Abstract
This paper presents the proposal for the concept design of hybrid Offshore Patrol Vessels (OPV) that are suitable for countries with budget constraints. Many countries cannot afford two different classes of ships to answer the current civil and military challenges. Therefore, the proposed approach might be the most acceptable solution for these countries. The concept design covers hybrid OPVs that could include traditional navy capabilities such as anti-ship and anti-air warfare in addition to offshore patrol tasks. This enables a hybrid concept design model that incorporates major tasks of both patrol and corvette classes of ships. The solutions are achieved by applying a multi-attribute concept design procedure that was developed earlier for a generic naval vessel design. The procedure is customized to suit this purpose by applying appropriate design variables, parameter space constraints, updated ship propulsion systems, weapons, other equipment, and design requirements i.e., required areas, volumes, and electricity. The results are the Pareto optimal set of solutions that are used as initial designs in the subsequent phases of the design of the hybrid OPV. The earlier developed software named “MonakoPRB” is updated to suit the above-mentioned changes in the design procedure to generate hybrid OPV concept design solutions.
1. Introduction
The main intention of the paper is to contribute to the concept design procedure of a naval vessel that will combine offshore patrol tasks with traditional naval capabilities such as anti-ship (ASW) and anti-air warfare (AAW). The contribution of this study is related to the analysis of current OPVs capabilities and their possible use as hybrid vehicles which is achieved by using a proposed concept design procedure. The opinion of the authors is that this approach might be attractive for countries that cannot afford two different classes of naval ships, e.g., OPV and Corvette. It is expected that the best alternative to developing a true class of naval ship that will cover one specific capability such as patrol ship, corvette, frigate, etc., is to merge two capabilities of OPV and corvette in one new hybrid class and get a ship that might respond to a wider set of operational requirements. The main advantage of this approach is to reduce the price of acquisition of some naval capabilities while deviating from the optimal solution for a pure naval vessel. This paper presents an approach to obtaining hybrid OPV designs by applying a multi-attribute concept design procedure using a genetic algorithm. The introductory part gives a short description of the methodology used and the literature review. The Section 2 describes the main tasks and characteristics of the existing OPVs and the available project designs. The Section 3 presents concept design requirements and an overview of multi-attribute optimization with an emphasis on the optimization procedure, while the naval architecture part is mainly omitted because it was in detail presented in [1]. The Section 4 gives the design variables used in the procedure and constraints of the parameter space. Design solutions are generated on basis of 20 design variables that represent ship hull form, options of material for hull and superstructure, options of ship propulsion, weapon systems, autonomy and range of the ship, ship equipment, and other capabilities. The Section 5 is related to design attributes e.g., ship total life cycle cost (TLCC) and overall measure of ship effectiveness (OMOE). TLCC is based on currently available prices of materials and equipment, labor costs, and the life cycle costs such as maintenance and upgrading, fuel and other fluids, crew, etc. OMOE is based on specific attributes that are related to the tactical-technical characteristics of the ship, while the weight coefficients result from the interviews with the naval officers in charge. The Section 6 shows the results of the study in terms of the Pareto optimal set of solutions for hybrid OPV as a standard OPV and another set as a combat ship e.g., a corvette. One preferred comparable solution from each set is selected from both Pareto fronts as a possible initial solution for further detailed design. The discussion gives an overview of the paper and an assessment of its applicability. The Section 7 provides information about research gaps and future work in this area.
References dealing with naval ship concept design and specifically to OPV and corvette design are presented in the following text. Reference [1] presents a multi-attribute concept design procedure of a generic naval vessel. The procedure generates a set of Pareto optimal design solutions for up to corvette-size size vessels. It is composed of a self-balanced concept design model and the search for the Pareto optimal design solutions. The concept design model generates a set of balanced designs, while the Pareto optimal search executes the multi-attribute evaluations of design solutions and identifies the Pareto optimal set. Considerations of the applications to naval ship design are given in [2,3,4,5,6,7]. Where in [2] a method of a conceptual design of main defense systems through a case study of a hypothetical naval ship is presented. Optimization of the naval ship design variables, considering vulnerability reduction measures during the early stage distributed ship system design process to ensure the availability of the required systems in a damaged state, is proposed in [3]. The main aim of the paper [4] was to offer a quantitative supportability evaluation approach applicable to naval ship concept design. The nature of naval ship design errors, failures, and lessons learned from naval history in this area is considered in [5]. In [6] the processes that use the concept of a ship distribution system combined with a design space exploration in the early stage of naval ship design are shown. In [7] the example of the concept design of an Offshore Patrol Vessel for the Canadian Coast Guard is shown. This project was undertaken by a group of five students from the University of British Columbia as a part of the NAME 591—Computer-Aided ship design project. The design was produced with the collaboration of industry mentors and faculty advisors concerning the concept design stage. The project was completed by performing the design spiral procedure and multiple changes were made for important project aspects. The reference is used to check and compare some specific design parameters such as weight coefficients of the hull and superstructure, vertical center of gravity, and some ship form coefficients.
