


Containment-Based Distributed Secondary Control for AC Shipboard Microgrids under General Noise


Abstract
1. Introduction
- (1)
- A polymorphic SMG was constructed, through which heterogeneous DGs can transfer data to support the implementation of distributed secondary control and software-defined algorithms can be implemented.
- (2)
- In contrast to the existing research on the distributed consensus-based strategy, this paper investigates the containment-based control strategy for AC SMGs. The containment-based distributed secondary control is proposed to improve the flexibility of the DGs to regulate the voltage at each PCC point of the SMGs and make it available in a wider range of actual situations.
- (3)
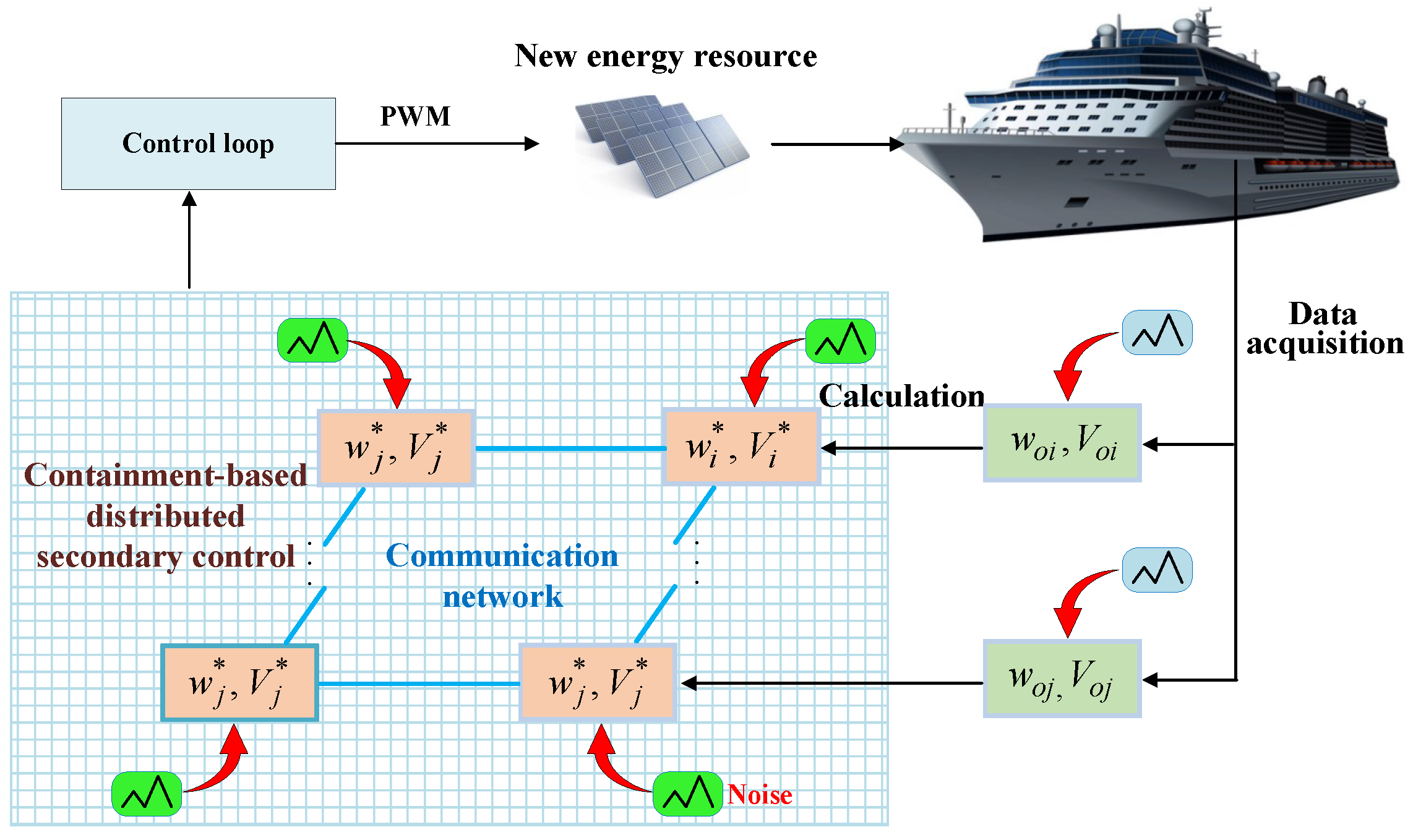
- General noise is introduced to describe the impact of disturbances on the proposed strategy. Based on the RDEs [32], the proposed strategy is proved to be NOS stable, and the mean square of the containment error can converge to a small neighborhood around the origin, which means that the AC SMG achieves containment control under general noise.
