Google Scholar] [CrossRef]
- OrcaFlex. Available online: https://www.orcina.com/SoftwareProducts/OrcaFlex (accessed on 10 November 2019).
- ANSYS Aqwa. Available online: https://www.ansys.com/products/structures/ansys-aqwa (accessed on 10 November 2019).
- Williams, A.N.; Lee, H.S.; Huang, Z. Floating pontoon breakwaters. Ocean Eng. 2000, 27, 221–240. [Google Scholar] [CrossRef]
- Sannasiraj, S.A.; Sundar, V.; Sundaravadivelu, R. Mooring forces and motion responses of pontoon-type floating breakwaters. Ocean Eng. 1998, 25, 27–48. [Google Scholar] [CrossRef]
- Davidson, J.; Ringwood, J.V. Mathematical Modelling of Mooring Systems for Wave Energy Converters—A Review. Energies 2017, 10, 666. [Google Scholar] [CrossRef]
- Thomsen, J.B.; Ferri, F.; Kofoed, J.P. Screening of Available Tools for Dynamic Mooring Analysis of Wave Energy Converters. Energies 2017, 10, 853. [Google Scholar] [CrossRef]
- Cheng, L.; Lin, P. The Numerical Modeling of Coupled Motions of a Moored Floating Body in Waves. Water 2018, 10, 1748. [Google Scholar] [CrossRef]
- Bozzi, S.; Giassi, M.; Moreno Miquel, A.; Antonini, A.; Bizzozero, F.; Gruosso, G.; Archetti, R.; Passoni, G. Wave energy farm design in real wave climates: The Italian offshore. Energy 2017, 122, 378–389. [Google Scholar] [CrossRef]
- Wendt, F.; Nielsen, K.; Yu, Y.H.; Bingham, H.; Eskilsson, C.; Kramer, M.; Babarit, A.; Bunnik, T.; Costello, R.; Crowley, S.; et al. Ocean Energy Systems Wave Energy Modelling Task: Modelling, Verification and Validation of Wave Energy Converters. J. Mar. Sci. Eng. 2019, 7, 379. [Google Scholar] [CrossRef]
- Johanning, L.; Smith, G.; Wolfram, J. Measurements of static and dynamic mooring line damping and their importance for floating WEC devices. Ocean Eng. 2007, 34, 1918–1934. [Google Scholar] [CrossRef]
- Fitzgerald, J.; Bergdahl, L. Including moorings in the assessment of a generic offshore wave energy converter: A frequency domain approach. Mar. Struct. 2008, 21, 23–46. [Google Scholar] [CrossRef]
- Palm, J.; Eskilsson, C.; Moura Paredes, G.; Bergdahl, L. Coupled mooring analysis for floating wave energy converters using CFD: Formulation and validation. Int. J. Mar. Energy 2016, 16, 83–99. [Google Scholar] [CrossRef]
- Harnois, V.; Weller, S.D.; Johanning, L.; Thies, P.R.; Le Boulluec, M.; Le Roux, D.; Soulé, V.; Ohana, J. Numerical model validation for mooring systems: Method and application for wave energy converters. Renew. Energy 2015, 75, 869–887. [Google Scholar] [CrossRef]
- Moreno Miquel, A. Development, Analysis and Comparison of Two Concepts for Wave Energy Conversion in the Mediterranean Sea. Ph.D. Thesis, University of Bologna, Bologna, Italy, 2017. [Google Scholar]
- Moreno Miquel, A.; Archetti, R. New MoonWEC Concept and Its Device Optimization. In Proceedings of the 13rd European Wave and Tidal Energy Conference (EWTEC), Naples, Italy, 1–6 September 2019. [Google Scholar]
- Andersen, M.T.; Wendt, F.F.; Robertson, A.N.; Jonkman, J.M.; Hall, M. Verification and Validation of Multisegmented Mooring Capabilities in FAST v8. In Proceedings of the 26th International Ocean and Polar Engineering Conference, Rhodes, Greece, 26 June–2 July 2016; International Society of Offshore and Polar Engineers: Cupertino, CA, USA, 2016. [Google Scholar]
- Galvin, C.J. Wave-Height Prediction for Wave Generators in Shallow Water; Technical Memorandum No. 4; Army Corps of Engineers: Washington, DC, USA, 1964; pp. 1–20. [Google Scholar]
- Formentin, S.; Gaeta, M.G.; Palma, G.; Zanuttigh, B.; Guerrero, M. Flow Depths and Velocities across a Smooth Dike Crest. Water 2019, 11, 2197. [Google Scholar] [CrossRef]
- Zelt, J.; Skjelbreia, E. Estimating Incident and Reflected Wave Fields Using an Arbitrary Number of Wave Gauges. In Proceedings of the 23rd International Conference on Coastal Engineering, Venice, Italy, 4–9 October 1992. [Google Scholar]
- Le Mehaute, B. An introduction to Hydrodynamics and Water Waves; Springer Science & Business Media: New York, NY, USA, 1976. [Google Scholar]
- Iglesias, G.; Ibanez, O.; Castro, A.; Rabunal, J.; Dorado, J. Computer vision applied to wave flume measurements. Ocean Eng. 2009, 36, 1073–1079. [Google Scholar] [CrossRef]
