Abstract
Autonomous navigation in unknown; map-free environments is a core requirement for advanced robotics. While significant breakthroughs have been achieved in terrestrial scenarios, extending this capability to the unstructured, dynamic, and harsh underwater domain remains an enormous challenge. This review comprehensively analyzes the mainstream technologies underpinning mapless autonomous underwater navigation, with a primary focus on conventional Autonomous Underwater Vehicles (AUVs). It systematically examines key technical pillars of AUV navigation, including Dead Reckoning and Simultaneous Localization and Mapping (SLAM). Furthermore, inspired by the emerging concept of fourth-generation submersibles—which leverage living organisms rather than conventional machinery—this review expands its scope to include live fish as potential controlled platforms for underwater navigation. It first dissects the sophisticated sensory systems and hierarchical navigational strategies that enable aquatic animals to thrive in complex underwater habitats. Subsequently, it categorizes and evaluates state-of-the-art methods for controlling live fish via Brain-Computer Interfaces (BCIs), proposing a three-stage control hierarchy: Direct Motor Control, Semi-Autonomous Control with Task-Level Commands, and Autonomous Control by Biological Intelligence. Finally, the review summarizes current limitations in both conventional AUV technologies and bio-hybrid systems and outlines future directions, such as integrating external sensors with fish, developing onboard AI for adaptive control, and constructing bio-hybrid swarms. This work bridges the gap between robotic engineering and biological inspiration, providing a holistic reference for advancing mapless autonomous underwater navigation.
1. Introduction
The history of autonomous navigation can be traced back to the 16th century with Leonardo da Vinci’s programmable clockwork cart. This device, utilizing a pre-set cam system for rudimentary path planning, prefigured modern ambitions for autonomous machine locomotion [1]. Significant technological advancements were made in the 20th century, particularly with the development of the Stanford Cart in the 1960s, which was capable of navigating complex environments using a combination of cameras and sensors [2]. This laid the groundwork for autonomous navigation systems. In 1977, the mechanical engineering lab in the University of Tsukuba has first constructed a computerized driverless car [3,4], which laid a crucial foundation for the development of modern autonomous driving technology. In the late 20th century, the pace of development was significantly accelerated by large-scale, government and industry funded research programs. Notable among these was the NavLab series of Carnegie Mellon University in the United States, through which a fully functional self-driving car named ALVINN (Autonomous Land Vehicle In A Neural Network) was built for the first time using neural networks [5,6]. Concurrently in Europe, the PROMETHEUS programme spurred similar efforts, leading to a landmark 1994 demonstration where Ernst Dickmanns’s vision-guided vehicles drove over 1000 km in live traffic on a Paris highway at speeds up to 130 km/h [7,8]. In the 21st century, with the advent of more powerful computing resources, the integration of advanced sensors and the proliferation of data, the field of autonomous navigation has matured rapidly. Yet, as the frontiers of robotic exploration expand, the ambition of autonomy is now moving from structured terrestrial roads to the largest, most unstructured, and least understood environment on Earth: the ocean.
The ocean, covering more than 70% of the Earth’s surface, is crucial for sustainable human development. It plays an indispensable role in regulating global climate, supporting biodiversity, and providing resources for food and medicine [9]. Despite its significance, the ocean remains one of the least explored and understood frontiers on our planet. It has been estimated that over 80% of the ocean remains unmapped, unobserved, and unexplored [10]. For both exploration and assessment of the ocean environment, specialized marine monitoring equipment is indispensable. Modern ocean exploration often relies on Autonomous Underwater Vehicles (AUVs) [11]. Such vehicles can endure long-term missions in harsh underwater environments that are inaccessible to human beings. However, the full potential of AUVs is often constrained by their reliance on pre-existing maps or remote human supervision. To fully realize the potential of AUVs, AUVs must achieve mapless autonomous navigation—the ability to explore and operate in entirely unknown regions without prior information or continuous external guidance. This would enable them to conduct long-term, wide-ranging exploration in unstructured environments, operating untethered from a support vessel and without continuous human supervision [12].
It is important to note that a primary application for conventional AUVs is systematic seafloor mapping, a task for which they are exceptionally well-suited. However, the scope of this review focuses specifically on the more challenging paradigm of mapless autonomous navigation. This capability is critical for a distinct class of missions where pre-existing maps are unavailable or insufficient, such as exploratory reconnaissance in unknown cave systems, inspection of damaged infrastructure, or adaptive surveillance and tracking in dynamic environments.
Navigating without a map in underwater environments presents unique challenges that are fundamentally different and more complex than those on land. While terrestrial vehicles can rely on GPS for precise global positioning and high-bandwidth electromagnetic waves for perception and communication, these technologies are largely ineffective underwater due to the rapid attenuation of radio waves and light in water, especially in turbid conditions [13,14]. Table 1 outlines these key differences.

Table 1.
Core Differences in Autonomous Navigation between terrestrial and underwater.
To overcome these underwater challenges, researchers have developed a suite of specialized technologies including acoustic systems [15], inertial navigation [16], and Simultaneous localization and mapping (SLAM) techniques [17].
Moreover, with the emergence of the concept of the fourth-generation submersibles, which are based on living organisms rather than conventional machinery, this review extends the scope of its analysis to include live fish as the controlled object [18]. The main purpose of using live fish to replace machinery is the dramatic reduction of operational costs. Without the use of a battery, there is no need to use a mothership for maintenance. This is the most costly link for the operation of AUVs. Based on this concept, using live fish as a platform offers unmatched advantages that directly address the fundamental shortcomings of conventional AUVs. Biologically, they possess superior energy efficiency by converting food into propulsion unlike battery-reliant systems; they exhibit unparalleled maneuverability and hydrodynamic performance in complex fluid environments; and they have an innate stealth with minimal acoustic signatures, reducing environmental disturbance [19]. These biological advantages offer a transformative potential for specific, high stakes missions. For example, their ability to forage and leverage biological metabolism could enable multi-month persistence for tasks like long-term ecological monitoring, a task that is impossible for battery-powered systems [18]. Their superior maneuverability is ideal for navigating intricate structures like underwater caves or dense aquaculture nets, which is highly challenging for rigid, thruster-driven vehicles [20]. Similarly, their innate biological camouflage and silent propulsion make them ideal for covert surveillance or sensitive wildlife observation, far exceeding that of any conventional mechanical system [19]. However, controlling a living organism as a robotic platform introduces a novel set of challenges that are completely distinct from operating a conventional AUV. We cannot simply send direct commands to actuators or receive high-fidelity sensor data through a fiber-optic cable. The control paradigm shifts from direct mechanical actuation to indirect biological stimulation.
This paper provides a comprehensive analysis of mapless autonomous navigation. The remaining of the paper is structured as follows. Section 2 discusses the four key problems of mapless navigation and reviews the current technological solutions for conventional AUVs. Section 3 examines how these problems are solved in nature by aquatic animals. Section 4 reviews the current technologies in controlling living organisms for underwater navigation. Finally, Section 5 provides a conclusion and discusses the existing challenges and future directions for utilizing live fish as underwater monitoring platforms.
2. Conventional AUV Navigation
Current AUV navigation primarily focuses on four core areas: Positioning and Navigation; Environmental Perception and Modeling; Path Planning; and Motion Control. Since the specific details of motion control varies significantly with the features of the controlled subject, this section will primarily focus on the first three aspects.
2.1. Dead Reckoning
Dead reckoning is a fundamental navigation process used to estimate the current position of a vehicle by propagating a previously known position based on its velocity and direction over time. Because it does not need to directly perceive external environmental features for localization, it was one of the earliest ideas proposed for mapless autonomous navigation. In modern systems, dead reckoning is primarily implemented using Inertial Navigation System (INS) to track linear and angular motion by using accelerometers and gyroscopes. In order to compensate for the rapid error growth in pure INS, these systems are often equipped with Doppler Velocity Logs (DVLs) for underwater platforms, which provide more direct and accurate velocity measurements to reduce drift.
2.1.1. Inertial Navigation Systems (INS)
The primary technology for implementing dead reckoning in modern AUVs is the Inertial Navigation System (INS). INS uses a combination of sensors—typically accelerometers (to measure linear acceleration), gyroscopes (to measure angular velocity), and a magnetometer or compass (to establish an absolute heading reference)—to measure the linear acceleration and angular velocity of the vehicle. By integrating these measurements over time, the system can estimate the vehicle’s position and orientation relative to a known starting point [21].
While early INS designs utilized complex mechanical gimbal systems to isolate sensors from vehicle motion, this technology is now largely obsolete for AUVs due to its bulk, cost, and mechanical complexity [22]. Modern AUVs almost exclusively employ Strapdown Inertial Navigation Systems (SINS) [23]. In a SINS, the inertial sensors are “strapped down” directly onto the body of the AUV, eliminating the need for complex gimbal assembly [24]. The working principle of a SINS involves integrating angular velocity data from gyroscopes to precisely calculate the vehicle’s real-time attitude. This attitude information is then used to mathematically transform the acceleration measurements from the vehicle’s rotating body frame into a stable, nonrotating navigation frame [25,26]. The key difference among various SINS lies in the gyroscope technology [27]. Optical gyroscopes, which include Ring Laser Gyros (RLGs) and Fiber-Optic Gyros (FOGs), are both based on the Sagnac effect [28]. These solid-state designs have no moving parts and result in high stability and low drift, making them the standard for high-end navigation suites. Micro-electro-mechanical systems (MEMS) gyroscopes operate on the Coriolis effect induced by a vibrating microstructure. Although they generally exhibit lower precision than their optical counterparts, MEMS sensors provide an attractive alternative due to their compact size and lower power consumption [13].
However, the core challenge of any INS is the unbounded growth of error over time [21]. The process of calculating position involves a double integration of acceleration measurements. Any small, persistent error in the accelerometer readings or inaccuracies in the attitude calculation from gyroscope data will be integrated, leading to a velocity error that grows linearly with time and a position error that grows quadratically with time [21]. Although an AUV can periodically surface to correct its position using GPS, this is not feasible for certain long-term, secret missions. Therefore, for AUVs operating in environments where external position corrections like GPS are unavailable, this rapid error accumulation makes pure SINS navigation unsuitable for long-term, high-precision AUV navigation [29]. Traditional solutions for this problem include utilizing a magnetic compass and a depth sensor. The depth sensor provides an absolute reference for vertical position, and the compass provides an absolute heading reference. Nowadays, such problems are often solved by integrating SINS with Doppler Velocity Logs (DVLs) and Kalman filtering (KF) techniques [13].
2.1.2. Doppler Velocity Log (DVL)
To counter the cumulative error problem in INS, AUVs are often equipped with Doppler Velocity Logs (DVLs) [13]. DVLs use the Doppler effect to measure the velocity of the AUV relative to the seafloor. By emitting sound waves and analyzing the frequency shift of the returned signals, DVLs can provide direct and accurate measurement of the vehicle’s velocity. This information is fused with the INS data within a filtering framework to bound cumulative error and improve the robustness of the navigation estimate [30].
The core of the DVL’s measurement principle lies in the transmission of acoustic signals and the analysis of their echoes. A DVL typically consists of a transducer assembly with several acoustic beams, commonly arranged in a downward-facing Janus configuration [31]. Each transducer emits a short acoustic pulse of a known frequency . This sound wave travels through the water, reflects off the seafloor, and returns to the transducer. Due to the AUV’s motion relative to the seafloor, the received echo has a frequency of that is shifted from the transmitted frequency [32]. The magnitude of this Doppler shift is directly proportional to the AUV’s velocity along the axis of that specific acoustic beam. For a single beam angled at from the DVL’s vertical axis, this relationship can be described by Equation (1) [33].
Here, represents the speed of sound in water that varies with temperature, salinity, and pressure. The choice of the operating frequency involves a fundamental trade-off: higher frequencies offer higher velocity resolution and precision but are more rapidly attenuated by the water, limiting their effective range. Conversely, lower frequencies can achieve bottom-lock at much greater altitudes but at the cost of lower resolution [34].
Current DVL research is focused on advancing transducer configurations, signal processing, and algorithmic solutions [35]. The four-beam Janus configuration is standard due to its measurement redundancy [36,37]. Recent investigations are extending to more complex multi-beam systems, such as eight-beam “double Janus” configurations proposed by Zhou Bowen and Weijie [38], to enhance performance in varied operational conditions [39]. Signal processing has advanced from narrowband to broad-band techniques employing coded pulses and correlation-based matched filtering [40,41]. This decouples the conventional trade-off between operational range and resolution, achieving higher velocity precision than narrowband systems. In hardware, Burdyny et al. [42] developed a phased-array technology for DVLs that utilizes a single element array for electronic beamforming and steering. This approach offers a more compact, low-drag design with software-based dynamic beam optimization [43]. Algorithmic developments improve bottom-tracking robustness over complex terrains. For instance, Yang et al. [44] proposed a Robust Interacting Multiple Models (RIMM) information fusion algorithm that detects DVL beam anomalies in complex underwater environments and updates a Markov transfer probability matrix to enable rapid model matching. To address challenges on soft seabed, another study developed a data-driven cooperative localization algorithm to compensate for errors caused by vehicle track slippage using a velocity prediction model based on multi-output least squares support vector regression (MLSSVR) [45]. The integration of machine learning is also a key research area, such as the Underwater DVL Optimization Network (UDON) proposed by Zhang et al. [46], which uses a deep learning approach to enhance velocity vector accuracy by compensating for external interference. Further accuracy improvements have been achieved through other computational methods. Klein et al. [47] developed an algorithm to estimate the velocity vector during complete DVL outages using past measurements and a motion model, while Zhu [48] proposed an improved optimal alignment method for SINS based on a reverse navigation algorithm to enhance the precision of the integrated system.
