
Mean Drift Wave Forces on Arrays of Bodies Surrounded by Thin Porous Surfaces



Abstract
1. Introduction
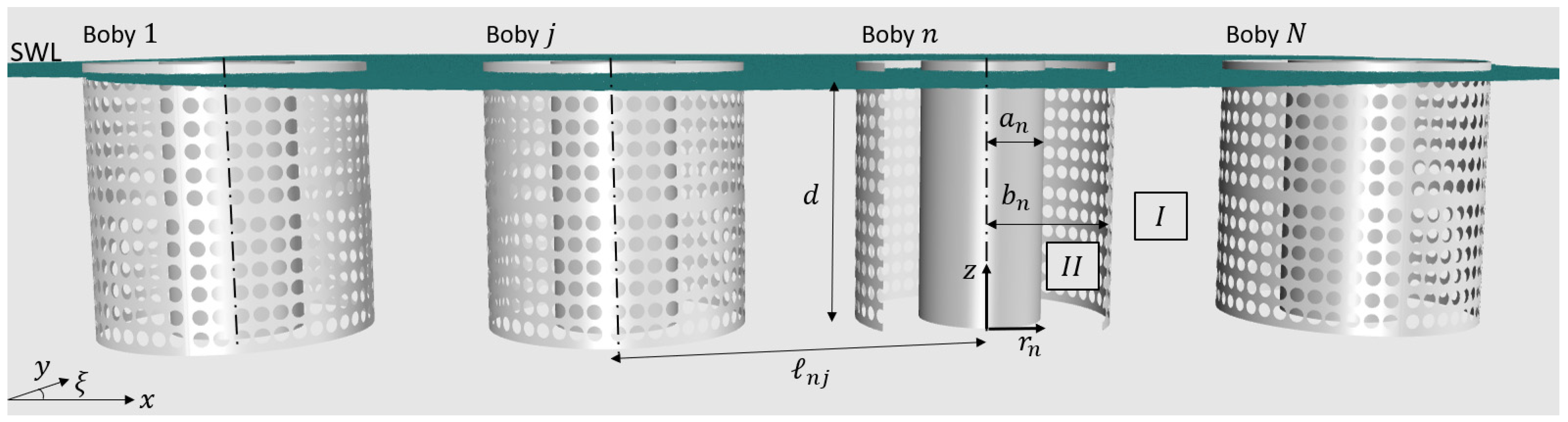
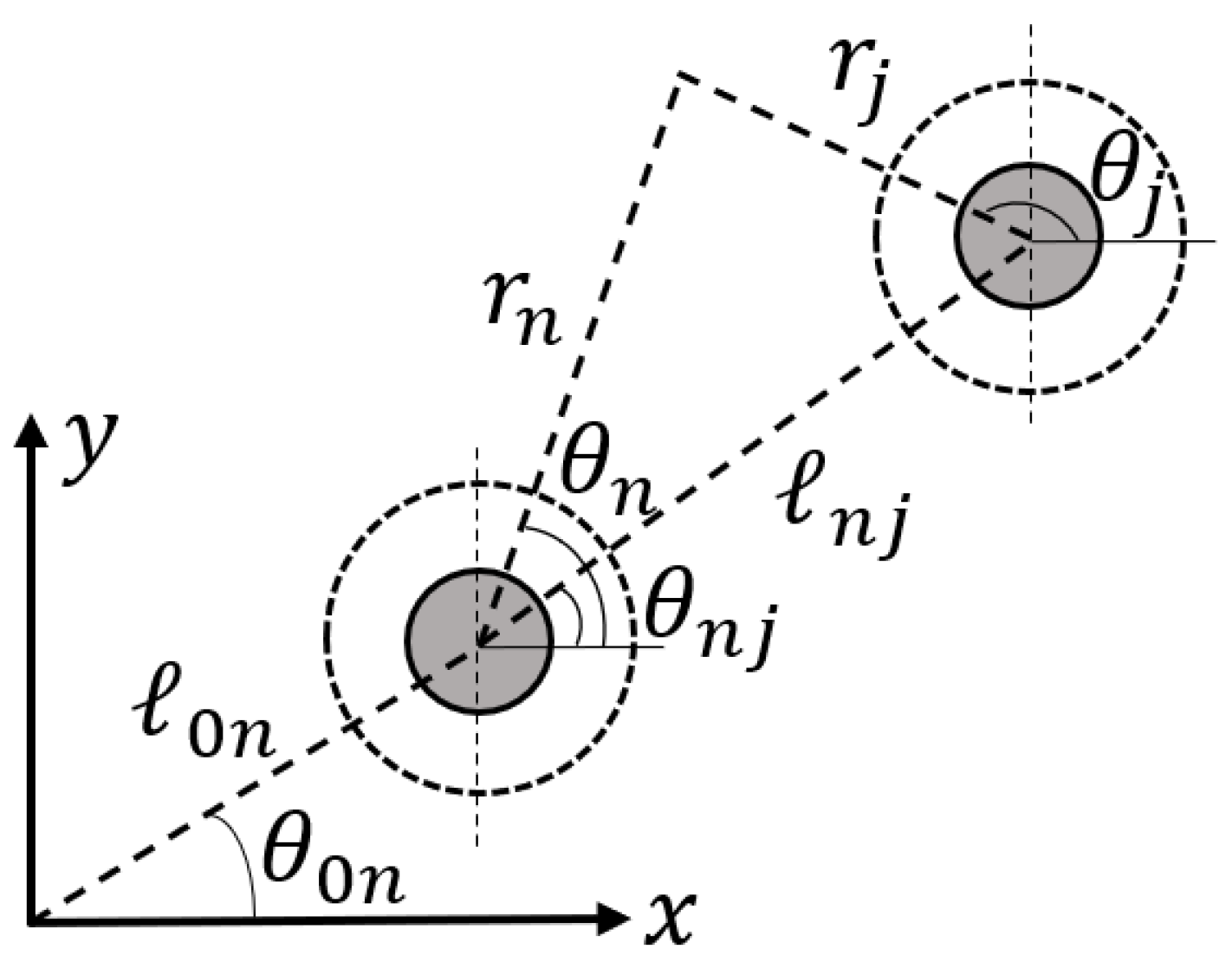
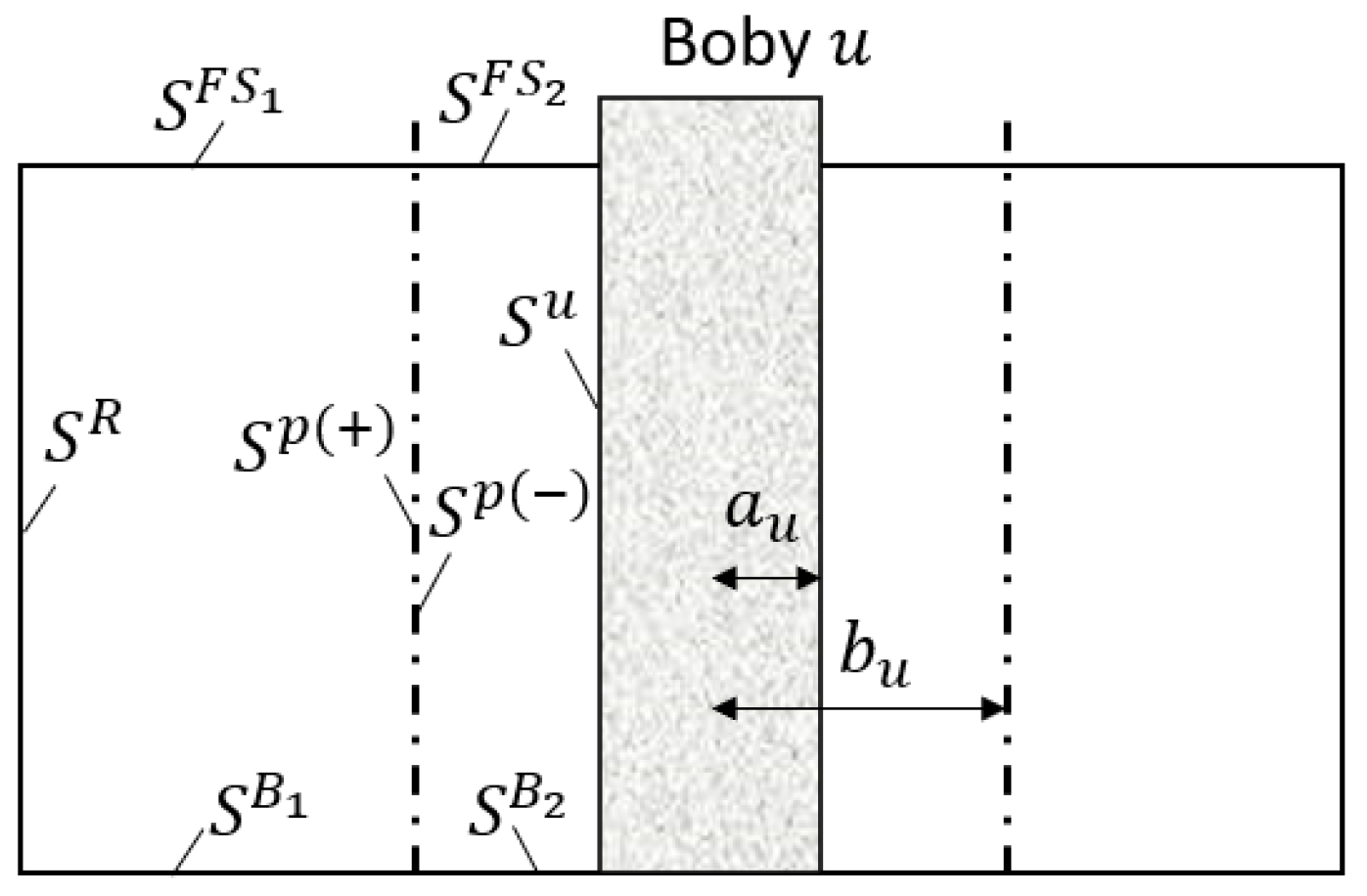
2. Hydrodynamic Formulation
3. Evaluation of the Mean Drift Wave Forces
3.1. Direct Pressure Integration Method
3.2. Momentum Method
4. Numerical Results
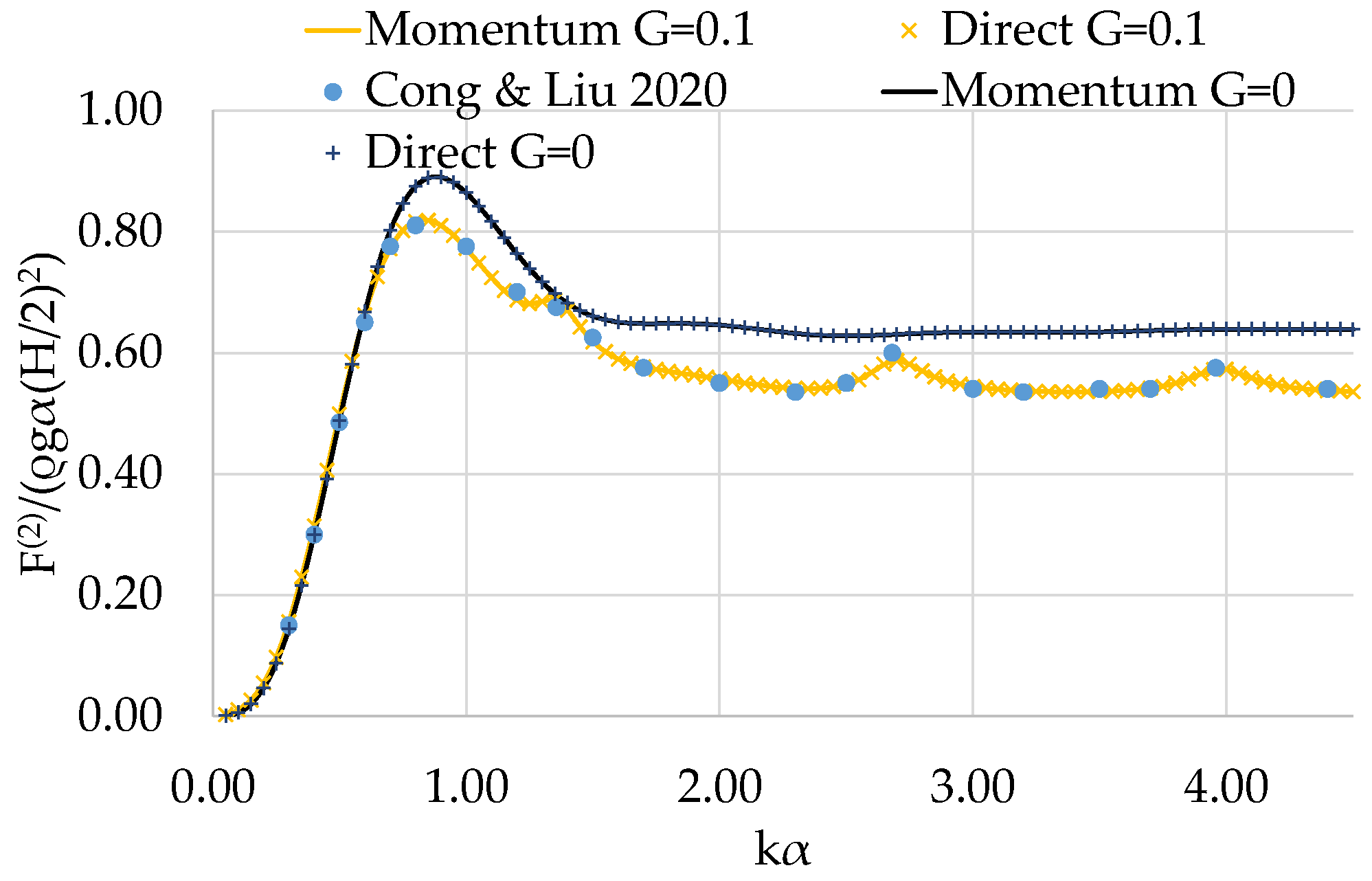
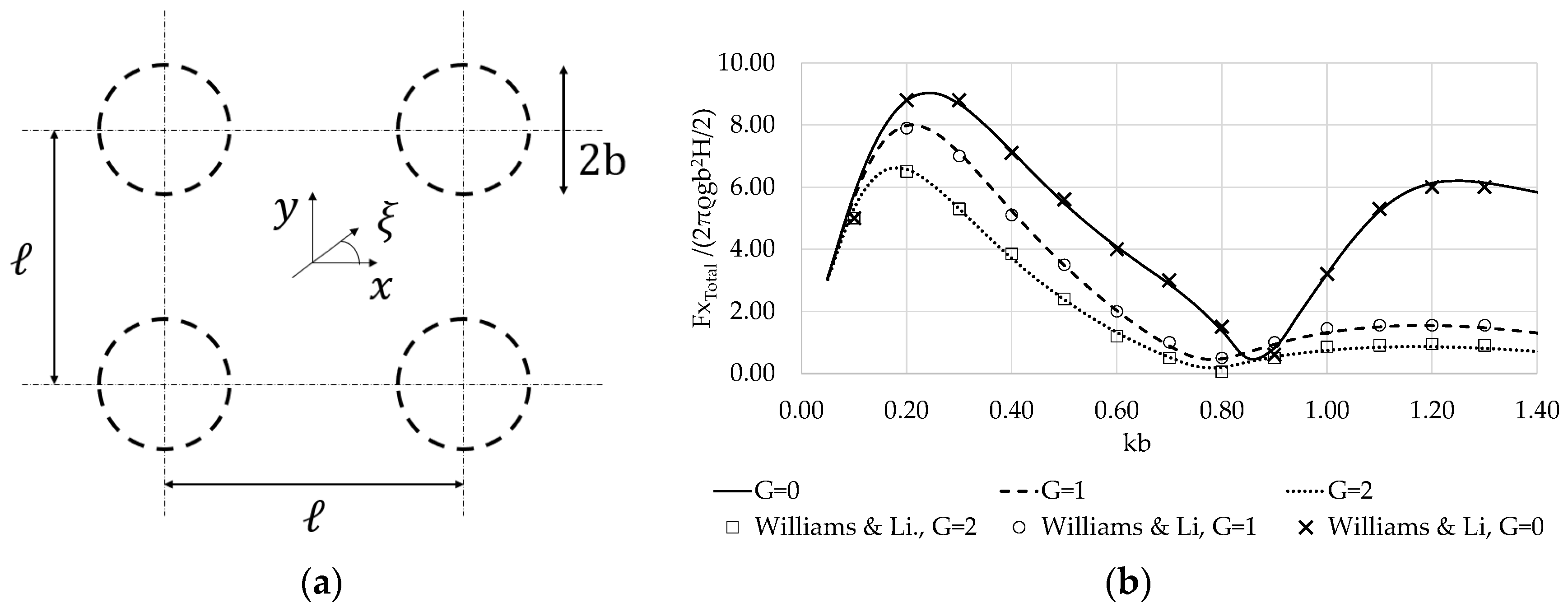
4.1. Result Validation
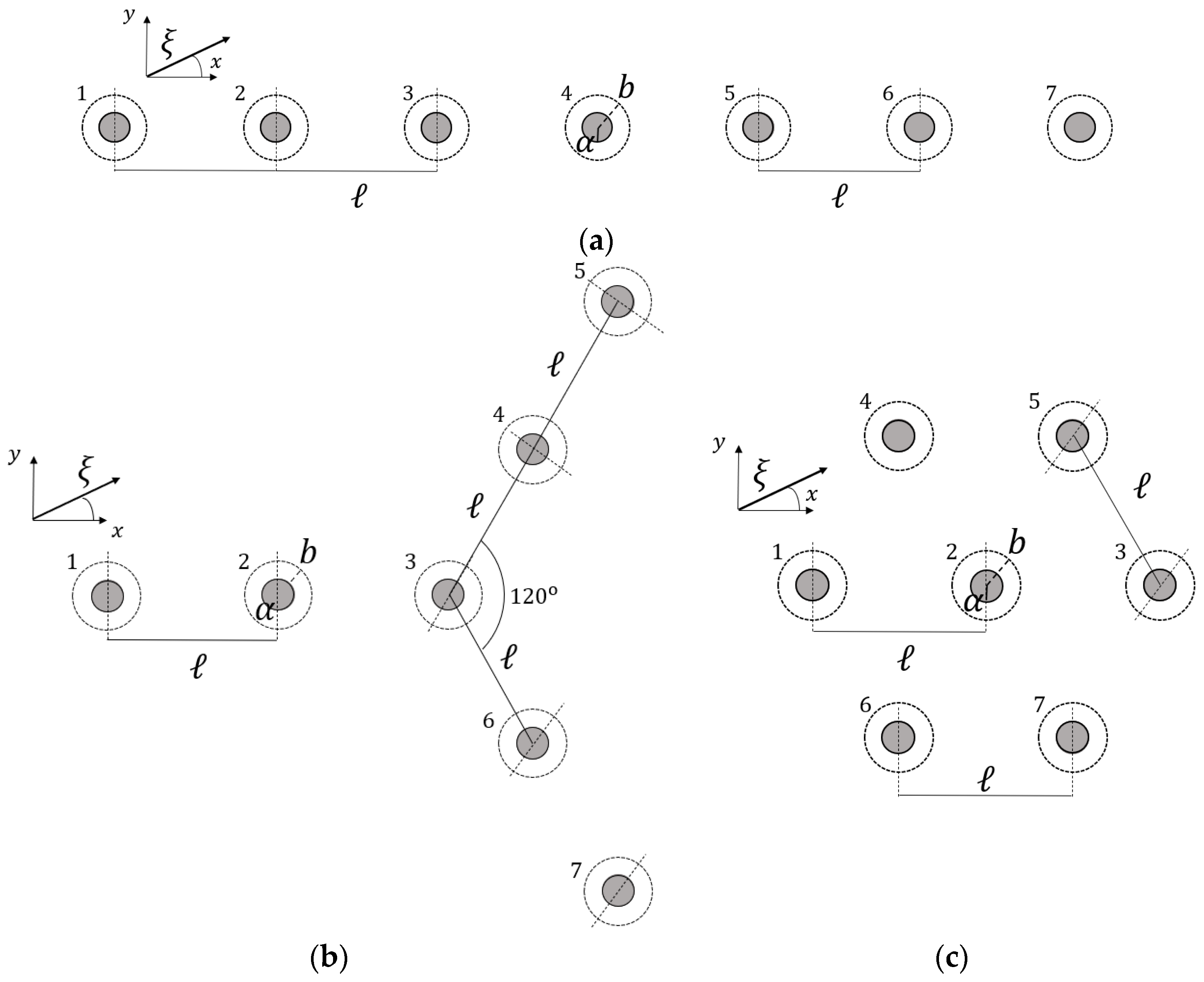
4.2. Test Cases
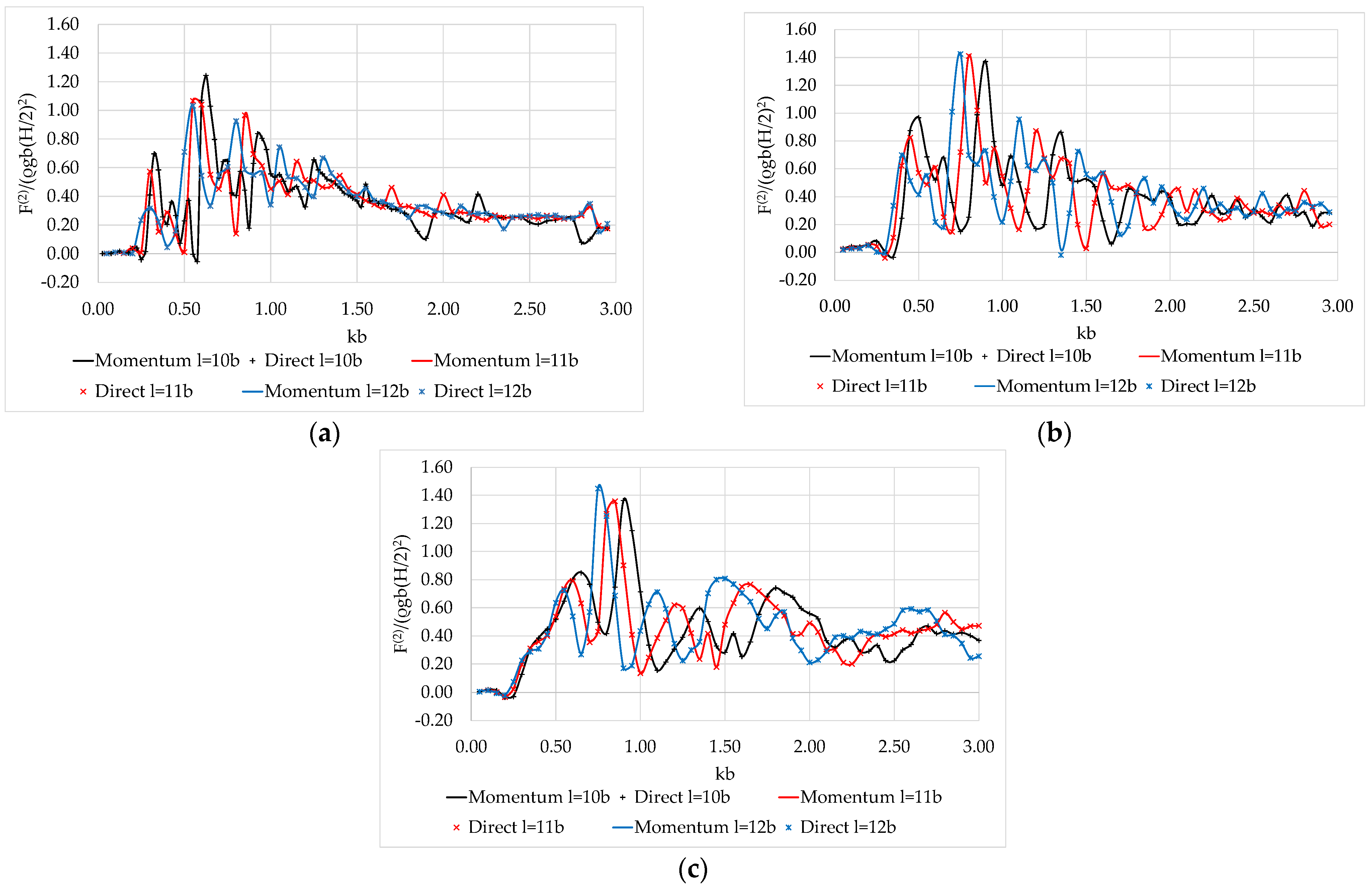
4.2.1. Effect of the Distance between the Bodies
4.2.2. Effect of the Porous Coefficient
4.2.3. Effect of the Wave Heading Angle
4.2.4. Effect of the Porous Side Surface on the Central Solid Body
5. Conclusions
- The variation pattern of the mean drift wave forces on a body when it is considered part of an array attains an oscillatory behavior that is dependent on the type of body arrangement. Nevertheless, this behavior is not valid for isolated solids. This can be traced back to continuous wave interactions with the bodies of the array, which cause strong disturbances on the mean drift wave forces;
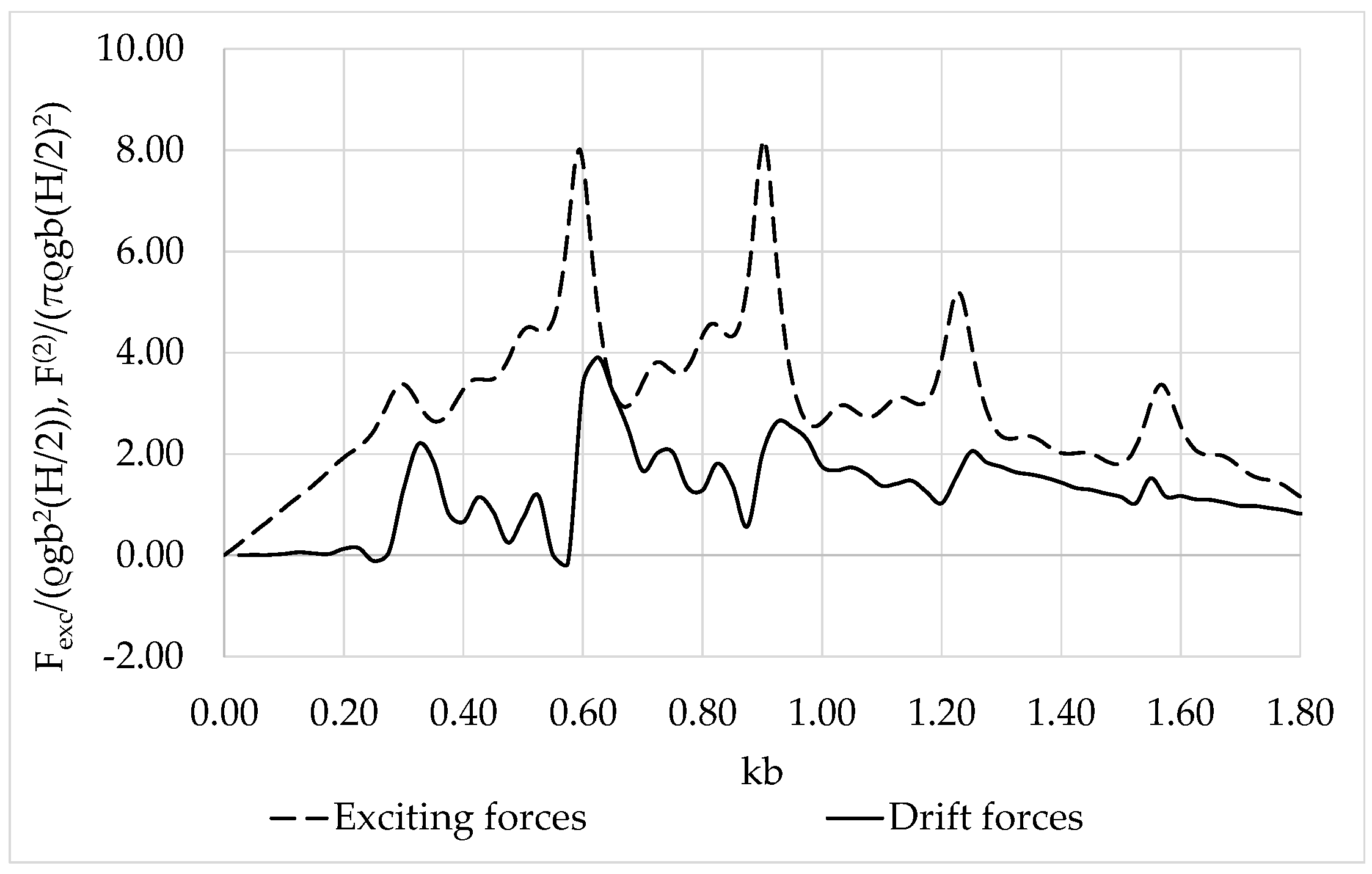
- Trapped and nearly trapped waves are also noted in the mean drift forces on a finite array of porous bodies with lower values when compared to their exciting counterparts;
- The porosity coefficient G influences the mean drift wave forces. The oscillatory trend of the forces that appears is enhanced reverse-proportionally with G. Furthermore, the porosity of the side surface can effectively reduce the acting forces on the central impermeable body. This energy dissipation caused by pores can become preferable for applications such as the protection of a semi-submerged floating structure in severe wave conditions;
- Finally, the semi-analytical model proposed in this study for the evaluation of the mean drift wave forces has demonstrated that both computational methodologies attain high-accuracy results.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Appendix A
Appendix B

