Abstract
The loss rate is an important index to evaluate the harvesting performance of white radish. To reduce the loss rate, it is necessary to analyze the pulling dynamic characteristics of white radish and then optimize the structure and operating parameters of the harvesting device. In this paper, according to the growth characteristics of white radish in the field, the discrete element method (DEM) was used to simulate the pulling process. The pulling force was calculated using the Edinburgh elasto-plastic adhesion model (EEPA), and the effects of soil bed compactness, pulling speed and angle on the pulling force were analyzed. The tests on pulling mechanics were carried out in the laboratory to verify the accuracy of DEM simulation results. The results showed that in the soft soil bed with compactness less than 2.8 MPa, the pulling force of radish is generally smaller than the leaf breaking force, and it is feasible to pull the radish out directly. While in a soil bed with high compactness, it is necessary to install a loosening shovel to reduce the pulling force thus reducing the loss rate due to leaf breakage. The structure and operating parameters of the harvesting device were designed according to the pulling dynamic characteristics, and the white radish harvesting tests were carried out in different fields. Statistical results show that when the soil compaction was increased from 1.47 MPa to 2.21 MPa, the average loss rate increased from 0.68% to 1.75%, and the average damage rate increased from 2.41% to 2.70%. Similarly, when the forward speed was increased from 0.18 to 0.47 m/s, the average loss rate increased from 1.08% to 1.30%, and the average damage rate increased from 2.34% to 2.74%. Overall, the maximum loss rate and the maximum damage rate could be controlled below 2.0% and 3.0%, respectively. In the hard soil bed, the loss rate can be effectively reduced from 15% to 2.5% by installing a loosening shovel.
1. Introduction
White radish is a root vegetable widely cultivated in East Asian countries. It becomes an important cash crop due to its advantageous short growth cycle, strong cultivation adaptability and high unit yield [1,2,3]. Compared to carrot, green radish and other tuberous crops, the size of mature white radish is huge. The length is usually over 25 cm, and the mass of a single fruit can reach 0.8–1.5 kg. The soil environment for growing white radish is highly adaptable. It is suitable for cultivation in loose sandy soil beds and can also be cultivated in clayey soil beds [4].
There are two types of harvesting methods for white radish: digging and pulling [5]. The pulling type of harvester is high-efficiency and low-cost because it can continuously complete radish-pulling, leaf-cutting and fruit-collecting operations [6,7,8]. Damage rate and loss rate are two important indicators to evaluate the performance of radish harvesters. Fruit damage mainly occurs during the fruit–leaf separation process, and fruit loss mainly occurs during the radish-pulling process [9,10]. Once the pulling force of radish is greater than the breaking force of the leaves, the radish will not be able to be effectively pulled out and will be left in a soil bed. Furthermore, the variation of pulling force also affects the conveying state of radish in the clamping belts and then affects leaf-cutting stability and the fruit damage rate.
The field growth state and soil environment are the most important factors affecting the pulling dynamic characteristics. Unlike the field growth of carrot, the mature white radish fruit grows partially outside the soil bed, as shown in Figure 1a. The leaves of white radish are thicker, and the breaking force of leaves is greater. In loose sandy soil beds, it is possible to pull the radish out directly from the field by clamping the leaves. However, in hard clayey soil beds, direct pulling may lead to a rapid increase in the loss rate. The structure and operating parameters of the pulling device, such as clamping force, pulling angle, pulling speed, etc., also have an impact on the pulling stability of the white radish. Therefore, to reduce the loss rate, it is important to analyze the pulling dynamic characteristics of white radish and then optimize the structure and operating parameters of the harvesting device [11].
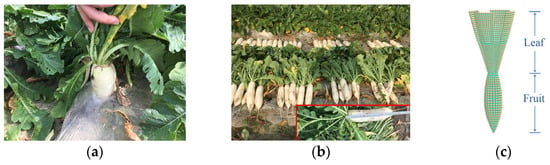
Figure 1.
Growth and model of white radish. (a) Growth state; (b) Shape; (c) DEM Model.
The pulling force comes from the interaction between the radish fruit and the soil bed. Through several decades of development, the discrete element method (DEM) has become the most effective method for analyzing soil–tool interactions [12,13,14]. DEM simulations can obtain macroscopic dynamic properties by calculating microscopic, transient mechanical properties [15,16,17]. Its reliability has been verified by a large number of experiments [18,19]. DEM can also be coupled with other simulation software, which greatly improves its accuracy and application areas [20,21]. The contact model is the key to the accuracy of DEM simulations. Planting soil beds are usually cohesive and compressible [22]. Recently, an elasto-plastic adhesion (EEPA) model was developed to describe this mechanical property, which has been successfully used in many fields of soil dynamics research [23,24,25].
The pulling harvest of radish is a dynamic and continuous process. It is difficult to obtain the effect of the structure and operating parameters of the harvesting device on the harvesting performance through physical tests. This results in the lack of a theoretical basis for the optimization of harvesting devices. Therefore, the objective of this paper was to analyze the pulling dynamic characteristics of white radish using the DEM method and to provide a basis for the optimal design of the pulling device and the operating parameters. The novelty is to accurately describe the pulling force of the radish by using a suitable mechanical model. This study provides a reference for the research of harvesting devices for white radish and can also provide a method for analyzing the harvesting dynamics of other subsoil crops.