2.1.3. Kalman Filtering (KF)
Although INS provides high-frequency, continuous, and comprehensive navigation parameters, its accuracy degrades over time due to error accumulation. Conversely, the DVL delivers high-precision, low-frequency velocity information but is susceptible to environmental interference and cannot independently determine position or attitude. To leverage these complementary strengths, a filtering framework is required to take full advantage of the drifting data from the INS and the noisy measurements from the DVL. In 1960, Rudolf E. Kalman introduced a recursive solution for the discrete data linear filtering problem, which provides a statistically optimal estimate of a system’s state [49].
The standard Kalman filter is a recursive estimator designed for linear dynamic systems subjected to Gaussian noise, operating under the principle of minimizing the mean square error. However, the dynamics of AUVs are inherently non-linear, which makes the direct application of the standard KF impractical. This limitation has led to the development of numerous variants of Kalman Filter. Table 2 provides an overview of these common variants, detailing their core principles and primary applications within the AUV community:
Table 2.
Common Variants of Kalman Filter.
2.2. Simultaneous Localization and Mapping (SLAM)
SLAM enables a robot to construct a map of an unknown environment while concurrently determining its own position within that map [17,61]. In contrast to dead reckoning methods, which estimate position through internal sensor measurements, SLAM utilizes external environmental features to build and continuously update a map. This map is then used to refine the vehicle’s self-localization, providing a robust solution for autonomous navigation in uncharted territories [13].
2.2.1. Sensor Technologies for Underwater SLAM
For underwater environments, the strong absorption and scattering of near-infrared light makes standard terrestrial LiDAR systems ineffective. Consequently, underwater SLAM primarily relies on acoustic and visual sensing modalities. These sensors are often integrated with Inertial Navigation Systems (INS) and Doppler Velocity Logs (DVLs) to provide robust state estimation by compensating for individual sensor limitations and providing complementary information.
Acoustic sensors are fundamental for long-range environmental perception in underwater domains. These include a range of technologies, from basic bottom depth measurement to high-resolution seafloor imaging. The simplest form of these sensors is the Single beam echo sounders (SBES), which provides discrete seafloor depth measurements directly beneath the vehicle, primarily used for basic bathymetry and depth control [62]. Building upon this, multibeam echo sounders (MBES) emit multiple narrow acoustic beams to cover a wide swath of the seafloor, generating dense 3D bathymetric maps for detailed seafloor mapping and terrain-aided navigation [63,64]. Moreover, inspired by the Synthetic Aperture Radar on land, Synthetic Aperture Sonar (SAS) has been developed to achieve high-resolution seafloor imaging by synthesizing a larger aperture through the vehicle’s motion [65,66]. Building on this technology, interferometric Synthetic Aperture Sonar (InSAS) uses phase difference of acoustic signals recorded at two vertically separated receivers to simultaneously generate a bathymetric grid from the same data [67]. This method synthetically creates a longer sensor aperture by combining several sonar pings, thus producing a higher resolution image. Other sensor technologies like forward looking sonars (FLS) provides acoustic imagery of the water column and seafloor ahead of the AUV, primarily utilized for obstacle avoidance and short-range navigation in complex environments [68]. Despite their fundamental role, acoustic systems face significant challenges, particularly in complex or noisy aquatic environments. They are often susceptible to signal attenuation, multi-path interference, and high ambient noise levels, which can degrade performance and reliability [69]. These limitations highlight the need for complementary or alternative sensing modalities.
In addition to acoustic sensors, visual sensors are also employed in underwater SLAM systems. The most common are stereo vision systems. These systems employ two or more cameras, providing direct depth information (i.e., distance from the camera) and accurate 3D reconstruction [70]. Several configurations and algorithms have been proposed to optimize underwater stereo vision in dynamic environments [71,72]. Moreover, in 2007, Davison et al. [73] developed an algorithm for monocular visual SLAM that utilizes a feature-based approach to track key points across frames, which can estimate localization and mapping in conditions where only a single camera is available. However, both monocular and stereo systems are significantly impacted by severe light attenuation. Such attenuation is wavelength-dependent, thus rapidly filtering out color information and backscattering from suspended particles. These effects degrade image quality, obscure features, and reduce effective range, often leading to a high failure rate for feature-based algorithms in turbid conditions [74]. To address these issues, SLAM systems using laser line scanners have been developed. These systems often combine a 2D LIDAR with an Inertial Measurement Unit to estimate 6DOF motion. The IMU provides attitude information (roll and pitch), which is used to transform the planar laser scan into a stabilized coordinate frame before it is matched against a 2D occupancy grid map [75]. Based on this technology, different algorithms and configurations have been developed. For the estimation component, Grisetti et al. [76] improved Rao-Blackwellized particle filters by incorporating the latest sensor observation into the proposal distribution and by using an adaptive resampling strategy to reduce particle depletion. Other methods were developed to improve map consistency under challenging conditions, such as noisy sensor data [77]. To correct for accumulated drift over longer trajectories, Hess et al. [78] proposed a real-time method for loop closure that adjusts the map upon revisiting a known area.
2.2.2. Key Algorithms in Underwater SLAM
The core of SLAM lies in processing complex data from diverse sensors and integrating it to achieve precise localization and mapping. Key algorithmic approaches include filter-based methods and graph-based methods.
Filter-based SLAM approaches maintain a joint probability distribution over the robot’s pose and the map features. Commonly employed algorithms include the Extended Kalman Filter (EKF) and Unscented Kalman Filter (UKF). EKF linearizes system dynamics and measurement models using first-order Taylor series expansions, while UKF utilizes a deterministic set of ’sigma points’ to approximate the posterior distribution, generally offering improved performance for non-linear systems without requiring explicit Jacobian calculations [52]. However, a critical consideration for both EKF and UKF is their cubic computational complexity with respect to the number of map features, which limits their scalability for extensive mapping tasks [61].
Graph-based SLAM transforms the problem into a pose graph optimization. Robot poses are represented as nodes, and spatial constraints between these poses are represented as edges [79,80]. These spatial constraints can be derived from motion measurements between consecutive poses (from odometry or DVL/INS readings), observations of the environment at a given pose, or loop closure when a previously visited location is recognized. The entire graph is then optimized to minimize the accumulated error from these nodes and edges, leading to a globally consistent map and trajectory. In 2016, Google introduced the Cartographer algorithm, a real-time graph-based SLAM framework designed for large-scale environments [78]. Concurrently, ORB-SLAM, proposed by Mur-Artal et al. [81] in 2015, emerged as a versatile and accurate monocular, stereo, and RGB-D SLAM system. Both Cartographer and ORB-SLAM represent mainstream graph optimization algorithms in modern SLAM research. Other algorithms include Incremental smoothing and mapping (iSAM), which allows for efficient updates to the graph without reoptimizing the entire structure [82,83].
Beyond these core algorithmic frameworks, loop closure detection is also a crucial component for ensuring long-term accuracy in SLAM. It recognizes previously visited locations, introducing constraints that correct accumulated drift and ensure the global consistency of the map and trajectory.
In visual SLAM, loop closure detection typically involves extracting robust visual features from the current camera frame. These features are then compared against a database of features from previously visited keyframes. Typical algorithms include Scale-Invariant Feature Transform (SIFT) [84], Speeded Up Robust Features (SURF) [85], and Oriented FAST and Rotated BRIEF (ORB) [86]. Once candidate matches are found, geometric verification is performed to confirm the spatial consistency of the match, thereby rejecting false positives. Recent advancements include leveraging deep learning-based methods for more robust feature description and place recognition, which can better handle variations in lighting, viewpoint, and appearance in underwater environments [87].
For acoustic SLAM, loop closure detection relies on processing sonar data. The two primary methods are scan matching and feature-based matching [13]. Scan matching algorithms, such as variants of Iterative Closest Point (ICP), are frequently used to align the point cloud from a current sonar scan , with the point cloud representing an existing map segment [88]. This process involves finding the optimal rotation matrix R and translation vector t that minimize an error metric, typically the sum of squared distances between corresponding points:
where and are corresponding points. If the ICP algorithm converges with a low final error and a sufficient number of overlapping points, a loop closure is confirmed. Alternatively, feature-based approaches match distinct acoustic landmarks (e.g., seafloor structures or man-made objects) extracted from sonar data against a map of known features [89]. If a set of features is successfully matched based on their geometrical configurations, then it indicates a loop closure.
2.3. Path Planning
Path planning is a fundamental capability for autonomous systems, responsible for generating a feasible trajectory from a start to a goal configuration while adhering to various constraints [90]. Effective path planning is critically dependent on the accurate state estimation from a positioning system to know its own location, and a coherent model of the environment from perception sensors to identify obstacles and free space. Path planning algorithms can be broadly classified into global and local planners. Global planners require a complete map to compute an end-to-end path, whereas local planners operate on immediate sensor data. Given that this review focuses on mapless underwater navigation, this section will primarily investigate several mainstream local path planning paradigms [91].
2.3.1. Classical Algorithmic Planners
In this section, we review some classical algorithms for autonomous underwater path planning. Although these foundational methods are now seldom directly used for complex missions, they form the building blocks for modern, sophisticated systems. These algorithms can be conceptually divided into two primary categories. The first are Reactive Methods, which make rapid decisions based on immediate local sensor information. The second are Deliberative Methods, which leverage incrementally-built local maps to conduct a more “far-sighted” search.
Reactive planners are distinguished by their computational efficiency and rapid response to environmental change. In 1990, Khatib [92] introduced the Artificial Potential Field (APF) method, which navigates a vehicle by simulating a force field where the goal exerts an attraction and obstacles exert repulsion. In 1997, Fox et al. [93] proposed the Dynamic Window Approach (DWA), which operates by sampling in the vehicle’s velocity space to select a command that optimally balances goal progress, obstacle clearance, and velocity, while respecting the vehicle’s dynamic constraints. This method has been specifically adapted for AUVs, with recent work focusing on enhancing its robustness to marine conditions. For instance, researchers have redesigned the kinematic model and evaluation function to account for the significant impact of ocean waves and currents [94]. Other improvements include incorporating the relative velocity of dynamic obstacles and introducing new evaluation metrics for energy consumption to improve path quality in complex scenarios [95]. Moreover, in 1998 Fiorini [96] introduced the Velocity Obstacle (VO) method. By defining the set of all robot velocities that would result in a future collision with an obstacle, an avoidance maneuver is then found by selecting a dynamically feasible robot velocity outside of this set.
However, the primary limitation of reactive planners is their “short-sighted” nature, which can cause the vehicle to become trapped in local minima, such as U-shaped obstacles [97]. Deliberative Methods can overcome this limitation by utilizing an incrementally built map from SLAM. These methods are broadly categorized into search-based and sampling-based approaches.
The search-based approaches find optimal paths by exploring a discretized state space. The most foundational algorithm is A*, which utilizes a heuristic function to guide its exploration by expanding nodes based on a cost function. Such function combines the actual cost from the start with the estimated cost to the goal, thereby guaranteeing optimality on a static map [98]. However, the classic A* algorithm requires a complete a priori map, making it unsuitable for unknown environments. Consequently, incremental heuristic variants of A* were developed. The most representative of these include Lifelong Planning A* (LPA*) [99] and D* Lite [100]. The former reuses information from previous searches to efficiently repair the path when edge costs in the graph change, while the latter propagates cost changes backwards from the goal, allowing for efficient replanning as new terrain information is discovered
The sampling-based approaches excel at planning in continuous, high-dimensional spaces, which are common in robotics. The most prominent algorithm in this class is the Rapidly-exploring Random Tree (RRT), which probabilistically explores the state space by incrementally building a tree of reachable states rooted at the starting point [101,102]. In recent years, researchers have proposed numerous variants and improvements to the RRT algorithm to enhance its performance for specific challenges and complex constraints. Table 3 provides a summary of several common and recent RRT variants.
Table 3.
Common and Recent Variants of the RRT Algorithm.
2.3.2. Learning-Based Planners and Hybrid Architectures
In recent years, learning-based planners, particularly those using Deep Reinforcement Learning (DRL), have emerged as a powerful alternative to classical algorithmic approaches. Unlike conventional planners that rely on explicit models and search procedures, DRL-based methods learn a navigation policy through a trial-and-error interaction with the environment [111,112]. The agent is trained to maximize a cumulative reward signal, allowing it to implicitly learn complex behaviors for navigation in dynamic and uncertain conditions. This model-free paradigm is exceptionally well-suited for sophisticated underwater navigation where precise hydrodynamic models are difficult to obtain or the environment is constantly changing.
The mainstream application of DRL for AUV navigation involves training end-to-end policies that generate reactive and adaptive behaviors. Significant research has been conducted in this area over the past few years. For instance, Ma et al. [113] have developed a neural network model-based reinforcement learning controller for 3D path following. Their approach utilizes an actor-model-critic (AMC) architecture where a learned model predicts the AUV’s next state. To tackle environmental disturbances, Wen et al. [114] utilized an ocean current disturbance rejection Proximal Policy Optimization (PPO) algorithm. This method works by incorporating real-time ocean current information into the agent’s state. In another application, Wang et al. [115] proposed a hierarchical DRL framework for enclosing a moving target among multiple obstacles. In their scheme, a high-level planner uses classical methods to generate a safe reference trajectory, and a low-level DRL agent then acts as an adaptive controller to accurately track this trajectory while compensating for the vehicle’s unknown dynamics and disturbances.
2.4. Biomimetic and Bio-Inspired Navigation for Conventional AUVs
Over the past few years, the limitations of conventional AUVs in terms of energy consumption, sensing, and maneuverability have led scientists to seek inspiration directly from the biological systems detailed in Section 3. This effort to imitate biology has diverged into two distinct research pathways. The first, biomimetics, focuses on replicating biological mechanisms in conventional robotic hardware. The second, the bio-hybrid approach, seeks to utilize the living organism itself as a platform [116,117]. In this section, we review the field of biomimetics, as it forms a critical conceptual bridge demonstrating how biological principles can be engineered to enhance the capabilities of conventional AUVs.
