Abstract
Maritime Autonomous Surface Ships (MASS) have been an important direction for the development of intelligent shipping. However, most current international research on MASS focuses on navigation assistance technologies such as perception and decision-making, ignoring MASS’s traffic organization and management. The traffic organization service (TOS) under the e-Navigation strategy also has not researched MASS. In this paper, we propose the notion of on-demand service to MASS with different degrees of autonomy (DoA) and develop a new maritime service (MS) applicable to the MASS with various (DoA) following the e-Navigation technical architecture. We first analyze MASS requirements with different degrees of autonomy in traffic organization to define the service information. Then, based on the traditional TOS, we developed the MASS traffic organization service (MTOS), consisting of an operational architecture, five subsystems, and four services. In particular, we proposed a phased service trigger mechanism to solve the problem of publishing untimely and redundant service information. Tianjin port and Huanghua port were selected as cases study for simulation experiments; the study finding revealed that MTOS could provide standardized, accurate, and efficient traffic organization service for MASS with different degrees of autonomy on demand. The contribution can be applied in the port operation to improve traffic safety.
1. Introduction
With the continuous large-scale, high-speed, and professional development of waterway transport ships, the shortage of seafarers, increased maritime traffic risks, and other problems have become prominent, making the existing maritime traffic system face tremendous pressure. As an important means to ensure the safety of maritime traffic, improve the intelligence of waterway transportation and strengthen the protection of the marine environment, autonomous ships have become a core issue of concern in the field of maritime traffic engineering and a significant trend in the development of high-tech ships in the future. In 2018, the International Maritime Organization (IMO) proposed the concept of MASS at the 100th Maritime Safety Committee meeting. For the purpose of the regulatory scoping exercise, IMO classify MASS into four degrees of autonomy [1]:
- Degree one: Ship with automated processes and decision support;
- Degree two: Remotely controlled ship with seafarers on board;
- Degree three: Remotely controlled ship without seafarers on board; and
- Degree four: Fully autonomous ship.
At the moment, vessel traffic service (VTS) provides traffic services to ships within areas mostly through voice interaction between operators and seafarers. With the growth of maritime trade and the benefits of MASS in terms of energy conservation and emission reduction, labor cost reduction, and safety, dense MASS with different degrees of autonomy will be required to pass through the channel quickly and systematically in the future. It will increase the working pressure of VTS operators, easily lead to ship congestion in port waters, and increase the incidence of traffic accidents in port areas. TOS under the e-Navigation strategy is committed to providing data in a digital format to support traffic organization. However, such kinds of maritime services’ information and mode are formulated according to the features of manned vessels, which are incapable of solving the traffic organization problem of MASS with different degrees of autonomy. Considering the description in Figure 1, to better organize vessels traffic in VTS areas, the VTS not only needs to provide information for manned vessels but also to provide traffic organization information for MASS and shore control center (SCC), it appears with the second degrees of autonomy MASS [2], according to the characteristics of MASS with different degrees of autonomy. Therefore, how to determine the traffic organization information requirements of various degrees of MASS and how to deliver accurate and timely services for MASS based on those requirements are essential to accomplish a safe and efficient MASS traffic organization.
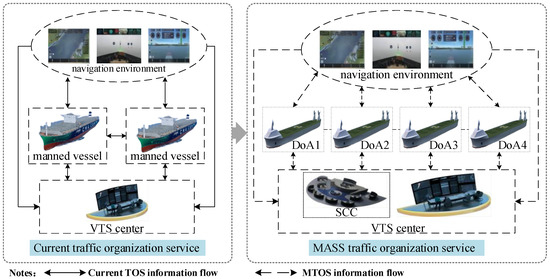
Figure 1.
An illustration of our motivation. Based on the traditional TOS under the e-Navigation strategy, we develop an MS with unified standards and an efficient structure to provide a safe and efficient MASS traffic organization service.
To advocate research in this direction, in the work of Jia [3], researched the potential impact of MASS on TOS by using gap analysis to assess the difference between current TOS and the future. Factors identified in the analysis of autonomous shipping by the Istanbul Technical University were used as guides to identify potential gaps. Existing works [4,5] revealed the demand for the MASS traffic organization based on the Strengths, Weaknesses, Opportunities, and Threats-Analytic Hierarchy Process (SWOT-AHP) approach, which through quantitative analysis shows that seaport MASS traffic organization service has the most urgent needs in terms of service scope, service process, and emergency response. Although these works investigated the impacts of MASS on current TOS and analyzed the demand for MASS in seaport traffic organization, they were only conducted from the perspective of the absence of seafarers on a vessel, and the demand in traffic organization was not determined based on the characteristics of MASS with different degrees of autonomy. More significantly, at this moment, the IMO has not developed a maritime service applicable to MASS with different degrees of autonomy.
In this work, we identified the information requirements of MASS with different degrees of autonomy in the traffic organization by reviewing their features in the traffic organization’s service process, service scope, and emergency response. Then, based on the e-Navigation technical architecture, we present a new MS that applies to each autonomy degree of MASS, consisting of a service operational architecture, multiple subsystems, service specifications, and data collection methods. The primary goal is to propose a reusable application model for MASS traffic organization in e-Navigation to compensate for the existing TOS not contemplating delivering MASS service. Additionally, realizing safe and efficient traffic organization of MASS with different degrees of autonomy in the VTS area. In addition, we propose a phased service trigger mechanism based on the vessel’s arrival and departure process to avoid service delay and information redundancy.
The main contributions of this paper are summarized as follows:
- We propose a notion of on-demand service for MASS with different DoA. We determine the traffic organization service information needs of MASS based on IMO’s description of MASS at each autonomous degree (including autonomous characteristics, whether shore-based assistance is required, and whether seafarers are on board) and analysis of the characteristics of MASS’s traffic organization service in the service process, service scope, and emergency response.
- We develop a new MS for MASS. It fills the gap that the traditional TOS of e-Navigation does not consider when providing services for MASS and gives a solution for VTS operators to provide traffic organization service for MASS.
- We demonstrate the good interpretability of our approach and provide a case study with deep insights. Our solution can provide traffic organization service for MASS according to its inbound and outbound processes and solve the problems of service delay and information redundancy.
2. Literature Review
The conventional manned vessel traffic organization issue has been widely investigated in the literature and policy [6,7,8]. In contrast, research into MASS’s traffic organization is in its infancy. The work of Baldauf et al. [9], investigated various equipment choices for monitoring and remote control of unmanned ships in coastal areas served by ship traffic services by planning, designing, and carrying out simulation testing. The work of Baldauf et al. [10], developed simulated studies to evaluate various methods and qualified remote operators in the VTS control region, which coexists with manned and unmanned ships. According to the assessment of the influence of autonomous surface ships on VTS, when mixed traffic scenarios are at sea, VTS will permit more data sharing and interaction rather than only sending safety information [11]. The work of Zheng et al. [12], examined the nautical support services necessary for each level of MASS sailing based on the IMO’s classification of MASS. Although the above works preliminarily explored the impact of MASS on VTS work, their research has not yet involved the safety and social impact of MASS, which is more concerning.
The work of Relling et al. [13], explored if the future VTS can facilitate safe coexistence between automated and conventional vessels. The study concludes that VTS could significantly contribute to a safe coexistence between automated vessels by regulating and organizing traffic. The work of Relling et al. [14], proposed a democratic process involving people from the entire VTS organization with a variety of competencies is necessary to find solutions and to warrant ownership in the design phase. Kim et al. [15], explored the potential safety challenges related to autonomous ship operations in a mixed navigational environment. They discussed possible ways to reduce the same issues related to the identified safety risks. The work of Fan et al. [16], proposed a framework for identifying factors that influence the navigational risk of remotely controlled MASS without crews on board. In this work, 23 human-related factors, 12 ship-related factors, 8 environment-related factors, and 12 technology-related factors were defined. To ensure the safe coexistence of traditional ships and autonomous ships in the Strait of Gibraltar, a new maritime communication system was established [17]. Ref. [18] performed a literature review of the operational features of remotely-controlled merchant vessels, the results indicate that most scholars focus on the high-end components of the system, while some organizational and human-oriented issues remain under-explored. These above-mentioned studies discussed the influence of MASS on the working mode of VTS in the future from the perspective of safety. It can be seen that VTS’s reasonable and efficient management and organization of traffic are crucial to the navigation safety of MASS. However, how to achieve the reasonable and efficient management and organization of MASS by VTS is still rarely studied.