2. Problem Statement
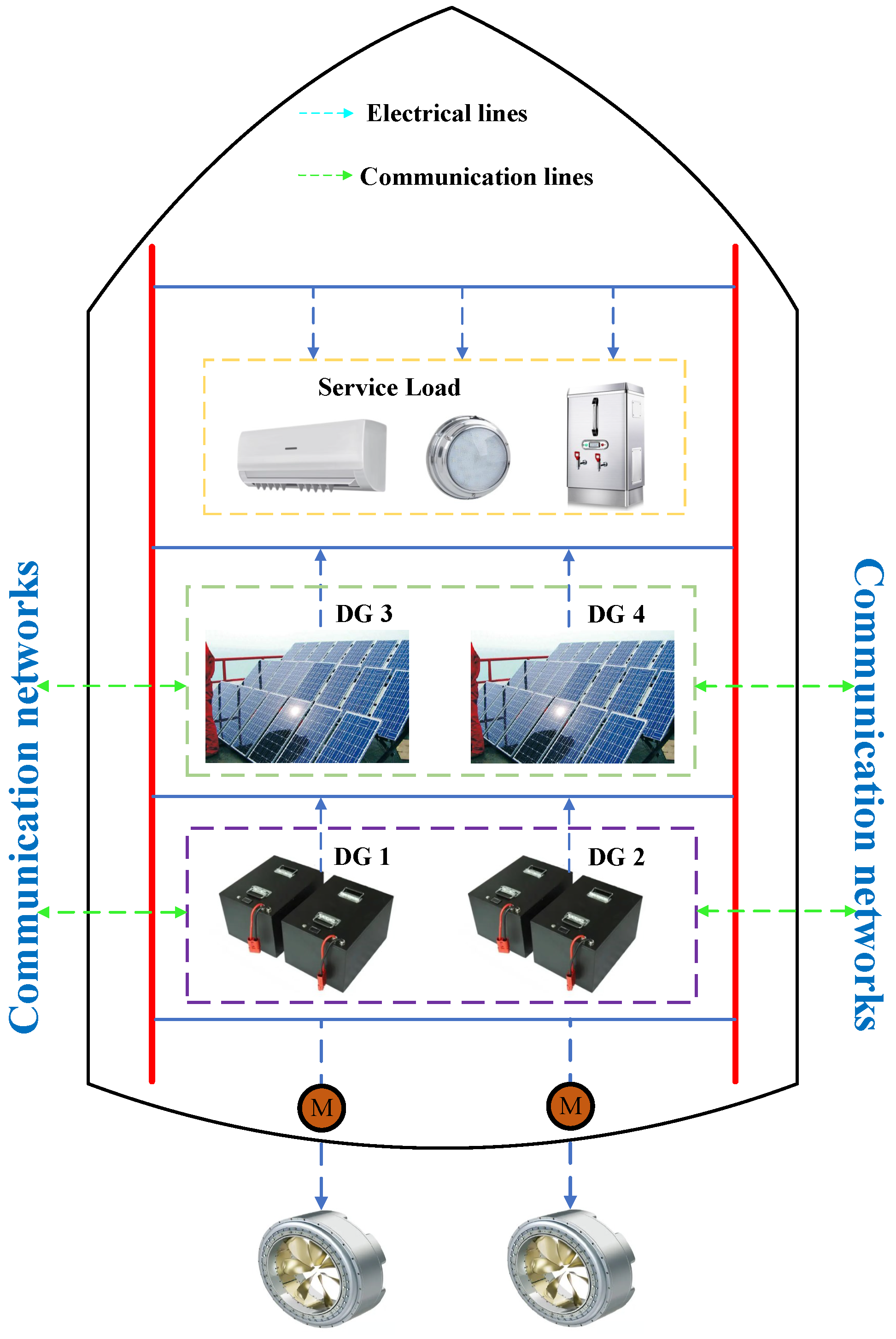
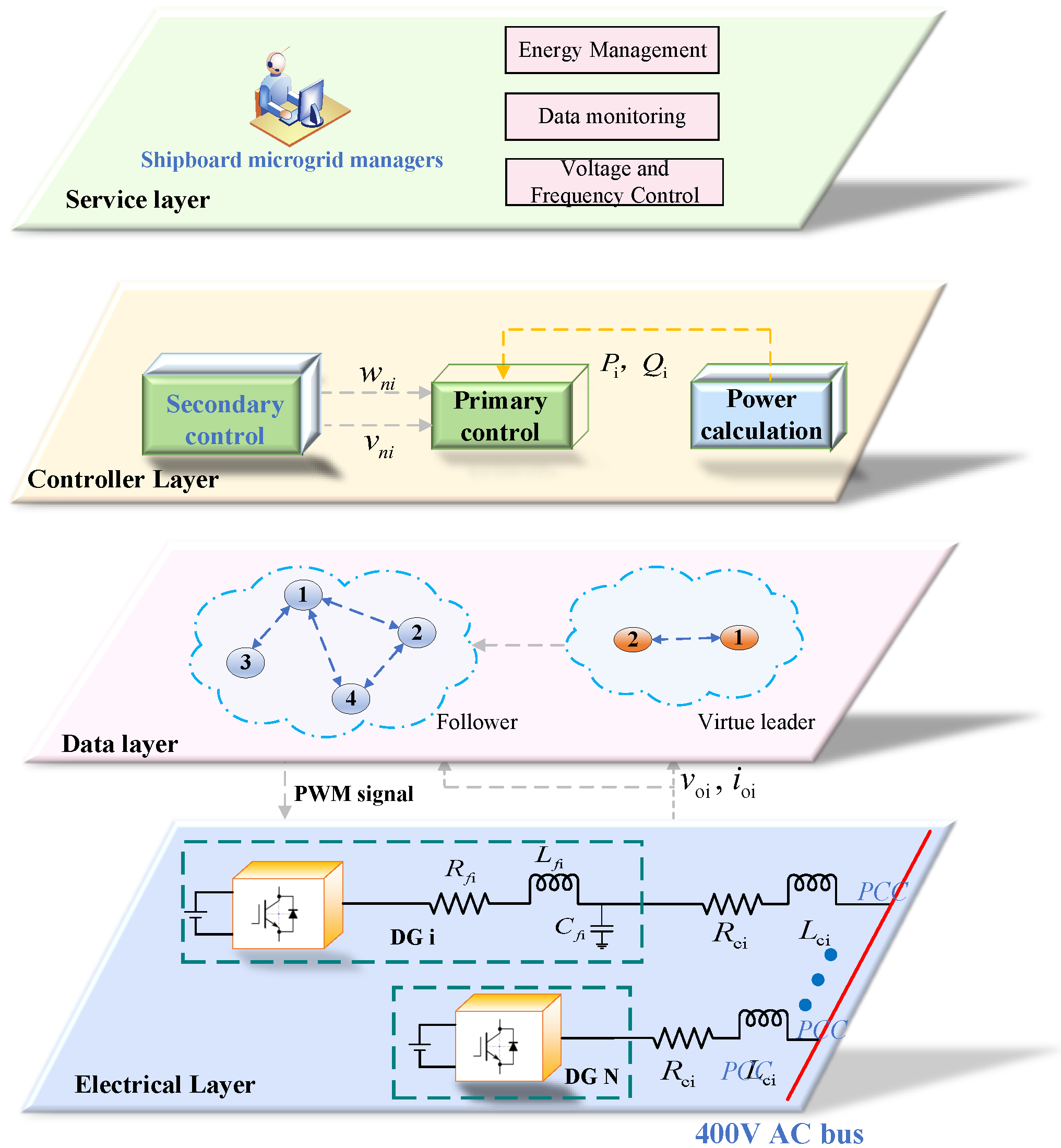
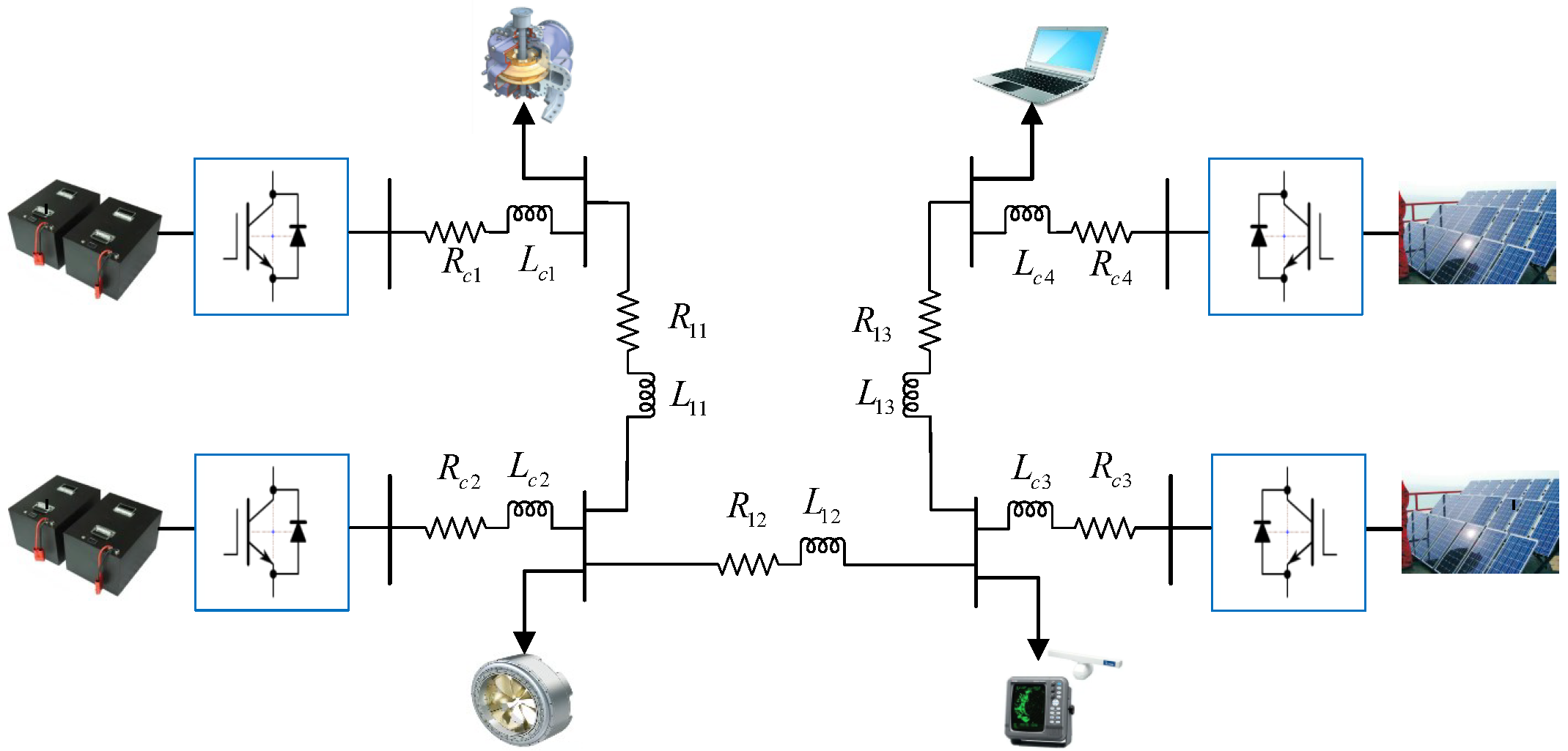
2.1. The Framework of the Polymorphic Shipboard Microgrid
2.2. Graph Theory
3. Main Results
3.1. The Hierarchical Control of AC SMGs
3.2. The Impact of General Noise on Distributed Secondary Control for SMGs
3.3. Containment-Based Distributed Secondary Control Strategy under General Noise
4. Case Study
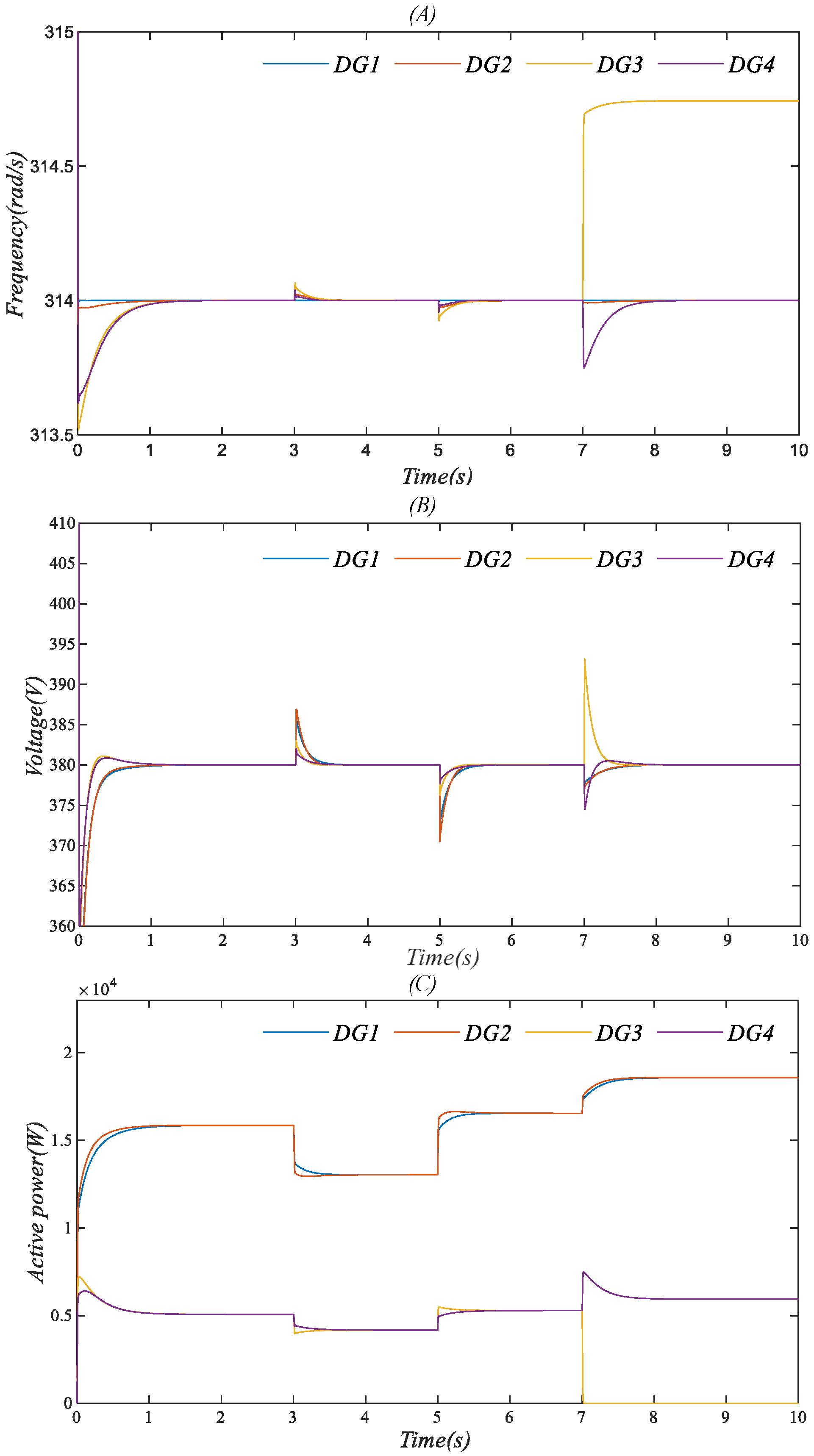
4.1. Case 1: The Effectiveness of the Consensus-Based Distributed Secondary Control Strategy under Load Disturbance and No General Noise
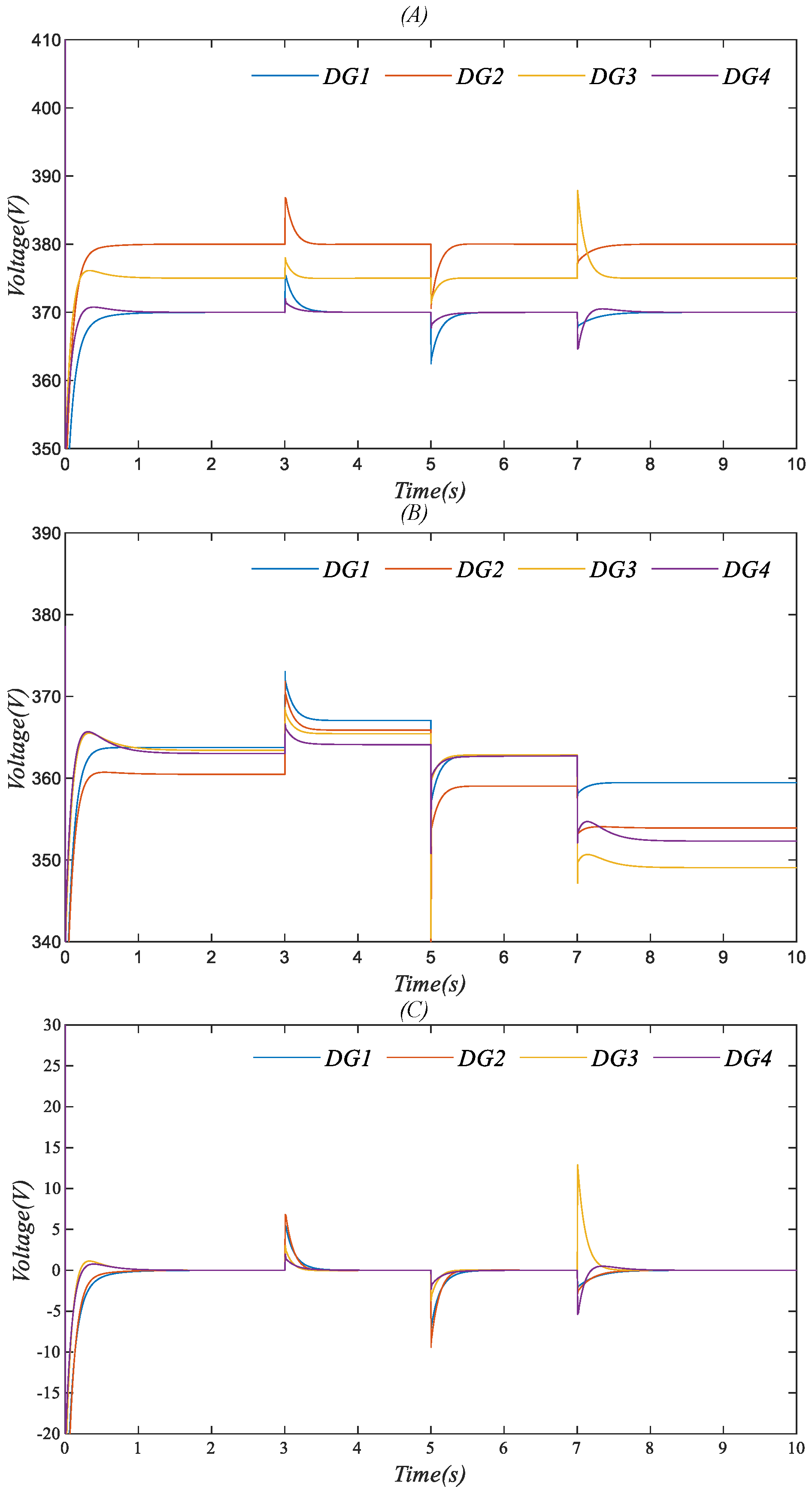
4.2. Case 2: The Effectiveness of the Distributed Containment Control Strategy under Load Disturbance and No General Noise
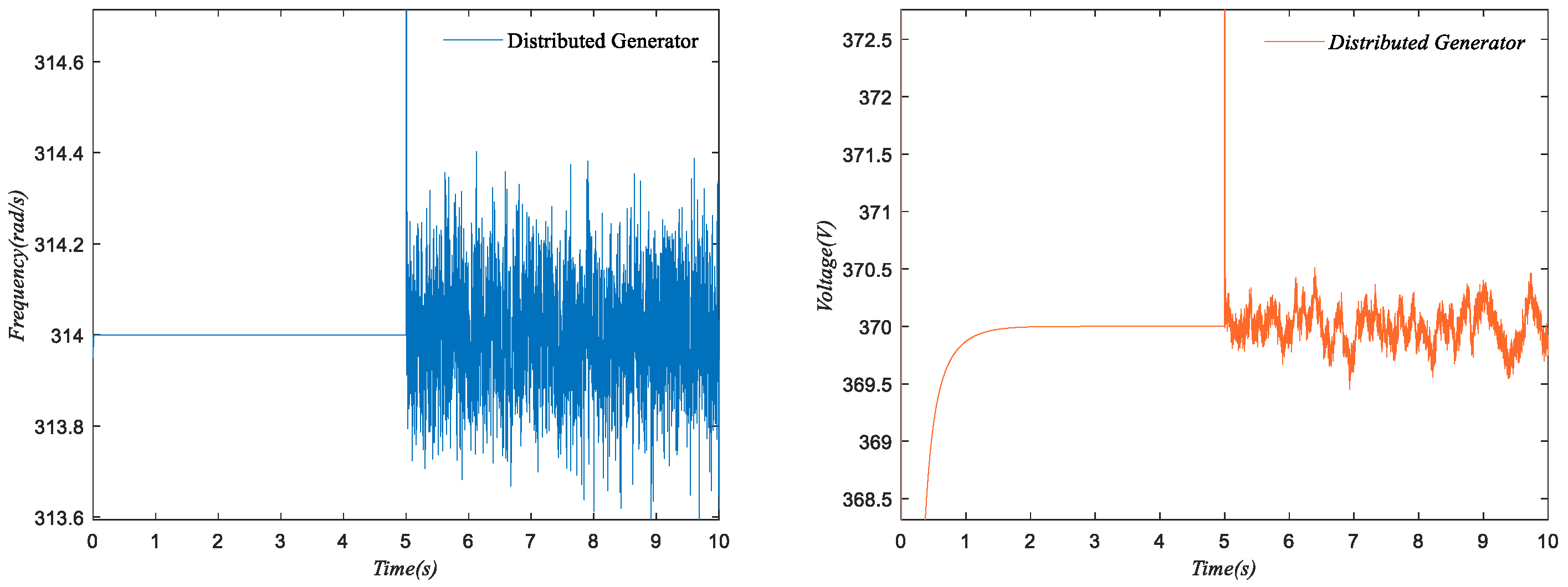
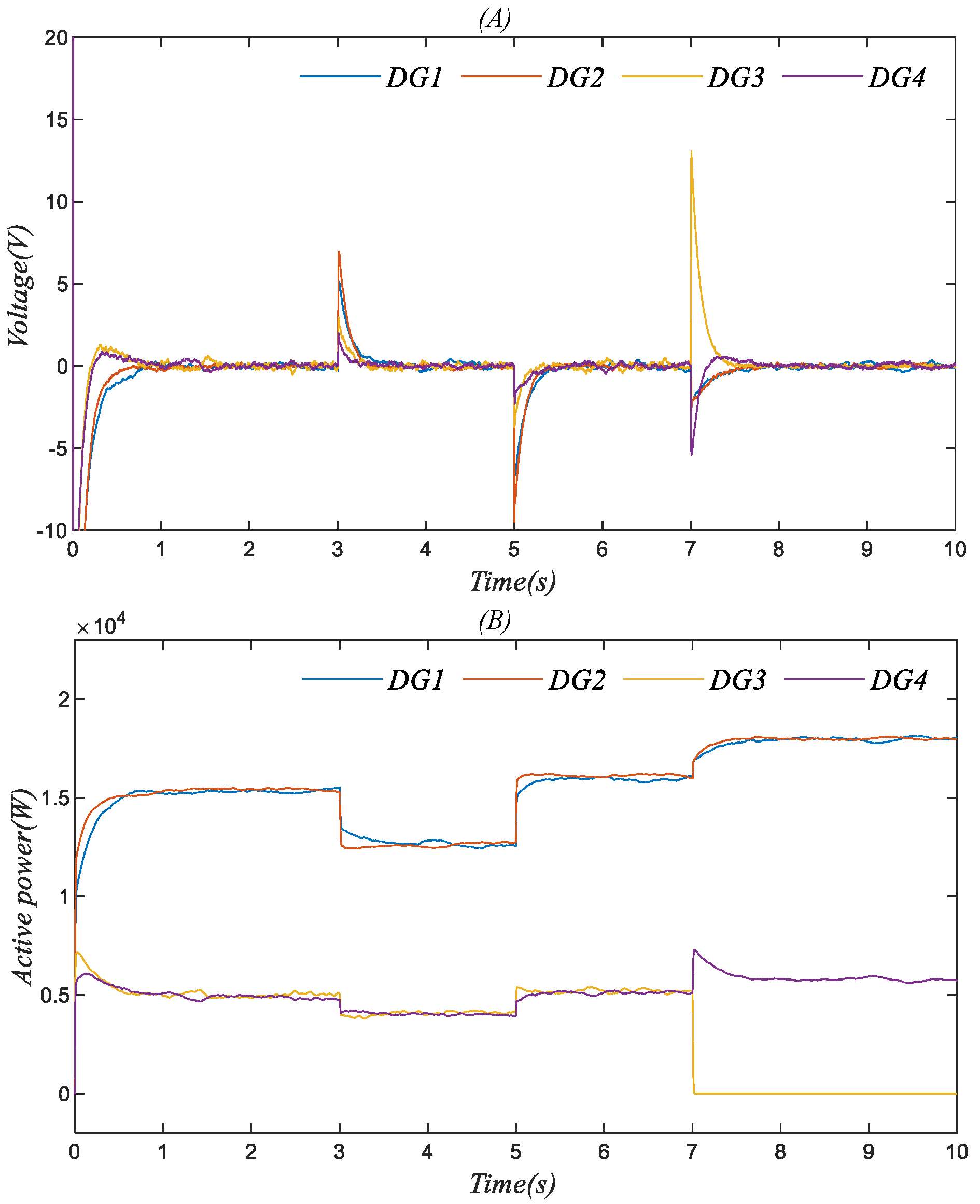
4.3. Case 3: The Effectiveness of the Containment-Based Distributed Secondary Control Strategy under General Noise
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Xie, P.L.; Guerrero, J.M.; Tan, S.; Bazmohammadi, N.; Vasquez, J.C.; Mehrzadi, M.; Al-Turki, Y. Optimization-Based Power and Energy Management System in Shipboard Microgrid: A Review. IEEE Syst. J. 2022, 16, 578–590. [Google Scholar] [CrossRef]
- Nivolianiti, E.; Karnavas, Y.L.; Charpentier, J.F. Energy management of shipboard microgrids integrating energy storage systems: A review. Renew. Sustain. Energy Rev. 2024, 189, 114012. [Google Scholar] [CrossRef]