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Configuration A1 | Configuration A2 | Configuration A3 | ||||
|---|---|---|---|---|---|---|
| Momentum | Direct | Momentum | Direct | Momentum | Direct | |
| 0.3000 | 0.41458 | 0.40937 | 0.00067 | 0.00033 | 0.13020 | 0.12469 |
| 0.3500 | 0.58951 | 0.58488 | −0.03784 | −0.03457 | 0.30948 | 0.30457 |
| 0.6000 | 1.07580 | 1.07090 | 0.52373 | 0.51868 | 0.80431 | 0.79942 |
| 0.6500 | 1.02990 | 1.02820 | 0.68133 | 0.67722 | 0.85257 | 0.84807 |
| 0.7000 | 0.53172 | 0.52782 | 0.35413 | 0.35977 | 0.77201 | 0.76696 |
| 0.9000 | 0.63288 | 0.62943 | 1.37200 | 1.37010 | 1.36400 | 1.36220 |
| 1.0000 | 0.55855 | 0.55704 | 0.48237 | 0.48098 | 0.71450 | 0.71347 |
| 1.0500 | 0.55293 | 0.55152 | 0.69343 | 0.69188 | 0.33544 | 0.33374 |
| 1.1500 | 0.46890 | 0.46763 | 0.29084 | 0.28909 | 0.21517 | 0.21285 |
| 1.3000 | 0.55671 | 0.55643 | 0.70065 | 0.70038 | 0.52146 | 0.52087 |
| 1.3500 | 0.50852 | 0.50815 | 0.8629 | 0.86249 | 0.59692 | 0.59624 |
| 1.4000 | 0.45879 | 0.45829 | 0.53241 | 0.53189 | 0.50219 | 0.50146 |
| 1.6000 | 0.37314 | 0.37248 | 0.22745 | 0.22676 | 0.25414 | 0.25327 |
| 1.8000 | 0.26170 | 0.26146 | 0.42581 | 0.42546 | 0.74094 | 0.74061 |
| 2.0000 | 0.28323 | 0.28303 | 0.39497 | 0.39473 | 0.55834 | 0.55804 |
| 2.2000 | 0.41584 | 0.41573 | 0.30100 | 0.30091 | 0.36445 | 0.36429 |
| 2.4000 | 0.25634 | 0.25630 | 0.37928 | 0.37922 | 0.33172 | 0.33165 |
| 2.6000 | 0.22895 | 0.22896 | 0.21619 | 0.21624 | 0.33896 | 0.33904 |
| 2.8000 | 0.07998 | 0.08000 | 0.28880 | 0.28878 | 0.43552 | 0.43559 |
| 2.9000 | 0.17829 | 0.17831 | 0.27739 | 0.27742 | 0.42242 | 0.42255 |
| Configuration A1 | Configuration A2 | Configuration A3 | ||||
|---|---|---|---|---|---|---|
| Momentum | Direct | Momentum | Direct | Momentum | Direct | |
| 0.3000 | 0.02543 | 0.02543 | 0.18246 | 0.18013 | 0.06510 | 0.06234 |
| 0.3500 | −0.02926 | −0.03083 | 0.26217 | 0.26106 | 0.15476 | 0.15230 |
| 0.6000 | 0.26813 | 0.26532 | 0.52058 | 0.51959 | 0.40212 | 0.39968 |
| 0.6500 | 0.22988 | 0.22694 | 0.74681 | 0.74525 | 0.42629 | 0.42404 |
| 0.7000 | 0.30156 | 0.29892 | 0.29352 | 0.29144 | 0.38609 | 0.38557 |