2. Materials and Methods
2.1. DEM Simulations
In this paper, five typical white radish varieties were selected as test samples. The geometric and mechanical properties of white radish were measured in the field, as shown in Figure 1b. The white radish generally shows a cone shape. Through statistical calculation, the average length and diameter were 298 and 82 mm, respectively. The average weight of a single fruit was 1.26 kg, and the average depth of fruit in the soil bed was 265 mm. By filling the 3D model with element particles and then bonding them using keys, the white radish model was established in the DEM software (EDEM® 2018, EDEM, Edinburgh, UK), as shown in Figure 1c.
Due to the irregular and random shape of soil particles, five discrete soil particle models with different shapes were established using the clustered particle approach [26], as shown in Figure 2. The primary diameter of the sphere element was 10 mm, and the size ratio varied randomly from 50 to 150%.

Figure 2.
Soil particle models. (a) Sphere; (b) Cylinder; (c) Flat rectangle; (d) Cube; (e) Polyhedron.
The soil bed is cohesive and compressible. The key to improving the accuracy of DEM simulations is to select an appropriate contact model to describe the mechanical properties of the soil bed. Compared with the Hertz–Mindlin model with bonding and the Hertz-Mindlin model with JKR contact, the EEPA model has advantages in capturing the stress-history-dependent responses and the cohesive forces and can simulate the soil dynamic behavior more accurately. The force–overlap schematic diagram of the EEPA model in the normal direction is shown in Figure 3.
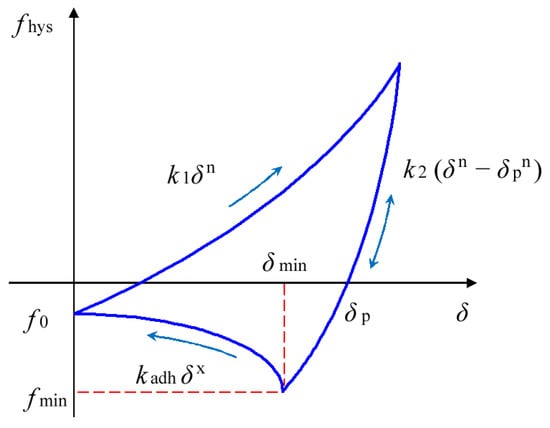
Figure 3.
Normal force–overlap relationship for EEPA contact model.
The normal contact force fn is composed of two parts: the hysteretic spring force fhys and the normal damping force fnd, which can be calculated by
The fhys and fnd can be expressed by
where f0 is the constant adhesion force, δ is the normal overlap, k1 and k2 are the initial loading stiffness and the unloading/reloading stiffness, n is the corresponding power value, kadh is the adhesive stiffness (kadh = fmin/δminx), x is the corresponding power value, and vnrel is the normal relative velocity. Due to plastic deformation δp, k2 is larger than k1. The normal damping coefficient , where m∗ is the equivalent mass of the contact particles, e is the coefficient of restitution.
The tangential contact force fτ is composed of the tangential spring force fτs and the tangential damping force fτd, which can be calculated by
where fτs(t−1) is the tangential spring force at the previous time step, ∆fτs = −kτδτ is the increment of tangential force, kτ is the tangential stiffness, and δτ is the increment of tangential displacement. The tangential damping coefficient , and vτrel is the relative velocity in the tangential direction. The force fτ also needs to satisfy Coulomb’s law, and the limiting tangential friction force fcτ is
where μ is the friction coefficient. Thakur et al. [27] gave a detailed introduction to the governing equations and contact models. Table 1 summarizes the values of the material properties required in the DEM simulation.

Table 1.
Values of material properties used in the DEM simulation.
2.2. Structure of Harvester
The structure and operation parameters of the harvesting device were designed, as shown in Figure 4. The harvesting device was mounted on a differential drive track chassis. Two leaf gatherers were installed at the front of the frame. Two belts were installed on two rows of parallel clamping wheels. The clamping force can be adjusted by a set of compression springs. A rotary leaf cutter was mounted at the rear of the frame. A removable shovel was mounted under the frame.
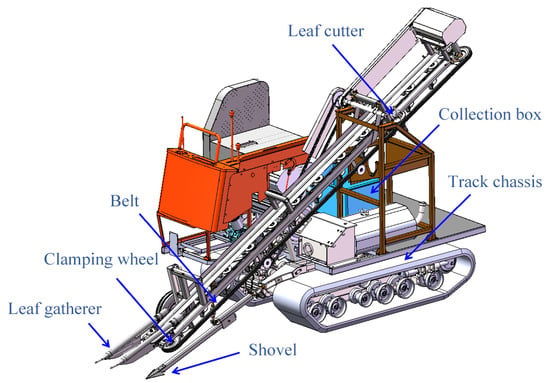
Figure 4.
Structure of white radish harvester.
During the harvesting operation, two leaf gatherers rotated in the opposite direction to gather radish leaves. Then, the leaves were clamped by the clamping wheels and conveyed upward along the frame through the clamping belts, and the radishes were pulled out from the soil bed. After the rotary cutter cut off the leaves, the fruit fell into the collection box, and the leaves were thrown out from the end of the clamping belts.
