
Analytical Investigation of Tension Loads Acting on a TLP Floating Wind Turbine

 ,
, 
 and
and 
Abstract
:1. Introduction
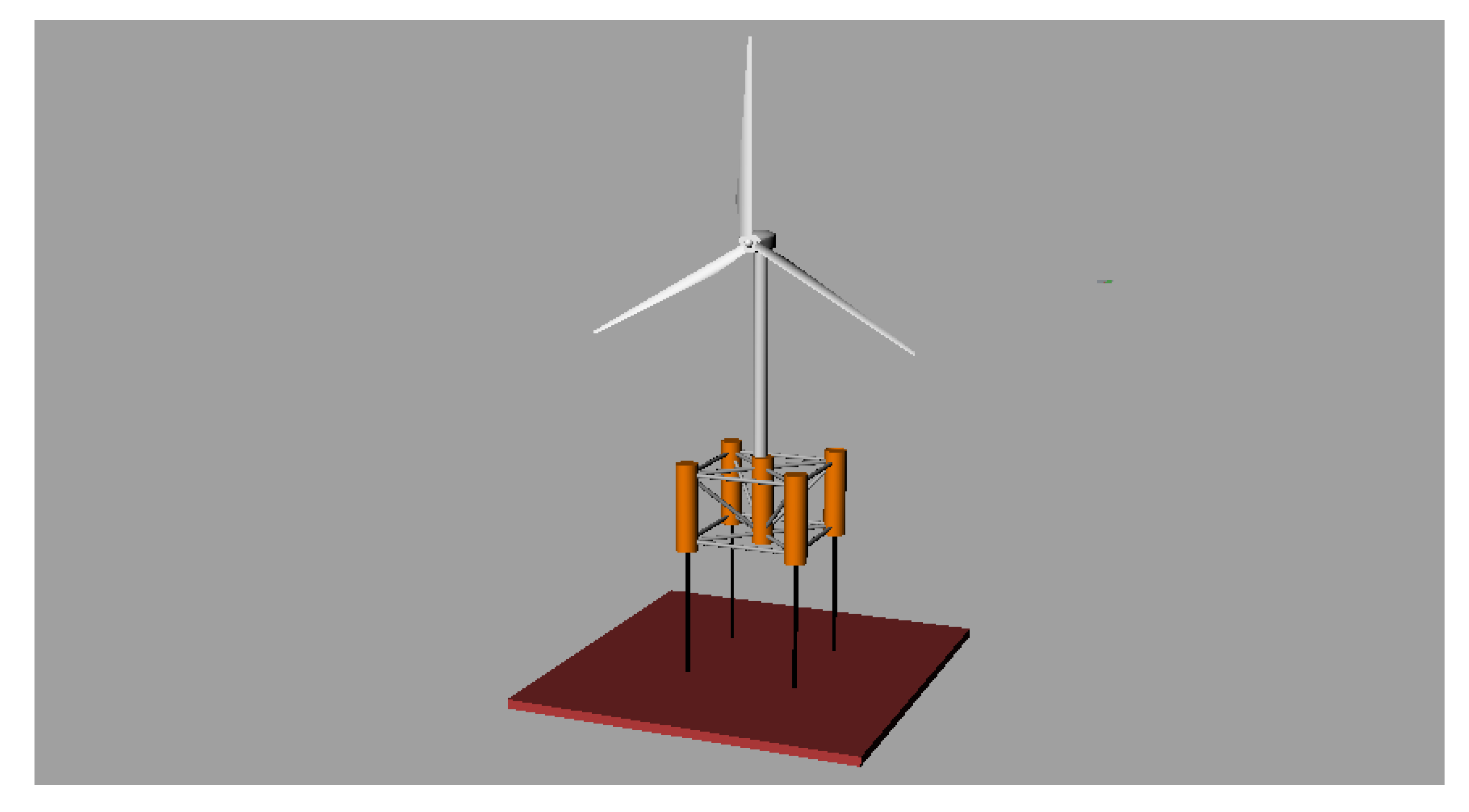
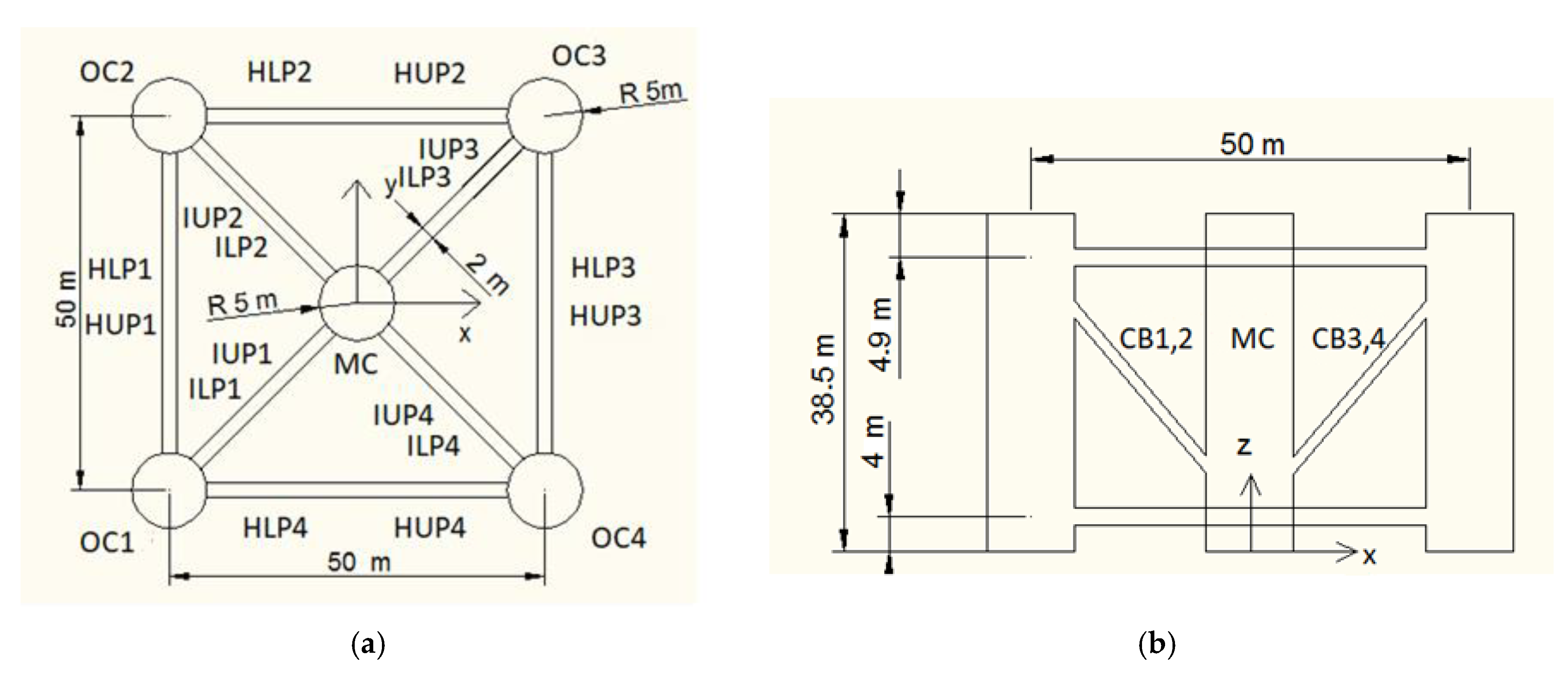
2. Description of the Floating Platform
3. Formulation of the Hydrodynamic Problem and the Role of the WT
4. The Mooring System
5. Coupled Motion Equations
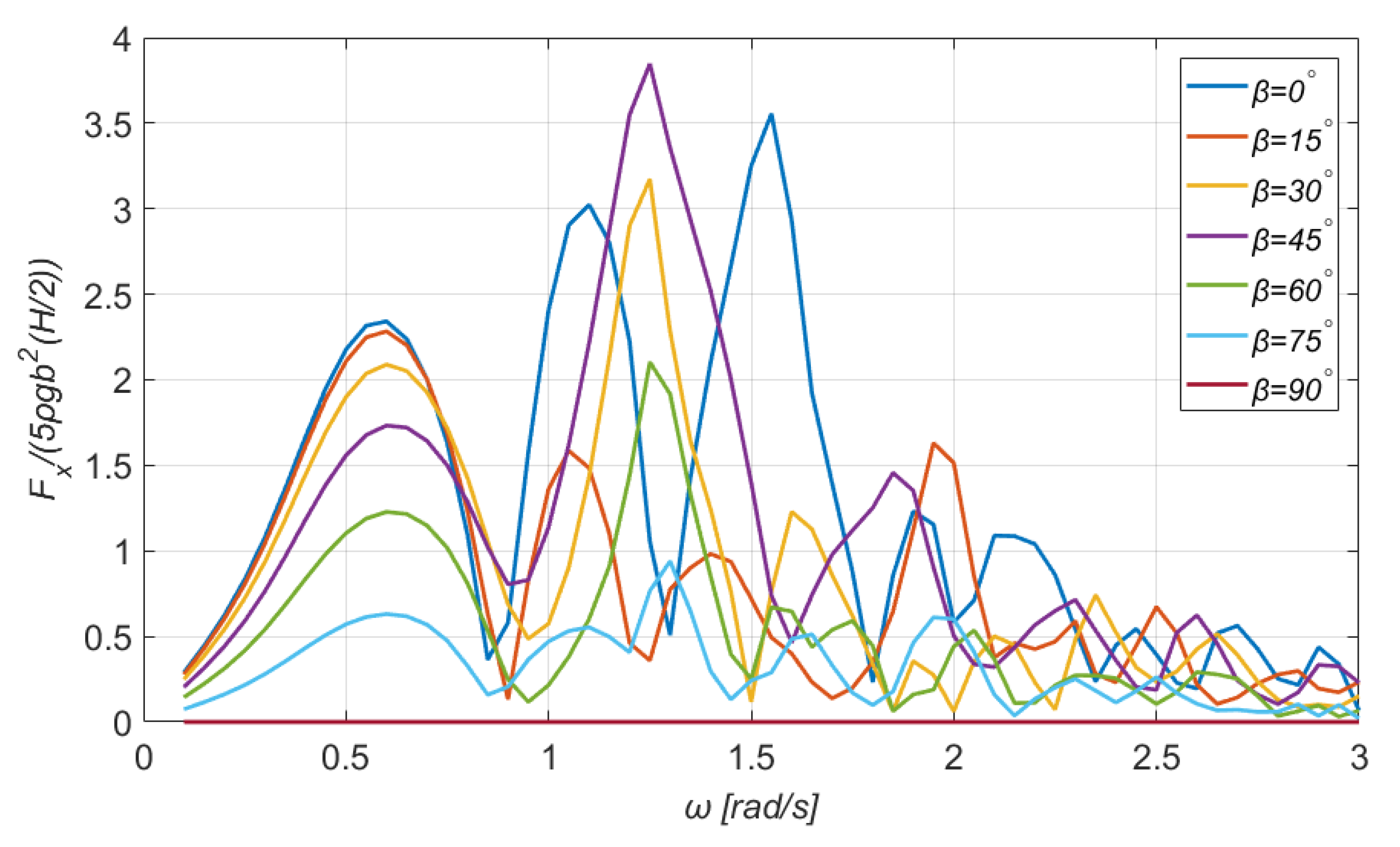
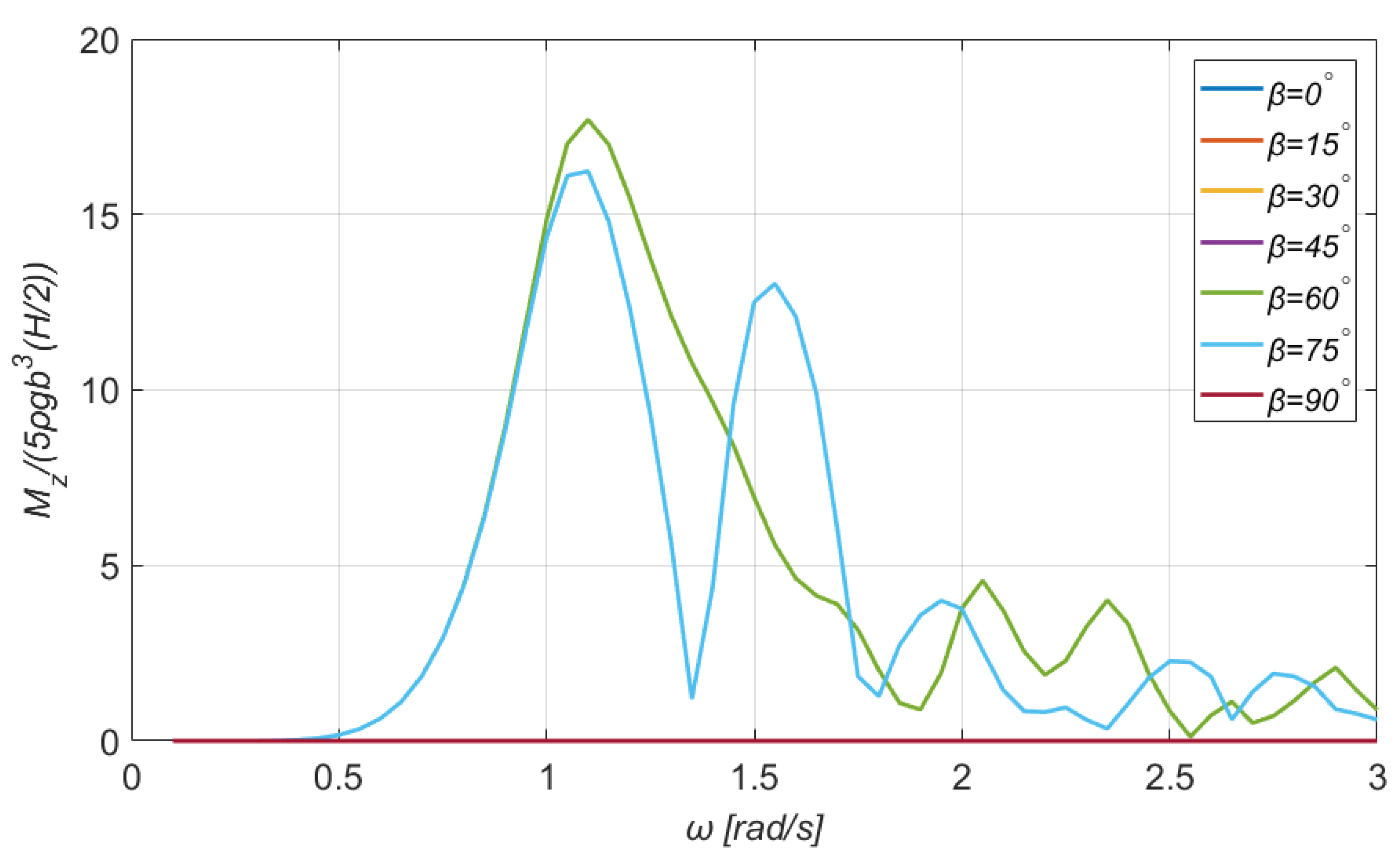
5.1. Exciting Forces and Moments
5.2. Added Masses, Hydrodynamic Damping, and Motions of the Floater
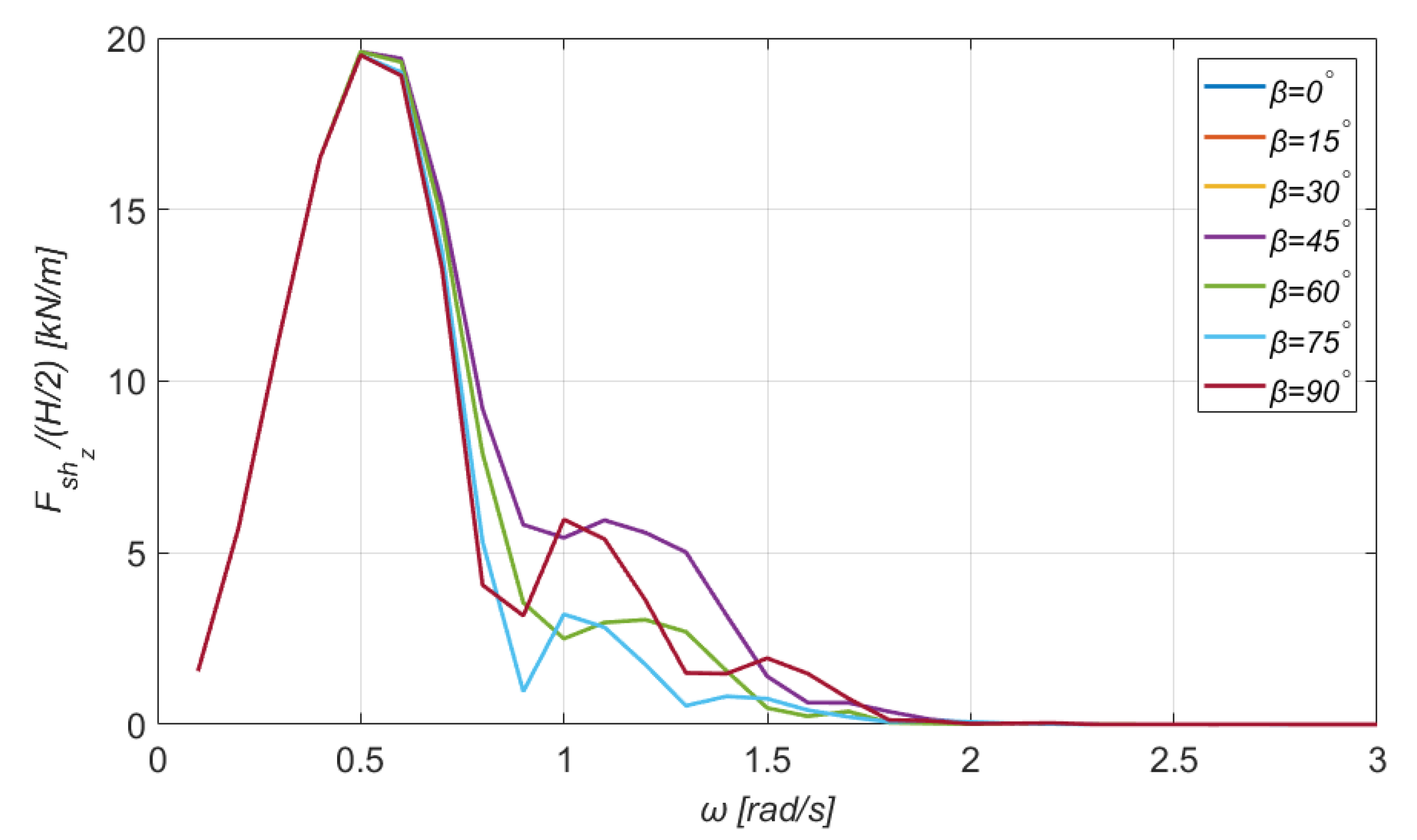
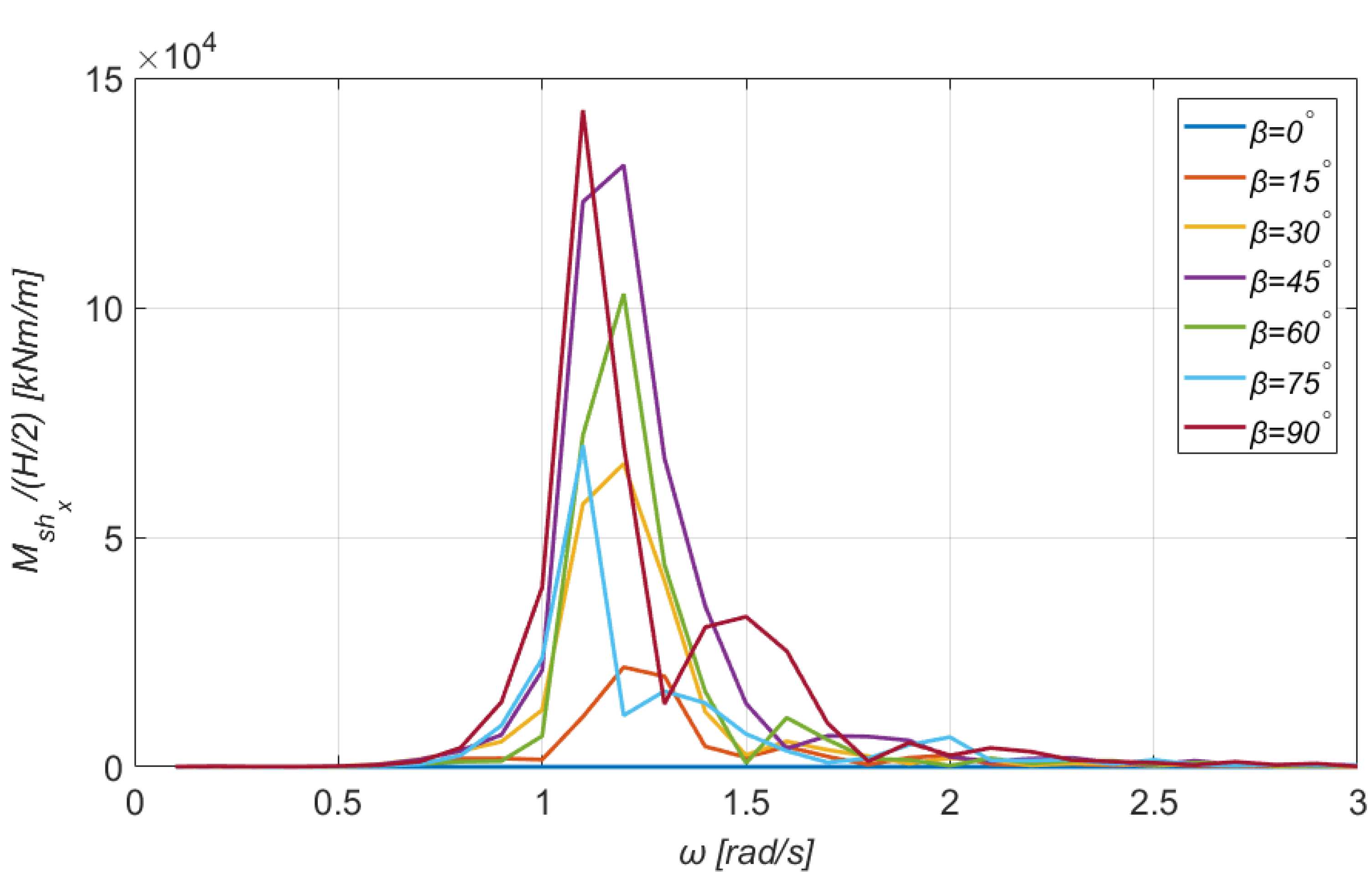
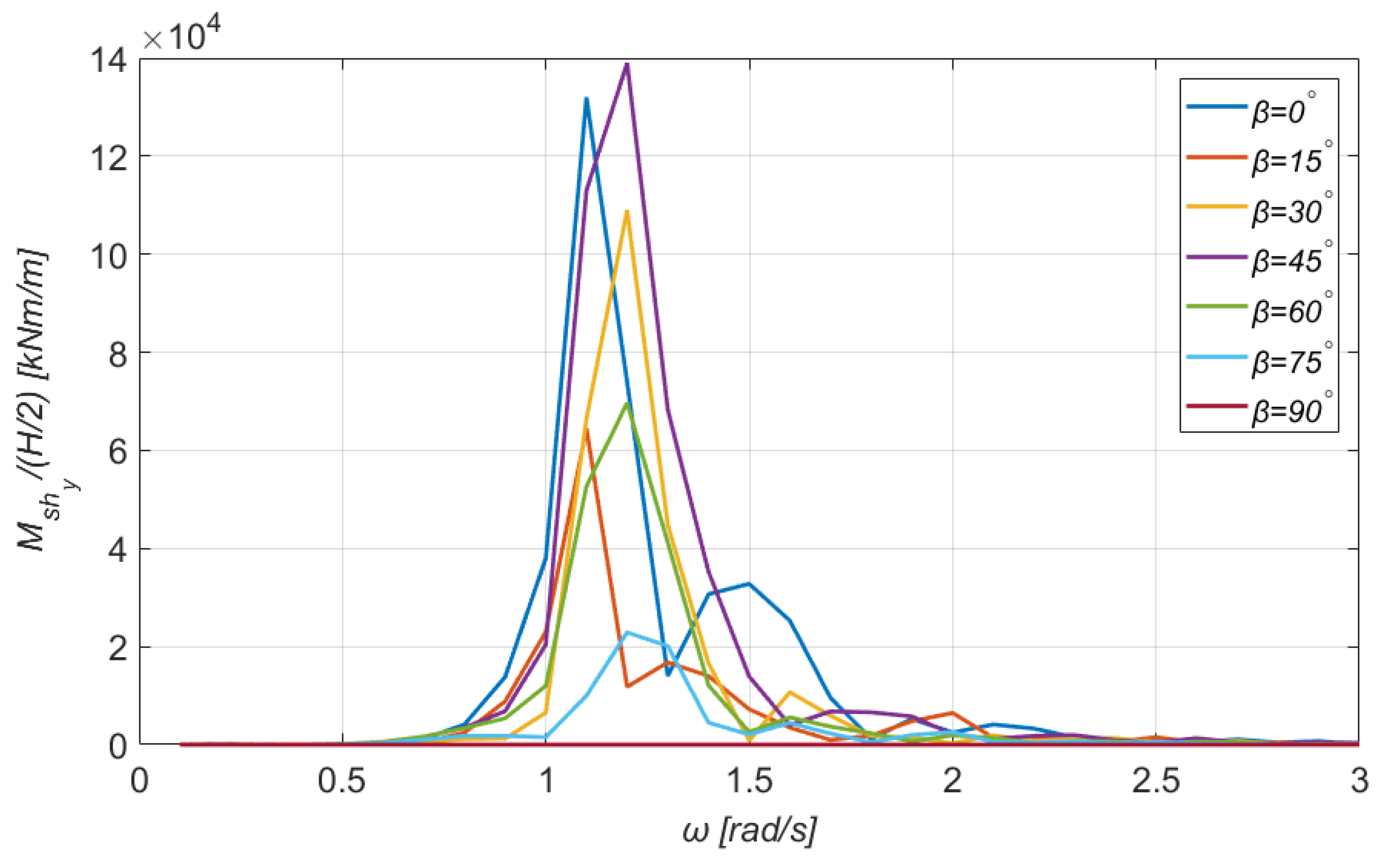
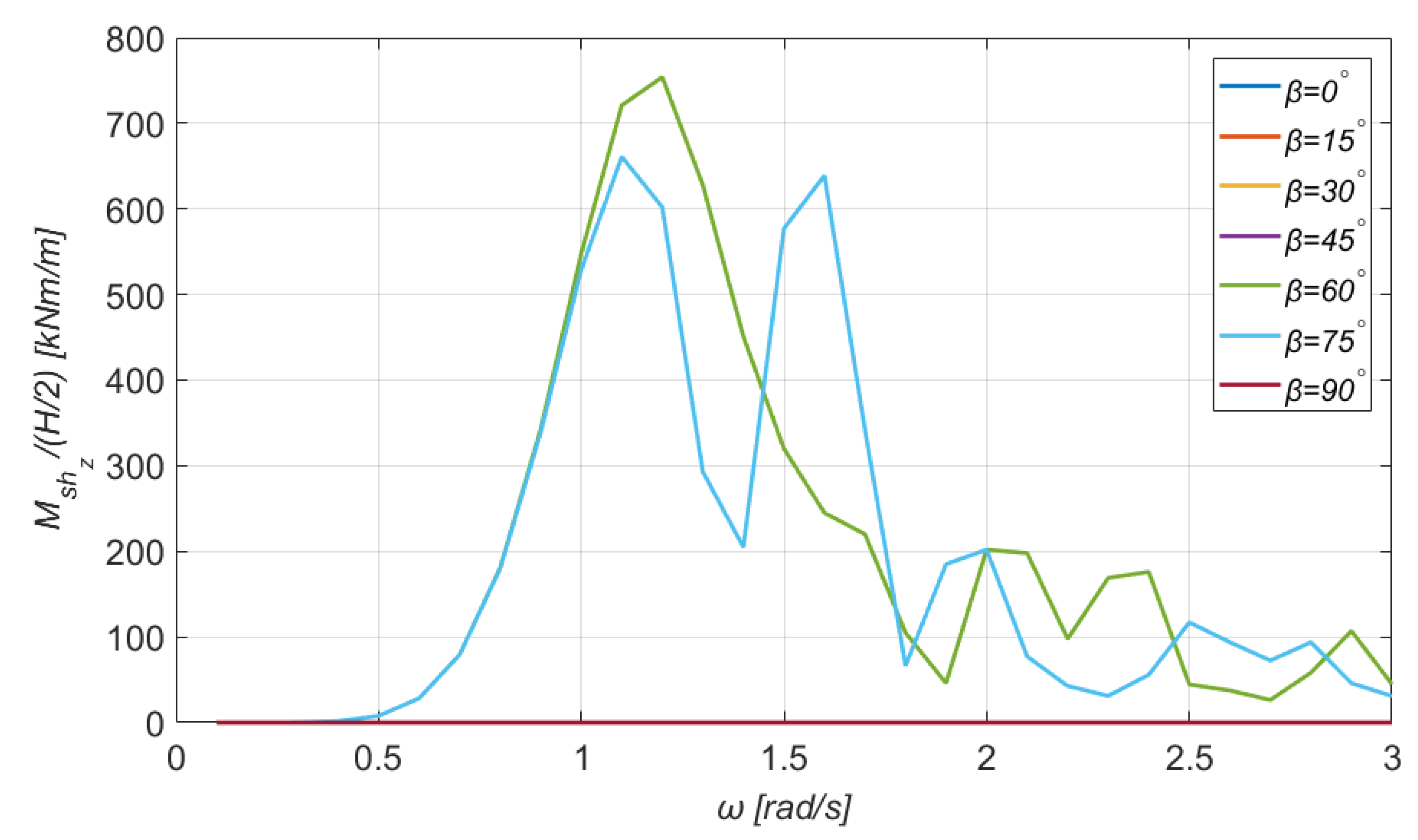
6. Shear Forces
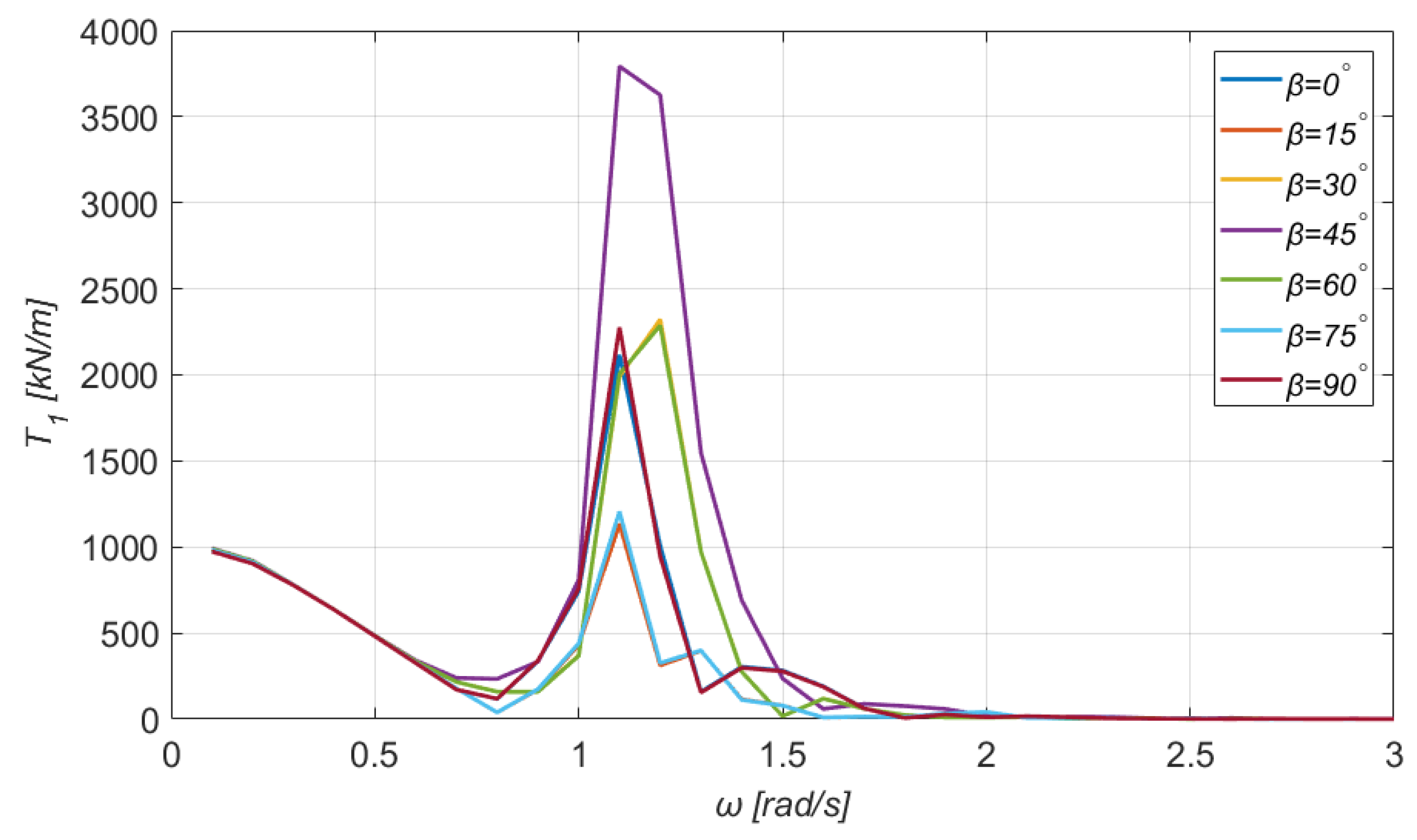
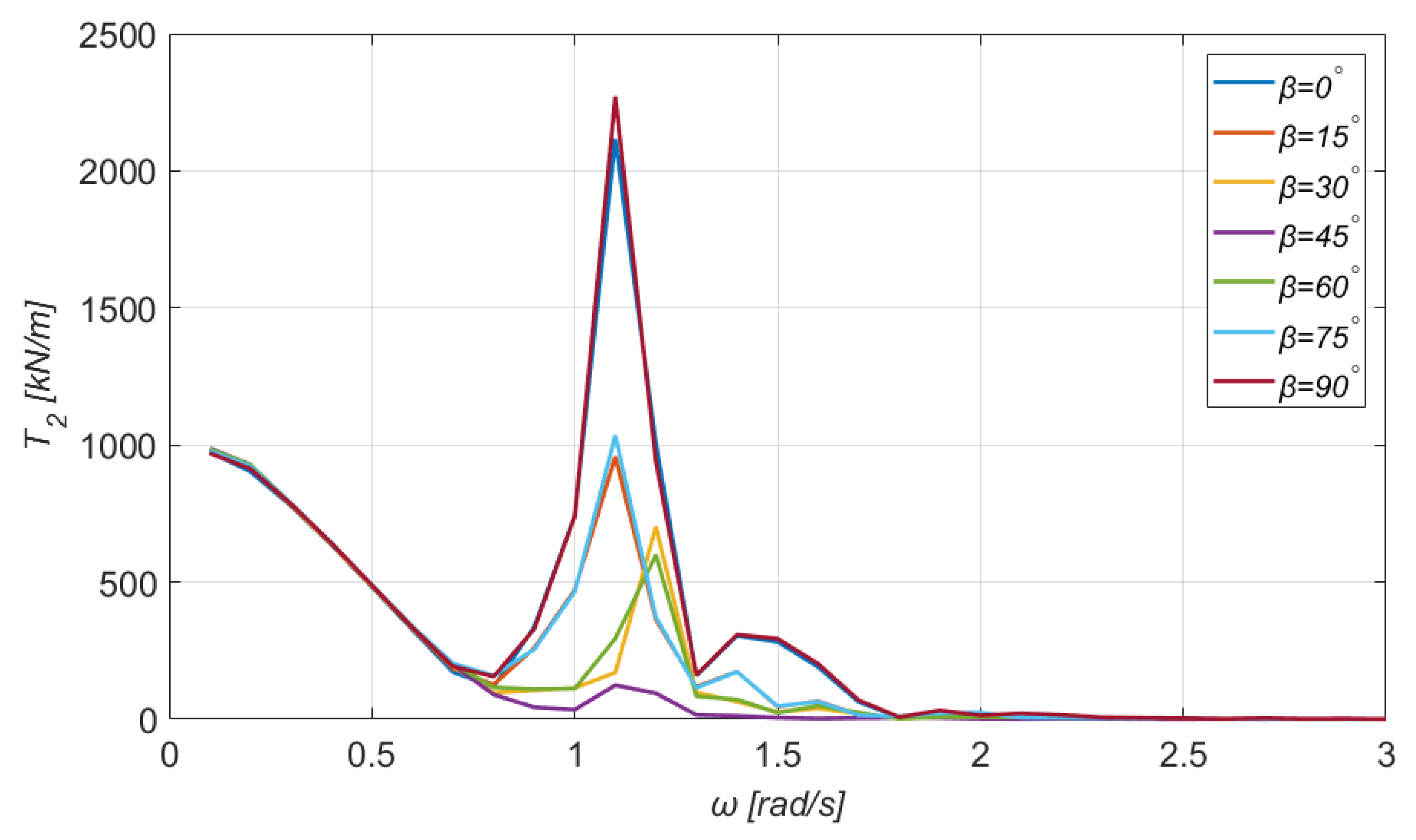
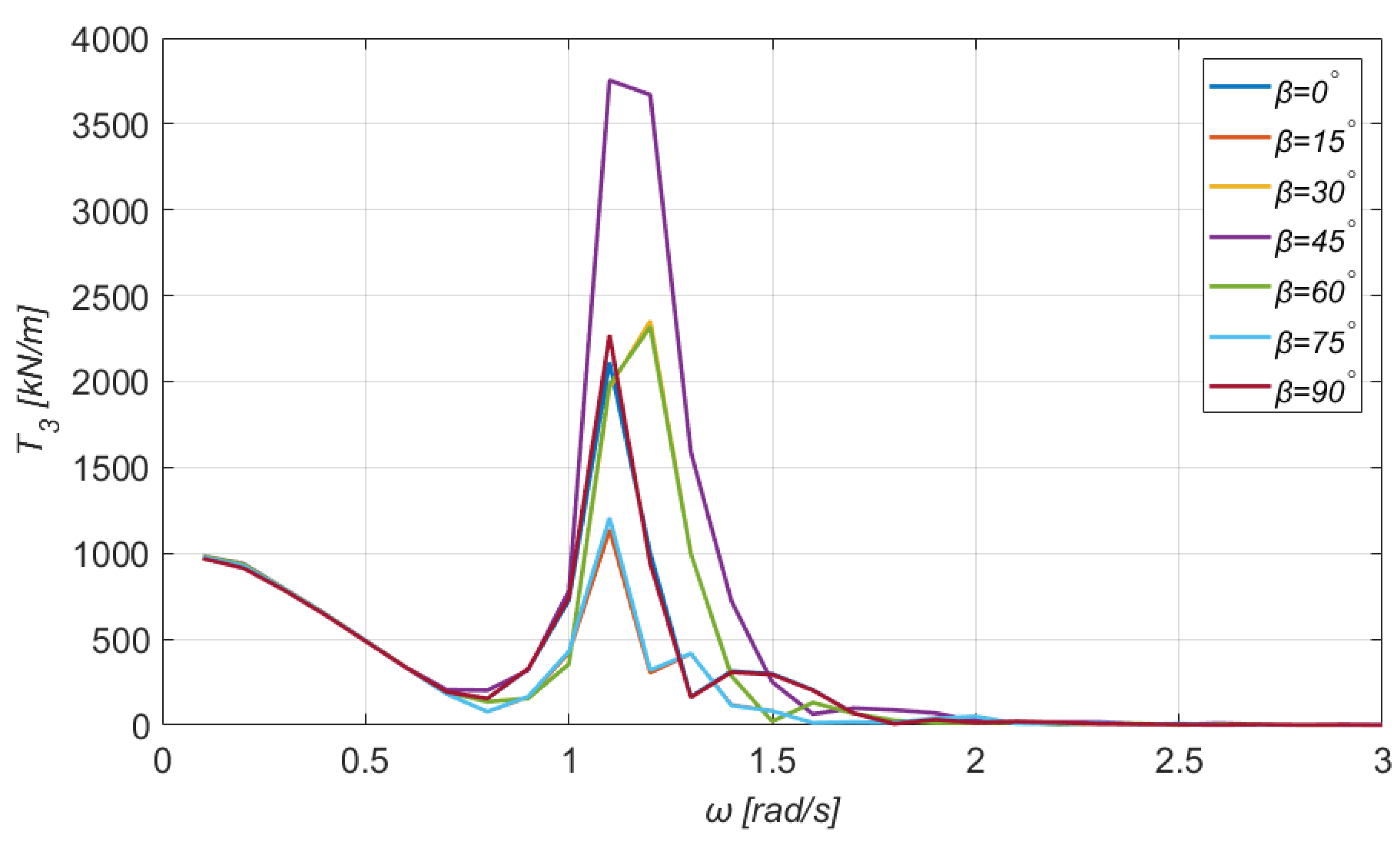
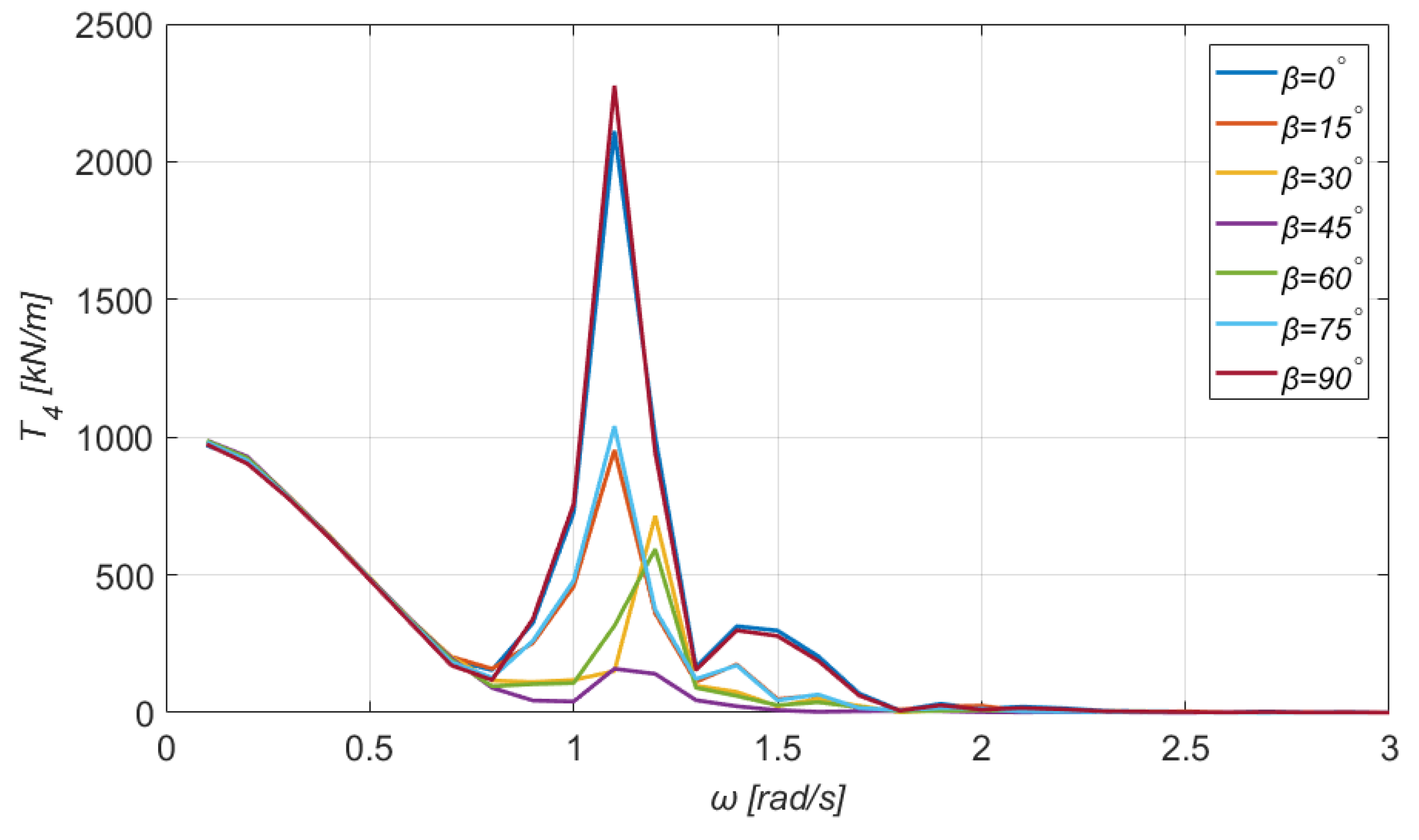
7. Calculation of the Total Mooring Tensions
8. Discussion and Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| TLP | Tension-leg platform |
| RAO | Response amplitude operator |
| WT | Wind turbine |
| OWC | Oscillating water column |
| DOF | Degrees of freedom |
| SWL | Still water level |
| CM | Center of mass |
| NUBO | Number of bodies |
References