| 0.9000 | 0.53753 | 0.53622 | 0.53007 | 0.52938 | 0.68185 | 0.68096 |
| 1.0000 | 0.47967 | 0.47826 | 0.52401 | 0.52378 | 0.35726 | 0.35675 |
| 1.0500 | 0.29183 | 0.29045 | 0.31208 | 0.31177 | 0.16775 | 0.16690 |
| 1.1500 | 0.10643 | 0.10551 | 0.19587 | 0.19497 | 0.10760 | 0.10644 |
| 1.3000 | 0.22763 | 0.22722 | 0.20019 | 0.19983 | 0.26069 | 0.26039 |
| 1.3500 | 0.22076 | 0.22028 | 0.25455 | 0.25416 | 0.29843 | 0.29809 |
| 1.4000 | 0.32255 | 0.32202 | 0.28780 | 0.28732 | 0.25106 | 0.25070 |
| 1.6000 | 0.14206 | 0.14168 | 0.33381 | 0.33333 | 0.12717 | 0.12774 |
| 1.8000 | 0.36802 | 0.36772 | 0.30232 | 0.30208 | 0.37045 | 0.37028 |
| 2.0000 | 0.27350 | 0.27334 | 0.36217 | 0.36198 | 0.27920 | 0.27905 |
| 2.2000 | 0.36376 | 0.36368 | 0.23402 | 0.23393 | 0.18220 | 0.18212 |
| 2.4000 | 0.23905 | 0.23903 | 0.15788 | 0.15781 | 0.16582 | 0.16579 |
| 2.6000 | 0.19934 | 0.19928 | 0.32219 | 0.32225 | 0.16944 | 0.16949 |
| 2.8000 | 0.25606 | 0.25606 | 0.29740 | 0.29748 | 0.21777 | 0.21781 |
| 2.9000 | 0.25634 | 0.25639 | 0.29041 | 0.29045 | 0.21115 | 0.21122 |
References
- Maniar, H.D.; Newman, N.J. Wave diffraction by a long array of cylinders. J. Fluid Mech. 1997, 339, 309–330. [Google Scholar] [CrossRef]
- Evans, D.; Porter, R. Near-trapping of waves by circular arrays of vertical cylinders. Appl. Ocean Res. 1997, 19, 83–99. [Google Scholar] [CrossRef]
- Sollitt, C.K.; Cross, R.H. Wave transmission through permeable breakwaters. In Proceedings of the 13th International Conference on Coastal Engineering, Vancouver, BC, Canada, 10–14 July 1972; pp. 1827–1846. [Google Scholar]
- Guo, Y.; Mohapatra, S.; Soares, C.G. Experimental study on the performance of an array of vertical flexible porous membrane type breakwater under regular waves. Ocean Eng. 2022, 264, 112328. [Google Scholar] [CrossRef]
- Rojanakamthorn, S.; Isobe, M.; Watanabe, A. A Mathematical Model of Wave Transformation over a Submerged Breakwater. Coast. Eng. Jpn. 1989, 32, 209–234. [Google Scholar] [CrossRef]
- Losada, I.; Silva, R.; Losada, M. Interaction of non-breaking directional random waves with submerged breakwaters. Coast. Eng. 1996, 28, 249–266. [Google Scholar] [CrossRef]
