
An Adaptive Large Neighborhood Search Algorithm for Equipment Scheduling in the Railway Yard of an Automated Container Terminal



Abstract
1. Introduction
2. Literature Review
3. Model Establishment
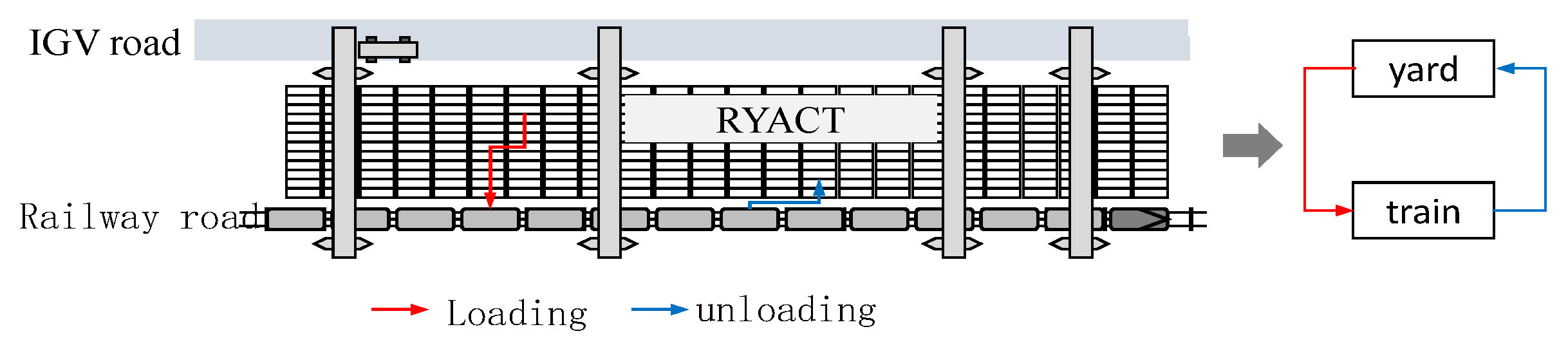
3.1. Problem Description
3.2. Assumption
- (1)
- Overturning activity is not considered when an ARMG moves containers in the RYACT.
- (2)
- To avoid interference between loading and unloading, the operation mode of unloading before loading is adopted.
- (3)
- The horizontal moving speed of ARMG carts remains unchanged.
- (4)
- In the RYACT (or train), the operation time required for an ARMG to grab a container is equal to that required to release a container.
- (5)
- The container tasks for each ARMG are known.
- (6)
- To ensure the safety of the container handling operation, the cart does not move during the movement of the ARMG trolley.
3.3. Mathematical Model Formulation
3.4. Mathematical Model
4. Proposed Algorithms
4.1. Encoding Method
4.2. RSA
4.3. ALNS Algorithm
5. Experiment and Result Analysis
5.1. Experimental Design
- Experiment 1: Verify the feasibility of the model and algorithm
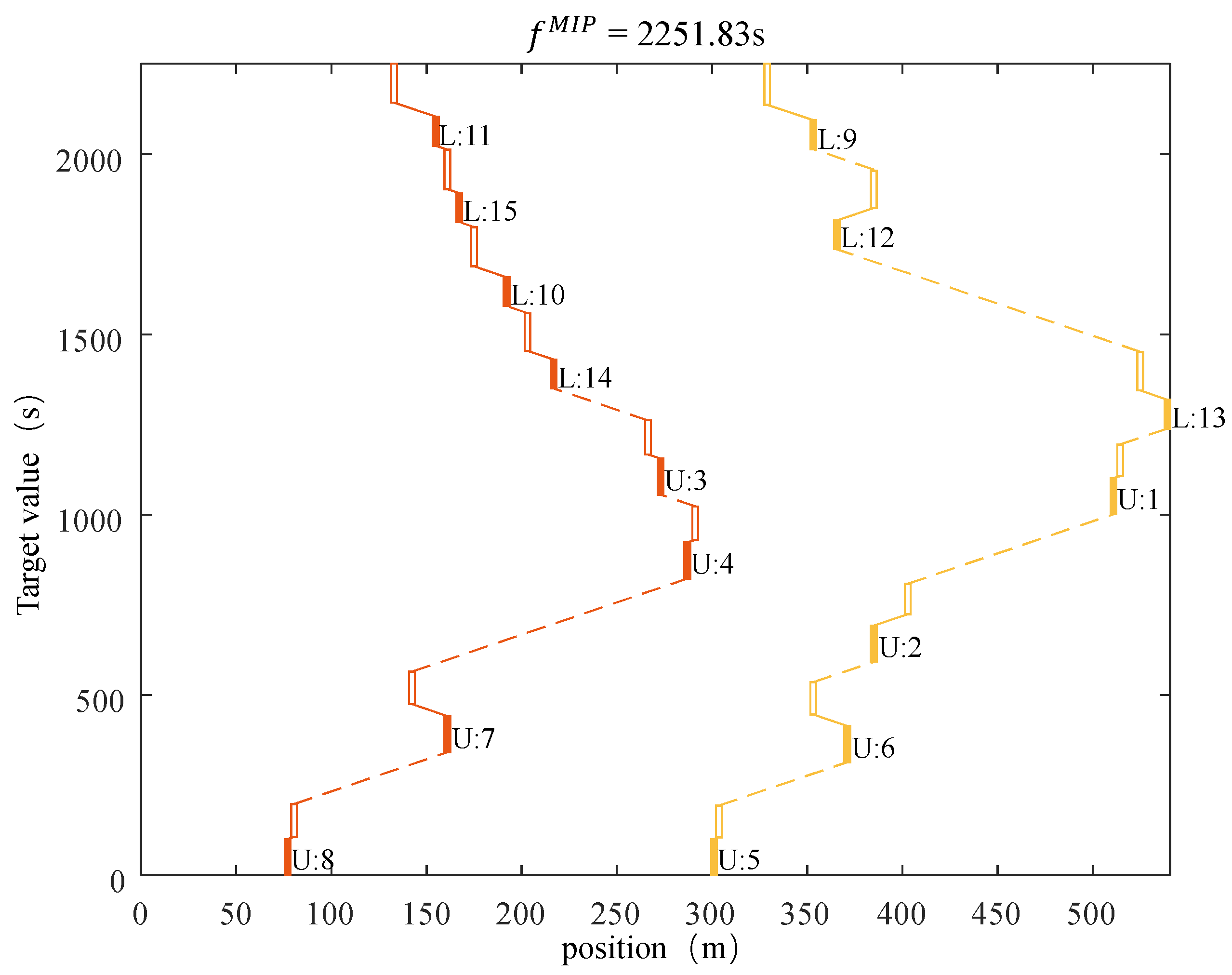
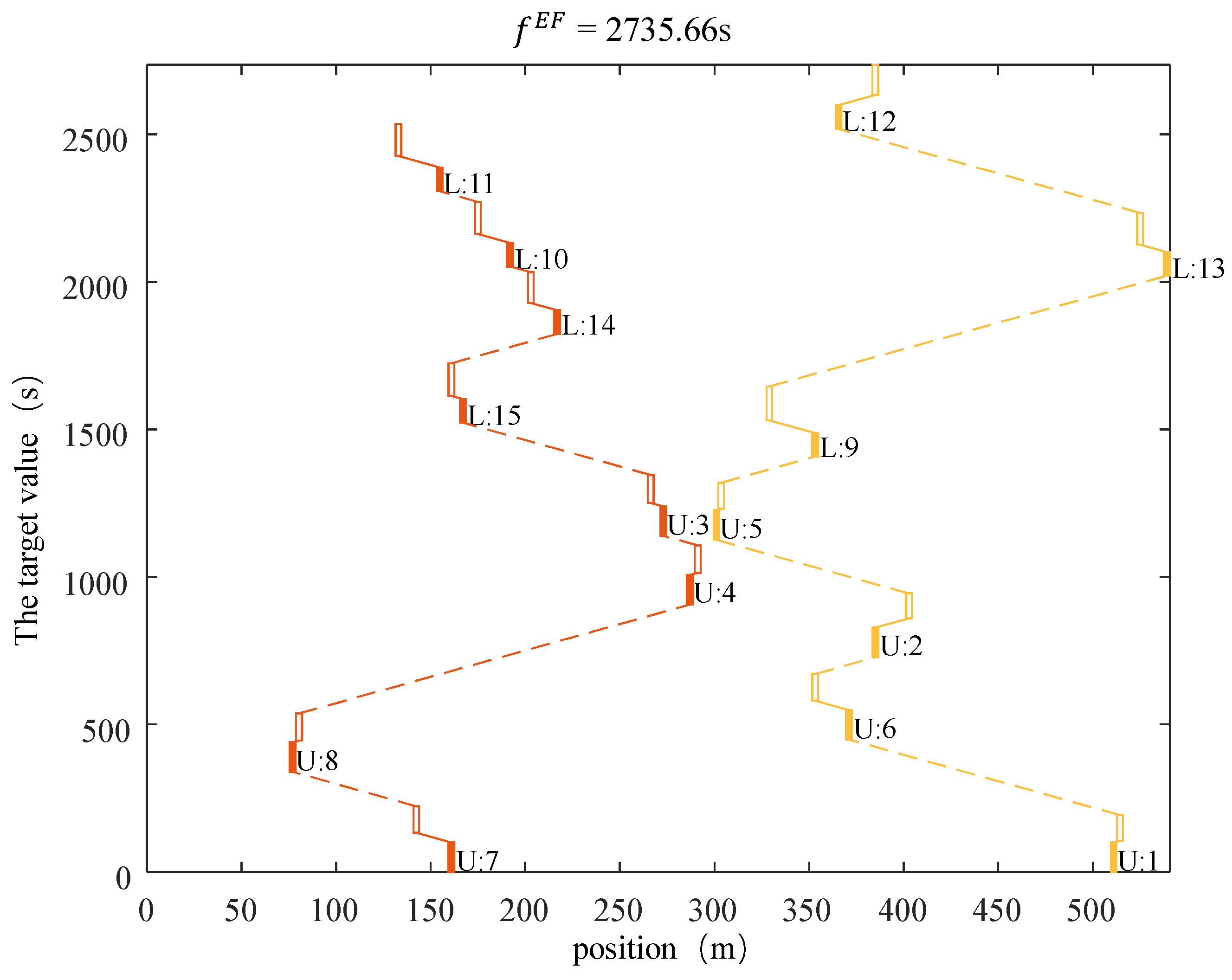
- Experiment 2: Compare the optimality and computation time of the model [2-1] and the algorithm
5.2. Result Analysis
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- He, J.; Huang, Y.; Yan, W.; Wang, S. Integrated internal truck, yard crane and quay crane scheduling in a container terminal considering energy consumption. Expert Syst. Appl. 2015, 42, 2464–2487. [Google Scholar] [CrossRef]
- Vallada, E.; Belenguer, J.M.; Villa, F.; Alvarez-Valdes, R. Models and algorithms for a yard crane scheduling problem in container ports. Eur. J. Oper. Res. 2023, 309, 910–924. [Google Scholar] [CrossRef]
- Iris, Ç.; Lam, J.S.L. Recoverable robustness in weekly berth and quay crane planning. Transp. Res. Part B Methodol. 2019, 122, 365–389. [Google Scholar] [CrossRef]
- Chu, F.; He, J.; Zheng, F.; Liu, M. Scheduling multiple yard cranes in two adjacent container blocks with position-dependent processing times. Comput. Ind. Eng. 2019, 136, 355–365. [Google Scholar] [CrossRef]
- Gharehgozli, A.H.; Yu, Y.; de Koster, R.; Udding, J.T. An exact method for scheduling a yard crane. Eur. J. Oper. Res. 2014, 235, 431–447. [Google Scholar] [CrossRef]