In [8] the budget analysis for the procurement of a class of arctic/offshore patrol ships for the Canadian Coast Guard is presented. The report was developed for the need of the Canadian parliament to determine the rationale of the government’s plan to deliver six to eight ships for 2.8 billion CAD by 2024. A total-ship system design and requirements definition methodology that includes important components necessary for a systematic naval ship concept design approach is proposed in [9]. The methodology is described in the context of an OPV project conducted by senior undergraduate design students at Virginia Tech. In [10] a methodology for designing and evaluating different propulsion configurations of naval surface combatants is developed. The research deals with parametric equations that represent different propulsion system parameters appropriate for concept naval ship design. The development of a technique for predicting the propulsion coefficients from hull-form parameters is described in [11]. The reference is used for comparing and evaluating propulsion coefficients obtained in the design procedure and those presented in our work. Different propulsion options for naval combatants based on traditional and additional criteria such as greater range of speed, change in operational requirements, added mission flexibility, lower emissions, etc., are presented in [12].
The naval ship concept design method that considers the relationship between cost, effectiveness, and risk is given in [13]. In paper [14], it is shown a new approach in naval ship design that is based on ship system integration, life cycle concerns, and cost-effectiveness as opposed to traditional spiral design. A methodology to explore naval ship systems vulnerability in the naval ship concept design process is introduced in [15]. Some approaches aimed at the identification of the Pareto front of a multi-objective optimization problem are shown in [16]. Here, the three different techniques are presented: local sampling, Pareto front resampling, and Normal Boundary Intersection (NBI). The use of the excessive acceleration criterion, within the second-generation intact stability criteria framework, is presented for a set of naval vessels in [17]. In the work [18] a procedure for conducting multi-attribute decision-making ship structural design of a multi-purpose ship is developed. A procedure for the optimal design of ship diesel–electric propulsion systems, minimizing fuel consumption while satisfying the power and speed requirements are presented in the paper [19]. The selection guide of marine propulsion transmission systems used to create propulsion options for the concept design proposals of OPV is included in [20]. In [21] the presentation that compares the conventional two-engine propulsion arrangement with the four-engine OPV Power-pack concept as defined by MTU-Renk is given. Even though this is not an in-depth study, it has sought to identify the main ship impact and performance aspects of interest to the designer and operator. Also, the comparison of the classical mechanical propulsion system and hybrid propulsion, which also uses an electric motor is given in [22]. The main conclusion is that a hybrid e.g., a combination of diesel mechanic or electric (CODOE) propulsion system is the most suitable for the OPV application due to its applicability for a wide range of required speeds. Marine diesel engine catalogs [23,24,25] were used for choosing the options of propulsion engines for the concept design of OPV.
Typical examples of OPV and comparable naval classes of ships that are used to summarize the main characteristics of this class of naval ships are presented in [26,27,28,29,30,31,32,33,34,35,36]. Those data are used in support of the selection of the main design variables regarding the materials, propulsion, armament, and other major equipment options.
2. Main Tasks and Characteristics of Existing OPVs and Designs
The main tasks of OPV are:
- Surveillance of EEZ, migrant routes and fishing,
- Interception of suspicious vessels with fast RHIB boats,
- Prevention of smuggling of people, drugs, and weapons,
- Search and rescue,
- Actions against environmental pollution,
- Disaster relief to the island or coastal population,
- Logistic support,
- Protection of critical infrastructure at sea,
- ASW,
- AAW.
The main characteristics of existing OPVs and proposed designs are analyzed. Geometrical and some tactical characteristics of OPVs are shown in Appendix A Table A1 which is used in support of the selection of design variables such as materials of hull and superstructure, propulsion, armament, other major equipment options, and tactical characteristics e.g., range and autonomy. It appears that the length overall is from 65 up to 110 m, the breadth from 10 to 15 m, the draught from 3.25 to 4.55 m, the B/T ratio from 2.88 to 4.33, the displacement from 1000 to 2500 tons, the volumetric coefficient from 2.7 to 4.3. OPV class ranges from 3500 to 6000 nautical miles, autonomy from 21 to 40 days, and maximum continuous speed from 18 to 25 knots. Hull material is mostly mild or high-tensile steel, while the superstructure is high-tensile steel or marine-grade aluminum. Propulsion systems are CODOE, CODAD, or simple two propulsion lines with diesel engines. Bow gun varies from 57 to 76 mm caliber with additional smaller caliber guns or heavy machine guns of 12.7 mm. Combat-oriented OPVs are additionally equipped with anti-ship missiles and rarely with anti-air missiles. The majority of vessels have mission containers for ecological protection, diving operations, research, one or two RHIBs, and heavy, medium, or small helicopters. It is important to stress that OPV has challenging requirements for longer ranges, more autonomy to stay for a longer period at sea, and at the same time acceptable seakeeping characteristics in higher sea states e.g., sea states 5 and 6. Based on the presented analyses and specific requirements that might be considered by maritime countries with an MoD-limited budget, the design requirements are developed and shown in the next Section.
3. Concept Design Requirements and Multi-Attribute Optimization Approach
Based on analyses in Section 2, and specific needs regarding maritime countries with MoD-limited budgets, the hybrid OPV concept design requirements are developed, and shown in Table 1.