- Suh, K.D.; Park, W.S. Wave reflection from perforated-wall caisson breakwaters. Coast. Eng. 1995, 26, 177–193. [Google Scholar] [CrossRef]
- Zhu, S.; Chwang, A.T. Analytical Study of Porous Wave Absorber. J. Eng. Mech. 2001, 127, 326–332. [Google Scholar] [CrossRef]
- Liu, Y.; Li, H. Analysis of wave performance through pile-rock breakwaters. Proc. Inst. Mech. Eng. Part M J. Eng. Marit. Environ. 2014, 228, 284–292. [Google Scholar] [CrossRef]
- Liu, Y.; Li, H.-J. Wave reflection and transmission by porous breakwaters: A new analytical solution. Coast. Eng. 2013, 78, 46–52. [Google Scholar] [CrossRef]
- Koley, S.; Sahoo, T. Wave interaction with a submerged semicircular porous breakwater placed on a porous seabed. Eng. Anal. Bound. Elem. 2017, 80, 18–37. [Google Scholar] [CrossRef]
- Chyon, M.S.A.; Rahman, A.; Rahman, M.A. Comparative study on hydrodynamic performance of porous and non-porous submerged breakwater. Procedia Eng. 2017, 194, 203–210. [Google Scholar] [CrossRef]
- Kaligatla, R.B.; Tabssum, S.; Sahoo, T. Surface gravity wave interaction with a partial porous breakwater in a two-layer ocean having bottom undulations. Waves Random Complex Media 2021, 1–32. [Google Scholar] [CrossRef]
- Chwang, F.A.T.; Wu, J. Wave Scattering by Submerged Porous Disk. J. Eng. Mech. 1994, 120, 2575–2587. [Google Scholar] [CrossRef]
- Liu, Y.; Li, H.-J.; Li, Y.-C.; He, S.-Y. A new approximate analytic solution for water wave scattering by a submerged horizontal porous disk. Appl. Ocean Res. 2011, 33, 286–296. [Google Scholar] [CrossRef]
- Evans, D.V.; Peter, M.A. Asymptotic reflection of linear water waves by submerged horizontal porous plates. J. Eng. Math. 2011, 69, 135–154. [Google Scholar] [CrossRef]
- Meylan, M.H.; Greaves, D.; Iglesias, G. Water-wave interaction with submerged porous elastic disks. Phys. Fluids 2020, 32, 047106. [Google Scholar] [CrossRef]
- Guo, Y.; Mohapatra, S.; Soares, C.G. Wave energy dissipation of a submerged horizontal flexible porous membrane under oblique wave interaction. Appl. Ocean Res. 2020, 94, 101948. [Google Scholar] [CrossRef]
