Numerical Simulation and Uncertainty Analysis of an Axial-Flow Waterjet Pump

 ,
,
Abstract
:1. Introduction
2. CFD Uncertainty Analysis Procedure
2.1. Verification
2.2. Validation
- (1)
- |E| < UV < Ureqd
- (2)
- |E| < Ureqd < UV
- (3)
- Ureqd < |E| < UV
- (4)
- UV < |E| < Ureqd
- (5)
- UV < Ureqd < |E|
- (6)
- Ureqd < UV < |E|
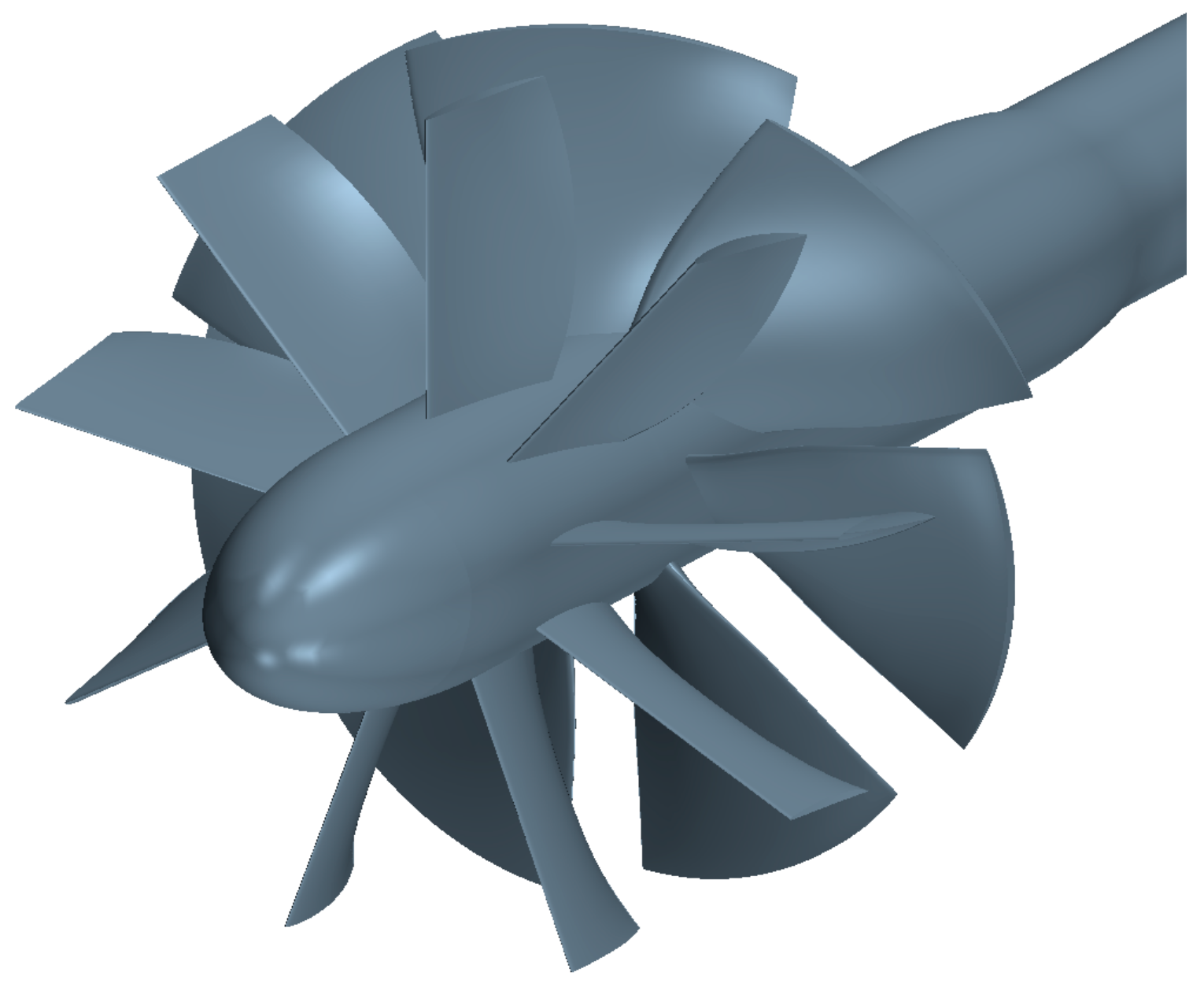
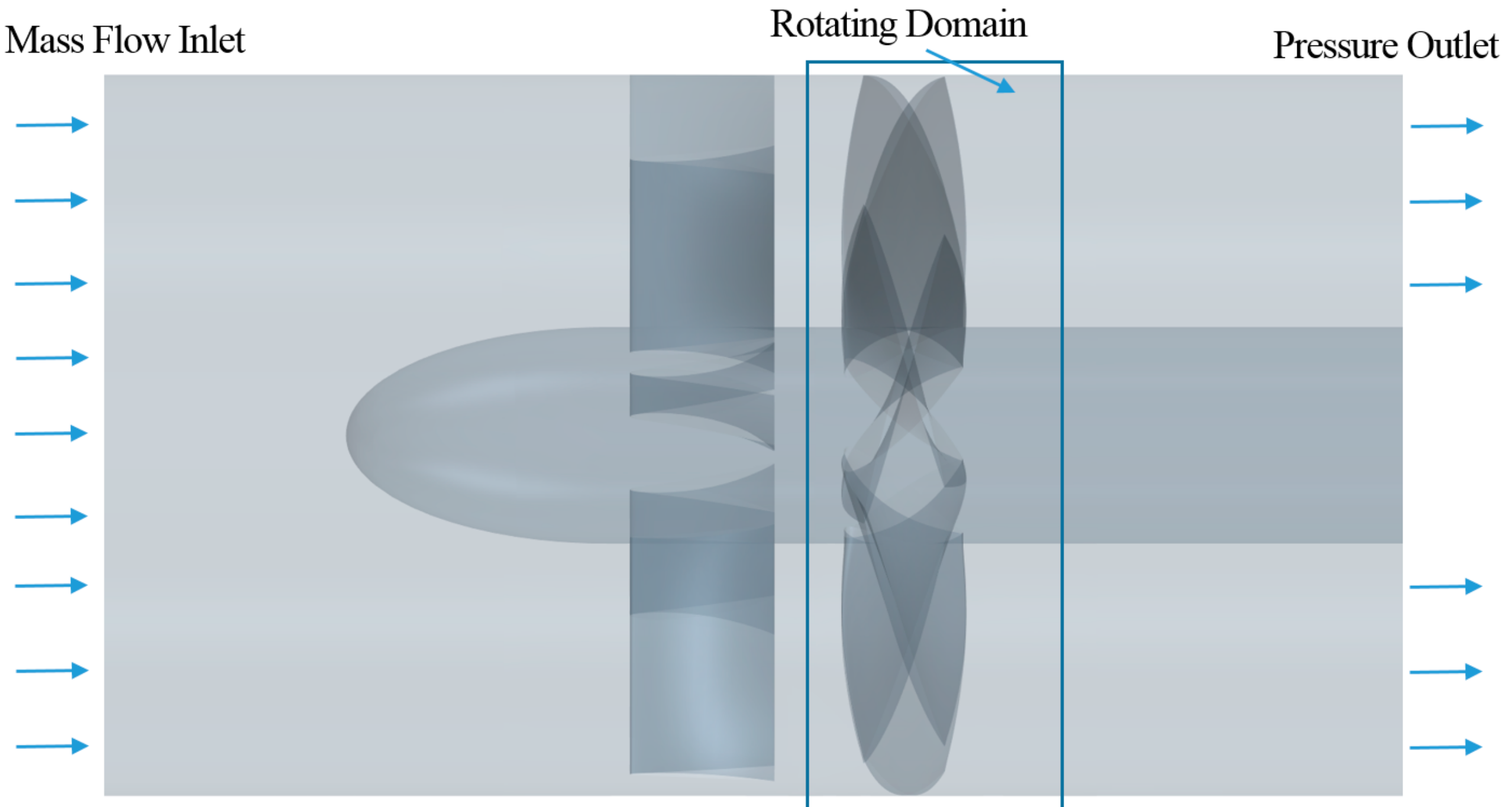
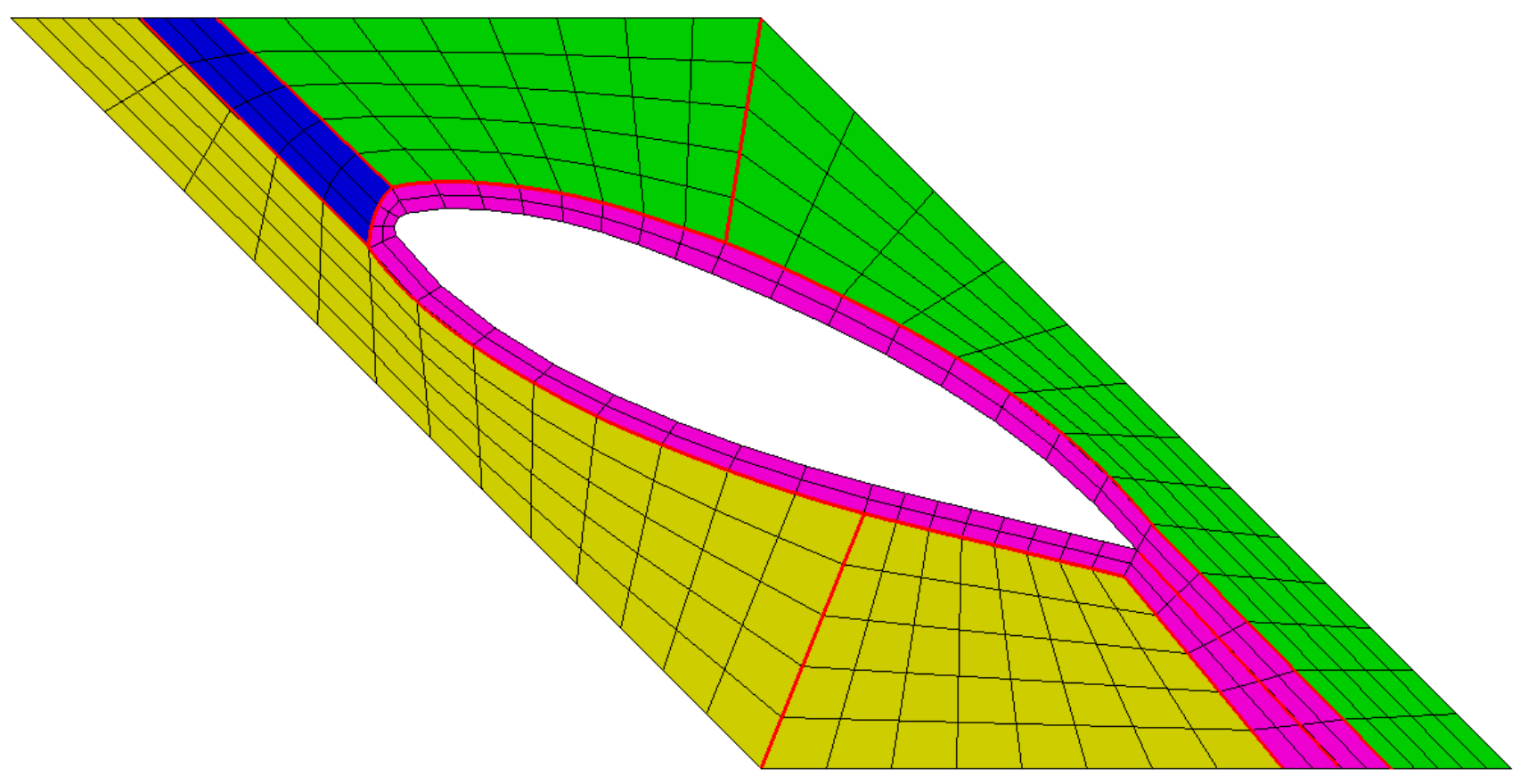
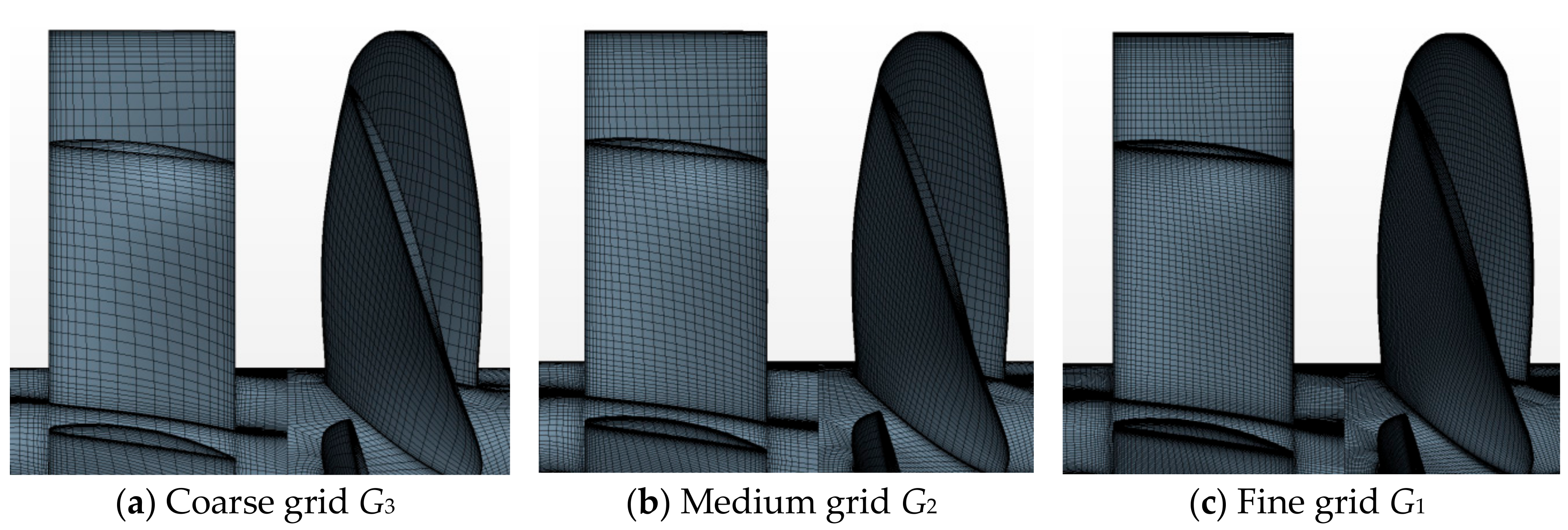
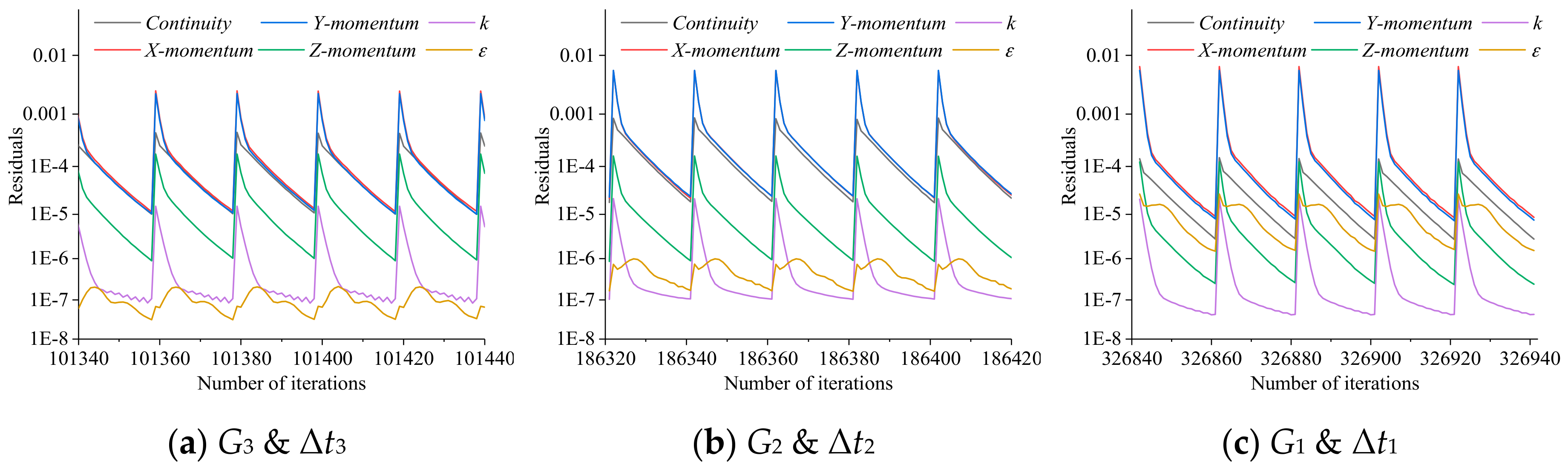
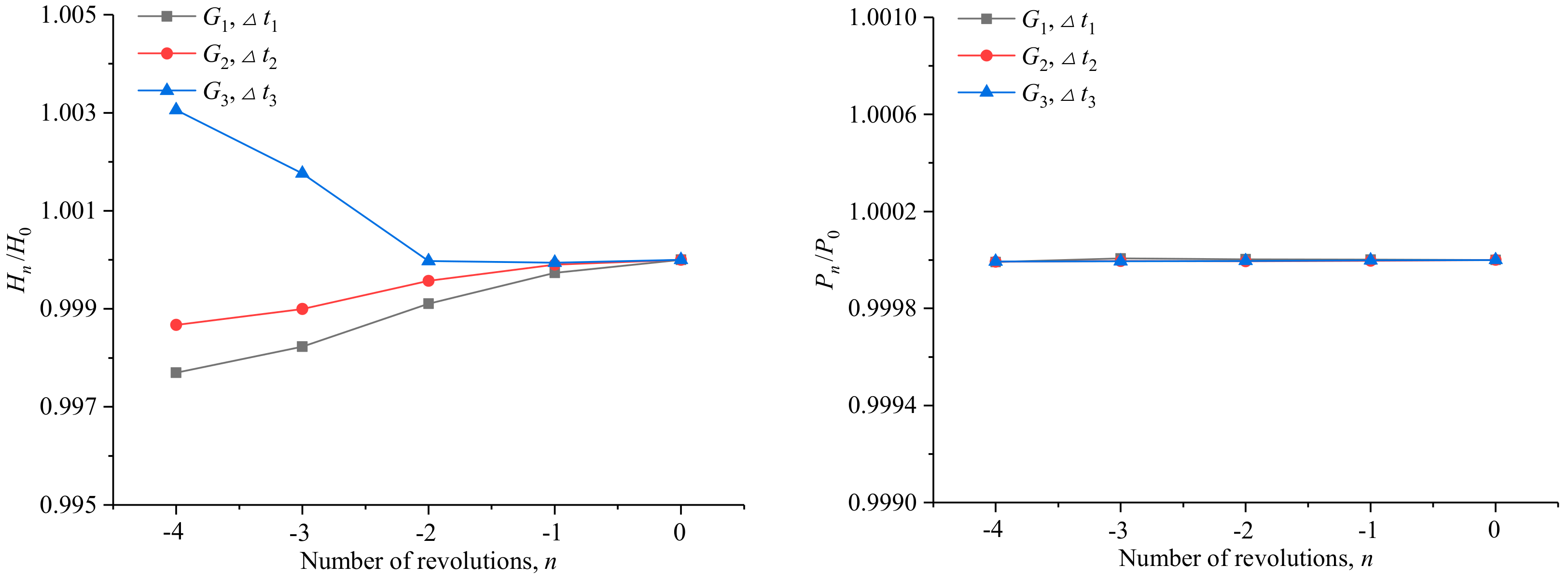
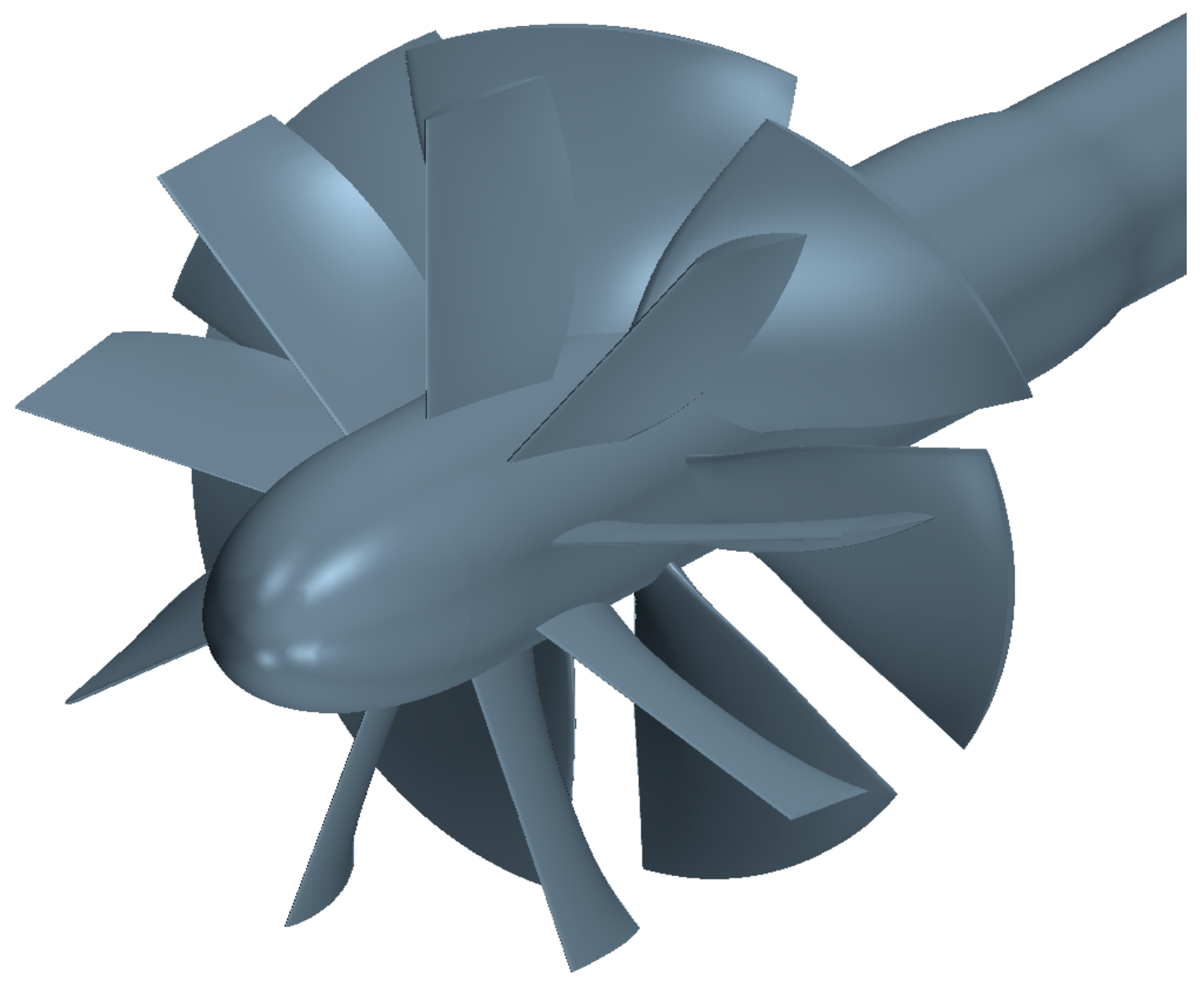
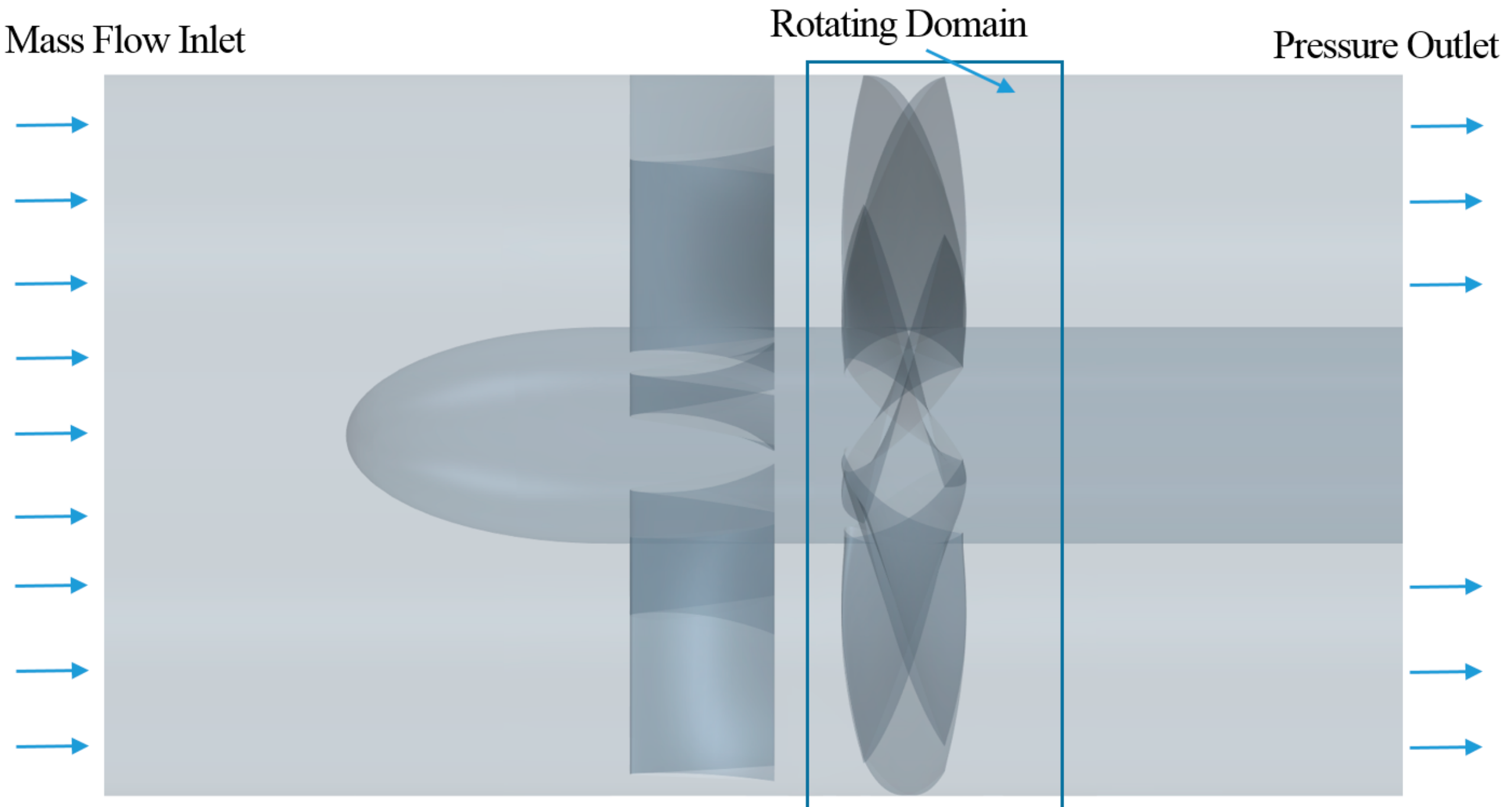
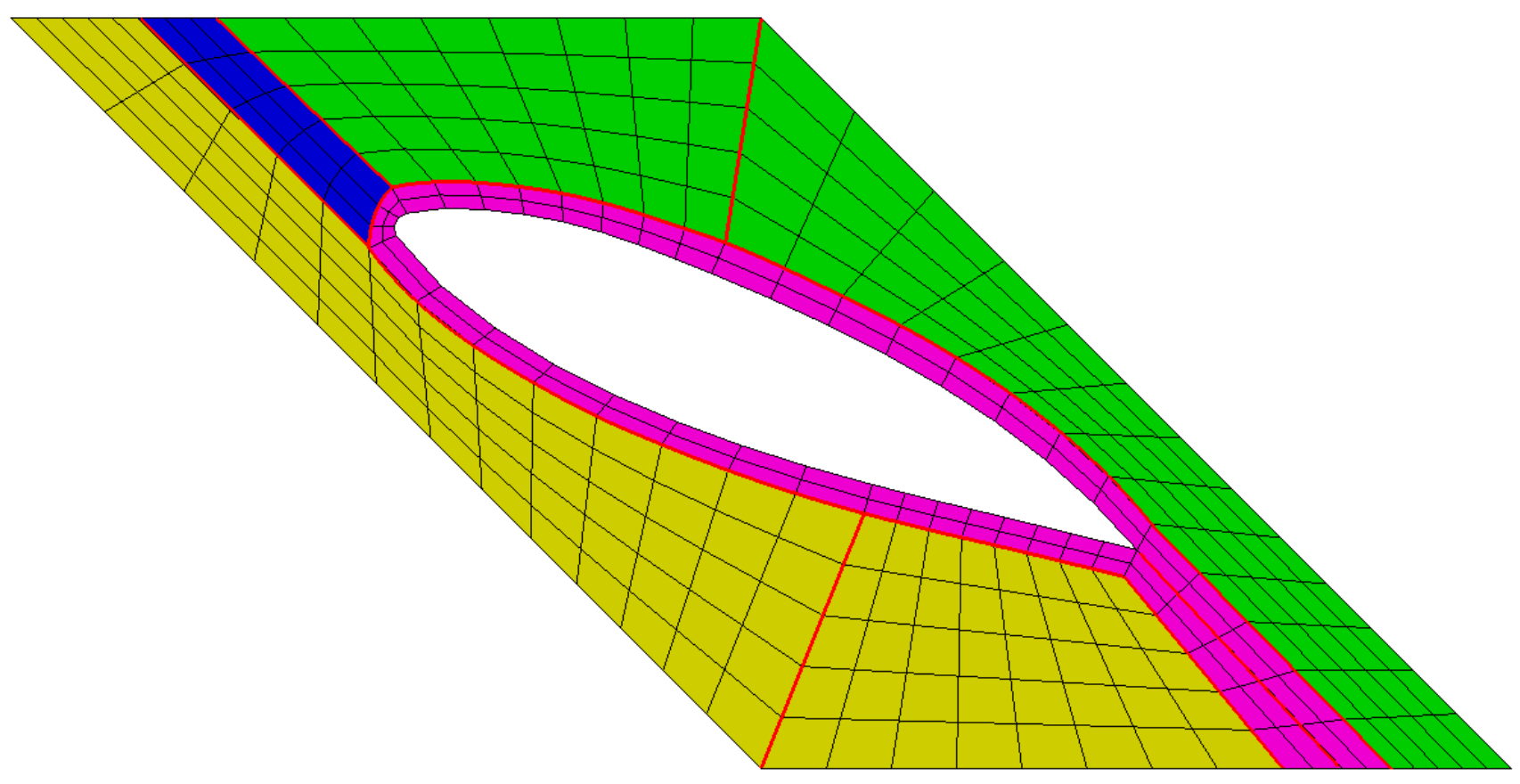
3. Unsteady RANS Simulation of an Axial-Flow Pump
4. Numerical Uncertainty Analysis for the Axial-Flow Pump
