
EE-UWSNs: A Joint Energy-Efficient MAC and Routing Protocol for Underwater Sensor Networks



Abstract
:1. Introduction
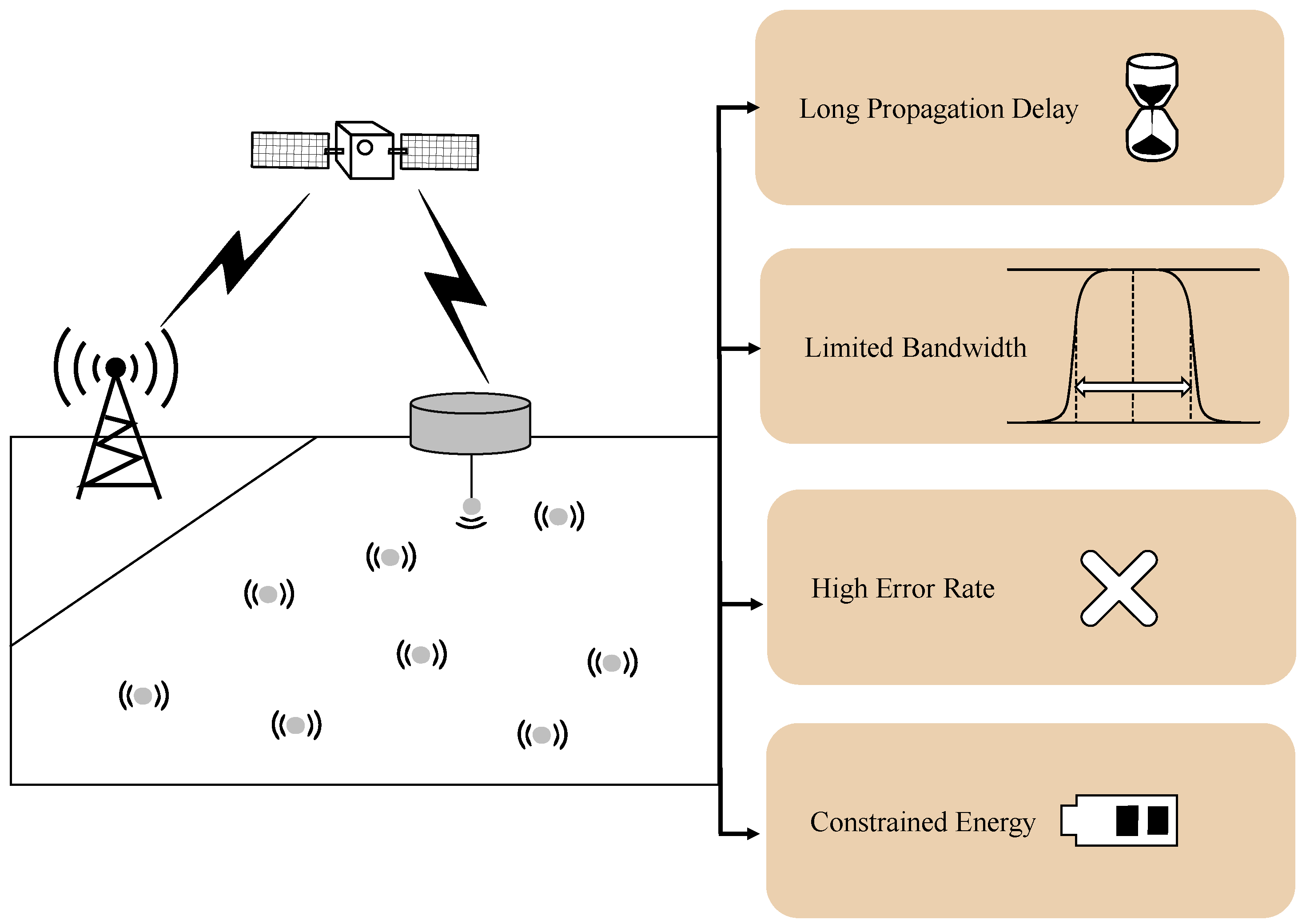
- Long Propagation Delay: In the water medium, the velocity of sound waves is around 1500 m/s. It is much slower than radio waves, which travel at the velocity of light ( m/s). Furthermore, several features of the water environment, like depth, temperature, and salinity, have an impact on the speed at which the sound signal spreads. The slow propagation of acoustic waves leads to quite a long propagation latency, even over a limited range [11].
- Limited Bandwidth: In comparison with radio networks, the actual bandwidth of the underwater acoustic medium is very low. It is extremely restricted because most acoustic systems work at under 30 kHz. In addition, the available bandwidth of sound media depends on both transmitting range and frequency. Because the bandwidth of the channel is limited, the data transmission rate will be low, usually lower than 10 kbps [12,13].
- High Error Rate: The sound link quality is impacted by many things, such as noise, signal attenuation, and multiple paths. The sound channel suffers from several sources of noise (both man-made and ambient). Man-made noise may result from shipping actions and machinery tasks. On the other hand, ambient noise originates from hydrodynamics (e.g., wave movement and storms on the water surface) or biological sources (e.g., seismic risk, the swimming behavior of fishes). If there is no noise, there is still transmission loss caused by the attenuation of the signal. This signal attenuation is a result of the absorption of sound energy and grows with distance and frequency. Multipath propagation mostly originates from reflections from the water surface and the water bottom. In addition, it may be caused by various refracted rays. All these factors give rise to high rates of error in data transmission [14,15].
- Constrained Energy: One of the major challenges when deploying underwater sensor networks is the limitation of energy resources of the sensor nodes. The reason is that they are powered by batteries. The sensor nodes expend their power when they receive, transmit, process, and overhear information. In underwater environments, it is difficult to replace or recharge the batteries of the sensors [16,17]. Moreover, other power sources, such as solar energy, are not available in the ocean depths. The unbalanced consumption of power will cause an early shortage of energy. This will affect the whole network and will impair the network’s integrity. As a result, balanced power consumption for each sensor node becomes essential in underwater circumstances and can prolong the lifetime of the network. The consumption of power in a way that results in the exhaustion of all sensors at the same time is desirable so that the sensors’ batteries can be replaced together [18].
2. Related Works
2.1. Energy-Aware MAC Protocols for UWSNs
2.2. Energy-Aware Routing Protocols for UWSNs
2.3. The Limitations of the Existing MAC/Routing Protocols
- The existing protocols focus on either MAC or routing layer. The design of an energy-efficient protocol for UWSNs should consider both MAC and routing protocols, as they complement each other.
- Most of the recent proposed energy-aware protocols are based on only one principle to save sensor energy, which is usually putting some sensors in sleep mode. However, there are several principles that can be applied to save energy, such as providing several levels of energy according to the distances between the source sensor and the next one and narrowing the field of a sensor operation to a specific region.
- Most of the works do not consider distributing the traffic loads between sensors in UWSNs. Therefore, there is the problem of draining the energy of some sensors more than others, creating the issue of early sensor death.
3. The Proposed EE-UWSNs Protocol
3.1. The Main Principles of Energy Saving
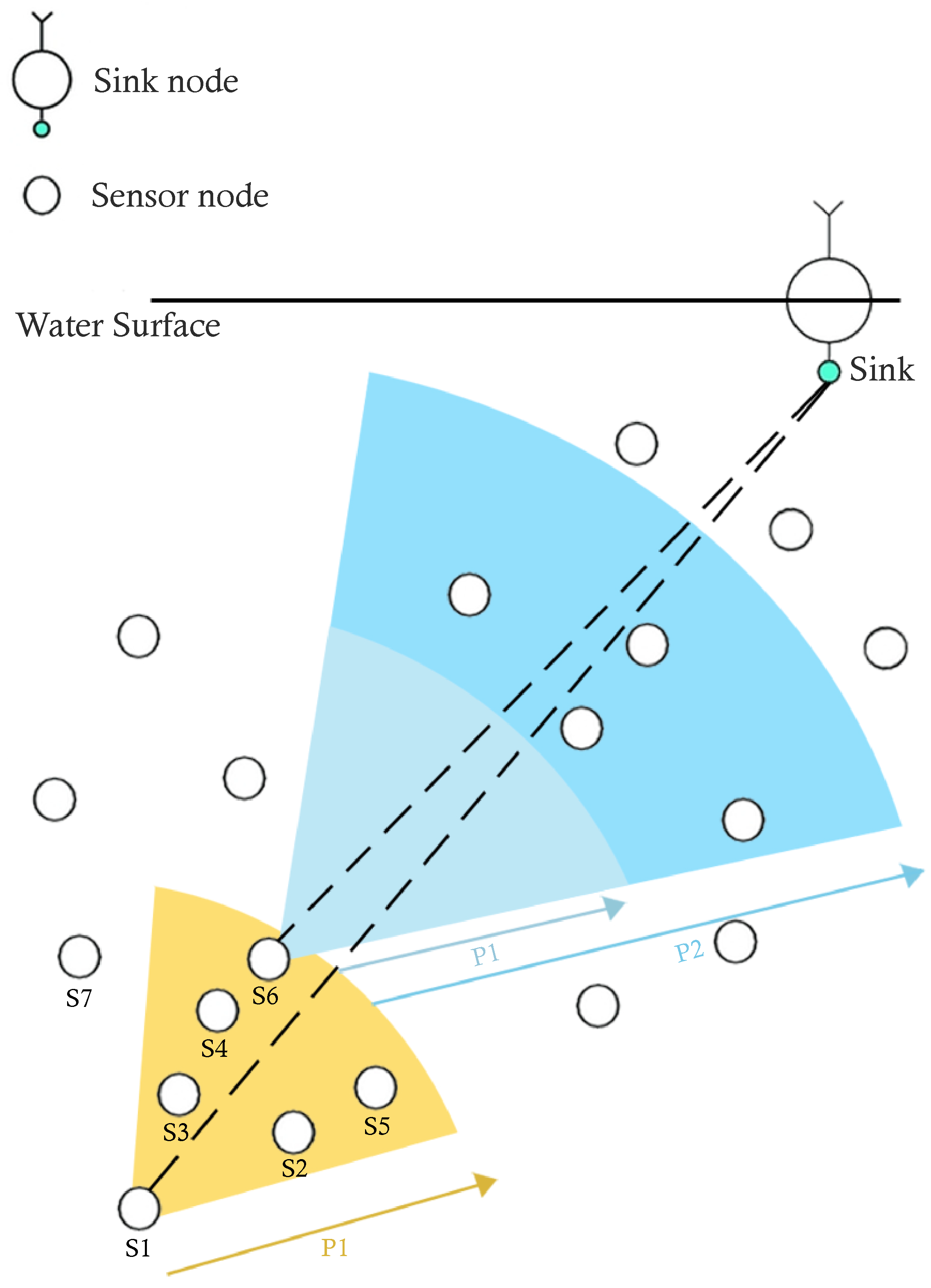
- Using finite levels of power, from minimum power level (P1) to maximum power level (PN). The objective of the use of several levels of power is to transmit data to nearby nodes with less energy than farther nodes. This leads to energy saving.