- Tu, Y.; Cheng, Z.; Muskulus, M. A review of slamming load application to offshore wind turbines from an integrated perspective. Energy Procedia 2017, 137, 346–357. [Google Scholar] [CrossRef]
- Woo, C.; Chun, I.; Navaratnam, C.U.; Shim, J. Numerical analysis of dynamic response of jacket structures subject to slamming forces by breaking waves. Int. J. Nav. Arch. Ocean Eng. 2017, 9, 404–417. [Google Scholar] [CrossRef]
- Nielsen, F.G.; Hanson, T.D.; Skaare, B. Integrated dynamic analysis of floating offshore wind turbines. In Proceedings of the 25th International Conference on Offshore Mechanics and Arctic Engineering, Hamburg, Germany, 4–9 June 2006; OMAE2006-92291. ASME: New York, NY, USA, 2006; pp. 671–679. [Google Scholar]
- Skaare, B.; Hanson, T.D.; Nielsen, F.G.; Yttervik, R.; Hansen, A.M.; Thomsen, K.; Larsen, T.J. Integrated dynamic analysis of floating offshore wind turbines. In Proceedings of the European Wind Energy Conference and Exhibition (EWEC 2007), Milan, Italy, 7–10 May 2007; European Wind Energy Association: Brussels, Belgium, 2007. [Google Scholar]
- Utsunomiya, T.; Sato, T.; Matsukuma, H.; Yago, K. Experimental validation for motion of a spar-type floating offshore wind turbine using 1/22.5 scale model. In Proceedings of the 28th International Conference on Ocean, Offshore and Arctic Engineering, Honolulu, HI, USA, 31 May–5 June 2009; OMAE2009-79695. ASME: New York, NY, USA, 2009; pp. 951–959. [Google Scholar]
