
Research on Integrated Navigation System of Agricultural Machinery Based on RTK-BDS/INS

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. RTK-BDS/INS Integrated Navigation System
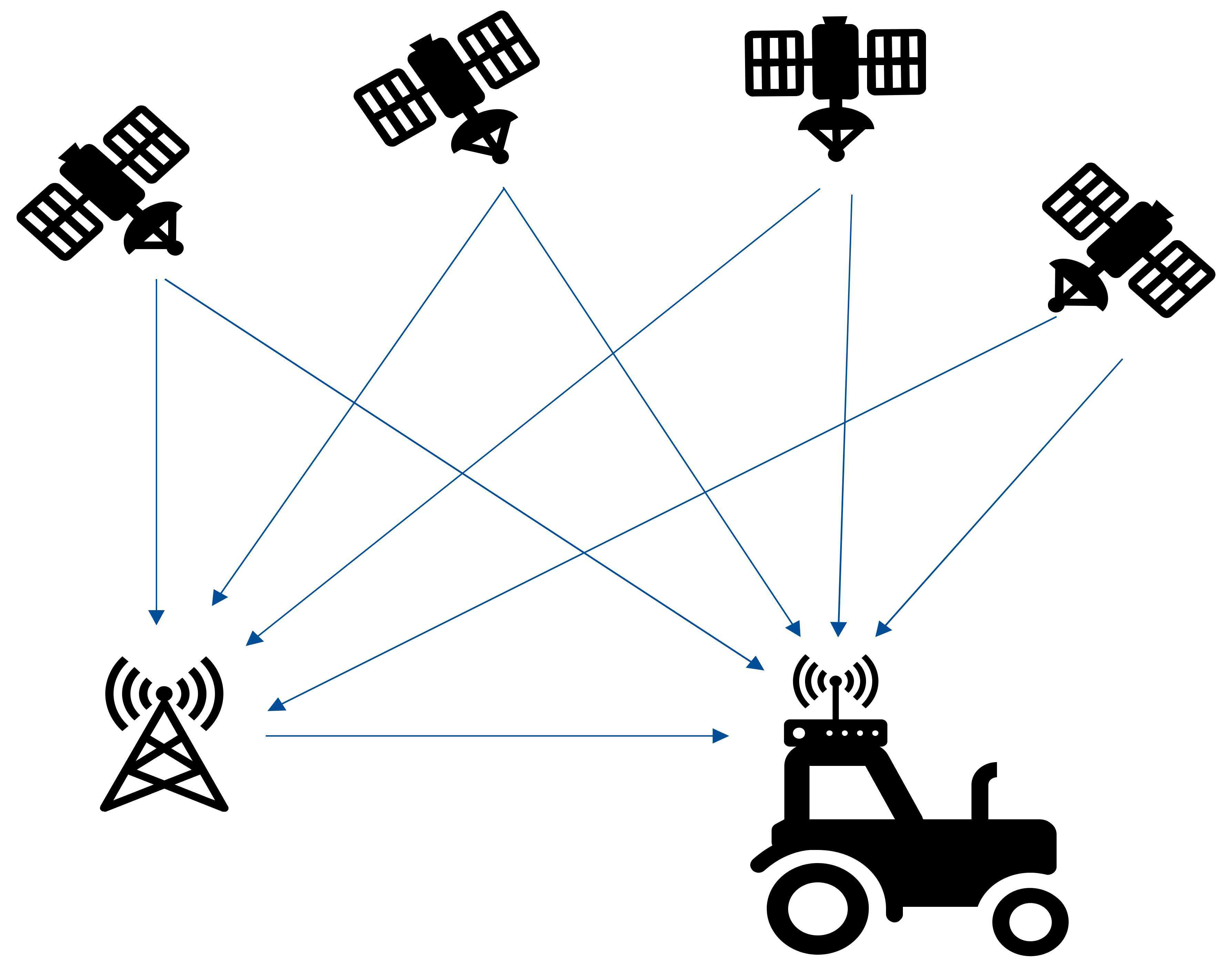
2.1. RTK-BDS
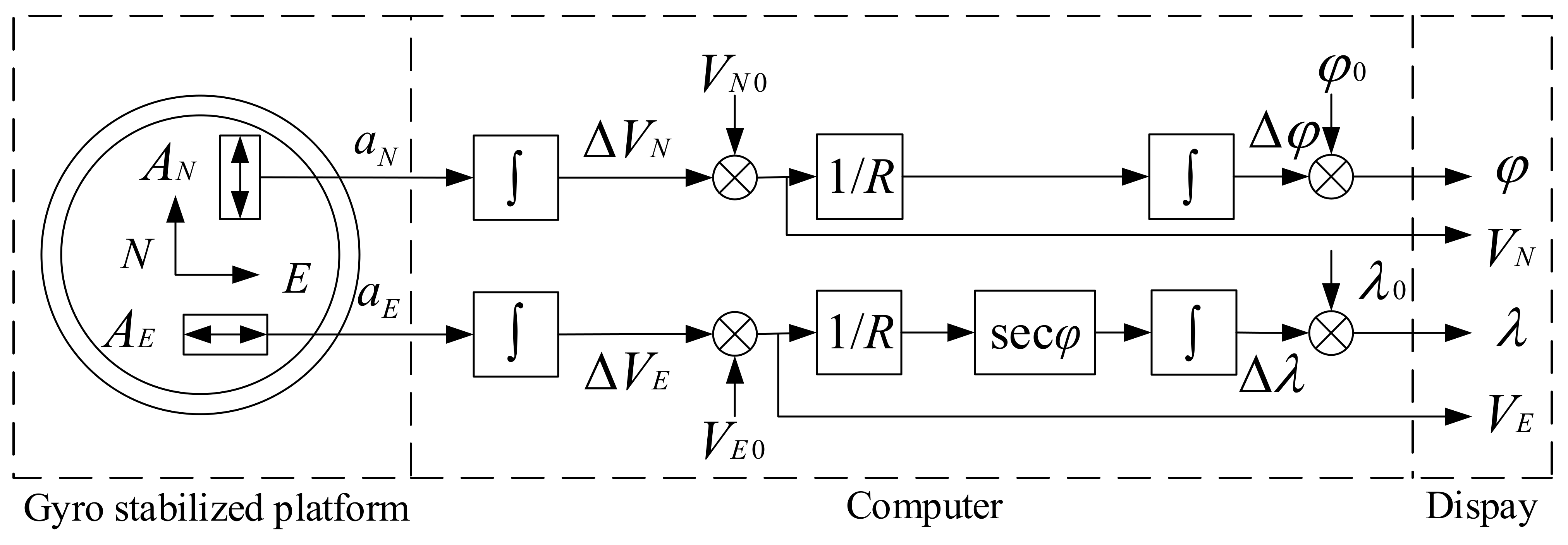