- Applying the multi-hops transmission method when sending data to a surface sink. Several references have proved that multi-hop transmission saves power. Using multi-hops leads to reducing the distance between the transmitter and the receiver. Thus, if the handshake is used, short distances lead to reducing the duration of RTS/CTS exchange.
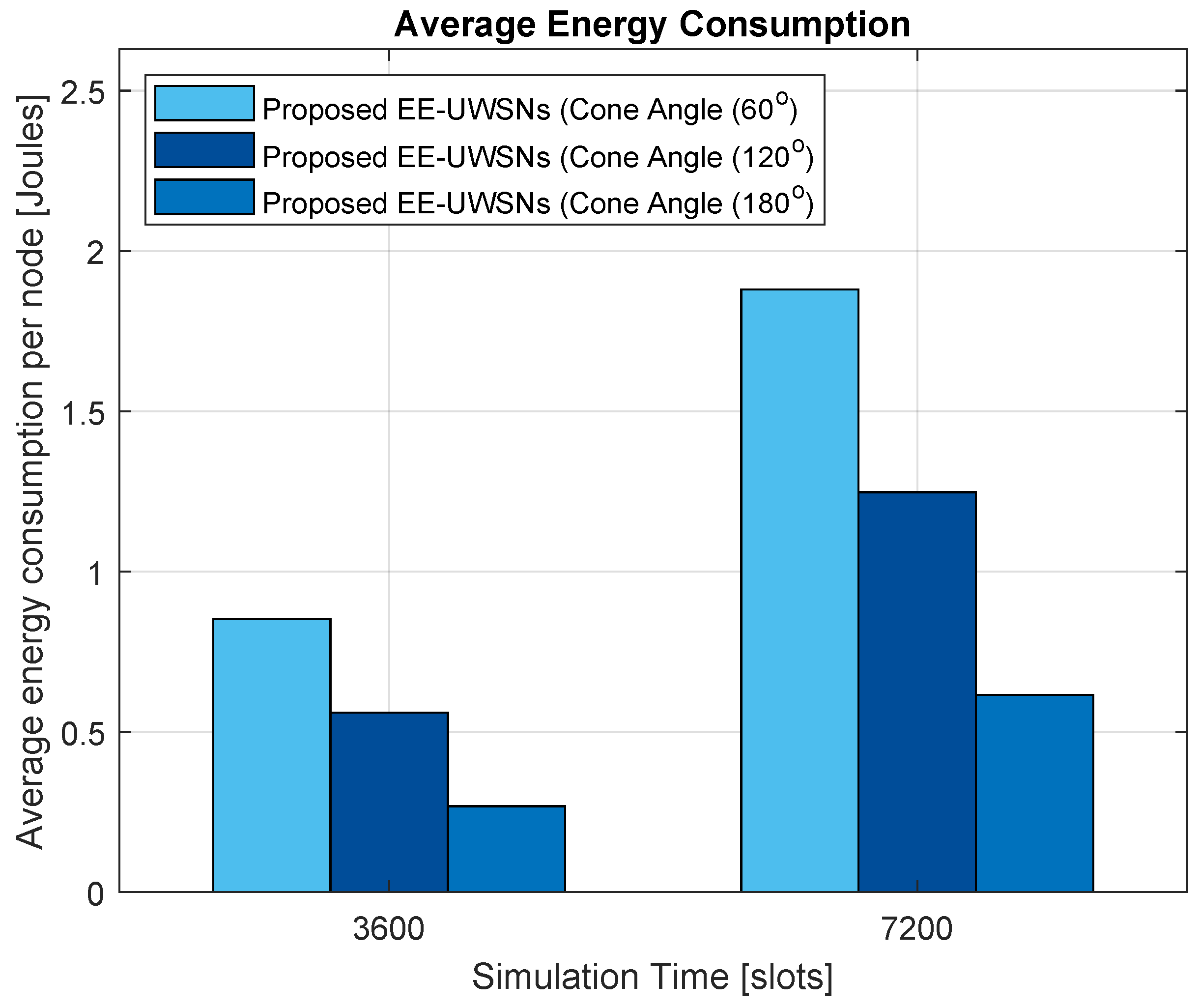
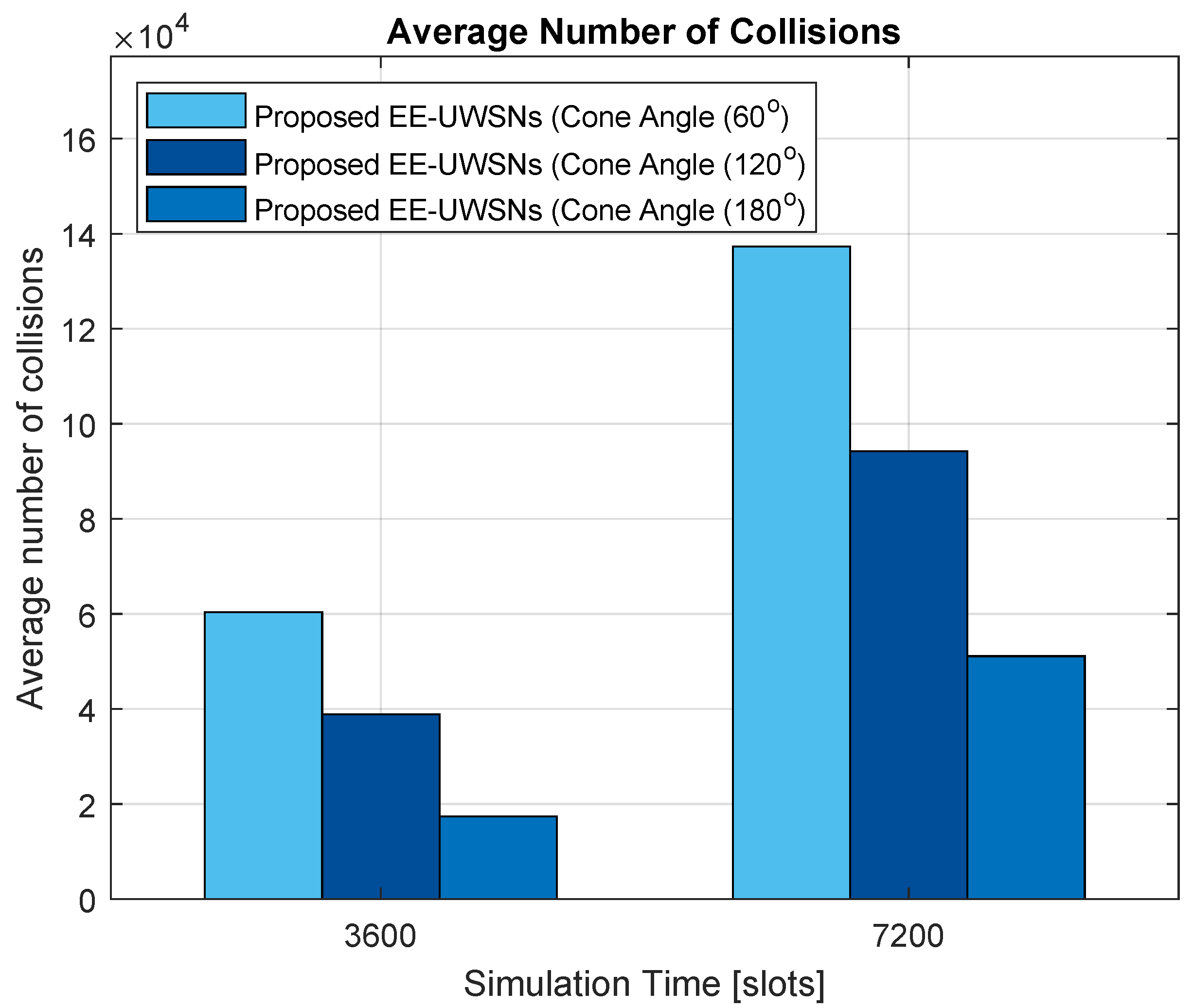
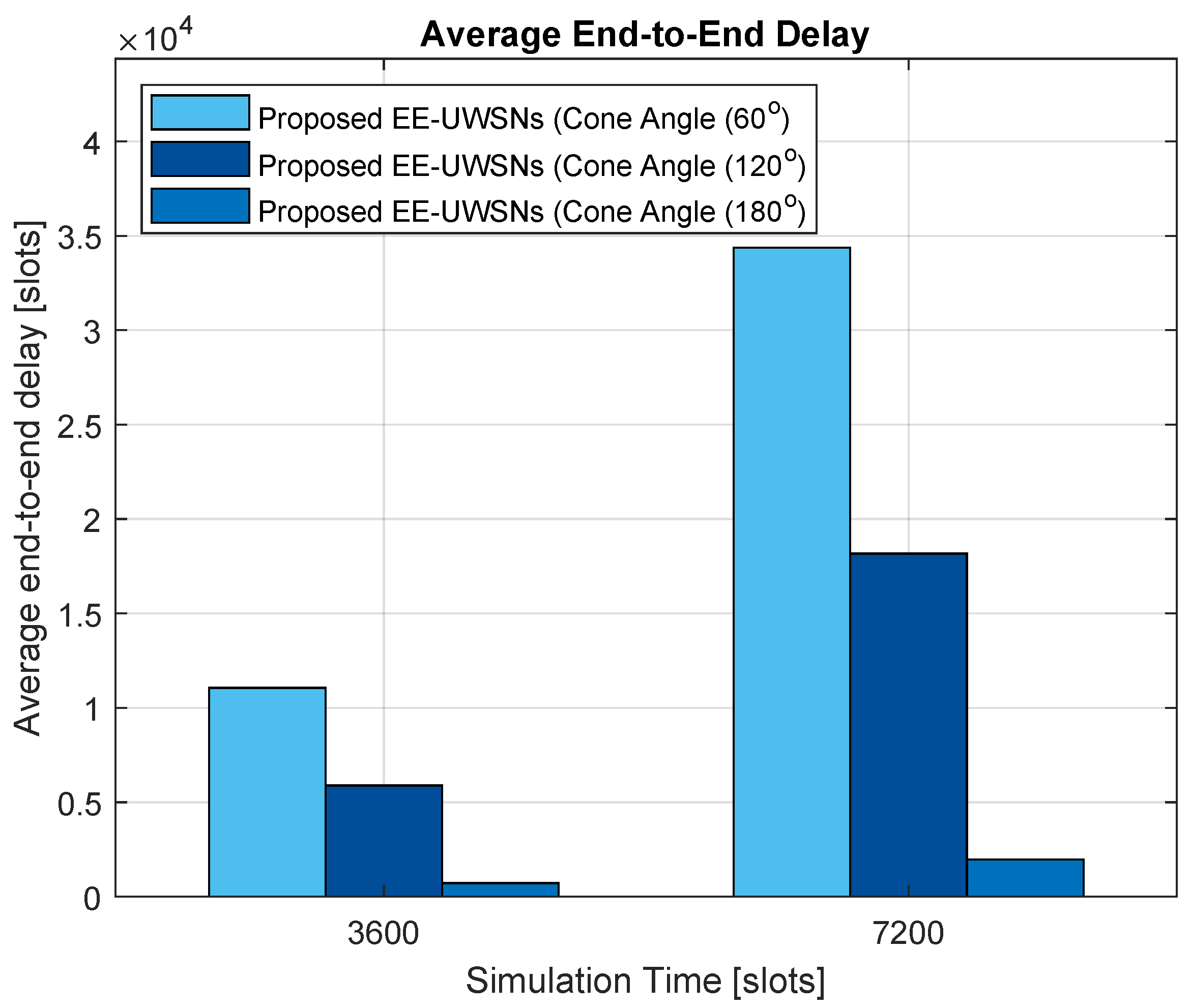
- Narrowing the scope of transmission to a specific area by using a cone angle. When nodes are absent in this area, the angle can be shifted. The idea of narrowing the transmission scope leads to minimizing the number of nodes responsible for forwarding packets. Therefore, this leads to reducing collisions and thus decreasing the energy