- Karimirad, M.; Moan, T. Extreme structural dynamic response of a spar type wind turbine. In Proceedings of the 29th International Conference on Ocean, Offshore and Arctic Engineering, Shanghai, China, 6–11 June 2010; OMAE2010-20044. ASME: New York, NY, USA, 2010; pp. 303–312. [Google Scholar]
- Mazarakos, T.P.; Mavrakos, S.A. Experimental investigation on mooring loads and motions of a Spar Buoy floating wind turbine. In Proceedings of the 3rd Offshore Energy and Storage Symposium (OSES 2016), Valletta, Malta, 13–15 July 2016. [Google Scholar]
- Mazarakos, T.P.; Mavrakos, S.A. Hydrodynamic loading of a Spar Buoy floating wind turbine in irregular waves. In Proceedings of the 12th Panhellenic Symposium of Oceanography and Fisheries, Corfu, Greece, 30 May–3 June 2018. [Google Scholar]
- Mazarakos, T.P.; Mavrakos, S.A.; Soukissian, T.H. Wave loading and wind energy of a Spar Buoy floating wind turbine. In Proceedings of the 14th International Conference on Ecological Vehicles and Renewable Energies (EVER 2019), Monte-Carlo, Monaco, 8–10 May 2019. [Google Scholar]