- Atilhan, S.; Park, S.; El-Halwagi, M.M.; Atilhan, M.; Moore, M.; Nielsen, R.B. Green hydrogen as an alternative fuel for the shipping industry. Curr. Opin. Chem. Eng. 2021, 31, 100668. [Google Scholar] [CrossRef]
- Fan, A.; Yan, J.; Xiong, Y.; Shu, Y.; Fan, X.; Wang, Y.; He, Y.; Chen, J. Characteristics of real-world ship energy consumption and emissions based on onboard testing. Mar. Pollut. Bull. 2023, 194, 115411. [Google Scholar] [CrossRef] [PubMed]
- Shu, Y.; Hu, A.; Zheng, Y.; Gan, L.; Xiao, G.; Zhou, C.; Song, L. Evaluation of ship emission intensity and the inaccuracy of exhaust emission estimation model. Ocean Eng. 2023, 287, 115723. [Google Scholar] [CrossRef]
- Xiao, Z.X.; Li, H.M.; Fang, H.W.; Guan, Y.Z.; Liu, T.; Hou, L.; Guerrero, J.M. Operation Control for Improving Energy Efficiency of Shipboard Microgrid Including Bow Thrusters and Hybrid Energy Storages. IEEE Trans. Transp. Electrif. 2020, 6, 856–868. [Google Scholar] [CrossRef]
- Zeng, Y.J.; Zhang, Q.J.; Liu, Y.C.; Zhuang, X.Z.; Lv, X.; Wang, H.L. An Improved Distributed Secondary Control Strategy for Battery Storage System in DC Shipboard Microgrid. IEEE Trans. Ind. Appl. 2022, 58, 4062–4075. [Google Scholar] [CrossRef]
- Xu, L.N.; Guerrero, J.M.; Lashab, A.; Wei, B.Z.; Bazmohammadi, N.; Vasquez, J.C.; Abusorrah, A. A Review of DC Shipboard MicrogridsuPart II: Control Architectures, Stability Analysis, and Protection Schemes. IEEE Trans. Power Electron. 2022, 37, 4105–4120. [Google Scholar] [CrossRef]