- Hu, H.; Mo, J.; Zhen, L. Integrated optimization of container allocation and yard cranes dispatched under delayed transshipment. Transp. Res. Part C Emerg. Technol. 2024, 158, 104429. [Google Scholar] [CrossRef]
- Oladugba, A.O.; Gheith, M.; Eltawil, A. A new solution approach for the twin yard crane scheduling problem in automated container terminals. Adv. Eng. Inform. 2023, 57, 102015. [Google Scholar] [CrossRef]
- Gao, Y.; Chang, D.; Chen, C.-H. A digital twin-based approach for optimizing operation energy consumption at automated container terminals. J. Clean. Prod. 2023, 385, 135782. [Google Scholar] [CrossRef]
- Hu, Z.-H.; Sheu, J.-B.; Luo, J.X. Sequencing twin automated stacking cranes in a block at automated container terminal. Transp. Res. Part C Emerg. Technol. 2016, 69, 208–227. [Google Scholar] [CrossRef]
- Han, X.; Wang, Q.; Huang, J. Scheduling cooperative twin automated stacking cranes in automated container terminals. Comput. Ind. Eng. 2019, 128, 553–558. [Google Scholar] [CrossRef]
- Luo, J.; Wu, Y.; Mendes, A.B. Modelling of integrated vehicle scheduling and container storage problems in unloading process at an automated container terminal. Comput. Ind. Eng. 2016, 94, 32–44. [Google Scholar] [CrossRef]
- Choe, R.; Kim, J.; Ryu, K.R. Online preference learning for adaptive dispatching of AGVs in an automated container terminal. Appl. Soft Comput. 2016, 38, 647–660. [Google Scholar] [CrossRef]
- Wang, Z.; Zeng, Q. A branch-and-bound approach for AGV dispatching and routing problems in automated container terminals. Comput. Ind. Eng. 2022, 166, 107968. [Google Scholar] [CrossRef]
- Wu, M.; Gao, J.; Li, L.; Wang, Y. Control optimisation of automated guided vehicles in container terminal based on Petri network and dynamic path planning. Comput. Electr. Eng. 2022, 104, 108471. [Google Scholar] [CrossRef]
- Drungilas, D.; Kurmis, M.; Senulis, A.; Lukosius, Z.; Andziulis, A.; Januteniene, J.; Bogdevicius, M.; Jankunas, V.; Voznak, M. Deep reinforcement learning based optimization of automated guided vehicle time and energy consumption in a container terminal. Alex. Eng. J. 2023, 67, 397–407. [Google Scholar] [CrossRef]
- Cai, B.; Huang, S.; Liu, D.; Dissanayake, G. Rescheduling policies for large-scale task allocation of autonomous straddle carriers under uncertainty at automated container terminals. Robot. Auton. Syst. 2014, 62, 506–514. [Google Scholar] [CrossRef]