3. Results
3.1. Leaf Breaking Force
The tensile strength of radish leaves is a key mechanical property that determines whether the radish can be pulled out effectively. Here, the digital force gauge was used to measure the leaf breaking force in the field. The resolution and the measurement error are 1 g and 1.0%. The statistical measurement results are shown in Figure 5. Due to the individual differences of radishes, the breaking force of leaves is distributed in a certain range. When the pulling speed was 0.1 to 0.4 m/s, the breaking force of the leaves was basically normally distributed. The minimum and maximum values were about 66.4 and 123.3 N, respectively. Therefore, one prerequisite for effective radish pulling is that the pulling force should be less than 65 N, or else the leaves may be broken, and the fruit will be lost in the field.
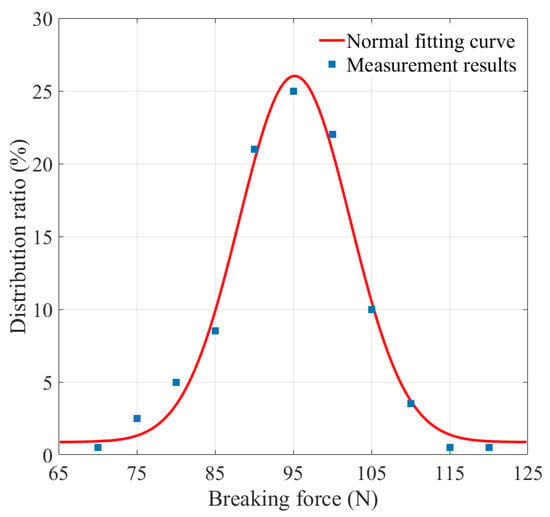
Figure 5.
Distribution of leaf breaking force.
3.2. Soil Bed Properties
The planting environment of white radish is diverse, and the compactness of the soil bed is different. Soil compactness is a major factor affecting the pulling dynamic process. Therefore, an important preparatory work for the DEM simulation of radish pulling dynamics is the establishment of the soil bed. In the DEM simulations, the initially generated soil particles are loose. To obtain soil beds with different compactness, a rigid plane was used to suppress soil particles after the initial generation of the soil bed. Different soil compactness can be obtained by changing the compaction depth. When the soil bed compaction operation was completed, ten uniformly arranged measuring probes were vertically penetrated into the soil bed, as shown in Figure 6. The diameter of the probe model was 12 mm. The probe penetrated the soil bed at a uniform speed of 50 mm/s, and the maximum penetration depth was 100 mm. The probe structure and compactness measurement method were the same as those of the TJSD-750 Soil Compaction Meter.
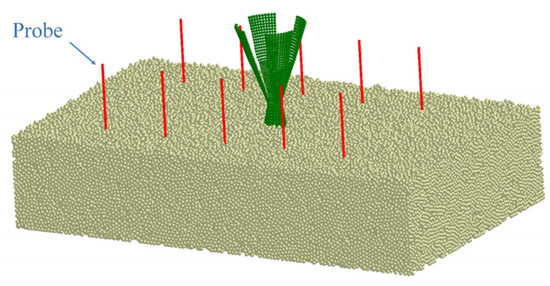
Figure 6.
Measurement of soil bed compactness.
The average force Fm acting on ten probes was recorded at a sampling frequency of 100 Hz. When the compaction depth h is 20 and 60 mm, the variation of Fm is shown in Figure 7. In general, the value of Fm increases with the compaction depth h, and the maximum value of Fm max appears at the maximum penetration depth of 100 mm. Due to the adhesive interaction considered in the EEPA model, Fm does not decrease rapidly but gradually decreases to 0 when the probes stop penetrating. The soil bed is an anisotropic discontinuous medium, and there are certain fluctuations in the variation of Fm. The soil bed compactness SC is calculated with
where S is the cross-sectional area of the probe.
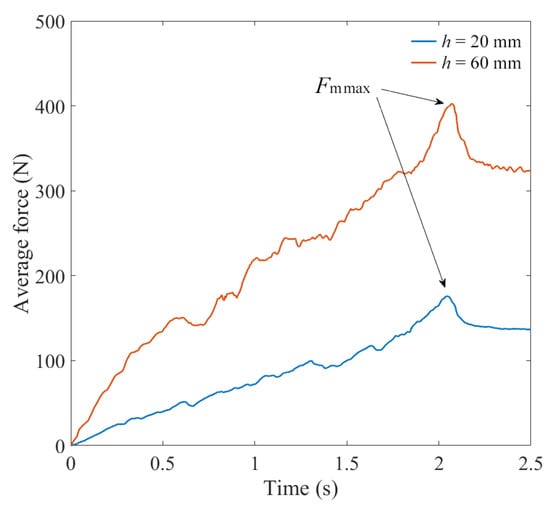
Figure 7.
Variation of average vertical force action on probe.