- Jonkman, J.M.; Buhl, M.L., Jr. Loads analysis of a floating offshore wind turbine using fully coupled simulation. In Proceedings of the WindPower Conference and Exhibition, Los Angeles, CA, USA, 3–6 June 2007. [Google Scholar]
- Wayman, E.N.; Sclavounos, P.D.; Butterfield, S.; Jonkman, J.M.; Musial, W. Coupled dynamic modeling of floating wind turbine systems. In Proceedings of the Offshore Technology Conference, Houston, TX, USA, 1–4 May 2006. [Google Scholar]
- Iijima, K.; Kim, J.; Fujikubo, M. Coupled aerodynamic and hydroelastic analysis of an offshore floating wind turbine system under wind and wave loads. In Proceedings of the 29th International Conference on Ocean, Offshore and Arctic Engineering, Shanghai, China, 6–11 June 2010; OMAE2010-20772. ASME: New York, NY, USA, 2010; pp. 241–248. [Google Scholar]
- Mazarakos, T.P.; Manolas, D.; Mavrakos, S.A. Design and Hydro-aero-elastic Modeling of a Multi Leg Mooring Concept for Floating Wind Turbine Applications. In Proceedings of the 16th International Conference on Ecological Vehicles and Renewable Energies (EVER 2021), Monte-Carlo, Monaco, 5–7 May 2021. [Google Scholar]
- Mazarakos, T.P.; Manolas, D.; Mavrakos, S.A. Design and hydro-aero-elastic modeling of a TLP concept for floating Wind Turbine applications. In Proceedings of the 31st International Ocean and Polar Engineering Conference (ISOPE 2021), Rhodes, Greece, 20–25 June 2021. [Google Scholar]