- Yang, X.; Hu, H.; Cheng, C. Flexible yard space allocation plan for new type of automated container terminal equipped with unilateral-cantilever rail-mounted gantry cranes. Adv. Eng. Inform. 2023, 58, 102193. [Google Scholar] [CrossRef]
- Lau, H.Y.K.; Zhao, Y. Integrated scheduling of handling equipment at automated container terminals. Int. J. Prod. Econ. 2008, 112, 665–682. [Google Scholar] [CrossRef]
- Shouwen, J.; Di, L.; Zhengrong, C.; Dong, G. Integrated scheduling in automated container terminals considering AGV conflict-free routing. Transp. Lett. 2020, 13, 501–513. [Google Scholar] [CrossRef]
- Zhuang, Z.; Zhang, Z.; Teng, H.; Qin, W.; Fang, H. Optimization for integrated scheduling of intelligent handling equipment with bidirectional flows and limited buffers at automated container terminals. Comput. Oper. Res. 2022, 145, 105863. [Google Scholar] [CrossRef]
- Liu, W.; Zhu, X.; Wang, L.; Wang, S. Multiple equipment scheduling and AGV trajectory generation in U-shaped sea-rail intermodal automated container terminal. Measurement 2023, 206, 112262. [Google Scholar] [CrossRef]
- Skaf, A.; Lamrous, S.; Hammoudan, Z.; Manier, M.-A. Integrated quay crane and yard truck scheduling problem at port of Tripoli-Lebanon. Comput. Ind. Eng. 2021, 159, 107448. [Google Scholar] [CrossRef]
- Wang, Y.-Z.; Hu, Z.-H.; Tian, X.-D. Scheduling ASC and AGV considering direct, buffer, and hybrid modes for transferring containers. Comput. Oper. Res. 2024, 161, 106419. [Google Scholar] [CrossRef]
- Zhang, X.; Li, H.; Sheu, J.-B. Integrated scheduling optimization of AGV and double yard cranes in automated container terminals. Transp. Res. Part B Methodol. 2024, 179, 102871. [Google Scholar] [CrossRef]
- Cao, J.X.; Lee, D.-H.; Chen, J.H.; Shi, Q. The integrated yard truck and yard crane scheduling problem: Benders’ decomposition-based methods. Transp. Res. Part E Logist. Transp. Rev. 2010, 46, 344–353. [Google Scholar] [CrossRef]
- Bazzazi, M.; Safaei, N.; Javadian, N. A genetic algorithm to solve the storage space allocation problem in a container terminal. Comput. Ind. Eng. 2009, 56, 44–52. [Google Scholar] [CrossRef]
- Yu, M.; Liang, Z.; Teng, Y.; Zhang, Z.; Cong, X. The inbound container space allocation in the automated container terminals. Expert Syst. Appl. 2021, 179, 115014. [Google Scholar] [CrossRef]
