Metric Reliability Analysis of Autonomous Marine LiDAR Systems under Extreme Wind Loads


Abstract
:1. Introduction
2. Related Works
2.1. Static Measurement Accuracy Optimization for LiDAR Systems
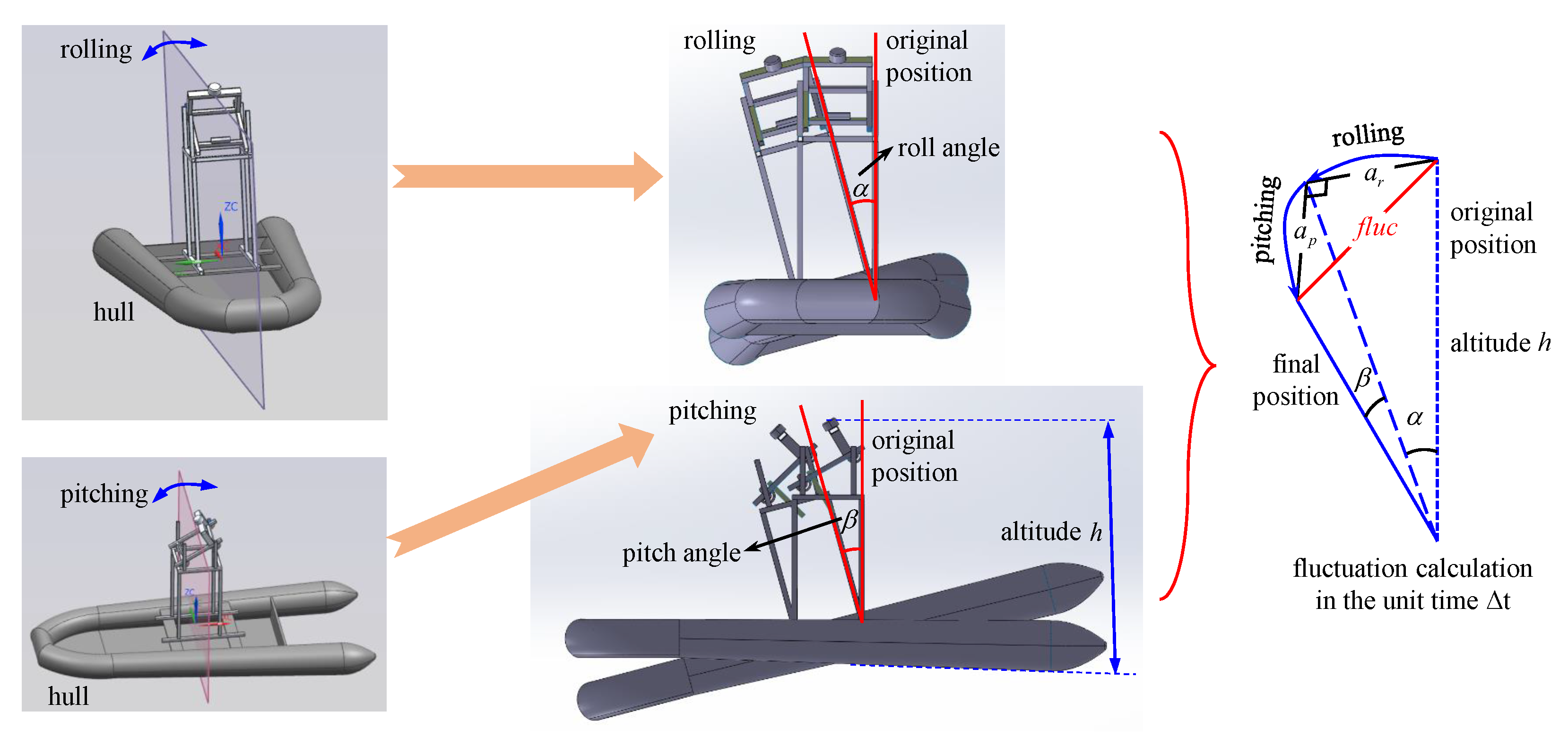
2.2. Hull Roll and Pitch Characteristics under Extreme Wind Loads
2.3. Metric Reliability Analysis of Dynamic LiDAR Systems
3. Methodology
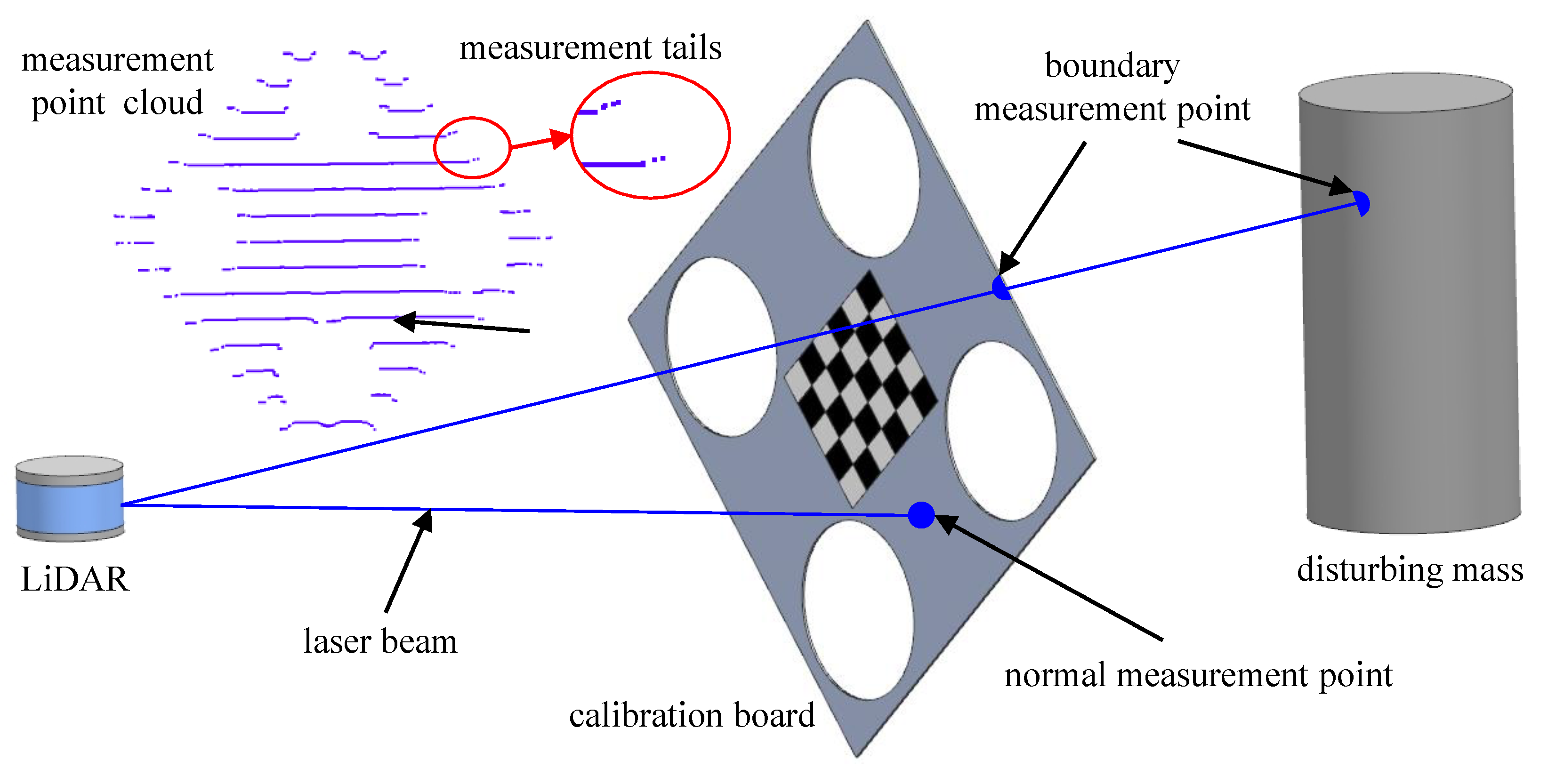
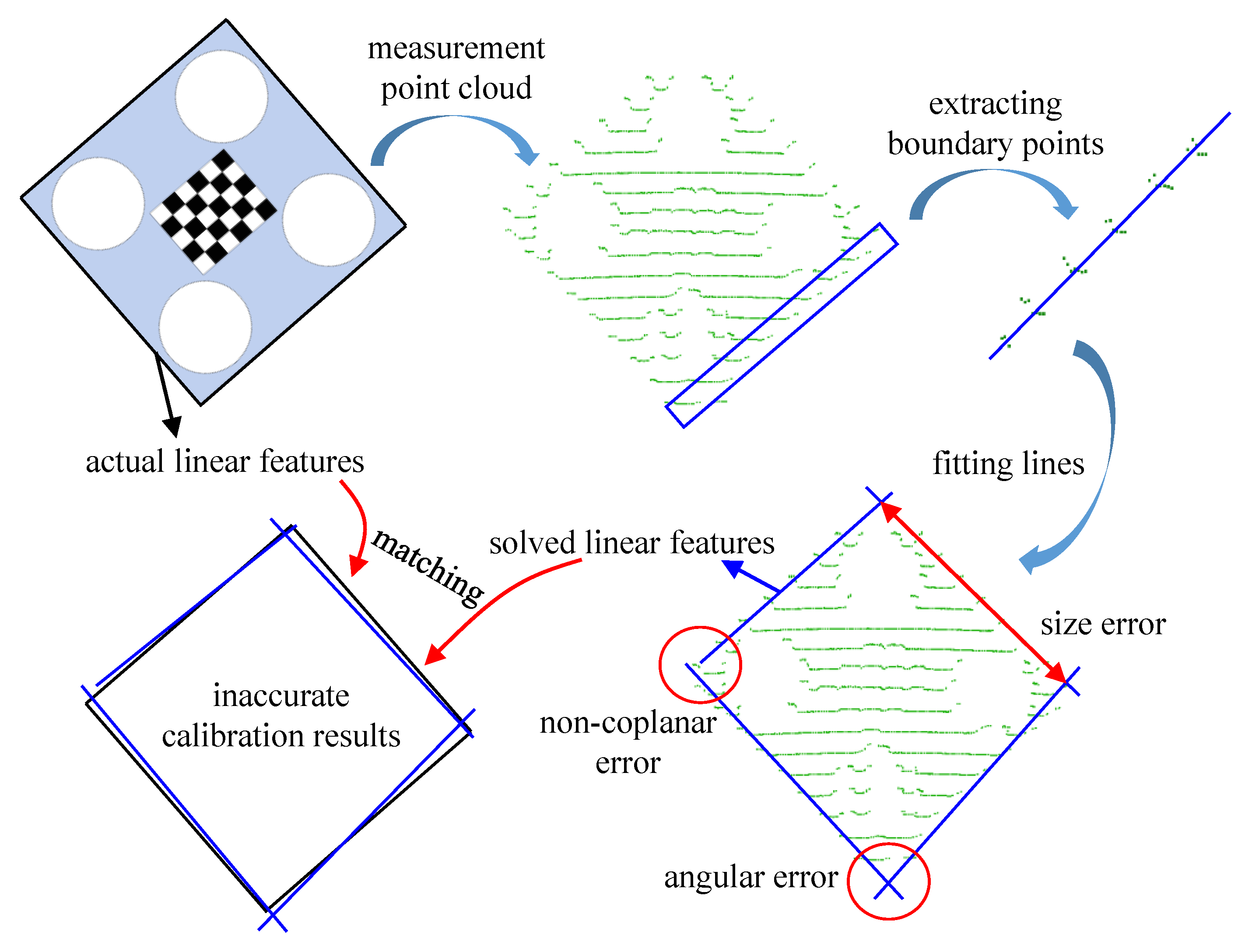
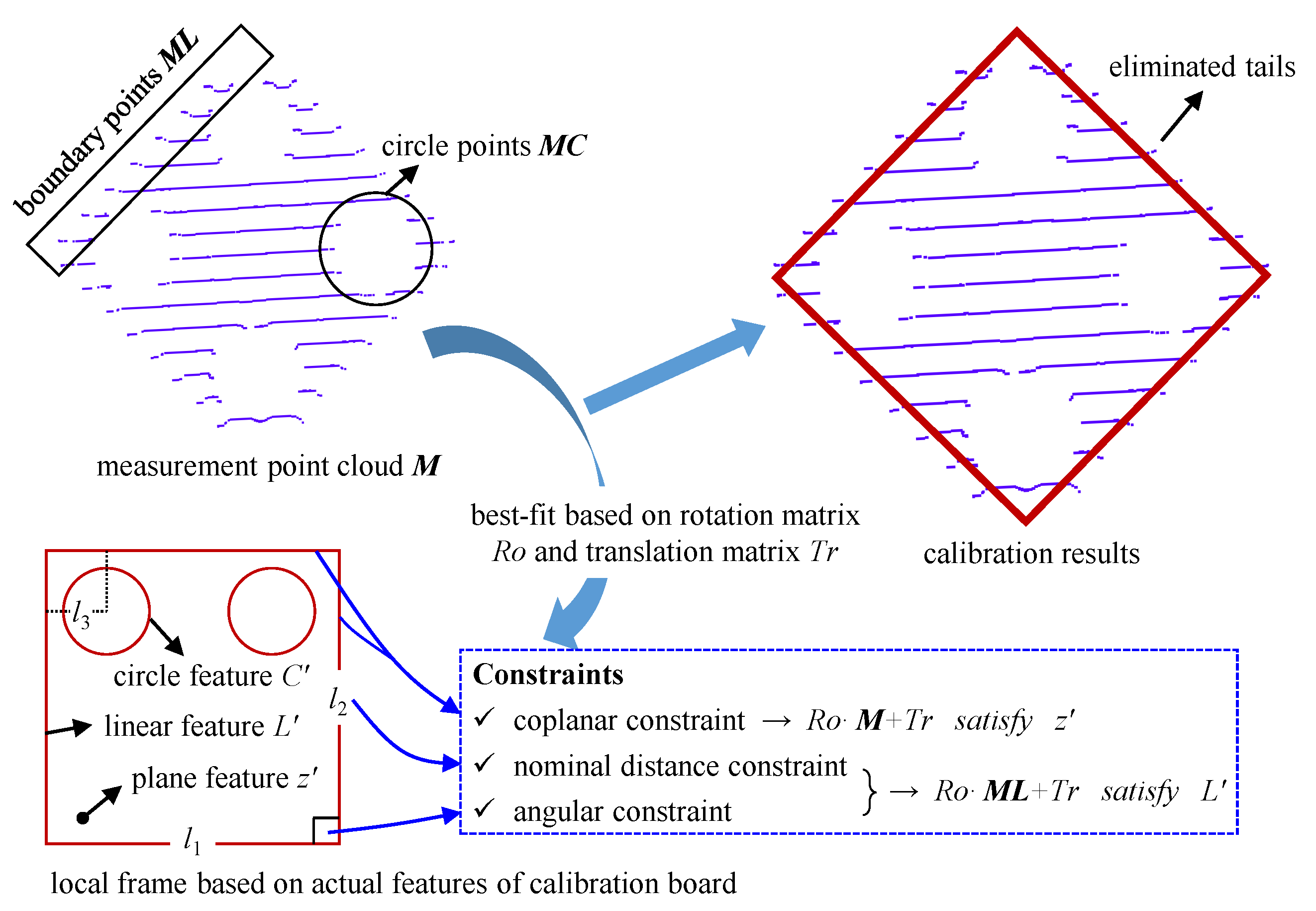
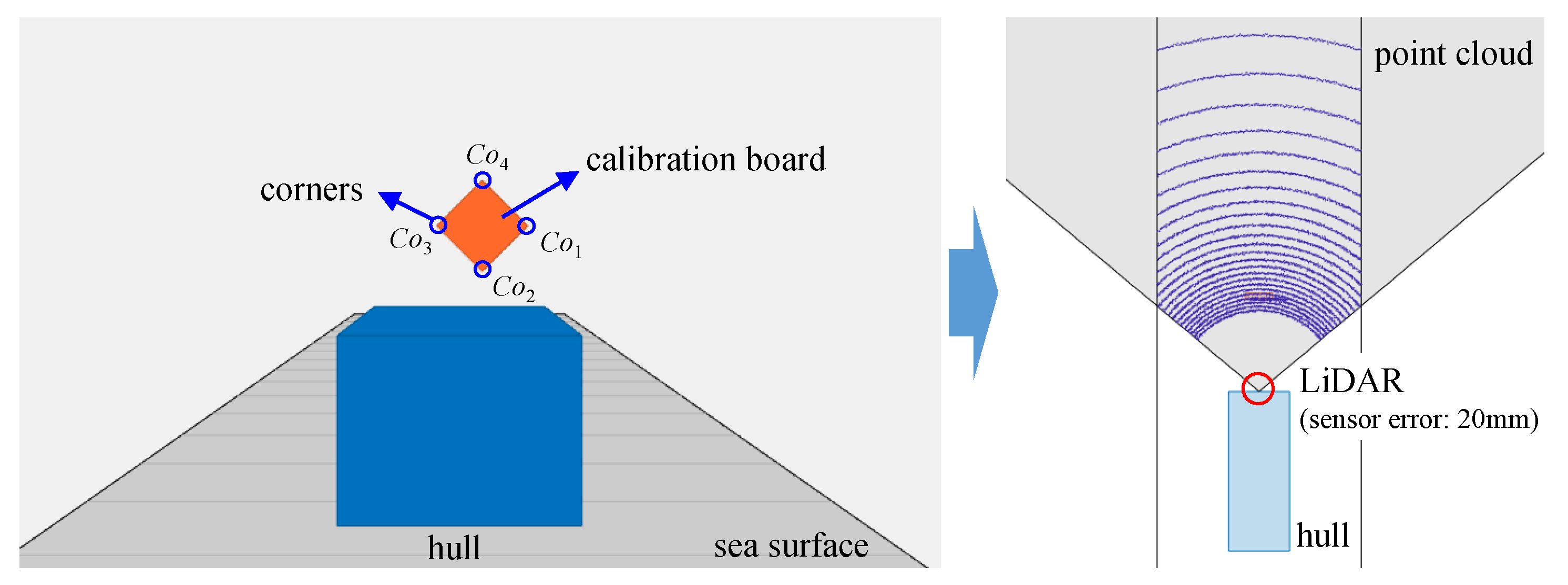
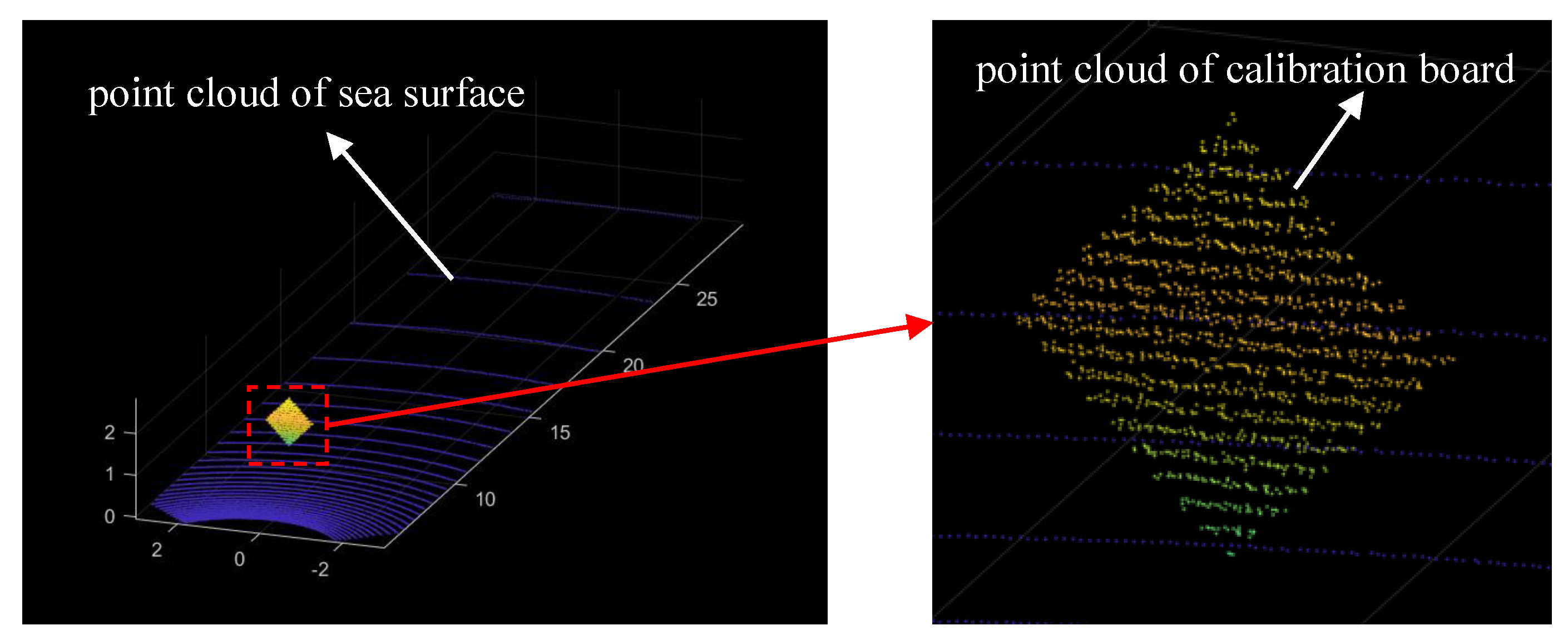
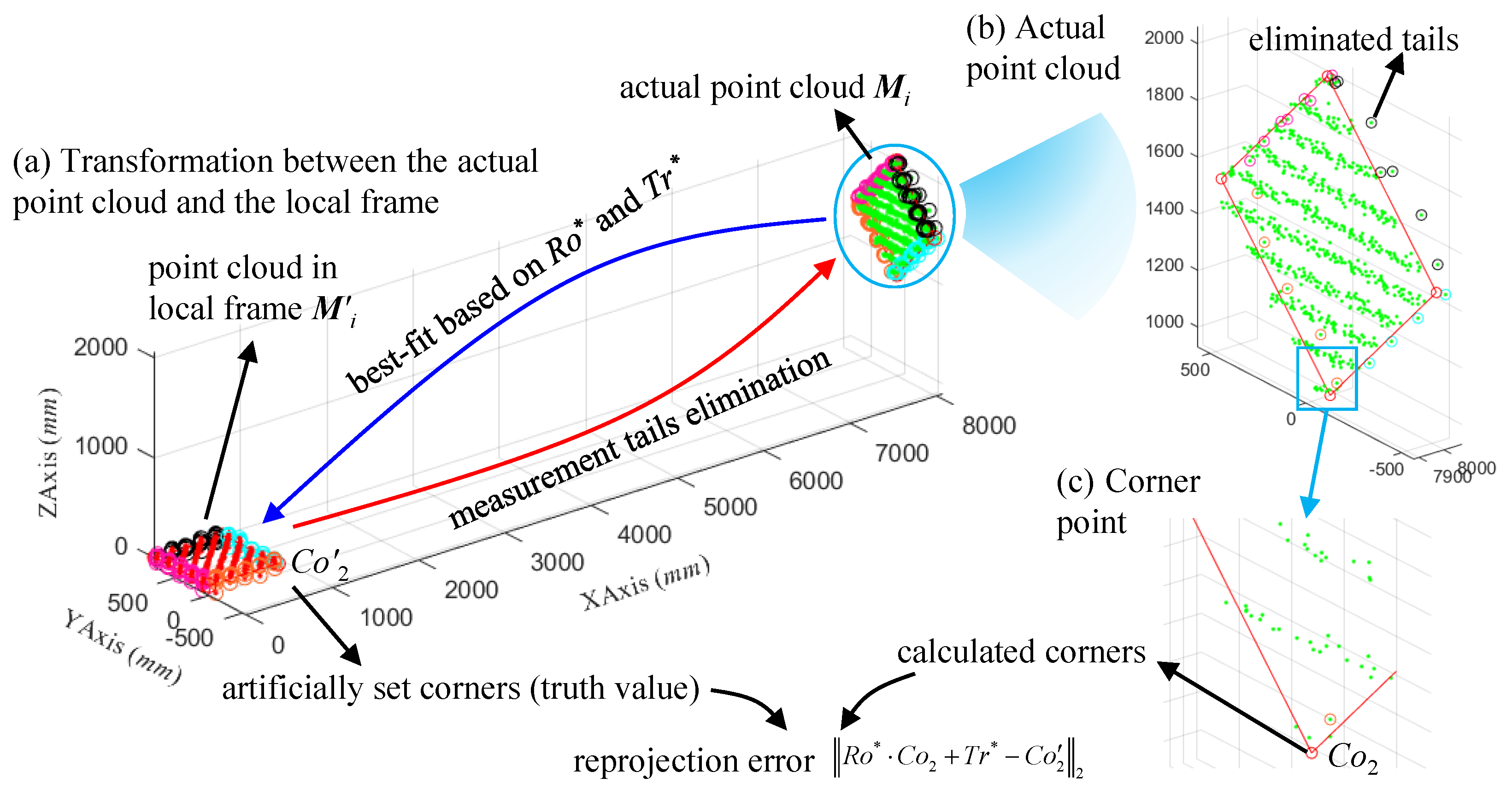
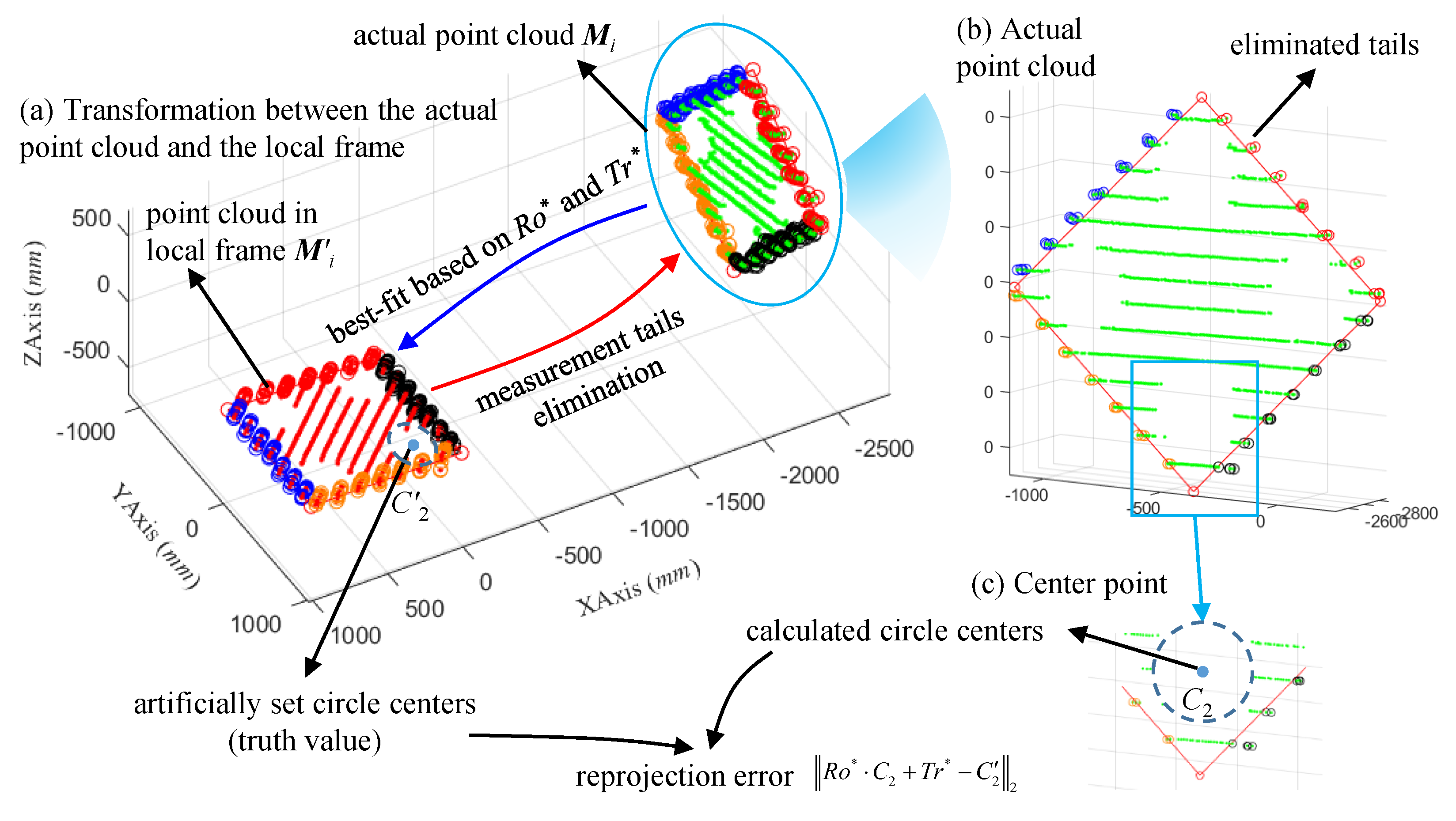
3.1. Accuracy Evaluation Model of LiDAR Measurements
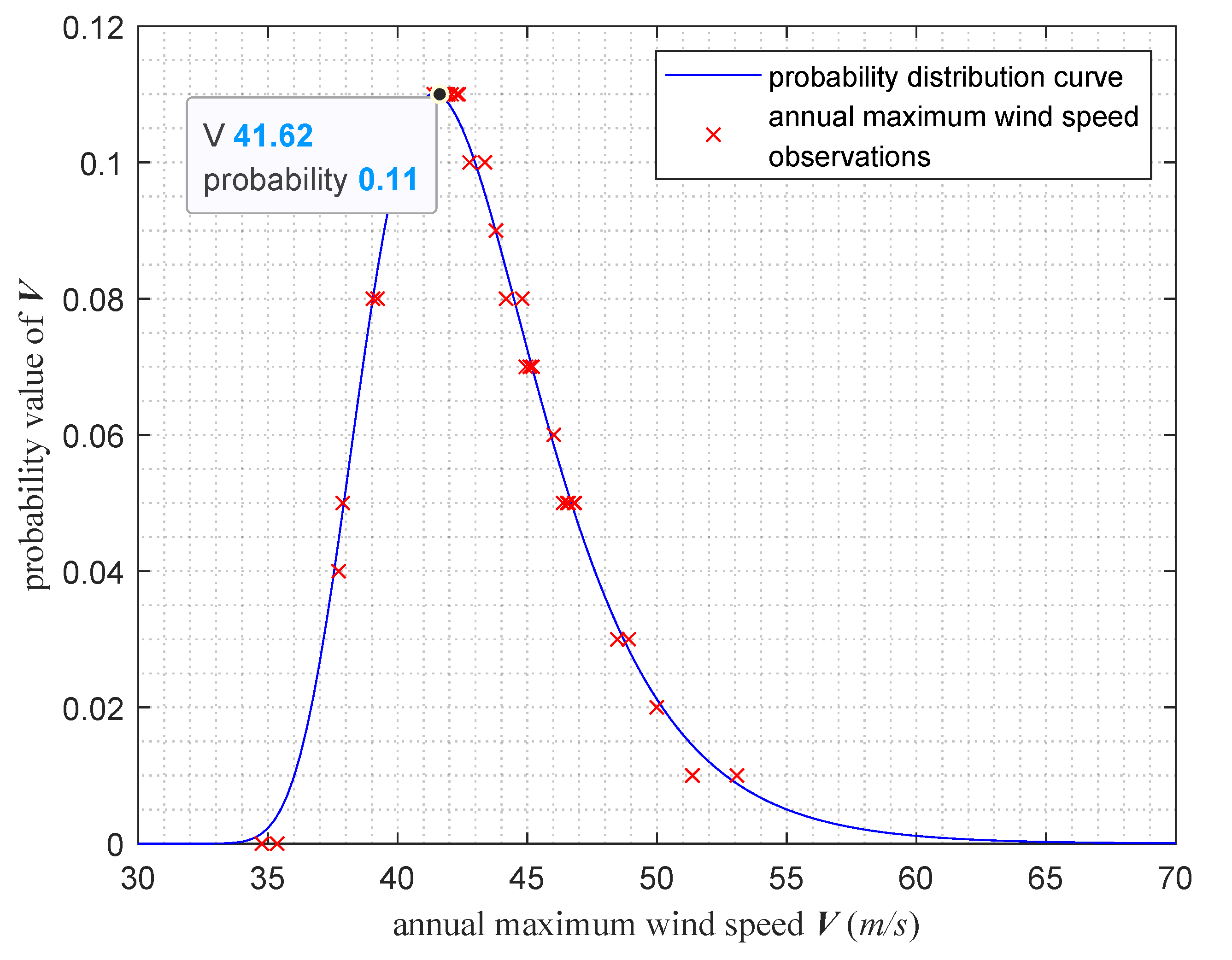
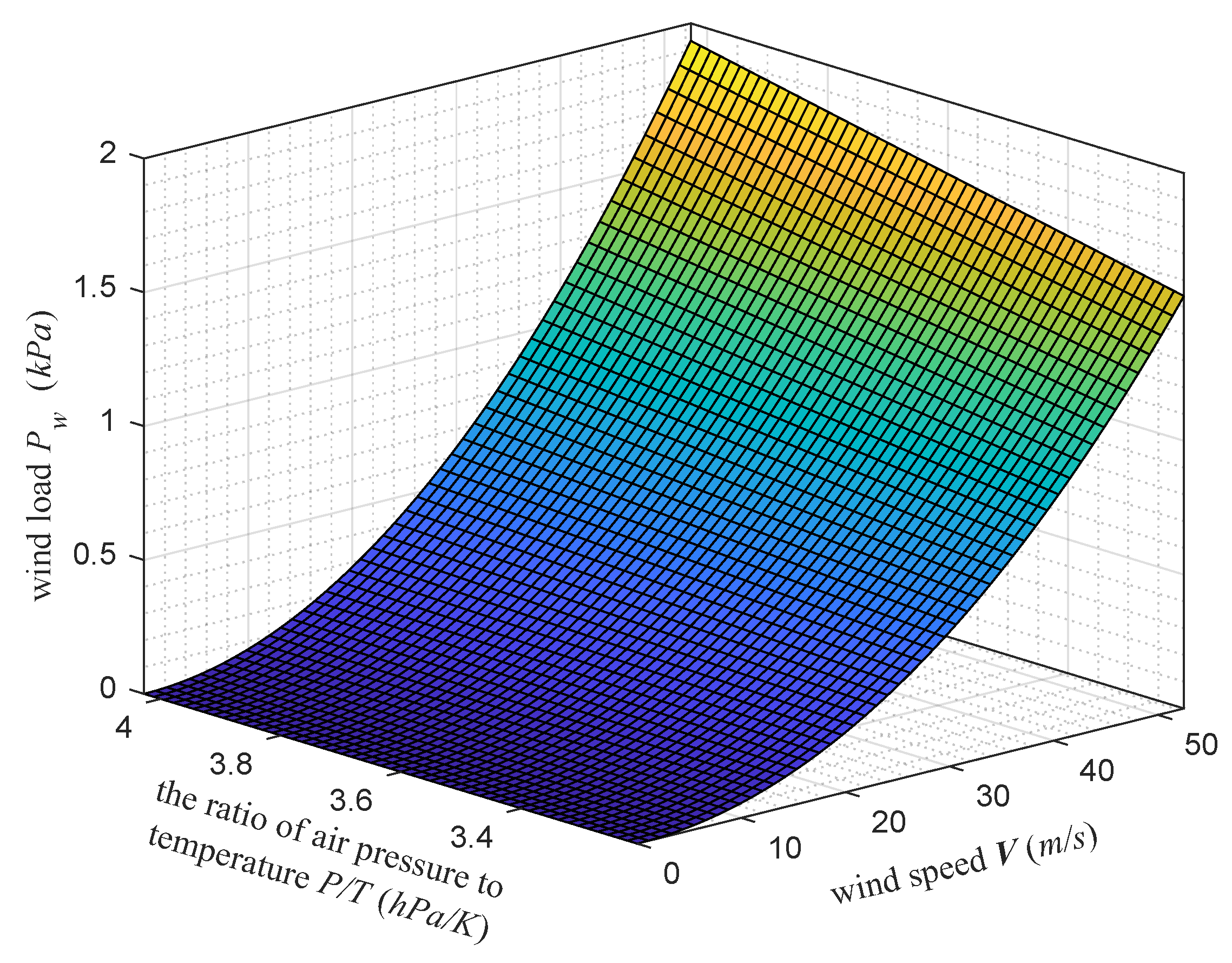
3.2. Establishment of Wind Load Probability Model
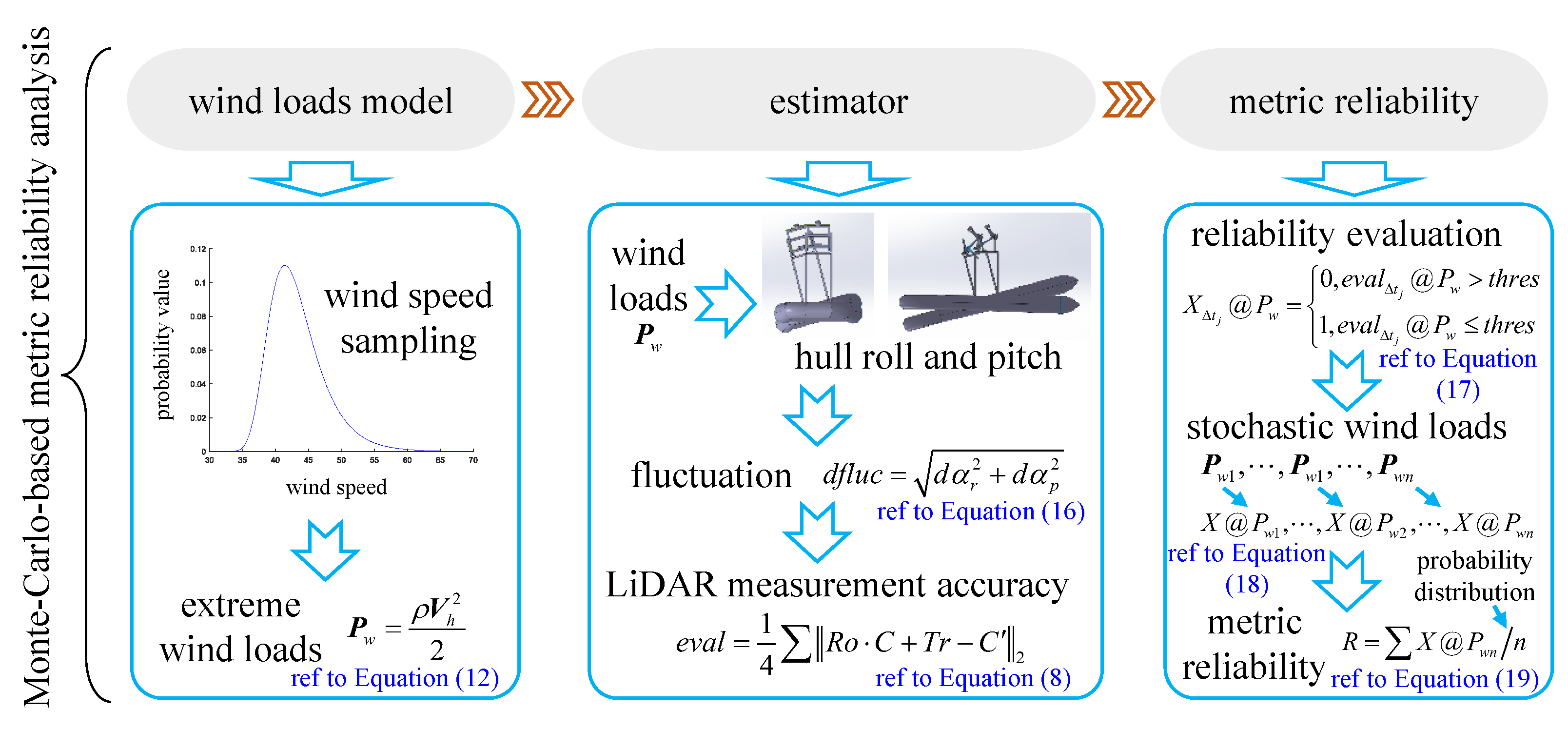
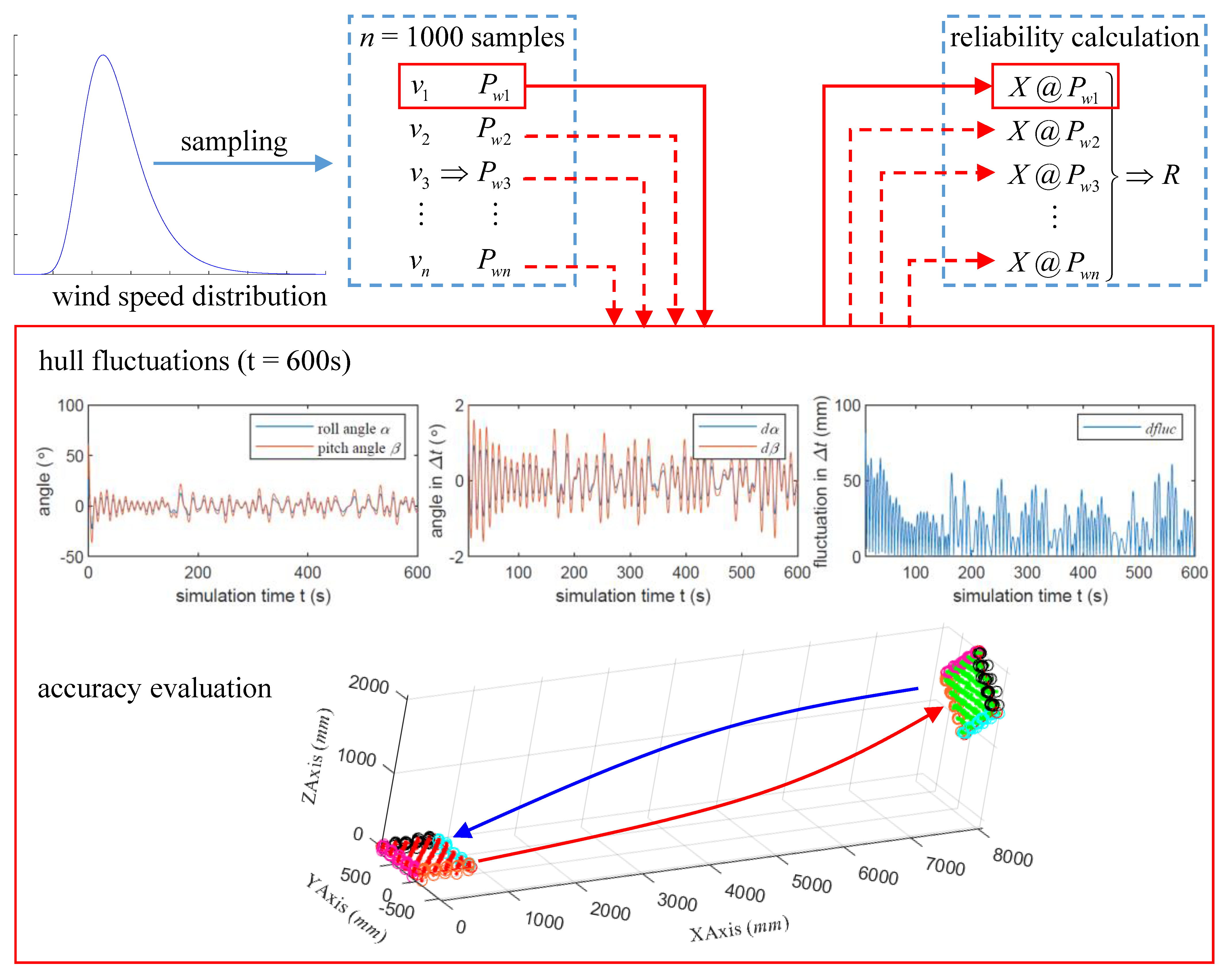
3.3. Monte-Carlo-Based Metric Reliability Analysis
4. Experiments
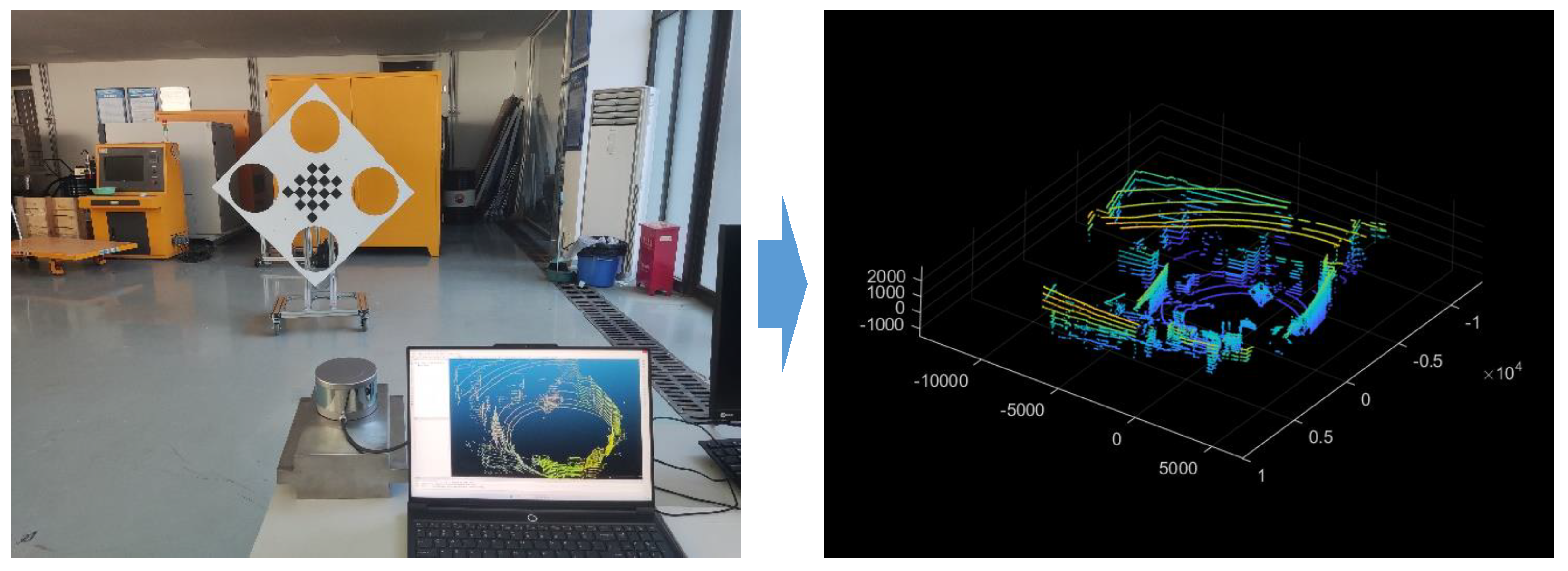
4.1. Accuracy Evaluation of LiDAR Measurements
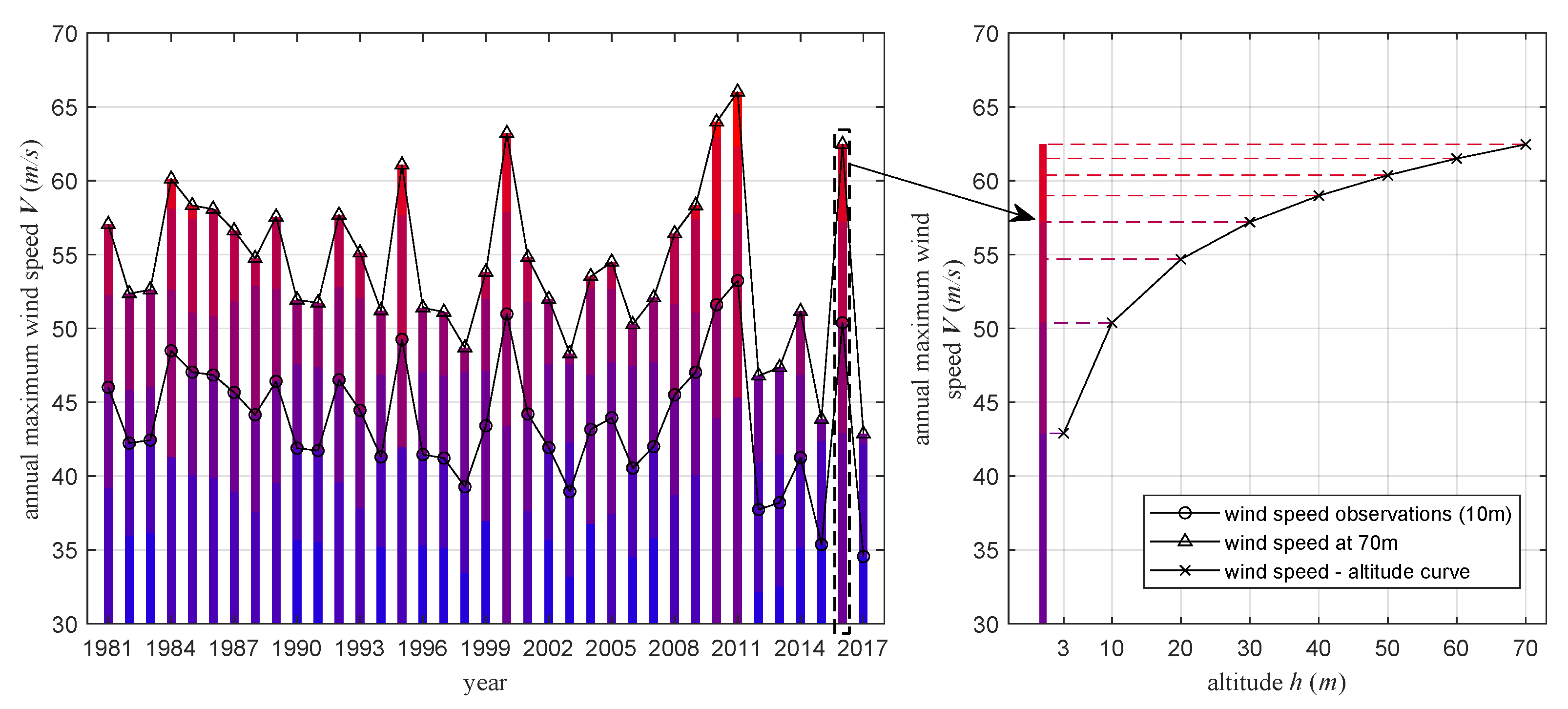
4.2. Sea Surface Wind Field Investigation and Wind Load Analysis
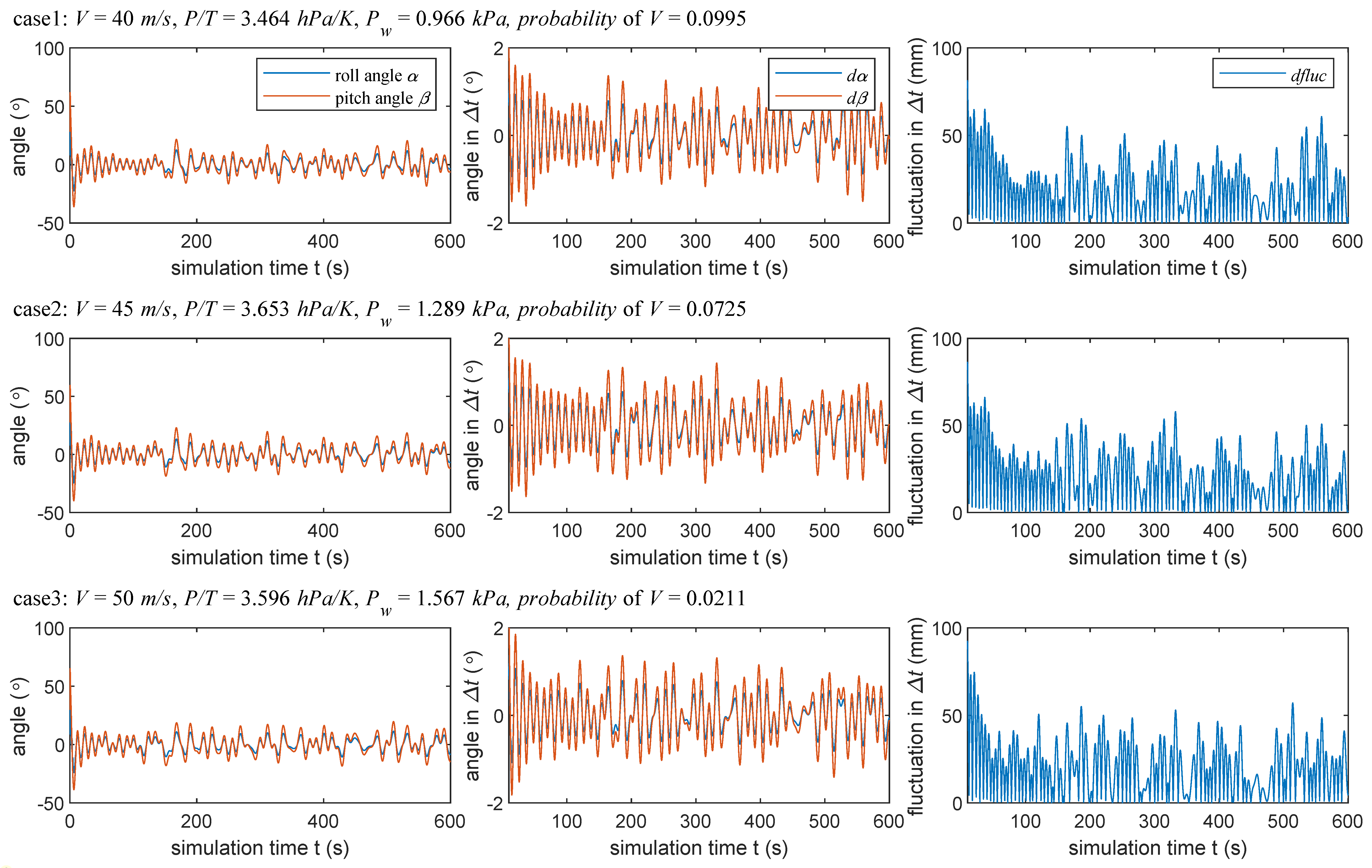
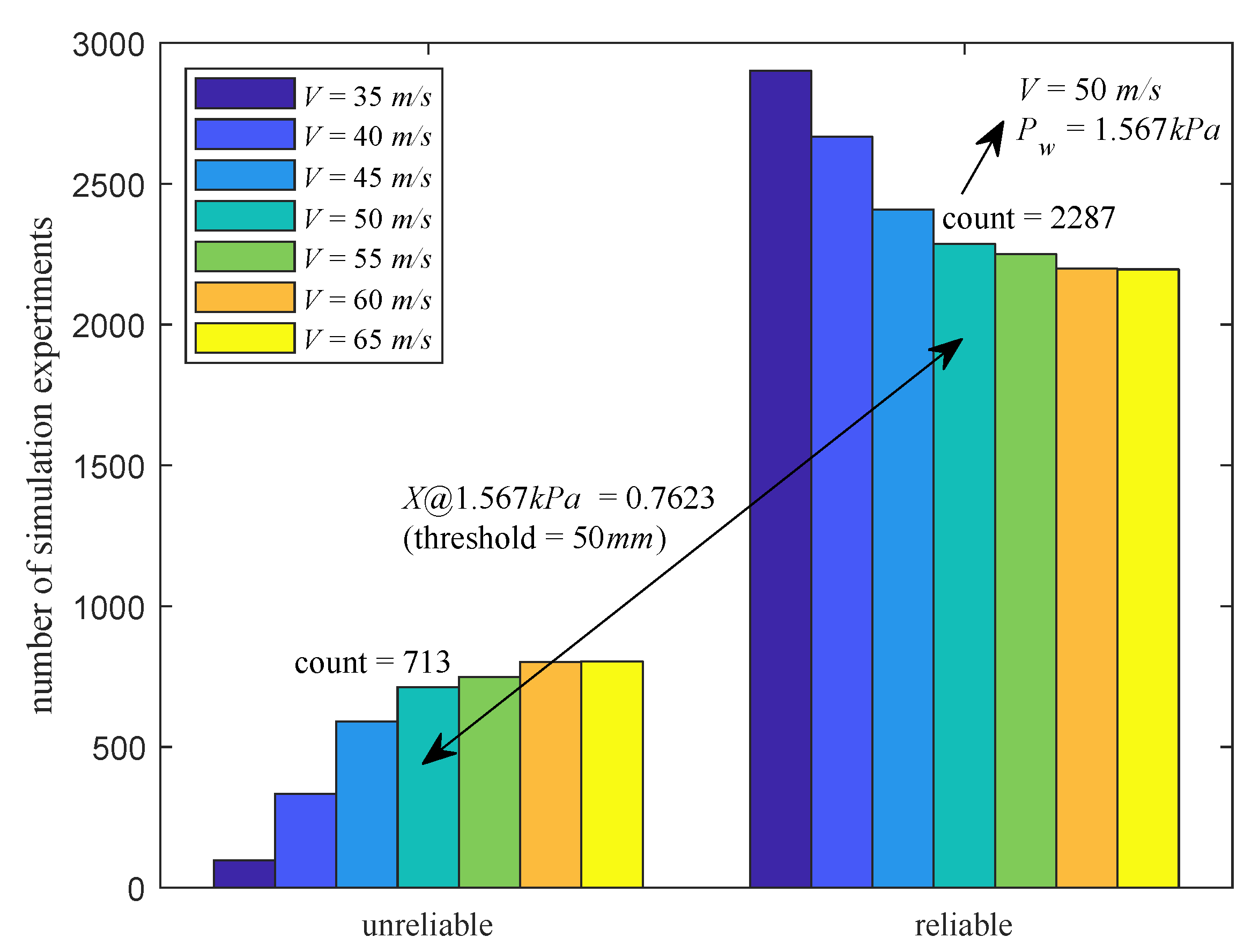
4.3. Metric Reliability Analysis of LiDAR Systems under Extreme Wind Loads
5. Discussion