In the work of Bogusławski et al. [19], the present study investigates the worldwide research effort focusing on situational awareness for autonomous transport and explores how the maritime domain could benefit from it. It was found that the cooperation links between institutions and countries active in maritime-related, human-oriented research are rather weak. The work of Bogusławski et al. [20], explored the impact of autonomous shipping on maritime education and training from the perspective of cadets. The results indicate that cadets fear being pushed out of the job market more than professionals do. However, they expect that their learned skills will help them find a job in a different branch of the maritime industry [20]. The above research reflects the concern of offshore practitioners and cadets that MASS will cause them to lose their normal job opportunities in the future.
Therefore, realizing the reasonable and efficient TOS of VTS to MASS is crucial to the navigation safety of MASS and has a positive impact on providing more opportunities for offshore practitioners and cadets to work onshore in the future.
To effectively carry out the reasonable and efficient TOS to MASS, this paper attempts to establish a new MS based on the e-Navigation strategy, which is the MTOS. MTOS is a maritime service designed for MASS with different degrees of autonomy according to the e-Navigation strategy. The purpose is to prevent the development of dangerous marine traffic situations and to provide for the safety and efficient movement of MASS traffic within the VTS area. International research on MS has made some achievements in the theory and engineering practice. In terms of theoretical investigation, ref. [21] developed a database for the fusion, display, and transmission of maritime safety information, and stated that the next study will strengthen the database for MS requirements. The work of Hu et al. [22], examined the current state of e-navigation implementation in China and made some recommendations for the advancement of e-Navigation research in China as well as the principles that should be followed in the establishment of MS. The work of Shin et al. [23], created a three-dimensional navigation simulation environment to test MS effectiveness and prepare for the IMO standard MS test. Through the analysis of the application of S-100 in e-Navigation, ref. [24] put forward the suggestion that China should build e-navigation that meets the S-100 standard. As the solution for the e-navigation application system, MS should also follow the requirements of the S-100 standard for the information and data it processes. Recently, under the e-navigation strategy, ref. [6] developed the vessel intelligent transportation Maritime Service in port areas and preliminarily realized the intelligent transportation organization of manned ships entering and leaving the port. In terms of engineering practice, the European Union, Japan, China, and other shipping-developed regions have taken the lead in research, establishing e-Navigation demonstration projects such as [25,26,27,28,29,30,31]. These projects mainly meet the demand for MS for vessels sailing in the ocean or strait regions, such as electronic navigation, route planning, meteorological services, dynamic risk prediction, etc. Relevant scholars [6,21,22,23,24] and demonstration projects [25,26,27,28,29,30,31] have conducted preliminary analysis and research on the overall architecture, service requirements, and data modeling of MS, but the majority of them are relatively decentralized local research, lacking systematic analysis and study on MS. There are few reports on the classification, definition, and description of its specific service information, as well as a lack of research on developing a scientific, quantitative, and standard data structure of ship transportation MS. Furthermore, there is so far no relevant structure that has been established in the current strategy of e-Navigation to deal with the changes brought by MASS to TOS. What is more, with the growth of maritime trade and the benefits of MASS in terms of energy conservation and emission reduction, labor cost reduction, and safety, dense MASS with different degrees of autonomy will be required to pass through the channel quickly and in an orderly way in the future [17].
As a result, in response to the current research gap of ambiguous information on unmanned vessel traffic organization services and the lack of maritime services applicable to MASS of different degrees of autonomy under e-Navigation, we put forward the notion of on-demand services and, on this basis, innovatively established maritime services applicable to MASS of each autonomy level to realize standardized and unified on-demand services for MASS.
3. Determine MTOS Information by the Demands of MASS
This section determines the information requirements of the MASS through a detailed analysis of the characteristics of the MASS on the traffic organization’s process, scope, and emergency response.
3.1. Analyze the Characteristics of MTOS
The process of MTOS. When a vessel departs from its port of sailing, it transmits an estimated arrival report to the port of destination during its sea navigation. When the vessel sails to the VTS reporting line at the destination port, it will send the arrival report to VTS, and VTS will prepare the arrival plan of the vessel in advance according to the vessel arrival plan, the distribution of the anchorage outside the port, the distribution of the berths in the port basin and the operation information of the vessels inside and outside the port (e.g., pilotage information, tugboat information, terminal operation information) [32]. After that, the vessel can arrive at the corresponding berth via the channel to enter the port. After the vessel arrives at the berth, it can complete the berthing, mooring, and handling of relevant documents under the guidance of relevant operators and start loading and unloading the vessel. After completing the loading and unloading operation, the vessel shall submit the departure application to VTS. VTS shall issue the departure instruction to the departing vessel at an appropriate time. After that, the departing vessel can complete the document processing, untwisting, unberthing, and other operations and leave the port via the channel [33]. At this time, the process of arriving and departing the vessel was completed. The process of vessel organization and scheduling is shown in Figure 2.
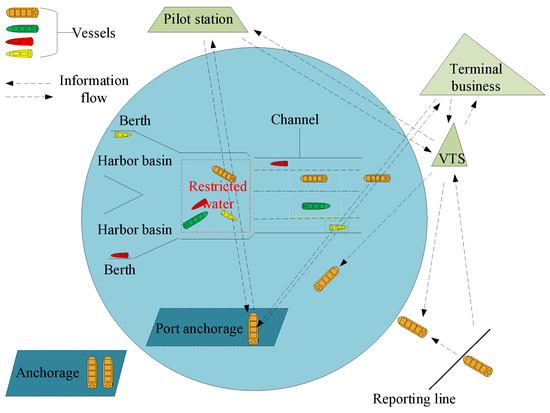
Figure 2.
The process of organization and scheduling of vessels.
With the continued growth of maritime trade and the commercial operation of MASS, the volume of mixed traffic in the VTS areas will significantly increase in the future. In addition, for all degrees of MASS and manned vessels, the tonnage and demand for entering and departing the port will be more diversified. This will make it more difficult for VTS operators to manually create scheduling plans that are safe, efficient, and environmentally beneficial. Additionally, MASS with degrees I and II autonomy have seafarers on board, when the vessels enter or depart the port, pilots can command from on board. However, MASS with degrees III and IV autonomy have no seafarers on board, and the pilots are unable to be on board to guide the ships to enter or depart the port. This necessitates adjustments to the vessels’ scheduling processes at VTS.
The scope of MTOS. Following the commercial operation of MASS, the mixed traffic scenarios involving manned ships and MASS in the VTS area are inevitable. According to current vessel management regulations, when MASS navigates in the VTS area, the VTS is required to give safety information to ensure safe and efficient navigation. Specifically, the SCC also should be included in the scope of management and service [2]. Thus, the marine information flow within the VTS area is dominated by VTS-vessels and vessel-vessels protocols. The advent of MASS will boost the information flow of VTS-SCC, VTS-MASS, MASS-MASS, and SCC-MASS within the area, as shown in Figure 3. According to VTS management requirements, vessels arriving or attempting to enter the port have to report to VTS and collect traffic information for the channel environment. Due to the fact that there are seafarers onboard, the degrees I and II MASS can continue to report the ships’ demand to VTS by Very High Frequency (VHF). Since there are no seafarers in the degrees III and IV MASS, the information transmission between MASS and VTS will be replaced by a digital form. Therefore, it is revealed that VTS will most likely need to increase the buffer to sort out maritime traffic information and process the information of the degree III and IV MASS in advance. As a result, the scope of the service will expand.