In Positioning and Navigation, biomimetics aims to replicate animal’s global navigation abilities. For instance, inspired by the magnetoreception used by salmon and sea turtles, geomagnetic-aided navigation has been developed for AUVs. By correlating onboard magnetometer readings with a global geomagnetic map, the AUV can obtain an absolute position fix to correct INS drift [13]. Similarly, inspired by the sun compass used by many fish, bionic polarization compasses have been developed. These sensors determine heading from the polarization pattern of light, offering a robust alternative to magnetic compasses, especially in polar regions where magnetic declination is unreliable [118].
For Environmental Perception and Modeling, conventional sensors like high-frequency sonar and cameras are limited by energy cost, acoustic noise, and turbidity. Biomimetics offers solutions for close-range, passive, and low-power sensing. The most prominent example is the “synthetic lateral line,” inspired by the fish’s mechanosensory system. By using arrays of micro-pressure or flow sensors, a conventional AUV can passively perceive its surrounding hydrodynamic environment, enabling capabilities such as wake detection, close-proximity station-keeping, and navigation relative to water flow [119,120]. Another approach, inspired by the electroreception of sharks, is the development of weak electric-field sensors to passively detect and discriminate between objects based on their electrical properties, offering a viable perception modality in turbid water [121].
Finally, in Path Planning, biomimetic algorithms have proven effective for complex, dynamic tasks where maps are unavailable. A classic example is chemical plume tracking, inspired by the “odor-gated rheotaxis” strategy used by fish and crabs. This bio-inspired algorithm integrates a chemical sensor with a flow velocity sensor, enabling an AUV to autonomously trace a plume to its source by moving upstream upon signal detection [122]. In addition, metaheuristic algorithms inspired by collective animal behavior are used for global path optimization [123]. Methods such as Ant Colony Optimization (ACO) and Particle Swarm Optimization (PSO), which model the foraging behavior of colonies, are often applied to find optimal AUV paths that balance objectives like path length, energy consumption, and risk [124,125]
2.5. Summary
The field of underwater autonomous navigation continues to evolve with the integration of advanced computational paradigms. Figure 1 provides a schematic of a conventional AUV navigation architecture. To date, efforts in conventional AUV underwater mapless navigation have continued to develop various strategies to implement light-weight designs and to enhance navigation accuracy, robustness, and efficiency.
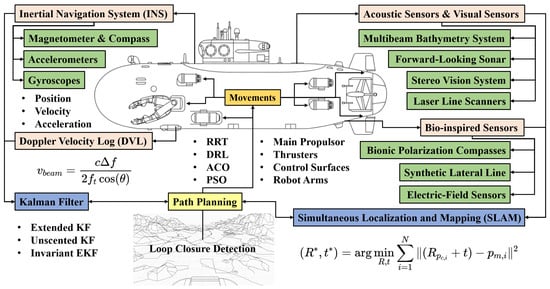
Figure 1.
A review of conventional AUV navigation: The dead reckoning pipeline on the left fuse measurements from the INS and the DVL within a Kalman Filter to estimate the vehicle’s state. The SLAM pipeline on the right utilizes acoustic, visual sensors, and bio-inspired sensors to construct an environmental map. Finally, loop closure detection integrates these two pipelines to correct accumulated drift. The final state estimate is utilized by the path planning module to generate commands for the AUV’s movement and control.
3. A Review of Aquatic Animal Navigation
With the development of modern AUVs, we have gained a significant understanding of the marine environments. However, if we compare these mechanical submersibles with fish, it is obvious to find that in every aspect, whether in terms of operational efficiency, maneuverability, or environmental impact, the performance of fish far exceeds those of mechanical submersibles [126]. Therefore, we propose a novel approach by using live fish as the platform for next generation submersibles [19,127]. In this section, we will first review how aquatic animals, particularly fish, achieve efficient and robust navigation in complex underwater environments. This is necessary for us to achieve mapless autonomous navigation on live fish-based submersible in the future.
3.1. The Sensory Systems
Aquatic animals use various sensory systems to navigate in a complex underwater environment. These sensory systems mainly include vision, lateral line, audition, olfaction, magnetoreception and electroreception.
3.1.1. Visual System
Many fish species utilize sun compass for orientation. This system relies on determining direction from the sun’s position in the sky, while an internal circadian clock compensates for the sun’s movement throughout the day. As early as 1969, Goodyear and Ferguson [128] showed that after mosquitofish were trained to swim in a specific direction, they could successfully maintain that orientation using only the sun as a tool. In another study in 2010, fish were captured on their home reef and released in unfamiliar territory. They consistently oriented in their home direction under clear skies, but this directed movement ceased when the sun was obscured by clouds, demonstrating a direct dependence on the sun as a compass [129]. Furthermore, this navigational skill is not limited to adults. Research has shown that the sun compass is functional even in the earliest life stages of fish. A study on Mediterranean fish larvae navigating in the open ocean found that they also possessed a sun-compass sense, a system for guiding their dispersal and helping them orient in the vast pelagic environment before settling [130].
When the sun’s disk cannot be directly seen due to water depth, turbidity or cloud cover, fish are unable to use sunlight for orientation. However, during the scattering of light by water molecules or clouds, a polarization pattern of light is produced that is visible to many animals, including fish. Although this pattern, defined by the direction of the electric field vector (e vector), is indirect, it has a very stable correspondence with the true position of the sun. Some fish can use it as an indirect navigation compass [131]. This ability has been experimentally verified in studies of coral reef fish. In one study conducted by Berenshtein et al. [132], post-larvae were placed in a circular arena under a polarizer that created an artificial e-vector pattern. The fish consistently oriented their bodies relative to the axis of polarization, proving they could not only detect but also use it for directional orientation.
Moreover, certain fish can also use visual landmarks and the geometry of the surrounding environment for positioning. In 2015, Lee et al. [133] used the zebrafish’s natural shoaling tendency to test its spatial mapping abilities after disorientation. In the test, zebrafish successfully used the shape of an opaque, rectangular tank to reorient themselves. However, such skill disappeared when the tank’s walls were transparent or when the shape was a mere 2D form on the floor, indicating a reliance on 3D boundaries.
3.1.2. Lateral Line System
The lateral line is a mechanosensory system unique to aquatic vertebrates that provides a sense of ’distant touch’ by detecting minute water movements and pressure gradients in their vicinity [134,135]. The system is composed of an array of sensors called neuromasts, distributed over the head and body. These sensors come in two primary forms: superficial neuromasts are exposed on the skin and are highly sensitive to water flow velocity. Canal neuromasts are located inside subdermal canals and respond mainly to pressure gradients and higher-frequency vibrations [136,137,138].
The lateral line system is a mechanosensory system used by aquatic vertebrates for navigation, particularly in underwater environments where vision is limited. Such systems are particularly well-developed in cavefish, as they have long inhabited dark environments. Take the blind Mexican cavefish (Astyanax mexicanus) as an example. The lateral system enables Mexican cavefish to perceive stationary objects by sensing distortions in the flow field created by its own movement, and to locate moving objects by detecting the hydrodynamic disturbances they generate. Beyond object detection, the lateral line is also critical for rheotaxis and close social interactions like schooling since it provides immediate feedback on the position and movement of the neighbors [139,140].
3.1.3. Auditory System
Due to the high speed of sound in water, fish cannot use the binaural effect for sound localization like terrestrial animals do [141]. Instead, fish have evolved a sophisticated mechanism that relies on detecting two distinct components of the sound field: particle motion and sound pressure. Particle motion is the physical, directional oscillation of water molecules caused by the sound wave. Fish detect this directly with their inner ears, which contain dense, bony structures called otoliths. Because these otoliths are much denser than the fish’s body, they lag behind the body’s movement as a sound wave passes, causing a relative shift that stimulates sensory hair cells and provides information about the axis of the sound [142]. However, this particle motion can only tell the fish the line the sound is on, but not whether it is from the front or the back. To solve this, fish use their gas-filled swim bladder, which compresses and expands with the sound’s pressure waves. The brain then compares the phase of the directional signal from the otoliths with the non-directional pressure signal from the swim bladder [143].
3.1.4. Olfactory System
Fish’s olfactory navigation is similar to those on land. When an odor is dispersed in water, it forms a turbulent odor plume. Fish can navigate along this plume using a strategy called odor-gated rheotaxis, where the detection of the odor triggers upstream movement into the current [144]. Moreover, olfactory navigation plays a significant role in fish migration. A study on salmon showed that they rely on a process called olfactory imprinting. Salmon learns the unique chemical signature of their home stream as juveniles before migrating to the sea. As adults, they use this imprinted memory to navigate back to their specific spawning grounds [145,146].
3.1.5. Magnetoreception and Electroreception
Magnetoreception is the ability to perceive the Earth’s magnetic field and use it as a navigational tool, a sense found in many fish species. The magnetic field at any point on Earth can be described by its polarity, inclination angle, and intensity. First, the field’s polarity provides fish with a natural compass, allowing them to maintain a fixed direction. Second, the inclination angle and magnetic intensity form a two-dimensional coordinate system across the Earth’s surface. Because the isolines for these two parameters are non-parallel in most regions, their specific combination can correspond to a unique geographic location, enabling fish to use them for positioning [147,148]. This ability was clearly demonstrated in experiments with juvenile Pacific salmon (Oncorhynchus tshawytscha). When young fish with no prior ocean experience were placed in magnetic fields simulating locations to the south or north of their normal range, they autonomously oriented in the direction that would return them to their population’s central feeding grounds. This provides direct evidence that juvenile Pacific salmon possess an innate magnetic map for navigation [149].
In contrast to magnetoreception, electroreception is relatively common in cartilaginous fishes [150]. Electroreception is mainly divided into passive and active modalities. Passive electroreception is exemplified by sharks and rays, whose heads are covered with specialized gelatinous pore organs called the ampullae of Lorenzini. These receptors detect weak bioelectric fields generated by the muscle contractions or respiration of other organisms, making them highly effective close-range predators [151]. Furthermore, as the animal’s movement through the Earth’s magnetic field will induce a detectable electric field across its body, this system can also aid in orientation. Active electroreception is found in “electric fishes”, which are subdivided into weakly and strongly electric species. Weakly electric fishes, such as the Elephant Nose Fishes of Africa and the knifefishes of South America, typically inhabit turbid waters with poor visibility [152]. An electric organ in their tail generates a continuous, low-voltage electric field, and a network of electroreceptors on their skin detects distortions to this field caused by objects, prey, or conspecifics. This ability, known as electrolocation, enables them to navigate, forage, and engage in complex social communication in complete darkness [153]. Strongly electric fish, such as electric eels, rays, and catfish, mainly use their discharge ability for predation and defense [154].
3.2. Navigational Strategies and Decision-Making
Aquatic animals employ a variety of navigational strategies that can be broadly categorized into long-distance navigation, regional navigation, and close-range navigation.
3.2.1. Long-Distance Navigation
Long-distance navigation involves migrations over hundreds to thousands of kilometers, such as the oceanic migrations of salmon, eels, and tuna. Field studies on specific species have provided insights into the strategies employed during these journeys.
In 1996, a study conducted by Dittman and Quinn [145] demonstrated the importance of olfactory cues in the homing migration of salmon. In these studies, hatchery-reared juvenile coho salmon were exposed to a synthetic chemical, such as morpholine or phenylethyl alcohol, during the critical developmental window of smoltification and then released. Upon their return as adults 1.5 years later, the treated salmon were drawn to unfamiliar streams that had been artificially scented with the specific chemical that they were exposed to as juveniles. This result demonstrated that salmon learn the chemical signature during their juvenile freshwater phase and use it to complete their homing migration in the last stage.
In 2011, a study conducted by Ueda [155] investigated this sensory hierarchy by selectively disrupting senses in mature salmon during their homing migration. The researchers observed that control fish, as well as fish with only their magnetic sense disrupted, successfully homed. However, fish with both visual and magnetic cues blocked became disoriented. This led to the conclusion that visual cues, while perhaps insufficient for long-range homing alone, are crucial for maintaining a consistent directional bearing. The above two studies suggest a system where magnetic and olfactory cues may be crucial for long-range navigation, while visual sensory serves as a critical “compass” for maintaining direction.
3.2.2. Regional Navigation
Regional navigation refers to the movement of fish within the environment they are familiar with, such as a specific reef system, lake, or coastal area.
Between 1981 and 1988, a study tracked five scalloped hammerhead sharks using ultrasonic transmitters near Espiritu Santo Seamount and Las Animas Island in the Gulf of California. Tracking data revealed that the sharks used highly directional, fixed geographic paths when traveling between their daytime schooling sites and nighttime foraging areas. Researchers found that these migrations typically occurred at night, with the sharks swimming at depths between 100 and 450 m, making it highly improbable that vision was their primary navigational sense. Furthermore, a comparison of the sharks’ paths to subsurface irradiance, temperature, current flow, and seafloor topography revealed no significant relationships. However, the study found a highly significant association between the sharks’ movements and the topographic features of the local geomagnetic field. Based on this evidence, the author hypothesized that the sharks navigate using “geomagnetic topotaxis” a mechanism of following features in the magnetic field to guide their movements [156].
In 2003, researchers conducted two field experiments at Lizard Island on the Great Barrier Reef to investigate how auditory cues guide the regional navigation of larval fish. In the first experiment, they built a series of small, artificial patch reefs. Half of them used underwater speakers to broadcast recordings of reef noise, while the other half remained silent. The results showed that the noisy reefs attracted more settling fish than the silent ones, particularly from the apogonid and pomacentrid families. The second experiment investigated the preference of fish for different frequencies of noise. The results showed that while apogonid species had no preference for noise frequency, pomacentrid families were significantly more attracted to the reefs with high-frequency noise [157].