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Lee, P.; Theotokatos, G.; Boulougouris, E.; Bolbot, V. Risk-Informed Collision Avoidance System Design for Maritime Autonomous Surface Ships. Ocean Eng. 2023, 279, 113750. [Google Scholar] [CrossRef]
- Zhang, D.; Han, Z.; Zhang, K.; Zhang, J.; Zhang, M.; Zhang, F. Use of Hybrid Causal Logic Method for Preliminary Hazard Analysis of Maritime Autonomous Surface Ships. J. Mar. Sci. Eng. 2022, 10, 725. [Google Scholar] [CrossRef]
- Zhang, M.; Zhang, D.; Yao, H.; Zhang, K. A Probabilistic Model of Human Error Assessment for Autonomous Cargo Ships Focusing on Human-Autonomy Collaboration. Saf. Sci. 2020, 130, 104838. [Google Scholar] [CrossRef]
- Clunie, T.; DeFilippo, M.; Sacarny, M.; Robinette, P. Development of a Perception System for an Autonomous Surface Vehicle using Monocular Camera, LIDAR, and Marine RADAR. In Proceedings of the 2021 IEEE International Conference on Robotics and Automation (ICRA), Xi’an, China, 30 May–5 June 2021; pp. 14112–14119. [Google Scholar] [CrossRef]
- Lee, S.J.; Moon, Y.S.; Ko, N.Y.; Choi, H.T.; Lee, J.M. A Method for Object Detection Using Point Cloud Measurement in the Sea Environment. In Proceedings of the 2017 IEEE Underwater Technology (UT), Busan, Republic of Korea, 21–24 February 2017. [Google Scholar] [CrossRef]
- Stanislas, L.; Dunbabin, M. Multimodal Sensor Fusion for Robust Obstacle Detection and Classification in the Maritime RobotX Challenge. IEEE J. Ocean. Eng. 2019, 44, 343–351. [Google Scholar] [CrossRef]
