

Research and Application of Panoramic Visual Perception-Assisted Navigation Technology for Ships
 ,
,
Abstract
1. Introduction
2. Construction of Ship Panoramic Vision Mosaic Algorithm
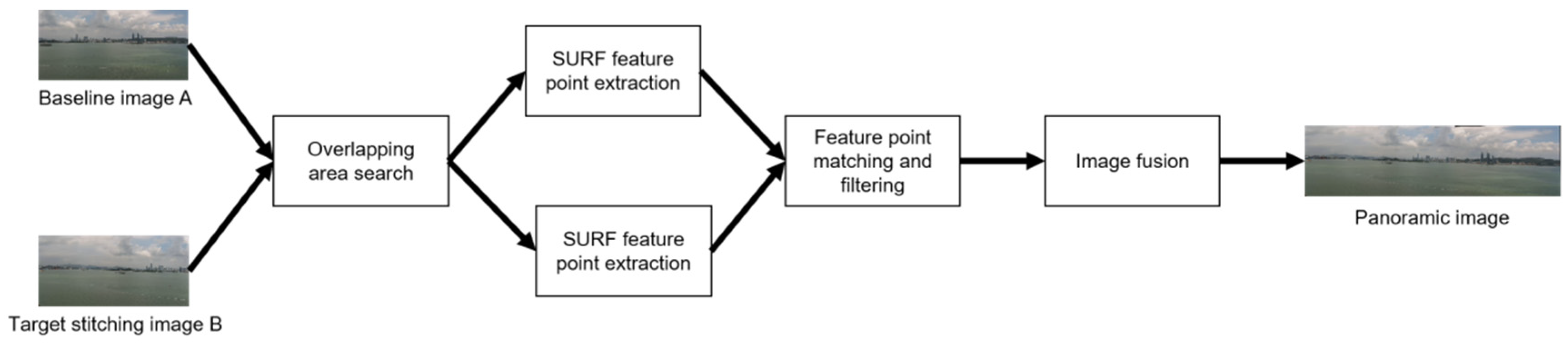
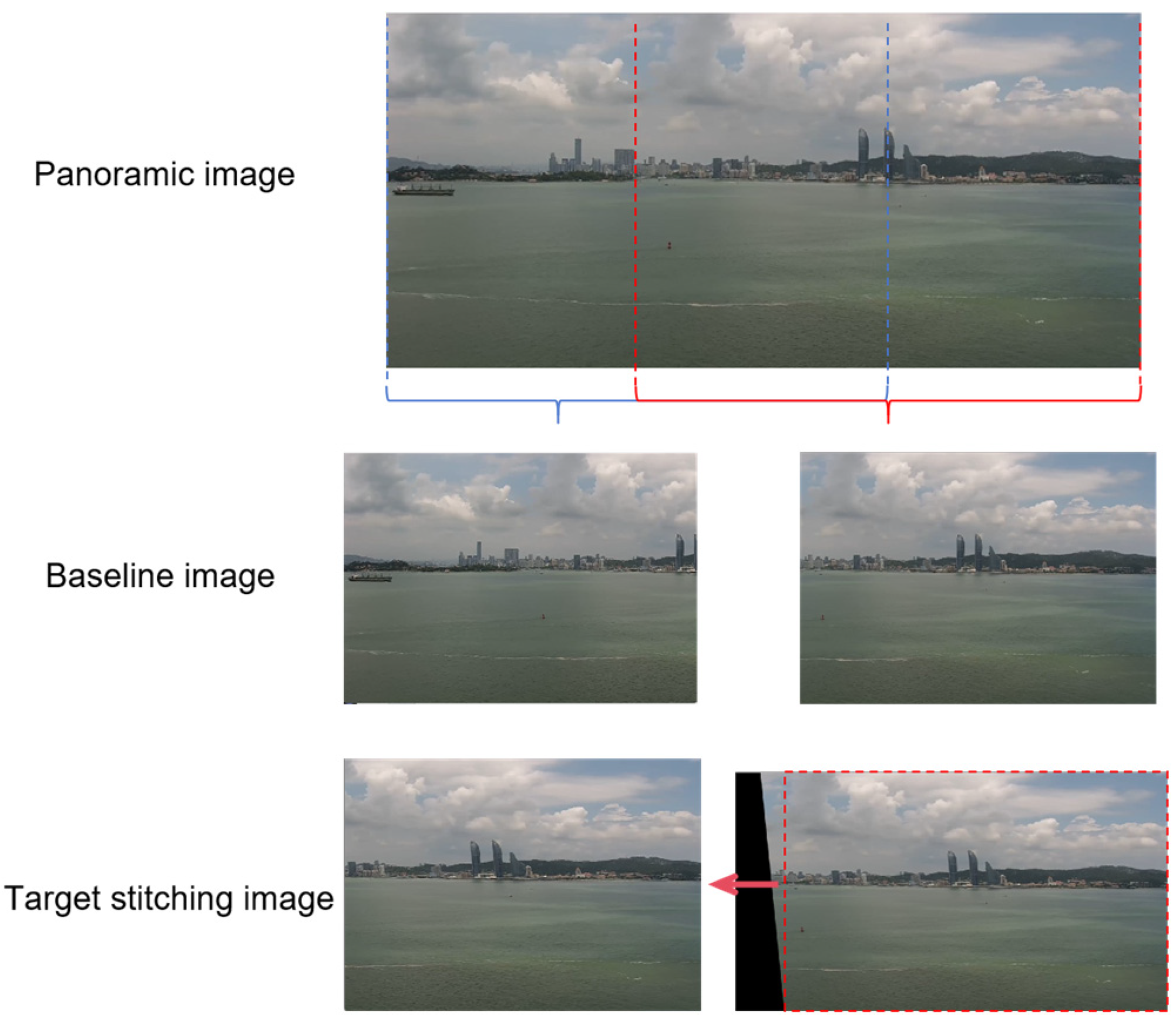
2.1. Panoramic Image Stitching Method
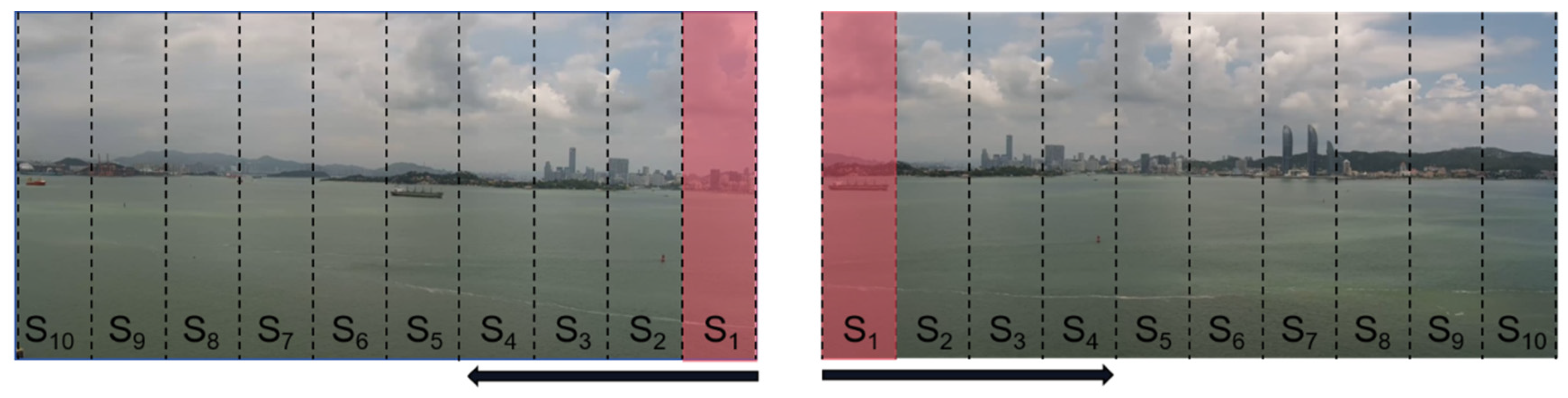
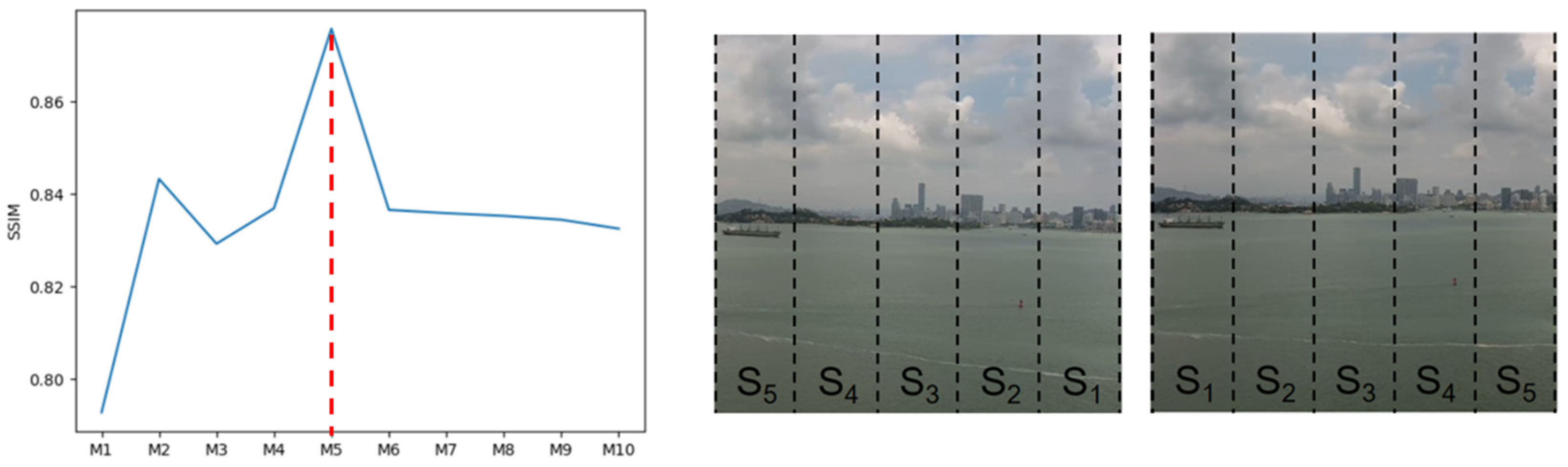
2.1.1. The Region-of-Interest Search Method Based on SSIM
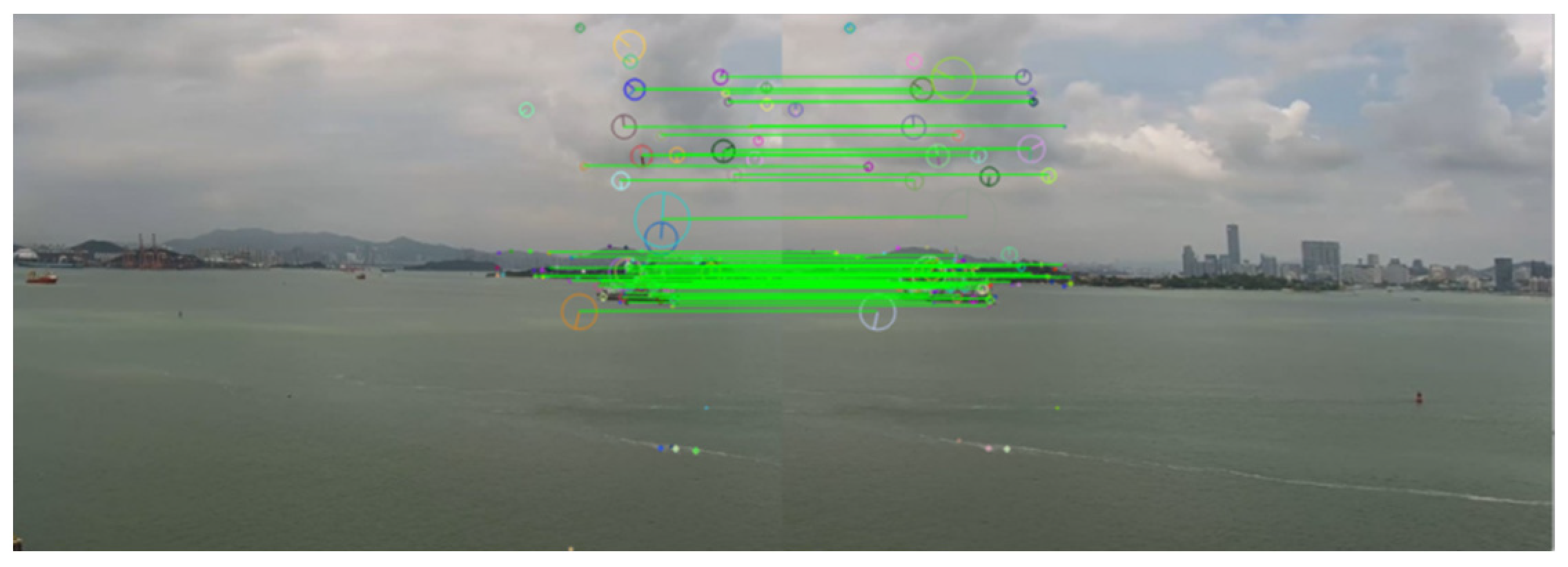
2.1.2. Feature Point Extraction and Matching
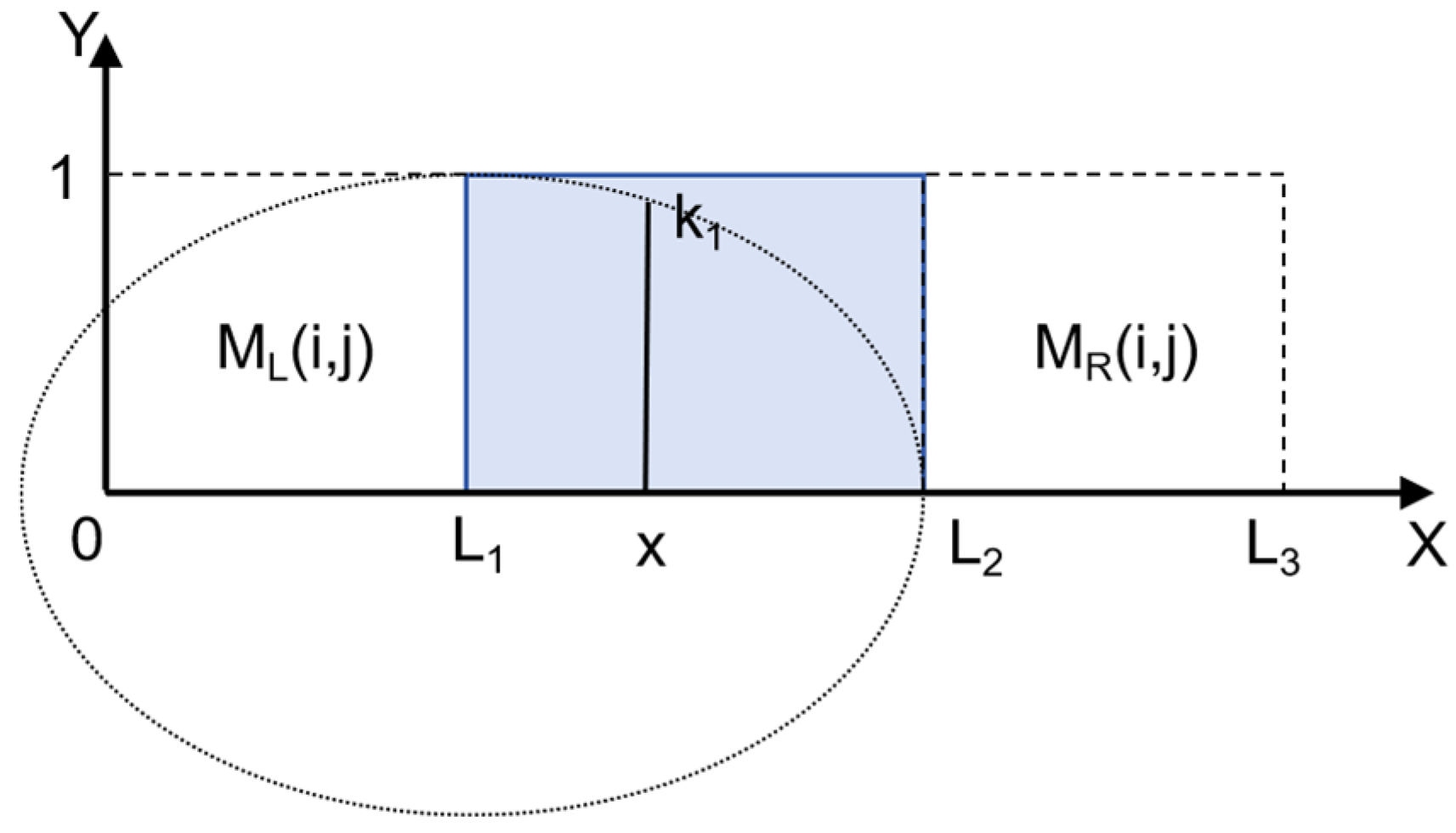
2.1.3. Image Fusion Based on Elliptic Function Weighting
2.2. Validation of Ship Panoramic Image Stitching Algorithm
2.2.1. Test Dataset
2.2.2. Verification Results
Comparison of Theoretical Data
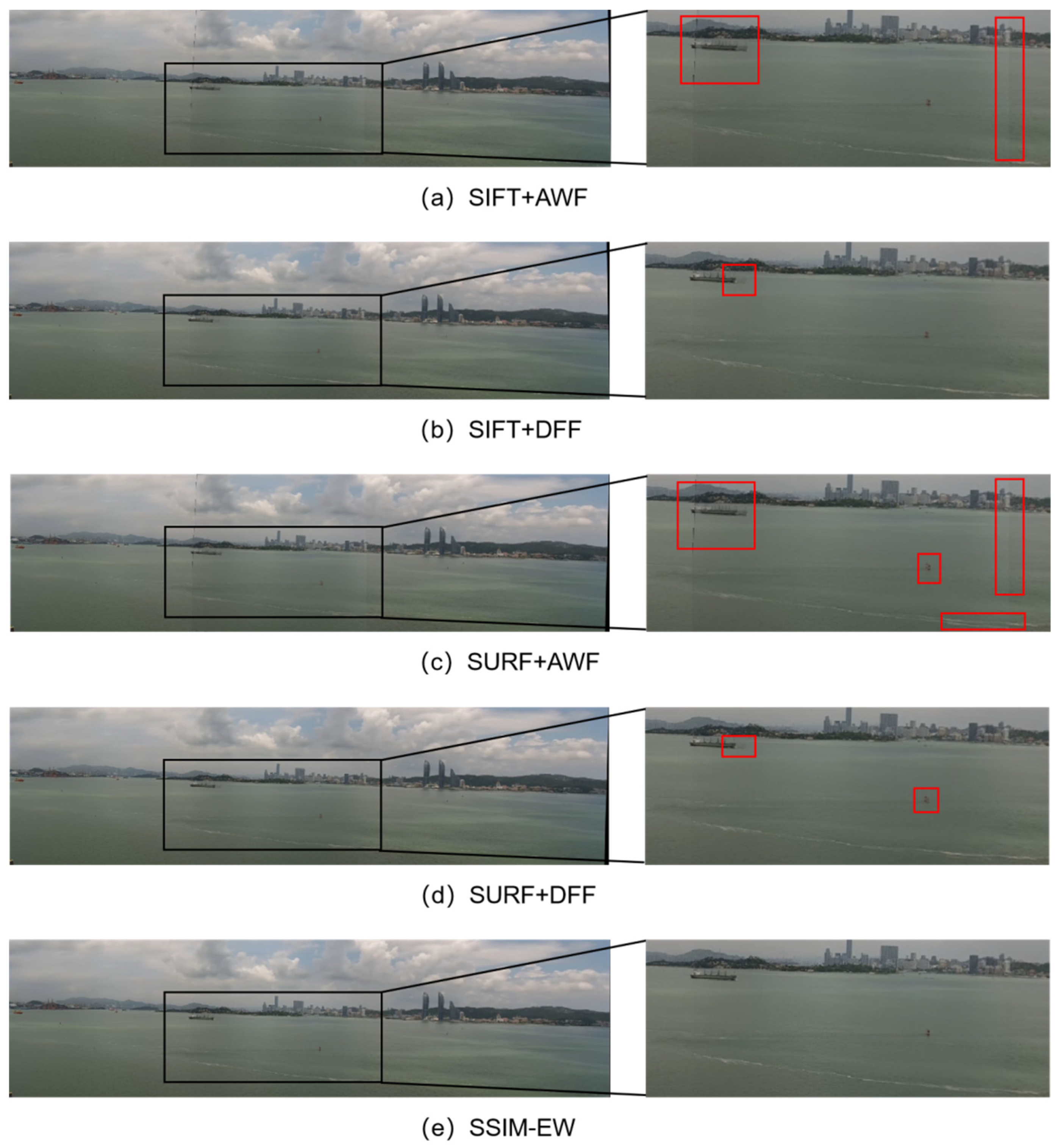
Comparison of Fused Images
3. Construction of Ship Navigation Target Perception Model Based on YOLOv8
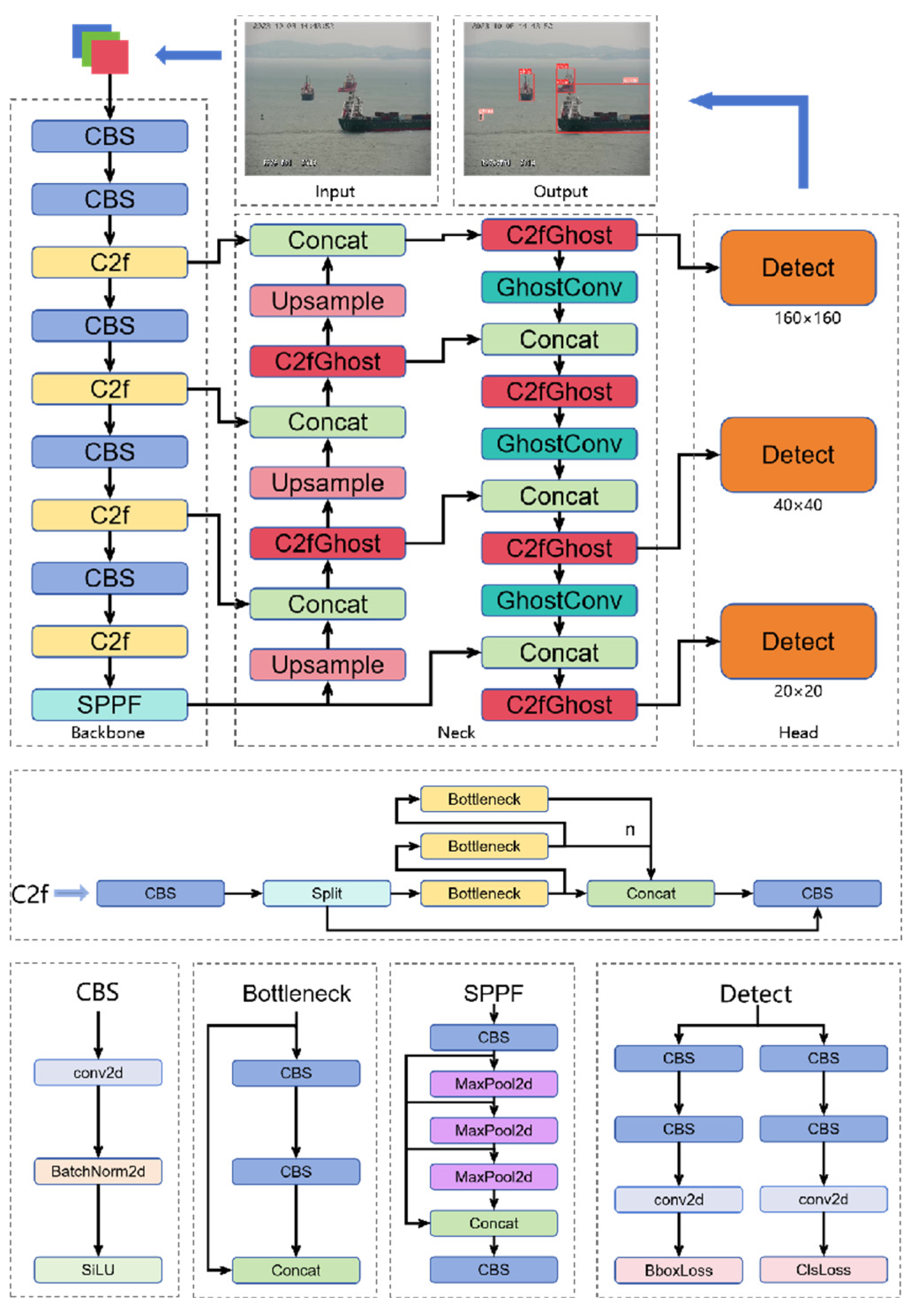
3.1. Model Architecture
3.2. Model Network Optimization
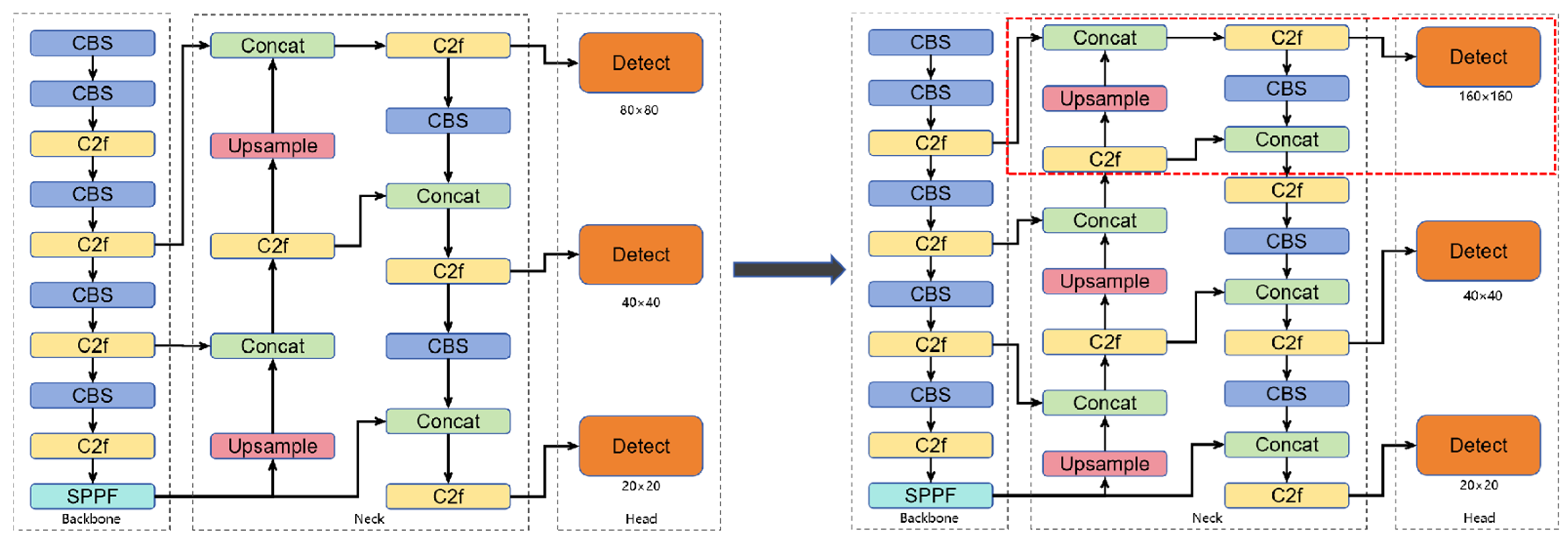
3.2.1. Increased Detection Head Size
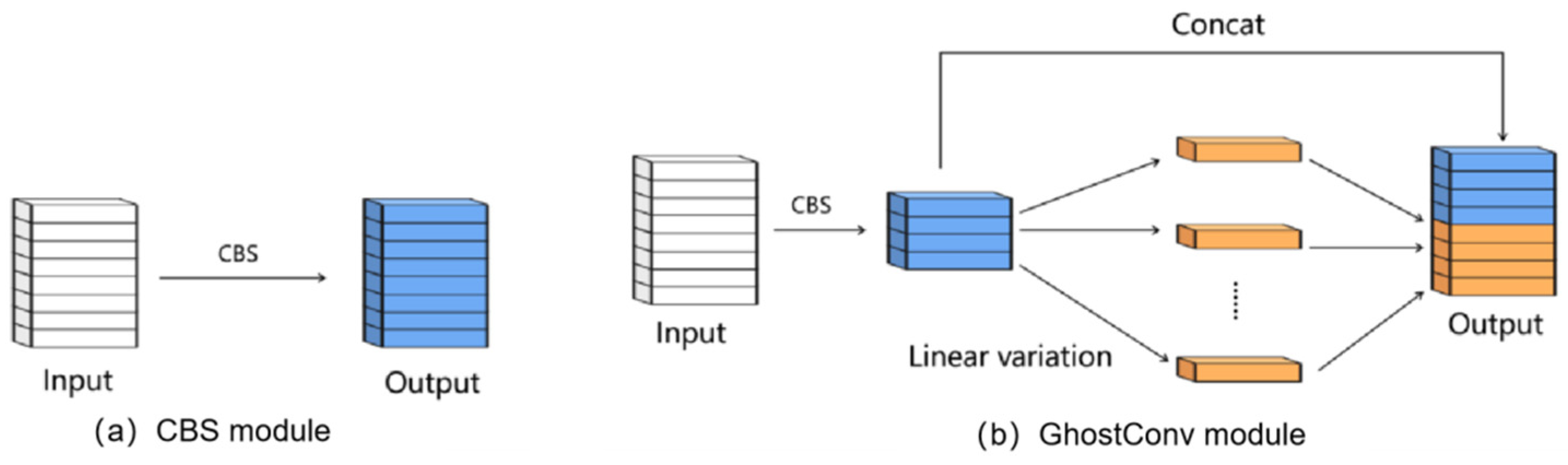
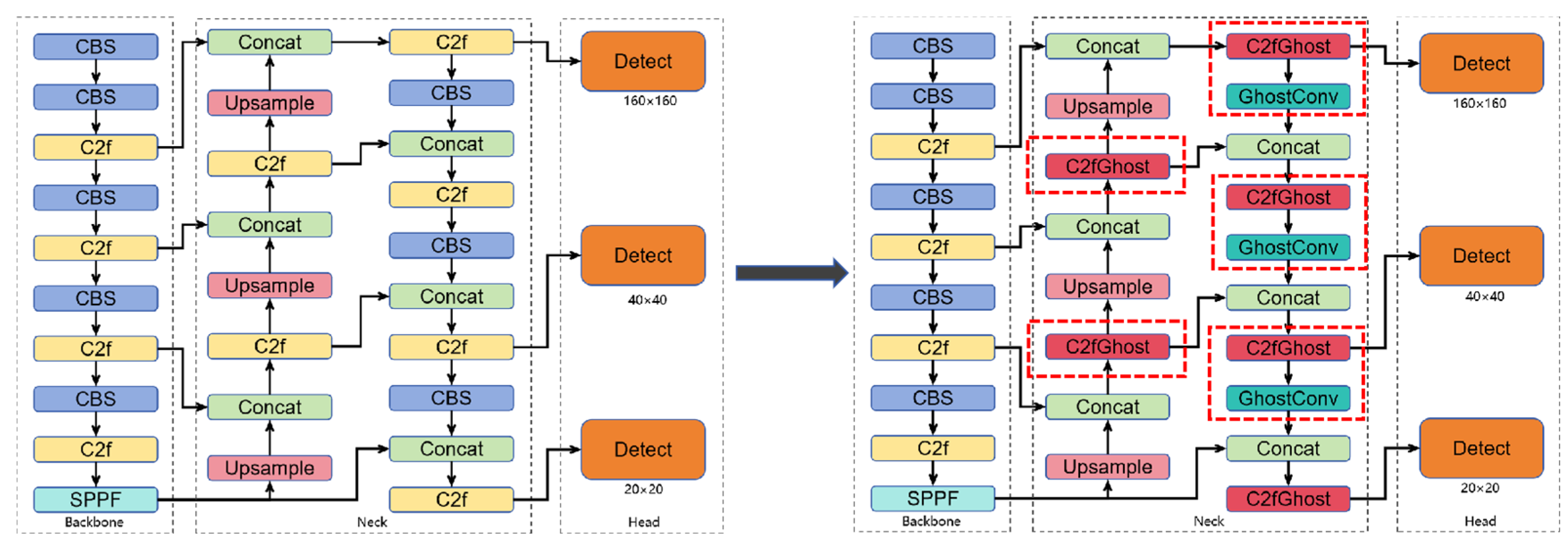
3.2.2. Introduction of GhostNet
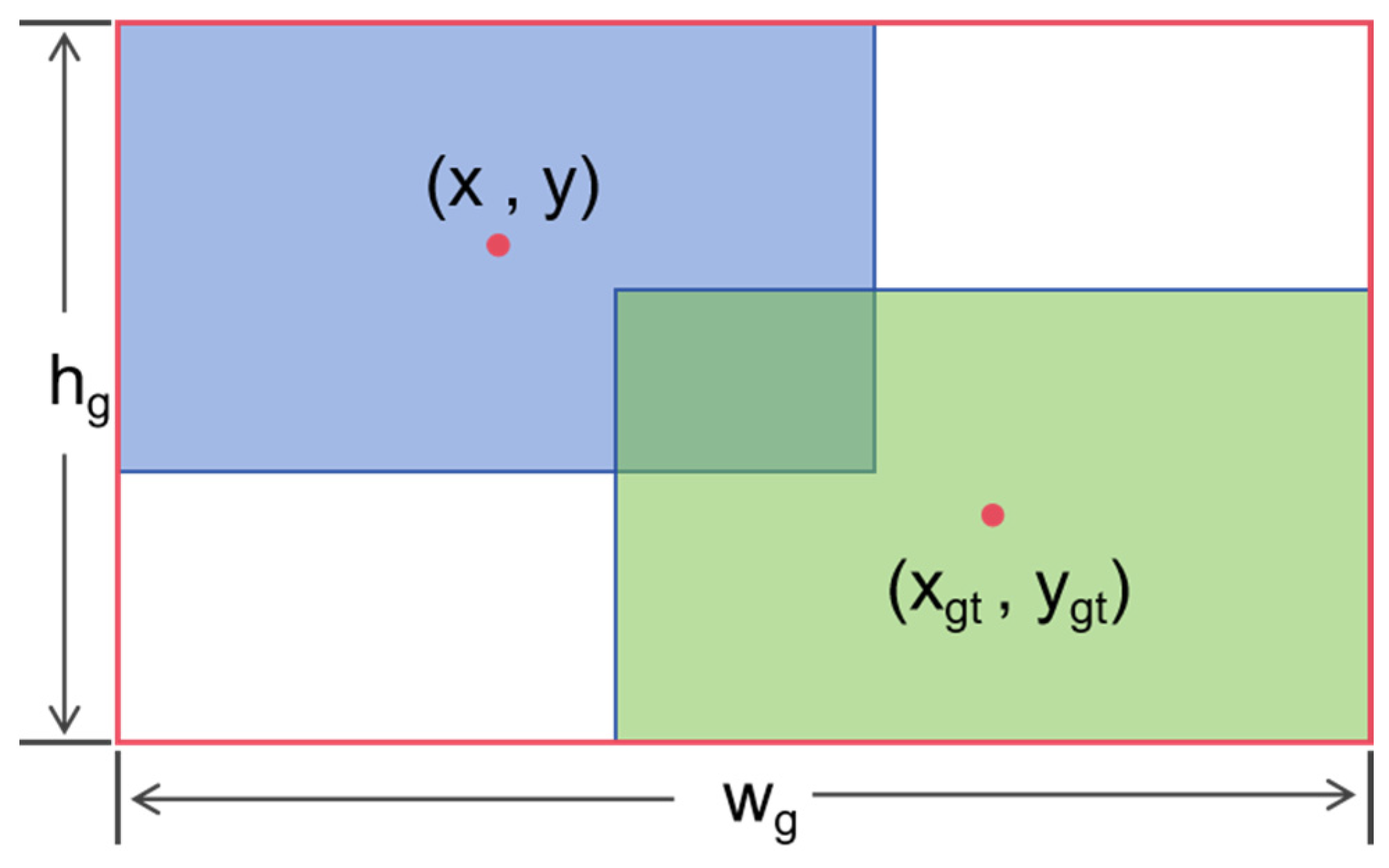
3.3. Improvement of Regression Loss Function
3.4. Verification of Perceptual Models
3.4.1. Experimental Dataset
3.4.2. Experiment
4. Application Verification of Tugboat Panoramic Visual Perception-Assisted Navigation
4.1. Construction of Application Platform
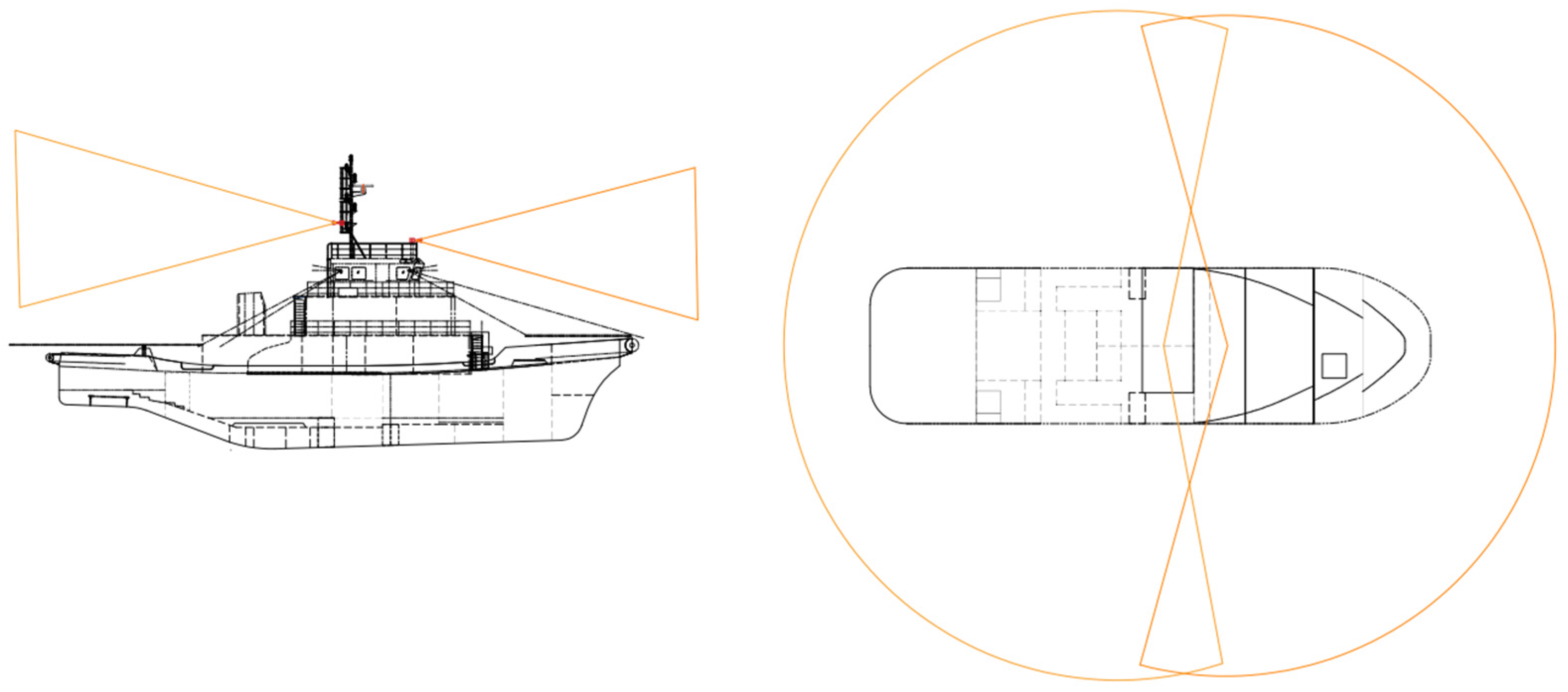
4.2. Deployment of Relevant Equipment
4.3. Conversion of Different Data Coordinate Systems