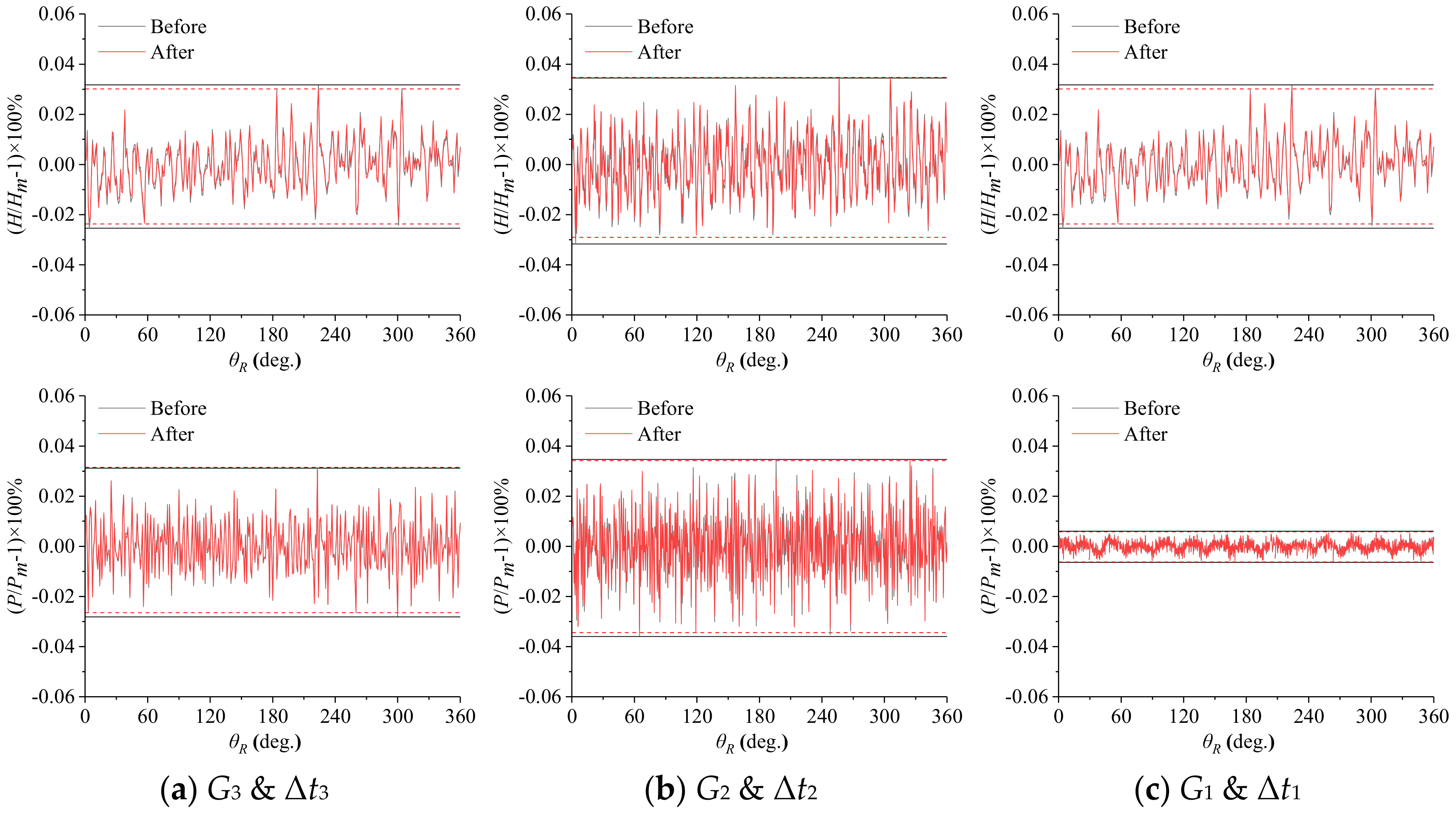
4.1. Verification
- (1)
- The convergence ratio is 0 < R < 1, which indicates the simulation results converge monotonically when the discretization in time and space is refined simultaneously and consistently. This result justifies the use of the generalized Richardson extrapolation (RE) for evaluating the observed order of accuracy p and the estimated error .
- (2)
- The estimated limiting order of accuracy pest is set to 2, since the governing equations are discretized with second-order schemes in space, and although a first-order scheme is used for the discretization in time.
- (3)
- The correction factor C is sufficiently far from 1 in most cases. Therefore, only the uncertainty UGT is evaluated to give a boundary of the simulation error.
- (4)
- (5)
- The numerical uncertainties are less than 4.3%; and the uncertainties in simulated head are higher than those in simulated power, especially at the low are high flow rates.
4.2. Validation
- (1)
- The validation is successfully achieved at the UV level of 1–4%, except for the power P at Q = 0.35 m3/s and Q = 0.471 m3/s.
- (2)
- For the power P at Q = 0.471 m3/s, the validation is successful at the |E| level of 1%, although the comparison error is larger than the validation uncertainty.
- (3)
- For the power P at Q = 0.35 m3/s, the comparison error is much larger than the validation uncertainty, which indicates that the modeling error is large, and the validation is not achieved.
- (4)
- In most cases investigated here, the principal source of error is unidentifiable since the comparison errors are quite close to the validation uncertainties.