- Feng, X.; He, Y.; Kim, K.-H. Space planning considering congestion in container terminal yards. Transp. Res. Part B Methodol. 2022, 158, 52–77. [Google Scholar] [CrossRef]
- Xiang, X.; Liu, C. Modeling and analysis for an automated container terminal considering battery management. Comput. Ind. Eng. 2021, 156, 115014. [Google Scholar] [CrossRef]
- Li, J.; Yan, L.; Xu, B. Research on Multi-Equipment Cluster Scheduling of U-Shaped Automated Terminal Yard and Railway Yard. J. Mar. Sci. Eng. 2023, 11, 417. [Google Scholar] [CrossRef]
- Yang, Y.; Sun, S.; He, S.; Jiang, Y.; Wang, X.; Yin, H.; Zhu, J. Research on the Multi-Equipment Cooperative Scheduling Method of Sea-Rail Automated Container Terminals under the Loading and Unloading Mode. J. Mar. Sci. Eng. 2023, 11, 1975. [Google Scholar] [CrossRef]
- Niu, Y.; Yu, F.; Yao, H.; Yang, Y. Multi-equipment coordinated scheduling strategy of U-shaped automated container terminal considering energy consumption. Comput. Ind. Eng. 2022, 174, 108804. [Google Scholar] [CrossRef]
- Ropke, S.; Pisinger, D. An Adaptive Large Neighborhood Search Heuristic for the Pickup and Delivery Problem with Time Windows. Transp. Sci. 2006, 40, 455–472. [Google Scholar] [CrossRef]
- Sun, P.; Veelenturf, L.P.; Hewitt, M.; Van Woensel, T. Adaptive large neighborhood search for the time-dependent profitable pickup and delivery problem with time windows. Transp. Res. Part E Logist. Transp. Rev. 2020, 138, 101942. [Google Scholar] [CrossRef]
- Cai, L.; Wang, X.; Luo, Z.; Liang, Y. A hybrid adaptive large neighborhood search and tabu search algorithm for the electric vehicle relocation problem. Comput. Ind. Eng. 2022, 167, 108005. [Google Scholar] [CrossRef]
- Wen, M.; Sun, W.; Yu, Y.; Tang, J.; Ikou, K. An adaptive large neighborhood search for the larger-scale multi depot green vehicle routing problem with time windows. J. Clean. Prod. 2022, 374, 133916. [Google Scholar] [CrossRef]
- He, L.; Liu, X.; Laporte, G.; Chen, Y.; Chen, Y. An improved adaptive large neighborhood search algorithm for multiple agile satellites scheduling. Comput. Oper. Res. 2018, 100, 12–25. [Google Scholar] [CrossRef]
- Zhang, Y.; Atasoy, B.; Negenborn, R.R. Preference-Based Multi-Objective Optimization for Synchromodal Transport Using Adaptive Large Neighborhood Search. Transp. Res. Rec. J. Transp. Res. Board 2021, 2676, 71–87. [Google Scholar] [CrossRef]