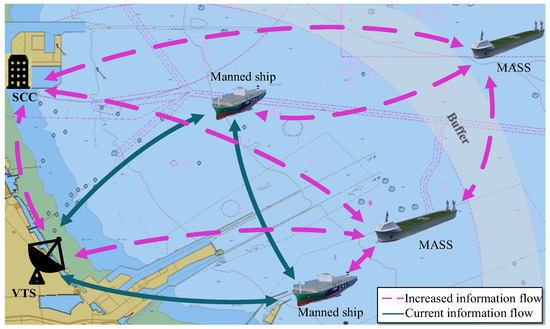
Figure 3.
Future information flow in the VTS areas [5].
The emergency response of MTOS. VTS responds to marine emergencies by enhancing information transmission between vessels and emergency response agencies. In the event of an emergency, the seafarers will contact VTS and describe the vessel’s and surrounding areas’ status, as well as request any vital assistance [34]. This information will be relayed immediately to the shore-side emergency response agency, which will make the required arrangements. Additionally, VTS will broadcast the distress situation to surrounding vessels based on the severity of the occurrence, allowing surrounding vessels to provide immediate assistance to the vessel in distress [35]. This effective interaction between VTS and seafarers expedites emergency response and optimizes resource utilization. However, the absence of seafarers on degrees III and IV MASS presents an important challenge for VTS in collecting information, assessing the situation, and deciding what type of assistance to be provided or received. According to a study on the possible influence of unmanned vessels on maritime transportation safety, the repercussions of non-navigational incidents such as vessel losses due to fire or structural failure will be significantly greater than those of navigational ones [36]. This is because there is a lack of seafarers to assess and control the damage. Failure to maintain communication will result in an erroneous assessment of the situation. Additionally, in an emergency, SCC operators have difficulty remotely perceiving the vessel’s situation and hence cannot provide proper assistance. In an emergency, when SCC lacks vision and data on the damage state, VTS operators must rely on surrounding vessels or other technical equipment, such as an unmanned aerial vehicle, to provide information on the extent of the damage and then allow the rational coordination of emergency response with the appropriate joint services [37]. In addition, when the navigation is obstructed by restricted visibility or fog, the seafarers can judge the manned vessels and degrees I and II MASS. However, the degrees III and IV MASS cannot carry out an effective lookout through the seafarers. Therefore, VTS should regularly broadcast boisterous weather, navigation warning, route warning, and other early warning information to the navigation MASS, and take the initiative to provide accurate, efficient, and personalized early warning services for the degrees III and IV MASS. For example, navigation aids are important for MASS to enter or depart the port. On degrees I and II MASS, seafarers can identify the navigation aids and implement effective manual manipulation and intervention in the process of entering or departing the port. For the degrees III and IV MASS, navigation aids must be able to be identified effectively during the day, night, and under a variety of meteorological conditions such as dense fog, heavy rain, and other restricted visibility, which requires VTS to actively broadcast the location, type, and other information about navigation aids regularly. Another essence of VTS is to ensure a safe route for vessel navigation throughout an emergency. As a result, MASS should not only consider their safety but also the safety of other vessels and the environment. In case of an emergency, VTS operators shall be able to guide and control the MASS to reach safe areas and broadcast information on alternate routes for all the vessels in the area.
3.2. Determine the Information on MTOS
The degree I MASS. In comparison to manned vessels, the primary characteristic of the degree I MASS is that some operations are automated. While it is obvious that its demand for traffic organization is virtually identical to that of manned vessels, it is required to define the degrees of autonomy. As a result, the degree I MASS service information includes ship type information in addition to the manned ships’ service information [6].
The degree II MASS. The degree II MASS are remotely controlled ships with seafarers on board, but the most characteristic of them is controlled and operated from another location. Therefore, the service information of the degree II MASS is to add remote control information and communication protocol information based on the degree I MASS, to help remote operators better control the safe navigation of the degree II MASS in the VTS areas.
The degree III MASS. The degree III MASS are also controlled and operated from another location, but there are no seafarers on board. This has resulted in subversive changes to the way information is exchanged. To assist shore-side operators in understanding the ship, its surrounding ships, and the environment in real-time, information services such as remote monitoring information and ship status information are provided to the degree III MASS based on the degree II MASS information services. To accomplish the goal of efficiently entering or departing the port without seafarers, the vessel’s schedule information must also include the buffer range and report line position. Due to the fact that the pilot is unable to board the degree III MASS, it needs remote pilotage information. Since anchor balls and other shapes cannot be hung when there are no seafarers on the ship, it is not necessary to provide shape information for the degree III MASS.
The degree IV MASS. The degree IV MASS are fully autonomous ships. The operating system is solely responsible for the ships’ actions. There is no control center on land and there are no seafarers on board. To overcome the challenges of the degree IV MASS perception of navigation aids and the surrounding environment in restricted visibility, the service information must not only include all service information for the degree III MASS, but also broadcast service information such as the status of navigation aids, sea conditions, and the surrounding setting to the degree IV MASS. More subtypes were identified to improve the service’s accuracy and pertinency for each degree of MASS, as shown in Table 1.

Table 1.
Mass traffic organization information requirements at all degrees.
4. E-Navigation MTOS Construction
In this section, we develop MTOS based on the concept and technology of establishing maritime services proposed by the e-Navigation strategy.
4.1. MTOS Function Description
The purpose of MTOS is to prevent the development of dangerous maritime traffic situations and to provide for the safety and efficient movement of MASS traffic within the VTS area. The MTOS concerns the operational management of traffic and the forward planning of MASS movements to prevent congestion and dangerous situations and is particularly relevant in times of high traffic density or when the movement of special transport may affect the flow of other traffic. The service may also include establishing and operating a system of traffic clearances or VTS sailing plans or both at a priority of movements; allocation of space; mandatory reporting of movements in the VTS area; routes to be followed; speed limits to be observed; or other appropriate measures which are considered necessary by the VTS authority. In this section, we develop MTOS based on the concept and technology of establishing maritime services proposed by the e-Navigation strategy.
4.2. MTOS Operational Architecture
We first designed an operational architecture for maritime MTOS. The architecture consists of five layers: maritime data processing and maintenance layer, maritime service layer, terminal system layer, communication networks layer, and maritime data collection layer, as shown in Figure 4.
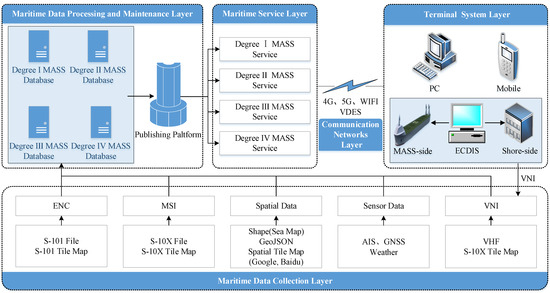
Figure 4.
MTOS operational architecture.
The maritime data processing and maintenance layer is the core of MTOS. It can provide users with traffic organization information on demand by processing the collected data. This platform contains four databases, which store the service information of the first to fourth degrees of MASS respectively. The maritime service layer includes four degrees (see Section 3.2). These services cover most of the information vessels may need during ingoing and outcoming, when the MASS is at degree one, MTOS will provide it with the degree one service information. If it is at degree four, MTOS will offer it with degree four service information. The terminal systems layer is composed of the Electronic Chart Display and Information System (ECDIS), mobile, and personal computer (PC) devices. ECDIS can request and subscribe to the service from a shore-based platform through communication networks (4G, 5G, WIFI, VDES) and display the service information in a single window. The mobile device has the basic functions of ECDIS and can use its positioning and navigation module to navigate autonomously. PC devices provide users with the ability to simulate the MTOS and monitor interesting ships in real time using WebGIS technology [38]. The maritime data collection layer is used to gather the necessary data and generate MASS traffic organization services. The collection methods include long-term observation, sensor acquisition, third-party APIs (e.g., meteorological bureau and port authority APIs), AIS stations, volunteer navigation information (VNI), and notices to mariners (NMs) issued by maritime agencies. VNI data come directly from navigators. As navigators encounter the latest maritime traffic conditions and natural and human-made emergencies during navigation they can upload the information through ECDIS or a mobile platform [38].