With the compaction depth h in the range of 10–100 mm, the variation of SC is shown in Figure 8. The relationship between h and SC can be fitted using an exponential function with the form
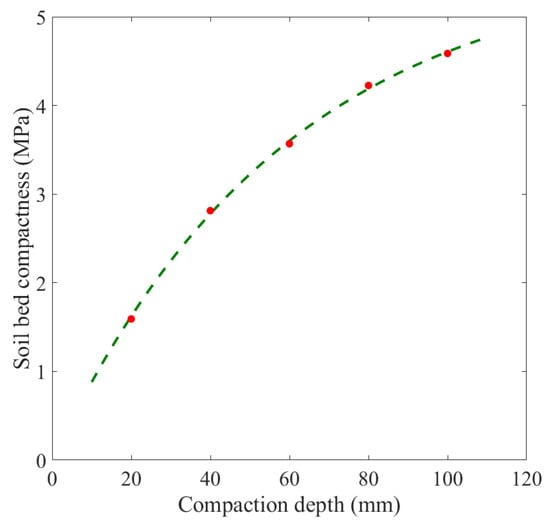
Figure 8.
Relationship between compaction depth and soil bed compactness.
The obtained fitting coefficient a and b were −5.641 and 16.95, respectively. The coefficients of determination R2 were greater than 0.9996.
3.3. Variation of Pulling Force
When the radish is pulled vertically upward with a speed of 0.1 m/s, Figure 9 shows the change process of the pulling force. Suppose that the radish starts to be pulled at the time t = 0. When t < 0, the radish is mainly subjected to the extrusion force of the soil bed, and the extrusion force will increase with the increase in soil bed compactness. At time t = 0, the pulling force Fp suddenly increases and reaches the maximum value Fp max. Then, it gradually decreases to 0 until the radish is completely removed from the soil bed.
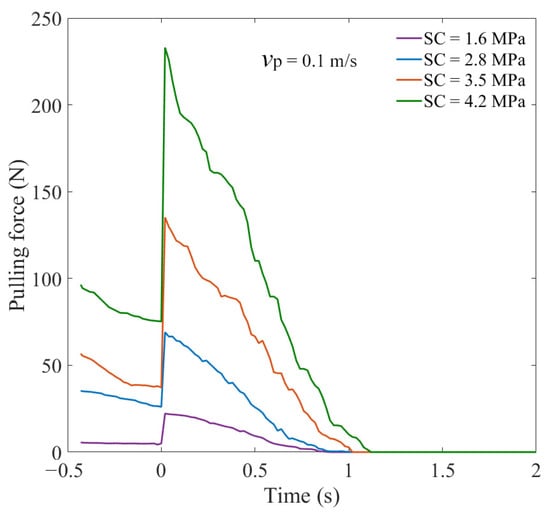
Figure 9.
Variations of pulling force under different soil bed compactness.
As shown in Figure 9, the maximum pulling force Fp max increases rapidly with the increase of SC. With the vertical pulling speed vp of 0.1 m/s, Figure 10 shows the relationship between the maximum pulling force Fp max and SC, which can be fitted using an exponential function with the form
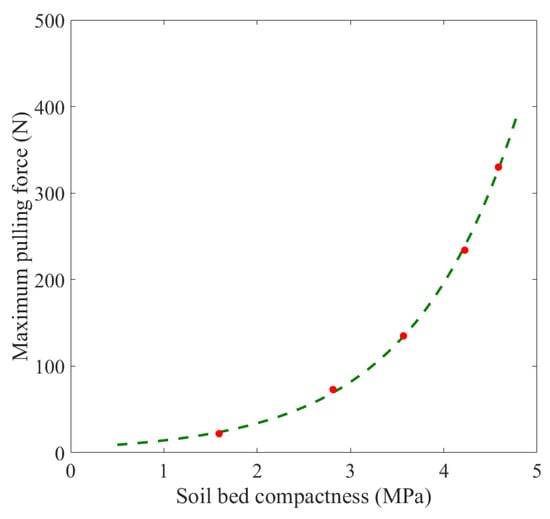
Figure 10.
Effect of soil bed compactness on maximum pulling force.
The obtained fitting coefficients a and b were 5.913 and 0.8753, respectively. The coefficients of determination R2 were greater than 0.9993.
The forward speed of the harvester determines the working efficiency. As the forward speed changes, the pulling speed of the radish also changes, thus affecting the pulling force. Here, the maximum pulling force Fp max at a pulling speed vp of 0.1 m/s is taken as a reference. When the soil bed compactness SC is 1.0–4.5 MPa, Figure 11 gives the increase rate of Fp max at different pulling speeds. According to the shear strength theory, the shear strength of the cohesive soil will increase with the increase of the loading rate, resulting in an increase in the pulling force. As vp increases from 0.1 to 0.5 m/s, the average increase rate of the maximum pulling force γv can reach about 42%. The relationship between γv and vp can be fitted using a function with the form
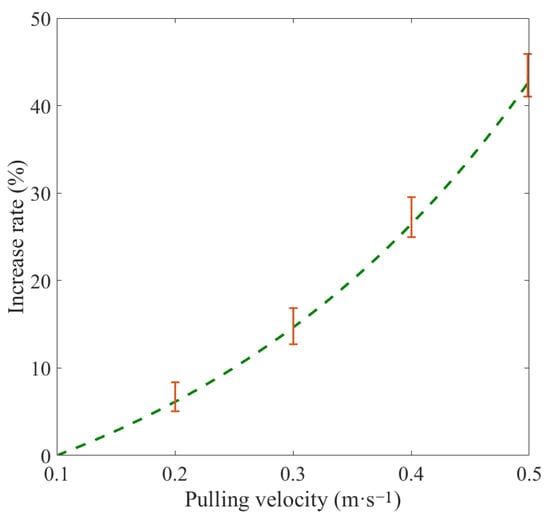
Figure 11.
