
Visual Navigation Systems for Maritime Smart Ships: A Survey


 , ,
, , 
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
- A summary of the IMO guidelines and industry codes for smart ships;
- A review of the development of navigation technology and an analysis of its advancement;
- A characterization of the combination and application of different visual navigation techniques;
- An overview of the current status and future development of visual navigation technology and smart ships.
2. Smart Ships and Navigation Technology
2.1. Smart Ships
2.1.1. IMO Guidance and Industry Requirements for Smart Ships
2.1.2. Progress and Development of Smart Ships
2.2. Navigation Technology
2.2.1. Perception Technology
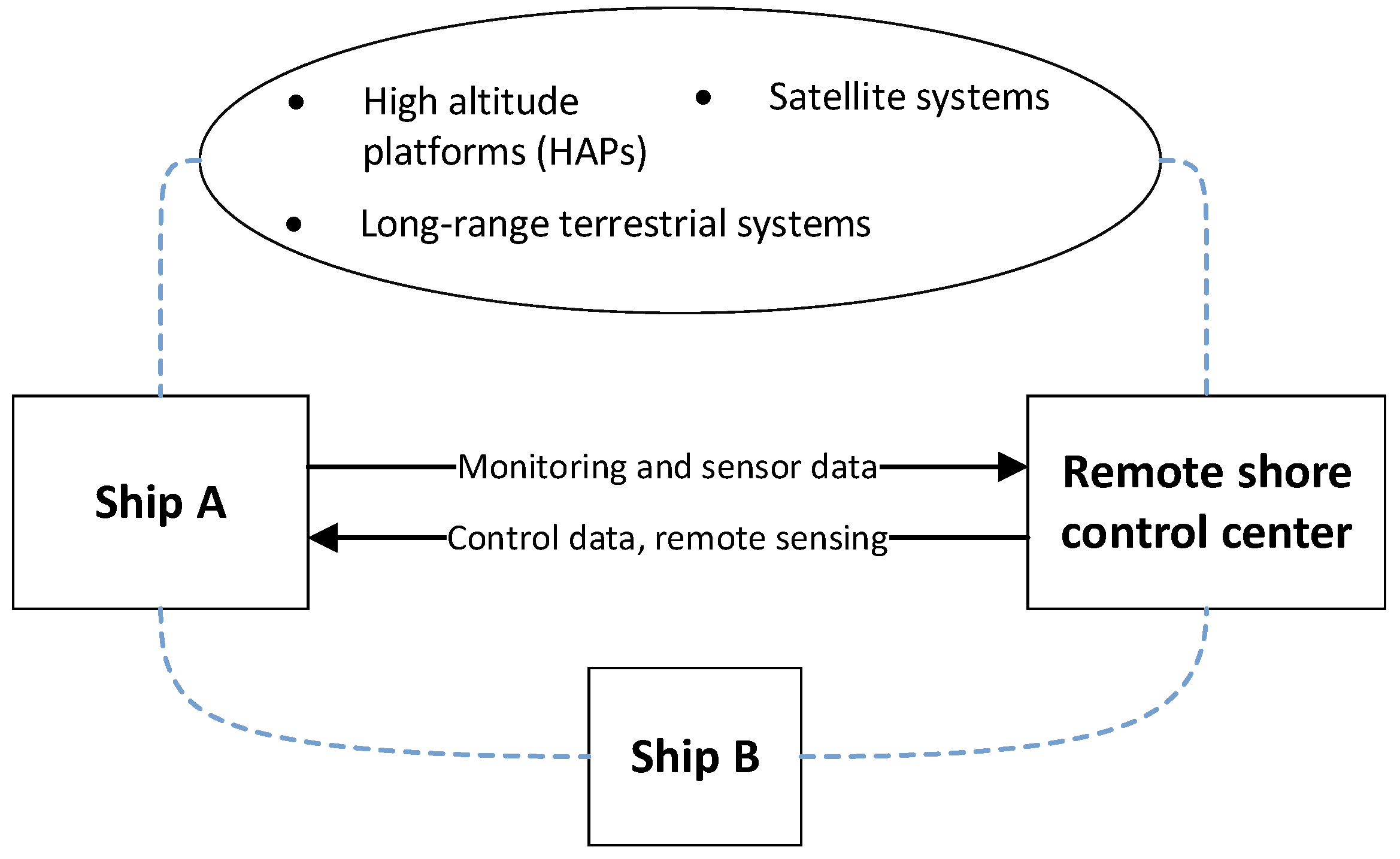
2.2.2. Communication Technology
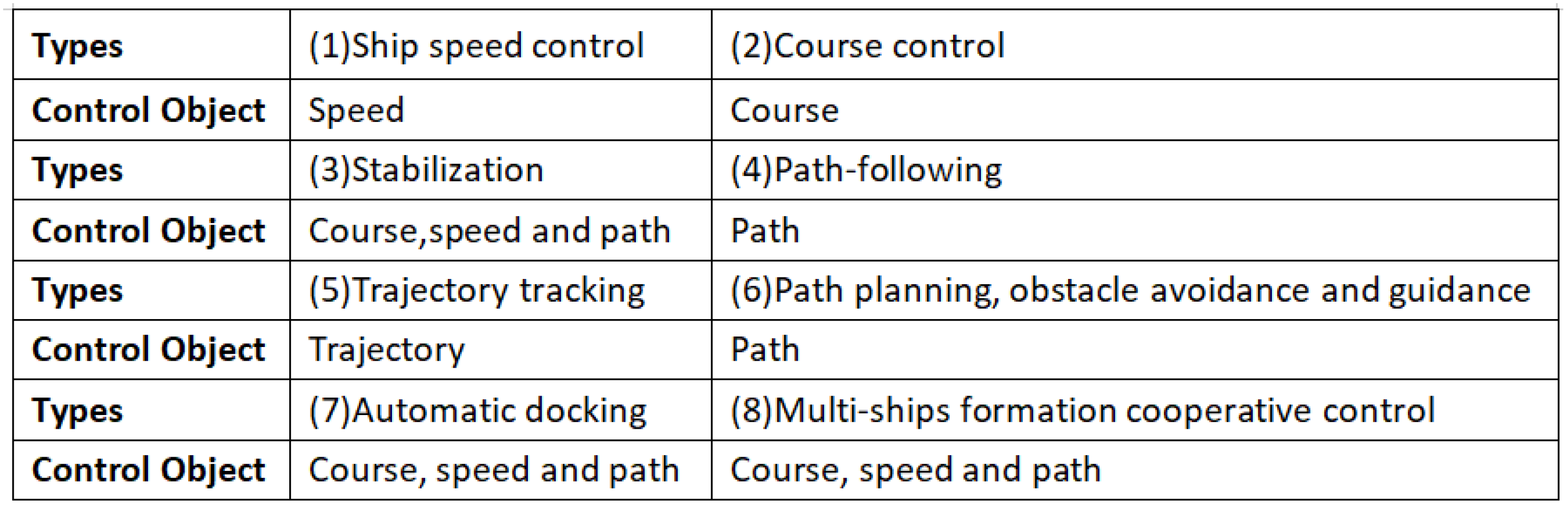
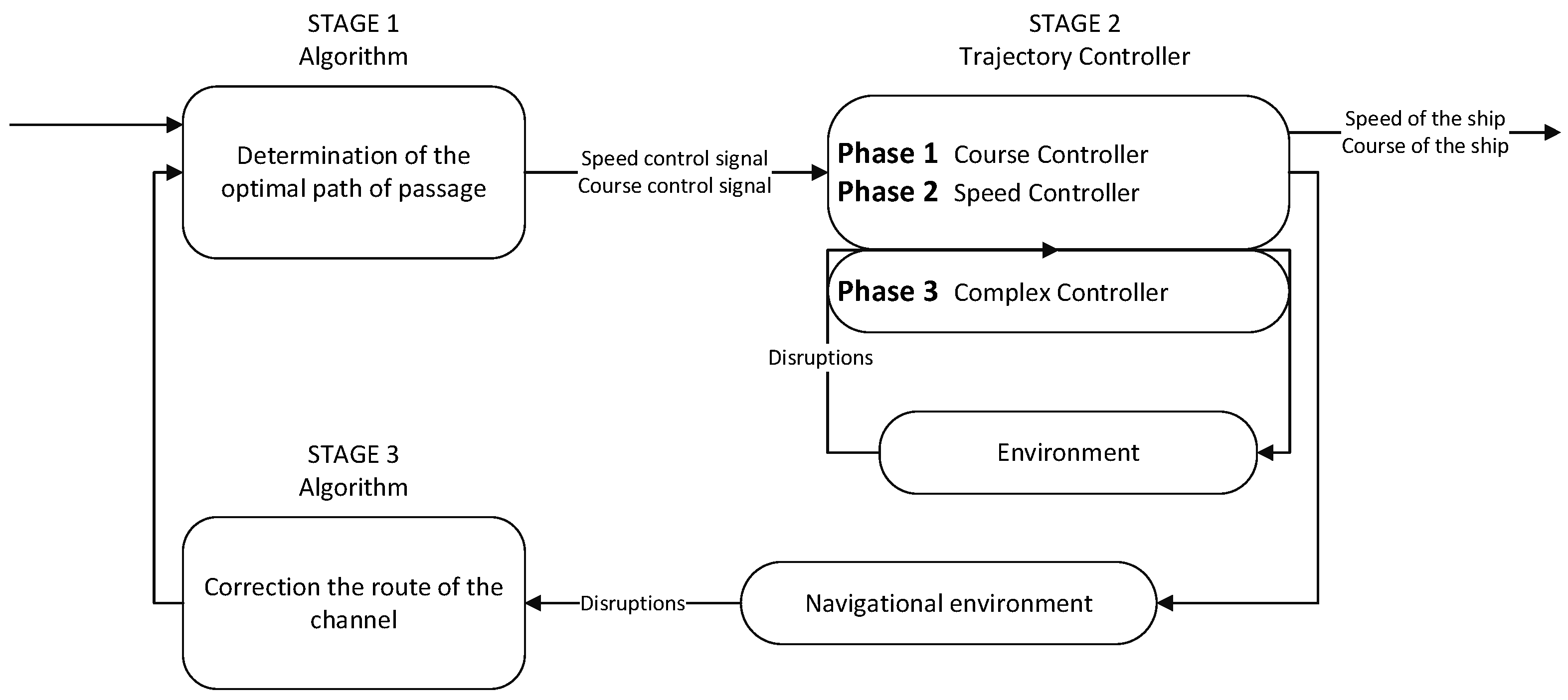
2.2.3. Motion Control Technology
2.2.4. Collision Avoidance Technology
3. Visual Perception Navigation Technology
3.1. Single Perception
3.1.1. AISs
3.1.2. Radar
3.1.3. Infrared
3.1.4. Visual Technology
3.2. Integrated Perception
4. Future Trends
4.1. Trends in Intelligence and Automation
4.2. Future Challenges and Opportunities for Smart Ship Visual Navigation Systems
5. Conclusions
Author Contributions
Funding
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
List of Abbreviations
| ADRC | Active Disturbance Rejection Control |
| AE | Autoencoder |
| AI | Artificial Intelligence |
| AIS | Automatic Identification System |
| ADQvis | AIS Data Quality Visualization |
| A-IPDA | AIS-Assisted Integrated Probabilistic Data Association |
| APF | Artificial Potential Field |
| ARIMA | Autoregressive Integrated Moving Average |
| BMMFF | Background Modeling Combined with Multiple Features in the Fourier Domain |
| CE | Cross-Entropy |
| CFAR | Constant False Alarm Rate |
| CNN | Convolutional Neural Network |
| ConvLSTM | Convolutional Long and Short-Term Memory Network |
| CSK | Complex Signal Klick |
| DCPA | Distance to the Closest Point of Approach |
| DDPG | Deep Deterministic Policy Gradient |
| DDV | Degree of Domain Violation |
| ENCs | Electronic Nautical Charts |
| EO | Electro-Optical |
| FAL | The Facilitation Committee |
| FLPP | Fast Local Path Planning |
| GA | Genetic Algorithms |
| GAN | Generative Adversarial Network |
| GMDSS | Global Maritime Distress and Safety System |
| GNSS | Global Navigation Satellite System |
| ICT | Information and Communications Technology |
| IMO | International Maritime Organization |
| IR | Infrared |
| IRT | Infrared Technology |
| ISRt-detr | Inshore Ship Real-Time Detection Transformer |
| KDE | Kernel Density Estimation |
| LEG | The Legal Committee |
| LIDAR | Light Detection and Ranging |
| LSTM | Long Short-Term Memory |
| LVENet | Low-Visibility Enhancement Network |
| MASS | Maritime Autonomous Surface Ship |
| MCOV | Modified Covariance |
| MMSI | Maritime Mobile Service Identity |
| MSC | Maritime Safety Committee |
| NBDP | Narrowband Direct Printing Telegraphy |
| NN | Neural Network |
| PID | Proportional–Integral–Differential |
| PPI | Plane Position Indicator |
| PSO | Particle Swarm Optimization |
| QSD | Quadratic Ship Domain |
| R-CNN | Region Convolutional Neural Network |
| RFIs | Radio-Frequency Interferences |
| RMA | ResNet–Multi-Scale–Attention |
| RSE | Regulatory Scoping Exercise |
| RT | Radiotelephone |
| RVM | Relevance Vector Machine |
| SAR | Synthetic Aperture Radar |
| SE | Squeeze and Excitation |
| SGW | Serving Gate Way |
| SiamRPN++ | Siamese Region Proposal Network Plus Plus |
| SOLAS | The Safety of Life at Sea |
| SQMCR | Stackelberg Q-learning-Based Multi-Hop Cooperative Routing Algorithm |