Table 1.
Concept design requirements.
The multi-attribute design procedure applies a genetic algorithm in search of the Pareto frontier. The generation of design solutions is based on the set of 20 design variables, while the two design attributes are the OMOE and TLCC [37]. It is found sufficient to produce 250 to 300 generations of solutions to achieve the convergence of subsequent Pareto sets of solutions. Validation of the model was extensively tested in [1], where each software module was tested independently and after integration in the model. The convergence was achieved and the stability of the results is verified through their repeatability. Finally, the preferred solution was also validated against the existing naval ship, as demonstrated in [1].
By applying this design procedure, a designer can rapidly come to a range of conceptual solutions that correspond to the set of user requirements. There are many optimization methods that may alternatively be applied to this specific problem of optimization of naval vessels [38,39]. The usage of methods such as CFD (Computational Fluid Dynamics), and FEM (Finite Element Method) require the definition of the ship hull form since they are first-principal calculation methods. At the level of concept design, the 3D ship hull form definition is not yet available since it belongs to the higher level of ship design. Since our previous experience is based on a genetic algorithm, and it gave acceptable results within a reasonable execution time, we decided to keep “Non-Dominated Sorting Genetic Algorithm-II” (NSGA-II) as the optimization method [40,41,42]. This method filters generated design solutions to separate feasible ones and ranks them resulting in a set of non-dominated design solutions. Design generation is done by randomly selecting the values of project variables. Ship’s form design variables are real variables that are set within the defined constraints. The constraints of the design variables of the ship’s form are sufficiently wide for this type of ship, and allow the creation of different ship forms to arrive at a series of project solutions i.e., population. Other input variables are discrete, and their value depends on the choice of selected hull and superstructure material, autonomy, range, weapons, and equipment related to the survival property of the ship.
After generating the designs, the procedure tries to balance them in terms of mass, and areas/volumes. Projects that cannot be balanced by mass or area/volume are discarded, and the goal is obtaining an initial P population of VELPOP-balanced projects. After the initial population of balanced projects P is created, the calculation of attributes and constraints of all population projects is performed. The projects are then ranked in the Pareto fronts where the 0th front represents non-dominant solutions, followed by projects from fronts 1, 2, etc. The distance between the projects of individual Pareto fronts is calculated in the attribute space. Distances are used during the selection process, to prefer those solutions in the area where there are fewer solutions, to achieve a good distribution and density of solutions throughout the Pareto front.
For the first selection of the child population Q, the tournament selection applies. From the initial population, two individuals are randomly selected, one of which is selected to obtain a set of individuals from which will be created a Q child population by applying genetic operators. When both individuals are feasible, the one with a smaller Pareto rank is selected. When both individuals are of the same rank, the one with a greater distance is selected.
When one individual is feasible and the other is not, the feasible one is selected. When both individuals are infeasible, the one with a smaller deviation from the constraint is chosen. After selection, an average of 80% of the selected projects are crossed, while 10% are mutated, and in this way, the creation of a child Q population is completed.
For the Q population, the calculation of the self-balance of the designs and all related ship parameters is performed again since a small part of the Q population, after the application of genetic operators, is no longer balanced. Such projects are artificially assigned maximum values of constraints that rank them at the back of all projects, and they disappear during the subsequent execution of the algorithm.
The next step in the design procedure is to combine the P and Q populations and obtain a twice as large new PuQ population. This step is necessary to achieve the property of elitism i.e., to retain the best solutions. The PuQ population is ranked using the Pareto principle in constrained conditions, and a new parent population P is formed from it.
Projects of the new P population are checked in a self-balancing model, Pareto ranking is performed, and distances for all Pareto fronts are calculated. By applying tournament selection, crossbreeding and mutation, a new child Q population is obtained. Populations P and Q are combined into a new PuQ population, and this process continues iteratively until a given number of generations is reached.
4. Design Variables and Constraints of the Parameter Space
The design variables in the model are shown in Table 2. The first set of design variables is related to the ship form, while others refer to the material of the hull and superstructure, ship propulsion system, cruising range, autonomy, weapon options, and signature options of a naval ship. Design variables are based on the user’s tactical and technical requirements and a total of 20 variables are sufficient to define the concept designs of hybrid OPV. The following design model constraints are applied to design solutions in the design space, and in detail presented in [1]:
Table 2.
Design variables.
- The maximum continuous speed must be at least 20 knots,
- The total required electric power must be less than the installed power of two diesel generators,
- The minimum depth of the hull depends on the ship’s longitudinal strength (LWL/14), and the height of the main propulsion engine,
- The stability of the ship in damaged condition requires that the edge of the main deck must be above the water at the angle of heel 25°,
- The constraints of initial stability represent a ratio of metacentric height and the breadth of the ship that should be in a range e.g., between 0.05 and 0.30,
- Vertical acceleration at the bridge should not exceed 0.25 g,
- Available design length should be equal to or greater than the required length,
- Available design area/volume should be equal to or greater than required.