- Wu, Y.; Qureshi, A.G.; Yamada, T. Adaptive large neighborhood decomposition search algorithm for multi-allocation hub location routing problem. Eur. J. Oper. Res. 2022, 302, 1113–1127. [Google Scholar] [CrossRef]
- Li, Y.; Chen, M.; Huo, J. A hybrid adaptive large neighborhood search algorithm for the large-scale heterogeneous container loading problem. Expert Syst. Appl. 2022, 189, 115909. [Google Scholar] [CrossRef]
- Wang, X.; Liang, Y.; Wei, X.; Chew, E.P. An adaptive large neighborhood search algorithm for the tugboat scheduling problem. Comput. Ind. Eng. 2023, 177, 109039. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sets/Parameters | Definitions |
|---|---|
| Set of ARMGs, indexed by s | |
| Set of ARMG tasks for loading containers, indexed by and | |
| Set of ARMG tasks for unloading containers, indexed by and | |
| Set of ARMG tasks for loading and unloading containers, indexed by and | |
| Set of all tasks; ; | |
| Set of tasks for loading and unloading containers;, where represents the virtual start task and can be similarly defined in and | |
| Set of tasks for loading and unloading containers; , where represents the virtual start task and can be similarly defined in and | |
| Set of tasks that may conflict with job tasks of adjacent ARMG, thereinto which indicates that, if an ARMG carries out container task i at the same time that another ARMG carries out container task j, then the two ARMGs will interfere with each other | |
| The ARMG assigned to task | |
| The conflict of tasks between the nodes selected in the middle of the moment; when its value is 0, it is the middle time of ARMG operation in the RYACT, and, when it is 1, it is the middle time of ARMG operation in the train carriage | |
| The middle of the moment to avoid the conflict of tasks when its value is 0, it refers to the middle moment of the starting position, and, when it is 1, it refers to the middle moment of the ending position | |
| The operation time required for the ARMG to grab/release a container in the RYACT | |
| The operation time required for the ARMG to grab/release a container on the train | |
| Time required in operation task for the ARMG to grab/release a container on the train | |
| The minimum time interval between ARMG container tasks and | |
| The time taken by the ARMG to move from the end position of container task to the start position of container task | |