| SSIM-EW | Structural Similarity Index Measure–Elliptical Weighted Algorithm Stitcher |
| TCPA | Time to the Closest Point of Approach |
| TDE | Time to Domain Exit |
| TD-NLVO | Time-Discretized Non-Linear Velocity Obstacle |
| TDV | Time to Domain Violation |
| UKF | Untraceable Kalman Filter |
| VA | Visual Analytics |
| VAM | Visual Attention Model |
| VCRO | Vessel Conflict Ranking Operator |
| VHF | Very High Frequency |
| VO | Velocity Obstacle |
References
- Sakar, C.; Toz, A.C.; Buber, M.; Koseoglu, B. Risk analysis of grounding accidents by mapping a fault tree into a Bayesian network. Appl. Ocean Res. 2021, 113, 102764. [Google Scholar] [CrossRef]
- Zalewski, P.; Posacka, K. Analysis of ship accidents based on European statistical surveys. Zesz. Nauk. Akad. Morskiej Szczecinie 2021, 68, 17–25. [Google Scholar]
- Fan, S.; Yang, Z. Accident data-driven human fatigue analysis in maritime transport using machine learning. Reliab. Eng. Syst. Saf. 2024, 241, 109675. [Google Scholar] [CrossRef]
- de Vos, J.; Hekkenberg, R.G.; Banda, O.A.V. The impact of autonomous ships on safety at sea—A statistical analysis. Reliab. Eng. Syst. Saf. 2021, 210, 107558. [Google Scholar] [CrossRef]
- Zhang, W.; Zhang, Y. Navigation Risk Assessment of Autonomous Ships Based on Entropy–TOPSIS–Coupling Coordination Model. J. Mar. Sci. Eng. 2023, 11, 422. [Google Scholar] [CrossRef]
- Moon, K.D.; Jeong, C.Y.; Kim, M.S.; Park, Y.K.; Lee, K. Develop and evaluate of intelligent autonomous-ship framework. IOP Conf. Ser. Mater. Sci. Eng. 2020, 929, 012006. [Google Scholar] [CrossRef]
- Kim, M.; Joung, T.-H.; Jeong, B.; Park, H.-S. Autonomous shipping and its impact on regulations, technologies, and industries. J. Int. Marit. Saf. Environ. Aff. Shipp. 2020, 4, 17–25. [Google Scholar] [CrossRef]
- Álvarez, P.S. From maritime salvage to IMO 2020 strategy: Two actions to protect the environment. Mar. Pollut. Bull. 2021, 170, 112590. [Google Scholar] [CrossRef]
- Chang, C.-H.; Kontovas, C.; Yu, Q.; Yang, Z. Risk assessment of the operations of maritime autonomous surface ships. Reliab. Eng. Syst. Saf. 2021, 207, 107324. [Google Scholar] [CrossRef]
- Fenton, A.J.; Chapsos, I. Ships without crews: IMO and UK responses to cybersecurity, technology, law and regulation of maritime autonomous surface ships (MASS). Front. Comput. Sci. 2023, 5, 1151188. [Google Scholar] [CrossRef]
- Kurt, I.; Aymelek, M. Operational and economic advantages of autonomous ships and their perceived impacts on port operations. Marit. Econ. Logist. 2022, 24, 302–326. [Google Scholar] [CrossRef]
- Zhang, X.; Wang, C.; Jiang, L.; An, L.; Yang, R. Collision-avoidance navigation systems for Maritime Autonomous Surface Ships: A state of the art survey. Ocean Eng. 2021, 235, 109380. [Google Scholar] [CrossRef]
- Kim, T.-E.; Perera, L.P.; Sollid, M.-P.; Batalden, B.-M.; Sydnes, A.K. Safety challenges related to autonomous ships in mixed navigational environments. WMU J. Marit. Aff. 2022, 21, 141–159. [Google Scholar] [CrossRef]
- Askari, H.R.; Hossain, M.N. Towards utilizing autonomous ships: A viable advance in industry 4.0. J. Int. Marit. Saf. Environ. Aff. Shipp. 2022, 6, 39–49. [Google Scholar] [CrossRef]
- Munim, Z.H. Autonomous ships: A review, innovative applications and future maritime business models. Supply Chain. Forum Int. J. 2019, 20, 266–279. [Google Scholar] [CrossRef]
- Wang, C.; Cai, X.; Li, Y.; Zhai, R.; Wu, R.; Zhu, S.; Guan, L.; Luo, Z.; Zhang, S.; Zhang, J. Research and Application of Panoramic Visual Perception-Assisted Navigation Technology for Ships. J. Mar. Sci. Eng. 2024, 12, 1042. [Google Scholar] [CrossRef]
- Liu, B.; Wang, S.Z.; Xie, Z.; Zhao, J.; Li, M. Ship recognition and tracking system for intelligent ship based on deep learning framework. TransNav Int. J. Mar. Navig. Saf. Sea Transp. 2019, 13, 699–705. [Google Scholar] [CrossRef]