3.2.3. Close-Range Navigation
Close-range navigation refers to the real-time interaction with the environment, such as avoiding obstacles, capturing prey, and maintaining position within a group or in the environment. This interaction typically occurs within a range of a few meters or a few centimeters; hence it mainly relies on high-resolution sensory systems such as lateral line, vision, and active electroreception [158].
In 1971, Aronson [159] conducted an experiment to test the hypothesis that tidepool gobies (Bathygobius soporator) memorize the topography of their surroundings during high tide to navigate when trapped in isolated pools at low tide. This hypothesis was based on the observation that when threatened, these gobies can accurately jump from one tide pool to an adjacent, unseen one to escape. In the experiment, researchers built an artificial tide pool system. They first established a baseline by testing the fish’s jumping accuracy at a “low tide”. The gobies were then allowed to swim freely over the entire area during a “high tide” to acquire spatial information. The results showed that after the high-tide experience, the fish’s jumping success rate increased from 15% to 97%, and their jumps became highly accurate and directed. The study also tested the durability of this topographic memory, finding that gobies retained their learned map and could still jump accurately after being held in a separate tank for up to 40 days [159].
In 1989, a study based on the blind cave fish (Astyanax mexicanus) demonstrated that these animals build an internal “cognitive map” through exploratory behavior for spatial orientation. Researchers found that when placed in an unfamiliar environment, the fish increase their swimming speed and follow along boundaries to optimize sensory input from their lateral line system. The study also revealed that the formation of this cognitive map involves a consolidation process from short-term to long-term memory. Furthermore, researchers have found that when a single object was added to or removed from the tank, the fish will reexplore the entire environment. This suggests the fish has maintained a complete spatial map rather than simply remembering the locations of the individual objects [160].
3.3. Summary
In summary, this section has reviewed the diverse and sophisticated navigational capabilities of aquatic animals. Figure 2 provides a brief overview of the various types of navigation tools and strategies employed by aquatic animals. However, the utility of these biological solutions is defined by survival (e.g., finding food, mating, avoiding predators). A key premise of bio-hybrid robotics is that this survival utility can be co-opted for engineering utility. For example, the lateral line’s ability to sense a predator can be repurposed to track the hydrodynamic signature of a target vessel. Section 4 explores the interface technologies designed to bridge this gap.
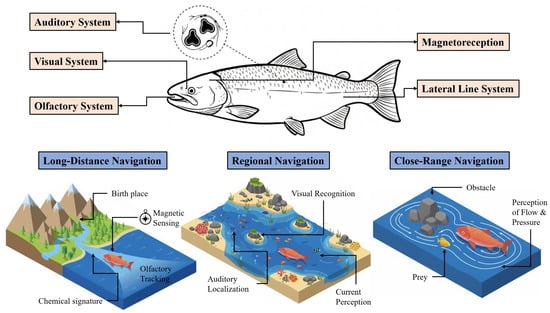
Figure 2.
A review of aquatic animal navigation: The top panel illustrates the primary sensory modalities in a fish. The bottom panel demonstrates how these senses are typically employed across three scales: long-distance navigation such as migration mainly relies on magnetoreception and olfactory tracking; regional navigation usually utilizes visual and auditory cues; and close-range navigation like obstacle avoidance and prey detection primarily depends on the visual and lateral line system.
4. Aquatic Animal Navigation Control via Brain-Computer Interface
As mentioned, leveraging live fish as a platform for next-generation submersibles offers unparalleled advantages in efficiency and maneuverability [19,127]. However, this novel approach presents a challenge that distinguishes it from any conventional AUV. In this section, we provide a comprehensive review of the evolving strategies for BCI control of aquatic animals. Moreover, we categorize the human-animal control hierarchy into three distinct stages based on the level of utilization of living organisms as illustrated in Figure 3.
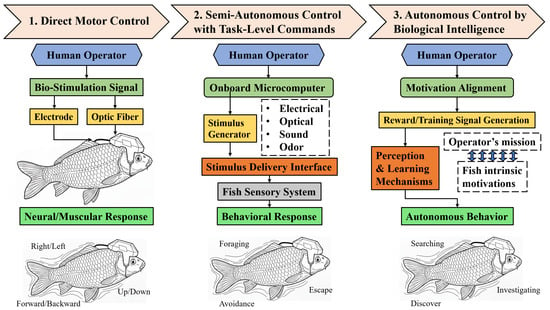
Figure 3.
Three-stage hierarchy for Brain-Computer Interface control of bio-hybrid animals: Direct Motor Control treats the animal as a biological actuator by using direct stimulation to command basic movements; Semi-Autonomous Control guides the animal’s natural behaviors through computer-translated sensory stimuli based on high-level operator commands; Autonomous Control by Biological Intelligence achieves full autonomy by aligning the operator’s mission with the animal’s intrinsic motivations.
4.1. Direct Motor Control
Direct Motor Control is a basic control strategy for bio-hybrid robots. The key is to treat the organism as a biological actuator driven by external signals [18]. By utilizing interfaces such as implanted electrodes, this method applies stimuli directly to the animal’s nervous or muscular system to override its native motor intent and command specific actions [161,162]. Based on the position of the stimulations, this control strategy can be divided into two primary categories.
4.1.1. Peripheral Nerve/Muscle Direct Activation
This method bypasses the animal’s central decision-making processes. Instead, it applies stimulation directly to peripheral nerve trunks or effector muscles to cause contractions and generate movement. Such method was applied early on to many terrestrial and aerial animals, particularly invertebrates due to their relatively simple neuromuscular systems [19]. Classical examples include the control of cockroaches [163,164], beetles [165,166], and moths [167]. However, for vertebrates such as fish, even a simple turning behavior requires the coordination of many muscles throughout the body. Therefore, achieving coherent motor behavior by applying precise external electrical signals to the peripheral motor nervous system or muscles is considered almost impossible [168].
4.1.2. Central Nervous System Control
This approach directly targets motor control centers within the central nervous system (CNS), such as the primary motor cortex or motor neuron clusters in the spinal cord. These central regions have a direct mapping to peripheral muscle groups. By applying electrical or optogenetic stimulation, specific neurons are forced to depolarize and generate action potentials. These signals then propagate along descending pathways to contract target muscles, resulting in physical movements. This concept was proposed early on and has been successfully applied to various terrestrial animals, including cats [169,170], rats [171,172], and monkeys [173]. Similar explorations have also been conducted in aquatic organisms.
In 1999, a neuromechanical model of the lamprey was developed to simulate how varying brainstem inputs to the spinal network could generate swimming patterns, including forward motion and turns [174]. In 2000, experimental validation for such control was provided when Sirota et al. [175] demonstrated that direct electrical microstimulation of the mesencephalic locomotor region (MLR) in semi-intact lampreys elicits well-coordinated swimming, the power of which could be controlled by the stimulation parameters. In 2009, Arrenberg et al. [176] achieved a more refined level of control in zebrafish larvae using optogenetics, where light was used to activate neurons with Channelrhodopsin-2 (ChR2) to trigger locomotion or silence them with halorhodopsin (NpHR) to inhibit movement. In the same year, Kobayashi et al. [177] confirmed the role of the nucleus of the medial longitudinal fasciculus (Nflm) as a swimming center in goldfish by using a wirelessly controlled microstimulator to artificially induce forward and turning movements. In 2020, research using wireless recording systems identified specialized neurons in the lateral pallium of freely navigating goldfish that encode environmental edges, head direction, and swimming speed [178].
Despite these achievements, Direct Motor Control faces significant limitations [179]. First, our understanding of the brain’s motor regions is not complete. In most organisms, these regions do not have clear boundaries like classical engineering systems, which makes it impossible to achieve the same precise and repeatable control as conventional submersibles. Second, this approach ignores the animal’s free will, treating it as a novel form of “hardware” by using its musculoskeletal system and basic reflex pathways [127]. For these two reasons, this level of control is classified as the first and simplest stage. Fish, evolved over millions of years, possess sensory and navigational capabilities far exceeding those of any submersibles. If we can fully leverage these innate abilities, then the navigation, rapidity, mobility, and efficiency of the next-generation bio-hybrid platforms can be significantly enhanced [127].
4.2. Semi-Autonomous Control with Task-Level Commands
We classify the second stage of biological control as Semi-Autonomous Control with Task-Level Commands. In this paradigm, the human operator does not micro-manage every movement. Instead, they provide high-level, task-oriented commands. An onboard microcomputer then translates these abstract commands into a sequence of simple, indirect stimuli, providing the animal with a virtual sensation. This approach guides the animal by leveraging its own natural behaviors, such as escape responses, foraging, or migration. A significant difference from the first stage is that this method effectively utilizes the fish’s innate navigational capabilities, rather than merely stimulating mechanical forward, backward, or turning movements [168].
In 2009, Kajiura and Fitzgerald [180] explored the response of juvenile scalloped hammerhead sharks to electric fields that simulate their prey. By creating a dipole electric field with electrodes, researchers showed that sharks would orient and move towards the active stimulus. The study found that the sharks’ response distance increased with both larger dipole sizes and stronger electric currents, establishing a foundational method for guiding sharks by manipulating their natural electroreceptive sensors and foraging behaviors. In 2013, Lee et al. [181] developed a system to remotely guide untrained turtles by leveraging their instinct for obstacle avoidance. Researchers mounted a device on the turtle’s shell that could selectively block its field of view. By positioning this virtual obstacle, they could reliably induce the turtle to turn away from it. In 2016, this concept was integrated with a human Brain-Computer Interface (BCI), allowing a human operator to remotely navigate a turtle by controlling its instinctive escape behavior [182]. In 2017, a “parasitic robot” system was designed to achieve waypoint navigation in turtles through operant conditioning [183]. The device trained the turtle to follow visual cues from a heads-up LED display by rewarding correct movements with food from a feeder, enabling the system to achieve autonomous navigation between pre-defined waypoints.
A significant challenge in this paradigm, however, is balancing stimulus effectiveness against the need for minimal invasiveness and aversiveness. For long-term compliance, the stimulus must be salient enough to guide behavior, yet not cause undue stress, physical harm, or rapid habituation, which would render the control ineffective [184]. In constructing a framework for such stimuli, ethical considerations, particularly the principles of the 3Rs (Replacement, Reduction, and Refinement), are paramount [185]. Current approaches attempt to apply these principles, primarily through Refinement and Reduction. For instance, adaptive systems using reinforcement learning can model animal behavior, providing a foundational step to learn an individual’s sensitivity threshold [186]. Concurrently, conditioning methods like active avoidance reduce the overall use of aversive stimuli by training the fish to associate them with a warning signal [187]. Nevertheless, ensuring animal welfare while maintaining reliable, long-duration control remains an unsolved problem, necessitating new research into non-aversive guidance cues and adaptive stimulation algorithms.
4.3. Autonomous Control by Biological Intelligence
The third and most advanced stage of control is Autonomous Control by Biological Intelligence. The core of this paradigm is to fully leverage the fish’s own navigational and sensory capabilities. This is achieved through “motivation alignment”, a strategy that aligns the animal’s intrinsic motivations with the operator’s mission objectives. The animal is no longer simply guided; it is motivated to perform the task autonomously [168,184].
Under this framework, control can be achieved in two main ways: by utilizing a fish’s existing natural behaviors, or by using training to make it actively sensitive to specific signals of interest. This idea has long been validated in higher animals. Classic examples include bomb-sniffing dogs [188], dolphins and sea lions conducting underwater searches for the U.S. Navy [189], and APOPO’s mine-detecting rats [190,191]. However, transposing this system to fish requires designing specific training protocols tailored to aquatic learning and memory mechanisms. However, implementing such a system in fish presents unique challenges. A reliable motivation alignment between the animal and the operator requires a deep ethological understanding to design tasks that leverage natural behaviors [192,193]. Moreover, while operant conditioning is proven in laboratory settings, there is no guarantee that a learned behavior will generalize to novel, uncontrolled environments.
Recent research has established the fundamental learning capabilities in zebrafish. In 2007, Xu et al. [187] demonstrated active avoidance conditioning in zebrafish using a shuttlebox apparatus. Through this training, the zebrafish learned to swim to the darker compartment to avoid an electrical shock. In 2009, another study showed that zebrafish could be classically conditioned to associate a specific odorant with a food reward [194]. Similar research has also been conducted on goldfish. In 1993, Zippel et al. [195] demonstrated that goldfish could be trained to tell the difference between various chemosensory stimuli, including different amino acids. In 2022, the goal-oriented navigational capabilities of fish were showcased in a study where goldfish learned to operate a terrestrial vehicle [196]. The “Fish Operated Vehicle” would move in response to the fish’s position and orientation within its onboard water tank. The goldfish successfully learned to “drive” the vehicle towards a visual target in an unfamiliar room to receive a food reward. This experiment suggests that a fish’s internal sense of direction and navigational abilities are flexible and can be adapted to complex, goal-oriented tasks, which is a key prerequisite for autonomous control.
5. Conclusions, Existing Challenges and Future Trends
This review has provided a comprehensive analysis of mapless autonomous underwater navigation, bridging the gap between robotic techniques and the emerging field of fourth-generation submersible based on live fish. We began by surveying the established technologies employed in conventional AUVs, including Dead Reckoning through INS/DVL and environmental mapping via SLAM. These methods have laid a solid foundation but often struggle with the energy inefficiency, poor acoustic stealth, and limited adaptability in purely mechanical systems. In contrast, by drawing inspiration from aquatic animals, this review explored the potential of using live fish as next-generation submersible platforms. We examined the sensory and navigational strategies that have evolved in fish and subsequently detailed a three-stage hierarchy for their control.