Effect of pulling speed on maximum pulling force.
The fitting coefficient a and b were 15.80 and 3.277, respectively. The coefficients of determination R2 were greater than 0.9927.
The pulling force is mainly generated by the disturbance of the radish fruit to the soil bed. This disturbance is not only dependent on the pulling speed and soil compactness but is also closely related to the pulling angle. When the pulling speed vp is 0.1 m/s and the pulling angle θ is 0 and 10°, Figure 12 gives the velocity change of the soil particles around the radish fruit when the pulling force reaches the maximum value. Obviously, when the radish is pulled vertically, the disturbance to the surrounding soil particles is minimal. With the increase of θ, the disturbance region and the velocity of soil particles will increase, and the corresponding pulling force will also increase. When vp increases from 0.1 to 0.5 m/s, Figure 13 gives the variation of increase rate of the maximum pulling force γθ.
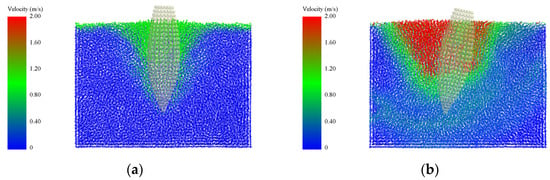
Figure 12.
Disturbance of soil particles at the moment of radish pulling up: (a) θ = 0°; (b) θ = 10°.
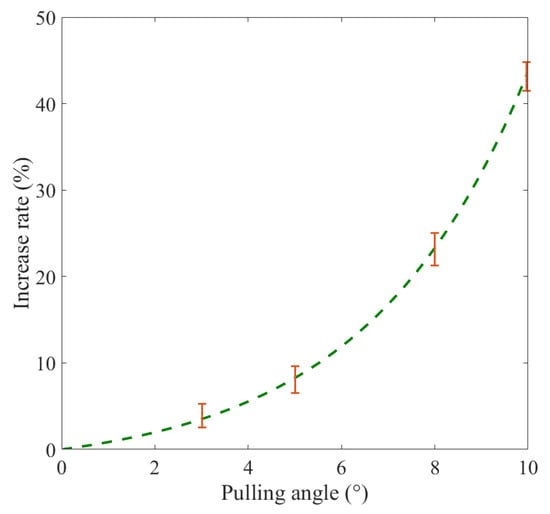
Figure 13.
Effect of pulling angle on maximum pulling force.
3.4. Effect of Loosening Shovel
During the harvesting process, the broken leaves of the radish will cause the fruit to be missed in the field. It is an important loss of the radish harvest. As shown in Figure 10, when soil bed compactness SC is greater than 2.8 MPa, the pulling force will exceed 65 N. In this case, it is necessary to install a loosening device to reduce the pulling force. In this paper, a typical loosening shovel with a double-wing shape was selected. The shovel width was 150 mm, the edge angle was 45°, and the length was 75 mm. To avoid damaging the radish, the digging depth of the shovel tip was 320 mm.
The loosening shovel reduces the pulling force by breaking the particle structure of the soil bed. Therefore, the coordination between the loosening time to the soil bed and the time to start to pull the radish is important, which is mainly determined by the relative position of the loosening shovel to the clamping wheels. As shown in Figure 14, the horizontal displacement between the shovel tip and the wheel center is defined as the installation position L. Figure 15 gives the variation of the maximum pulling force Fp max with the installation position L, with the forward speed of 0.2–0.4 m/s and the soil compactness of 3.0–4.0 MPa. Due to the disturbance of the loosening shovel to the soil bed, the bonding force between the soil particles and the radish is effectively broken, and the Fp max is rapidly reduced. As the installation position L moves forward, the loosening time to the soil bed increases, and the Fp max decreases more significantly. On the other hand, during the soil bed loosening process, the radish is subjected to an additional force in the forward direction. This force will increase with the increase of the installation position L and will affect the posture of the radish and the stability of the leaf gathering. So, a suitable installation position L should be in the range of 50–70 mm, and the maximum pulling force Fp max can be effectively reduced to less than 65 N.
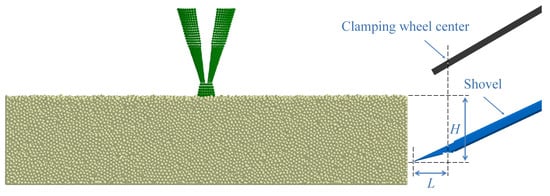
Figure 14.
Schematic diagram of relative position of loosening shovel and clamping wheels.