5. Hybrid OPV Concept Design Attributes
There are two design model attributes i.e., OMOE and the TLCC. The OMOE is the weighted sum formulated from the values of the 13 specific attributes that impact the tactical-technical characteristics of the ship, such as speed, cruising range, weapons, autonomy, and survivability. Specific attributes are divided into four groups: weapon, mobility, survival, and operability. This attribute is obtained by applying the weight coefficients KTK(i) derived by inter-attribute preference using Saaty’s theory [43], and the analytic hierarchy process (AHP). The weight coefficients are based on the interviews with the naval officers in charge (former commanders of patrol vessels of the Croatian navy). The same approach is applied for value functions VFP(i). Figure 1 represents the hierarchical structure of specific attributes, while Table 3 represents the weights of specific attributes.
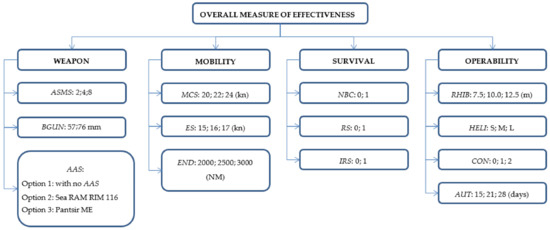
Figure 1.
Analytic hierarchy structure of specific attributes.
Table 3.
Weight coefficients of OMOE-specific attributes KTK(i).
The attribute TLCC consists of the design cost (DC), ship construction cost (SCC), the cost of the crew (CC), fuel and lubricants (FC), maintenance (MC), and the cost of major upgrading during the life cycle (MUC):
TLCC = DC + SCC + CC + FC + MC + MUC,
The ship construction cost is based on the current prices of materials and equipment and it is determined using the weight groups as used by the US Navy i.e., “Expanded Ship Work Breakdown Structure”. The cost of labor is also based on the weight groups taking into account the labor price of similar ships. The cost of major equipment is determined by taking into account available offers and related information in the Croatian Ministry of Defense. The cost of the crew is assessed based on the ship’s 30-year lifecycle, the complement, and its composition. The cost of the fuel and lubricants is based on the ship’s 30-year lifecycle and the assumption that on average a ship will be operational 2000 h per year. The cost of maintenance and major upgrading is assessed as a percentage of the construction cost of the ship taking into account the practice of the Croatian Navy.
6. Results
Upon formulation of hybrid OPV concept design requirements i.e., design variables, constraints, weights of hull and superstructure, required areas and volumes, specific weights coefficients of OMOE, and associated costs of all materials and equipment the “MonakoPRB” software is adequately updated, and tested. The final results, a set of Pareto optimal solutions, are obtained as output. The test runs show that about 250 concept design solutions are sufficient to get a well-populated Pareto set. Each solution is represented by a set of respective parameters. All ship’s form parameters are within common thresholds for OPV, e.g., a block coefficient of about 0.5, a longitudinal prismatic coefficient close to 0.65, as well as the main ship’s form dimension ratios. All solutions are feasible and satisfy a set of required constraints. Figure 2 shows a graph of the Pareto optimal set of hybrid OPV solutions presented as a blue squares. Two or three preferred solutions are selected as initial points for the development of the next level of the design. Since two interviewed officers-experts for this area have different priorities of the OPV’s main tasks, it results in two different sets of specific weight coefficients for the elements of OMOE. Therefore, the design procedure is repeated twice. Figure 3 represents the Pareto set of solutions (blue squares) obtained by using weight coefficients that give priority to the hybrid OPV as a combat ship (e.g., Corvette). The completely different Pareto front, as compared to the one shown in Figure 3, is obtained when a set of weight coefficients gives priority to the standard OPV, as shown in Figure 2.
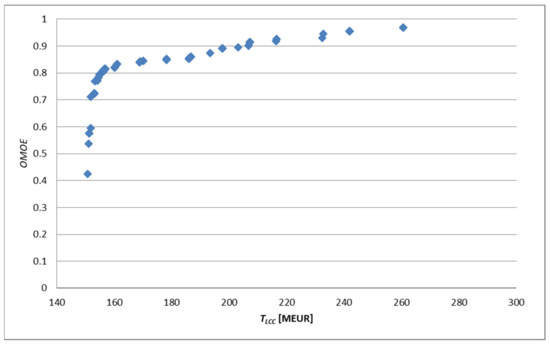
Figure 2.
Pareto optimal set of solutions (blue squares) for hybrid OPV as a standard OPV.
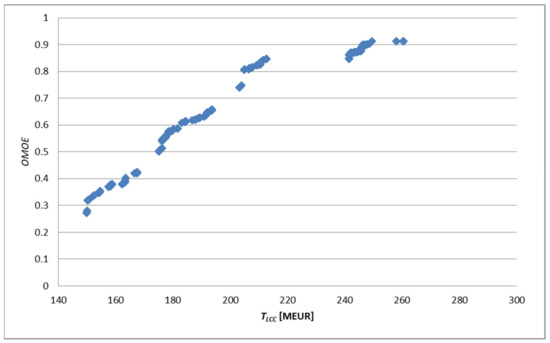
Figure 3.
Pareto optimal set of solutions (blue squares) for hybrid OPV as a combat ship.
One preferred solution having comparable TLCC is selected from each Pareto front, as shown in Table 4.