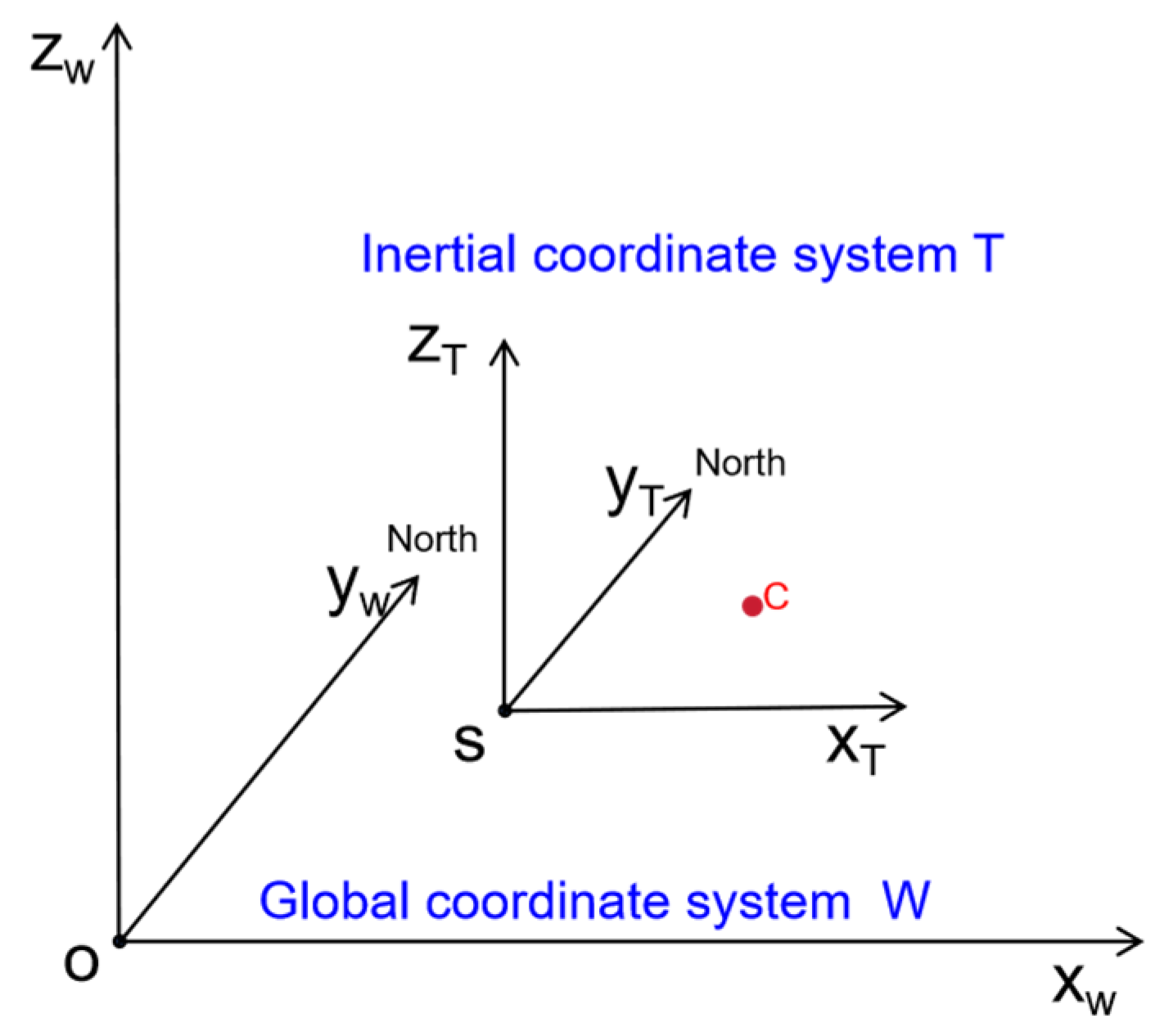
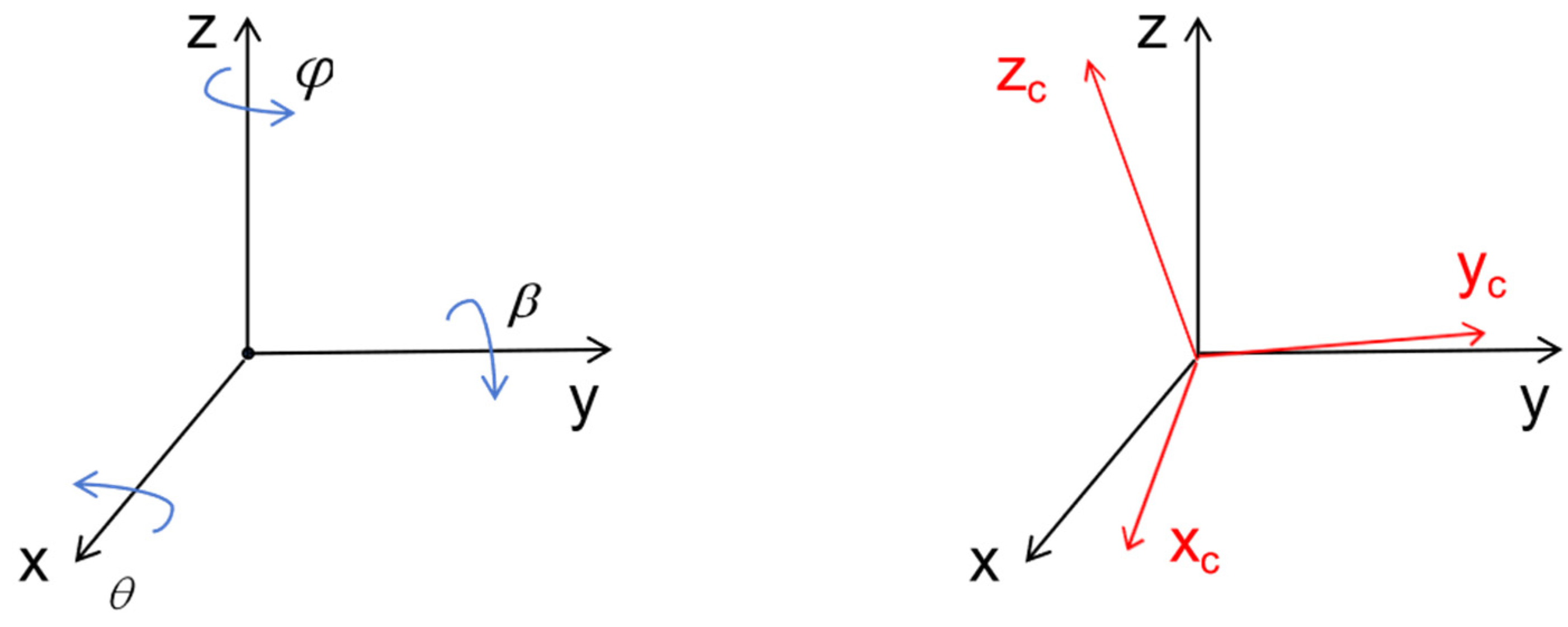
4.3.1. Global Coordinate System and Inertial Coordinate System
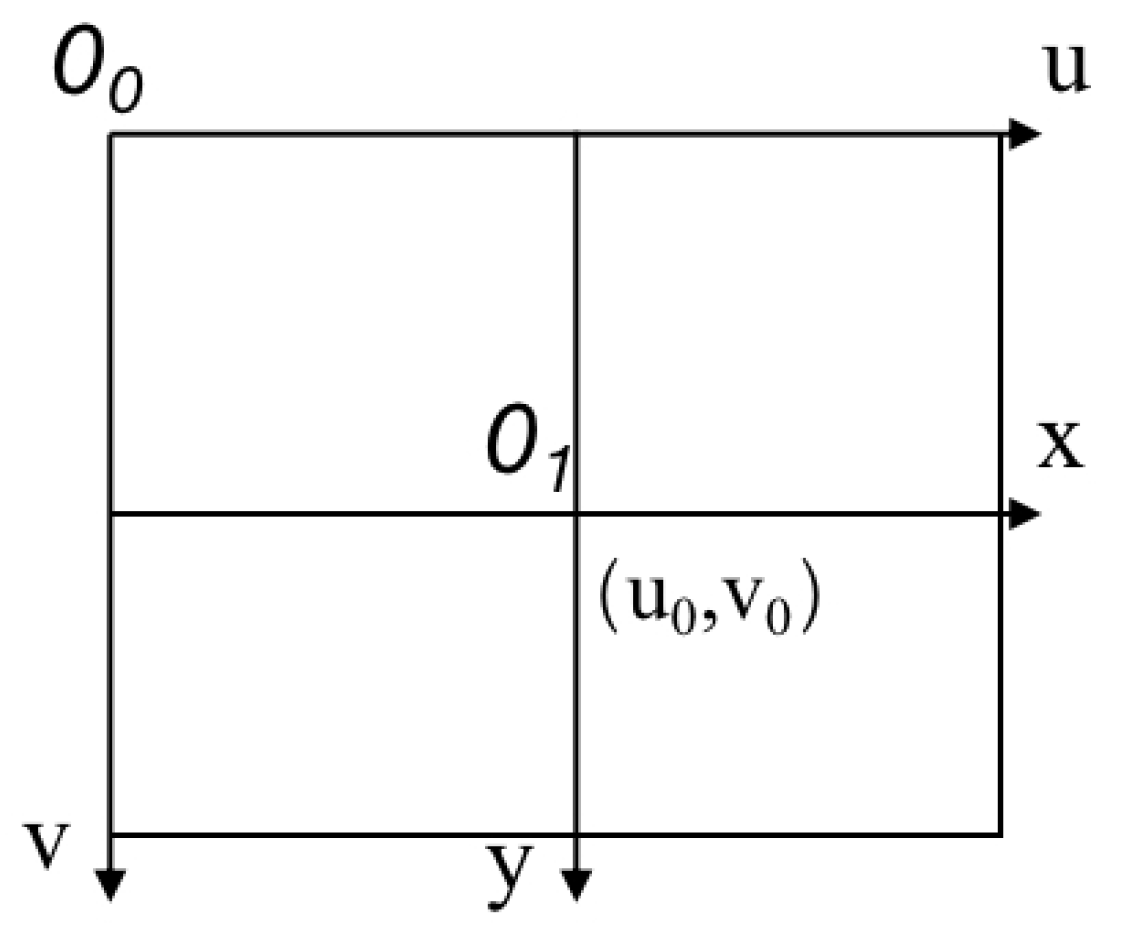
4.3.2. Conversion of the Global Coordinate System and the Pixel Coordinate System
4.4. Application of Visual Assistance for Perception
4.4.1. Panoramic Vision-Aided Operation
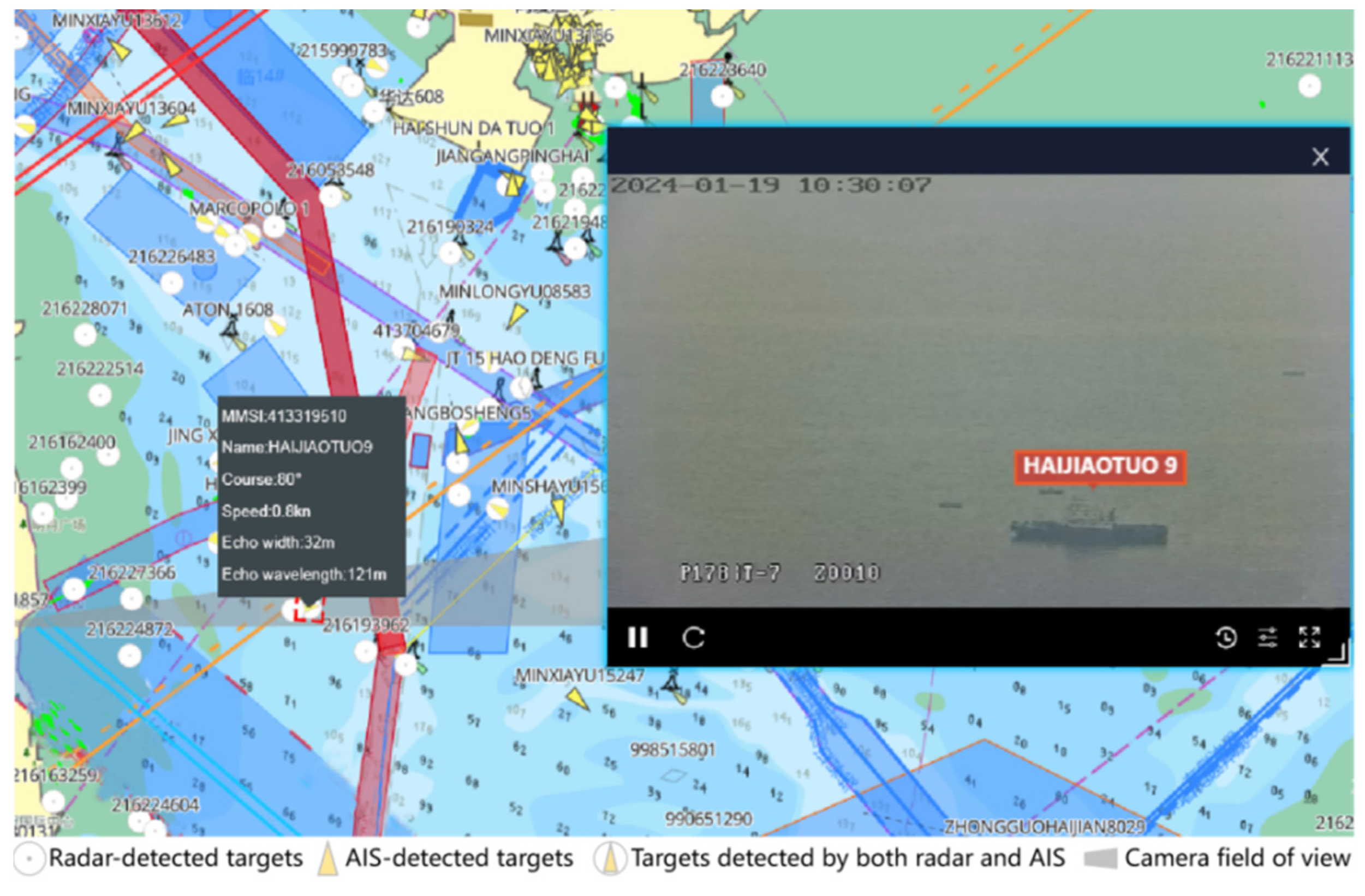
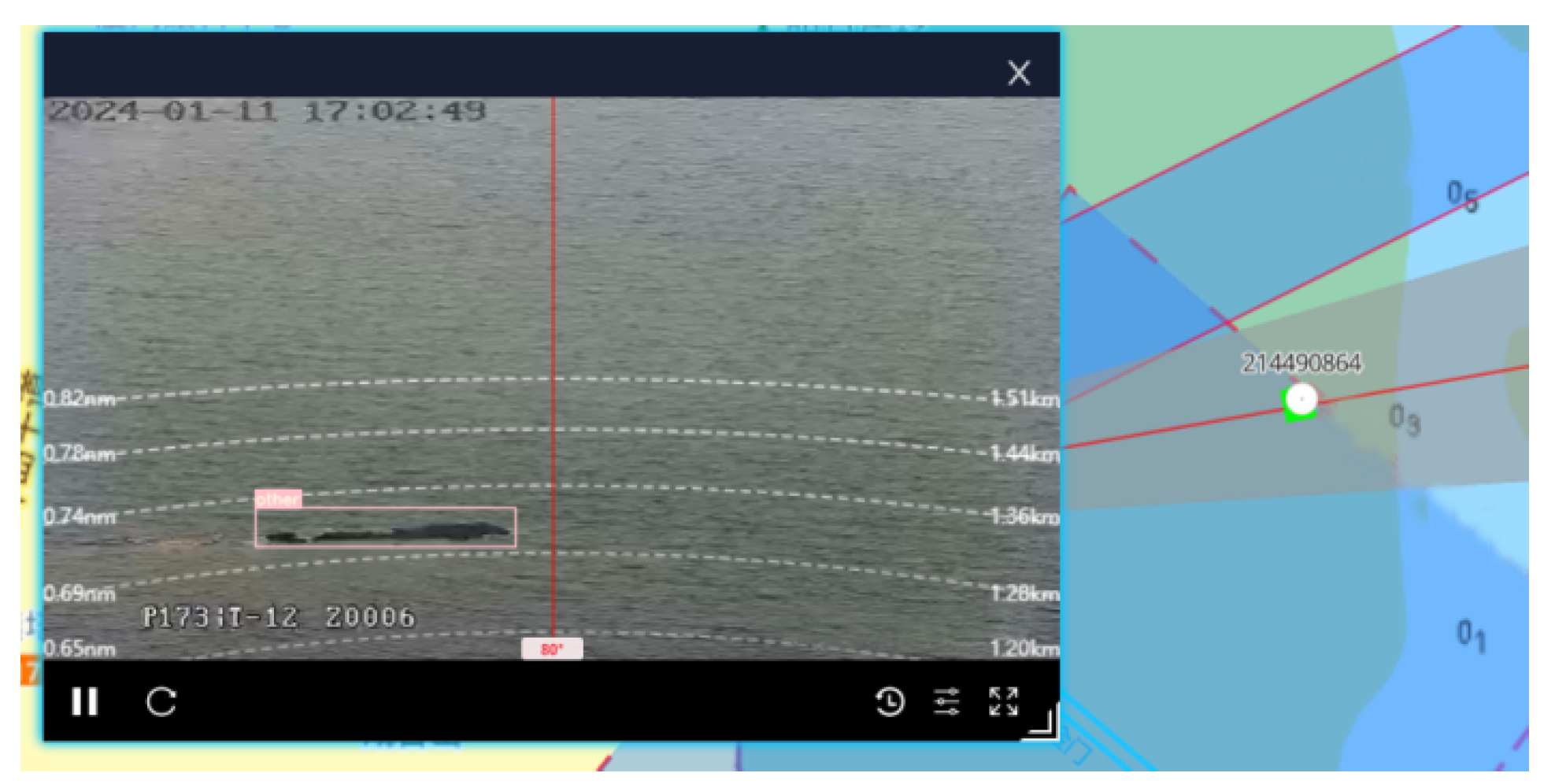
4.4.2. Visual Assistance for Perception
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Sèbe, M.; Scemama, P.; Choquet, A.; Jung, J.L.; Chircop, A.; Razouk, P.M.A.; Michel, S.; Stiger-Pouvreau, V.; Recuero-Virto, L. Maritime transportation: Let’s slow down a bit. Sci. Total Environ. 2022, 811, 152262. [Google Scholar] [CrossRef] [PubMed]
- Li, H. Research on Digital, Networked and Intelligent Manufacturing of Modern Ship. J. Phys. Conf. Ser. 2020, 1634, 012052. [Google Scholar] [CrossRef]
- Yang, D.; Solihin, M.I.; Zhao, Y.; Yao, B.; Chen, C.; Cai, B.; Machmudah, A. A review of intelligent ship marine object detection based on RGB camera. IET Image Proc. 2024, 18, 281–297. [Google Scholar] [CrossRef]
- Qu, J.; Liu, R.W.; Guo, Y.; Lu, Y.; Su, J.; Li, P. Improving maritime traffic surveillance in inland waterways using the robust fusion of AIS and visual data. Ocean Eng. 2023, 275, 114198. [Google Scholar] [CrossRef]
- Chen, Z.; Chen, D.; Zhang, Y.; Cheng, X.; Zhang, M.; Wu, C. Deep learning for autonomous ship-oriented small ship detection. Saf. Sci. 2020, 130, 104812. [Google Scholar] [CrossRef]