- Antonini, A.; Gaeta, M.G.; Lamberti, A. Wave—Induced Devices for the Oxygenation of Deep Layer: A Physical Investigation. In Proceedings of the Coastal Engineering Conference, Santander, Spain, 1–6 July 2012; Volume 1. No. 3. [Google Scholar]
- Antonini, A.; Lamberti, A.; Archetti, R. OXYFLUX, an innovative wave-driven device for the oxygenation of deep layers in coastal areas: A physical investigation. Coast. Eng. 2015, 104, 54–68. [Google Scholar] [CrossRef]
- Thomsen, J.B.; Ferri, F.; Kofoed, J.P. Validation of a Tool for the Initial Dynamic Design of Mooring Systems for Large Floating Wave Energy Converters. J. Mar. Sci. Eng. 2017, 5, 45. [Google Scholar] [CrossRef]
- Ferri, F.; Andreoni, G.; Perisic, N.; Lavelle, J.; Kofoed, J.P. Optical Non-Contact Floating Object Tracking Using an Open-Source Library. In Proceedings of the 10th European Wave and Tidal Energy Conference Aalborg, Aalborg, Denmark, 2–5 September 2013. [Google Scholar]
- Bouguet, J.Y. Camera Calibration Toolbox for Matlab. In Camera Calibration Toolbox for MATLAB; Computational Vision at the California Institute of Technology: Pasadena, CA, USA, 2015. [Google Scholar]
- Sadraey, M. Aircraft Performance; VDM: Saarbrucken, Germany, 2011. [Google Scholar]
- Lie, H.; Sødahl, N. Simplified Dynamic Model for Estimation of Extreme Anchorline Tension; Offshore Australia: Melbourne, Australia, 1993. [Google Scholar]
- Lie, H.; Gao, Z.; Moan, T. Mooring Line Damping Estimation by A Simplified Dynamic Model. In Proceedings of the 26th International Conference on Offshore Mechanics and Arctic Engineering, San Diego, CA, USA, 10–15 June 2007. [Google Scholar]
- Babarit, A.; Delhommeau, G. Theoretical and Numerical Aspects of the Open Source BEM Solver NEMOH. In Proceedings of the 11th European Wave and Tidal Energy Conference (EWTEC2015), Nantes, France, 6–11 September 2015. [Google Scholar]
- Lin, P. Numerical Modeling of Water Waves; CRC Press: Boca Raton, FL, USA, 2019; ISBN 9780367866235. [Google Scholar]











| Parameter | Cylinder |
|---|---|
| Height (m) | 0.355 |
| Diameter D (m) | 0.050 |
| Total mass (kg) | 0.601 |
| Plastic mass (kg) | 0.188 |
| Lead mass (kg) | 0.413 |
| Position of center of gravity (m) | 0.247 |
| Parameter | Mooring System |
| No. of chains | 4 |
| Chain length (m) | 0.35 |
| Mass (g/m) | 19.5 |
| Nominal diameter (mm) | 0.95 |
| Material | Steel |
| Test ID | H (m) | w (rad/s) | (m) | kR | |
|---|---|---|---|---|---|
| R03 | 0.007 | 8.72 | 0.80 | 0.15 | 0.500 |
| R04 | 0.008 | 8.16 | 0.90 | 0.15 | 0.444 |
| R05 | 0.009 | 7.66 | 1.00 | 0.16 | 0.400 |
| R06 | 0.010 | 7.39 | 1.10 | 0.18 | 0.364 |
| R07 | 0.010 | 6.98 | 1.20 | 0.20 | 0.333 |
| R08 | 0.011 | 6.68 | 1.30 | 0.22 | 0.308 |
| Test ID | KC | D/λ |
|---|---|---|
| R03 | 3.02 | 0.063 |
| R04 | 3.39 | 0.056 |
| R05 | 3.77 | 0.050 |
| R06 | 4.14 | 0.046 |
| R07 | 4.52 | 0.042 |
| R08 | 4.90 | 0.039 |
| Type of Force | Mathematical Expression | |
|---|---|---|
| Radiation damping force | (1) | |
| Drag force | (2) | |
| Hydrostatic restoring force | (3) | |
| Excitation force | (4) | |
| Parameter | Laboratory | Model/Error (%) |
|---|---|---|
| wn (rad/s) | 5.29 | 5.25/−0.75 |
| z1 (mm) | 24.0 | 15/−37.0 |
| z2 (mm) | 12.0 | 10/−15.0 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gaeta, M.G.; Segurini, G.; Moreno, A.M.; Archetti, R. Implementation and Validation of a Potential Model for a Moored Floating Cylinder under Waves. J. Mar. Sci. Eng. 2020, 8, 131. https://doi.org/10.3390/jmse8020131
Gaeta MG, Segurini G, Moreno AM, Archetti R. Implementation and Validation of a Potential Model for a Moored Floating Cylinder under Waves. Journal of Marine Science and Engineering. 2020; 8(2):131. https://doi.org/10.3390/jmse8020131
Chicago/Turabian StyleGaeta, Maria Gabriella, Giacomo Segurini, Adrià M. Moreno, and Renata Archetti. 2020. "Implementation and Validation of a Potential Model for a Moored Floating Cylinder under Waves" Journal of Marine Science and Engineering 8, no. 2: 131. https://doi.org/10.3390/jmse8020131
APA StyleGaeta, M. G., Segurini, G., Moreno, A. M., & Archetti, R. (2020). Implementation and Validation of a Potential Model for a Moored Floating Cylinder under Waves. Journal of Marine Science and Engineering, 8(2), 131. https://doi.org/10.3390/jmse8020131