Table 4.
Design parameters of selected preferred design solutions.
Comparing the two preferred solutions it is established that they have similar hull forms. Both ships have the same propulsion arrangement. The combat ship has a slightly higher maximum continuous speed, while the standard OPV has more autonomy. Also, the combat ship has less lightship weight due to the smaller principal dimensions. The armament and the equipment of both ships are almost identical with the difference in mission container options.
7. Discussion
In this paper, the concept design of a hybrid OPV using a multi-attribute design procedure is presented. Hybrid OPV is a naval vessel that fulfills the needs of the coastal nations for both military (corvette) and civilian operations (OPV). The design procedure used earlier developed software „MonakoPRB“ is updated taking into account specifics of a hybrid OPV such as design variables, constraints of project space, weights of hull and superstructure, required areas, and volumes. Two attributes are used in the design procedure: OMOE which is represented through specific weights coefficients for individual tactical requirements, and TLCC of design. Because responsible officers and experts for the usage of such vessels have opposite approaches, the first one perceives a vessel with civilian tasks as a priority, while the second one favors military tasks. The results for both approaches are a set of Pareto optimal non-dominated designs. After this complex procedure, the next step is to select two or more preferred candidates that will be considered concept designs for further design development. Finally, based on the criteria of the lowest cost and comparable OMOE in a certain set of prominent solutions, one of them will be chosen and designed in detail. Following the proposed concept design procedure of hybrid OPV, the opinion of the authors is that savings in the MOD budget may be achieved. The increase in calculation cost and time in using the proposed design method is not significant. Executing Pareto sets of approx. 250 generations take about 10 min on an average notebook.
8. Conclusions
At the level of the concept design, we apply parametric relations. To increase the reliability of the method the parametric relations should be revised regularly before applying the method to practical design purposes. This should be done whenever new statistical data become available. This statistical data applies to ship geometry, stability, seakeeping, resistance and propulsion, new equipment, new machinery, and new armament. The OMOE attribute is obtained by applying the weight coefficients and value functions derived from inter-attribute preference using Saaty’s theory, and the analytic hierarchy process (AHP). In the present study, two naval officers were interviewed. The weight coefficients that would be based on the interviews with more naval officers in command would contribute significantly to our confidence in practical results. Even though the authors’ are quite satisfied with the optimization method NSGA II, in future work other optimization methods may be tested and compared.
Author Contributions
Conceptualization, methodology, software, validation, and original draft preparation, A.L.; Resources, formal analysis, visualization, supervision, V.S. and I.G.; Project administration, investigatsion, review, and editing, L.M. All authors have read and agreed to the published version of the manuscript.
Funding
This research received no external funding.
Conflicts of Interest
The authors declare no conflict of interest.
Abbreviations
| AAS | anti-air system, |
| AAW | anti-air warfare, |
| AHP | Analytic Hierarchical Process, |
| AP | aft perpendicular, |
| ASW | anti-ship warfare, |
| ASMS | anti-ship missile system, |
| AUT | the autonomy of the ship, [days] |
| B | breadth of the ship on the main section and WL, [m] |
| BGUN | bow gun, |
| CAD | Canadian Dollars, |
| C4I | command, control, communications, computers, and intelligence, |
| CBT | B to T ratio coefficient, [-] |
| CDL | volumetric coefficient, [-] |
| CLH | L to H ratio coefficient, [-] |
| CRD | distance from AP to the rear forecastle bulkhead to LWL ratio coeff., [-] |
| CRT | transom to main section immersed area ratio coefficient, [-] |
| CON | container, |
| CB | block coefficient, [-] |
| CC | cost of the crew, [MEUR] |
| CFD | Computational Fluid Dynamics, |
| CP | longitudinal prismatic coefficient, |
| CPP | controllable pitch propeller, |
| CM | main section coefficient, [-] |
| CGMB | GM to B ratio coefficient, [-] |
| CWP | waterplane coefficient, [-] |
| CODAD | combined diesel and diesel, |
| CODOE | combined diesel or electric, |
| D | displacement, [t] |
| DC | design cost, [MEUR] |
| DP | propeller diameter, [m] |
| EEZ | Exclusive Economic Zone, |
| END | endurance, [NM] |
| EOS | Electro-Optical System, |
| ES | economy speed, [kn] |
| FC | fuel and lubricants cost, [MEUR] |
| FEM | Finite Element Method, |
| GM | metacentric height, [m] |
| H | ship height, [m] |
| HELI | helicopter, |
| HT10 | depth of hull at LPP/2, [m] |
| IRS | infra-red signature |
| weight coefficients in expression for global effectiveness, [-] | |
| LOA | length overall, [m] |
| LWL | length of water line, [m] |
| L/B | length overall and breadth ratio, [-] |
| LPP | length between perpendiculars, [m] |
| MC | maintenance cost, [MEUR] |
| MCS | maximum continuous speed, [kn] |
| MUC | major upgrading during the life cycle cost, [MEUR] |
| MoD | Ministry of Defense, |
| NBC | nuclear, biological, chemical, |
| NSGA | Non-Dominated Sorting Genetic Algorithm, |
| OMAT | materials of hull and superstructure options, |
| OPSNS | options of ship propulsion, |
| OPENS | cruising range options, |
| OANS | autonomy options, |
| OBGNS | bow gun options, |
| OASMS | anti-ship missile system options, |
| ORHIB | RHIB options, |
| OAAS | anti-air system options, |
| ORS | radar signature options, |
| OIRS | infra-red signature options, |
| ONBC | NBC options, |
| OVNK | mission container options, |
| OHELI | helicopter options, |
| OMOE | overall measure of effectiveness, [-] |
| OPV | offshore patrol vessel, |
| P | initial population, |
| PPAT | cruising speed power, [kW] |
| PMCR | maximum continuous rating power, [kW] |
| PuQ | combined initial and child populations, |
| RHIB | rigid hull inflatable boat, |
| ROV | Remotely Operated Vehicle, |
| RS | radar signature, |
| Q | child population, |
| SCC | ship construction cost, [MEUR] |
| T | ship draft, [m] |
| TLCC | total life cycle cost, [MEUR] |
| UE | maximum continuous speed, [kn] |
| UMAX | maximum speed, [kn] |
| VELPOP | size of population, |
| VFP(i) | value functions, [-] |
| WLS | light ship mass, [t] |
| WMO | World Metrological Organization, |
| WT | total mass, [t] |
Appendix A
Table A1.