consumed. In addition, a shifting angle is used in order to avoid loss of data in case of the absence of nodes in a specific cone angle.
- Using the principle of inactivation, where some sensor nodes in the underwater sensor network become inactive. During the period of activation, nodes are powered off (i.e., do not send nor receive). The choosing of inactive nodes is based on the distance to the surface sink, as well as the energy consumption.
- Balancing energy consumption in order to avoid draining the energy of some nodes. This can be accomplished by taking into account the issue of the energy consumed when choosing relay nodes and inactive nodes. The objective of balancing the energy consumption is to prolong the life of the network by avoiding the early death of some nodes.
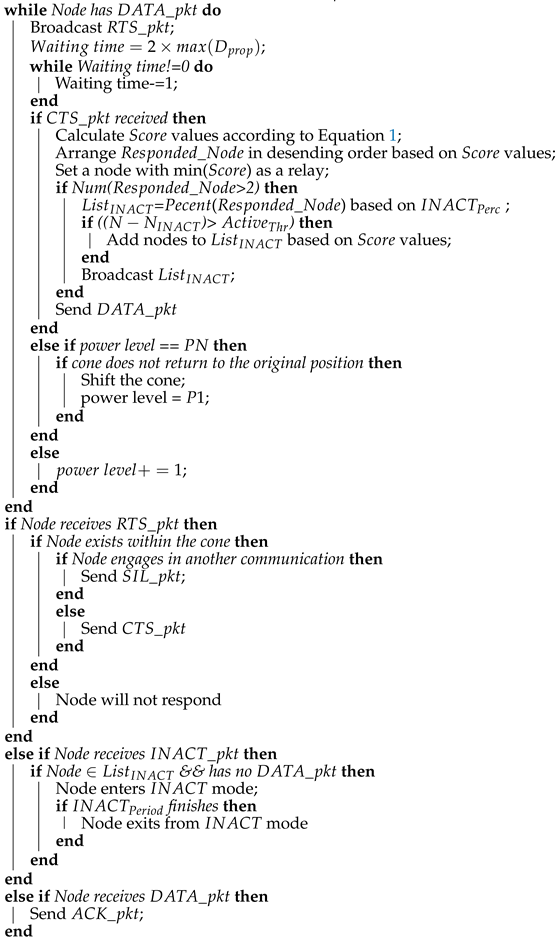