- Withee, J.E.; Sclavounos, P.D. Fully coupled dynamic analysis of a floating wind turbine system. In Proceedings of the 8th World Renewable Energy Congress, Denver, CO, USA, 28 August–3 September 2004. [Google Scholar]
- Weinzettel, J.; Reenas, M.; Solli, C.; Hertwich, E.G. Life cycle assessment of a floating offshore wind turbine. Renew. Energy 2009, 34, 742–747. [Google Scholar] [CrossRef]
- Bae, Y.H.; Kim, M.H.; Shin, Y.S. Rotor-floater-mooring coupled dynamic analysis of mini TLP-type offshore floating wind turbines. In Proceedings of the 29th International Conference on Ocean, Offshore and Arctic Engineering, Shanghai, China, 6–11 June 2010; OMAE2010-20555. ASME: New York, NY, USA, 2010; pp. 491–498. [Google Scholar]
- Mazarakos, T.P.; Manolas, D.; Grapsas, T.; Mavrakos, S.A.; Riziotis, V.; Voutsinas, S. Conceptual Design and advanced hydro-aero-elastic modelling of a TLP concept for Floating Wind Turbine applications. In Proceedings of the 1st International Conference on Renewable Energies Offshore (RENEW), Lisbon, Portugal, 24–26 November 2014. [Google Scholar]
- Mazarakos, T.P.; Konispoliatis, D.N.; Mavrakos, S.A. Design of a TLP floating structure concept for combined wind and wave energy exploitation. In Proceedings of the 2nd International Conference on Renewable Energies Offshore (RENEW), Lisbon, Portugal, 24–26 October 2016. [Google Scholar]