- Guo, Y.; Mohapatra, S.; Soares, C.G. Composite breakwater of a submerged horizontal flexible porous membrane with a lower rubble mound. Appl. Ocean Res. 2020, 104, 102371. [Google Scholar] [CrossRef]
- Mohapatra, S.C.; Guedes Soares, C. Hydroelastic behavior of a submerged horizontal flexible porous structure in three-dimensions. J. Fluids Struct. 2021, 104, 103319. [Google Scholar] [CrossRef]
- Mohapatra, S.; Soares, C.G. Surface gravity wave interaction with a horizontal flexible floating plate and submerged flexible porous plate. Ocean Eng. 2021, 237, 109621. [Google Scholar] [CrossRef]
- de Freitas, I.M.; Farina, L.; Miller, J.J. The heaving motion of a porous disc submerged in deep water. Ocean Eng. 2021, 219, 108290. [Google Scholar] [CrossRef]
- Zhao, F.; Zhang, T.; Wan, R.; Huang, L.; Wang, X.; Bao, W. Hydrodynamic loads acting on a circular porous plate horizontally submerged in waves. Ocean Eng. 2017, 136, 168–177. [Google Scholar] [CrossRef]
- Wang, K.-H.; Ren, X. Wave interaction with a concentric porous cylinder system. Ocean Eng. 1994, 21, 343–360. [Google Scholar] [CrossRef]
- Cong, P.; Liu, Y. Local Enhancements of the Mean Drift Wave Force on a Vertical Column Shielded by an Exterior Thin Porous Shell. J. Mar. Sci. Eng. 2020, 8, 349. [Google Scholar] [CrossRef]
- Vijayalakshmi, K.; Sundaravadivelu, R.; Murali, K.; Neelamani, S. Hydrodynamics of a Concentric Twin Perforated Circular Cylinder System. J. Waterw. Port Coast. Ocean Eng. 2008, 134, 166–177. [Google Scholar] [CrossRef]
- Teng, B.; Zhao, M.; Li, Y.C. Wave diffraction from a cylinder with porous upper wall and an inner column. ACTA Oceanol. Sin. 2001, 23, 6. [Google Scholar]
- Ning, D.-Z.; Zhao, X.-L.; Teng, B.; Johanning, L. Wave diffraction from a truncated cylinder with an upper porous sidewall and an inner column. Ocean Eng. 2017, 130, 471–481. [Google Scholar] [CrossRef]
- Mackay, E.; Liang, H.; Johanning, L. A BEM model for wave forces on structures with thin porous elements. J. Fluids Struct. 2021, 102, 103246. [Google Scholar] [CrossRef]