Despite the promising potential of bio-hybrid systems, significant challenges remain. First and foremost are the ethical considerations for using living organisms, which demand the development of humane interfacing and control techniques. Technical issues include creating precise and stable implants that can operate long-term underwater. Providing continuous power supply is also a major issue, as current batteries are insufficient for long-duration missions. Finally, the natural variability and free will of living animals make their behavior less predictable than robots, which complicates reliable control.
Furthermore, it is valid to question why one might pursue complex bio-hybrid control rather than focusing on integrating advanced, bio-inspired sensors onto conventional AUV platforms. Both research aspects are valuable. The biomimetic approach seeks to enhance the capabilities of established mechanical systems, which is crucial for many existing applications. The bio-hybrid approach, in contrast, represents a more fundamental paradigm shift. It aims to address inherent limitations of machinery that biomimetic sensors alone cannot solve. Specifically, bio-hybrids demonstrate significant energy endurance by leveraging biological metabolism and foraging, which can potentially extend mission durations from days to months. They also exhibit excellent maneuverability and hydrodynamic performance, making them well-suited for navigating complex, fluid environments. Moreover, they achieve superior acoustic stealth through silent, flexible propulsion and natural biological camouflage, which outperforms the stealth capabilities of mechanical systems. This positions the bio-hybrid concept as a distinct pathway for next-generation underwater operations.
Future directions for this field include augmenting fish with external sensors. This system could enhance navigation in complex environments by gathering environmental data while also monitoring the fish’s own vital signs and sensory inputs. Integrating an onboard AI chip could enable adaptive, closed-loop control. In dynamic underwater environments, the artificial intelligence could analyze real-time data to learn and adjust control strategies, allowing the system to adapt to changing conditions. Moreover, this could lead to the development of bio-hybrid swarms, analogous to terrestrial drone systems. For a single mission, such a system could deploy multiple fish, using internal task allocation and adjustment to achieve more efficient, robust, and large-scale exploration.
Funding
This research was supported by the National Key Research and Development Program (Grant No. 2022YFC2805200).
Data Availability Statement
No new data were created or analyzed in this study. Data sharing is not applicable to this article.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Leonardo da Vinci’s Inventions. Self-Propelled Cart. Available online: https://www.da-vinci-inventions.com/self-propelled-cart (accessed on 17 September 2025).
- Moravec, H.P. The Stanford Cart and the CMU Rover. Proc. IEEE 1983, 71, 872–884. [Google Scholar] [CrossRef]
- Srinivas, P.; Gudla, R.; Telidevulapalli, V.; Kota, J.; Mandha, G. Review on Self-Driving Cars Using Neural Network Architectures. World J. Adv. Res. Rev. 2022, 16, 736–746. [Google Scholar] [CrossRef]
- Tsugawa, S. Vision-based vehicles in Japan: Machine vision systems and driving control systems. IEEE Trans. Ind. Electron. 1994, 41, 398–405. [Google Scholar] [CrossRef]
- Pomerleau, D.A. ALVINN: An autonomous land vehicle in a neural network. In Proceedings of the 2nd International Conference on Neural Information Processing Systems, Denver, CO, USA, 1 January 1988; MIT Press: Cambridge, MA, USA, 1988; pp. 305–313. [Google Scholar]
- Thorpe, C.; Hebert, M.; Kanade, T.; Shafer, S. Vision and Navigation for the Carnegie-Mellon Navlab. Annu. Rev. Comput. Sci. 1987, 2, 521–556. [Google Scholar] [CrossRef]
- Dickmanns, E.D.; Zapp, A. Autonomous High Speed Road Vehicle Guidance by Computer Vision. IFAC Proc. Vol. 1987, 20, 221–226. [Google Scholar] [CrossRef]
- Dickmanns, E.D. Dynamic Vision for Perception and Control of Motion; Springer: London, UK, 2007; ISBN 978-1-84628-637-7. [Google Scholar]
- Scales, H. The Deep Sea. In The Ocean and Us; Obaidullah, F., Ed.; Springer International Publishing: Cham, Switzerland, 2023; pp. 163–173. ISBN 978-3-031-10812-9. [Google Scholar]
- Wölfl, A.-C.; Snaith, H.; Amirebrahimi, S.; Devey, C.W.; Dorschel, B.; Ferrini, V.; Huvenne, V.A.I.; Jakobsson, M.; Jencks, J.; Johnston, G.; et al. Seafloor Mapping—The Challenge of a Truly Global Ocean Bathymetry. Front. Mar. Sci. 2019, 6, 283. [Google Scholar] [CrossRef]
- The Rise of Ocean Robots. Nat. Geosci. 2020, 13, 393. [CrossRef]
- Wynn, R.B.; Huvenne, V.A.I.; Le Bas, T.P.; Murton, B.J.; Connelly, D.P.; Bett, B.J.; Ruhl, H.A.; Morris, K.J.; Peakall, J.; Parsons, D.R.; et al. Autonomous Underwater Vehicles (AUVs): Their Past, Present and Future Contributions to the Advancement of Marine Geoscience. Mar. Geol. 2014, 352, 451–468. [Google Scholar] [CrossRef]
- Paull, L.; Saeedi, S.; Seto, M.; Li, H. AUV Navigation and Localization: A Review. IEEE J. Ocean. Eng. 2014, 39, 131–149. [Google Scholar] [CrossRef]
- Li, Z.; Li, W.; Sun, K.; Fan, D.; Cui, W. Recent Progress on Underwater Wireless Communication Methods and Applications. J. Mar. Sci. Eng. 2025, 13, 1505. [Google Scholar] [CrossRef]
- Li, Z.; Chitre, M.; Stojanovic, M. Underwater acoustic communications. Nat. Rev. Electr. Eng. 2025, 2, 83–95. [Google Scholar] [CrossRef]
- Huang, G. Visual-Inertial Navigation: A Concise Review. arXiv 2019, arXiv:1906.02650. [Google Scholar] [CrossRef]
- Durrant-Whyte, H.; Bailey, T. Simultaneous Localization and Mapping: Part I. IEEE Robot. Autom. Mag. 2006, 13, 99–110. [Google Scholar] [CrossRef]
- Webster-Wood, V.A.; Guix, M.; Xu, N.W.; Behkam, B.; Sato, H.; Sarkar, D.; Sanchez, S.; Shimizu, M.; Parker, K.K. Biohybrid robots: Recent progress, challenges, and perspectives. Bioinspir. Biomim. 2022, 18, 015001. [Google Scholar] [CrossRef] [PubMed]
- Shao, X.; Yang, J.; Sawan, M.; Cui, W. Bridging Biology and Robotics: Advancing Submersible Technology from Robotic to Live-Fish Models. Acad. Eng. 2025, 2, 1–14. [Google Scholar] [CrossRef]
- Ko, H.; Lauder, G.; Nagpal, R. The Role of Hydrodynamics in Collective Motions of Fish Schools and Bioinspired Underwater Robots. J. R. Soc. Interface 2023, 20, 20230357. [Google Scholar] [CrossRef] [PubMed]
- Budiyono, A. Principles of GNSS, Inertial, and Multi-sensor Integrated Navigation Systems. Ind. Robot. Int. J. 2012, 39, 97–118. [Google Scholar] [CrossRef]
- Cheng, J.; Wang, X.; Cheng, X.; Hao, Y. Research and Design of PINS Simulator Based on Underwater Vehicle Space Model. In Proceedings of the 2009 Second International Workshop on Knowledge Discovery and Data Mining, Moscow, Russia, 23–25 January 2009; pp. 917–920. [Google Scholar]
- Stutters, L.; Liu, H.; Tiltman, C.; Brown, D.J. Navigation Technologies for Autonomous Underwater Vehicles. IEEE Trans. Syst. Man Cybern. Part C Appl. Rev. 2008, 38, 581–589. [Google Scholar] [CrossRef]
- Tazartes, D. Inertial Navigation: From Gimbaled Platforms to Strapdown Sensors. IEEE Trans. Aerosp. Electron. Syst. 2011, 47, 2292–2299. [Google Scholar] [CrossRef]
- Titterton, D.; Weston, J. Strapdown Inertial Navigation Technology, 2nd ed.; The Institution of Engineering and Technology: Stevenage, UK, 2004. [Google Scholar]
- Titterton, D.; Weston, J. Strapdown Inertial Navigation Technology—2nd Edition—[Book Review]. IEEE Aerosp. Electron. Syst. Mag. 2005, 20, 33–34. [Google Scholar] [CrossRef]
- Bao, J.; Li, D.; Qiao, X.; Rauschenbach, T. Integrated Navigation for Autonomous Underwater Vehicles in Aquaculture: A Review. Inf. Process. Agric. 2020, 7, 139–151. [Google Scholar] [CrossRef]
- Tian, Y.-P.; Yang, X.-J.; Guo, Y.-Z.; Liu, F. Filtering and analysis on the random drift of FOG. In AOPC 2015: Optical Fiber Sensors and Applications; Liao, Y., Zhang, W., Jiang, D., Wang, W., Brambilla, G., Eds.; SPIE: Beijing, China, 2015; p. 96790J. [Google Scholar] [CrossRef]
- Zhang, H.; Cai, Y.; Yue, J.; Mu, W.; Zhou, S.; Jin, D.; Xu, L. Integrated Navigation Algorithm for Autonomous Underwater Vehicle Based on Linear Kalman Filter, Thrust Model, and Propeller Tachometer. J. Mar. Sci. Eng. 2025, 13, 303. [Google Scholar] [CrossRef]
- Snyder, J. Doppler Velocity Log (DVL) Navigation for Observation-Class ROVs. In Proceedings of the OCEANS 2010 MTS/IEEE SEATTLE, Seattle, WA, USA, 20–23 September 2010; pp. 1–9. [Google Scholar]
- McCue, L. Handbook of Marine Craft Hydrodynamics and Motion Control. IEEE Control. Syst. Mag. 2016, 36, 78–79. [Google Scholar] [CrossRef]
- Li, J.; Gu, M.; Zhu, T.; Wang, Z.; Zhang, Z.; Han, G. Research on Error Correction Technology in Underwater SINS/DVL Integrated Positioning and Navigation. Sensors 2023, 23, 4700. [Google Scholar] [CrossRef] [PubMed]
- Vickery, K. Acoustic positioning systems. A practical overview of current systems. In Proceedings of the 1998 Workshop on Autonomous Underwater Vehicles, Cambridge, MA, USA, 20–21 August 1998; pp. 5–17. [Google Scholar] [CrossRef]
- Lurton, X. An Introduction to Underwater Acoustics: Principles and Applications, 2nd ed.; Springer: Berlin/Heidelberg, Germany, 2010; ISBN 978-3-540-78480-7. [Google Scholar]
- Miller, P.; Farrell, J.; Zhao, Y.; Djapic, V. Autonomous Underwater Vehicle Navigation. IEEE J. Ocean. Eng. 2010, 35, 663–678. [Google Scholar] [CrossRef]
- Pan, X.; Wu, Y. Underwater Doppler Navigation with Self-Calibration. J. Navig. 2016, 69, 295–312. [Google Scholar] [CrossRef]
- Gilcoto, M.; Jones, E.; Fariña-Busto, L. Robust Estimations of Current Velocities with Four-Beam Broadband ADCPs. J. Atmos. Ocean. Technol. 2009, 26, 2777–2788. [Google Scholar] [CrossRef]
- Zhou, B.; Tong, H.; Zhang, B.; Xu, W. Development of Eight-Beam Phased Array Transducer. J. Vib. Shock. 2022, 41, 217–222. [Google Scholar]
- Liu, J.; Insana, M.F. Coded Pulse Excitation for Ultrasonic Strain Imaging. IEEE Trans. Ultrason. Ferroelectr. Freq. Control. 2005, 52, 231–240. [Google Scholar] [CrossRef]
- Li, H.; Sun, D.; Cao, Z.; Rui, C.; Cheng, M. Precision Evaluation in Velocity Estimation for Broadband Doppler Sonar. Measurement 2025, 256, 118140. [Google Scholar] [CrossRef]
- Lavery, A.C.; Bassett, C.; Lawson, G.L.; Jech, J.M. Exploiting Signal Processing Approaches for Broadband Echosounders. ICES J. Mar. Sci. 2017, 74, 2262–2275. [Google Scholar] [CrossRef]
- Burdyny, M.; Poroy, O.; Spain, P.; Lopez, G. Phased Array Velocity Sensor Operational Advantages and Data Analysis. In Proceedings of the OCEANS’11 MTS/IEEE KONA, Waikoloa, HI, USA, 19–22 September 2011; pp. 1–8. [Google Scholar]