- Stateczny, A.; Kazimierski, W.; Burdziakowski, P.; Motyl, W.; Wisniewska, M. Shore Construction Detection by Automotive Radar for the Needs of Autonomous Surface Vehicle Navigation. ISPRS Int. J. Geo-Inf. 2019, 8, 80. [Google Scholar] [CrossRef]
- Han, J.; Cho, Y.; Kim, J.; Kim, J.; Son, N.s.; Kim, S.Y. Autonomous Collision Detection and Avoidance for ARAGON USV: Development and Field Tests. J. Field Robot. 2020, 37, 987–1002. [Google Scholar] [CrossRef]
- Wang, H.; Yin, Y.; Jing, Q. Comparative Analysis of 3D LiDAR Scan-Matching Methods for State Estimation of Autonomous Surface Vessel. J. Mar. Sci. Eng. 2023, 11, 840. [Google Scholar] [CrossRef]
- Hu, B.; Liu, X.; Jing, Q.; Lyu, H.; Yin, Y. Estimation of Berthing State of Maritime Autonomous Surface Ships based on 3D LiDAR. Ocean Eng. 2022, 251, 111131. [Google Scholar] [CrossRef]
- Chen, Y.; Chen, Y. Reliability Evaluation of Sight Distance on Mountainous Expressway Using 3D Mobile Mapping. In Proceedings of the 2019 5th International Conference on Transportation Information and Safety (ICTIS), Liverpool, UK, 14–17 July 2019; pp. 1024–1030. [Google Scholar] [CrossRef]
- Wen, X.; Hu, J.; Chen, H.; Huang, S.; Hu, H.; Zhang, H. Research on an Adaptive Method for the Angle Calibration of Roadside LiDAR Point Clouds. Sensors 2023, 23, 7542. [Google Scholar] [CrossRef]
- Canavosio-Zuzelski, R.; Hogarty, J.; Rodarmel, C.; Lee, M.; Braun, A. Assessing Lidar Accuracy with Hexagonal Retro-Reflective Targets. Photogramm. Eng. Remote Sens. 2013, 79, 663–670. [Google Scholar] [CrossRef]