4.3. MTOS Specifications
4.3.1. Services Data Standard
MTOS is a data service that requires specifications to define the usage, data structure, data exchange protocol, and encoding format. The IMO has mandated that all maritime services covered by its strategy of e-Navigation adhere to the S-100 standard [39]. In this study, the specification of each service was based on the S-100. These specifications are the languages that allow platform and terminal systems to recognize each other’s information. A logical data structure is defined by using Unified Modelling Language class diagrams and explanatory tables (See Appendix A). The encoding formats are defined by JSON and XML. The Application Specific Message of Automatic Identification Systems (AIS-ASM) is used for the MTOS network exchange protocol to support the service publication.
4.3.2. Service Publishing Method
Traditional service methods do not provide on-demand services, and there are matters such as information redundancy and untimely service delivery that prevent them from meeting the requirements of the MASS traffic organization. Therefore, we propose the notion of a phased service and design the algorithm of service automatic publishing to accomplish the on-demand and automated publishing of MASS traffic organization information. In addition, we have kept the ship-requested mode of service to deal with the possibility of emergencies.
The notion of phased service. As shown in Figure 5, we divide the process of entering and departing the port into five stages, including the VTS reporting line stage, the anchorage waiting stage, the entering port stage through the channel, the operating stage at the berth, and the departing port stage through the channel. The services required by the MASS at different stages vary. To address the issue of information redundancy, MTOS will provide MASS at all degrees with service information according to their needs at each stage.
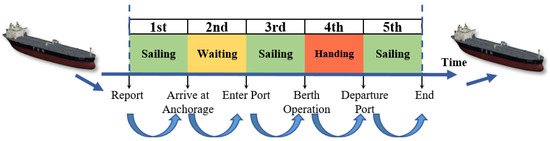
Figure 5.
The process of a vessel entering and departing.
The algorithm of service automatically publishes. According to the above service notion, this part designs an automatic service publication algorithm based on the location relationship between the vessel position and the service area. The service’s triggering area is distinguished according to its shape. The area of the VTS report line is represented by a circle, the area of the anchorage and channel by a polygon, and the area of the berth by a point.
- 4.
- Service automatic publishing algorithm of VTS report line area
The center and radius information of the circular report line can be obtained from the VTS user guide. The vessel’s longitude and latitude coordinates received from real-time AIS data is . By calculating the distance between the center of the circle and the vessel position and comparing its relationship with , it can be determined whether the vessel has reached the reporting line. The geometric model is shown in Figure 6. The distance s is computed as:
where is the long radius of the ellipsoid, is the oblateness of the ellipsoid, is the distance between the center of the circle and the vessel position, is the spherical distance calculated according to geographical longitude and latitude (unit: radian).
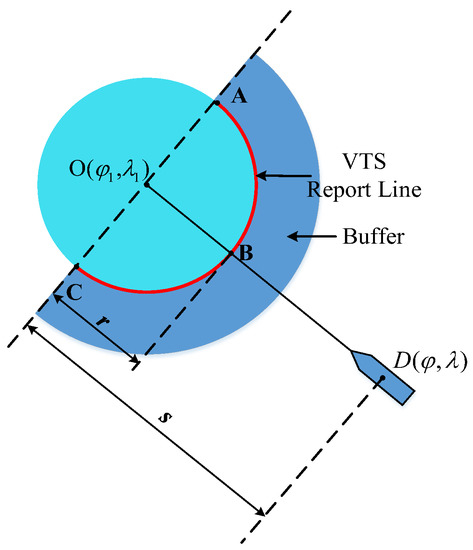
Figure 6.
Service trigger geometric model of VTS report line area.
- 5.
- Service automatic publishing algorithm of anchorage and channel areas
The anchorage and channel regions are polygonal, and whether or not the vessel is traveling through them may be established by analyzing the positional connection between the vessel’s location and the polygonal region. According to the port VTS user guide, the longitude and latitude coordinates of the polygon boundary point are and . The vessel’s longitude and latitude coordinates received from real-time AIS data are . As shown in Figure 7, according to the Mercator projection formula [40], the longitude and latitude coordinates are translated into the ship position plane coordinates and the polygon area border point plane coordinates and . Calculate the distance between point and line . When , the ship arrives at the polygon border, triggering the service automatically receives the information given by VTS. The distance is computed as:
where is the plane coordinate of the vessel position, is the plane coordinate of the polygon boundary point , is the plane coordinate of the polygon boundary point .
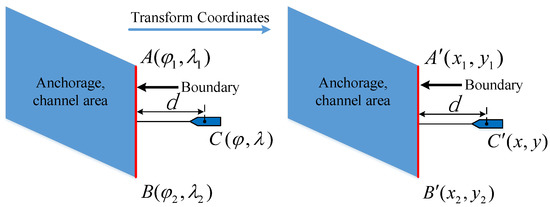
Figure 7.
Service trigger geometric model of anchorage and channel areas.
- 6.
- Service automatic publishing algorithm of berth area
The mechanism of the berth region automatic publishing service is to judge whether the vessel is berthing by judging the distance d from the vessel position point to the berthing point and the ship width (the value is obtained by AIS). The calculation method of distance is shown in Equations (1) and (2). When , the berthing service is activated, the geometric model is shown in Figure 8.
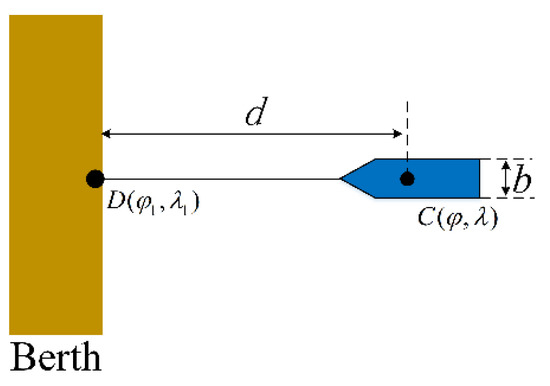
Figure 8.
Service trigger geometric model of berth area.
5. Experiments and Results
5.1. Verify the Performance of MTOS Publishing Service Information
We conducted simulation experiments in Tianjin port, Bohai Sea, China. This experiment primarily focuses on the publication and presentation of MASS traffic organization service information. Taking the degree III MASS “SLLY” as an example, it will call at Tianjin port.
Figure 9 shows the experimental result of the service at the VTS reporting line stage. When the “SLLY” reaches the buffer, which is two nautical miles from the Tianjin VTS reporting line, it will transmit reporting information to the VTS and begin the reporting stage. When it arrives at the VTS reporting line, MTOS will automatically provide it with information. Due to the fact that all berths are occupied, the vessel must anchor at the Dagukou South Anchorage to wait. Due to there being no seafarers on the “SLLY”, MTOS directly provides it with the result information such as anchor position and the time of anchor drop according to the number and distribution of ships in the anchorage. But, instead, when the degree I MASS “DJDL” goes to the anchorage, MTOS provides it with information such as anchorage name, anchorage position, the range of depth, etc. Due to the fact that the seafarers can operate the vessel to drop anchor according to this information.
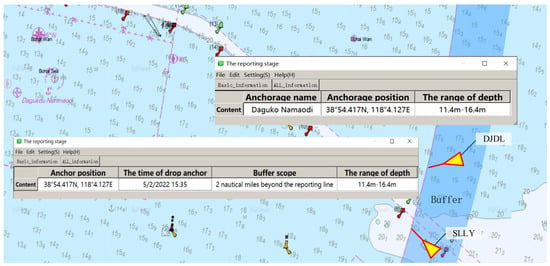
Figure 9.
The experimental result of the service at the VTS reporting line stage.