- Martynyuk, A.P.; Kazakova, E.V. On the Acoustic Doppler Log Error with a Phased Array Antenna. Gyroscopy Navig. 2011, 2, 39–45. [Google Scholar] [CrossRef]
- Yang, H.; Gao, X.; Huang, H.; Li, B.; Jiang, J. A Tightly Integrated Navigation Method of SINS, DVL, and PS Based on RIMM in the Complex Underwater Environment. Sensors 2022, 22, 9479. [Google Scholar] [CrossRef]
- Wei, Z.; Guo, W.; Lan, Y.; Liu, B.; Sun, Y.; Gao, S. Data-Driven Cooperative Localization Algorithm for Deep-Sea Landing Vehicles Under Track Slippage. Remote Sens. 2025, 17, 755. [Google Scholar] [CrossRef]
- Zhang, F.; Zhao, S.; Li, L.; Cao, C. Underwater DVL Optimization Network (UDON): A Learning-Based DVL Velocity Optimizing Method for Underwater Navigation. Drones 2025, 9, 56. [Google Scholar] [CrossRef]
- Klein, I.; Gutnik, Y.; Lipman, Y. Estimating DVL Velocity in Complete Beam Measurement Outage Scenarios. IEEE Sens. J. 2022, 22, 20730–20737. [Google Scholar] [CrossRef]
- Liu, M.; Gao, Y.; Li, G.; Guang, X.; Li, S. An Improved Alignment Method for the Strapdown Inertial Navigation System (SINS). Sensors 2016, 16, 621. [Google Scholar] [CrossRef] [PubMed]
- Kalman, R.E. A New Approach to Linear Filtering and Prediction Problems. Trans. ASME–J. Basic Eng. 1960, 82, 35–45. [Google Scholar] [CrossRef]
- Schmidt, S.F. Application of State-Space Methods to Navigation Problems. In Advances in Control Systems; Leondes, C.T., Ed.; Elsevier: Amsterdam, The Netherlands, 1966; Volume 3, pp. 293–340. [Google Scholar]
- Lv, P.-F.; Guo, J.; Lv, J.-Y.; He, B. Integrated Navigation Based on HG-RNN and EKF for Autonomous Underwater Vehicle. In Proceedings of the OCEANS 2024—Singapore, Singapore, 15–18 April 2024; pp. 1–5. [Google Scholar]
- Julier, S.J.; Uhlmann, J.K. New extension of the Kalman filter to nonlinear systems. In Signal Processing, Sensor Fusion, and Target Recognition VI; SPIE: Bellingham, WA, USA, 1997; Volume 3068. [Google Scholar] [CrossRef]
- Allotta, B.; Caiti, A.; Chisci, L.; Costanzi, R.; Di Corato, F.; Fantacci, C.; Fenucci, D.; Meli, E.; Ridolfi, A. An Unscented Kalman Filter Based Navigation Algorithm for Autonomous Underwater Vehicles. Mechatronics 2016, 39, 185–195. [Google Scholar] [CrossRef]
- Gordon, N.J.; Salmond, D.J.; Smith, A.F.M. Novel Approach to Nonlinear/Non-Gaussian Bayesian State Estimation. IEE Proc. F Radar Signal Process. 1993, 140, 107–113. [Google Scholar] [CrossRef]
- Menna, B.V.; Villar, S.A.; Acosta, G.G. Particle Filter Based Autonomous Underwater Vehicle Navigation System Aided Thru Acoustic Communication Ranging. In Proceedings of the Global Oceans 2020: Singapore—U.S. Gulf Coast, Biloxi, MS, USA, 5–30 October 2020; pp. 1–10. [Google Scholar]
- Barrau, A.; Bonnabel, S. The Invariant Extended Kalman Filter as a Stable Observer. IEEE Trans. Autom. Control. 2017, 62, 1797–1812. [Google Scholar] [CrossRef]
- Liu, C.; Wang, G.; Guan, X.; Huang, C. Robust m-Estimation-Based Maximum Correntropy Kalman Filter. ISA Trans. 2023, 136, 198–209. [Google Scholar] [CrossRef]
- Simon, D. Optimal State Estimation: Kalman, H Infinity, and Nonlinear Approaches; Wiley: Hoboken, NJ, USA, 2006; ISBN 978-0-471-70858-2. [Google Scholar]
- Rocha, K.D.T.; Terra, M.H. Robust Kalman Filter for Systems Subject to Parametric Uncertainties. Syst. Control. Lett. 2021, 157, 105034. [Google Scholar] [CrossRef]
- Webster, S.E.; Eustice, R.M.; Singh, H.; Whitcomb, L.L. Advances in Single-Beacon One-Way-Travel-Time Acoustic Navigation for Underwater Vehicles. Int. J. Robot. Res. 2012, 31, 935–950. [Google Scholar] [CrossRef]
- Bailey, T.; Durrant-Whyte, H. Simultaneous Localization and Mapping (SLAM): Part II. IEEE Robot. Autom. Mag. 2006, 13, 108–117. [Google Scholar] [CrossRef]
- Urick, R.J. Principles of Underwater Sound; McGraw-Hill: New York, NY, USA, 1983; ISBN 9780070660878. [Google Scholar]
- Guth, F.; Silveira, L.; Botelho, S.; Drews-Jr, P.; Ballester, P. Underwater SLAM: Challenges, State of the Art, Algorithms and a New Biologically-Inspired Approach. In Proceedings of the IEEE RAS and EMBS International Conference on Biomedical Robotics and Biomechatronics, Sao Paulo, Brazil, 12–15 August 2014; pp. 981–986. [Google Scholar]
- Hammerstad, E.; Asheim, S.; Nilsen, K.; Bodholt, H. Advances in multibeam echo sounder technology. In Proceedings of the OCEANS ‘93, Victoria, BC, Canada, 18–21 October 1993; Volume 1, pp. I482–I487. [Google Scholar] [CrossRef]
- Pinto, M.A.; Lyonnet, B.; Simian, T.; Meltzheim, S. A New High Resolution AUV-Based Synthetic Aperture Sonar for Challenging Environmental Conditions. In Proceedings of the OCEANS 2023—MTS/IEEE U.S. Gulf Coast, Biloxi, MS, USA, 25–28 September 2023; pp. 1–5. [Google Scholar]
- Fernandez, J.E.; Matthews, A.D.; Cook, D.A.; Stroud, J.S. Synthetic Aperture Sonar Development for Autonomous Underwater Vehicles. In Proceedings of the Oceans ‘04 MTS/IEEE Techno-Ocean ‘04, Kobe, Japan, 9–12 November 2004; Volume 4, pp. 1927–1933. [Google Scholar]
- Wang, L.; Bellettini, A.; Hollett, R.; Tesei, A.; Pinto, M.; Chapman, S.; Gade, K. InSAS’00: Interferometric SAS and INS aided SAS imaging. In Proceedings of the MTS/IEEE Oceans 2001. An Ocean Odyssey. Conference Proceedings (IEEE Cat. No.01CH37295), Honolulu, HI, USA, 5–8 November 2001; Volume 1, pp. 179–187. [Google Scholar] [CrossRef]
- Zhang, T.; Liu, S.; He, X.; Huang, H.; Hao, K. Underwater Target Tracking Using Forward-Looking Sonar for Autonomous Underwater Vehicles. Sensors 2020, 20, 102. [Google Scholar] [CrossRef]
- Vargas, E.; Scona, R.; Willners, J.S.; Luczynski, T.; Cao, Y.; Wang, S.; Petillot, Y.R. Robust Underwater Visual SLAM Fusing Acoustic Sensing. In Proceedings of the 2021 IEEE International Conference on Robotics and Automation (ICRA), Xi’an, China, 30 May–5 June 2021; pp. 2140–2146. [Google Scholar]
- Zhang, S.; Zhao, S.; An, D.; Liu, J.; Wang, H.; Feng, Y.; Li, D.; Zhao, R. Visual SLAM for Underwater Vehicles: A Survey. Comput. Sci. Rev. 2022, 46, 100510. [Google Scholar] [CrossRef]
- Li, X.; Shen, Y.; Lu, J.; Jiang, Q.; Xie, O.; Yang, Y.; Zhu, Q. DyStSLAM: An efficient stereo vision SLAM system in dynamic environment. Meas. Sci. Technol. 2022, 34, 025105. [Google Scholar] [CrossRef]
- Jia, Z.; Ma, Y.; Lai, J.; Wang, Z. DOA-SLAM: An Efficient Stereo Visual SLAM System in Dynamic Environment. Int. J. Control. Autom. Syst. 2025, 23, 1181–1198. [Google Scholar] [CrossRef]
- Davison, A.J.; Reid, I.D.; Molton, N.D.; Stasse, O. MonoSLAM: Real-Time Single Camera SLAM. IEEE Trans. Pattern Anal. Mach. Intell. 2007, 29, 1052–1067. [Google Scholar] [CrossRef]
- Grimaldi, M.; Nakath, D.; She, M.; Köser, K. Investigation of the Challenges of Underwater-Visual-Monocular-SLAM. arXiv 2023, arXiv:2306.08738. [Google Scholar] [CrossRef]
- Kohlbrecher, S.; von Stryk, O.; Meyer, J.; Klingauf, U. A Flexible and Scalable SLAM System with Full 3D Motion Estimation. In Proceedings of the 2011 IEEE International Symposium on Safety, Security, and Rescue Robotics, Kyoto, Japan, 1–5 November 2011; pp. 155–160. [Google Scholar]
- Grisetti, G.; Stachniss, C.; Burgard, W. Improved Techniques for Grid Mapping with Rao-Blackwellized Particle Filters. IEEE Trans. Robot. 2007, 23, 34–46. [Google Scholar] [CrossRef]
- Palomer, A.; Ridao, P.; Youakim, D.; Ribas, D.; Forest, J.; Petillot, Y. 3D Laser Scanner for Underwater Manipulation. Sensors 2018, 18, 1086. [Google Scholar] [CrossRef]
- Hess, W.; Kohler, D.; Rapp, H.; Andor, D. Real-time loop closure in 2D LIDAR SLAM. In Proceedings of the 2016 IEEE International Conference on Robotics and Automation (ICRA), Stockholm, Sweden, 16–21 May 2016; pp. 1271–1278. [Google Scholar] [CrossRef]
- Gutmann, J.-S.; Konolige, K. Incremental Mapping of Large Cyclic Environments. In Proceedings of the Proceedings 1999 IEEE International Symposium on Computational Intelligence in Robotics and Automation. CIRA’99 (Cat. no.99EX375), Monterey, CA, USA, 8–9 November 1999; pp. 318–325. [Google Scholar]
- Lu, F.; Milios, E. Globally Consistent Range Scan Alignment for Environment Mapping. Auton. Robot. 1997, 4, 333–349. [Google Scholar] [CrossRef]
- Mur-Artal, R.; Montiel, J.M.M.; Tardós, J.D. ORB-SLAM: A Versatile and Accurate Monocular SLAM System. IEEE Trans. Robot. 2015, 31, 1147–1163. [Google Scholar] [CrossRef]
- Dellaert, F.; Kaess, M. Factor Graphs for Robot Perception. Found. Trends Robot. 2017, 6, 1–139. [Google Scholar] [CrossRef]
- Kaess, M.; Ranganathan, A.; Dellaert, F. iSAM: Incremental Smoothing and Mapping. IEEE Trans. Robot. 2008, 24, 1365–1378. [Google Scholar] [CrossRef]
- Lowe, D.G. Distinctive Image Features from Scale-Invariant Keypoints. Int. J. Comput. Vis. 2004, 60, 91–110. [Google Scholar] [CrossRef]
- Bay, H.; Ess, A.; Tuytelaars, T.; Van Gool, L. Speeded-up Robust Features (SURF). Comput. Vis. Image Underst. 2008, 110, 346–359. [Google Scholar] [CrossRef]
- Rublee, E.; Rabaud, V.; Konolige, K.; Bradski, G. ORB: An Efficient Alternative to SIFT or SURF. In Proceedings of the 2011 International Conference on Computer Vision, Barcelona, Spain, 6–13 November 2011; pp. 2564–2571. [Google Scholar]
- Heshmat, M.; Saad Saoud, L.; Abujabal, M.; Sultan, A.; Elmezain, M.; Seneviratne, L.; Hussain, I. Underwater SLAM Meets Deep Learning: Challenges, Multi-Sensor Integration, and Future Directions. Sensors 2025, 25, 3258. [Google Scholar] [CrossRef]
- Besl, P.J.; McKay, N.D. A Method for Registration of 3-d Shapes. IEEE Trans. Pattern Anal. Mach. Intell. 1992, 14, 239–256. [Google Scholar] [CrossRef]
- Machado, M.; Zaffari, G.; Ribeiro, P.O.; Drews-Jr, P.; Botelho, S. Description and Matching of Acoustic Images Using a Forward Looking Sonar: A Topological Approach. IFAC-PapersOnLine 2017, 50, 2317–2322. [Google Scholar] [CrossRef]
- Latombe, J.-C. Robot Motion Planning, 1st ed.; Springer: New York, NY, USA, 1991; ISBN 978-1-4615-4022-9. [Google Scholar]
- Cheng, C.; Sha, Q.; He, B.; Li, G. Path Planning and Obstacle Avoidance for AUV: A Review. Ocean. Eng. 2021, 235, 109355. [Google Scholar] [CrossRef]
- Khatib, O. Real-Time Obstacle Avoidance for Manipulators and Mobile Robots. In Autonomous Robot Vehicles; Cox, I.J., Wilfong, G.T., Eds.; Springer: New York, NY, USA, 1990; pp. 396–404. ISBN 978-1-4613-8997-2. [Google Scholar]
- Fox, D.; Burgard, W.; Thrun, S. The Dynamic Window Approach to Collision Avoidance. IEEE Robot. Autom. Mag. 1997, 4, 23–33. [Google Scholar] [CrossRef]
- Wang, Z.; Liang, Y.; Gong, C.; Zhou, Y.; Zeng, C.; Zhu, S. Improved Dynamic Window Approach for Unmanned Surface Vehicles’ Local Path Planning Considering the Impact of Environmental Factors. Sensors 2022, 22, 5181. [Google Scholar] [CrossRef]