- Leng, X.; Ji, K.; Zhou, S.; Xing, X. Ship detection based on complex signal kurtosis in single-channel SAR imagery. IEEE Trans. Geosci. Remote Sens. 2019, 57, 6447–6461. [Google Scholar] [CrossRef]
- Wang, S.; Zhang, Y.; Huo, R.; Mao, W. A real-time ship collision risk perception model derived from domain-based approach parameters. Ocean Eng. 2022, 265, 112554. [Google Scholar] [CrossRef]
- Zhou, J.; Jiang, P.; Zou, A.; Chen, X.; Hu, W. Ship target detection algorithm based on improved YOLOv5. J. Mar. Sci. Eng. 2021, 9, 908. [Google Scholar] [CrossRef]
- Garcia-Garcia, B.; Bouwmans, T.; Silva, A.J.R. Background subtraction in real applications: Challenges, current models and future directions. Comput. Sci. Rev. 2020, 35, 100204. [Google Scholar] [CrossRef]
- Chen, X.; Wu, H.; Han, B.; Liu, W.; Montewka, J.; Liu, R.W. Orientation-aware ship detection via a rotation feature decoupling supported deep learning approach. Eng. Appl. Artif. Intell. 2023, 125, 106686. [Google Scholar] [CrossRef]
- Guo, Y.; Lu, Y.; Liu, R.W. Lightweight deep network-enabled real-time low-visibility enhancement for promoting vessel detection in maritime video surveillance. J. Navig. 2022, 75, 230–250. [Google Scholar] [CrossRef]
- Liu, R.W.; Lu, Y.; Guo, Y.; Ren, W.; Zhu, F.; Lv, Y. AiOENet: All-in-one low-visibility enhancement to improve visual perception for intelligent marine vehicles under severe weather conditions. IEEE Trans. Intell. Veh. 2023, 9, 3811–3826. [Google Scholar] [CrossRef]
- Wang, C.; Fan, B.; Li, Y.; Xiao, J.; Min, L.; Zhang, J.; Chen, J.; Lin, Z.; Su, S.; Wu, R. Study on the Classification Perception and Visibility Enhancement of Ship Navigation Environments in Foggy Conditions. J. Mar. Sci. Eng. 2023, 11, 1298. [Google Scholar] [CrossRef]
- Li, S.; Cao, X.; Zhou, Z. Research on inshore ship detection under nighttime low-visibility environment for maritime surveillance. Comput. Electr. Eng. 2024, 118, 109310. [Google Scholar] [CrossRef]
- Yan, H.; Hou, Q.; Zhang, J.; Wang, L.; Zhang, G.; Zhu, D. Scheme to implement moving target detection of coastal defense radar in complicated sea conditions. J. Appl. Remote Sens. 2022, 16, 046510. [Google Scholar] [CrossRef]
- Xu, S.; Zhu, J.; Jiang, J.; Shui, P. Sea-surface floating small target detection by multifeature detector based on isolation forest. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2020, 14, 704–715. [Google Scholar] [CrossRef]
- Rey Charlo, R.E. On-board radio communication and its development in a historical perspective. Int. J. Marit. Hist. 2024, 36, 140–152. [Google Scholar] [CrossRef]
- Xie, C.; Shi, P.; Cao, F.; Qian, Y. Reliability modeling and analysis of ship communication network based on Apriori algorithm. J. Coast. Res. 2019, 93, 711–716. [Google Scholar] [CrossRef]
- Hoole, P.; Ong, S.; Hoole, S. Shore to Ship Steerable Electromagnetic Beam System Based Ship Communication and Navigation. Appl. Comput. Electromagn. Soc. J. 2013, 28, 747–754. [Google Scholar]
- Wang, B.; Ben, K.R.; Hao, Y.X.; Zuo, M.J. SQMCR: Stackelberg Q-learning based Multi-hop Cooperative Routing Algorithm for Underwater Wireless Sensor Networks. IEEE Access 2024, 12, 56179–56195. [Google Scholar]
- Hu, C.; Wu, D.; Liao, Y.; Hu, X. Sliding mode control unified with the uncertainty and disturbance estimator for dynamically positioned vessels subjected to uncertainties and unknown disturbances. Appl. Ocean Res. 2021, 109, 102564. [Google Scholar] [CrossRef]
- Zhao, Z.P.; Zhang, Q. Adaptive self-regulation PID tracking control for the ship course. Chin. J. Ship Res. 2019, 14, 145–151. [Google Scholar]