Figure 10 shows the experimental results of the service at the anchorage waiting stage. For the “SLLY”, MTOS provides it with traffic organization information such as the type of channel, the time of heaving anchor, and the time of arrival channel according to the characteristics of its no seafarers on board. Since the pilot cannot board “SLLY”, MTOS also provides the ship with information such as the starting position and time of remote pilotage. For the degree II MASS “Xin Chun Shun”, MTOS just has to provide information such as the type of channel utilized for entering the port and the boarding time of the pilot because the pilot can board the ship for pilotage. The time of the heaving anchor, the time of arrival channel and other scheduling information will be determined by the pilot according to the situation at that time.
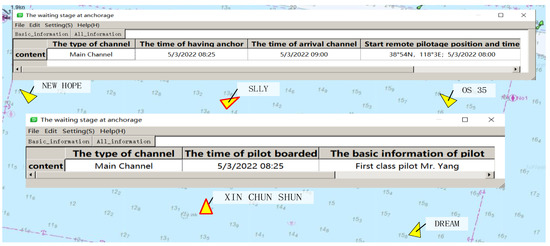
Figure 10.
The experimental result of the service at the anchorage waiting stage.
Figure 11 shows the experimental result of the service at the entering port stage through the channel. MTOS not only provides ships with transverse and longitudinal safety space between ships but also provides ships with early warning service during the tidal window time. The sample has the benefit of prompting ships to alter their speed correctly, ensuring that the ships enter the port inside the tidal window time and avoid grounding.
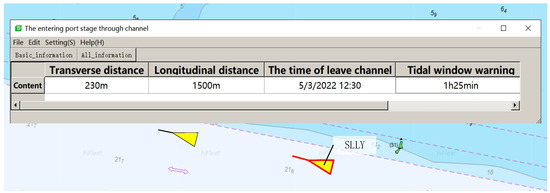
Figure 11.
The experimental result of the service at the entering port stage through the channel.
Figure 12 shows the experimental results of the service at the operating stage at the berth. When the first cable is ashore, the “SLLY” enters the operating stage at berth. MTOS can provide loading and discharging plan information for it by integrating cargo, workers, and equipment information. Furthermore, MTOS will provide it with information about the port operation unit at this stage, so that the vessel may contact the person in charge of operation when required, as shown in (a). After the vessel completes the operation, MTOS mainly transmits the estimated time of departure, the type of channel, and the time of arrival channel to the vessel, as shown in (b). On the contrary, MTOS only needs to provide ETD, channel type used for departure, and other basic information for the degree I MASS “SUCCESS”, as shown in (c).
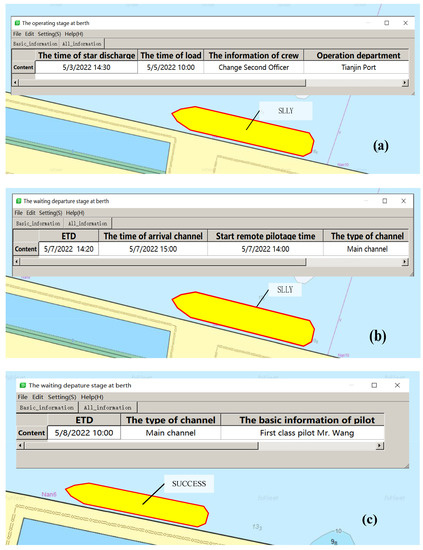
Figure 12.
The experimental results of the service at the operating stage at the berth. (a) “SLLY” is operating at berth; (b) “SLLY” has completed the operation and is waiting for departure; (c) “SUCCESS” is waiting for departure.
Similarly, MTOS will also provide transceiver and longitudinal distance, the time of departure channel, and remote pilotage information for “SLLY” when it departs the port through the channel, as shown in Figure 13.
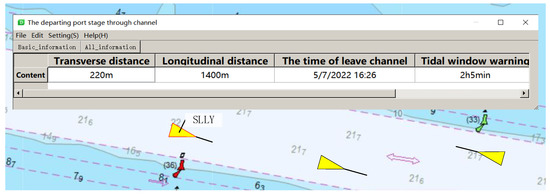
Figure 13.
The experimental results of the service at the departing port stage through the channel.
5.2. Determine the Effect of MTOS on Port Traffic Safety
The main purpose of this experiment is to determine whether MTOS has a measurable effect on port traffic safety, the following methodology was used:
- Establish port traffic scenarios;
- Simulation of the scenarios with and without the MTOS; and
- Analysis and discussion of experimental results.
It should be noted that other factors that may have an influence when analyzing possible effects of introducing MTOS services such as usability of ECDIS in general, the familiarization and training in the use of the services, the experience of the test participants, etc. have not been considered in this study.
5.2.1. Create Simulation Scenarios
The Huanghua Port and Tianjin Port are selected, as they are good examples of heavily-trafficked areas with different characteristics. The Tianjin Port scenario represents one of China’s busy traffic corridors with numerous recommended routes, junction areas, and crossing ferry routes (e.g., the compound channel, the Y-shaped channel, and the navigation warning area). Tianjin Port has the first artificial compound channel in China, and more than three traffic flows cross the entrance and exit of the channel. Vessels are prone to crossing situations frequently, posing severe challenges to navigation safety. Therefore, Tianjin Port can represent the port scene with heavy traffic. Compared with Tianjin Port, the ship traffic flow of Huanghua Port is relatively sparse. However, the Huanghua Port has the most extended artificial channel in the Bohai Sea; the scenario focused more on the port approach and less on dense traffic conditions in confined waters. This scenario can better help us study the MASS traffic organization method in the channel. As shown in Table 2, eight scenarios were specified based on the combination of three parameters: location visibility, and wave height. Three groups are included in each scenario to analyze the effect of MTOS on maritime traffic safety when the degree of MASS is different, as shown in Table 3. Each scenario was executed 10 times with and without the availability of MTOS.
Table 2.
Scenarios parameters.
Table 3.
Group parameters.
5.2.2. Method for Assessing Port Traffic Safety
Assessing the safety level of a specific traffic situation at port areas is very difficult, especially if more than two vessels are involved. A high collision probability means a low safety level, and vice versa. In the experiment, we determined the factors affecting the collision risk of two vessels: CPA, TCPA, encounter situation, and traffic density. This analysis is based on a method and data developed and obtained by students as a part of their Bachelor Thesis at the Chalmers University of Technology. A maritime collision safety index method was developed based on in-depth interviews with thirteen experienced officers evaluating the safety in various angles of a two-vessel traffic scenario taking the CPA and TCPA into consideration [41]. This basis can be used in a multi-vessel traffic scenario by splitting up the multi-vessel scenario into each traffic encounter and choosing the collision safety index from the least safe encounter.
Determine the encounter situation. In this method, the encounter situation between two vessels is assessed every 30 s. If the distance between the vessels is larger than 12 nautical miles, the situation is considered to be totally safe (i.e., safety index = 1). If the distance is less than 12 nautical miles, the type of encounter situation is identified according to the method in the Sea Traffic Management (STM) project numerical analysis data safety index report [42].
The basic safety index, SI0, was then interpolated from values found in tables based on the type of situation, CPA, and TCPA. These tables can be obtained from the survey and interview of experienced sailors recorded in a bachelor’s thesis of Chalmers University of Science and Technology [41].
Adjustment of the basic safety index for traffic density (TD). TD is defined by the number of vessels within a circle with a radius of two nautical miles and the vessel itself as the origin. The complex traffic density in port waters will make it more difficult for vessels to maneuver. Therefore, the safety index needs to be further adjusted according to the TD. The safety index is adjusted due to traffic density according to Equation (4) [42].
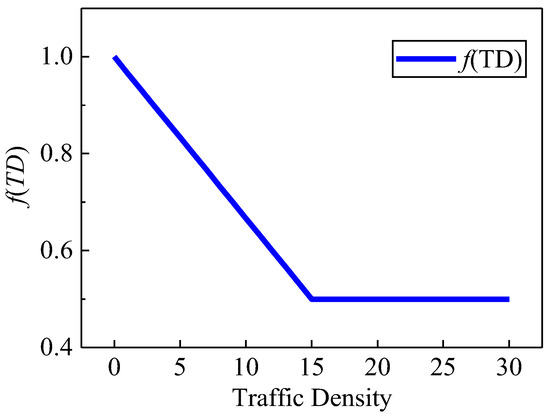
Figure 14.