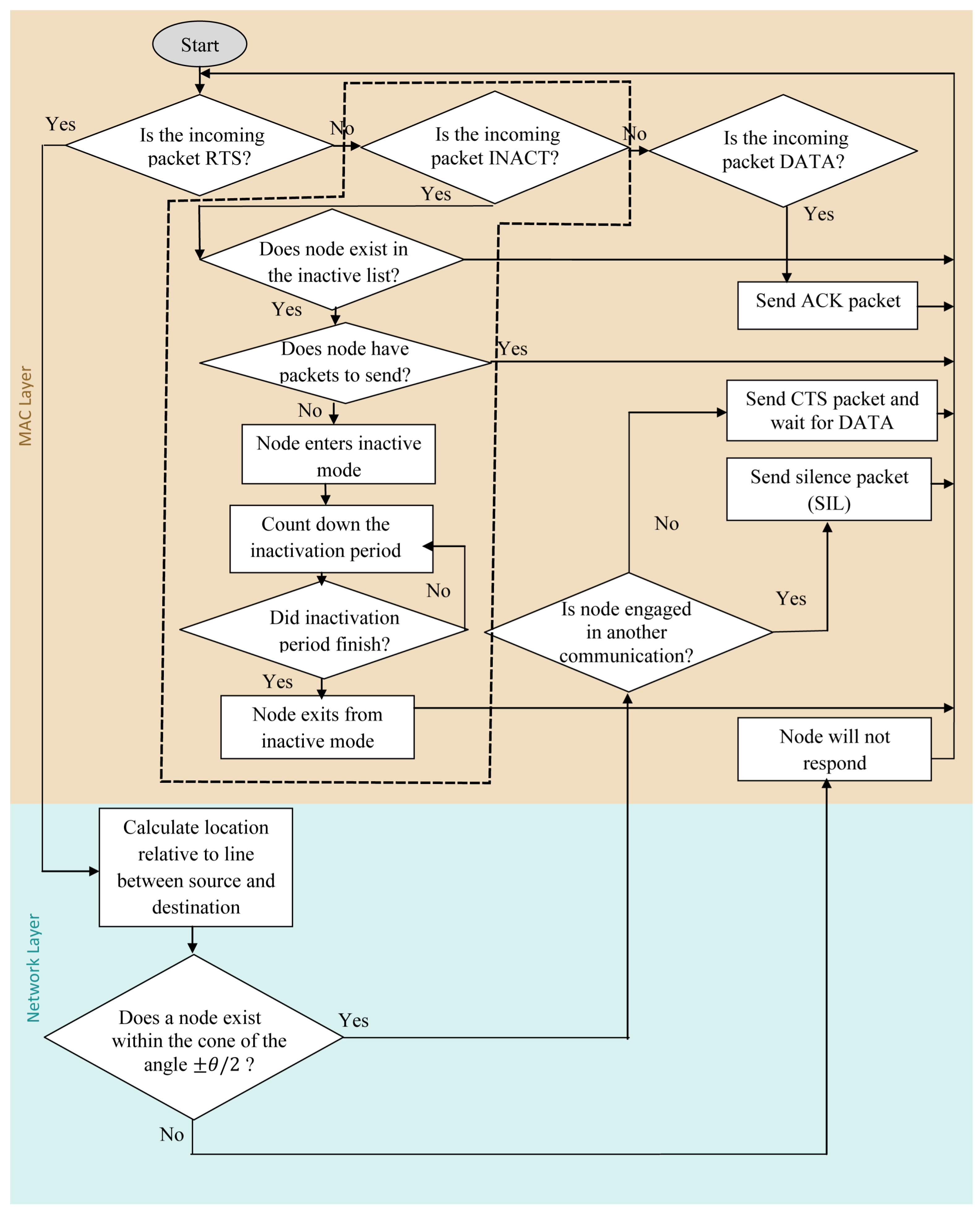
3.2. The Mechanism of the EE-UWSNs Protocol
| Algorithm 1: Pseudocode for the proposed EE-UWSNs protocol. |
Initialize power level; Set , , , , ; |
 |
4. Performance Analysis
4.1. Simulation Tool
4.2. Performance Metrics
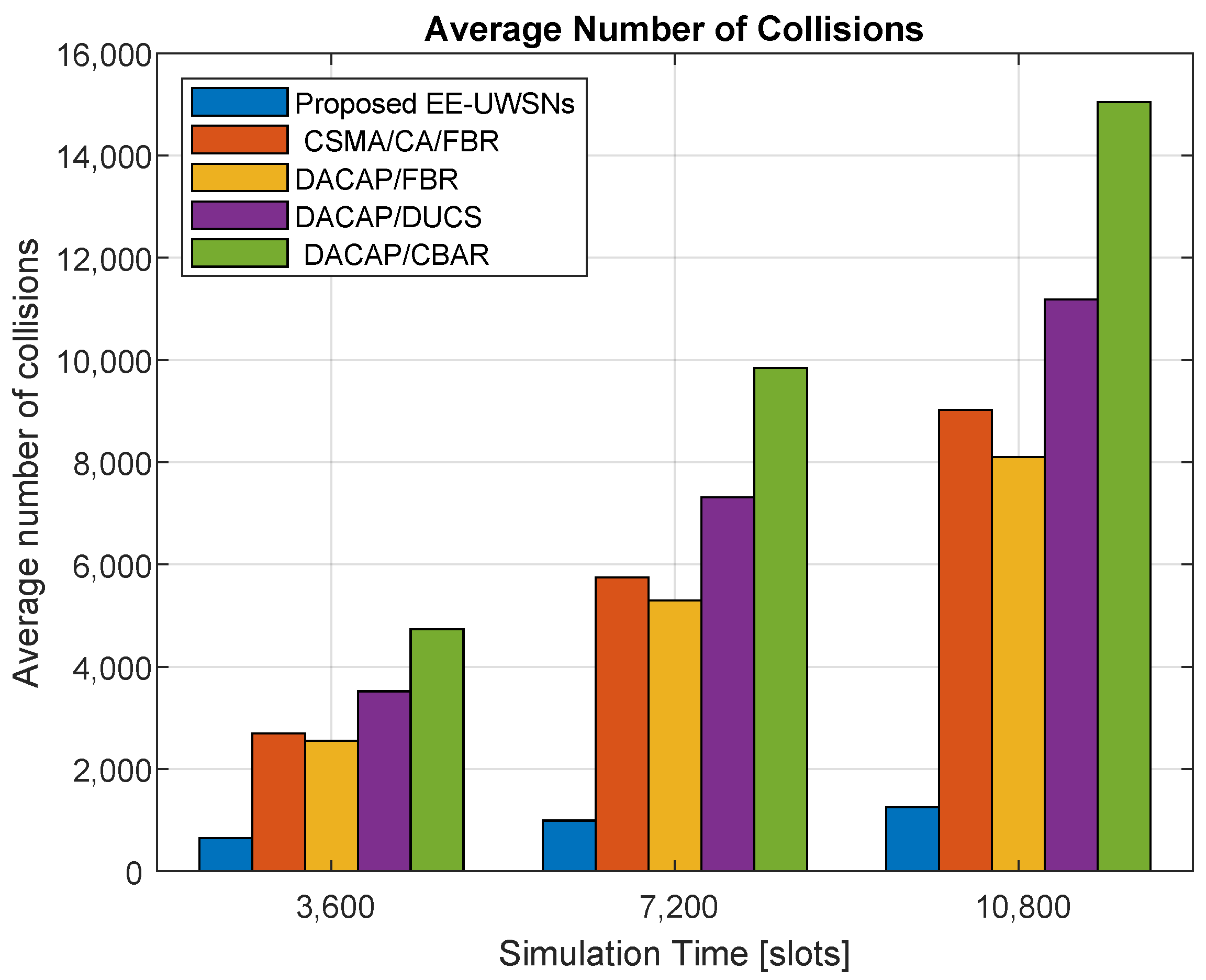
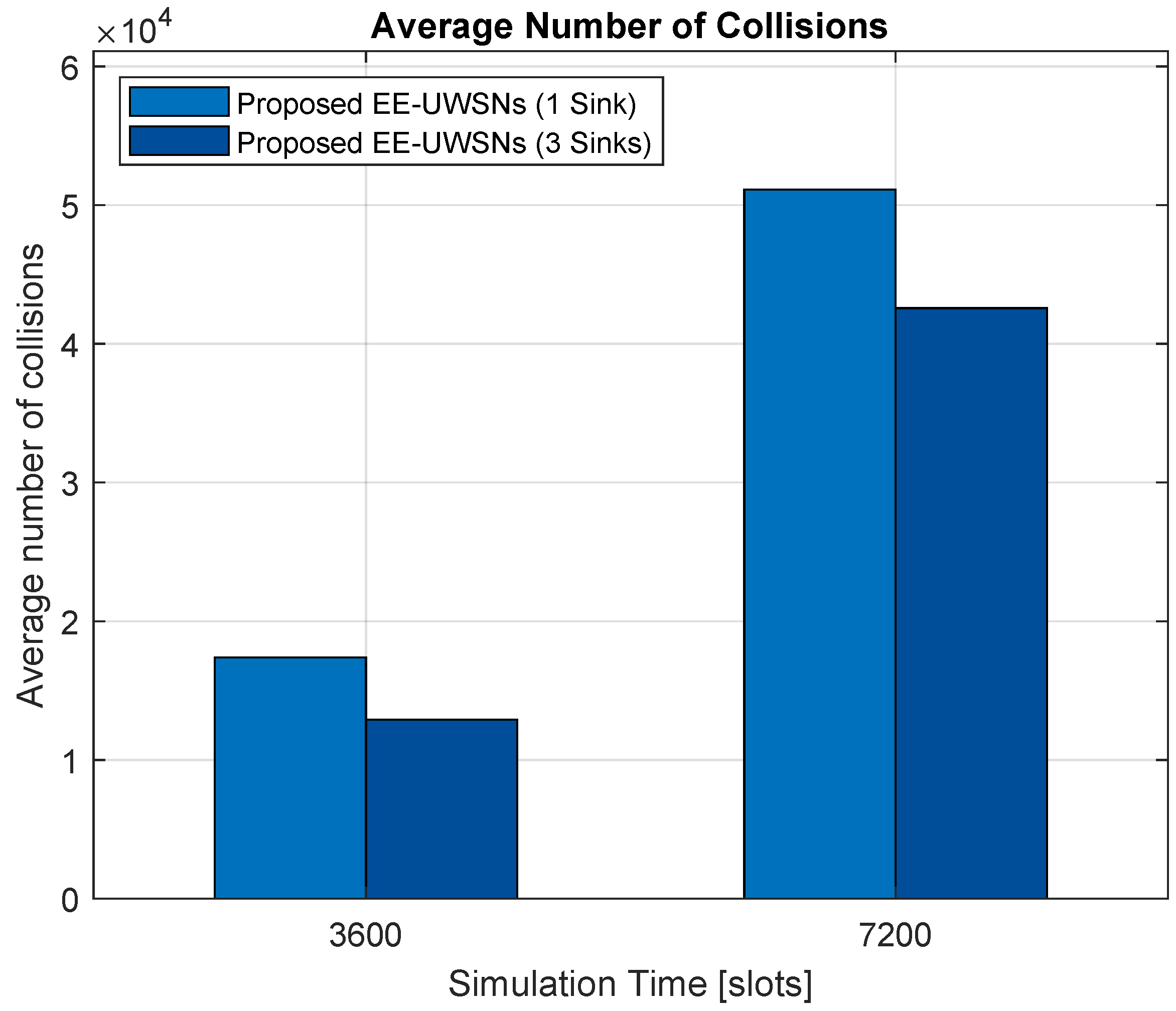
- Number of Collisions: A collision occurs when more than one sensor node sends packets at the same time, resulting in packet corruption [47]. Therefore, the source node needs to retransmit the lost packet and this leads to energy wastage. There are several collision avoidance protocols that are based on using RTS and CTS packets prior to sending data [48]. Decreasing the number of collisions is an important issue to save the energy of sensors.