- Liao, W.Q.; Dong, X.; Yang, R.F.; Qiao, Z.F. Control Optimization Method for Ship Direct Current Microgrid Based on Impedance Reshaping. J. Mar. Sci. Eng. 2024, 12, 503. [Google Scholar] [CrossRef]
- Lin, A.N.; Wen, S.L.; Zhu, M.; Cai, X.C. Risk-Aware Coordination of Logistics Scheduling and Energy Management for Maritime Mobile Microgrid Clusters. IEEE Trans. Intell. Veh. 2024, 9, 752–763. [Google Scholar] [CrossRef]
- Zeng, Y.J.; Zhang, Q.J.; Liu, Y.C.; Zhuang, X.Z.; Che, L.; Niu, M.; Zheng, X.L. State-of-charge dynamic balancing strategy for distributed energy storage system in DC shipboard microgrid. Int. J. Electr. Power Energy Syst. 2021, 133, 107094. [Google Scholar] [CrossRef]
- Bidram, A.; Lewis, F.L.; Davoudi, A. Distributed Control Systems for Small-Scale Power Networks Using Multiagent Cooperative Control Theory. IEEE Control Syst. Mag. 2014, 34, 56–77. [Google Scholar]
- Pătru, E.N.; Crăciun, P.; Tanasiev, V.; Quan, D.M.; Chau, L.X. Real-time collection of the functional parameters for a passive house. Tạp chí Khoa học và Công nghệa-Dại học Đà Nẵng 2024, 22, 67–72. [Google Scholar]
- Kumar, N.; Panda, S.K. A Multipurpose and Power Quality Improved Electric Vessels Charging Station for the Seaports. IEEE Trans. Ind. Inform. 2023, 19, 3254–3261. [Google Scholar] [CrossRef]