| The moving time of the sprig trolley when the ARMG completes task | |
| A positive number that is large enough, |
| Variables | Definitions |
|---|---|
| If the value is , it indicates that the ARMG starts container task immediately after completing container task ; otherwise, it is 0. | |
| If the value is , it indicates that interference task the task is completed before task ; otherwise, it is 0. | |
| The start time of task , which is a real variable. | |
| The end time of the task , which is a real variable. | |
| The middle of the moment to grab or release a container for ARMG operating conflict task . If it is in railway yard, it can be calculated via ; if it is on the train, it can be calculated via , which is a real variable. |
| Step 1 | Input parameter: ; Set the maximum number of iterations ; |
| Step 2 | Initialize the data: set iteration number ; The score of the n sequence Initialize the minimum score and the corresponding ; |
| Step 3 | While |
| Step 3.1 | Randomly generate a sequence of ARMG tasks; |
| Step 3.2 | According to tasks assignment and , the task subsequence of each ARMG is determined. |
| Step 3.3 | Calculate the earliest start and end time of the ARMG task according to the calculation method in mathematical model |
| Step 3.4 | Determine the score of the task sequence ; |
| Step 3.5 | ; |
| Step 3.6 | If , there is and , otherwise, go to Step 3.1; |
| End while | |
| Step 4 | Calculate according to the optimal sequence ; ; |
| Step 5 | Return |
| Step 1 | Input data: integer encoding Initialize the data: Task location number The start time of the virtual task |
| Step 2 | Generate the task subsequence for each ARMG according to the code and the task assignment ( and ) |
| Step 3.1 | While |
| Step 3.2 | Determine the insert task |
| Step 3.3 | Calculate the earliest start and end times for ARMG task according to the method described in Section 3.1 |
| Step 3.4 | |
| End while | |
| Step 4 | Determine the score of the task sequence and the time node of the task and |
| Step 5 | Return |
| Step 1 | Input data: ; Set algorithm parameters: The number of solutions generated per iteration: ; Maximum number of iterations ; The maximum number of iterations with the same optimal value ; |
| Step 2 | The initial solution is generated by RSA, and its score is calculated; |
| Step 3 | Initialize the data: Set iteration number ; The score and sequence of the m code of the n iteration Optimal score and corresponding sequence |