- Nguyen, T.T.; Cheng, C.H.; Liu, D.G.; Le, M.H. Improvement of Accuracy and Precision of the LiDAR System Working in High Background Light Conditions. Electronics 2022, 11, 45. [Google Scholar] [CrossRef]
- Zhang, Y.; Wu, T.; Zhang, X.; Sun, Y.; Wang, Y.; Li, S.; Li, X.; Zhong, K.; Yan, Z.; Xu, D.; et al. Rayleigh Lidar Signal Denoising Method Combined with WT, EEMD and LOWESS to Improve Retrieval Accuracy. Remote Sens. 2022, 14, 3270. [Google Scholar] [CrossRef]
- Cheng, X.; Mao, J.; Li, J.; Zhao, H.; Zhou, C.; Gong, X.; Rao, Z. An EEMD-SVD-LWT Algorithm for Denoising a Lidar Signal. Measurement 2021, 168, 108405. [Google Scholar] [CrossRef]
- Tuley, J.; Vandapel, N.; Hebert, A. Analysis and Removal of Artifacts in 3-D LADAR Data. In Proceedings of the 2005 IEEE International Conference on Robotics and Automation (ICRA), Barcelona, Spain, 18–22 April 2005; pp. 2203–2210. [Google Scholar] [CrossRef]
- Cifuentes, R.; Van der Zande, D.; Salas, C.; Farifteh, J.; Coppin, P. Correction of Erroneous LiDAR Measurements in Artificial Forest Canopy Experimental Setups. Forests 2014, 5, 1565–1583. [Google Scholar] [CrossRef]
- Perez-Canosa, J.M.; Orosa, J.A.; Lamas Galdo, M.I.; Cartelle Barros, J.J. A New Theoretical Dynamic Analysis of Ship Rolling Motion Considering Navigational Parameters, Loading Conditions and Sea State Conditions. J. Mar. Sci. Eng. 2022, 10, 1646. [Google Scholar] [CrossRef]