- Qian, T.; Liu, Y.; Zhang, W.H.; Tang, W.H.; Shahidehpour, M. Event-Triggered Updating Method in Centralized and Distributed Secondary Controls for Islanded Microgrid Restoration. IEEE Trans. Smart Grid. 2020, 11, 1387–1395. [Google Scholar] [CrossRef]
- Yan, R.D.; Wang, Y.; Xu, Y.; Dai, J.H. A Multiagent Quantum Deep Reinforcement Learning Method for Distributed Frequency Control of Islanded Microgrids. IEEE Trans. Control Netw. Syst. 2022, 9, 1622–1632. [Google Scholar] [CrossRef]
- Li, X.W.; Sun, Z.Y.; Tang, Y.; Karimi, H.R. Adaptive Event-Triggered Consensus of Multiagent Systems on Directed Graphs. IEEE Trans. Autom. Control 2021, 66, 1670–1685. [Google Scholar] [CrossRef]
- Fan, B.; Peng, J.K.; Duan, J.J.; Yang, Q.M.; Liu, W.X. Distributed Control of Multiple-Bus Microgrid with Paralleled Distributed Generators. IEEE-Caa J. Autom. Sin. 2019, 6, 676–684. [Google Scholar] [CrossRef]
- Su, Y.; Shan, Q.; Li, T.; Zhang, H. Prescribed-Time Optimal Resilient Consensus Control for Nonlinear Uncertain Multiagent Systems. IEEE Trans. Syst. Man Cybern. Syst. 2024, early access. 1–14. [Google Scholar] [CrossRef]
- Wang, F.Z.; Teng, F.; Xiao, G.Y.; He, Y.H.; Feng, Q. Resilient Distributed Secondary Control Strategy for Polymorphic Seaport Microgrid against Estimation-Dependent FDI Attacks. J. Mar. Sci. Eng. 2022, 10, 1668. [Google Scholar] [CrossRef]
- Yu, Y.; Liu, G.P.; Huang, Y.; Guerrero, J.M. Coordinated Predictive Secondary Control for DC Microgrids Based on High-Order Fully Actuated System Approaches. IEEE Trans. Smart Grid. 2024, 15, 19–33. [Google Scholar] [CrossRef]