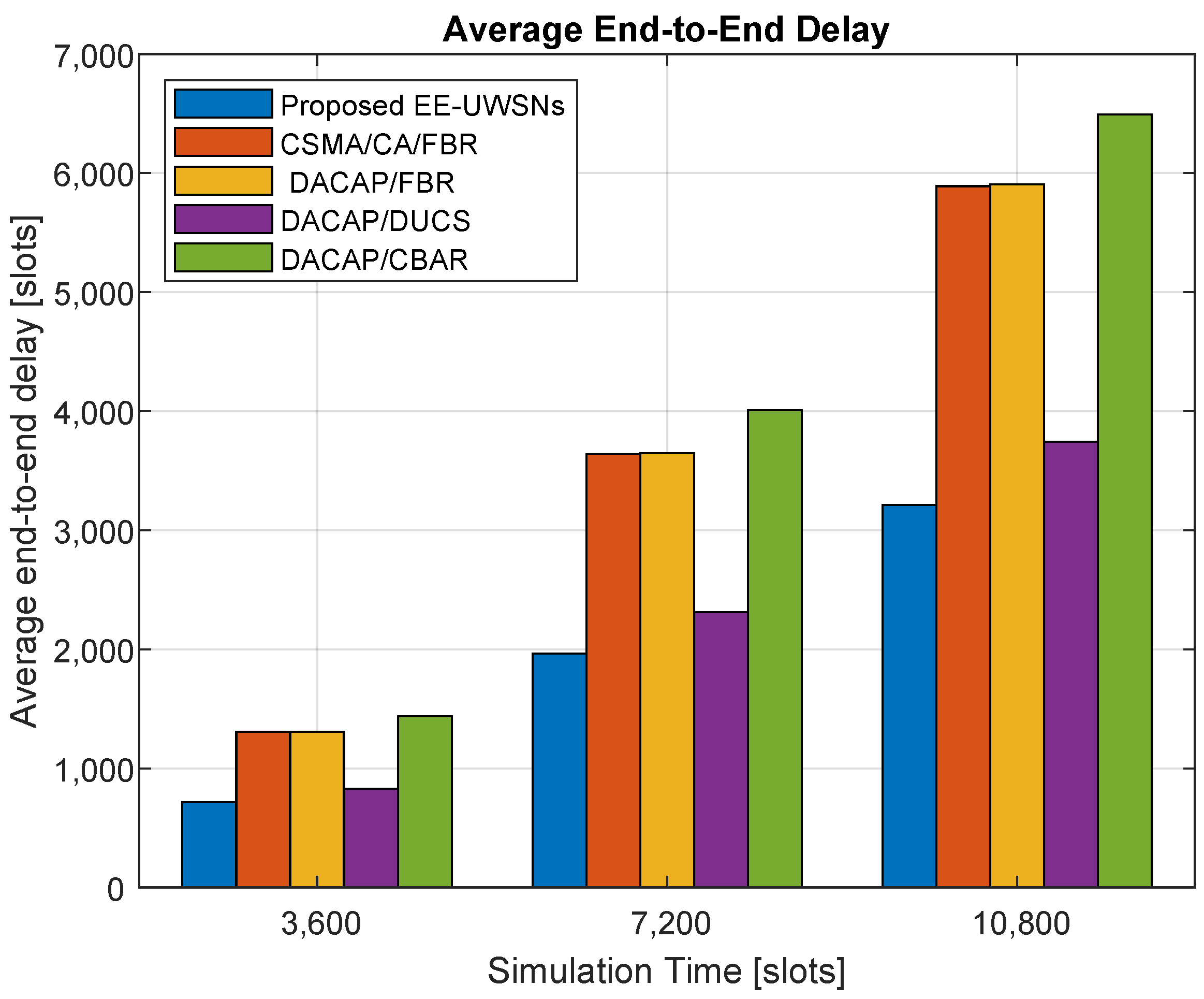
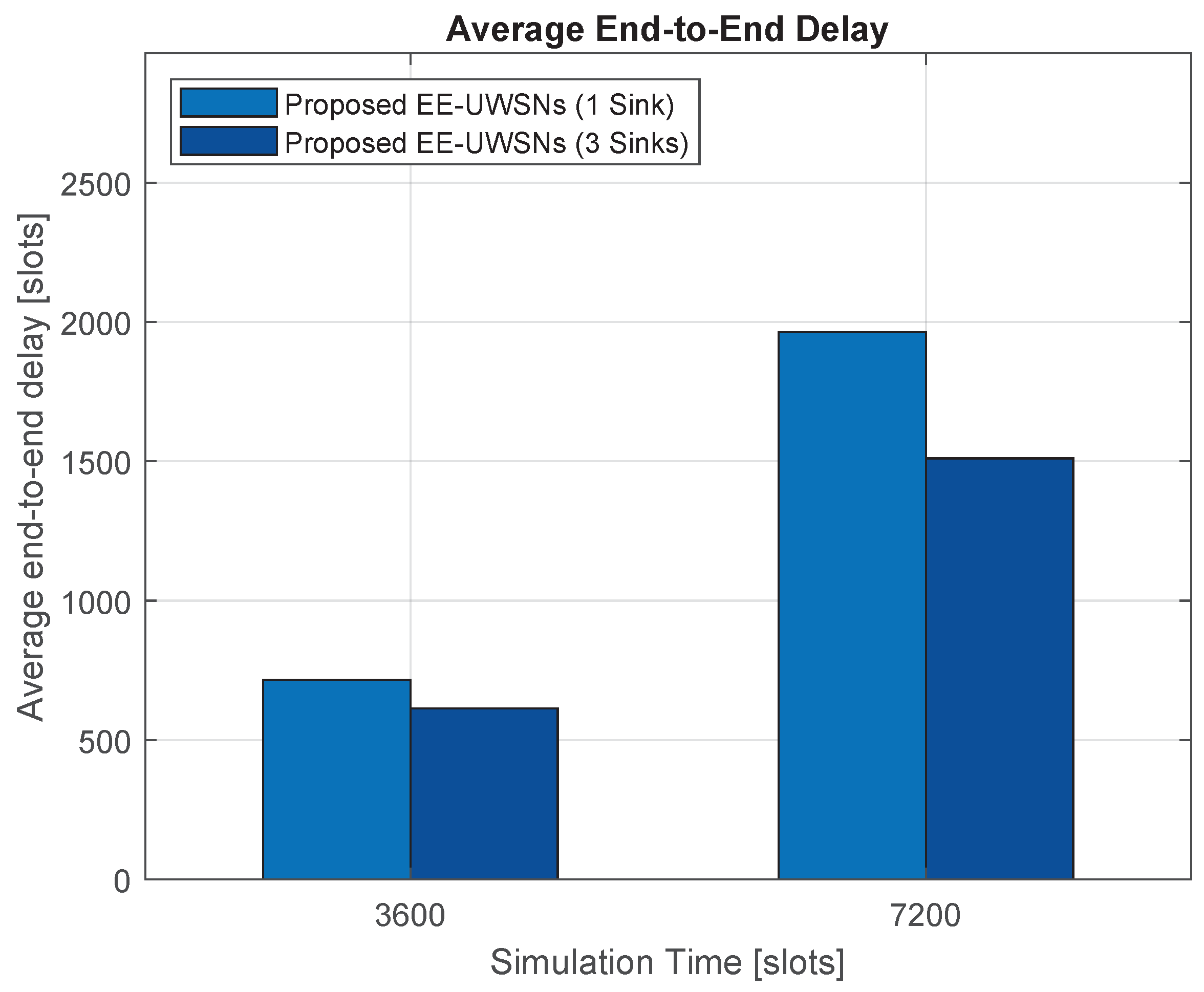
- End-to-End Delay: This is a function of several parameters, which includes the transmission delay, the propagation delay, the queuing delay, processing delay and the number of retransmissions [49]. The transmission delay is calculated by dividing the size of a packet by the transmission rate. The propagation delay can be estimated by dividing the distance between a sensor and a sink by the speed of sound (1500 m/s) [50]. Processing delay refers to the time taken by sensor nodes to process packets [51,52]. The queuing delay is the time that a packet spends waiting in a node’s queue until it departs [53].