- Mazarakos, T.P.; Charalambous, M. Experimental investigation of the wave run up on a TLP floating wind turbine. In Proceedings of the 3rd International Conference Energy in Transportation, Athens, Greece, 3 November 2018. [Google Scholar]
- Mazarakos, T.P.; Mavrakos, S.A. Experimental Investigation on Mooring Loads and Motions of A TLP Floating Wind Turbine. in the Special Session on Offshore and Marine Renewable Energy: Conversion and Transmission. In Proceedings of the 12th International Conference on Ecological Vehicles and Renewable Energies (EVER 2017), Monte-Carlo, Monaco, 11–13 April 2017. [Google Scholar]
- Mazarakos, T.P.; Konispoliatis, D.N.; Manolas, D.I.; Mavrakos, S.A.; Voutsinas, S. Coupled hydro-aero-elastic analysis of a floating structure for offshore wind and wave energy sources exploitation. In Proceedings of the 12th International Conference on Stability of Ships and Ocean Vehicles (12th STAB), Glasgow, UK, 14–19 June 2015. [Google Scholar]
- Mazarakos, T.P.; Konispoliatis, D.N.; Manolas, D.I.; Voutsinas, S.G.; Mavrakos, S.A. Modelling of an Offshore Multi-Purpose Floating Structure Supporting a Wind Turbine Including Second-Order Wave Loads. In Proceedings of the 11th European Wave and Tidal Energy Conference (11th EWTEC), Nantes, France, 6–11 September 2015. [Google Scholar]