- Htun, S.S.; Umeda, N.; Sakai, M.; Matsuda, A.; Terada, D. Water-on-deck effects on roll motions of an offshore supply vessel in regular stern quartering waves. Ocean Eng. 2019, 188, 106225. [Google Scholar] [CrossRef]
- Chou, J.S.; Truong, D.N. Multiobjective Optimization Inspired by Behavior of Jellyfish for Solving Structural Design Problems. Chaos Solitons Fractals 2020, 135, 109738. [Google Scholar] [CrossRef]
- Hostettler, R.; Schon, T.B. Auxiliary-Particle-Filter-based Two-Filter Smoothing for Wiener State-Space Models. In Proceedings of the 2018 21st International Conference on Information Fusion (FUSION), Cambridge, UK, 10–13 July 2018; pp. 1904–1911. [Google Scholar] [CrossRef]
- Esedoglu, S.; Jacobs, M. Convolution Kernels and Stability of Threshold Dynamics Methods. SIAM J. Numer. Anal. 2017, 55, 2123–2150. [Google Scholar] [CrossRef]
- Mahboub, V.; Ebrahimzadeh, S.; Saadatseresht, M.; Faramarzi, M. On Robust Constrained Kalman Filter for Dynamic Errors-in-Variables model. Surv. Rev. 2020, 52, 253–260. [Google Scholar] [CrossRef]
- Wei, Y.; Chen, Z.; Zhao, C.; Tu, Y.; Chen, X.; Yang, R. An Ensemble Multi-Step Forecasting Model for Ship Roll Motion under Different External Conditions: A Case Study on the South China Sea. Measurement 2022, 201, 111679. [Google Scholar] [CrossRef]
- Li, Y.; Wei, Z.; Kapitaniak, T.; Zhang, W. Stochastic Bifurcation and Chaos Analysis for a Class of Ships Rolling Motion under Non-Smooth Perturbation and Random Excitation. Ocean Eng. 2022, 266, 112859. [Google Scholar] [CrossRef]