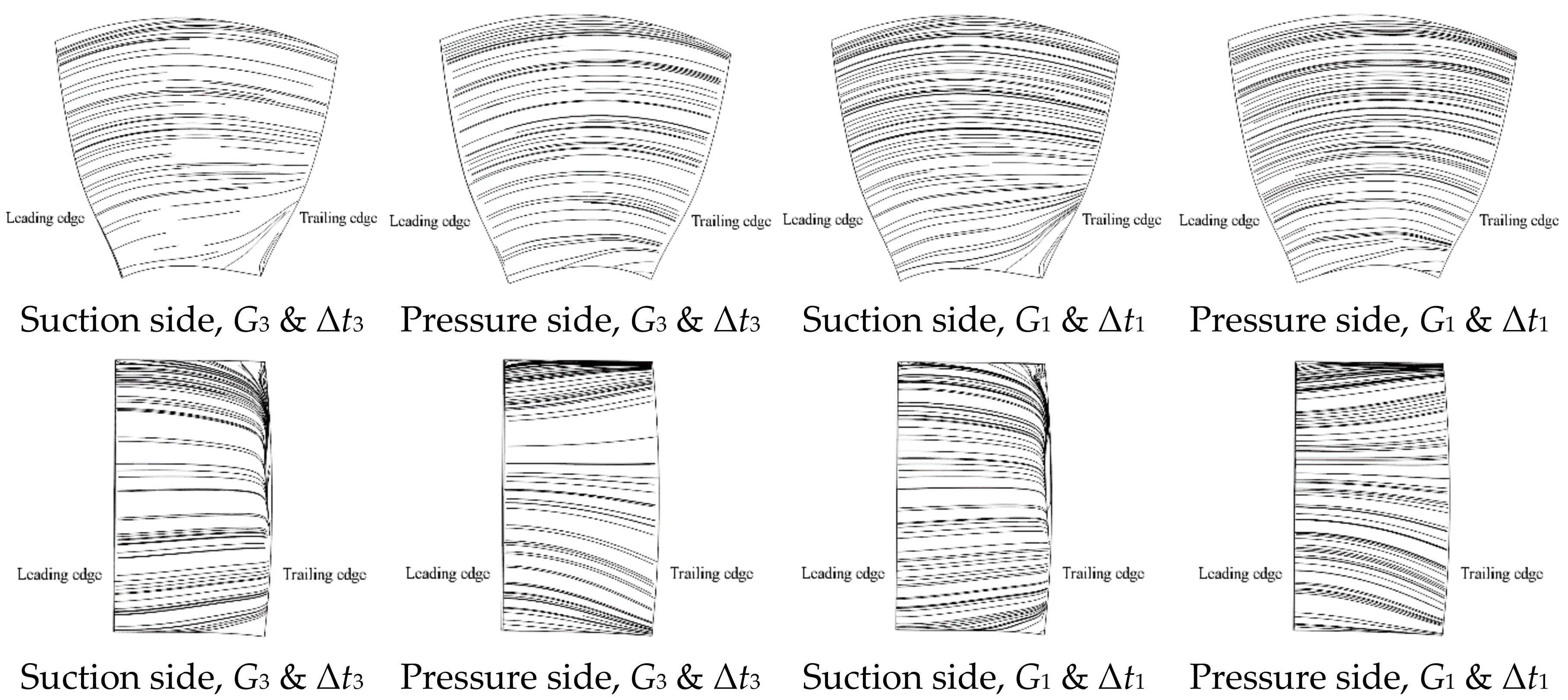
5. Simulated Flow Features
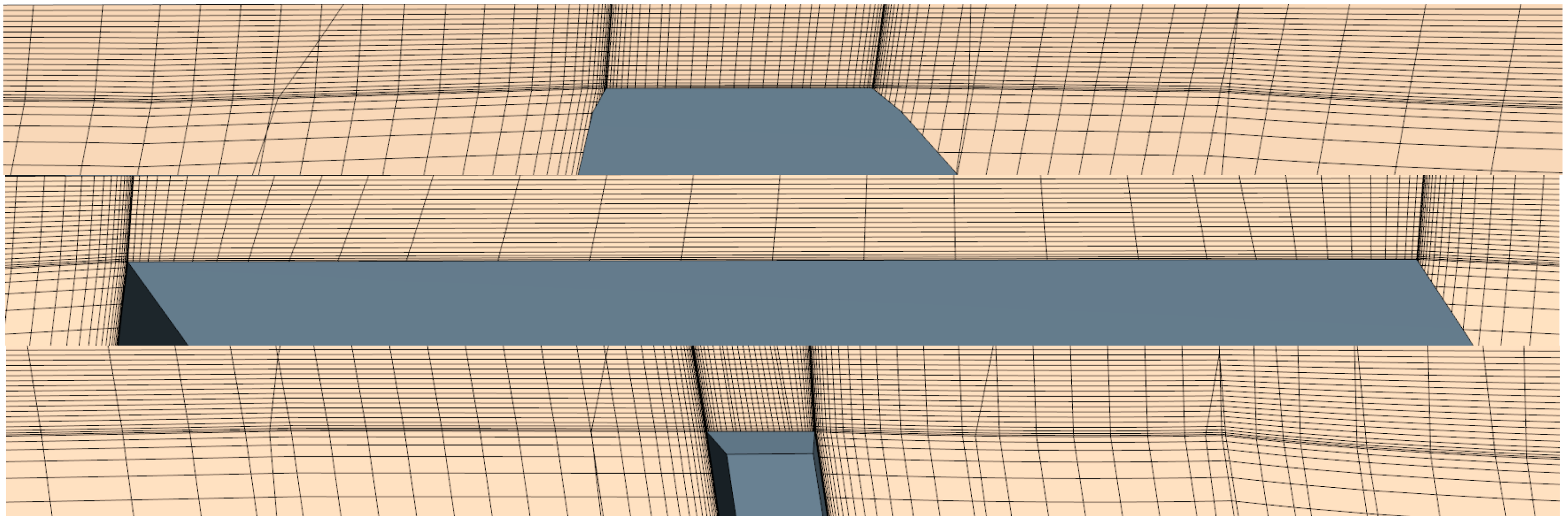
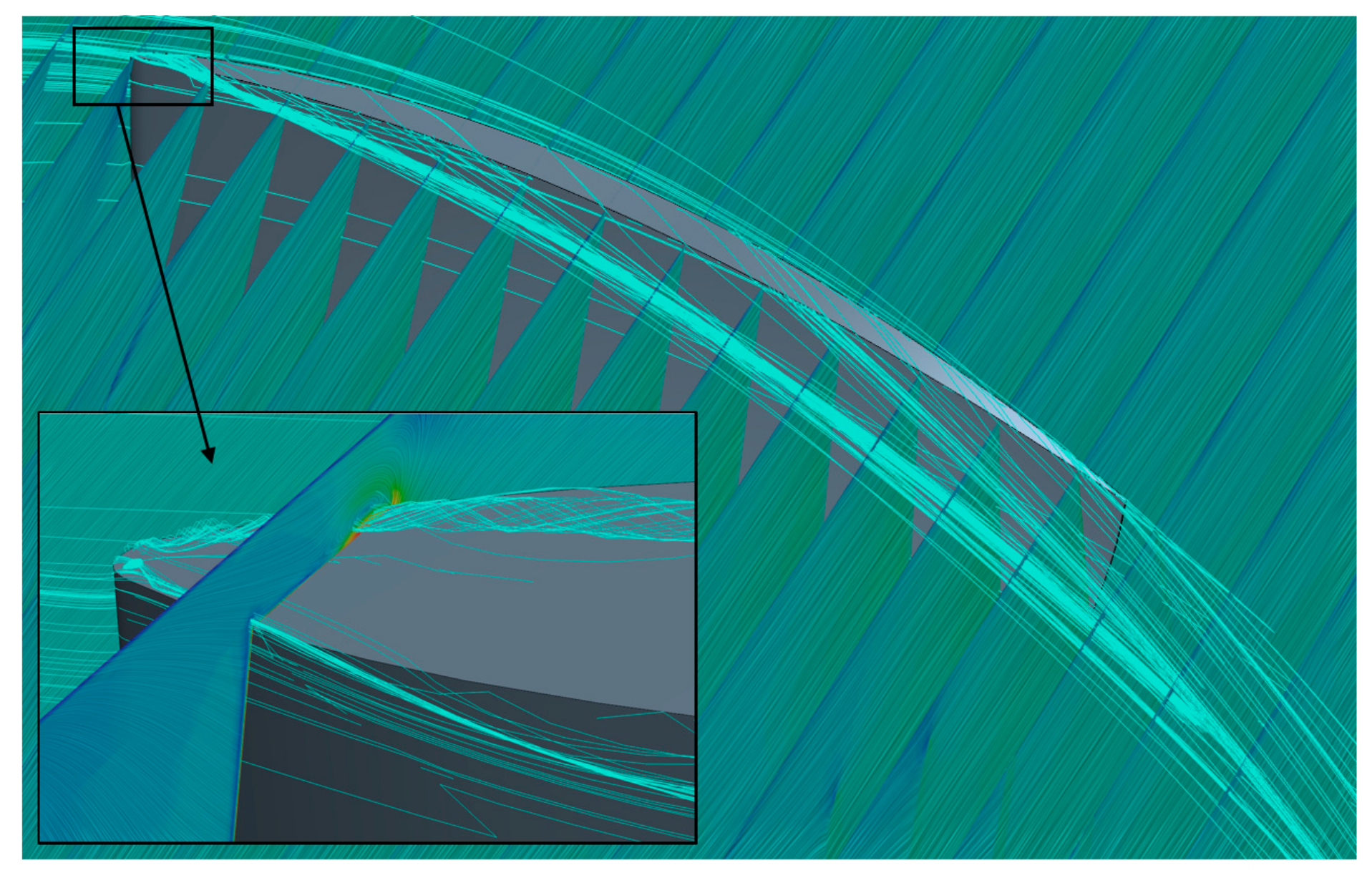
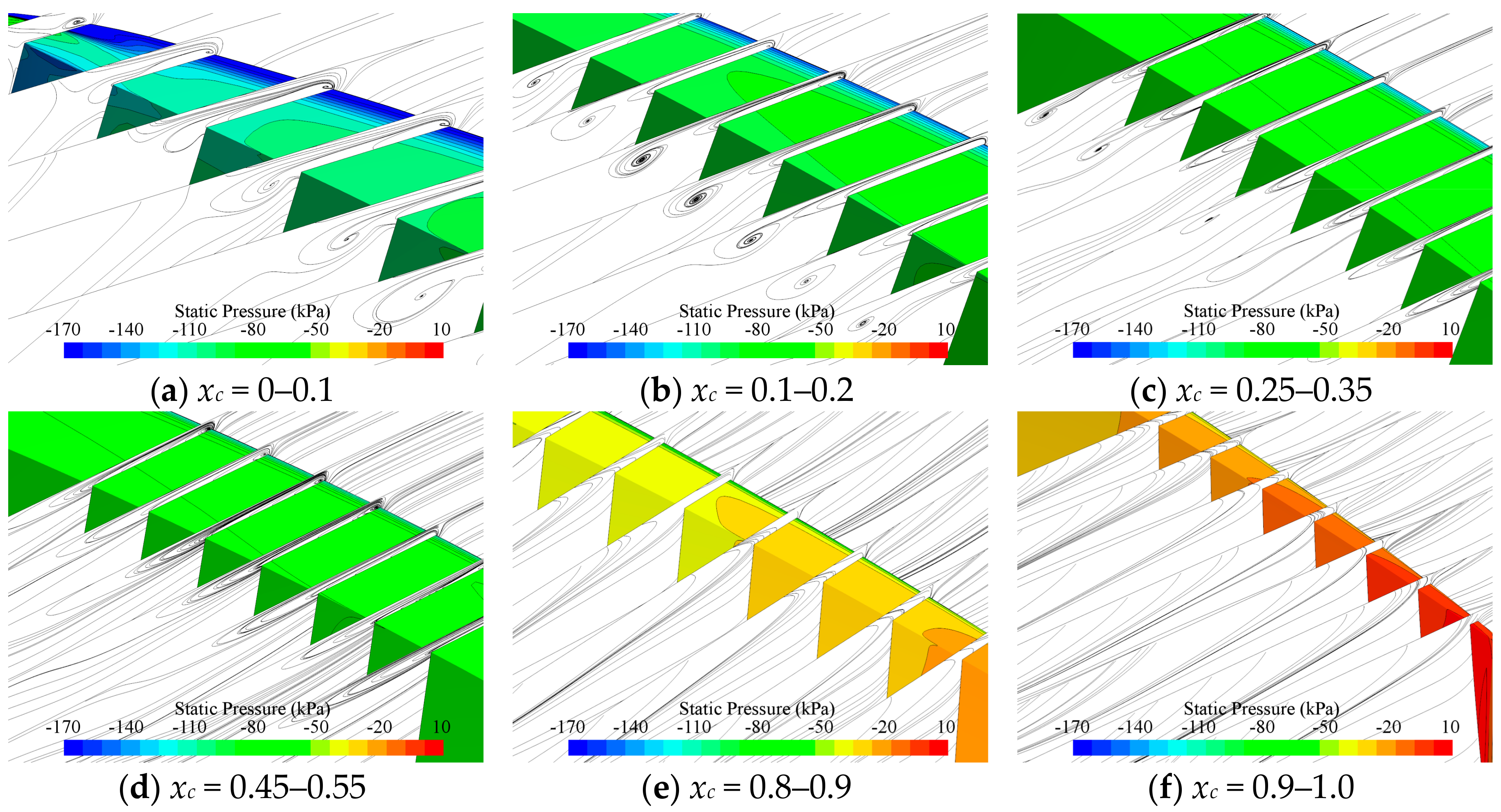
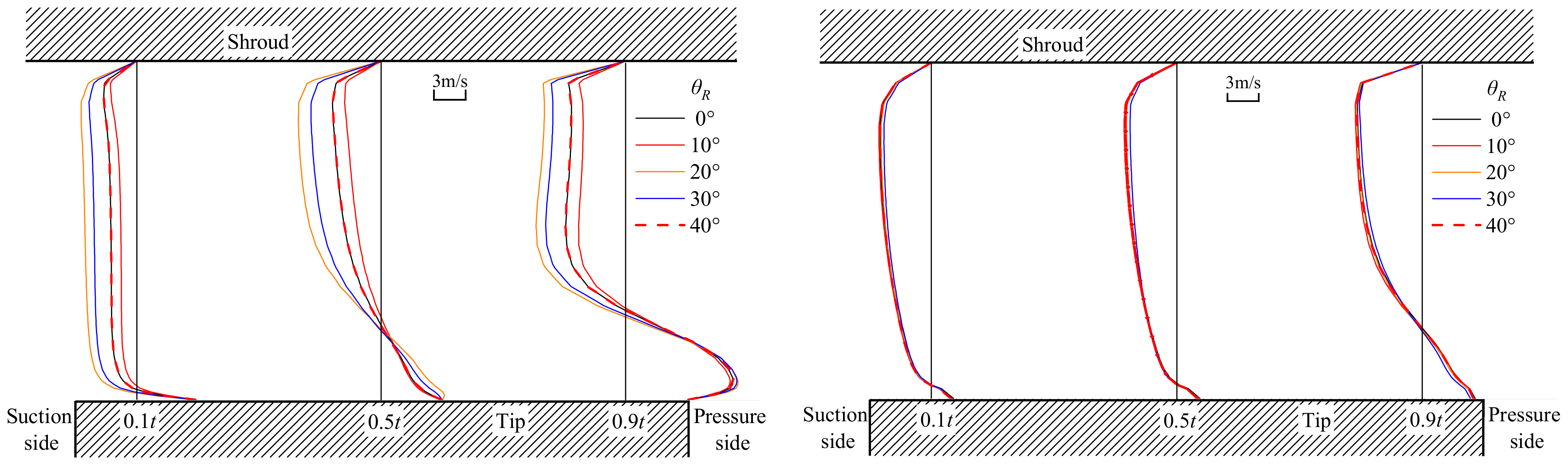
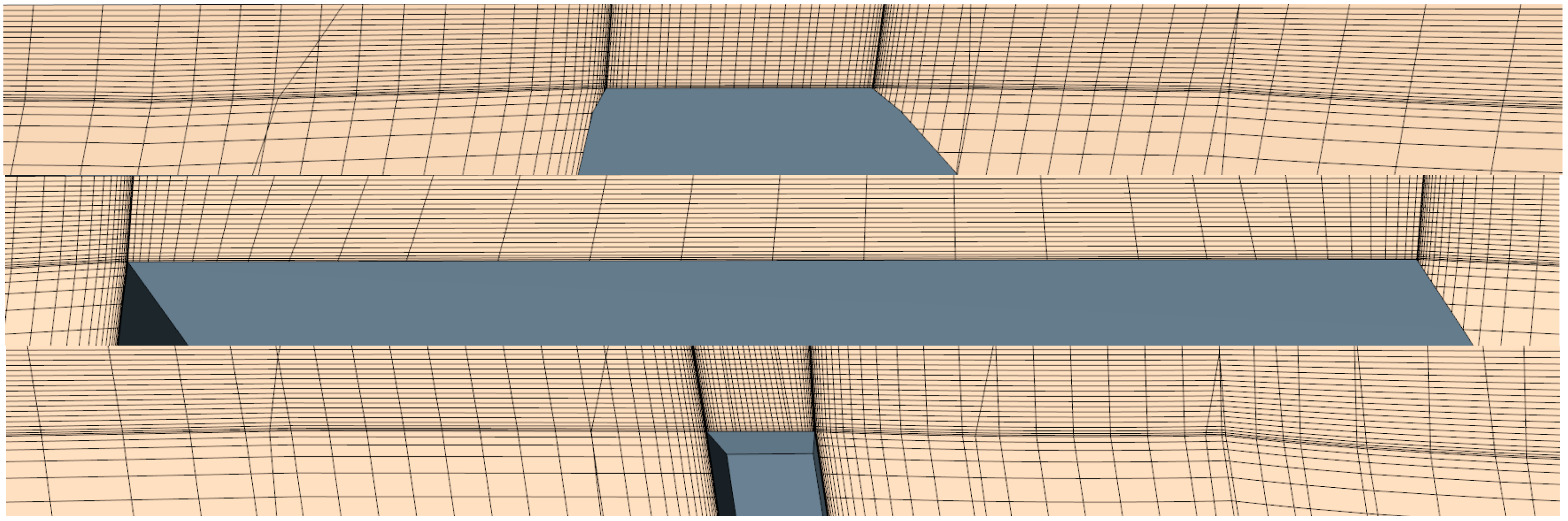
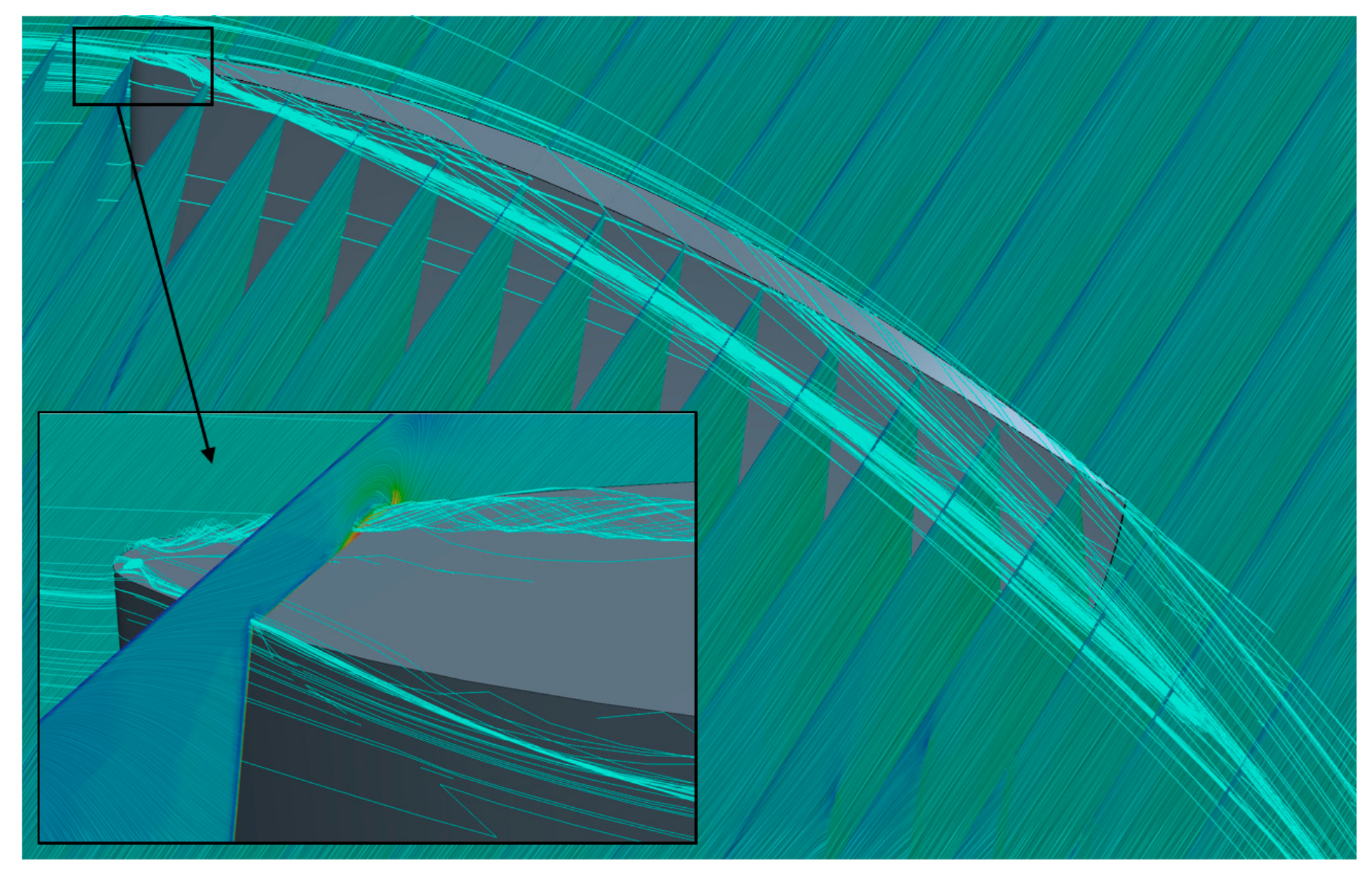
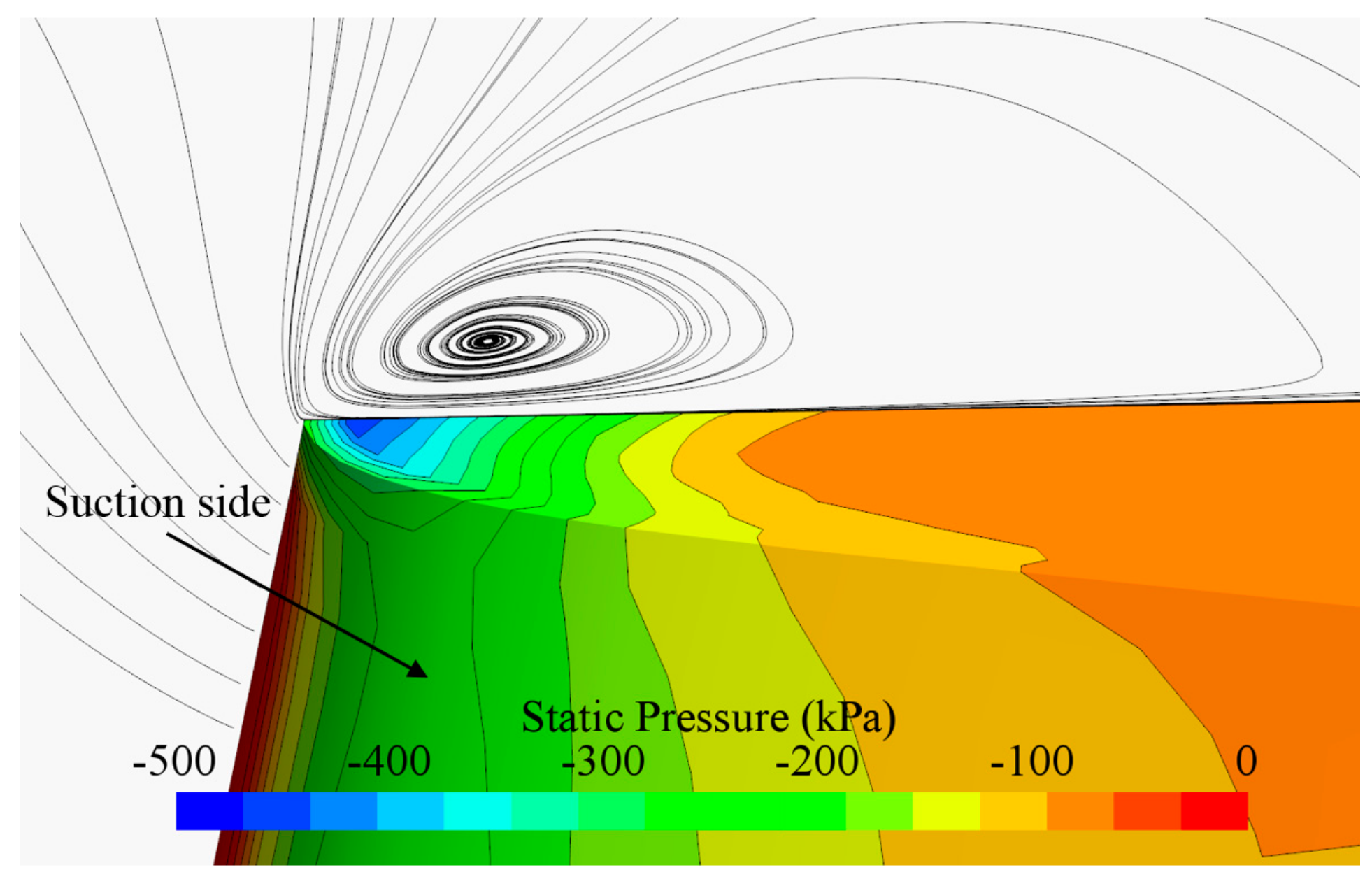
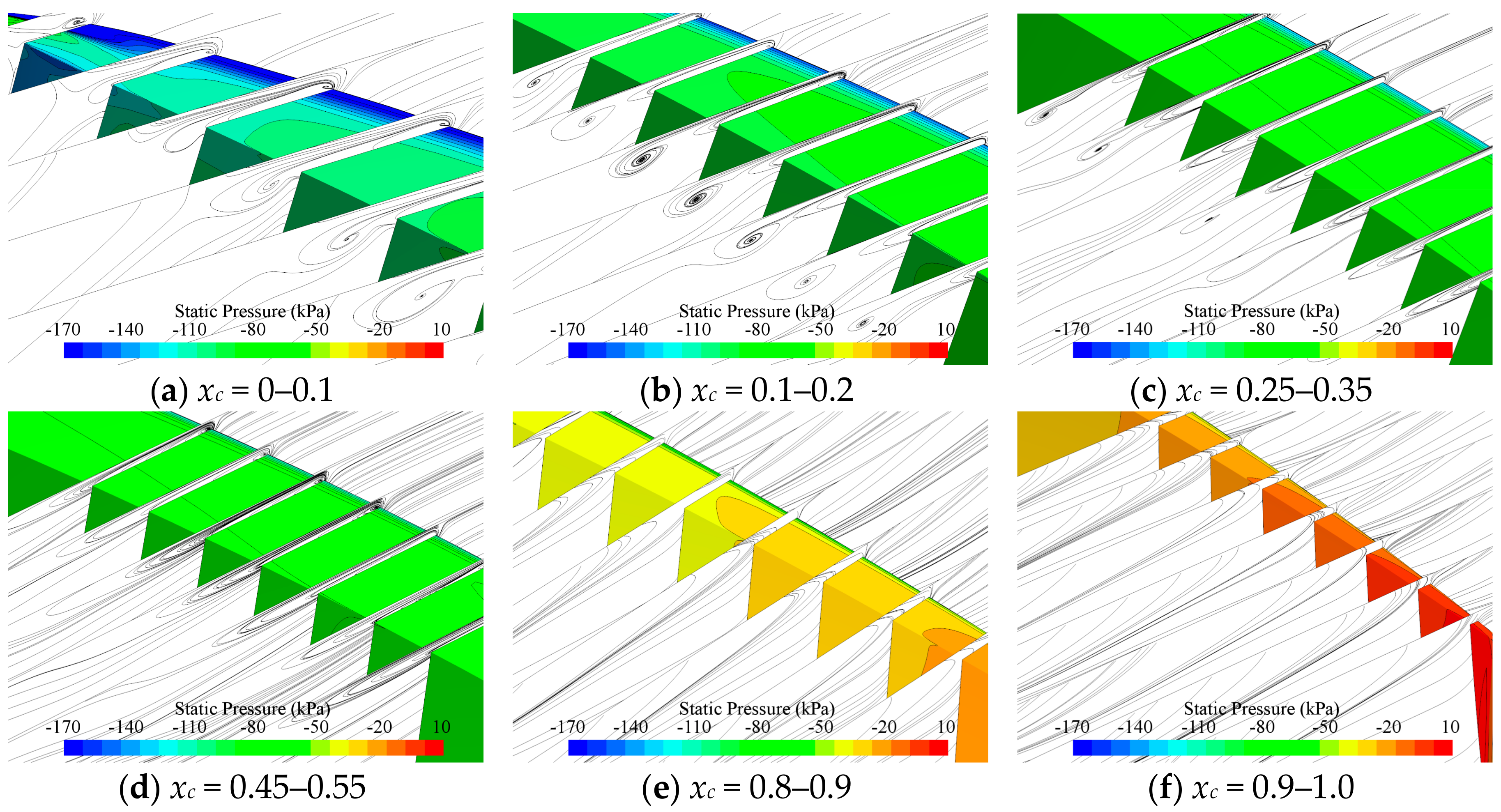
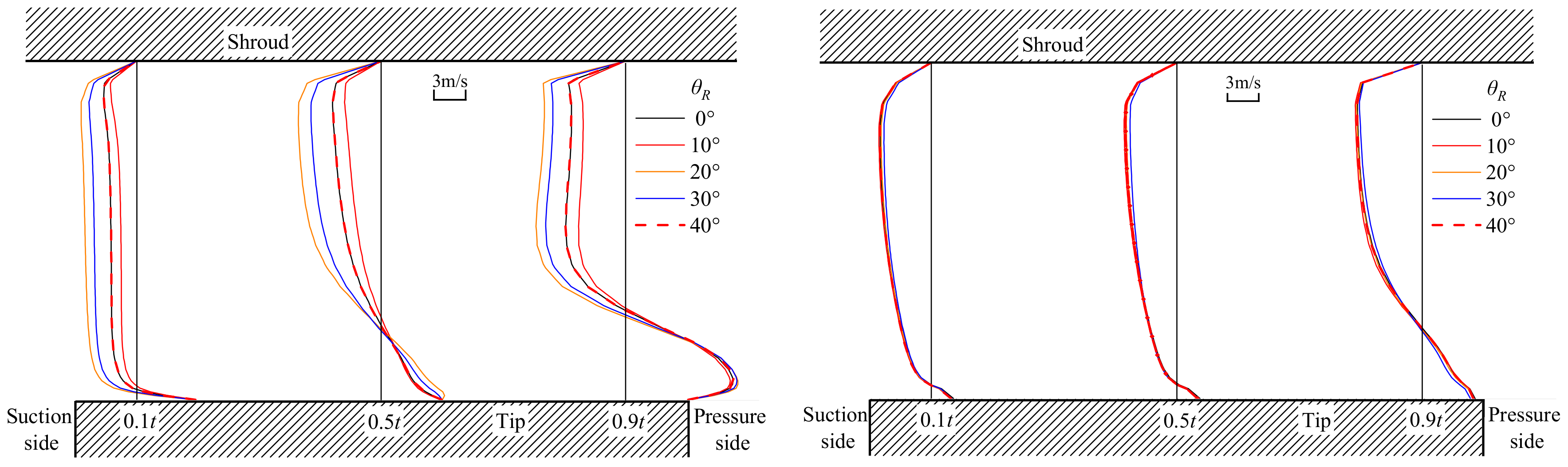
5.1. Tip Clearance Flow
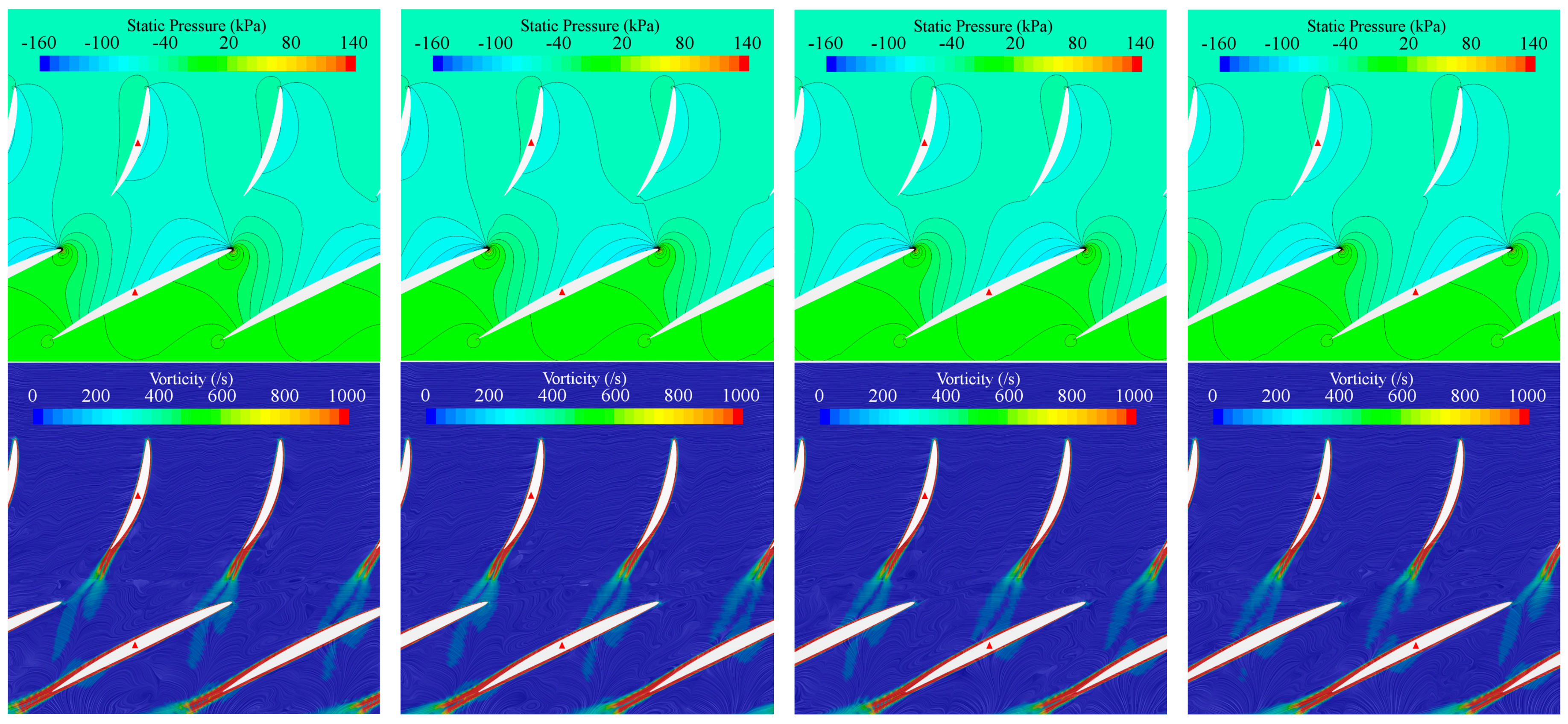
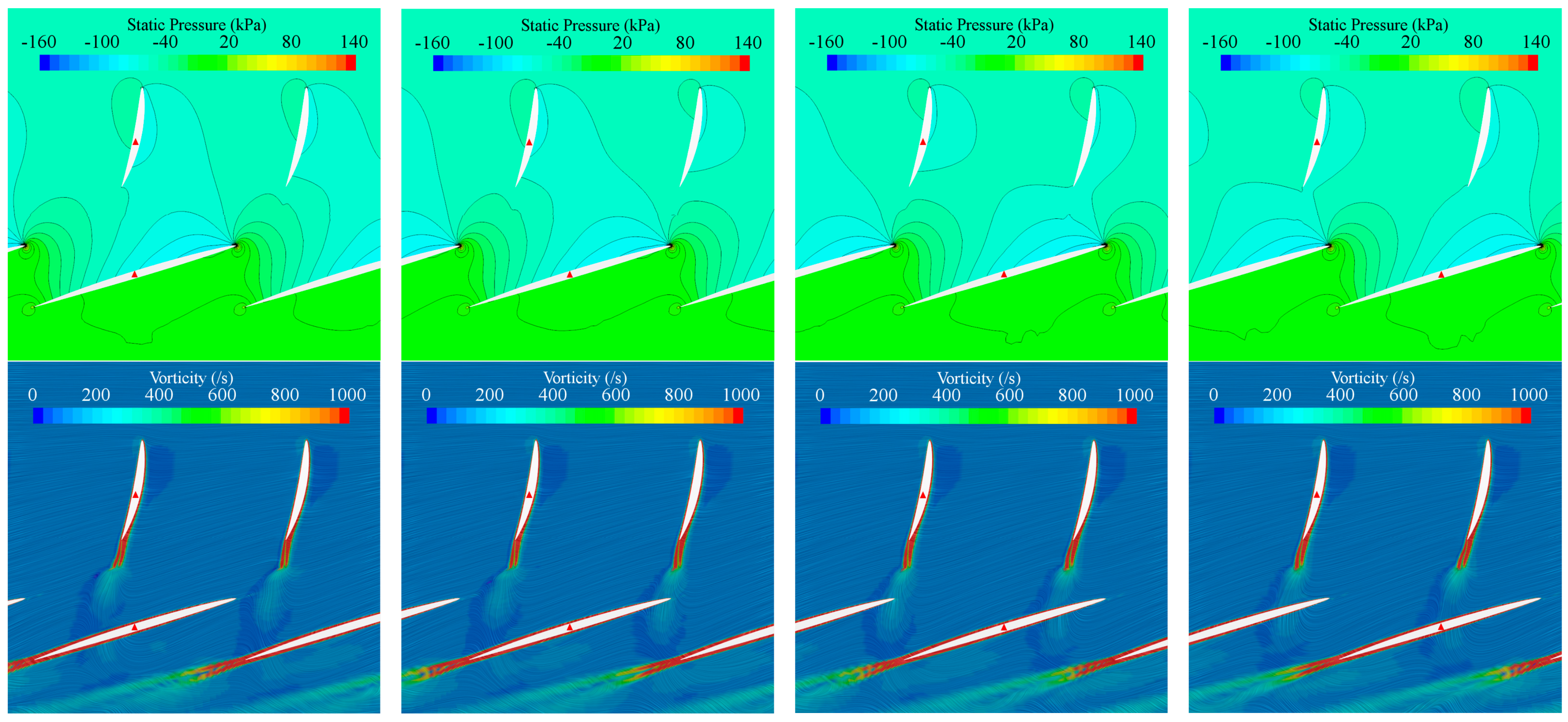
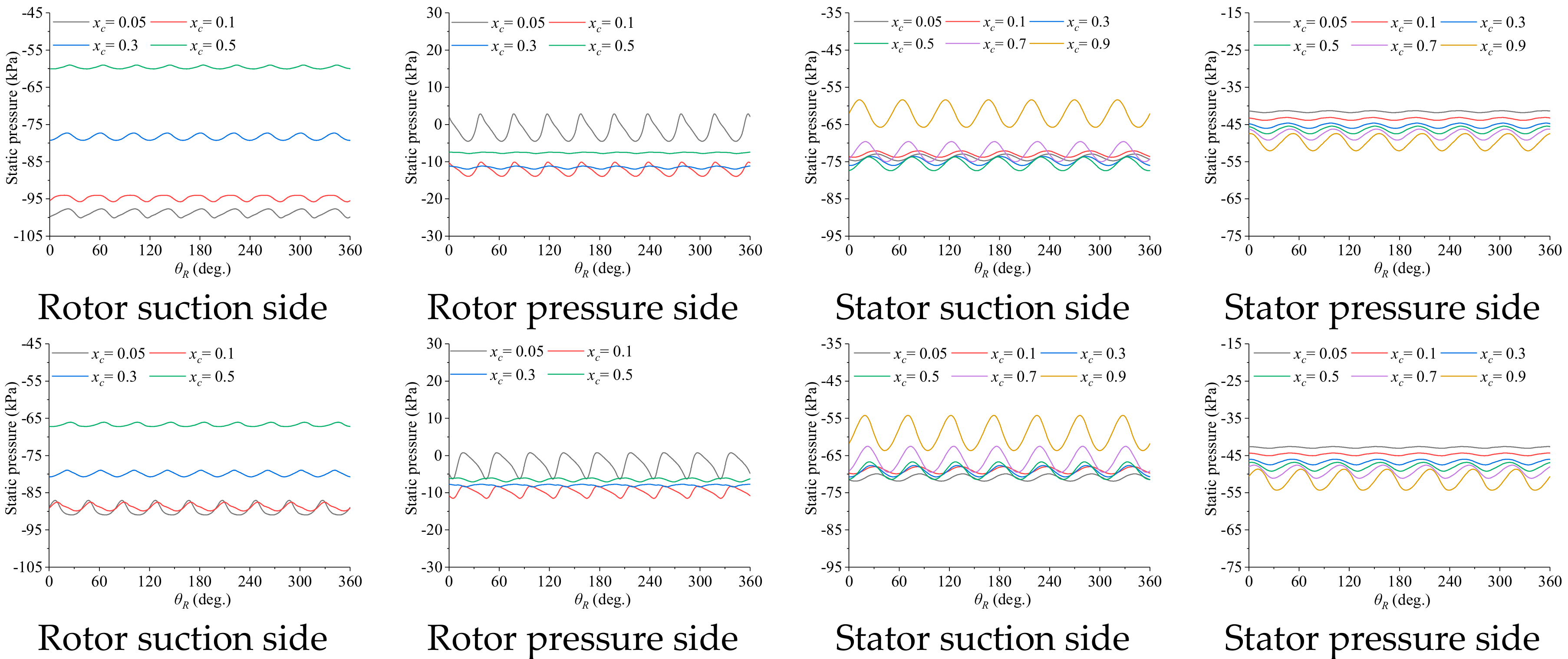
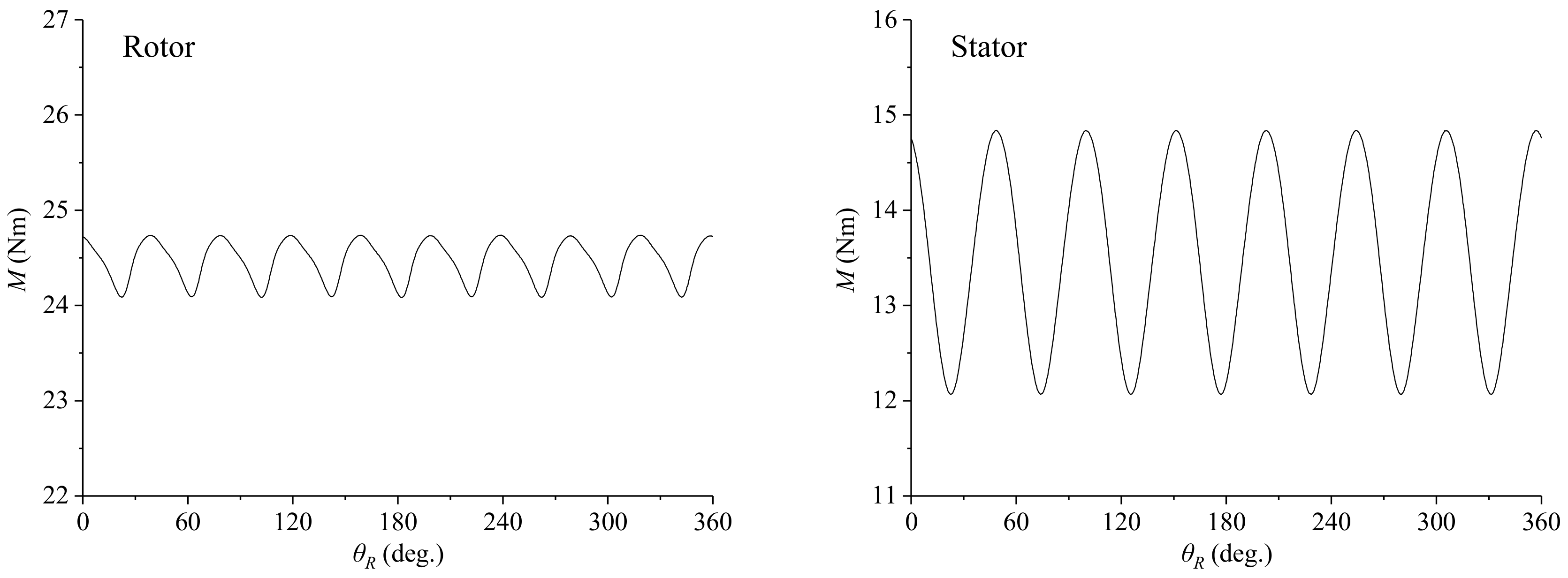
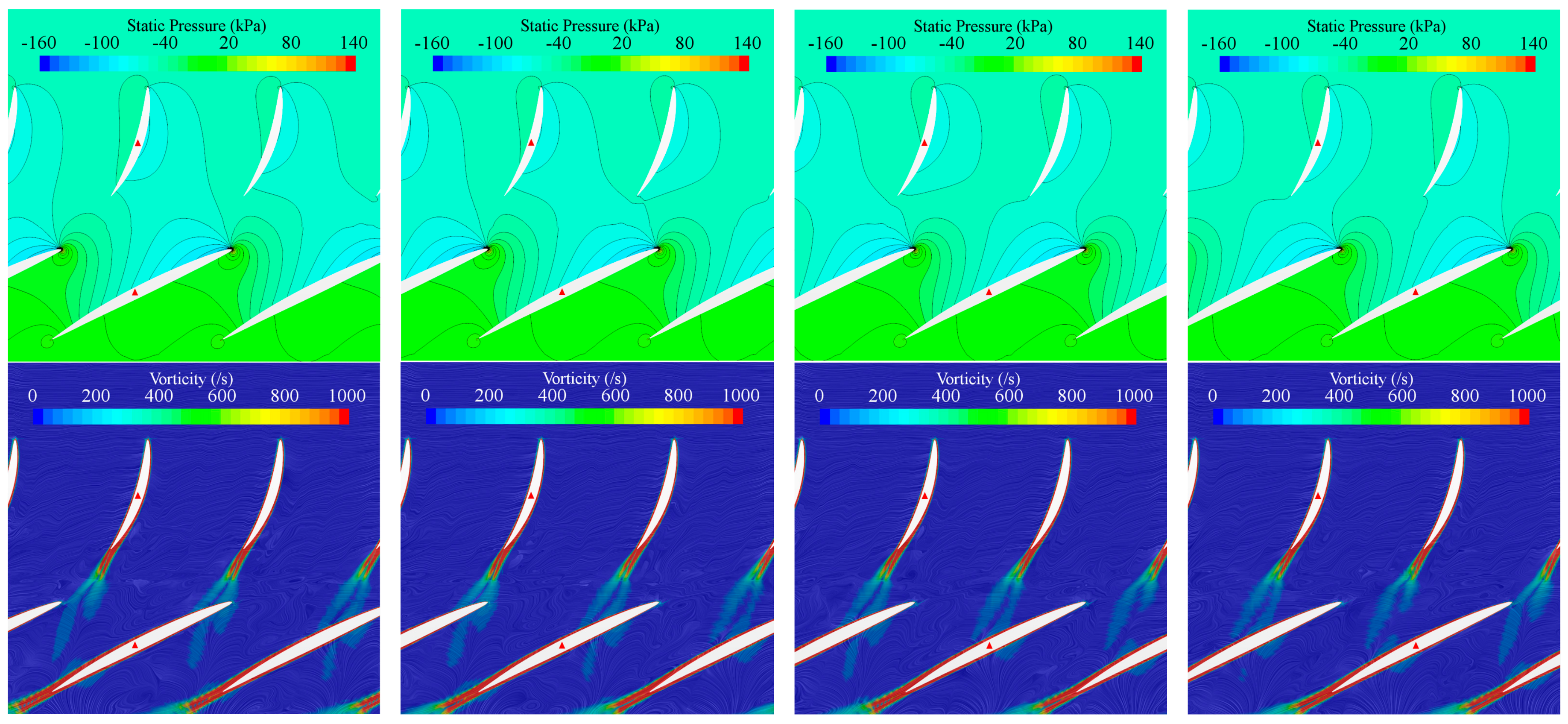
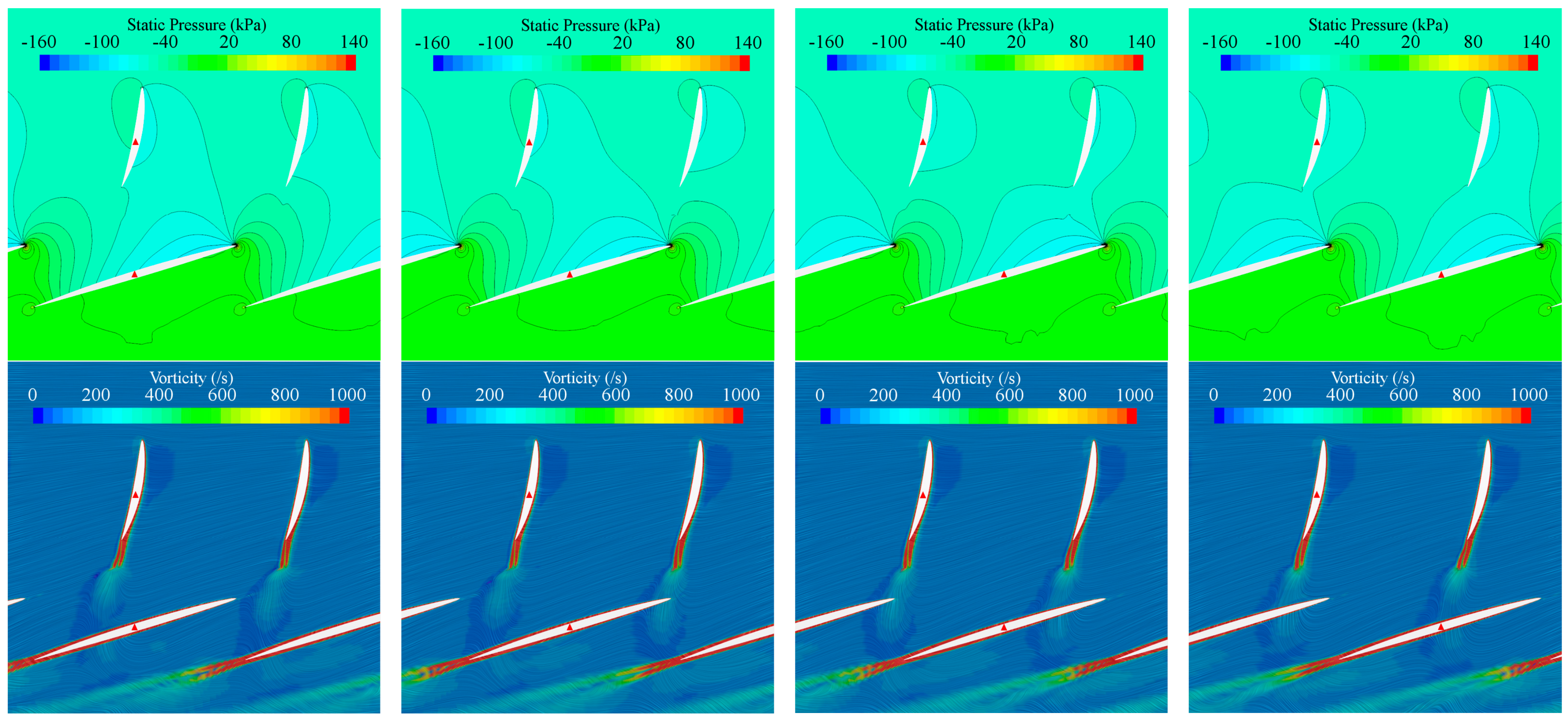
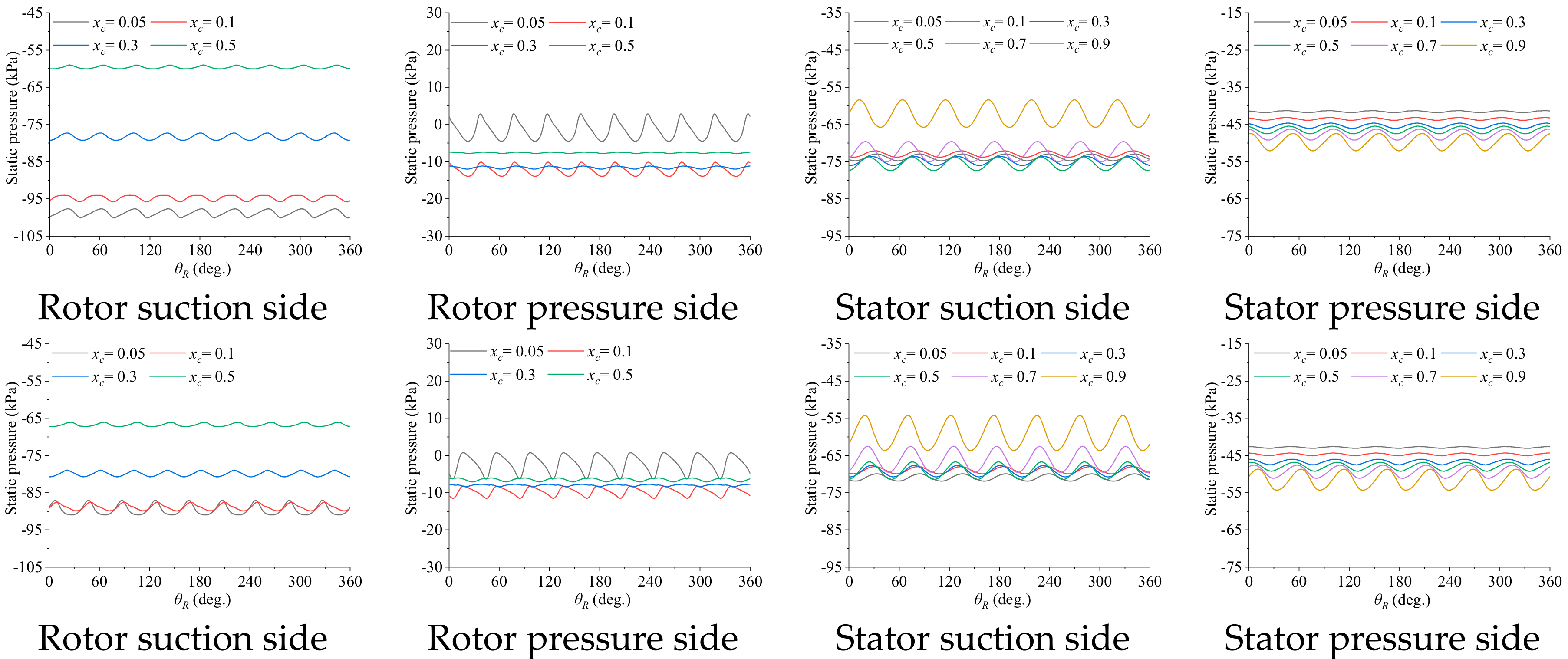
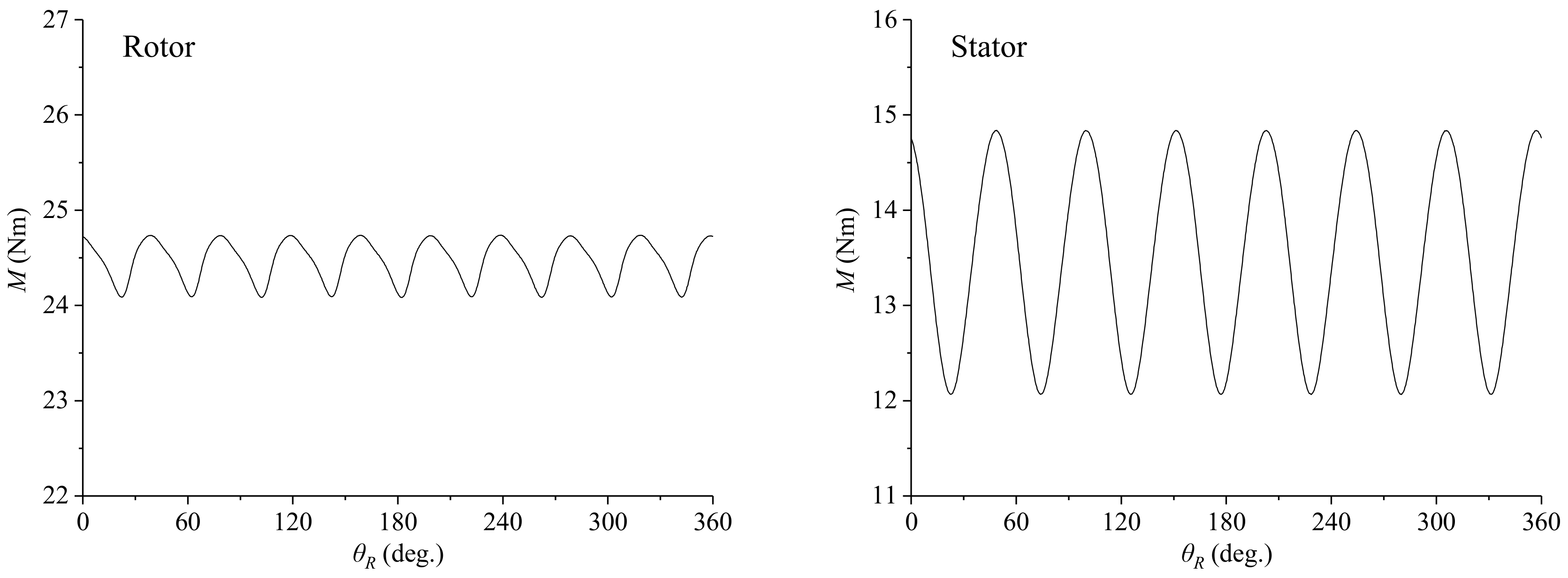
5.2. Interactions between Rotor and Stator Blades
6. Concluding Remarks
Author Contributions
Acknowledgments
Conflicts of Interest
References
- Oberkampf, W.L.; Sindir, M.; Conlisk, A.T. Guide for the Verification and Validation of Computational Fluid Dynamics Simulations; Report No. AIAA G-077-1998; American Institute of Aeronautics and Astronautics: Reston, VA, USA, 1998. [Google Scholar]
- Roache, P.J. Verification and Validation in Computational Science and Engineering; Hermosa: Albuquerque, NM, USA, 1998. [Google Scholar]
- Roache, P.J. Verification of codes and calculations. AIAA J. 1998, 36, 696–702. [Google Scholar] [CrossRef]
- ITTC. Uncertainty analysis in CFD, uncertainty assessment methodology. ITTC-Quality Manual, 4.9-04-01-01. In Proceedings of the International Towing Tank Conference, Shanghai, China, 5–11 September 1999. [Google Scholar]
- ITTC. Uncertainty Analysis in CFD, Guidelines for RANS Codes. ITTC–Recommended Procedures and Guidelines, 7.5-03-01-02. In Proceedings of the International Towing Tank Conference, Seoul, Korea; Shanghai, China, 5–11 September 1999. [Google Scholar]