- Hosseinabadi, P.A.; Abadi, A.S.S.; Mekhilef, S. Fuzzy adaptive finite-time sliding mode controller for trajectory tracking of ship course systems with mismatched uncertainties. Int. J. Autom. Control 2022, 16, 255–271. [Google Scholar] [CrossRef]
- Wang, S.; Er, M.J.; Liu, T.; Gong, H. Path Following Control of Underactuated AUV Based on Improved Model Predictive Control. In Proceedings of the 2023 6th International Conference on Intelligent Autonomous Systems (ICoIAS), Qinhuangdao, China, 22–24 September 2023; pp. 222–227. [Google Scholar]
- Abadi, A.S.S.; Hosseinabadi, P.A.; Mekhilef, S. Fuzzy adaptive fixed-time sliding mode control with state observer for a class of high-order mismatched uncertain systems. Int. J. Control Autom. Syst. 2020, 18, 2492–2508. [Google Scholar] [CrossRef]
- Chen, Z.; Qin, B.; Sun, M.; Sun, Q. Q-learning-based parameters adaptive algorithm for active disturbance rejection control and its application to ship course control. Neurocomputing 2020, 408, 51–63. [Google Scholar] [CrossRef]
- Veitch, E.; Alsos, O.A. A systematic review of human-AI interaction in autonomous ship systems. Saf. Sci. 2022, 152, 105778. [Google Scholar] [CrossRef]
- Dlabač, T.; Ćalasan, M.; Krčum, M.; Marvučić, N. PSO-based PID controller design for ship course-keeping autopilot. Brodogr. Int. J. Nav. Archit. Ocean Eng. Res. Dev. 2019, 70, 1–15. [Google Scholar] [CrossRef]
- Volyanskaya, Y.B.; Volyanskiy, S.M.; Onishchenko, O.A.; Shevchenko, V.A.; Trudnev, S.Y. Research of possibilities to increase the exactness of ship stabilizing on a course. Мoрские интеллектуальные технoлoгии 2019, 3-3, 174–181. [Google Scholar]
- Volyanskyy, S.; Vorokhobin, I.; Volyanskaya, Y.; Mazur, O.; Onishchenko, O. Marine ship’s course stabilization based on an autopilot with a simple fuzzy controller. Sci. Bull. Mircea Cel Batran Nav. Acad. 2022, 25, 23–35. [Google Scholar] [CrossRef]
- Liu, C.; Wang, D.; Zhang, Y.; Meng, X. Model predictive control for path following and roll stabilization of marine vessels based on neurodynamic optimization. Ocean Eng. 2020, 217, 107524. [Google Scholar] [CrossRef]
- Rezaei, A.; Tabatabaei, M. Ship roll stabilization using an adaptive fractional-order sliding mode controller. Ocean Eng. 2023, 287, 115883. [Google Scholar] [CrossRef]
- Sun, M.; Zhang, W.; Zhang, Y.; Luan, T.; Yuan, X.; Li, X. An anti-rolling control method of rudder fin system based on ADRC decoupling and DDPG parameter adjustment. Ocean Eng. 2023, 278, 114306. [Google Scholar] [CrossRef]
- Zhang, Z.; Zhang, X. Course-keeping with roll damping control for ships using rudder and fin. J. Mar. Sci. Technol. 2021, 26, 872–882. [Google Scholar] [CrossRef]
- Qiang, H.; Jin, S.; Feng, X.; Xue, D.; Zhang, L. Model predictive control of a shipborne hydraulic parallel stabilized platform based on ship motion prediction. IEEE Access 2020, 8, 181880–181892. [Google Scholar] [CrossRef]
- You, X.; Li, S.; Liu, J.; Yan, X. Experimental research of the PID tune method for ship path following control. In Proceedings of the ISOPE International Ocean and Polar Engineering Conference, Ottawa, ON, Canada, 19–23 June 2023; p. ISOPE–I-23-364. [Google Scholar]
- Nie, J.; Lin, X. FAILOS guidance law based adaptive fuzzy finite-time path following control for underactuated MSV. Ocean Eng. 2020, 195, 106726. [Google Scholar] [CrossRef]
- Shen, C.; Shi, Y. Distributed implementation of nonlinear model predictive control for AUV trajectory tracking. Automatica 2020, 115, 108863. [Google Scholar] [CrossRef]
- Shen, Z.; Bi, Y.; Wang, Y.; Guo, C. MLP neural network-based recursive sliding mode dynamic surface control for trajectory tracking of fully actuated surface vessel subject to unknown dynamics and input saturation. Neurocomputing 2020, 377, 103–112. [Google Scholar] [CrossRef]