Overview of existing OPVs and proposed designs.
Table A1.
Overview of existing OPVs and proposed designs.
| Ship Designation | LOA | B | L/B | T | H | CL/H | CB/T | D | CDL | UMAX | UE | END | AUT | |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| m | m | m | m | - | - | t | - | kn | kn | NM | days | |||
| 1. | Avante 3000 | 93.9 | 14.2 | 6.61 | 4.36 | - | - | 3.26 | 2695 | 3.26 | 21 | 3500 | - | |
| 2. | Avante 2200 Patrol | 98.9 | 13.6 | 7.27 | 4.05 | - | - | 3.36 | 2455 | 2.54 | 25 | - | 3500 | - |
| 3. | Avante 1400 | 79.9 | 11.5 | 6.95 | 4.0 | - | - | 2.88 | 1500 | 2.94 | 22 | - | 4000 | - |
| 4. | Avante 300 | 55.65 | 9.0 | 6.18 | 2.17 | - | - | 4.15 | 490 | 2.84 | 34 | - | 1100 | - |
| 5. | Samuel Beckett Class | 90.0 | 14.0 | 6.43 | 3.8 | - | - | 3.68 | 2256 | 3.09 | 23 | 15 | 6000 | 21 |
| 6. | River Class PV Batch1 | 79.5 | 13.5 | 5.88 | 3.8 | - | - | 3.55 | 1700 | 3.38 | 20 | - | 5500 | 21 |
| 7. | River Class PV Batch2 | 90.5 | 13.5 | 6.7 | 3.8 | - | - | 3.55 | 2000 | 2.70 | 25 | - | 5500 | 35 |
| 8. | OPV-8301 | 84 | 15.4 | 5.45 | - | - | - | - | - | 22 | - | 8000 | 35 | |
| 9. | HMS Forth (P222) | 90.5 | 13.0 | 6.96 | 3.8 | - | - | 3.42 | 2000 | 2.70 | 24 | - | 5500 | 35 |
| 10. | HNLMS Holland | 108.4 | 16.0 | 6.78 | 4.55 | - | - | 3.52 | 3750 | 2.94 | 21.5 | - | 5000 | 21 |
| 11. | 80M OPV BAE Sys. | 81.5 | 13.5 | 6.04 | - | - | - | 1700 | 3.14 | 20 | - | 5500 | 21 | |
| 12. | 90M OPV BAE Sys. | 90 | 13.5 | 6.66 | - | - | - | 1800 | 2.47 | 25 | - | 5500 | 35 | |
| 13. | Damen OPV 2400 | 90 | 14.4 | 6.25 | 4.0 | 7.0 | 12.9 | 3.6 | 2400 | 3.29 | 23 | - | 6000 | 40 |
| 14. | Damen OPV 2400 | 83 | 13.7 | 6.06 | 3.75 | 6.8 | 12.2 | 3.65 | 1890 | 3.31 | 22 | - | 5000 | 30 |
| 15.* | Damen OPV 2400 | 61.94 | 9.7 | 6.39 | 3.25 | 4.7 | 13.18 | 2.98 | 1022 | 4.3 | 18 | - | - | - |
| 16. | Damen OPV 1400 | 72 | 12.7 | 5.67 | 3.75 | 6.20 | 11.61 | 3.39 | 1470 | 3.94 | 21 | - | 4000 | 25 |
| 17.** | Damen OPV 950 | 66 | 10.25 | 6.44 | 2.90 | 4.70 | 15.32 | 3.53 | 925 | 3.22 | 20.6 | - | - | - |
| 18. | OPV 90 Lurssen | 90 | 14.0 | 6.43 | 3.5 | - | - | 4.0 | 2100 | 2.88 | - | - | - | - |
| 19. | OPV 85 Lurssen | 85 | 13.5 | 6.3 | 3.5 | - | - | 3.86 | 1900 | 3.09 | - | - | - | - |
| 20. | OPV 80 Lurssen | 80 | 13.0 | 6.15 | 3.0 | - | - | 4.33 | 1486 | 2.9 | - | - | - | - |
* CB = 0.57, ** CB = 0.49.