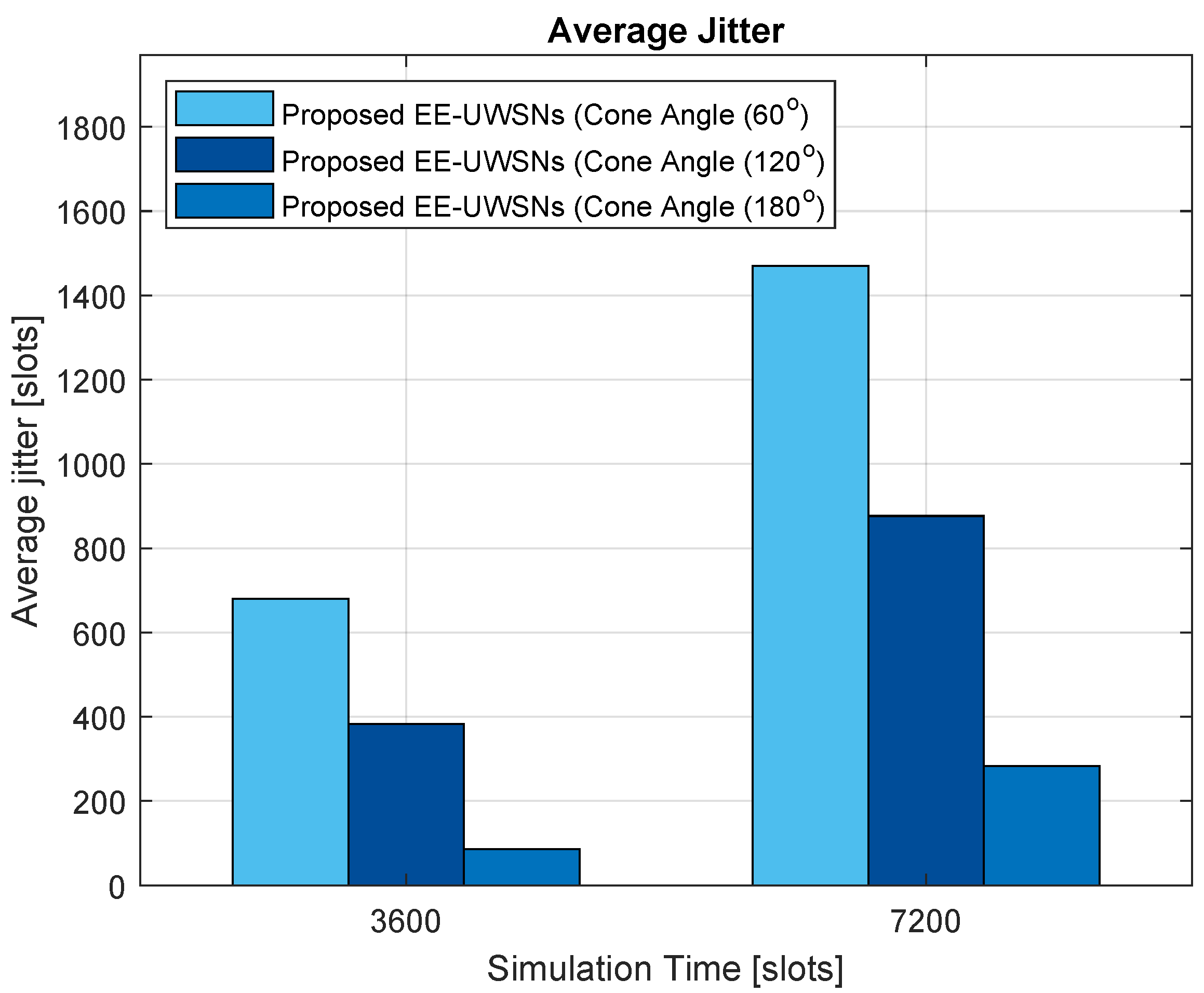
- Jitter: Jitter of the packet delay is a critical factor in determining the quality of service in UWSNs. The jitter is defined as the variation in the packet delays [54].
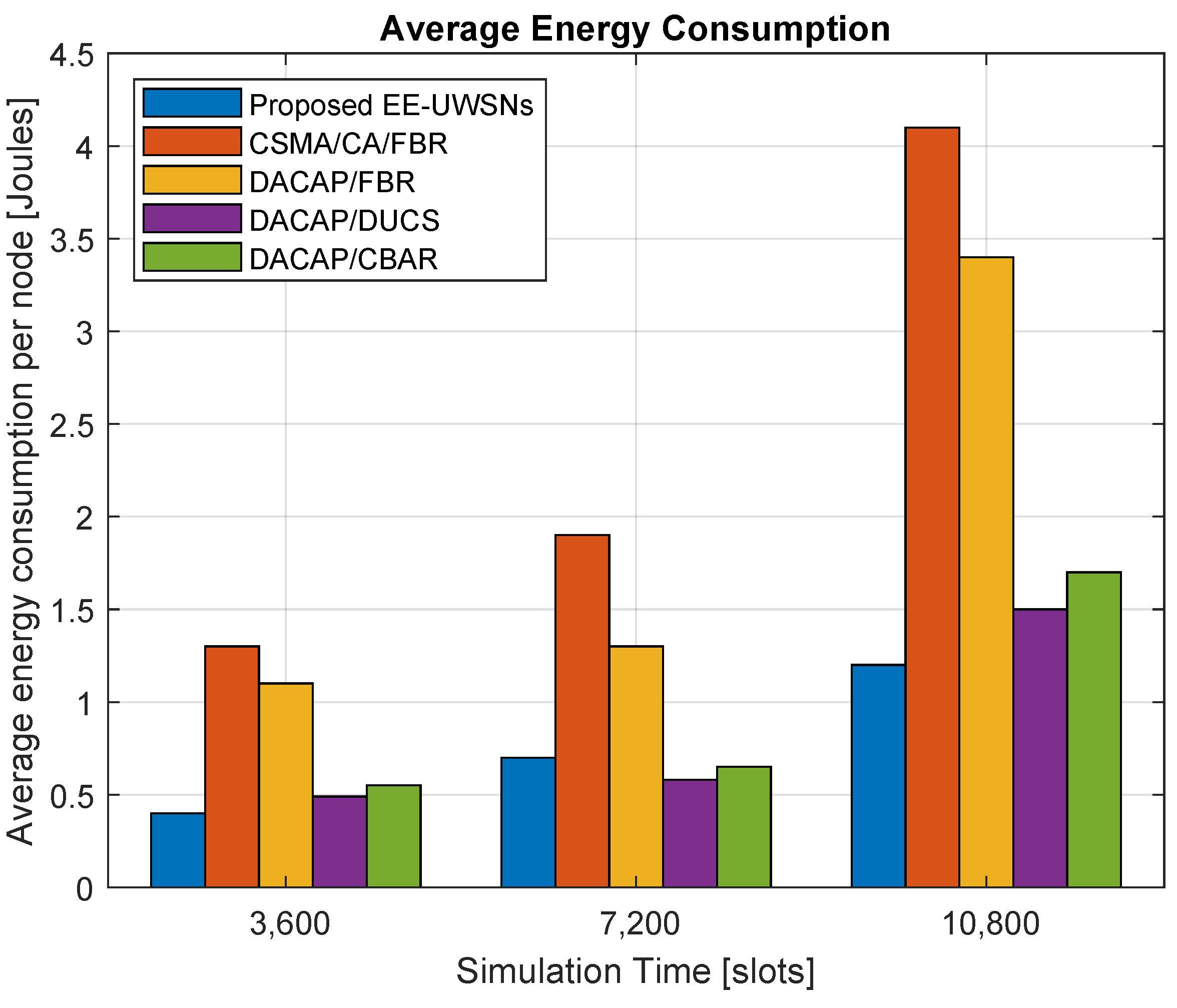
4.3. Simulation Results
4.3.1. Effect of Changing the Cone Angle
4.3.2. Effect of Changing the Number of Sinks
5. Conclusions and Future Work
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| Abbreviation | Explanation |
| 5G | Fifth-Generation |
| ACK | Acknowledgment |
| CA | Collision Avoidance |
| CBAR | Cluster-Based Adaptive Routing |
| CDMA | Code Division Multiple Access |
| CSMA | Carrier Sense Multiple Access |
| CSMA/CA | Carrier Sense Multiple Access/Collision Avoidance |
| CSSTU-MAC | Spatial-Temporal Uncertainty MAC |
| CTS | Clear to Send |
| DACAP | Distance Aware Collision Avoidance Protocol |
| DCO-MAC | Data-Collection-Oriented MAC |
| DEEB | Distributed Energy-Efficient and Balanced |
| DUCS | Distributed Underwater Clustering Scheme |
| ED-MAC | Efficient Depth-based MAC |
| EE-UWSNs | Energy-Efficient protocol for UWSNs |
| FBR | Focused Beam Routing |
| FDMA | Frequency-Division Multiple Access |
| GCORP | Geographic and Cooperative Opportunistic Routing Protocol |
| HSR | Hybrid Sender and Receiver |
| IoT | Internet of Things |
| KPIs | Key Performance Indicators |
| LEACH | Low Energy Algorithm Adaptive Clustering Hierarchy |
| MAC | Medium Access Control |
| MIT | Massachusetts Institute of Technology |
| NCRP | Network Coding Routing Protocol |
| OCMAC | Ordered Contention MAC |
| OVAR | Opportunistic Void Avoidance Routing |
| QDAR | Q-learning based Delay-Aware Routing |
| R-ERP2R | Reliable Energy-efficient Routing Protocol based on Physical distance |
| and Residual energy | |
| RTS | Request to Send |
| TDMA | Time Division Multiple Access |
| UMOD-LEACH | Underwater Modified LEACH |
| UWSNs | Underwater Sensor Networks |
References
- Vithiya, R.; Sharmila, G.; Karthika, S. Enhancing the Performance of Routing Protocol in Underwater Acoustic Sensor Networks. In Proceedings of the 2018 IEEE International Conference on System, Computation, Automation and Networking (ICSCA), Pondicherry, India, 6–7 July 2018; pp. 1–5. [Google Scholar]
- Alhazmi, A.S.; Moustafa, A.I.; AlDosari, F.M. Energy Aware Approach For Underwater Wireless Sensor Networks Scheduling: UMOD_LEACH. In Proceedings of the 2018 21st Saudi Computer Society National Computer Conference (NCC), Riyadh, Saudi Arabia, 25–26 April 2018; pp. 1–5. [Google Scholar]
- Alasarpanahi, H.; Ayatollahitafti, V.; Gandomi, A. Energy-efficient void avoidance geographic routing protocol for underwater sensor networks. Int. J. Commun. Syst. 2020, 33, e4218. [Google Scholar] [CrossRef]
- Tariq, A.; Azam, F.; Anwar, M.W.; Zahoor, T.; Muzaffar, A.W. Recent Trends in Underwater Wireless Sensor Networks (UWSNs)–A Systematic Literature Review. Program. Comput. Softw. 2020, 46, 699–711. [Google Scholar] [CrossRef]
- Hong, Z.; Pan, X.; Chen, P.; Su, X.; Wang, N.; Lu, W. A topology control with energy balance in underwater wireless sensor networks for IoT-based application. Sensors 2018, 18, 2306. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Alablani, I.A.; Arafah, M.A. Enhancing 5G small cell selection: A neural network and IoV-based approach. Sensors 2021, 21, 6361. [Google Scholar] [CrossRef]
- Alablani, I.A.; Arafah, M.A. An Adaptive Cell Selection Scheme for 5G Heterogeneous Ultra-Dense Networks. IEEE Access 2021, 9, 64224–64240. [Google Scholar] [CrossRef]
- Alablani, I.A.; Arafah, M.A. An SDN/ML-Based Adaptive Cell Selection Approach for HetNets: A Real-World Case Study in London, UK. IEEE Access 2021, 9, 166932–166950. [Google Scholar] [CrossRef]
- Haque, K.F.; Kabir, K.H.; Abdelgawad, A. Advancement of routing protocols and applications of underwater wireless sensor network (UWSN)—A survey. J. Sens. Actuator Netw. 2020, 9, 19. [Google Scholar] [CrossRef] [Green Version]
- Alsalman, L.; Alotaibi, E. A Balanced Routing Protocol Based on Machine Learning for Underwater Sensor Networks. IEEE Access 2021, 9, 152082–152097. [Google Scholar] [CrossRef]
- Ahmed, A.; Mitchell, P.D.; Zakharov, Y.; Morozs, N. FD-LTDA-MAC: Full-Duplex Unsynchronised Scheduling in Linear Underwater Acoustic Chain Networks. Appl. Sci. 2021, 11, 10967. [Google Scholar] [CrossRef]
- Alfouzan, F.A. Energy-efficient collision avoidance MAC protocols for underwater sensor networks: Survey and challenges. J. Mar. Sci. Eng. 2021, 9, 741. [Google Scholar] [CrossRef]
- KM, D.R.; Yum, S.H.; Ko, E.; Shin, S.Y.; Namgung, J.I.; Park, S.H. Multi-Media and Multi-Band based adaptation layer techniques for underwater sensor networks. Appl. Sci. 2019, 9, 3187. [Google Scholar]
- Zhang, L. Underwater Acoustic Sensor Networks Protocol Design Energy Efficient and Traffic-Aware Detour Tree for Geographic Routing; Lap Lambert Academic Publisher: Sunnyvale, CA, USA, 2012. [Google Scholar]
- Wati, S.; Rakesh, N.; Astya, P.N. Data communication Issues in Underwater Sensor Network. In Proceedings of the 2019 International Conference on Computing, Communication, and Intelligent Systems (ICCCIS), Greater Noida, India, 18–19 October 2019; pp. 150–155. [Google Scholar] [CrossRef]