- Faggioni, N.; Ponzini, F.; Martelli, M. Multi-obstacle detection and tracking algorithms for the marine environment based on unsupervised learning. Ocean Eng. 2022, 266, 113034. [Google Scholar] [CrossRef]
- Zhu, Q.; Ma, K.; Wang, Z.; Shi, P.B. YOLOv7-CSAW for maritime target detection. Front. Neurorob. 2023, 17, 1210470. [Google Scholar] [CrossRef] [PubMed]
- Cheng, S.; Zhu, Y.; Wu, S. Deep learning based efficient ship detection from drone-captured images for maritime surveillance. Ocean Eng. 2023, 285, 115440. [Google Scholar] [CrossRef]
- Adolphi, C.; Parry, D.D.; Li, Y.; Sosonkina, M.; Saglam, A.; Papelis, Y.E. LiDAR Buoy Detection for Autonomous Marine Vessel Using Pointnet Classification. In Proceedings of the Modeling, Simulation and Visualization Student Capstone Conference, Suffolk, VA, USA, 20 April 2023. [Google Scholar]
- Hagen, I.B.; Brekke, E. In Kayak Tracking using a Direct Lidar Model. In Proceedings of the Global Oceans 2020: Singapore-US Gulf Coast, Biloxi, MS, USA, 5–30 October 2020; pp. 1–7. [Google Scholar]
- Abbadi, N.K.E.L.; Al Hassani, S.A.; Abdulkhaleq, A.H. A Review Over Panoramic Image Stitching Techniques. J. Phys. Conf. Ser. 2021, 1999, 012115. [Google Scholar] [CrossRef]
- Zhang, J.; Liu, T.; Yin, X.; Wang, X.; Zhang, K.; Xu, J.; Wang, D. An improved parking space recognition algorithm based on panoramic vision. Multimed. Tools Appl. 2021, 80, 18181–18209. [Google Scholar] [CrossRef]
- Kinzig, C.; Cortés, I.; Fernández, C.; Lauer, M. Real-time seamless image stitching in autonomous driving. In Proceedings of the 2022 25th International Conference on Information Fusion (FUSION), Linköping, Sweden, 4–7 July 2022; pp. 1–8. [Google Scholar]