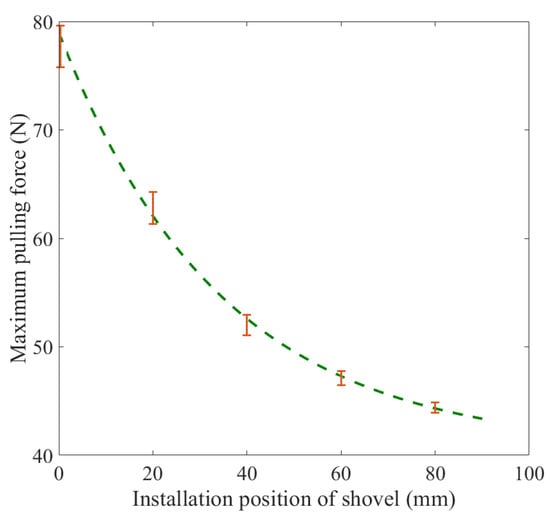
Figure 15.
Effect of shovel installation position on maximum pulling force.
3.5. Optimization of Parameters
According to the analysis results, the structure and operation parameters of the harvesting device were optimized. The dimensions of the harvester were 4030 mm × 1430 mm × 2435 mm, and the rated power was 53 kW. The forward speed can be adjusted in the range of 0–0.6 m/s. The angle between the frame of the harvesting device and the horizontal plane was about 30°. The engine power take-off shaft synchronously drove the clamping belt and chassis, and the linear speed ratio was 1:0.866. This ensured that the radish was pulled out vertically under different forward speeds, and the pulling angle could be controlled within ±5°. The depth of white radish fruit is generally in the range of 180~300 mm. To avoid fruit injury, the depth of the loosening shovel was designed to be 320 mm. The horizontal displacement between the shovel tip and the wheel center was 60 mm. The diameter of the clamping wheel was 90 mm, and its center height was about 100 mm above the soil bed. The clamping force of the belts was controlled by a set of springs, which was greater than 100 N. The length of the leaf gatherer was 550 mm, and the opening angle was 20°. The diameter of the leaf cutter was 180 mm, and the rotational speed was 300 rpm.
4. Experiment and Discussion
4.1. Pulling Performance Tests
To verify the accuracy of the DEM simulation results, the pulling performance tests were carried out in the laboratory using an electronic universal testing machine. Limited by the loading speed of the electronic universal testing machine, a 1:10 lever mechanism was used to achieve the pulling speed of 0–0.5 m/s. After burying the radish in loose soil, the soil bed was compacted evenly, and the compactness was measured using the TJSD-750 Soil Compaction Meter. A rope was used to tie the root of the radish leaves and the lever together. Driven by the moving beam of the electronic universal testing machine, the radish was pulled out, and the pulling force was recorded.
When the pulling speed is 0.1 m/s, Figure 16a gives the variation of pulling force under different soil bed compactness. Compared with the DEM simulation results in Figure 9, the pulling force did not suddenly increase to the maximum value. This is mainly because the rope tying the radish and the lever has a certain elasticity. The elastic deformation of the rope causes the pulling forces to reach their respective peaks at 0.3–0.4 s. When soil compactness was 1.47, 2.44, 3.15 and 4.09 MPa, the maximum pulling force quickly increased from 13.45, 44.25, 84.4 and 184.1 N, respectively. This change rule is basically consistent with the DEM simulation results. When the soil compactness was about 2.5 MPa, tests were carried out at different pulling speeds, and the results are shown in Figure 16b. As the pulling speed increased from 0.1 to 0.4 m/s, the maximum pulling force increased from 53.1 to 78.7 N, and the corresponding increase rate is about 48.2%. Similarly, when the pulling angle is increased from 0 to 10°, the increase rate of the maximum pulling force was about 32.4%.
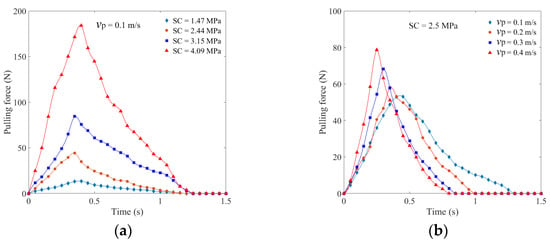
Figure 16.
Measurement results of pulling force: (a) effect of soil compactness; (b) effect of pulling speed.
4.2. Field Test Results
The white radish harvesting tests were repeated and carried out in different fields, as shown in Figure 17. The forward speed of the harvester varied between 0.18 and 0.47 m/s, and the corresponding pulling speed was about 0.1–0.27 m/s. The soil bed characteristics and harvest performance are shown in Table 2. As the soil bed compactness was less than 2.8 MPa, the required pulling force was less than 50 N, which is generally smaller than the leaf breaking force. Therefore, the loosening shovel was not installed during the harvesting operations, and the fruit was pulled out directly by clamping the leaves. The height of radish fruit outside the soil bed varies, which will change the position of the radish leaves clamped by the belt. When the clamping position is far away from the radish fruit, the leaf breaking force will decrease accordingly. This may result in some fruits not being pulled out and ending up missing in the field. With the increase of the forward speed, the radish pulling speed increased linearly. This increased the pulling force and led to an increase in the loss rate. Statistical results show that when the soil compaction was increased from 1.47 MPa to 2.21 MPa, the average loss rate increased from 0.68% to 1.75%. When the forward speed was increased from 0.18 to 0.47 m/s, the average loss rate increased from 1.08% to 1.30%. Overall, the maximum loss rate could be controlled below 2.0%.