- Evans, D.V.; Porter, R. Efficient calculation of hydrodynamic properties of O.W.C. type devices. J. Offshore Mech. Arct. Eng. 1997, 119, 210–218. [Google Scholar] [CrossRef]
- Aubault, A.; Alves, M.; Sarmento, A.; Roddier, D.; Peiffer, A. Modeling of an oscillating water column on the floating foundation windfloat. In Proceedings of the 30th International Conference on Ocean, Offshore and Arctic Engineering, Rotterdam, The Netherlands, 19–24 June 2011; OMAE2011-49014. ASME: New York, NY, USA, 2011; pp. 235–246. [Google Scholar]
- Mazarakos, T.P.; Konispoliatis, D.; Katsaounis, G.; Polyzos, S.; Manolas, D.; Voutsinas, S.; Soukissian, T.; Mavrakos, S. Numerical and experimental studies of a multi-purpose floating TLP structure for combined wind and wave energy exploitation. Mediterr. Mar. Sci. 2019, 20, 745–763. [Google Scholar] [CrossRef] [Green Version]
- Shimada, K.; Ohyama, T.; Miyakawa, M.; Ishihara, T.; Phuc, P.V.; Sukegawa, H. A study on a semisubmersible floating offshore wind energy conversion system. In Proceedings of the 17th International Offshore and Polar Engineering Conference (ISOPE 2007), Lisbon, Portugal, 1–6 July 2007.