- Zhang, H.; Zhang, X.; Cao, T.; Bu, R. Active disturbance rejection control for ship path following with Euler method. Ocean Eng. 2022, 247, 110516. [Google Scholar] [CrossRef]
- Liu, D.; Yao, C.; Yu, J.; Feng, D.; Sun, X. Trajectory Tracking Control of an Intelligent Ship Based on Deep Reinforcement Learning. In Proceedings of the ISOPE International Ocean and Polar Engineering Conference, Rhodes, Greece, 16–21 June 2024; p. ISOPE–I-24-532. [Google Scholar]
- Li, S.; Xu, C.; Liu, J.; Xu, Z.; Meng, F. Tracking control of ships based on ADRC-MFAC. Chin. J. Ship Res 2023, 18, 1–10. [Google Scholar]
- Yang, C.-H.; Wu, C.-H.; Shao, J.-C.; Wang, Y.-C.; Hsieh, C.-M. AIS-based intelligent vessel trajectory prediction using bi-LSTM. IEEE Access 2022, 10, 24302–24315. [Google Scholar] [CrossRef]
- Min, B.; Zhang, X. Concise robust fuzzy nonlinear feedback track keeping control for ships using multi-technique improved LOS guidance. Ocean Eng. 2021, 224, 108734. [Google Scholar] [CrossRef]
- Li, H.; Chen, H.; Gao, N.; Aϊt-Ahmed, N.; Charpentier, J.-F.; Benbouzid, M. Ship dynamic positioning control based on active disturbance rejection control. J. Mar. Sci. Eng. 2022, 10, 865. [Google Scholar] [CrossRef]
- Papadimitrakis, M.; Stogiannos, M.; Sarimveis, H.; Alexandridis, A. Multi-ship control and collision avoidance using MPC and RBF-based trajectory predictions. Sensors 2021, 21, 6959. [Google Scholar] [CrossRef]
- Huang, Y.; Chen, L.; Chen, P.; Negenborn, R.R.; Van Gelder, P. Ship collision avoidance methods: State-of-the-art. Saf. Sci. 2020, 121, 451–473. [Google Scholar] [CrossRef]
- Ding, Z. A ship-motion prediction algorithm based on modified covariance method and neural networks. In Proceedings of the International Conference on Computer Application and Information Security (ICCAIS 2021), Wuhan, China, 18–19 December 2021; pp. 272–278. [Google Scholar]
- He, Y.; Li, Z.; Mou, J.; Hu, W.; Li, L.; Wang, B. Collision-avoidance path planning for multi-ship encounters considering ship manoeuvrability and COLREGs. Transp. Saf. Environ. 2021, 3, 103–113. [Google Scholar] [CrossRef]
- Kim, J.H.; Lee, S.; Jin, E.S. Collision avoidance based on predictive probability using Kalman filter. Int. J. Nav. Archit. Ocean Eng. 2022, 14, 100438. [Google Scholar] [CrossRef]
- Abebe, M.; Noh, Y.; Kang, Y.-J.; Seo, C.; Kim, D.; Seo, J. Ship trajectory planning for collision avoidance using hybrid ARIMA-LSTM models. Ocean Eng. 2022, 256, 111527. [Google Scholar] [CrossRef]
- Liu, K.; Yuan, Z.; Xin, X.; Zhang, J.; Wang, W. Conflict detection method based on dynamic ship domain model for visualization of collision risk Hot-Spots. Ocean Eng. 2021, 242, 110143. [Google Scholar] [CrossRef]
- Szlapczynski, R.; Szlapczynska, J. A ship domain-based model of collision risk for near-miss detection and Collision Alert Systems. Reliab. Eng. Syst. Saf. 2021, 214, 107766. [Google Scholar] [CrossRef]
- Liu, R.W.; Huo, X.; Liang, M.; Wang, K. Ship collision risk analysis: Modeling, visualization and prediction. Ocean Eng. 2022, 266, 112895. [Google Scholar] [CrossRef]
- Liu, D.; Shi, G. Ship collision risk assessment based on collision detection algorithm. IEEE Access 2020, 8, 161969–161980. [Google Scholar] [CrossRef]
- Xin, X.; Liu, K.; Yang, Z.; Zhang, J.; Wu, X. A probabilistic risk approach for the collision detection of multi-ships under spatiotemporal movement uncertainty. Reliab. Eng. Syst. Saf. 2021, 215, 107772. [Google Scholar] [CrossRef]
- Shi, J.; Liu, Z. Track pairs collision detection with applications to ship collision risk assessment. J. Mar. Sci. Eng. 2022, 10, 216. [Google Scholar] [CrossRef]