- Wang, M.; Chen, Y.; Sun, X.; Xiao, F.; Xu, X. Node Energy Consumption Balanced Multi-Hop Transmission for Underwater Acoustic Sensor Networks Based on Clustering Algorithm. IEEE Access 2020, 8, 191231–191241. [Google Scholar] [CrossRef]
- Chander, B. Wearable sensor networks for patient health monitoring: Challenges, applications, future directions, and acoustic sensor challenges. In Healthcare Paradigms in the Internet of Things Ecosystem; Elsevier: Amsterdam, The Netherlands, 2021; pp. 189–221. [Google Scholar]
- Gul, H.; Ullah, G.; Khan, M.; Khan, Y. EERBCR: Energy-efficient regional based cooperative routing protocol for underwater sensor networks with sink mobility. J. Ambient Intell. Humaniz. Comput. 2021, 1–13. [Google Scholar] [CrossRef]
- Pabani, J.K.; Luque-Nieto, M.Á.; Hyder, W.; Otero, P. Energy-efficient packet forwarding scheme based on fuzzy decision-making in underwater sensor networks. Sensors 2021, 21, 4368. [Google Scholar] [CrossRef]
- Zala, D.; Thummar, D.; Chandavarkar, B.R. Mitigating Blackhole attack of Underwater Sensor Networks. In Proceedings of the 2021 12th International Conference on Computing Communication and Networking Technologies (ICCCNT), Kharagpur, India, 6–8 July 2021; pp. 1–8. [Google Scholar] [CrossRef]
- Zhang, H.; Wang, F. Wireless Sensor Energy Harvesting and Management. In Smart Communications, Intelligent Algorithms and Interactive Methods; Springer: Berlin/Heidelberg, Germany, 2022; pp. 299–306. [Google Scholar]
- Bollapragada Subrahmanya, V.; Russell, H.B. RMTS: A novel approach to transmission scheduling in ad hoc networks by salvaging unused slot transmission assignments. Wirel. Commun. Mob. Comput. 2018, 2018, 2484897. [Google Scholar] [CrossRef]
- Kwon, J.H.; Zhang, X.; Kim, E.J. Scalable Wi-Fi Backscatter Uplink Multiple Access for Battery-Free Internet of Things. IEEE Access 2021, 9, 30929–30945. [Google Scholar] [CrossRef]
- Mun, G.; Kim, H.W.; Kim, D. Implementation of CSMA/CA state diagram for swarm drone network. In Proceedings of the 2021 International Conference on Information and Communication Technology Convergence (ICTC), Jeju Island, Korea, 20–22 October2021; pp. 1254–1257. [Google Scholar] [CrossRef]
- Youssef, Z.; Majeed, E.; Mueck, M.D.; Karls, I.; Drewes, C.; Bruck, G.; Jung, P. Performance Enhancement of the CSMA/CA MAC Mechanisms Using a Reject Request to Send (RRTS) Message for 3.5 GHz Shared Spectrum Systems. In Proceedings of the 2018 International Conference on Wireless Communications, Signal Processing and Networking (WiSPNET), Chennai, India, 22–24 March 2018; pp. 1–8. [Google Scholar] [CrossRef]
- Peleato, B.; Stojanovic, M. Distance aware collision avoidance protocol for ad-hoc underwater acoustic sensor networks. IEEE Commun. Lett. 2007, 11, 1025–1027. [Google Scholar] [CrossRef]
- Lee, J.W.; Cho, H.S. A hybrid sender-and receiver-initiated protocol scheme in underwater acoustic sensor networks. Sensors 2015, 15, 28052–28069. [Google Scholar] [CrossRef]
- Alfouzan, F.; Shahrabi, A.; Ghoreyshi, S.M.; Boutaleb, T. An efficient scalable scheduling MAC protocol for underwater sensor networks. Sensors 2018, 18, 2806. [Google Scholar] [CrossRef] [Green Version]
- Deng, M.; Chen, H.; Xie, L. DCO-MAC: A hybrid MAC protocol for data collection in underwater acoustic sensor networks. Sensors 2018, 18, 2300. [Google Scholar] [CrossRef] [Green Version]
- Ammar, M.; Ibrahimi, K.; Jouhari, M.; Ben-Othman, J. MAC Protocol-Based Depth Adjustment and Splitting Mechanism for UnderWater Sensor Network (UWSN). In Proceedings of the 2018 IEEE Global Communications Conference (GLOBECOM), Abu Dhabi, United Arab Emirates, 9–13 December 2018; pp. 1–6. [Google Scholar] [CrossRef]
- Roy, A.; Sarma, N. A synchronous duty-cycled reservation based MAC protocol for underwater wireless sensor networks. Digit. Commun. Netw. 2021, 7, 385–398. [Google Scholar] [CrossRef]
- Liu, X.; Du, X.; Li, M.; Wang, L.; Li, C. A MAC Protocol of Concurrent Scheduling Based on Spatial-Temporal Uncertainty for Underwater Sensor Networks. J. Sens. 2021, 2021, 5558078. [Google Scholar] [CrossRef]
- Jornet, J.M.; Stojanovic, M.; Zorzi, M. Focused beam routing protocol for underwater acoustic networks. In Proceedings of the Third ACM International Workshop on Underwater Networks, Shenzhen, China, 3–5 December 2008; ACM: Cambridge, MA, USA, 2008; pp. 75–82. [Google Scholar]
- Ayaz, M.; Baig, I.; Abdullah, A.; Faye, I. A survey on routing techniques in underwater wireless sensor networks. J. Netw. Comput. Appl. 2011, 34, 1908–1927. [Google Scholar] [CrossRef]
- Domingo, M.C.; Prior, R. Design and analysis of a GPS-free routing protocol for underwater wireless sensor networks in deep water. In Proceedings of the 2007 International Conference on Sensor Technologies and Applications, Valencia, Spain, 14–20 October 2007; pp. 215–220. [Google Scholar]
- Wahid, A.; Lee, S.; Kim, D. A reliable and energy-efficient routing protocol for underwater wireless sensor networks. Int. J. Commun. Syst. 2014, 27, 2048–2062. [Google Scholar] [CrossRef]
- Ahmed, S.; Khan, I.; Rasheed, M.B.; Ilahi, M.; Khan, R.; Bouk, S.H.; Javaid, N. Comparative analysis of routing protocols for under water wireless sensor networks. arXiv 2013, arXiv:1306.1148. [Google Scholar]
- Ghoreyshi, S.M.; Shahrabi, A.; Boutaleb, T. A novel cooperative opportunistic routing scheme for underwater sensor networks. Sensors 2016, 16, 297. [Google Scholar] [CrossRef]