- Dokken, J.; Grue, J.; Karstensen, L.P. Wave analysis of porous geometry with linear resistance law. J. Mar. Sci. Appl. 2017, 16, 480–489. [Google Scholar] [CrossRef]
- Dokken, J.; Grue, J.; Karstensen, P. Wave forces on porous geometries with linear and quadratic pressure-velocity relations. In Proceedings of the 32nd International Workshop on Water Waves and Floating Bodies, Dalian, China, 23–26 April 2017. [Google Scholar]
- Bao, W.; Kinoshita, T.; Zhao, F. Wave forces on a semi-submerged porous circular cylinder. Proc. Inst. Mech. Eng. Part M J. Eng. Marit. Environ. 2009, 223, 349–360. [Google Scholar] [CrossRef]
- Zhao, F.; Bao, W.; Kinoshita, T.; Itakura, H. Theoretical and Experimental Study on a Porous Cylinder Floating in Waves. J. Offshore Mech. Arct. Eng. 2011, 133, 011301. [Google Scholar] [CrossRef]
- Sankar, A.; Bora, S.N. Hydrodynamic forces due to water wave interaction with a bottom-mounted surface-piercing compound porous cylinder. Ocean Eng. 2019, 171, 59–70. [Google Scholar] [CrossRef]
- Sankar, A.; Bora, S.N. Hydrodynamic forces and moments due to interaction of linear water waves with truncated partial-porous cylinders in finite depth. J. Fluids Struct. 2020, 94, 102898. [Google Scholar] [CrossRef]
- Sankar, A.; Bora, S.N. Hydrodynamic coefficients for a floating semi-porous compound cylinder in finite ocean depth. Mar. Syst. Ocean Technol. 2020, 15, 270–285. [Google Scholar] [CrossRef]
- Park, M.-S.; Koo, W. Mathematical Modeling of Partial-Porous Circular Cylinders with Water Waves. Math. Probl. Eng. 2015, 2015, 903748. [Google Scholar] [CrossRef]
- Park, M.S.; Koo, W.; Choi, Y. Hydrodynamic interaction with an array of porous circular cylinders. Int. J. Nav. Archit. Ocean Eng. 2010, 2, 146–154. [Google Scholar] [CrossRef]
- Zhao, F.-F.; Kinoshita, T.; Bao, W.-G.; Huang, L.-Y.; Liang, Z.-L.; Wan, R. Interaction between waves and an array of floating porous circular cylinders. China Ocean Eng. 2012, 26, 397–412. [Google Scholar] [CrossRef]
- Sankarbabu, K.; Sannasiraj, S.; Sundar, V. Interaction of regular waves with a group of dual porous circular cylinders. Appl. Ocean Res. 2007, 29, 180–190. [Google Scholar] [CrossRef]