References
- Ljulj, A.; Slapničar, V.; Grubišić, I. Multi-attribute concept design procedure of a generic naval vessel. AEJ 2020, 59, 1725–1734. [Google Scholar] [CrossRef]
- Schaffner, M.A.; Ross, A.M.; Rhodes, D.H. A Method for Selecting Affordable System Concepts: A Case Application to Naval Ship Design. In Proceedings of the Conference on System Engineering Research (CSER 2104), Massachusetts Institute of Technology, Redondo Beach, CA, USA, 21–22 March 2014. [Google Scholar]
- van Diessen, M.F.; Duchateau, E.A.E.; Kana, A.A.; Hopman, J.J. Integrating vulnerability analysis into the early stage distributed naval ship system design process. J. Mar. Eng. Technol. 2022, 21, 343–354. [Google Scholar] [CrossRef]
- Esbati, S. Design for Support in the Initial Design of Naval Combatants. Ph.D. Thesis, Department of Mechanical Engineering, University College London, London, UK, 2018. [Google Scholar]
- Andrews, D. Design Errors in Ship Design. J. Mar. Sci. Eng. 2021, 9, 34. [Google Scholar] [CrossRef]
- Rigterink, D.T.; Ames, R.; Gray, A.; Doerry, N. Early-Stage Assessment of the Impacts of Next Generation Combat Power and Energy Systems on Navy Ships. In Proceedings of the ASNE Advanced Machinery Technology Symposium, AMTS 2016, Villanova University Connelly Center, Villanova, PA, USA, 25–26 May 2016. [Google Scholar]
- Liao, Z.S.; Jagarlapudi, Y.; Faramarzifar, A.; Kaushal, K.; Yang, Y. Concept Design of an Offshore Patrol Vessel for the Canadian Coast Guard, NAME 591—Computer-Aided Ship Design Project; Naval Architecture and Marine Engineering Department of Mechanical Engineering University of British Columbia: Vancouver, BC, Canada, 2015. [Google Scholar]
- Barkel, E.K.; Story, R. Budget Analysis for the Acquisition of a Class of Arctic/Offshore Patrol Ships; Office of the Parliamentary Budget Officer: Ottawa, ON, Canada, 2014; pp. 1–42. [Google Scholar]
- Brown, A.; Kerns, C. Multi-Objective Optimization in Naval Ship Concept Design. Available online: https://www.phoenix-int.com/wp-content/uploads/2017/05/Multi-Objective_Optimization_in_Naval_Ship_Concept_Design.pdf (accessed on 21 October 2022).
- van Es, G.F. Designing and Evaluating Propulsion Concepts of Surface Combatants. Master’s Thesis, Delft University of Technology, Delft, The Netherlands, 16 September 2011. [Google Scholar]
- Hurwitz, R.B. Prediction of Thrust-Deduction and Wake Fractions for Twin-Screw Destroyers; David. W. Taylor Naval Ship Research and Development Center: Bethesda, MD, USA, 1980; pp. 1–121. [Google Scholar]
- Ohmayer, H.F. Propulsion System Choices for Modern Naval Vessels, Washington. 2012. Available online: https://studylib.net/doc/18070219/propulsion-system-choices-for-modern-naval-vessels (accessed on 21 October 2022).
- Brown, A.J.; Sajdak, J. Still Reenginering the Naval Ship Concept Design Process. Naval Eng. J. 2015, 127, 49–61. [Google Scholar]
- Park, J.; Kim, T.; Kang, H.; Jeon, S.; Jeong, W.; Cho, M.; Choi, D.; Lee, K. Recent Early-Phase Naval Ship Systems Engineering for Republic of Korea Navy. Naval Eng. J. 2016, 128, 103–115. [Google Scholar]
- Goodfriend, D.; Brown, A.J. Exploration of System Vulnerability in naval Ship Concept Design. J. Ship Prod. Design 2018, 34, 42–58. [Google Scholar] [CrossRef]
- Peri, D. Direct Tracking of the Pareto Front of a Multi-Objective Optimization Problem. J. Mar. Sci. Eng. 2020, 8, 699. [Google Scholar] [CrossRef]
- Boccadamo, G.; Rosano, G. Excessive Acceleration Criterion: Appllication to Naval Ships. J. Mar. Sci. Eng. 2019, 7, 431. [Google Scholar] [CrossRef]
- Pereira, T.; Garbatov, Y. Multi-Attribute Decision-Making Ship Structural Design. J. Mar. Sci. Eng. 2022, 10, 1046. [Google Scholar] [CrossRef]
- Zaccone, R.; Campoea, U.; Martelli, M. Optimisation of a Diesel-Electric Ship Propulsion and Power Generation system Using a Genetic Algorithm. J. Mar. Sci. Eng. 2021, 9, 587. [Google Scholar] [CrossRef]
- ZF Group. ZF Product Selection Guide, Marine Propulsion Systems; ZF Group: Friedrichshafen, Germany, 2022; pp. 1–168. [Google Scholar]
- Buckingham, J. BMT presentation on multi-engine propulsion solutions for Offshore Patrol Vessel (OPV). In Proceedings of the Renk Symposium, Augsburg, Germany, 7–8 June 2011. [Google Scholar] [CrossRef]
- Koenhardono, E.S.A. Comparative of Feasibility Study Between Diesel Mechanical Propulsion System and Combination of Diesel Engine and Electric Motor Propulsion System on Offshore Patrol Vessel (OPV) 80 m. In Proceedings of the 5th International Seminar on Ocean and Coastal Engineering, Environmental and Natural Disaster Management (ISOCEEN 2017), Surabaya, Indonesia, 8 November 2017. [Google Scholar]
- Caterpillar. Marine Power Solutions; Caterpillar: Irving, TX, USA, 2018; pp. 1–212. [Google Scholar]
- Rolls-Royce. MTU Solution Guide, Marine & Offshore; Rolls-Royce: Friedrichshafen, Germany, 2019; pp. 1–53. [Google Scholar]
- Wartsila. Wartsila Product Guide; Wartsila: Vaasa, Finland, 2021; pp. 1–200. [Google Scholar]
- Avante-300.pdf. Available online: https://www.navantia.es/wp-content/uploads/2018/05/Avante-300.pdf (accessed on 21 October 2022).