- Lou, Y.C.; Hong, Y.G. Target containment control of multi-agent systems with random switching interconnection topologies. Automatica 2012, 48, 879–885. [Google Scholar] [CrossRef]
- Li, W.; Xie, L.; Zhang, J.F. Containment control of leader-following multi-agent systems with Markovian switching network topologies and measurement noises. Automatica 2015, 51, 263–267. [Google Scholar] [CrossRef]
- Carrasco, J.; Heath, W.P.; Lanzon, A. Equivalence between classes of multipliers for slope-restricted nonlinearities. Automatica 2013, 49, 1732–1740. [Google Scholar] [CrossRef]
- Ye, P.Y.; Shan, Q.H.; Li, T.S.; Chen, C. Practical time-varying formation-containment tracking for nonlinear multi-agent systems with general noise. J. Frankl. Inst.-Eng. Appl. Math. 2024, 361, 106822. [Google Scholar] [CrossRef]
- Zhai, M.A.; Sun, Q.Y.; Wang, R.; Zhang, H.G. Containment-Based Multiple PCC Voltage Regulation Strategy for Communication Link and Sensor Faults. IEEE-CAA J. Autom. Sin. 2023, 10, 2045–2055. [Google Scholar] [CrossRef]
- Zuo, S.; Yue, D. Resilient Containment of Multigroup Systems against Unknown Unbounded FDI Attacks. IEEE Trans. Ind. Electron. 2022, 69, 2864–2873. [Google Scholar] [CrossRef]
- Yuan, Y.P.; Wang, J.X.; Yan, X.P.; Shen, B.Y.; Long, T. A review of multi-energy hybrid power system for ships. Renew. Sust. Energ. Rev. 2020, 132, 110081. [Google Scholar] [CrossRef]