- Perera, L.; Carvalho, J.; Guedes Soares, C. Fuzzy logic based decision making system for collision avoidance of ocean navigation under critical collision conditions. J. Mar. Sci. Technol. 2011, 16, 84–99. [Google Scholar] [CrossRef]
- Park, J.; Jeong, J.-S. An estimation of ship collision risk based on relevance vector machine. J. Mar. Sci. Eng. 2021, 9, 538. [Google Scholar] [CrossRef]
- Chen, P.; Huang, Y.; Papadimitriou, E.; Mou, J.; van Gelder, P. An improved time discretized non-linear velocity obstacle method for multi-ship encounter detection. Ocean Eng. 2020, 196, 106718. [Google Scholar] [CrossRef]
- Tengesdal, T.; Johansen, T.A.; Brekke, E.F. Ship collision avoidance utilizing the cross-entropy method for collision risk assessment. IEEE Trans. Intell. Transp. Syst. 2021, 23, 11148–11161. [Google Scholar] [CrossRef]
- Cheng, Z.; Chen, P.; Mou, J.; Chen, L. Novel collision risk measurement method for multi-ship encounters via velocity obstacles and temporal proximity. Ocean Eng. 2024, 302, 117585. [Google Scholar] [CrossRef]
- Li, S.; Liu, J.; Negenborn, R.R.; Ma, F. Optimizing the joint collision avoidance operations of multiple ships from an overall perspective. Ocean Eng. 2019, 191, 106511. [Google Scholar] [CrossRef]
- Zhu, Z.; Yin, Y.; Lyu, H. Automatic collision avoidance algorithm based on route-plan-guided artificial potential field method. Ocean Eng. 2023, 271, 113737. [Google Scholar] [CrossRef]
- Ren, J.; Zhang, J.; Cui, Y. Autonomous obstacle avoidance algorithm for unmanned surface vehicles based on an improved velocity obstacle method. ISPRS Int. J. Geo-Inf. 2021, 10, 618. [Google Scholar] [CrossRef]
- Zhang, L.; Mou, J.; Chen, P.; Li, M. Path planning for autonomous ships: A hybrid approach based on improved apf and modified vo methods. J. Mar. Sci. Eng. 2021, 9, 761. [Google Scholar] [CrossRef]
- Xu, X.; Lu, Y.; Liu, G.; Cai, P.; Zhang, W. COLREGs-abiding hybrid collision avoidance algorithm based on deep reinforcement learning for USVs. Ocean Eng. 2022, 247, 110749. [Google Scholar] [CrossRef]
- Yang, Z.; Jing, Q.; Li, X. Dynamic Data-Driven Ship Motion Simulation toward Visual-Aided Navigation on Water. Water 2023, 15, 872. [Google Scholar] [CrossRef]
- Chen, X.; Dou, S.; Song, T.; Wu, H.; Sun, Y.; Xian, J. Spatial-Temporal Ship Pollution Distribution Exploitation and Harbor Environmental Impact Analysis via Large-Scale AIS Data. J. Mar. Sci. Eng. 2024, 12, 960. [Google Scholar] [CrossRef]
- Nguyen, D.; Fablet, R. A transformer network with sparse augmented data representation and cross entropy loss for ais-based vessel trajectory prediction. IEEE Access 2024, 12, 21596–21609. [Google Scholar] [CrossRef]
- Zhu, J.; Gao, M.; Zhang, A.; Hu, Y.; Zeng, X. Multi-ship encounter situation identification and analysis based on AIS data and graph complex network theory. J. Mar. Sci. Eng. 2022, 10, 1536. [Google Scholar] [CrossRef]
- Rong, H.; Teixeira, A.; Soares, C.G. Ship collision avoidance behaviour recognition and analysis based on AIS data. Ocean Eng. 2022, 245, 110479. [Google Scholar] [CrossRef]
- Öztürk, Ü.; Boz, H.A.; Balcisoy, S. Visual analytic based ship collision probability modeling for ship navigation safety. Expert Syst. Appl. 2021, 175, 114755. [Google Scholar] [CrossRef]
- He, W.; Lei, J.; Chu, X.; Xie, S.; Zhong, C.; Li, Z. A visual analysis approach to understand and explore quality problems of AIS data. J. Mar. Sci. Eng. 2021, 9, 198. [Google Scholar] [CrossRef]
- Carter, E. Enhancing Maritime Navigation Safety through AIS-Based Visual Augmentation: A Deep Learning Approach to Integrating Real and Virtual Views. J. Comput. Sci. Softw. Appl. 2023, 3, 21–26. [Google Scholar]