| Step 4 | While |
| Step 4.1 | Determine the list of domain search operators; |
| Step 4.2 | Search the neighborhood of to generate new encodings ; |
| Step 4.3 | For |
| Step 4.3.1 | Calculate score of according to Table 3; |
| End for | |
| Step 4.4 | Determine the optimal score and corresponding sequence ; |
| End while | |
| Step 5 | Calculate according to the optimal sequence ; ; |
| Step 6 | Return |
| Parameters | Value |
|---|---|
| ARMG cart moving speed | 0.56 m/s |
| ARMG trolley moving speed | 2 m/s |
| The amount of time ARMG spends on vertical operations in the yard () | 80 s |
| The amount of time ARMG spends on vertical operations on the train () | 100 s |
| Parameter | Value |
|---|---|
| The number of solutions per generation () | 24 |
| Maximum number of iterations () | 600 |
| The maximum number of iterations in which the minimum solution remains unchanged () | 100 |
| Operator class () | 6 |
| The initial value of the operator weight () | 50 |
| Number of Tasks | [M1] | RSA | ALNS | ||||||
|---|---|---|---|---|---|---|---|---|---|
| 10 | 1878.54 | 0.00 | 0.10 | 1878.54 | 0.00 | <0.01 | 1878.54 | 1878.54 | 3.02 |
| 12 | 1986.96 | 0.00 | 0.05 | 1986.96 | 0.00 | <0.01 | 1986.96 | 1986.96 | 3.22 |
| 14 | 2049.12 | 0.00 | 0.05 | 2049.12 | 0.00 | <0.01 | 2049.12 | 2049.12 | 2.84 |
| 16 | 2475.43 | 0.00 | 0.12 | 2475.43 | 0.00 | <0.01 | 2475.43 | 2478.07 | 2.86 |
| 18 | 2612.16 | 0.00 | 0.27 | 2656.45 | 1.70 | <0.01 | 2612.16 | 2620.24 | 3.29 |
| 20 | 2830.07 | 0.00 | 1.07 | 3130.36 | 10.61 | <0.01 | 2830.07 | 2867.49 | 2.68 |
| 22 | 2105.69 | 0.00 | 1.78 | 2130.69 | 1.19 | <0.01 | 2105.69 | 2110.97 | 3.36 |
| 24 | 2155.51 | 0.00 | 0.87 | 2284.17 | 5.97 | <0.01 | 2155.51 | 2165.71 | 2.72 |
| 26 | 2413.94 | 0.00 | 1.33 | 2552.51 | 5.74 | <0.01 | 2413.94 | 2468.51 | 2.73 |
| 28 | 2621.93 | 0.00 | 19.82 | 2726.21 | 3.98 | <0.01 | 2621.93 | 2651.93 | 2.80 |
| 30 | 2691.53 | 0.00 | 1.01 | 2978.81 | 10.67 | <0.01 | 2691.53 | 2762.16 | 3.87 |
| 32 | 2151.26 | 0.00 | 0.45 | 2273.40 | 5.68 | <0.01 | 2151.26 | 2152.58 | 4.02 |
| 34 | 2252.36 | 0.00 | 0.64 | 2412.36 | 7.10 | <0.01 | 2252.36 | 2298.24 | 4.24 |
| 36 | 2387.88 | 0.00 | 0.63 | 2582.88 | 8.17 | <0.01 | 2387.88 | 2399.74 | 4.39 |
| 38 | 2627.73 | 0.00 | 147.15 | 2712.16 | 3.21 | <0.01 | 2627.73 | 2640.80 | 4.79 |