- Aboelezz, A.M.; El-Saadawi, M.M.; Eladl, A.A.; Sedhom, B.E. IEC 61850 Communication-Based Pilot Distance Protective IED for Fault Detection and Location in DC Zonal Shipboard Microgrid. IEEE Trans. Ind. Appl. 2023, 59, 5559–5569. [Google Scholar] [CrossRef]
- Gnacinski, P.; Tarasiuk, T.; Mindykowski, J.; Peplinski, M.; Górniak, M.; Hallmann, D.; Pillat, A. Power Quality and Energy-Efficient Operation of Marine Induction Motors. IEEE Access 2020, 8, 152193–152203. [Google Scholar] [CrossRef]
- Zhang, H.G.; Teng, F.; Sun, Q.Y.; Shan, Q.H. Distributed Optimization Based on a Multiagent System Disturbed by General Noise. IEEE Trans. Cybern. 2019, 49, 3209–3213. [Google Scholar] [CrossRef] [PubMed]
- Wu, Z.J. Stability Criteria of Random Nonlinear Systems and Their Applications. IEEE Trans. Autom. Control 2015, 60, 1038–1049. [Google Scholar] [CrossRef]
- Lai, J.G.; Lu, X.Q.; Dong, Z.Y.; Cheng, S.J. Resilient Distributed Multiagent Control for AC Microgrid Networks Subject to Disturbances. IEEE Trans. Syst. Man Cybern.-Syst. 2022, 52, 43–53. [Google Scholar] [CrossRef]
- Teng, F.; Ban, Z.; Li, T.; Sun, Q.; Li, Y. A Privacy-Preserving Distributed Economic Dispatch Method for Integrated Port Microgrid and Computing Power Network. IEEE Trans. Ind. Inform. 2024, 20, 10103–10112. [Google Scholar] [CrossRef]
- Fang, S.; Xu, Y.; Li, Z.; Zhao, T.; Wang, H. Two-Step Multi-Objective Management of Hybrid Energy Storage System in All-Electric Ship Microgrids. IEEE Trans. Veh. Technol. 2019, 68, 3361–3373. [Google Scholar] [CrossRef]