- Stern, F.; Wilson, R.V.; Coleman, H.W.; Paterson, E.G. Verification and Validation of CFD Simulations; Report No. 407; Iowa Institute of Hydraulic Research: Iowa City, IA, USA, 1999. [Google Scholar]
- Coleman, H.W.; Stern, F. Uncertainties and CFD Code Validation. J. Fluids Eng. 1997, 119, 795–803. [Google Scholar] [CrossRef]
- Richardson, L.F. The approximate arithmetical solution by finite differences of physical problems involving differential equations, with an application to the stresses in a masonry dam. J. Philos. Trans. R. Soc. Lond. Ser. A 1911, 210, 307–357. [Google Scholar] [CrossRef]
- ITTC. Uncertainty analysis in CFD, uncertainty assessment methodology and Procedures. ITTC-Quality Manual, 7.5-03-01-01. In Proceedings of the International Towing Tank Conference, Venice, Italy, 8–14 September 2002. [Google Scholar]
- ITTC. Uncertainty Analysis in CFD, Verification and Validation Methodology and Procedures. ITTC-Recommended Procedures and Guidelines, 7.5-03-01-01. In Proceedings of the International Towing Tank Conference, Wuxi, China, 18 September 2017. [Google Scholar]
- Eça, L.; Vaz, G.; Hoekstra, M. Code verification, solution verification and validation in RANS solvers. In Proceedings of the ASME 2010 29th International Conference on Ocean, Offshore and Arctic Engineering, Shanghai, China, 6–11 June 2010; pp. 597–605. [Google Scholar]
- Larsson, L.; Stern, F.; Visonneau, M. Numerical Ship Hydrodynamics: An Assessment of the 6th Gothenburg 2010 Workshop; Springer Science and Business Media: Berlin, Germany, 2013. [Google Scholar]
- Shen, H.C.; Yao, Z.Q.; Wu, B.S.; Zhang, N.; Yang, R.Y. A new method on uncertainty analysis and assessment in ship CFD. J. Ship Mech. 2010, 14, 1071–1083. [Google Scholar]
- Simonsen, C.D.; Stern, F. Verification and validation of RANS maneuvering simulation of Esso Osaka: Effects of drift and rudder angle on forces and moments. J. Comput. Fluids 2003, 32, 1325–1356. [Google Scholar] [CrossRef]