- Mavrakos, S. The vertical drift force and pitch moment on axisymmetric bodies in regular waves. Appl. Ocean Res. 1988, 10, 207–218. [Google Scholar] [CrossRef]
- Konispoliatis, D.; Mavrakos, S. Mean Drift Forces on Vertical Cylindrical Bodies Placed in Front of a Breakwater. Fluids 2020, 5, 148. [Google Scholar] [CrossRef]
- Sclavounos, P.D. The vertical wave drift force on floating bodies. In Proceedings of the 2nd International Workshop on Water Waves and Floating Bodies, Bristol, UK, 16–19 March 1987. [Google Scholar]
- Molin, B. On second-order motion and vertical drift forces for three-dimensional bodies in regular waves. In Proceedings of the International Workshop on Ship and Platform Motion, Berkeley, CA, USA, 26–28 October 1983. [Google Scholar]
- Papanikolaou, A.; Zaraphonitis, G. On the improved method for the evaluation of second-order motions and loads on 3D floating bodies in waves. J. Schiffstechnik 1987, 34, 170–211. [Google Scholar]
- Shao, Y.L. Numerical analysis of second-order mean wave forces by a stabilized higher order boundary element method. In Proceedings of the 37th International Conference on Ocean, Offshore and Arctic Engineering, Madrid, Spain, 17–22 July 2018. [Google Scholar]
- Kokkinowrachos, K.; Mavrakos, S.; Asorakos, S. Behavior of vertical bodies of revolution in waves. Ocean Eng. 1986, 13, 505–538. [Google Scholar] [CrossRef]
- Williams, A.; Li, W. Water wave interaction with an array of bottom-mounted surface-piercing porous cylinders. Ocean Eng. 2000, 27, 841–866. [Google Scholar] [CrossRef]
- Mavrakos, S.; Koumoutsakos, P. Hydrodynamic interaction among vertical axisymmetric bodies restrained in waves. Appl. Ocean Res. 1987, 9, 128–140. [Google Scholar] [CrossRef]
- Twersky, V. Multiple Scattering of Radiation by an Arbitrary Configuration of Parallel Cylinders. J. Acoust. Soc. Am. 1952, 24, 42–46. [Google Scholar] [CrossRef]
- Watson, G.N. A Treatise on the Theory of Bessel Functions, 2nd ed.; Cambridge University Press: Cambridge, UK, 1966. [Google Scholar]