- Wang, Y.; Cheng, L.; Hou, Z.G.; Tan, M.; Wang, M. Containment control of multi-agent systems in a noisy communication environment. Automatica 2014, 50, 1922–1928. [Google Scholar] [CrossRef]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbol | Parameters |
|---|---|
| DG1, DG2 | 20 KW |
| DG3, DG4 | 8 KW |
| Lines | R = 0.25 , L = 0.0035 H |
| 50 Hz | |
| 380 V | |
| 0.1 | |
| 0.023 H | |
| 0.0004 F | |
| 0.03 | |
| 0.005 H |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, L.; Teng, F.; Xu, Q. Containment-Based Distributed Secondary Control for AC Shipboard Microgrids under General Noise. J. Mar. Sci. Eng. 2024, 12, 1438. https://doi.org/10.3390/jmse12081438
Wang L, Teng F, Xu Q. Containment-Based Distributed Secondary Control for AC Shipboard Microgrids under General Noise. Journal of Marine Science and Engineering. 2024; 12(8):1438. https://doi.org/10.3390/jmse12081438
Chicago/Turabian StyleWang, Liangbin, Fei Teng, and Qi Xu. 2024. "Containment-Based Distributed Secondary Control for AC Shipboard Microgrids under General Noise" Journal of Marine Science and Engineering 12, no. 8: 1438. https://doi.org/10.3390/jmse12081438
APA StyleWang, L., Teng, F., & Xu, Q. (2024). Containment-Based Distributed Secondary Control for AC Shipboard Microgrids under General Noise. Journal of Marine Science and Engineering, 12(8), 1438. https://doi.org/10.3390/jmse12081438