- Stern, F.; Wilson, R.V.; Coleman, H.; Paterson, E. Comprehensive approach to verification and validation of CFD simulations—Part 1: Methodology and procedures. J. Fluids Eng. 2001, 123, 793–802. [Google Scholar] [CrossRef]
- Zhang, Z.R.; Zhao, F.; Wu, C.S. Research on uncertainty analysis of SUBOFF viscous flow field CFD simulation. In Proceedings of the 2007 Ship Mechanics Conference, Beijing, China, 30 July–1 August 2007. [Google Scholar]
- Yang, Y.R.; Shen, H.C.; Yao, H.Z. Uncertain analysis of CFD simulation on the open-water performance of the propeller. J. Ship Mech. 2010, 14, 472–480. [Google Scholar]
- Rosetti, G.F.; Vaz, G.; Fujarra, A.L.C. URANS calculations for smooth circular cylinder flow in a wide range of Reynolds numbers: Solution verification and validation. J. Fluids Eng. 2012, 134, 121103. [Google Scholar] [CrossRef]
- Diskin, B.; Schwöppe, A. Grid-convergence of Reynolds-Averaged Navier–Stokes solutions for benchmark flows in two dimensions. AIAA J. 2016, 54, 2563–2588. [Google Scholar] [CrossRef]
- Oberkampf, W.L.; Blottner, F.G. Issues in computational fluid dynamics code verification and validation. AIAA J. 1998, 36, 209–272. [Google Scholar] [CrossRef]
- Wilson, R.; Shao, J.; Stern, F. Discussion: Criticisms of the “Correction Factor” Verification Method 1. J. Fluids Eng. 2004, 126, 704–706. [Google Scholar] [CrossRef]
- Rodi, W. Experience with two-layer models combining the k-epsilon model with a one-equation model near the wall. In Proceedings of the 29th Aerospace Sciences Meeting, Reno, Nevada, 7–10 January 1991. [Google Scholar]
- Shih, T.H.; Liou, W.W.; Shabbir, A.; Yang, Z.; Zhu, J. A new k-ε eddy viscosity model for high Reynolds number turbulent flows-model development and validation. Comput. Fluids 1995, 24, 227–238. [Google Scholar] [CrossRef]
- Eça, L.; Hoekstra, M. Code verification of unsteady flow solvers with method of manufactured solutions. In Proceedings of the Seventeenth International Offshore and Polar Engineering Conference. International Society of Offshore and Polar Engineers, Lisbon, Portugal, 1–6 July 2007. [Google Scholar]