The curve of the adjustment factor.
Definitions of minor/major incidents and accidents. To further focus on traffic safety, the data from the simulation runs were categorized into counts of minor/major incidents and accidents. A minor incident is defined by a safety index below 0.5 and a major incident is defined by a safety index below 0.2. An accident is defined as an actual collision.
5.2.3. Results of Simulation Experiments
As shown in Table 4 and Table 5, to evaluate the possible effects of introducing MTOS on traffic safety the following data was calculated and subsequently compared:
Table 4.
Results of simulation experiments in Tianjin port.
Table 5.
Results of simulation experiments in Huanghua port.
- The safety index was calculated every 30 s for all vessels in each simulator run resulting in an average Safety Index for each run; and
- The number of minor incidents, major incidents, and accidents was counted.
- 7.
- Average safety index with and without MTOS
As shown in Figure 15, the average safety index with or without MTOS in each scenario is compared. It can be seen that the safety index of Tianjin Port and Huanghua Port during the MTOS run are higher than those when MTOS is not in the run.
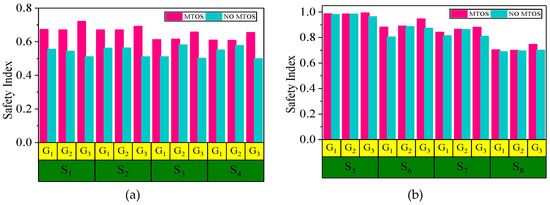
Figure 15.
Comparison results of average safety index in different scenarios. (a) Tianjin Port; (b) Huanghua Port.
- 8.
- Average safety index of different groups with MTOS
As shown in Figure 16, the safety index of different groups in the same scenario is compared. It can be seen that, when the MTOS is running, the group with a large proportion of degree III and degree IV MASS has a large safety index.
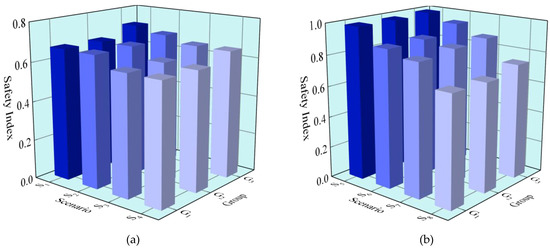
Figure 16.
Comparison results of average safety index in different groups: (a) Tianjin Port; (b) Huanghua Port.
- 9.
- Change in minor and major incidents
In the Tianjin Port and Huanghua Port scenarios, minor and major incidents decrease when the MTOS is available. Still, the reduction rate of incidents in Tianjin Port is greater than that in Huanghua Port, as shown in Table 6.
Table 6.
Results of comparison of changes in minor and major incidents.
5.3. Analysis and Discussion
The Tianjin Port and the Huanhua Port were selected as they are good examples of heavily trafficked areas but with different characteristics.
The Tianjin Port is the strategic fulcrum of the 21st Century Maritime Silk Road, knowns for its complex waterway type and heavy water traffic. The Tianjin port scenario focused mainly on such traffic in the compound channel and “Y-shaped” channel, more than three vessel traffic flows were encountered at the entrance and exit of the channel which heavily disturbed the normal traffic as the frequent ship encounters, especially crossing situation. In contrast to the Tianjin Port, the Huanghua Port was navigation-wise far less confined and therefore resulted in less traffic density and consequently fewer close-quarters situations between vessels. The Huanghua Port scenario focused more on port long-channel, traffic coordination, and decision-making by the bridge teams at a larger range (i.e., strategic navigation) and less on dense traffic conditions in confined waters as compared with the Tianjin Port.
All runs regardless of the area had a consistently relatively high average safety index. The safety index is generally higher in the Huanghua Port scenarios compared to the Tianjin Port scenarios. The reason for that is likely to be the density of traffic and the number of navigational constraints which differs notably between the Tianjin Port and Huanghua Port scenario. In the Tianjin Port scenarios, the traffic was dense, vessels were frequently encountered in the intersection areas, and there were limited possibilities of applying a strategic navigation methodology, i.e., longer-term planning. In this situation, the effect of MTOS’s phased service mode is more obvious. By planning and organizing MASS traffic at different stages in advance as needed, the occurrence of ship encounters in the intersection areas can be reduced, and the average safety index is relatively improved. In contrast, in the Huanghua Port scenarios, decisions regarding traffic situations were made at larger distances and consequently with fewer time constraints. Therefore, the phased service effect of MTOS is not obvious.
In the same scenarios, the effect of MTOS on different groups is also different. When the proportion of degree III and degree IV MASS in the group is relatively large, MTOS has a good improvement on the average safety index. However, for the group with more degree I and degree II MASS, the effect of MTOS is not obvious. The main reason may be that degree I and degree II MASS are seafarers, and their actions may interfere with MTOS’s operation.
In terms of the number of incidents, compared with the absence of MTOS, the number of minor/major incidents that occurred in the port areas during the MTOS operation is reduced. In Tianjin Port, the number of minor incidents decreased by 27.28%, and the number of major incidents by 25.00%. In Huanghua Port, the number of minor incidents decreased by 18.19%, and the number of major incidents by 14.29%. Although it can be seen from the experimental results that MTOS plays a positive role in improving maritime traffic safety, our research also has some limitations:
- The model using a safety index is based on two MASS traffic encounters in port areas. However, in the port area where there are dense ships, there may be a situation where multiple ships cross.
- Although many scenarios of simulation experiments have been carried out according to Tianjin and Huanghua Port, different numbers and degrees of MASS have been designed for comparison. However, MASS are still conceptual and have not been formally put into commercial operation. Therefore, the simulation experiment scenario designed in the manuscript can not fully represent the traffic situation of the port waters after MASS operation in the future.
- MTOS is a novel solution for all MASS. This work does not involve the coexistence of MASS and traditional manned vessels.
6. Conclusions and Further Research
In this paper, the notion of on-demand service for MASS traffic organization is proposed. The demands of all degrees of MASS traffic organization are identified by analyzing their features in traffic organization service process, scope, and emergency response. Then the complex actual requirements and general function descriptions are transformed into intuitive and quantitative maritime service information. We developed MTOS based on the e-Navigation technology system, which is the first maritime service for MASS. We proposed a phased service mode based on the vessel arrival stage to realize on-demand service for all degrees of MASS. At a more strategic level, the existing e-Navigation strategy does not include a high-level design for MASS, it mainly focuses on basic maritime services such as TOS, information service (INS), and navigational assistance service (ANS) for traditional manned ships. In the future, these services cannot meet the requirements of unmanned ships in traffic organization, intelligent pilotage, and autonomous navigation. Therefore, the development of MTOS not only meets the new needs of the intelligent development of water traffic organization in the future but also provides the basis for the e-Navigation strategy to adapt to the development of MASS.
The main significances of this paper are as follows: improving the MASS intelligent transportation maritime services to ensure the safety of marine traffic; realizing information sharing of MASS intelligent traffic organization service. The MTOS provides an effective method for MASS intelligent traffic organization maritime service and related technical service references for other Maritime Services. It is also of great significance for the establishment of intelligent maritime.
Considering that this research is still in its infancy on a global scale, with few resources and real data to draw on, we will continue investigating the features of MASS traffic organization service and continue to improve the service content of MTOS on an ongoing basis. On the other hand, we seek to establish an intelligent TOS in the mixed traffic scenario including manned vessels and MASS. By constructing an intelligent vessel traffic organization model and designing an efficient solution algorithm, we can support VTS operators to complete the intensive incoming or outgoing scheduling of manned vessels and MASS more conveniently and efficiently. One example refers to the case of the current discussion of the incoming or outgoing scheduling of large ships in the comprehensive port area of Huanghua port, in the process of vessels entering or departing the port, provide them with intelligent scheduling information such as ship sequence, time to reach each key point and speed. Finally, from an application area point of view, in addition to the VTS areas, it is also necessary to study the TOS of mixed traffic scenarios in narrow waterways, polar waters, inland rivers, and other complex waters.