- Liu, B.; Zhang, H.; Nian, M.; Ouyang, H.; Xu, S. AUV Local Path Planning Based on an Improved DWA Algorithm in Complex Dynamic Environments. In Proceedings of the 2025 IEEE 6th International Seminar on Artificial Intelligence, Networking and Information Technology (AINIT), Shenzhen, China, 11–13 April 2025; pp. 1–8. [Google Scholar]
- Fiorini, P. Motion Planning in Dynamic Environments Using Velocity Obstacles. Int. J. Robot. Res. 1998, 17, 760–772. [Google Scholar] [CrossRef]
- Koren, Y.; Borenstein, J. Potential Field Methods and Their Inherent Limitations for Mobile Robot Navigation. In Proceedings of the Proceedings 1991 IEEE International Conference on Robotics and Automation, Sacramento, CA, USA, 7–12 April 1991; Volume 2, pp. 1398–1404. [Google Scholar]
- Hart, P.E.; Nilsson, N.J.; Raphael, B. A Formal Basis for the Heuristic Determination of Minimum Cost Paths. IEEE Trans. Syst. Sci. Cybern. 1968, 4, 100–107. [Google Scholar] [CrossRef]
- Koenig, S.; Likhachev, M.; Furcy, D. Lifelong Planning a*. Artif. Intell. 2004, 155, 93–146. [Google Scholar] [CrossRef]
- Koenig, S.; Likhachev, M. Fast Replanning for Navigation in Unknown Terrain. IEEE Trans. Robot. 2005, 21, 354–363. [Google Scholar] [CrossRef]
- LaValle, S.M. Rapidly-Exploring Random Trees: A New Tool for Path Planning; Technical Report TR 98-11; Department of Computer Science, Iowa State University: Ames, IA, USA, 1998. [Google Scholar]
- Zhang, L.; Lin, Z.; Wang, J.; He, B. Rapidly-Exploring Random Trees Multi-Robot Map Exploration Under Optimization Framework. Robot. Auton. Syst. 2020, 131, 103565. [Google Scholar] [CrossRef]
- Kuffner, J.J.; LaValle, S.M. RRT-Connect: An Efficient Approach to Single-Query Path Planning. In Proceedings of the Proceedings 2000 ICRA. Millennium Conference. IEEE International Conference on Robotics and Automation. Symposia Proceedings (Cat. no.00CH37065), San Francisco, CA, USA, 24–28 April 2000; Volume 2, pp. 995–1001. [Google Scholar]
- Chen, Y.; Wang, L. Adaptively Dynamic RRT*-Connect: Path Planning for UAVs Against Dynamic Obstacles. In Proceedings of the 2022 7th International Conference on Automation, Control and Robotics Engineering (CACRE), Xi’an, China, 14–16 July 2022; pp. 1–7. [Google Scholar]
- Arslan, O.; Berntorp, K.; Tsiotras, P. Sampling-Based Algorithms for Optimal Motion Planning Using Closed-Loop Prediction. In Proceedings of the 2017 IEEE International Conference on Robotics and Automation (ICRA), Singapore, 29 May–3 June 2017; pp. 4991–4996. [Google Scholar]
- Xie, C.; Wang, Y.; Liu, Y.; Li, Z.; Zhu, J.; Qin, J. An AUV Path Planning Method Based on Improved APF-RRT*. In Proceedings of the 2023 IEEE International Conference on Mechatronics and Automation (ICMA), Heilongjiang, China, 6–9 August 2023; pp. 1190–1195. [Google Scholar]
- Gammell, J.D.; Srinivasa, S.S.; Barfoot, T.D. Informed RRT*: Optimal Sampling-Based Path Planning Focused via Direct Sampling of an Admissible Ellipsoidal Heuristic. In Proceedings of the 2014 IEEE/RSJ International Conference on Intelligent Robots and Systems, Chicago, IL, USA, 14–18 September 2014; pp. 2997–3004. [Google Scholar]
- Wang, Y.; Li, J.; Yang, Y.; Liu, C.; Tang, Q. An Improved Informed RRT*-Connect Algorithm for UAVs Path Planning. In Proceedings of the 2024 IEEE International Conference on Unmanned Systems (ICUS), Nanjing, China, 18–20 October 2024; pp. 325–333. [Google Scholar]
- Webb, D.J.; Berg, J. van den Kinodynamic RRT*: Asymptotically Optimal Motion Planning for Robots with Linear Dynamics. In Proceedings of the 2013 IEEE International Conference on Robotics and Automation, Karlsruhe, Germany, 6–10 May 2013; pp. 5054–5061. [Google Scholar]
- Taheri, E.; Ferdowsi, M.H.; Danesh, M. Closed-Loop Randomized Kinodynamic Path Planning for an Autonomous Underwater Vehicle. Appl. Ocean. Res. 2019, 83, 48–64. [Google Scholar] [CrossRef]
- Gurve, V.; Mahajan, S.; Wagle, S.A. Robot motion planning: Methods, challenges, and future directions. Int. J. Intell. Robot. Appl. 2025, 9, 1–12. [Google Scholar] [CrossRef]
- Dong, L.; He, Z.; Song, C.; Sun, C. A Review of Mobile Robot Motion Planning Methods: From Classical Motion Planning Workflows to Reinforcement Learning-Based Architectures. J. Syst. Eng. Electron. 2023, 34, 439–459. [Google Scholar] [CrossRef]
- Ma, D.; Chen, X.; Ma, W.; Zheng, H.; Qu, F. Neural Network Model-Based Reinforcement Learning Control for AUV 3D Path Following. IEEE Trans. Intell. Veh. 2024, 9, 893–904. [Google Scholar] [CrossRef]
- Wen, J.; Dai, H.; He, J.; Sun, L.; Gao, L. Intelligent Decision-Making Method for AUV Path Planning Against Ocean Current Disturbance via Reinforcement Learning. IEEE Internet Things J. 2024, 11, 38965–38975. [Google Scholar] [CrossRef]
- Wang, Q.; Liu, C.; Meng, Y.; Ren, X.; Wang, X. Reinforcement Learning-Based Moving-Target Enclosing Control for an Unmanned Surface Vehicle in Multi-Obstacle Environments. Ocean. Eng. 2024, 304, 117920. [Google Scholar] [CrossRef]
- Li, G.; Wong, T.W.; Shih, B.; Guo, C.; Wang, L.; Liu, J.; Wang, T.; Liu, X.; Yan, J.; Wu, B.; et al. Bioinspired soft robots for deep-sea exploration. Nat. Commun. 2023, 14, 7097. [Google Scholar] [CrossRef] [PubMed]
- Zhao, Z.; Yang, Q.; Li, R.; Yang, J.; Liu, Q.; Zhu, B.; Weng, C.; Liu, W.; Hu, P.; Ma, L.; et al. A Comprehensive Review on the Evolution of Bio-Inspired Sensors from Aquatic Creatures. Cell Rep. Phys. Sci. 2024, 5, 102064. [Google Scholar] [CrossRef]
- Cheng, H.Y.; Yu, S.M.; Yu, H.; Zhu, J.; Chu, J. Bioinspired Underwater Navigation Using Polarization Patterns Within Snell’s Window. China Ocean. Eng. 2023, 37, 628–636. [Google Scholar] [CrossRef]
- Qiao, Q.; Kong, X.; Wu, S.; Liu, G.; Zhang, G.; Yang, H.; Zhang, W.; Yang, Y.; Jia, L.; He, C.; et al. A Bio-Inspired MEMS Wake Detector for AUV Tracking and Coordinated Formation. Remote Sens. 2023, 15, 2949. [Google Scholar] [CrossRef]
- Shu, S.; Wang, T.; He, J.; Chen, P.; Xu, S.; Li, C.; Xu, M.; Tang, W. Bionic Underwater Multimodal Sensor Inspired by Fish Lateralis Neuromasts. Device 2023, 1, 100175. [Google Scholar] [CrossRef]
- Xu, P.; Liu, J.; Liu, X.; Wang, X.; Zheng, J.; Wang, S.; Chen, T.; Wang, H.; Wang, C.; Fu, X.; et al. A Bio-Inspired and Self-Powered Triboelectric Tactile Sensor for Underwater Vehicle Perception. npj Flex. Electron. 2022, 6, 25. [Google Scholar] [CrossRef]
- Jiu, H.; Deng, W. A planning method for chemical plume tracking and source localization with autonomous underwater vehicle. Int. J. Adv. Robot. Syst. 2024, 21, 17298806241233909. [Google Scholar] [CrossRef]
- Sahoo, S.P.; Das, B.; Pati, B.B.; Garcia Marquez, F.P.; Segovia Ramirez, I. Hybrid Path Planning Using a Bionic-Inspired Optimization Algorithm for Autonomous Underwater Vehicles. J. Mar. Sci. Eng. 2023, 11, 761. [Google Scholar] [CrossRef]
- Zhi-Wen, W.; Kun, L.M.; Li-jing, W. Path Planning for UUV in Dynamic Environment. In Proceedings of the 2016 9th International Symposium on Computational Intelligence and Design (ISCID), Hangzhou, China, 10–11 December 2016; Volume 1, pp. 211–215. [Google Scholar]
- Zhang, Y.; Gong, D.; Zhang, J. Robot Path Planning in Uncertain Environment Using Multi-Objective Particle Swarm Optimization. Neurocomputing 2013, 103, 172–185. [Google Scholar] [CrossRef]
- Triantafyllou, M.; Triantafyllou, G. An Efficient Swimming Machine. Sci. Am. 1995, 272, 64–70. [Google Scholar] [CrossRef]
- Cui, W.; Pan, L.; Li, R. A Suggestion of Using Task Efficiency to Replace Swimming Efficiency for Both Robotic Fish and Living Fish. Ships Offshore Struct. 2024, 19, 2204–2212. [Google Scholar] [CrossRef]
- Goodyear, C.P.; Ferguson, D.E. Sun-Compass Orientation in the Mosquitofish, Gambusia affinis. Anim. Behav. 1969, 17, 636–640. [Google Scholar] [CrossRef]
- Winn, H.; Salmon, M.; Roberts, N. Sun-Compass Orientation by Parrot Fishes. Ethology 2010, 21, 798–812. [Google Scholar] [CrossRef]
- Faillettaz, R.; Blandin, A.; Koubbi, P.; Irisson, J.-O. Sun-Compass Orientation in Mediterranean Fish Larvae. PLoS ONE 2015, 10, e0135213. [Google Scholar] [CrossRef]
- Foster, J.; Temple, S.; How, M.; Daly, I.; Sharkey, C.; Wilby, D.; Roberts, N. Polarization Vision—Overcoming Challenges of Working with a Property of Light We Barely See. Sci. Nat. 2018, 105, 27. [Google Scholar] [CrossRef]
- Berenshtein, I.; Kiflawi, M.; Shashar, N.; Wieler, U.; Agiv, H. Polarized Light Sensitivity and Orientation in Coral Reef Fish Post-Larvae. PLoS ONE 2014, 9, e88468. [Google Scholar] [CrossRef] [PubMed]
- Lee, S.A.; Ferrari, A.; Vallortigara, G.; Sovrano, V.A. Boundary Primacy in Spatial Mapping: Evidence from Zebrafish (Danio rerio). Behav. Process. 2015, 119, 116–122. [Google Scholar] [CrossRef]
- Kasumyan, A. The Lateral Line in Fish: Structure, Function, and Role in Behavior. J. Ichthyol. 2003, 43, S175–S213. [Google Scholar]
- Bleckmann, H. The Lateral Line System of Fish. In Sensory Systems Neuroscience; Academic Press: Oxford, UK, 2006; Volume 25, pp. 411–453. [Google Scholar]
- Jiang, Y.; Ma, Z.; Zhang, D. Flow Field Perception Based on the Fish Lateral Line System. Bioinspiration Biomim. 2019, 14, 041001. [Google Scholar] [CrossRef] [PubMed]
- Coombs, S.; Bleckmann, H.; Fay, R.R.; Popper, A.N. (Eds.) The Lateral Line System; Springer: New York, NY, USA, 2014; ISBN 978-1-4614-8851-4. [Google Scholar]
- Montgomery, J.; Baker, C.; Carton, A. The Lateral Line Can Mediate Rheotaxis in Fish. Nature 1997, 389, 960–963. [Google Scholar] [CrossRef]
- Lloyd, E.; Olive, C.; Stahl, B.A.; Jaggard, J.B.; Amaral, P.; Duboué, E.R.; Keene, A.C. Evolutionary Shift Towards Lateral Line Dependent Prey Capture Behavior in the Blind Mexican Cavefish. Dev. Biol. 2018, 441, 328–337. [Google Scholar] [CrossRef]
- Rodríguez-Morales, R. Sensing in the Dark: Constructive Evolution of the Lateral Line System in Blind Populations of Astyanax mexicanus. Ecol. Evol. 2024, 14, e11286. [Google Scholar] [CrossRef]
- Veith, J.; Chaigne, T.; Svanidze, A.; Dressler, L.E.; Hoffmann, M.; Gerhardt, B.; Judkewitz, B. The Mechanism for Directional Hearing in Fish. Nature 2024, 631, 118–124. [Google Scholar] [CrossRef]
- Ladich, F.; Schulz-Mirbach, T. Diversity in Fish Auditory Systems: One of the Riddles of Sensory Biology. Front. Ecol. Evol. 2016, 4, 28. [Google Scholar] [CrossRef]
- Deng, X.; Wagner, H.J.; Popper, A.N. The Inner Ear and Its Coupling to the Swim Bladder in the Deep-Sea Fish Antimora rostrata (Teleostei: Moridae). Deep. Sea Res. Part I Oceanogr. Res. Pap. 2011, 58, 27–37. [Google Scholar] [CrossRef] [PubMed]
- Vickers, N. Mechanisms of Animal Navigation in Odor Plumes. Biol. Bull. 2000, 198, 203–212. [Google Scholar] [CrossRef] [PubMed]
- Dittman, A.H.; Quinn, T.P. Homing in Pacific Salmon: Mechanisms and Ecological Basis. J. Exp. Biol. 1996, 199, 83–91. [Google Scholar] [CrossRef]