- Wang, Y.; Yao, W.; Zhang, B.; Fu, J.; Yang, J.; Sun, G. DRR-LIO: A Dynamic-Region-Removal-Based LiDAR Inertial Odometry in Dynamic Environments. IEEE Sens. J. 2023, 23, 13175–13185. [Google Scholar] [CrossRef]
- Li, J.; Bi, Y.; Li, K.; Wu, L.; Cao, J.; Hao, Q. Improving the Accuracy of TOF LiDAR Based on Balanced Detection Method. Sensors 2023, 23, 4020. [Google Scholar] [CrossRef]
- Shan, T.; Englot, B.; Meyers, D.; Wang, W.; Ratti, C.; Rus, D. LIO-SAM: Tightly-coupled Lidar Inertial Odometry via Smoothing and Mapping. In Proceedings of the 2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Las Vegas, NV, USA, 24 October 2020–24 January 2021; pp. 5135–5142. [Google Scholar] [CrossRef]
- Wu, W.; Wang, W. LiDAR Inertial Odometry Based on Indexed Point and Delayed Removal Strategy in Highly Dynamic Environments. Sensors 2023, 23, 5188. [Google Scholar] [CrossRef]
- Wu, Q.; Meng, Q.; Tian, Y.; Zhou, Z.; Luo, C.; Mao, W.; Zeng, P.; Zhang, B.; Luo, Y. A Method of Calibration for the Distortion of LiDAR Integrating IMU and Odometer. Sensors 2022, 22, 6716. [Google Scholar] [CrossRef]
- Zhang, B.; Zhang, X.; Wei, B.; Qi, C. A Point Cloud Distortion Removing and Mapping Algorithm based on Lidar and IMU UKF Fusion. In Proceedings of the 2019 IEEE/ASME International Conference on Advanced Intelligent Mechatronics (AIM), Hong Kong, China, 8–12 July 2019; pp. 966–971. [Google Scholar] [CrossRef]