Author Contributions
W.G.: conceptualization, methodology, software, writing—original draft. X.Z.: data curation, writing—review and editing. J.W.: formal analysis, methodology. H.F.: funding acquisition. N.A.T.: writing—review and editing. All authors have read and agreed to the published version of the manuscript.
Funding
This research was funded by the Central Guidance on Local Science and Technology Development Fund of Shenzhen, grant number 2021Szvup014, and the Dalian Science and Technology Innovation Fund, grant number 2022JJ12GX015.
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
Not applicable.
Acknowledgments
We thank the terminal operators of the Tianjin container terminal for the data to support this work. Furthermore, the authors appreciate the reviewers for their helpful comments and suggestions.
Conflicts of Interest
The authors declare no conflict of interest.
Appendix A
Appendix A records the logical data structure of MTOS. Figure A1 shows the overall logic structure of MTOS in UML based on S-100. The feature catalog of MTOS is shown in Table A1. The information type of MTOS is shown in Table A2.

Figure A1.
S-100 data model of MTOS Notes: * indicates numerous. 1 indicates that the attribute must exist, 0..* indicates the attribute can exist or be ignored.
Table A1.
MTOS_FeatureCatalog.
Table A1.
MTOS_FeatureCatalog.
| Role Name | Name | Description | Mult | Type | Remarks |
|---|---|---|---|---|---|
| Class | MTOS_FeatureCatalog | MTOS information | - | - | - |
| Attribute | Name | MASS traffic organization service (MTOS) | 1 | Character String | |
| Attribute | Scope | The specific demand of the TOSMTS | 1 | Character String | |
| Attribute | Field of application | Mixed transportation maritime service in the coastal VTS areas | 0..1 | Character String | |
| Attribute | Version number | 1.0 | 1 | Character String | |
| Attribute | Version date | August 2022 | 1 | Date | |
| Attribute | Producer | Maritime Intelligent Transportation Research Team, Dalian, China | 1 | Character String | |
| Role | Item | MTOS_FC_Information Type | 1..* | MTOS_FC_Item | Aggregation |
| Role | Definition Source | https://iho.int/uploads/user/pubs/standards/s-100/S-100_Edition_3.0.0.pdf (accessed on15 June 2021) | 0..* | FC_DefinitionSource | Aggregation |
| Role | classification | The classification of the Feature Catalogue. | 0..1 | FC_ClassificationCode | 1. unclassified |
Notes: * indicates numerous, 1, 1..* indicates that the attribute must exist, 0..1, 0..* indicates the attribute can exist or be ignored.
Table A2.
MTOS_FC_InformationType.
Table A2.
MTOS_FC_InformationType.
| Role Name | Name | Description | Mult | Type | Remarks |
|---|---|---|---|---|---|
| Class | MTOS_FC_Information Type | - | - | - | Derived from S100_FC_ FeatureCatalogue |
| Attribute | Definition | Information needed to realize intelligence or depart the port of ships | 1 | String | - |
| Attribute | Code | Identifier = St1 | 1 | String | - |
| Attribute | Is Abstract? | No | 1 | Boolean | - |
| Attribute | Feature use type | Aggregate features | 1 | Composed of multiple feature types | - |
| Role | Anchorage information | Identifier = St1.1 | 1..* | Subtype | Name, capacity, anchorage position, the range of depth. |
| Role | Channel information | Identifier = St1.2 | 1..* | Subtype | Type, the position of start and end points, length, breadth, minimum depth, maximum navigable speed. |
| Role | Berth information | Identifier = St1.3 | 1..* | Subtype | Number, berth position, length, breadth, minimum depth, trend. |
| Role | Ship scheduling information | Identifier = St1.4 | 1..* | Subtype | The estimated time of arrival (ETA), the estimated time of departure (ETD), buffer scope, estimated anchor position, the time of drop anchor, the time of heaving anchor. |
| Role | Early warning information | Identifier = St1.5 | 1..* | Subtype | Navigation longitudinal and transverse spacing warning, overtaking warning, crossing warning. |
| Role | MASS degree information | Identifier = St1.6 | 1..* | Subtype | Degree of MASS from I to IV. |
| Role | Remote control information | Identifier = St1.7 | 1..* | Subtype | Main thruster command, side thruster command, steering gear control, and sound signal control. |
| Role | Remote pilotage information | Identifier = St1.8 | 1..* | Subtype | Start pilotage position, enter channel time, leave channel time, time to start berthing |
| Role | Monitori Auxiliary decision informationng information | Identifier = St1.9 | 1..* | Subtype | Onboard real-time video information, surrounding target information perceived by onboard radar and AIS, hydrological and meteorological information of navigation area. |
| Role | Ship status information | Identifier = St1.10 | 1..* | Subtype | Navigation status (heading, course, speed, draft), equipment status (engine room equipment, conduction equipment), MASS level. |
| Role | Communication protocol information | Identifier = St1.11 | 1..* | Subtype | Data format, communication encryption level, communication control (start, control, end), communication address. |
| Role | Bad weather information | Identifier = St1.12 | 1..* | Subtype | Channel opening and closing information, emergency anchor location, and marine weather condition. |
| Role | Ice information | Identifier = St1.13 | 1..* | Subtype | Thickness and scope of ice, ship’s route in ice area, location of the icebreaker. |
| Role | Restricted visibility information | Identifier = St1.14 | 1..* | Subtype | Recommended speed, light, sound, and shape, high-frequency broadcast of aids to navigation. |
| Role | Emergency information | Identifier = St1.15 | 1..* | Subtype | Accident type, emergency refuge location, accident impact scope, suggested route to avoid, search and rescue information. |
| Role | Auxiliary decision information | Identifier = St1.15 | 1..* | Subtype | TCPA, DCPA, recommend speed and course |
Notes: * indicates numerous, 1, 1..* indicates that the attribute must exist.
References
- Internation Maritime Organization. Regulatory Scoping Exercise for the Use of Maritime Autonomous Surface Ships (MASS); Maritime Safety Committee 100/5: London, UK, 2018.
- MUNIN. Research in Maritime Autonomous Systems Projects Results and Technology Potentials. Available online: http://www.unmannedship.org/munin/wp-content/uploads/2016/02/MUNIN-final-brochure.pdf (accessed on 10 May 2022).
- Jia, C.C. Impact of Maritime Autonomous Surface Ships (MASS) on VTS Operations. Master’s Thesis, World Maritime University, Malmo, Sweden, 2018. [Google Scholar]
- Yunus, E.S.; Veysel, G.; Alper, S. Swot-ahp analysis of autonomous shipping. In Proceedings of the 4th International Multidisciplinary Congress of Eurasian, Rome, Italy, 18 August 2017. [Google Scholar]
- Park, Y.S. A study on the improvement of VTS system by the Introduction of maritime autonomous surface ship (MASS). Korean Assoc. Marit. Police Sci. 2020, 10, 19–50. [Google Scholar] [CrossRef]
- Zhang, X.Y.; Li, J.J.; Zhu, S.F.; Wang, C.B. Vessel intelligent transportation maritime service portfolios in port areas under e-navigation framework. J. Mar. Sci. Tech.-Japan 2020, 25, 1296–1307. [Google Scholar] [CrossRef]
- Zhu, S.F.; Zhang, X.Y.; Xu, C.B.; Zhang, H.H. Overview of research on maritime service set of ship transportation. China Water Transp. 2016, 16, 65–67+70. [Google Scholar]
- Internation Maritime Organization. Initial Descriptions of Maritime Services in the Context of E-Navigation. Available online: https://www.imo.org/en/OurWork/Safety/Pages/eNavigation.aspx (accessed on 7 September 2022).