- Hasler, A.D.; Scholz, A.T. Olfactory Imprinting and Homing in Salmon: Investigations into the Mechanism of the Imprinting Process; Springer: Berlin/Heidelberg, Germany, 1983; ISBN 978-3-642-82070-0. [Google Scholar]
- Lohmann, K.; Lohmann, C.; Putman, N. Magnetic Maps in Animals: Nature’s GPS. J. Exp. Biol. 2007, 210, 3697–3705. [Google Scholar] [CrossRef]
- Lohmann, K.; Goforth, K.; Mackiewicz, A.; Lim, D.; Lohmann, C. Magnetic Maps in Animal Navigation. J. Comp. Physiol. A 2022, 208, 41–67. [Google Scholar] [CrossRef]
- Putman, N.F.; Scanlan, M.M.; Billman, E.J.; O’Neil, J.P.; Couture, R.B.; Quinn, T.P.; Lohmann, K.J.; Noakes, D.L. An Inherited Magnetic Map Guides Ocean Navigation in Juvenile Pacific Salmon. Curr. Biol. 2014, 24, 446–450. [Google Scholar] [CrossRef]
- Bullock, T.H. Electroreception. Annu. Rev. Neurosci. 1982, 5, 121–170. [Google Scholar] [CrossRef]
- Kalmijn, A.J. The Electric Sense of Sharks and Rays. J. Exp. Biol. 1971, 55, 371–383. [Google Scholar] [CrossRef]
- Emde, G. von der Active Electrolocation of Objects in Weakly Electric Fish. J. Exp. Biol. 1999, 202, 1205–1215. [Google Scholar] [CrossRef]
- Bullock, T.H.; Hopkins, C.D.; Popper, A.N.; Fay, R.R. (Eds.) Electroreception, 1st ed.; Springer: New York, NY, USA, 2005; ISBN 978-0-387-23192-1. [Google Scholar]
- Catania, K. The Shocking Predatory Strike of the Electric Eel. Science 2014, 346, 1231–1234. [Google Scholar] [CrossRef]
- Ueda, H. Physiological Mechanism of Homing Migration in Pacific Salmon from Behavioral to Molecular Biological Approaches. Gen. Comp. Endocrinol. 2011, 170, 222–232. [Google Scholar] [CrossRef] [PubMed]
- Klimley, A.P. Highly Directional Swimming by Scalloped Hammerhead Sharks, Sphyrna lewini, and Subsurface Irradiance, Temperature, Bathymetry, and Geomagnetic Field. Mar. Biol. 1993, 117, 1–22. [Google Scholar] [CrossRef]
- Simpson, S.; Meekan, M.; Montgomery, J.; McCauley, R.; Jeffs, A. Homeward Sound. Science 2005, 308, 221. [Google Scholar] [CrossRef]
- Walton, A.G.; Moller, P. Maze Learning and Recall in a Weakly Electric Fish, Mormyrus rume proboscirostris Boulenger (Mormyridae, Teleostei). Ethology 2010, 116, 904–919. [Google Scholar] [CrossRef]
- Aronson, L.R. Further Studies on Orientation and Jumping Behavior in the Gobiid Fish, Bathygobius soporator. Ann. N. Y. Acad. Sci. 1971, 188, 378–392. [Google Scholar] [CrossRef]
- Teyke, T. Learning and Remembering the Environment in the Blind Cave Fish Anoptichthys jordani. J. Comp. Physiol. A 1989, 164, 655–662. [Google Scholar] [CrossRef]
- Sato, H.; Berry, C.W.; Casey, B.E.; Lavella, G.; Yao, Y.; VandenBrooks, J.M.; Maharbiz, M.M. A Cyborg Beetle: Insect Flight Control Through an Implantable, Tetherless Microsystem. In Proceedings of the 2008 IEEE 21st International Conference on Micro Electro Mechanical Systems, Tucson, AZ, USA, 13–17 January 2008; pp. 164–167. [Google Scholar]
- Fitzgerald, L.; Le, H.N.; Wilson, R.S.; Nguyen, H.D.; Do, T.N.; Vo-Doan, T.T. Zoborg: On-Demand Climbing Control for Cyborg Beetles. Adv. Sci. 2025, 12, e02095. [Google Scholar] [CrossRef]
- Ma, S.; Chen, Y.; Yang, S.; Liu, S.; Tang, L.; Li, B.; Li, Y. The Autonomous Pipeline Navigation of a Cockroach Bio-Robot with Enhanced Walking Stimuli. Cyborg Bionic Syst. 2023, 4, 0067. [Google Scholar] [CrossRef]
- Ariyanto, M.; Refat, C.M.M.; Yamamoto, K.; Morishima, K. Feedback Control of Automatic Navigation for Cyborg Cockroach Without External Motion Capture System. Heliyon 2024, 10, e26987. [Google Scholar] [CrossRef]
- Sato, H.; Berry, C.W.; Peeri, Y.; Baghoomian, E.; Casey, B.E.; Lavella, G.; VandenBrooks, J.M.; Harrison, J.F.; Maharbiz, M.M. Remote Radio Control of Insect Flight. Front. Integr. Neurosci. 2009, 3, 24. [Google Scholar] [CrossRef]
- Cao, F.; Zhang, C.; Vo Doan, T.T.; Li, Y.; Sangi, D.H.; Koh, J.S.; Huynh, N.A.; Bin Aziz, M.F.; Choo, H.Y.; Ikeda, K.; et al. A Biological Micro Actuator: Graded and Closed-Loop Control of Insect Leg Motion by Electrical Stimulation of Muscles. PLoS ONE 2014, 9, e105389. [Google Scholar] [CrossRef] [PubMed]
- Tsang, W.M.; Stone, A.L.; Otten, D.; Aldworth, Z.N.; Daniel, T.L.; Hildebrand, J.G.; Levine, R.B.; Voldman, J. Insect-machine interface: A carbon nanotube-enhanced flexible neural probe. J. Neurosci. Methods 2012, 204, 355–365. [Google Scholar] [CrossRef] [PubMed]
- Zhou, Z.; Mei, H.; Li, R.; Wang, C.; Fang, K.; Wang, W.; Tang, Y.; Dai, Z. Progresses of Animal Robots: A Historical Review and Perspectiveness. Heliyon 2022, 8, e11499. [Google Scholar] [CrossRef] [PubMed]
- Shik, M.; Severin, F.; Orlovsky, G. Control of Walking and Running by Means of Electrical Stimulation of the Mesencephalon. Electroencephalogr. Clin. Neurophysiol. 1969, 26, 549. [Google Scholar]
- Grillner, S. Some Aspects on the Descending Control of the Spinal Circuits Generating Locomotor Movements. In Neural control of Locomotion; Herman, R.M., Grillner, S., Stein, P.S.G., Stuart, D.G., Eds.; Springer US: Boston, MA, USA, 1976; pp. 351–375. ISBN 978-1-4757-0964-3. [Google Scholar]
- Talwar, S.K.; Xu, S.; Hawley, E.S.; Weiss, S.A.; Moxon, K.A.; Chapin, J.K. Rat Navigation Guided by Remote Control. Nature 2002, 417, 37–38. [Google Scholar] [CrossRef]
- Xu, S.; Talwar, S.K.; Hawley, E.S.; Li, L.; Chapin, J.K. A Multi-Channel Telemetry System for Brain Microstimulation in Freely Roaming Animals. J. Neurosci. Methods 2004, 133, 57–63. [Google Scholar] [CrossRef]
- Graziano, M.S.A.; Taylor, C.S.R.; Moore, T. Complex Movements Evoked by Microstimulation of Precentral Cortex. Neuron 2002, 34, 841–851. [Google Scholar] [CrossRef]
- Ekeberg, Ö.; Grillner, S. Simulations of Neuromuscular Control in Lamprey Swimming. Philos. Trans. R. Soc. Lond. Ser. B Biol. Sci. 1999, 354, 895–902. [Google Scholar] [CrossRef]
- Sirota, M.G.; Di Prisco, G.V.; Dubuc, R. Stimulation of the Mesencephalic Locomotor Region Elicits Controlled Swimming in Semi-Intact Lampreys. Eur. J. Neurosci. 2000, 12, 4081–4092. [Google Scholar] [CrossRef]
- Arrenberg, A.B.; Bene, F.D.; Baier, H. Optical Control of Zebrafish Behavior with Halorhodopsin. Proc. Natl. Acad. Sci. USA 2009, 106, 17968–17973. [Google Scholar] [CrossRef]
- Kobayashi, N.; Yoshida, M.; Matsumoto, N.; Uematsu, K. Artificial Control of Swimming in Goldfish by Brain Stimulation: Confirmation of the Midbrain Nuclei as the Swimming Center. Neurosci. Lett. 2009, 452, 42–46. [Google Scholar] [CrossRef] [PubMed]
- Vinepinsky, E.; Cohen, L.; Perchik, S.; Las, L.; Netser, S. Representation of Edges, Head Direction, and Swimming Kinematics in the Brain of Freely-Navigating Fish. Sci. Rep. 2020, 10, 14762. [Google Scholar] [CrossRef] [PubMed]
- Ricotti, L.; Trimmer, B.; Feinberg, A.; Raman, R.; Parker, K.; Sitti, M.; Martel, S.; Dario, P.; Menciassi, A. Biohybrid Actuators for Robotics: A Review of Devices Actuated by Living Cells. Sci. Robot. 2017, 2, eaaq0495. [Google Scholar] [CrossRef]
- Kajiura, S.M.; Fitzgerald, T.P. Response of Juvenile Scalloped Hammerhead Sharks to Electric Stimuli. Zoology 2009, 112, 241–250. [Google Scholar] [CrossRef] [PubMed]
- Lee, S.; Kim, C.-H.; Kim, D.-G.; Kim, H.-G.; Lee, P.-S.; Myung, H. Remote Guidance of Untrained Turtles by Controlling Voluntary Instinct Behavior. PLoS ONE 2013, 8, e0061798. [Google Scholar] [CrossRef]
- Kim, C.-H.; Choi, B.; Kim, D.-G.; Lee, S.; Jo, S.; Lee, P.-S. Remote Navigation of Turtle by Controlling Instinct Behavior via Human Brain-Computer Interface. J. Bionic Eng. 2016, 13, 491–503. [Google Scholar] [CrossRef]
- Kim, D.-G.; Lee, S.; Kim, C.-H.; Jo, S.; Lee, P.-S. Parasitic Robot System for Waypoint Navigation of Turtle. J. Bionic Eng. 2017, 14, 327–335. [Google Scholar] [CrossRef]
- Romano, D.; Donati, E.; Benelli, G.; Stefanini, C. A review on animal–robot interaction: From bio-hybrid organisms to mixed societies. Biol. Cybern. 2019, 113, 201–225. [Google Scholar] [CrossRef]
- Russell, W.M.S.; Burch, R.L. The Principles of Humane Experimental Technique. Med. J. Aust. 1960, 1, 500–502. [Google Scholar]
- Ashwood, Z.; Jha, A.; Pillow, J.W. Dynamic Inverse Reinforcement Learning for Characterizing Animal Behavior. In Proceedings of the Advances in Neural Information Processing Systems, New Orleans, LA, USA, 28 November–9 December 2022; Koyejo, S., Mohamed, S., Agarwal, A., Belgrave, D., Cho, K., Oh, A., Eds.; Curran Associates, Inc.: Red Hook, NY, USA, 2022; Volume 35, pp. 29663–29676. [Google Scholar]
- Xu, X.; Scott-Scheiern, T.; Kempker, L.; Simons, K. Active Avoidance Conditioning in Zebrafish (Danio rerio). Neurobiol. Learn. Mem. 2007, 87, 72–77. [Google Scholar] [CrossRef]
- Furton, K.; Myers, L. The Scientific Foundation and Efficacy of the Use of Canines as Chemical Detectors for Explosives. Talanta 2001, 54, 487–500. [Google Scholar] [CrossRef]
- Moore, P.W. Mine-Hunting Dolphins of the Navy. In Proceedings of the Detection and Remediation Technologies for Mines and Mine-like Targets II; SPIE: Bellingham, WA, USA, 1997; Volume 3079, pp. 2–6. [Google Scholar]
- Poling, A.; Weetjens, B.J.; Cox, C.; Beyene, N.; Bach, H.; Sully, A. Teaching Giant African Pouched Rats to Find Landmines: Operant Conditioning with Real Consequences. Behav. Anal. Pract. 2010, 3, 19–25. [Google Scholar] [CrossRef] [PubMed]
- Webb, E.K.; Saccardo, C.C.; Poling, A.; Cox, C.; Fast, C.D. Rapidly Training African Giant Pouched Rats (Cricetomys ansorgei) with Multiple Targets for Scent Detection. Behav. Process. 2020, 174, 104085. [Google Scholar] [CrossRef] [PubMed]
- Pritchett, D.; Brennan, C.H. Chapter 7—Classical and Operant Conditioning in Larval Zebrafish. In Behavioral and Neural Genetics of Zebrafish; Gerlai, R.T., Ed.; Academic Press: Cambridge, MA, USA, 2020; pp. 107–122. ISBN 978-0-12-817528-6. [Google Scholar]
- Barreiros, M.d.O.; Barbosa, F.G.; Dantas, D.d.O.; Santos, D.d.M.L.d.; Ribeiro, S.; Santos, G.C.d.O.; Barros, A.K. Zebrafish Automatic Monitoring System for Conditioning and Behavioral Analysis. Sci. Rep. 2021, 11, 9330. [Google Scholar] [CrossRef] [PubMed]
- Braubach, O.R.; Wood, H.-D.; Gadbois, S.; Fine, A.; Croll, R.P. Olfactory Conditioning in the Zebrafish (Danio rerio). Behav. Brain Res. 2009, 198, 190–198. [Google Scholar] [CrossRef]
- Zippel, H.P.; Voigt, R.; Knaust, M.; Luan, H.L.E. Spontaneous Behavior, Training and Discrimination Training in Goldfish Using Chemosensory Stimuli. J. Comp. Physiol. A 1993, 172, 81–90. [Google Scholar] [CrossRef]
- Givon, S.; Samina, M.; Ben-Shahar, O.; Segev, R. From Fish Out of Water to New Insights on Navigation Mechanisms in Animals. Behav. Brain Res. 2022, 419, 113711. [Google Scholar] [CrossRef]
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).