- Ishihara, T.; Phuc, P.V.; Sukegawa, H.; Shimada, K.; Ohyama, T. A study on the dynamic response of a semi-submersible floating offshore wind turbine system Part 1: A water tank test. In Proceedings of the 12th International Conference on Wind Engineering (ICWE 12), Cairns, Australia, 1–6 July 2007. [Google Scholar]
- Cermelli, C.; Roddier, D.; Aubault, A. WINDFLOAT: A floating foundation for offshore wind turbines Part II: Hydrodynamics analysis. In Proceedings of the 28th International Conference on Ocean, Offshore and Arctic Engineering, Honolulu, HI, USA, 31 May–5 June 2009; OMAE2009-79231. ASME: New York, NY, USA, 2009; pp. 135–143. [Google Scholar]
- Manolas, D.I.; Riziotis, V.A.; Voutsinas, S.G. Assessing the importance of geometric non-linear effects in the prediction of wind turbine blade loads. J. Comput. Nonlinear Dyn. 2015, 10, 041008. [Google Scholar]
- Mazarakos, T.P.; Konispoliatis, D.N.; Katsaounis, G.; Polyzos, S.; Manolas, D.; Voutsinas, S.; Mavrakos, S.A. Numerical and experimental studies of an offshore multi-purpose floating structure supporting a wind turbine. In Proceedings of the 12th European Wave and Tidal Energy Conference (12th EWTEC), Cork, Ireland, 27 August–1 September 2017. [Google Scholar]
- Tran, T.; Kim, D.; Song, J. Computational fluid dynamic analysis of a floating offshore wind turbine experiencing platform pitching motion. Energies 2014, 7, 5011–5026. [Google Scholar] [CrossRef]
- Tran, T.T.; Kim, D.-H. A CFD study into the influence of unsteady aerodynamic interference on wind turbine surge motion. Renew. Energy 2016, 90, 204–228. [Google Scholar] [CrossRef]
- Wang, X.; Ye, Z.; Kang, S.; Hu, H. Investigations on the unsteady aerodynamic characteristics of a horizontal-axis wind turbine during dynamic yaw process. Energies 2019, 12, 3124. [Google Scholar] [CrossRef] [Green Version]
- Chen, Z.; Wang, X.; Guo, Y.; Kang, S. Numerical analysis of unsteady aerodynamic performance of floating offshore wind turbine under platform surge and pitch motions. Renew. Energy 2021, 163, 1849–1870. [Google Scholar] [CrossRef]
- Mavrakos, S.A. User’s Manual for the Software HAMVAB; School of Naval Architecture and Marine Engineering, Laboratory for Floating Structures and Mooring Systems: Athens, Greece, 1996. [Google Scholar]
- Mavrakos, S.A. Hydrodynamic coefficients for groups of interacting vertical axisymmetric bodies. Ocean Eng. 1991, 18, 485–515. [Google Scholar] [CrossRef]
- Bak, C.; Zahle, F.; Bitsche, R.; Kim, T.; Yde, A.; Henriksen, L.C.; Natarajan, A.; Hansen, M.H. Description of the DTU 10 MW Reference Wind Turbine; In the Wind Energy Report-I-0092; DTU Wind Energy: Roskilde, Denmark, 2013. [Google Scholar]
- Newman, J. The exciting forces on fixed bodies in wave. J. Ship Res. 1962, 6, 10–17. [Google Scholar] [CrossRef]
- Mazarakos, T.P.; Konispoliatis, D.N.; Mavrakos, S.A. Loads on the brace system of an offshore floating structure. In Proceedings of the 13th International Marine Design Conference, Helsinki, Finland, 10–14 June 2018; Kujala, P., Lu, L., Eds.; Taylor & Francis Group: London, UK, 2018. [Google Scholar]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Element | Length (m) | Diameter (m) | Number of Elements |
|---|---|---|---|
| Main Column | 38.5 | 10 | 1 |
| Offset Buoy Columns | 38.5 | 10 | 4 |
| Horizontal Upper Tubes | 40 | 2 | 4 |
| Horizontal Lower Tubes | 40 | 2 | 4 |
| Inclined Upper Tubes | 25.355 | 2 | 4 |
| Inclined Lower Tubes | 25.355 | 2 | 4 |
| Cross Brace | 23.188 | 2 | 4 |
| Column Name | Abbreviation | Start Location (X,Y,Z) | End Location (X,Y,Z) | Length (m) |
|---|---|---|---|---|
| Main Column | MC | 0, 0, −20 | 0, 0, 18.5 | 38.5 |
| Offset Column 1 | OC1 | −25, −25, −20 | −25, −25, 18.5 | 38.5 |
| Offset Column 2 | OC2 | −25, 25, −20 | −25, 25, 18.5 | 38.5 |
| Offset Column 3 | OC3 | 25, 25, −20 | 25, 25, 18.5 | 38.5 |
| Offset Column 4 | OC4 | 25, −25, −20 | 25, −25, 18.5 | 38.5 |
| Horizontal Upper Tube 1 | HUP1 | −25, −20, 13.6 | −25, 20, 13.6 | 40.0 |
| Horizontal Upper Tube 2 | HUP2 | −20, 25, 13.6 | 20, 25, 13.6 | 40.0 |
| Horizontal Upper Tube 3 | HUP3 | 25, 20, 13.6 | 25, −20, 13.6 | 40.0 |
| Horizontal Upper Tube 4 | HUP4 | 20, −25, 13.6 | −20, −25, 13.6 | 40.0 |
| Horizontal Lower Tube 1 | HLP1 | −25, −20, −16.0 | −25, 20, −16.0 | 40.0 |
| Horizontal Lower Tube 2 | HLP2 | −20, 25, −16.0 | 20, 25, −16.0 | 40.0 |
| Horizontal Lower Tube 3 | HLP3 | 25, 20, −16.0 | 25, −20, −16.0 | 40.0 |
| Horizontal Lower Tube 4 | HLP4 | 20, −25, −16.0 | −20, −25, −16.0 | 40.0 |
| Inclined Upper Tube 1 | IUP1 | −21.464, −21.464, 13.6 | −3.565, −3.565, 13.6 | 25.355 |
| Inclined Upper Tube 2 | IUP2 | −21.464, 21.464, 13.6 | −3.565, 3.565, 13.6 | 25.355 |
| Inclined Upper Tube 3 | IUP3 | 21.464, 21.464, 13.6 | 3.565, 3.565, 13.6 | 25.355 |
| Inclined Upper Tube 4 | IUP4 | 21.464, −21.464, 13.6 | 3.565, −3.565, 13.6 | 25.355 |
| Inclined Lower Tube 1 | ILP1 | −21.464, −21.464, −16.0 | −3.565, −3.565, −16.0 | 25.355 |
| Inclined Lower Tube 2 | ILP2 | −21.464, 21.464, −16.0 | −3.565, 3.565, −16.0 | 25.355 |
| Inclined Lower Tube 3 | ILP3 | 21.464, 21.464, −16.0 | 3.565, 3.565, −16.0 | 25.355 |
| Inclined Lower Tube 4 | ILP4 | 21.464, −21.464, −16.0 | 3.565, −3.565, −16.0 | 25.355 |
| Cross Brace 1 | CB1 | −21.464, −21.464, 7.68 | −3.565, −3.565, −10.036 | 23.188 |
| Cross Brace 2 | CB2 | −21.464, 21.464, 7.68 | −3.565, 3.565, −10, 036 | 23.188 |
| Cross Brace 3 | CB3 | 21.464, 21.464, 7.68 | 3.565, 3.565, −10, 036 | 23.188 |
| Cross Brace 4 | CB4 | 21.464, −21.464, 7.68 | 3.565, −3.565, −10, 036 | 23.188 |
| Platform Mass Including Ballast (kg) | Draft (m) | Water Density (kg/m3) | CM Location below SWL Waterline (m) | Platform Roll Inertia about CM (kgm2) | Platform Pitch Inertia about CM (kgm2) | Platform Yaw Inertia about CM (kgm2) |
|---|---|---|---|---|---|---|
| Total Mass (kg) | Total Tower Height (m) | Tower Mass (kg) | Hub Mass (kg) | Nacelle Mass (kg) | Mass of the Blades (#3) (kg) | Length of the Blades (without the Hub) (m) |
|---|---|---|---|---|---|---|
| Number of Mooring Lines | Depth to Anchors below SWL (Water Depth) (m) | Depth to Fairleads below SWL (Water Depth) (m) | Mooring Line Length (m) | Mooring Line Diameter (mm) | Equivalent Mooring Line Mass Density (kg/m) | Submerged Weight Per Unit Length (N/m) | Mooring Line Stiffness Cxx of Each Tendon (kN/m) | Mooring Line Stiffness Czz of Each Tendon (kN/m) | Total Pretension (kN) |
|---|---|---|---|---|---|---|---|---|---|
| 4 | 200 | 20 | 180 | 239 | 136.10 | 895.00 | 53.83 | 2067 | 9690 |
| Tendon (#) | Upper Attachment Point | Lower Attachment Point |
|---|---|---|
| 1 | (−25, −25, −20) | (−25, −25, −200) |
| 2 | (−25, 25, −20) | (−25, 25, −200) |
| 3 | (25, 25, −20) | (25, 25, −200) |
| 4 | (25, −25, −20) | (25, −25, −200) |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mazarakos, T.P.; Tsaousis, T.D.; Mavrakos, S.A.; Chatjigeorgiou, I.K. Analytical Investigation of Tension Loads Acting on a TLP Floating Wind Turbine. J. Mar. Sci. Eng. 2022, 10, 318. https://doi.org/10.3390/jmse10030318
Mazarakos TP, Tsaousis TD, Mavrakos SA, Chatjigeorgiou IK. Analytical Investigation of Tension Loads Acting on a TLP Floating Wind Turbine. Journal of Marine Science and Engineering. 2022; 10(3):318. https://doi.org/10.3390/jmse10030318
Chicago/Turabian StyleMazarakos, Thomas P., Theodosis D. Tsaousis, Spyros A. Mavrakos, and Ioannis K. Chatjigeorgiou. 2022. "Analytical Investigation of Tension Loads Acting on a TLP Floating Wind Turbine" Journal of Marine Science and Engineering 10, no. 3: 318. https://doi.org/10.3390/jmse10030318
APA StyleMazarakos, T. P., Tsaousis, T. D., Mavrakos, S. A., & Chatjigeorgiou, I. K. (2022). Analytical Investigation of Tension Loads Acting on a TLP Floating Wind Turbine. Journal of Marine Science and Engineering, 10(3), 318. https://doi.org/10.3390/jmse10030318