- Pinkster, J.A.; Oortmerssen, G.V. Computation of the first and second order wave forces on oscillating bodies in regular waves. In Proceedings of the 2nd International Conference on Numerical Ship Hydrodynamics, Berkeley, CA, USA, 19–21 September 1977. [Google Scholar]
- Offshore Wind Platform. Available online: https://www.offshorewind.biz/2012/02/17/hexicon-to-install-offshore-wind-platform-malta/ (accessed on 24 April 2023).
- AquaDomi Floating Hotels. Available online: https://www.cfmoller.com/p/AquaDomi-floating-hotels-i2339.html (accessed on 24 April 2023).
- Mavrakos, S.; McIver, P. Comparison of methods for computing hydrodynamic characteristics of arrays of wave power devices. Appl. Ocean Res. 1997, 19, 283–291. [Google Scholar] [CrossRef]
- Mavrakos, A.; Konispoliatis, D.; Ntouras, D.; Papadakis, G.; Mavrakos, S. Hydrodynamic coefficients in heave of a moonpool-type floater using theoretical, numerical and CFD methodologies. Ocean Eng. 2023, 279, 114519. [Google Scholar] [CrossRef]
- Chatjigeorgiou, I.K.; Chatziioannou, K.; Mazarakos, T. Near Trapped Modes in Long Array of Truncated Circular Cylinders. J. Waterw. Port Coast. Ocean Eng. 2019, 145, 04018035. [Google Scholar] [CrossRef]











Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Konispoliatis, D.N.; Mavrakos, S.A. Mean Drift Wave Forces on Arrays of Bodies Surrounded by Thin Porous Surfaces. J. Mar. Sci. Eng. 2023, 11, 1269. https://doi.org/10.3390/jmse11071269
Konispoliatis DN, Mavrakos SA. Mean Drift Wave Forces on Arrays of Bodies Surrounded by Thin Porous Surfaces. Journal of Marine Science and Engineering. 2023; 11(7):1269. https://doi.org/10.3390/jmse11071269
Chicago/Turabian StyleKonispoliatis, Dimitrios N., and Spyridon A. Mavrakos. 2023. "Mean Drift Wave Forces on Arrays of Bodies Surrounded by Thin Porous Surfaces" Journal of Marine Science and Engineering 11, no. 7: 1269. https://doi.org/10.3390/jmse11071269
APA StyleKonispoliatis, D. N., & Mavrakos, S. A. (2023). Mean Drift Wave Forces on Arrays of Bodies Surrounded by Thin Porous Surfaces. Journal of Marine Science and Engineering, 11(7), 1269. https://doi.org/10.3390/jmse11071269