- Xia, R.; Chen, J.; Huang, Z.; Wan, H.; Wu, B.; Sun, L.; Yao, B.; Xiang, H.; Xing, M. CRTransSar: A visual transformer based on contextual joint representation learning for SAR ship detection. Remote Sens. 2022, 14, 1488. [Google Scholar] [CrossRef]
- Chen, Z.; Ding, Z.; Zhang, X.; Wang, X.; Zhou, Y. Inshore ship detection based on multi-modality saliency for synthetic aperture radar images. Remote Sens. 2023, 15, 3868. [Google Scholar] [CrossRef]
- Mou, X.; Chen, X.; Guan, J.; Chen, B.; Dong, Y. Marine target detection based on improved faster R-CNN for navigation radar PPI images. In Proceedings of the 2019 International Conference on Control, Automation and Information Sciences (ICCAIS), Chengdu, China, 23–26 October 2019; pp. 1–5. [Google Scholar]
- Hsieh, T.-H.; Wang, S.; Gong, H.; Liu, W.; Xu, N. Sea ice warning visualization and path planning for ice navigation based on radar image recognition. J. Mar. Sci. Technol. 2021, 29, 280–290. [Google Scholar] [CrossRef]
- Naus, K.; Wąż, M.; Szymak, P.; Gucma, L.; Gucma, M. Assessment of ship position estimation accuracy based on radar navigation mark echoes identified in an Electronic Navigational Chart. Measurement 2021, 169, 108630. [Google Scholar] [CrossRef]
- Chen, X.; Mu, X.; Guan, J.; Liu, N.; Zhou, W. Marine target detection based on Marine-Faster R-CNN for navigation radar plane position indicator images. Front. Inf. Technol. Electron. Eng. 2022, 23, 630–643. [Google Scholar] [CrossRef]
- Li, Z.; Pan, M.; Hu, J.; Guo, J. Design on ship “video radar” enhanced navigation system based on multi-camera. In Proceedings of the 2022 5th International Conference on Signal Processing and Machine Learning, Dalian, China, 4–6 August 2022; pp. 47–53. [Google Scholar]
- Xu, X.; Wu, B.; Xie, L.; Teixeira, Â.P.; Yan, X. A novel ship speed and heading estimation approach using radar sequential images. IEEE Trans. Intell. Transp. Syst. 2023, 24, 11107–11120. [Google Scholar] [CrossRef]
- Zhou, A.; Xie, W.; Pei, J. Background modeling combined with multiple features in the Fourier domain for maritime infrared target detection. IEEE Trans. Geosci. Remote Sens. 2021, 60, 1–15. [Google Scholar] [CrossRef]
- Dong, L.; Ma, D.; Qin, G.; Zhang, T.; Xu, W. Infrared target detection in backlighting maritime environment based on visual attention model. Infrared Phys. Technol. 2019, 99, 193–200. [Google Scholar] [CrossRef]
- Liu, Z.; He, J.; Zhang, T.; Tang, R.; Li, Y.; Waqas, M. Infrared ship video target tracking based on cross-connection and spatial transformer network. In Proceedings of the International Conference on Artificial Intelligence and Security, Qinghai, China, 15–20 July 2022; pp. 100–114. [Google Scholar]
- Cao, Y.; Cheng, W.; Wang, X.; Huang, Y. Research on Ship Target Recognition based on Infrared Image Method. In Proceedings of the 2023 4th International Conference on Computing, Networks and Internet of Things, Xiamen, China, 26–28 May 2023; pp. 197–202. [Google Scholar]
- Gao, Z.; Zhang, Y.; Wang, S. Lightweight Small Ship Detection Algorithm Combined with Infrared Characteristic Analysis for Autonomous Navigation. J. Mar. Sci. Eng. 2023, 11, 1114. [Google Scholar] [CrossRef]
- Park, J.-H.; Roh, M.-I.; Lee, H.-W.; Jo, Y.-M.; Ha, J.; Son, N.-S. Multi-vessel Target Tracking with Camera Fusion for Unmanned Surface Vehicles. Int. J. Nav. Archit. Ocean Eng. 2024, 16, 100608. [Google Scholar] [CrossRef]
- Li, Y.; Tao, K.; Li, X.; Wang, F. Research on Visual Laser Navigation of Ships. In Proceedings of the 2019 5th International Conference on Transportation Information and Safety (ICTIS), Liverpool, UK, 14–17 July 2019; pp. 191–196. [Google Scholar]
- Pan, M.; Liu, Y.; Cao, J.; Li, Y.; Li, C.; Chen, C.-H. Visual recognition based on deep learning for navigation mark classification. IEEE Access 2020, 8, 32767–32775. [Google Scholar] [CrossRef]