- Zhu, H.; Yuen, K.V.; Mihaylova, L.; Leung, H. Overview of Environment Perception for Intelligent Vehicles. IEEE Trans. Intell. Transp. Syst. 2017, 18, 2584–2601. [Google Scholar] [CrossRef]
- Taha, A.E.; AbuAli, N. Route Planning Considerations for Autonomous Vehicles. IEEE Commun. Mag. 2018, 56, 78–84. [Google Scholar] [CrossRef]
- Martelli, M.; Virdis, A.; Gotta, A.; Cassarà, P.; Summa, M.D. An Outlook on the Future Marine Traffic Management System for Autonomous Ships. IEEE Access 2021, 9, 157316–157328. [Google Scholar] [CrossRef]
- Wang, Z.; Yang, Z. Review on image-stitching techniques. Multimed. Syst. 2020, 26, 413–430. [Google Scholar] [CrossRef]
- Wei, X.; Yan, W.; Zheng, Q.; Gu, M.; Su, K.; Yue, G.; Liu, Y. Image Redundancy Filtering for Panorama Stitching. IEEE Access 2020, 8, 209113–209126. [Google Scholar] [CrossRef]
- Chang, C.-H.; Sato, Y.; Chuang, Y.-Y. Shape-preserving half-projective warps for image stitching. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Columbus, OH, USA, 23–28 June 2014; pp. 3254–3261. [Google Scholar]
- Wang, G.; Liu, L.; Zhang, Y. Research on Scalable Real-Time Image Mosaic Technology Based on Improved SURF. J. Phys. Conf. Ser. 2018, 1069, 012162. [Google Scholar] [CrossRef]
- Bakurov, I.; Buzzelli, M.; Schettini, R.; Castelli, M.; Vanneschi, L. Structural similarity index (SSIM) revisited: A data-driven approach. Expert Syst. Appl. 2022, 189, 116087. [Google Scholar] [CrossRef]
- Fischler, M.A.; Bolles, R.C. Random sample consensus: A paradigm for model fitting with applications to image analysis and automated cartography. Commun. ACM 1981, 24, 381–395. [Google Scholar] [CrossRef]