- Xu, F.; Li, F.; Wang, Y. Modified Levenberg-Marquardt-Based Optimization Method for LiDAR Waveform Decomposition. IEEE Geosci. Remote Sens. Lett. 2016, 13, 530–534. [Google Scholar] [CrossRef]
- Chiodi, R.; Ricciardelli, F. Three Issues Concerning the Statistics of Mean and Extreme Wind Speeds. J. Wind Eng. Ind. Aerodyn. 2014, 125, 156–167. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Points | Coordinates in Local Frame (mm) | Distance Error (mm) | |
|---|---|---|---|
| truth value without tail elimination proposed method | − | ||
| truth value without tail elimination proposed method | − | ||
| truth value without tail elimination proposed method | − | ||
| truth value without tail elimination proposed method | − | ||
| average | without tail elimination proposed method | − | |
| Points | Coordinates in Local Frame (mm) | Distance Error (mm) | |
|---|---|---|---|
| truth value without tail elimination proposed method | − | ||
| truth value without tail elimination proposed method | − | ||
| truth value without tail elimination proposed method | − | ||
| truth value without tail elimination proposed method | − | ||
| average | without tail elimination proposed method | − | |
| Year | Annual Maximum Wind Speed V (m/s) | Air Pressure P () | Air Temperature T (°C) |
|---|---|---|---|
| 1981 | 45.8 | 998.0 | −4.0 |
| 1982 | 41.7 | 990.2 | 3.0 |
| 1983 | 41.7 | 1006.0 | 10.2 |
| … | … | … | … |