- Baldauf, M.; Kitada, M.; Mehdi, R.; Dalaklis, D. E-navigation, digitalization, and unmanned ships: Challenges for future maritime education and training. In Proceedings of the 12th International Technology, Education and Development Conference, Valencia, Spain, 16 March 2018. [Google Scholar]
- Baldauf, M.; Fischer, S.; Kitada, M.; Mehdi, R.A.; Al-Quhali, M.A.; Fiorini, M. Merging Conventionally Navigating Ships and MASS-Merging VTS, FOC and SCC? TransNav Int. J. Mar. Navig. Saf. Sea Transp. 2019, 13, 495–501. [Google Scholar] [CrossRef]
- International Chamber Shipping. ICS-Annual-Report-2020. Available online: https://www.ics-shipping.org/wp-content/uploads/2020/11/ICS-Annual-Report-2020-Chinese-version.pdf (accessed on 13 October 2022).
- Zheng, G.; Xing, Y.; Wang, Y. A brief analysis of maritime support requirements for maritime surface autonomous ships (MASS). Marit. Technol. 2021, 2, 72–75. [Google Scholar]
- Relling, T.; Margareta, L.; Ostnes, R.; Petter, H.H. The contribution of Vessel Traffic Services to safe coexistence between automated and conventional vessels. Marit. Policy Manag. 2022, 49, 990–1009. [Google Scholar] [CrossRef]
- Relling, T.; Praetorius, G.; Odd, S.H. A socio-technical perspective on the future Vessel Traffic Services. Necesse 2019, 4, 112–129. [Google Scholar]
- Kim, T.; Perera, L.P.; Sollid, M.P.; Batalden, B.M.; Sydnes, A.K. Safety challenges related to autonomous ships in mixed navigational environments. WMU J. Marit. Aff. 2022, 21, 141–159. [Google Scholar] [CrossRef]
- Fan, C.L.; Wróbel, K.; Montewka, J.; Gil, M.; Wan, C.P.; Zhang, D. A framework to identify factors influencing navigational risk for Maritime Autonomous Surface Ships. Ocean. Eng. 2020, 202, 107188. [Google Scholar] [CrossRef]
- Abdelmoula, A.A.; Khalifa, M.; Mohamed, Y.; Mohammed, Q. Toward a new maritime communication system in Detroit of Gibraltar where conventional and autonomous ships will co-exist. In Proceedings of the 2017 International Conference on Wireless Networks and Mobile Communications (WINCOM), Rabat, Morocco, 1 November 2017. [Google Scholar]
- Wróbel, K.; Gil, M.; Montewka, J. Identifying research directions of a remotely-controlled merchant ship by revisiting her system-theoretic safety control structure. Saf. Sci. 2020, 129, 104797. [Google Scholar] [CrossRef]
- Bogusławski, K.; Nasur, J.; Li, J.; Gil, M.; Wróbel, K.; Goerlandt, F. A Cross-Domain Scientometric Analysis of Situational Awareness of Autonomous Vehicles With Focus on the Maritime Domain. IEEE Access 2022, 10, 50047–50061. [Google Scholar] [CrossRef]
- Bogusławski, K.; Gil, M.; Nasur, J.; Wróbel, K. Implications of autonomous shipping for maritime education and training: The cadet’s perspective. Marit. Econ. Logist. 2022, 24, 327–343. [Google Scholar] [CrossRef]
- Hong, T. Building a Fusion Information System for Safe Navigation. Int. J. Fuzzy Log. Intell. Syst. 2014, 14, 105–112. [Google Scholar] [CrossRef]
- Hu, C.C.; Peng, G.J.; Zhou, X.L. Carry out e-navigation research-promote the innovation of maritime management services in China. Port Econ. 2014, 14, 43–45. [Google Scholar]
- Shin, I.; Hwang, H.; Lee, J. A Development of Simulation System based on Scenario for Evaluation of e-Navigation MSP. J. Korean Soc. Mar. Eng. 2015, 39, 86–93. [Google Scholar] [CrossRef]
- Cui, H.S.; Wu, L.L. Application of IHO S-100 in E-Navigation. Hydrogr. Aphic Surv. Charting 2015, 35, 55–57. [Google Scholar]
- EfficienSea–Efficient. Safe and Sustainable Traffic at Sea. 2009. Available online: https://www.iala-aism.org/technical/e-nav-testbeds/efficiensea/ (accessed on 16 July 2021).
- MONALISA. Motorways and Electronic Navigation by Intelligence at Sea. Available online: http://www.sjofartsverket.se/monalisa (accessed on 28 September 2021).
- MONALISA 2.0. Motorways and Electronic Navigation by Intelligence at Sea 2.0. Available online: https://www.iala-aism.org/technical/e-nav-testbeds/monalisa-2-0/ (accessed on 25 June 2020).
- ACCSEAS-Accessibility for Shipping, Efficiency Advantages and Sustainability. Available online: https://www.iala-aism.org/technical/e-nav-testbeds/accseas/ (accessed on 25 July 2020).
- SSAP-Smart Ship Application Platform. Available online: https://www.iala-aism.org/technical/e-nav-testbeds/ssap-smart-ship-application/ (accessed on 9 August 2020).
- Sea Traffic Management. Validation. Available online: https://www.seatrafficmanagement.info/ (accessed on 18 August 2020).
- E-Yangshan Port. Available online: https://www.iala-aism.org/technical/e-nav-testbeds/yangshan-port-e-navigation/ (accessed on 19 September 2020).
- IALA. Guideline 1167, VTS Management, Edition 1.0. Available online: https://www.iala-aism.org/product/g1167-ed1-0-vts-management/ (accessed on 5 June 2019).
- Zhang, X.Y.; Li, Y.J.; Zhang, J.; Wang, Z.Q. Optimization of port vessel traffic organization under various channel conditions. In Proceedings of the 13th of the Annual Conference of ITS, Tianjin, China, 17 May 2018. [Google Scholar]
- IALA. Vessel Traffic Services (VTS) Manual, Edition 80. Available online: https://www.iala-aism.org/product/iala-vts-manual-2021/ (accessed on 25 August 2020).
- International Business Machines. ICC-IMB Piracy and Armed Robbery Against Ships, January–March 2018. Available online: https://www.icc-ccs.org/reports/2018-Q2-IMB-Piracy-Report.pdf (accessed on 19 May 2020).
- Wróbel, K.; Montewkab, J.; Kujalac, P. Towards the assessment of potential impact of unmanned vessels on maritime transportation safety. Reliab. Eng. Syst. Safe. 2017, 165, 155–169. [Google Scholar] [CrossRef]
- Futurenautic. Autonomous Ships 2016 Roundtable White Paper. Available online: https://www.futurenautics.com/product/autonomous-ships-2016-roundtable-white-paper/ (accessed on 9 August 2021).
- Luo, J.N.; Wan, X.X.; Duan, J. A new model of environment-aware Geographic Information services in e-Navigation. J. Navig. 2020, 73, 471–484. [Google Scholar] [CrossRef]
- Internation Maritime Organization. Guidance on the Definition and Harmonization of the Format and Structure of Maritime Services in the Context of E-Navigation. Available online: https://wwwcdn.imo.org/localresources/en/KnowledgeCentre/IndexofIMOResolutions/MSCResolutions/MSC.467(101) (accessed on 25 March 2020).
- Zhu, S.F. Preliminary Research on Port Vessel Transport Maritime Service Portfolio under the E-Navigation. Master’s Thesis, Dalian Maritime University, Dalian, China, 2017. [Google Scholar]
- Karizi, M.; Liontaki, M. Development of a Maritime Collision Safety Index Method. Master’s Thesis, Chalmers University of Technology, Goteborg, Sweden, 2018. [Google Scholar]
- European Maritime Simulator Network. Numerical Data Analysis Safety Index. Available online: https://bibliotekanauki.pl/articles/117071.pdf (accessed on 5 June 2022).
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).