Figure 17.
Harvesting performance tests in the field.
Table 2.
Soil bed characteristics and harvest performance.
The fruit damage is mainly generated by the leaf cutter during the fruit-leaf separation. When the clamping position is close to the radish fruit, it is easy to damage the fruit. In addition, the increase in pulling force will also have a certain influence on the stability of the radish pulling posture. Overall, the damage rate increased slightly with the increase in soil compactness and harvester forward speed. When the soil compaction was increased from 1.47 to 2.21 MPa and forward speed was increased from 0.18 to 0.47 m/s, the maximum damage rate could be controlled below 3.0%. Harvesting tests were also carried out in the field with SC of 3.6 MPa, although white radish planting in such environments was relatively rare. The pulling force increases exponentially with increasing SC. When the loosening shovel was not installed, a large number of radish leaves were pulled off, and the loss rate could exceed 15%. When the loosening shovel was installed to loosen the soil bed, the loss rate quickly reduced to less than 2.5%.
5. Conclusions
According to the statistical results of physical properties and growth state in the field, the pulling dynamic process of white radish was simulated using DEM, and the variation of the interaction force between the radish fruit and the soil bed was calculated using the EEPA contact model. Simulation results indicated that the soil bed compaction SC was the most important factor affecting the variation of pulling force Fp, and the maximum pulling force Fp max increased exponentially with the increase in soil bed compactness. With the increase in pulling speed and pulling angle, Fp increased monotonically. The DEM simulation results were verified by performance tests in the laboratory.
According to the pulling dynamic characteristics of white radish, the structure and operation parameters of the harvesting device were optimized, including clamping belt drive, clamping force, installation of loosening shovel, etc. The results of field harvesting performance tests indicated that when SC was less than 2.8 MPa, the maximum pulling force was less than the leaf breaking force. Therefore, it was feasible to pull out radishes directly by clamping their leaves, which could effectively reduce the power consumption of the harvester. In the soil bed with high SC, a loosening shovel was required to reduce the pulling force and thus reduce the loss rate due to leaf breakage, and the suitable installation position was 50–70 mm in front of the center of the clamping wheels. Then, the power drive system, clamping structure and operation parameters of the harvesting device were designed. With SC of 1.47–2.21 MPa and a forward speed of 0.18–0.47 m/s, White radish harvesting experiments were carried out. The results indicated that the performance is stable, and the loss rate and damage rate could be controlled below 2.0% and 3.0%, respectively.
Author Contributions
Conceptualization, K.Y. and Z.Z.; methodology, K.Y. and Y.H.; software, K.Y. and S.Y.; data Curation, K.Y. and Y.H.; writing—original draft preparation, K.Y. and S.Y.; writing—review and editing, Z.Z. All authors have read and agreed to the published version of the manuscript.
Funding
This work was supported by the National Natural Science Foundation of China (Grant No. 51775246), Agricultural Science and Technology Innovation Project of Jiangsu Province (Grant No. CX(22)3090), Modern Agricultural Machinery Equipment and Technology Demonstration Project of Jiangsu Province (Grant No. NJ2019-16), and the Research Project for Professional Leaders of Higher Vocational Colleges in Jiangsu Province (Grant No. 2022GRGDYX108).
Institutional Review Board Statement
Not applicable.
Data Availability Statement
Not applicable.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Cha, K.; Son, M.; Hong, S.; An, S.; Part, S. Method to assess water footprint, a case study for white radishes in Korea. Int. Soil Water Conserv. 2017, 5, 151–157. [Google Scholar] [CrossRef]
- Apidet, R.; Gholamreza, K.; Meike, B.; Carl, E.O.; Supaart, S. Metabolic changes and increased levels of bioactive compounds in white radish (Raphanus sativus L. cv. 01) sprouts elicited by oligochitosan. Agronomy 2019, 9, 467. [Google Scholar]
- Hong, H.; Lee, J.; Chae, W. An economic method to identify cultivars and elite lines in radish (Raphanus sativus L.) for small seed companies and independent breeders. Horticulturae 2023, 9, 140. [Google Scholar] [CrossRef]
- Park, C.H.; Ki, W.; Kim, N.S.; Park, S.-Y.; Kim, J.K.; Park, S.U. Metabolic profiling of white and green radish cultivars (Raphanus sativus). Horticulturae 2022, 8, 310. [Google Scholar] [CrossRef]