| 2015 | 35.0 | 1012.2 | 1.0 |
| 2016 | 49.9 | 975.0 | −2.0 |
| 2017 | 34.0 | 995.0 | −2.0 |
| Annual Maximum Wind Speed (m/s) | Wind Load (kPa) | Probability of V | Indicator | Reliability R |
|---|---|---|---|---|
| 35 | 0.735 | 0.0023 | 0.9527 | 0.7540 |
| 40 | 0.966 | 0.0995 | 0.8690 | |
| 45 | 1.289 | 0.0725 | 0.8080 | |
| 50 | 1.567 | 0.0211 | 0.7623 | |
| 55 | 1.966 | 0.0050 | 0.7647 | |
| 60 | 2.340 | 0.0011 | 0.7300 | |
| 65 | 2.958 | 0.0003 | 0.7540 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liang, B.; Zhao, W.; Wang, X.; Wang, X.; Liu, Z. Metric Reliability Analysis of Autonomous Marine LiDAR Systems under Extreme Wind Loads. J. Mar. Sci. Eng. 2024, 12, 50. https://doi.org/10.3390/jmse12010050
Liang B, Zhao W, Wang X, Wang X, Liu Z. Metric Reliability Analysis of Autonomous Marine LiDAR Systems under Extreme Wind Loads. Journal of Marine Science and Engineering. 2024; 12(1):50. https://doi.org/10.3390/jmse12010050
Chicago/Turabian StyleLiang, Bing, Wenhao Zhao, Xin Wang, Xiaobang Wang, and Zhijie Liu. 2024. "Metric Reliability Analysis of Autonomous Marine LiDAR Systems under Extreme Wind Loads" Journal of Marine Science and Engineering 12, no. 1: 50. https://doi.org/10.3390/jmse12010050
APA StyleLiang, B., Zhao, W., Wang, X., Wang, X., & Liu, Z. (2024). Metric Reliability Analysis of Autonomous Marine LiDAR Systems under Extreme Wind Loads. Journal of Marine Science and Engineering, 12(1), 50. https://doi.org/10.3390/jmse12010050