- Shao, Z.; Lyu, H.; Yin, Y.; Cheng, T.; Gao, X.; Zhang, W.; Jing, Q.; Zhao, Y.; Zhang, L. Multi-scale object detection model for autonomous ship navigation in maritime environment. J. Mar. Sci. Eng. 2022, 10, 1783. [Google Scholar] [CrossRef]
- Bi, Q.; Wang, M.; Huang, Y.; Lai, M.; Liu, Z.; Bi, X. Ship Collision Avoidance Navigation Signal Recognition via Vision Sensing and Machine Forecasting. IEEE Trans. Intell. Transp. Syst. 2023, 24, 11743–11755. [Google Scholar] [CrossRef]
- Qu, J.; Liu, R.W.; Guo, Y.; Lu, Y.; Su, J.; Li, P. Improving maritime traffic surveillance in inland waterways using the robust fusion of AIS and visual data. Ocean Eng. 2023, 275, 114198. [Google Scholar] [CrossRef]
- Gülsoylu, E.; Koch, P.; Yildiz, M.; Constapel, M.; Kelm, A.P. Image and AIS Data Fusion Technique for Maritime Computer Vision Applications. In Proceedings of the IEEE/CVF Winter Conference on Applications of Computer Vision, Waikoloa, HI, USA, 3–8 January 2024; pp. 859–868. [Google Scholar]
- Ding, H.; Weng, J. A robust assessment of inland waterway collision risk based on AIS and visual data fusion. Ocean Eng. 2024, 307, 118242. [Google Scholar] [CrossRef]
- Guo, M.; Guo, C.; Zhang, C.; Zhang, D.; Gao, Z. Fusion of ship perceptual information for electronic navigational chart and radar images based on deep learning. J. Navig. 2020, 73, 192–211. [Google Scholar] [CrossRef]
- Zhang, C.; Fang, M.; Yang, C.; Yu, R.; Li, T. Perceptual fusion of electronic chart and marine radar image. J. Mar. Sci. Eng. 2021, 9, 1245. [Google Scholar] [CrossRef]
- Gao, Z.; Zhu, F.; Chen, H.; Ma, B. Maritime Infrared and Visible Image Fusion Based on Refined Features Fusion and Sobel Loss. Photonics 2022, 9, 566. [Google Scholar] [CrossRef]
- Jeon, R.; Jones, N. Visual and Infrared Detection and Ranging (VAIDAR) for Marine Navigational Hazards. In Proceedings of the OCEANS 2023-MTS/IEEE US Gulf Coast, Biloxi, MI, USA, 25–28 September 2023; pp. 1–6. [Google Scholar]
- Sun, S.; Lyu, H.; Dong, C. AIS aided marine radar target tracking in a detection occluded environment. Ocean Eng. 2023, 288, 116133. [Google Scholar] [CrossRef]
- Xu, X.; Wu, B.; Teixeira, Â.P.; Yan, X.; Soares, C.G. Integration of Radar Sequential Images and AIS for Ship Speed and Heading Estimation Under Uncertainty. IEEE Trans. Intell. Transp. Syst. 2023, 25, 5688–5702. [Google Scholar] [CrossRef]
- Wu, Y.; Chu, X.; Deng, L.; Lei, J.; He, W.; Królczyk, G.; Li, Z. A new multi-sensor fusion approach for integrated ship motion perception in inland waterways. Measurement 2022, 200, 111630. [Google Scholar] [CrossRef]
- Xiao, G.; Xu, L. Challenges and Opportunities of Maritime Transport in the Post-Epidemic Era. J. Mar. Sci. Eng. 2024, 12, 1685. [Google Scholar] [CrossRef]

Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, Y.; Chen, X.; Wu, Y.; Zhao, J.; Postolache, O.; Liu, S. Visual Navigation Systems for Maritime Smart Ships: A Survey. J. Mar. Sci. Eng. 2024, 12, 1781. https://doi.org/10.3390/jmse12101781
Wang Y, Chen X, Wu Y, Zhao J, Postolache O, Liu S. Visual Navigation Systems for Maritime Smart Ships: A Survey. Journal of Marine Science and Engineering. 2024; 12(10):1781. https://doi.org/10.3390/jmse12101781
Chicago/Turabian StyleWang, Yuqing, Xinqiang Chen, Yuzhen Wu, Jiansen Zhao, Octavian Postolache, and Shuhao Liu. 2024. "Visual Navigation Systems for Maritime Smart Ships: A Survey" Journal of Marine Science and Engineering 12, no. 10: 1781. https://doi.org/10.3390/jmse12101781
APA StyleWang, Y., Chen, X., Wu, Y., Zhao, J., Postolache, O., & Liu, S. (2024). Visual Navigation Systems for Maritime Smart Ships: A Survey. Journal of Marine Science and Engineering, 12(10), 1781. https://doi.org/10.3390/jmse12101781