- Lowe, D.G. Distinctive Image Features from Scale-Invariant Keypoints. Int. J. Comput. Vis. 2004, 60, 91–110. [Google Scholar] [CrossRef]
- Hore, A.; Ziou, D. Image quality metrics: PSNR vs. SSIM. In Proceedings of the 2010 20th International Conference on Pattern Recognition, Istanbul, Turkey, 23–26 August 2010; pp. 2366–2369. [Google Scholar]
- Terven, J.; Córdova-Esparza, D.-M.; Romero-González, J.-A. A Comprehensive Review of YOLO Architectures in Computer Vision: From YOLOv1 to YOLOv8 and YOLO-NAS. Mach. Learn. Knowl. Extr. 2023, 5, 1680–1716. [Google Scholar] [CrossRef]
- Han, K.; Wang, Y.; Tian, Q.; Guo, J.; Xu, C.; Xu, C. Ghostnet: More features from cheap operations. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Seattle, WA, USA, 13–19 June 2020; pp. 1580–1589. [Google Scholar]
- Zheng, Z.; Wang, P.; Ren, D.; Liu, W.; Ye, R.; Hu, Q.; Zuo, W. Enhancing Geometric Factors in Model Learning and Inference for Object Detection and Instance Segmentation. IEEE Trans. Cybern. 2022, 52, 8574–8586. [Google Scholar] [CrossRef] [PubMed]
- Tong, Z.; Chen, Y.; Xu, Z.; Yu, R. Wise-IoU: Bounding Box Regression Loss with Dynamic Focusing Mechanism. arXiv 2023, arXiv:2301.10051. [Google Scholar]
- Bucak, S.S.; Jin, R.; Jain, A.K. Multiple Kernel Learning for Visual Object Recognition: A Review. IEEE Trans. Pattern Anal. Mach. Intell. 2014, 36, 1354–1369. [Google Scholar] [PubMed]