- Lu, J.; Miao, M.; Miao, X.B.; Shi, W.W.; Ye, D.B.; Lu, S.Y. Research and experiment on the harvesting machine of white radish. J. Chin. Agric. Mech. 2016, 37, 57–60. [Google Scholar]
- Wang, J.; Du, D.D.; Hu, J.B.; Zhu, J.X. Vegetable mechanized harvesting technology and its development. Trans. CSAM 2014, 45, 81–87. [Google Scholar]
- Zeng, G.J.; Chen, J.N.; Xia, X.D.; Ye, J. Design and experiment on pull type of tassel fruit separation for carrot. Trans. CSAM 2018, 49, 73–79. [Google Scholar]
- Han, T.; Jiang, Y.M.; Wang, J.W.; Guan, R.; Zhou, W.Q. Bionic design and parameter optimization of rotating and fixed stem- and leaf-cutting devices for carrot combine harvesters. Math. Probl. Eng. 2021, 2021, 8873965. [Google Scholar]
- Leszczynski, N. The influence of working parameters of a carrot harvester on carrot root danage. Maint. Reliab. 2011, 49, 35–41. [Google Scholar]
- Xia, X.; Xu, Z.; Yu, C.; Zhou, Q.; Chen, J. Finite element analysis and experiment of the bruise behavior of carrot under impact loading. Agriculture 2021, 11, 471. [Google Scholar] [CrossRef]
- Liu, Q.; Xu, L.F.; Liu, X.X.; Lv, Z.Q.; Song, Y.P.; Li, C.P. Research on dynamic behavior during mechanic pulling of carrot based on distinct element method. J. Chin. Agric. Mech. 2018, 39, 61–65. [Google Scholar]
- Aikins, K.A.; Ucgul, M.; Barr, J.B.; Awuah, E.; Antille, D.L.; Jensen, T.A.; Desbiolles, J.M.A. Review of discrete element method simulations of soil tillage and furrow opening. Agriculture 2023, 13, 541. [Google Scholar] [CrossRef]
- Ucgul, M.; Saunders, C.; Fielke, J.M. Comparison of the discrete element and finite element methods to model the interaction of soil and tool cutting edge. Biosyst. Eng. 2018, 169, 199–208. [Google Scholar] [CrossRef]
- Mak, J.; Chen, Y.; Sadek, M.A. Determining parameters of a discrete element model for soil–tool interaction. Soil Till. Res. 2012, 118, 117–122. [Google Scholar] [CrossRef]
- Zhao, Z.; Li, Y.; Liang, Z.; Gong, Z. DEM simulation and physical testing of rice seed impact against a grain loss sensor. Biosyst. Eng. 2013, 116, 410–419. [Google Scholar]
- Liu, R.; Liu, L.; Li, Y.; Liu, Z.; Zhao, J.; Liu, Y.; Zhang, X. Numerical simulation of seed-movement characteristics in new maize delivery device. Agriculture 2022, 12, 1944. [Google Scholar] [CrossRef]
- Ma, Z.; Li, Y.; Xu, L.; Chen, J.; Zhao, Z.; Tang, Z. Dispersion and migration of agricultural particles in a variable-amplitude screen box based on the discrete element method. Comput. Electron. Agric. 2017, 142, 173–180. [Google Scholar] [CrossRef]
- Horabik, J.; Molenda, M. Parameters and contact models for DEM simulations of agricultural granular materials: A review. Biosyst. Eng. 2016, 147, 206–225. [Google Scholar] [CrossRef]
- Yan, D.; Yu, J.; Wang, Y.; Zhou, L.; Tian, Y.; Zhang, N. Soil particle modeling and parameter calibration based on discrete element method. Agriculture 2022, 12, 1421. [Google Scholar] [CrossRef]
- Foroutan, T.; Mirghasemi, A.A. Use of CFD-DEM to evaluate the effect of intermediate stress ratio on the undrained behaviour of granular materials. Adv. Powder Technol. 2022, 33, 103507. [Google Scholar] [CrossRef]
- Ren, D.; Yu, H.; Zhang, R.; Li, J.; Zhao, Y.; Liu, F.; Zhang, J.; Wang, W. Research and experiments of hazelnut harvesting machine based on CFD-DEM analysis. Agriculture 2022, 12, 2115. [Google Scholar] [CrossRef]
- Wang, X.; Zhou, H.; Ji, J. Effect of mounting angle on bending subsoiling tool–soil interactions using DEM simulations. Agriculture 2022, 12, 1830. [Google Scholar] [CrossRef]
- Janda, A.; Ooi, J.Y. DEM modeling of cone penetration and unconfined compression in cohesive solids. Powder Technol. 2016, 293, 60–68. [Google Scholar] [CrossRef]
- Mohajeri, M.J.; Do, H.Q.; Schott, D.L. DEM calibration of cohesive material in the ring shear test by applying a genetic algorithm framework. Adv. Powder Technol. 2020, 31, 1838–1850. [Google Scholar] [CrossRef]
- Zhao, Z.; Li, H.C.; Liu, J.K.; Yang, S.X. Control method of seedbed compactness based on fragment soil compaction dynamic characteristics. Soil Till. Res. 2020, 198, 104551. [Google Scholar] [CrossRef]
- Sun, L.; Zhang, X.; Zeng, Q.; Gao, K.; Jiang, K. Application of a screw conveyor with axial tilt blades on a shearer drum and investigation of conveying performance based on DEM. Particuology 2022, 61, 91–102. [Google Scholar] [CrossRef]
- Thakur, S.C.; Ooi, Y.J.; Ahmadian, H. Scaling of discrete element model parameters for cohesionless and cohesive solid. Powder Technol. 2016, 293, 130–137. [Google Scholar] [CrossRef]
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).