- Avante-1400.pdf. Available online: https://www.navantia.es/wp-content/uploads/2018/06/Avante-1400.pdf (accessed on 21 October 2022).
- Avante-2200-P_.pdf. Available online: https://www.navantia.es/wp-content/uploads/2018/05/Avante-2200-P_.pdf (accessed on 21 October 2022).
- Avante-3000-plata.pdf. Available online: https://www.navantia.es/wp-content/uploads/2018/06/Avante-3000-plata.pdf (accessed on 21 October 2022).
- Samuel Beckett-Class Offshore Patrol Vessel. Available online: https://military-history.fandom.com/wiki/Samuel_Beckett-class_offshore_patrol_vessel (accessed on 21 October 2022).
- River Class Offshore Patrol Vessel. Available online: https://www.seaforces.org/marint/Royal-Navy/Patrol-Vessel/River-class.htm (accessed on 21 October 2022).
- BRP Gabriela Silang (OPV-8301). Available online: https://en.wikipedia.org/wiki/BRP_Gabriela_Silang_(OPV-8301) (accessed on 21 October 2022).
- Holland-Class Offshore Patrol Vessel. Available online: https://en.wikipedia.org/wiki/Holland-class_offshore_patrol_vessel (accessed on 21 October 2022).
- Offshore Patrol Vessels. Available online: https://www.baesystems.com/en/product/offshore-patrol-vessels (accessed on 21 October 2022).
- Damen. Available online: https://products.damen.com/ (accessed on 21 October 2022).
- Offshore Patrol Vessels. Available online: https://nvl.de/en/naval-vessels/opv// (accessed on 21 October 2022).
- Demko, D. Tools for Multi-Objective and Multi-Disciplinary Optimization in Naval Ship Design. Master’s Thesis, Faculty of Virginia Polytechnic Institute and State University, Blacksburg, VA, USA, 2005. [Google Scholar]
- Wang, C.-N.; Yang, F.-C.; Nguyen, V.T.T.; Nguyen, Q.M.; Huynh, N.T.; Huynh, T.T. Optimal Design for Compliant Mechanism Flexure Hinges: Bridge-Type. Micromachines 2021, 12, 1304. [Google Scholar] [CrossRef] [PubMed]
- Nguyen, T.V.T.; Huynh, N.-T.; Vu, N.-C.; Kieu, V.N.D.; Huang, S.-C. Optimizing compliant gripper mechanism design by employing an effective bi-algorithm: Fuzzy logic and ANFIS. Microsyst. Technol. 2021, 27, 3389–3412. [Google Scholar] [CrossRef]
- Deb, K.; Agrawal, S.; Pratap, A.; Meyarivan, T. A Fast Elitist Non-Dominated Sorting Genetic Algorithm for Multi-Objective Optimization: NSGA-II. In Proceedings of the Parallel Problem Solving from Nature PPSN.VI, Paris, France, 18–20 September 2000. [Google Scholar]
- Deb, K.; Pratap, A.; Agarwal, S.; Meyarivan, T. A fast and Elitist Multiobjective Genetic Algorithm: NSGA-II. IEEE Trans. Evol. Comput. 2002, 6, 182–197. [Google Scholar] [CrossRef]
- Seshadri, A. Fast Elitist Multiobjective Genetic Algorithm, NSGA-II. Available online: https://web.njit.edu/~horacio/Math451H/download/Seshadri_NSGA-II.pdf (accessed on 21 October 2022).
- Saaty, L.T. Decision Making with the Analytic Hierarchy Process. Int. J. Serv. Sci. 2008, 1, 83–98. [Google Scholar] [CrossRef]
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).