- Amir, S.; Siddiqui, A.A.; Ahmed, N.; Chowdhry, B.S. Implementation of line tracking algorithm using Raspberry pi in marine environment. In Proceedings of the 2014 IEEE International Conference on Industrial Engineering and Engineering Management, Selangor, Malaysia, 9–12 December 2014; pp. 1337–1341. [Google Scholar]
- Jaszewski, M.; Parameswaran, S.; Hallenborg, E.; Bagnall, B. Evaluation of maritime object detection methods for full motion video applications using the pascal voc challenge framework. In Proceedings of the Video Surveillance and Transportation Imaging Applications, San Francisco, CA, USA, 8–12 February 2015; pp. 298–304. [Google Scholar]
- Bäumker, M.; Heimes, F. New calibration and computing method for direct georeferencing of image and scanner data using the position and angular data of an hybrid inertial navigation system. In Proceedings of the OEEPE Workshop, Integrated Sensor Orientation, Hanover, Germany, 17–18 September 2001; pp. 1–17. [Google Scholar]
- Goudossis, A.; Katsikas, S.K. Towards a secure automatic identification system (AIS). J. Mar. Sci. Technol. 2019, 24, 410–423. [Google Scholar] [CrossRef]
- Karataş, G.B.; Karagoz, P.; Ayran, O. Trajectory pattern extraction and anomaly detection for maritime vessels. Internet Things 2021, 16, 100436. [Google Scholar] [CrossRef]
- Lazarowska, A. Review of Collision Avoidance and Path Planning Methods for Ships Utilizing Radar Remote Sensing. Remote Sens. 2021, 13, 3265. [Google Scholar] [CrossRef]
- Cheng, Y.; Xu, H.; Liu, Y. Robust small object detection on the water surface through fusion of camera and millimeter wave radar. In Proceedings of the IEEE International Conference on Computer Vision, Montreal, QC, Canada, 10–17 October 2021; pp. 15263–15272. [Google Scholar]