- Wang, Z.L. Measurement of the Hydraulic Performance of Axial-Flow Pump Model No.1413; Report No. SM-2016-024; Marine Design and Research Institute of China: Shanghai, China, 2016. [Google Scholar]
- Strasberg, M.; Breslin, J.P. Frequencies of the alternating forces due to interactions of contrarotating propellers. J. Hydronaut. 1976, 10, 62–64. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Grid ID | Maximum Cell Size on Blade Surface (mm) | First-Layer Cell Height from Blade Surface (mm) | Number of Cells in Tip-Clearance | Total Number of Cells (Million) | |||
|---|---|---|---|---|---|---|---|
| Stator | Rotor | Stator | Rotor | Radial | Circumferential | ||
| G3 | 5 | 4 | 0.02 | 0.01 | 10 | 16 | 1.79 |
| G2 | 3.54 | 2.83 | 0.014 | 0.007 | 15 | 22 | 4.87 |
| G1 | 2.5 | 2 | 0.01 | 0.005 | 20 | 30 | 13.17 |
| Grid ID | Stator | Rotor | Tip Clearance |
|---|---|---|---|
| G3 | 3.2–4.2 | 1.9–2.3 | 5.7–5.8 |
| G2 | 2.3–3.0 | 1.4–1.6 | 4.7–4.8 |
| G1 | 1.7–2.3 | 1.0–1.3 | 3.3–3.4 |
| Q (m3/s) | Grid, Time-Step Size | Simulation Result S | Experimental Data D | Comparison Error E (%D) | |||
|---|---|---|---|---|---|---|---|
| H (m) | P(kW) | H (m) | P (kW) | H | P | ||
| 0.35 | G3, Δt3 | 7.320 | 29.473 | 7.450 | 31.341 | −1.47 | −5.96 |
| G2, Δt2 | 7.373 | 29.541 | −1.04 | −5.74 | |||
| G1, Δt1 | 7.406 | 29.584 | −0.59 | −5.61 | |||
| 0.42 | G3, Δt3 | 5.221 | 25.343 | 5.400 | 25.957 | −3.31 | −2.36 |
| G2, Δt2 | 5.247 | 25.414 | −2.83 | −2.09 | |||
| G1, Δt1 | 5.267 | 25.473 | −2.45 | −1.87 | |||
| 0.471 | G3, Δt3 | 3.476 | 20.341 | 3.600 | 20.305 | −3.44 | 0.18 |
| G2, Δt2 | 3.521 | 20.456 | −2.18 | 0.75 | |||
| G1, Δt1 | 3.546 | 20.513 | −1.49 | 1.02 | |||
| Q (m3/s) | G3, Δt3 (%S) | G2, Δt2 (%S) | G1, Δt1 (%S) | |
|---|---|---|---|---|
| 0.35 | H | 0.03 | 0.02 | 0.02 |