| 40 | 2615.44 | 0.00 | 64.27 | 2810.44 | 7.46 | <0.01 | 2615.44 | 2661.64 | 4.57 |
| 42 | 2180.71 | 0.00 | 0.74 | 2247.14 | 3.05 | <0.01 | 2180.71 | 2186.28 | 4.42 |
| 44 | 2236.34 | −1.03 | 61.14 | 2474.91 | 9.53 | <0.01 | 2259.65 | 2340.62 | 4.83 |
| 46 | 2357.44 | 0.00 | 145.45 | 2465.14 | 4.57 | <0.01 | 2357.44 | 2361.30 | 4.24 |
| 48 | 2400.13 | 0.00 | 5.41 | 2576.76 | 7.36 | <0.01 | 2400.13 | 2429.35 | 4.65 |
| 50 | 2510.53 | 0.00 | 5.33 | 2695.39 | 7.36 | <0.01 | 2510.53 | 2536.04 | 5.14 |
| 60 | 3553.20 | −0.12 | 1200.11 | 4166.77 | 17.13 | <0.01 | 3557.49 | 3690.65 | 4.89 |
| 70 | 3978.53 | −2.26 | 1133.98 | 5063.13 | 24.38 | <0.01 | 4070.67 | 4362.10 | 5.22 |
| 80 | 4478.54 | −5.73 | 1203.72 | 5847.83 | 20.98 | <0.01 | 4750.69 | 4993.32 | 6.27 |
| 90 | 5376.27 | −3.83 | 1231.24 | 6477.87 | 15.87 | <0.01 | 5590.56 | 5751.43 | 5.94 |
| 100 | — | — | 7059.66 | 17.48 | <0.01 | 6009.37 | 6291.13 | 5.68 | |
| 110 | — | — | 8002.13 | 17.11 | <0.01 | 6833.24 | 7046.66 | 6.77 | |
| 120 | — | — | 8793.97 | 15.99 | <0.01 | 7581.89 | 7724.49 | 8.25 | |
| 130 | — | — | 9644.81 | 20.17 | <0.01 | 8025.91 | 8389.71 | 8.12 | |
| 140 | — | — | 10,098.89 | 17.16 | <0.01 | 8620.06 | 8999.28 | 7.61 | |
| 150 | — | — | 10,892.59 | 15.04 | <0.01 | 9468.16 | 9818.32 | 8.56 | |
| 160 | — | — | 11,716.71 | 18.28 | <0.01 | 9906.03 | 10,384.06 | 7.96 | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, H.; Liu, W. An Adaptive Large Neighborhood Search Algorithm for Equipment Scheduling in the Railway Yard of an Automated Container Terminal. J. Mar. Sci. Eng. 2024, 12, 710. https://doi.org/10.3390/jmse12050710
Chen H, Liu W. An Adaptive Large Neighborhood Search Algorithm for Equipment Scheduling in the Railway Yard of an Automated Container Terminal. Journal of Marine Science and Engineering. 2024; 12(5):710. https://doi.org/10.3390/jmse12050710
Chicago/Turabian StyleChen, Hongbin, and Wei Liu. 2024. "An Adaptive Large Neighborhood Search Algorithm for Equipment Scheduling in the Railway Yard of an Automated Container Terminal" Journal of Marine Science and Engineering 12, no. 5: 710. https://doi.org/10.3390/jmse12050710
APA StyleChen, H., & Liu, W. (2024). An Adaptive Large Neighborhood Search Algorithm for Equipment Scheduling in the Railway Yard of an Automated Container Terminal. Journal of Marine Science and Engineering, 12(5), 710. https://doi.org/10.3390/jmse12050710