- Clunie, T.; DeFilippo, M.; Sacarny, M.; Robinette, P. Development of a perception system for an autonomous surface vehicle using monocular camera, lidar, and marine radar. In Proceedings of the 2021 IEEE International Conference on Robotics and Automation (ICRA), Xi’an, China, 30 May–5 June 2021; pp. 14112–14119. [Google Scholar]
- Paoletti, S.; Rumes, B.; Pierantonio, N.; Panigada, S.; Jan, R.; Folegot, T.; Schilling, A.; Riviere, N.; Carrier, V.; Dumoulin, A.J.R.I. SEADETECT: Developing an automated detection system to reduce whale-vessel collision risk. Res. Ideas Outcomes 2023, 9, e113968. [Google Scholar] [CrossRef]
- Wu, Y.; Chu, X.; Deng, L.; Lei, J.; He, W.; Królczyk, G.; Li, Z. A new multi-sensor fusion approach for integrated ship motion perception in inland waterways. Measurement 2022, 200, 111630. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Serial Number | Stitching Method | PSNR | Time (s) | AP_Time (s) |
|---|---|---|---|---|
| ① | SIFT + AWF | 25.382 | 0.471 | 0.017 |
| ② | SIFT + DFF | 25.386 | 0.517 | 0.017 |
| ③ | SURF + AWF | 24.690 | 0.436 | 0.021 |
| ④ | SURF + DFF | 24.679 | 0.485 | 0.021 |
| ⑤ | SSIM-EW | 25.736 | 0.435 | 0.020 |
| Serial Number | Model | P (%) | R (%) | mAP50 (%) | FPS |
|---|---|---|---|---|---|
| ① | Baseline | 84.6 | 75.2 | 82.9 | 126 |
| ② | Baseline + SGnet | 82.7 | 79.5 | 84.8 | 110 |
| ③ | Baseline + WIoU | 86.7 | 75.3 | 83.3 | 126 |
| ④ | Baseline + SGnet + WIoU | 86.1 | 79.5 | 85.2 | 110 |
| Ship’s AP (%) | Other’s AP (%) | mAP50 (%) | |
|---|---|---|---|
| YOLOv5s | 92.3 | 75.0 | 83.6 |
| YOLOv7-tiny | 90.8 | 71.7 | 81.3 |