| 0.42 | 0.03 | 0.03 | 0.01 | |
| 0.471 | 0.04 | 0.04 | 0.01 | |
| 0.35 | P | 0.03 | 0.02 | 0.01 |
| 0.42 | 0.03 | 0.03 | 0.01 | |
| 0.471 | 0.04 | 0.04 | 0.01 |
| Q (m3/s) | ε21 | ε32 | R | p | C | UGT | USN (%S) | ||
|---|---|---|---|---|---|---|---|---|---|
| 0.35 | H | −0.033 | −0.053 | 0.642 | 1.280 | −0.060 | 0.558 | 0.113 | 1.52 |
| 0.42 | −0.021 | −0.025 | 0.814 | 0.593 | −0.091 | 0.228 | 0.231 | 4.27 | |
| 0.471 | −0.025 | −0.045 | 0.564 | 1.651 | −0.033 | 0.772 | 0.048 | 1.33 | |
| 0.35 | P | −0.043 | −0.068 | 0.625 | 1.355 | −0.071 | 0.599 | 0.129 | 0.41 |
| 0.42 | −0.059 | −0.071 | 0.836 | 0.516 | −0.302 | 0.196 | 0.787 | 3.03 | |
| 0.471 | −0.057 | −0.115 | 0.496 | 2.025 | −0.056 | 1.017 | 0.062 | 0.30 |
| Q (m3/s) | |E| (%D) | UV (%D) | ||
|---|---|---|---|---|
| H | P | H | P | |
| 0.35 | 0.59 | 5.61 | 1.72 | 0.90 |
| 0.42 | 2.46 | 1.86 | 4.35 | 3.14 |
| 0.471 | 1.50 | 1.02 | 1.55 | 0.86 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Qiu, J.-T.; Yang, C.-J.; Dong, X.-Q.; Wang, Z.-L.; Li, W.; Noblesse, F. Numerical Simulation and Uncertainty Analysis of an Axial-Flow Waterjet Pump. J. Mar. Sci. Eng. 2018, 6, 71. https://doi.org/10.3390/jmse6020071
Qiu J-T, Yang C-J, Dong X-Q, Wang Z-L, Li W, Noblesse F. Numerical Simulation and Uncertainty Analysis of an Axial-Flow Waterjet Pump. Journal of Marine Science and Engineering. 2018; 6(2):71. https://doi.org/10.3390/jmse6020071
Chicago/Turabian StyleQiu, Ji-Tao, Chen-Jun Yang, Xiao-Qian Dong, Zong-Long Wang, Wei Li, and Francis Noblesse. 2018. "Numerical Simulation and Uncertainty Analysis of an Axial-Flow Waterjet Pump" Journal of Marine Science and Engineering 6, no. 2: 71. https://doi.org/10.3390/jmse6020071
APA StyleQiu, J.-T., Yang, C.-J., Dong, X.-Q., Wang, Z.-L., Li, W., & Noblesse, F. (2018). Numerical Simulation and Uncertainty Analysis of an Axial-Flow Waterjet Pump. Journal of Marine Science and Engineering, 6(2), 71. https://doi.org/10.3390/jmse6020071