- Jin, Z.; Ma, Y.; Su, Y.; Li, S.; Fu, X. A Q-learning-based delay-aware routing algorithm to extend the lifetime of underwater sensor networks. Sensors 2017, 17, 1660. [Google Scholar] [CrossRef] [Green Version]
- Wang, H.; Wang, S.; Bu, R.; Zhang, E. A novel cross-layer routing protocol based on network coding for underwater sensor networks. Sensors 2017, 17, 1821. [Google Scholar] [CrossRef] [Green Version]
- Liu, J.; Yin, H.; Xing, F.; Ji, X.; Wu, B. An Energy-Efficient Routing Algorithm for Underwater Wireless Optical Sensor Network. In Proceedings of the 2018 10th International Conference on Communication Software and Networks (ICCSN), Chongqing, China, 10–12 June 2018; pp. 95–98. [Google Scholar]
- Zou, Z.; Lin, X.; Sun, J. A Cluster-Based Adaptive Routing Algorithm for Underwater Acoustic Sensor Networks. In Proceedings of the 2019 International Conference on Intelligent Computing, Automation and Systems (ICICAS), Chongqing, China, 6–8 December 2019; pp. 302–310. [Google Scholar] [CrossRef]
- Zhang, M.; Cai, W. Energy-Efficient Depth Based Probabilistic Routing Within 2-Hop Neighborhood for Underwater Sensor Networks. IEEE Sens. Lett. 2020, 4, 1–4. [Google Scholar] [CrossRef]
- Karim, S.; Shaikh, F.K.; Chowdhry, B.S.; Mehmood, Z.; Tariq, U.; Naqvi, R.A.; Ahmed, A. GCORP: Geographic and Cooperative Opportunistic Routing Protocol for Underwater Sensor Networks. IEEE Access 2021, 9, 27650–27667. [Google Scholar] [CrossRef]
- Elshrkawey, M.; Elsherif, S.M.; Wahed, M.E. An enhancement approach for reducing the energy consumption in wireless sensor networks. J. King Saud Univ. Comput. Inf. Sci. 2018, 30, 259–267. [Google Scholar] [CrossRef]
- Nguyen, C.T.; Mai, V.V.; Nguyen, C.T. Probing Packet Retransmission Scheme in Underwater Optical Wireless Communication With Energy Harvesting. IEEE Access 2021, 9, 34287–34297. [Google Scholar] [CrossRef]
- Fahmy, H.M.A. Cross-Layer Protocols for WSNs. In Concepts, Applications, Experimentation and Analysis of Wireless Sensor Networks; Springer: Berlin/Heidelberg, Germany, 2021; pp. 267–335. [Google Scholar]
- Songzou, L.; Iqbal, B.; Khan, I.U.; Li, H.; Qiao, G. An Enhanced Full-Duplex MAC Protocol for an Underwater Acoustic Network. In Proceedings of the 2021 International Bhurban Conference on Applied Sciences and Technologies (IBCAST), Islamabad, Pakistan, 12–16 January 2021; pp. 894–898. [Google Scholar] [CrossRef]
- Alablani, I.A.; Arafah, M.A. Applying a Dwell Time-Based 5G V2X Cell Selection Strategy in the City of Los Angeles, California. IEEE Access 2021, 9, 153909–153925. [Google Scholar] [CrossRef]
- Iqbal, B.; Liu, S.; Ullah Khan, I. Multiple RTS and DATA Receptions in a Loop-Based Underwater Propagation Delay Aware MAC Protocol. In Proceedings of the 2021 OES China Ocean Acoustics (COA), Harbin, China, 14–17 July 2021; pp. 665–669. [Google Scholar] [CrossRef]
- Alablani, I.; Alenazi, M. EDTD-SC: An IoT sensor deployment strategy for smart cities. Sensors 2020, 20, 7191. [Google Scholar] [CrossRef]
- Alablani, I.; Alenazi, M. Performance Evaluation of Sensor Deployment Strategies in WSNs Towards IoT. In Proceedings of the 2019 IEEE/ACS 16th International Conference on Computer Systems and Applications (AICCSA), Abu Dhabi, United Arab Emirates, 3–7 November 2019; pp. 1–8. [Google Scholar] [CrossRef]
- Farhan, L.; Alzubaidi, L.; Abdulsalam, M.; Abboud, A.J.; Hammoudeh, M.; Kharel, R. An efficient data packet scheduling scheme for Internet of Things networks. In Proceedings of the 2018 1st International Scientific Conference of Engineering Sciences—3rd Scientific Conference of Engineering Science (ISCES), Diyala, Iraq, 10–11 January 2018; pp. 1–6. [Google Scholar] [CrossRef]
- Kartashevskiy, V.; Buranova, M. Analysis of Packet Jitter in Multiservice Network. In Proceedings of the 2018 International Scientific-Practical Conference Problems of Infocommunications, Science and Technology (PICST), Kharkiv, Ukraine, 9–12 October 2018; pp. 797–802. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| Volume (km3) | 1 |
| Packet Size (Bytes) | 500 |
| Node Starting Energy (Joules) | 150 |
| No. Sensors | 27 |
| No. Sinks | [1,3] |
| Interarrival Time (Time slots) | Possion, T = 240 |
| Inactivation Period (Time slots) | 600 |
| Inactivate Nodes Percentage (%) | 50 |
| Active Nodes Threshold | 7 |
| Cone Angle | [60,120,180] |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Alablani, I.A.; Arafah, M.A. EE-UWSNs: A Joint Energy-Efficient MAC and Routing Protocol for Underwater Sensor Networks. J. Mar. Sci. Eng. 2022, 10, 488. https://doi.org/10.3390/jmse10040488
Alablani IA, Arafah MA. EE-UWSNs: A Joint Energy-Efficient MAC and Routing Protocol for Underwater Sensor Networks. Journal of Marine Science and Engineering. 2022; 10(4):488. https://doi.org/10.3390/jmse10040488
Chicago/Turabian StyleAlablani, Ibtihal Ahmed, and Mohammed Amer Arafah. 2022. "EE-UWSNs: A Joint Energy-Efficient MAC and Routing Protocol for Underwater Sensor Networks" Journal of Marine Science and Engineering 10, no. 4: 488. https://doi.org/10.3390/jmse10040488
APA StyleAlablani, I. A., & Arafah, M. A. (2022). EE-UWSNs: A Joint Energy-Efficient MAC and Routing Protocol for Underwater Sensor Networks. Journal of Marine Science and Engineering, 10(4), 488. https://doi.org/10.3390/jmse10040488