| YOLOv8s | 92.0 | 73.7 | 82.9 |
| YOLOv8-SGW | 92.1 | 78.4 | 85.2 |
| Ship’s Name | XIA GANG TUO 30 |
|---|---|
| MMSI | 413545920 |
| LOA | 38.35 m (excluding bow and stern fenders) |
| Breadth | 10.60 m |
| Depth | 4.90 m |
| Designed Draft | 3.70 m |
| Speed | >13 kn |
| Bollard Pull | Forward > 60 tons; astern > 55 tons |
| Crew Capacity | 8 people |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, C.; Cai, X.; Li, Y.; Zhai, R.; Wu, R.; Zhu, S.; Guan, L.; Luo, Z.; Zhang, S.; Zhang, J. Research and Application of Panoramic Visual Perception-Assisted Navigation Technology for Ships. J. Mar. Sci. Eng. 2024, 12, 1042. https://doi.org/10.3390/jmse12071042
Wang C, Cai X, Li Y, Zhai R, Wu R, Zhu S, Guan L, Luo Z, Zhang S, Zhang J. Research and Application of Panoramic Visual Perception-Assisted Navigation Technology for Ships. Journal of Marine Science and Engineering. 2024; 12(7):1042. https://doi.org/10.3390/jmse12071042
Chicago/Turabian StyleWang, Chiming, Xiaocong Cai, Yanan Li, Runxuan Zhai, Rongjiong Wu, Shunzhi Zhu, Liangqing Guan, Zhiqiang Luo, Shengchao Zhang, and Jianfeng Zhang. 2024. "Research and Application of Panoramic Visual Perception-Assisted Navigation Technology for Ships" Journal of Marine Science and Engineering 12, no. 7: 1042. https://doi.org/10.3390/jmse12071042
APA StyleWang, C., Cai, X., Li, Y., Zhai, R., Wu, R., Zhu, S., Guan, L., Luo, Z., Zhang, S., & Zhang, J. (2024). Research and Application of Panoramic Visual Perception-Assisted Navigation Technology for Ships. Journal of Marine Science and Engineering, 12(7), 1042. https://doi.org/10.3390/jmse12071042