2.2. Inertial Navigation System
2.3. Design of the Integrated Navigation System
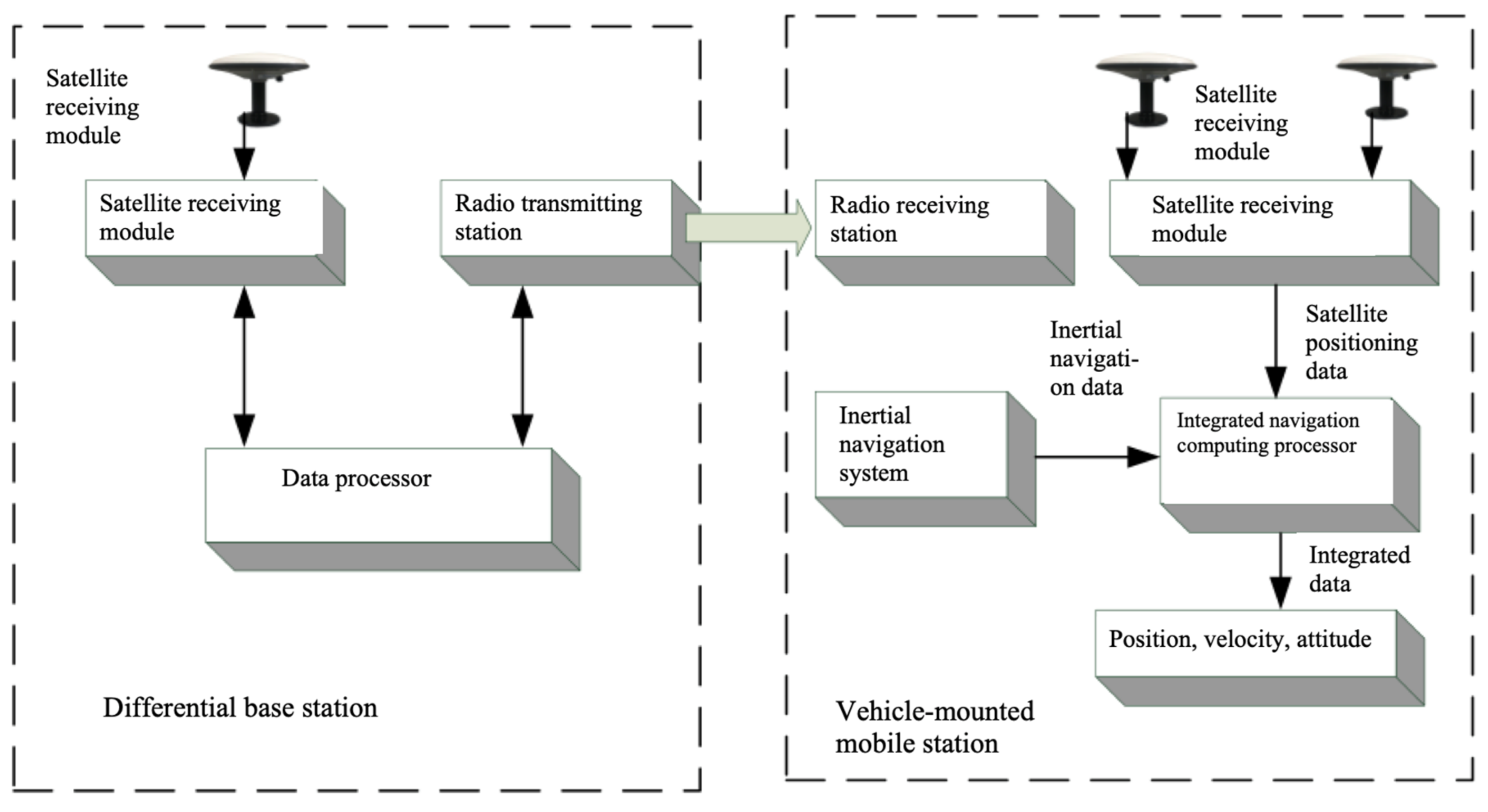
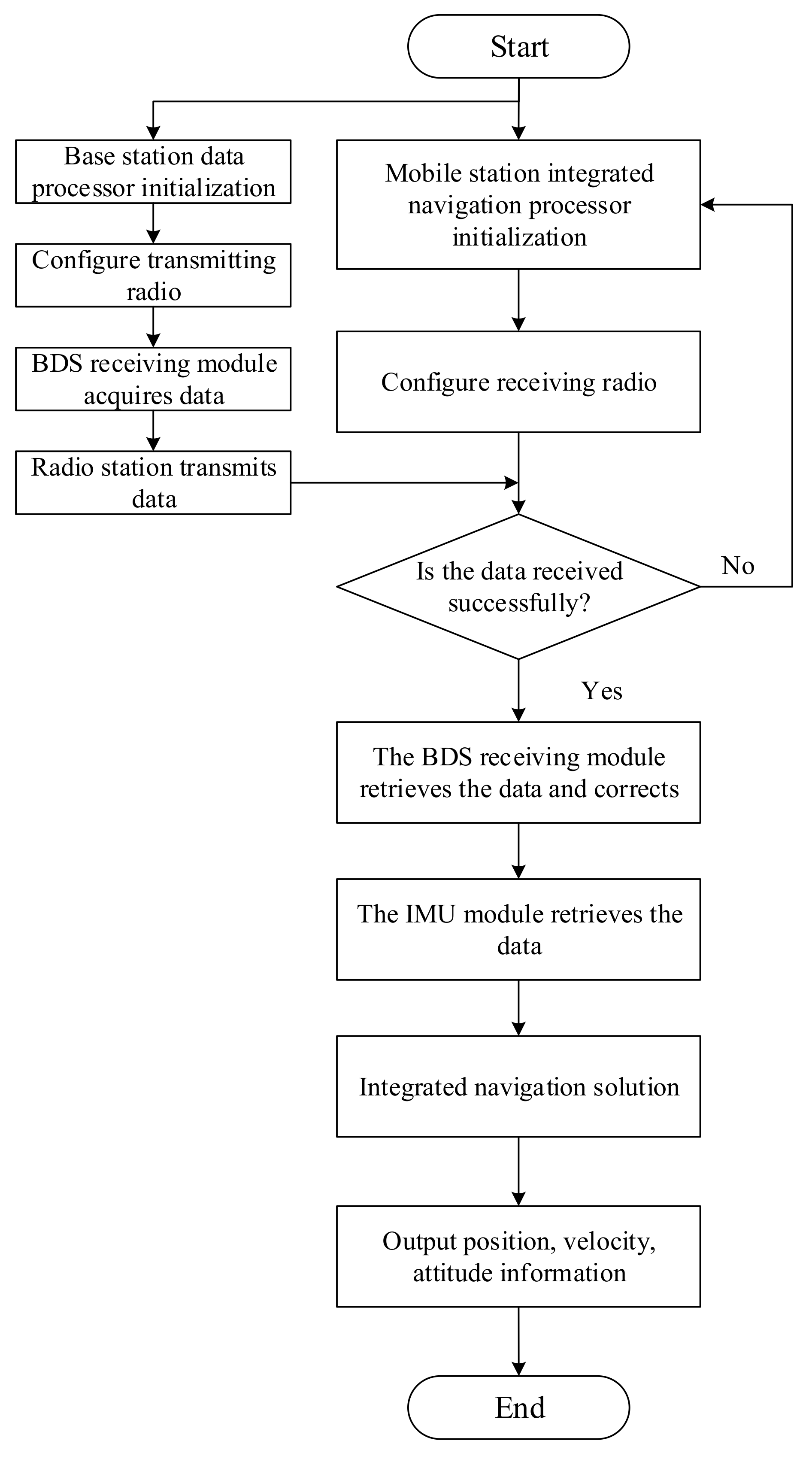
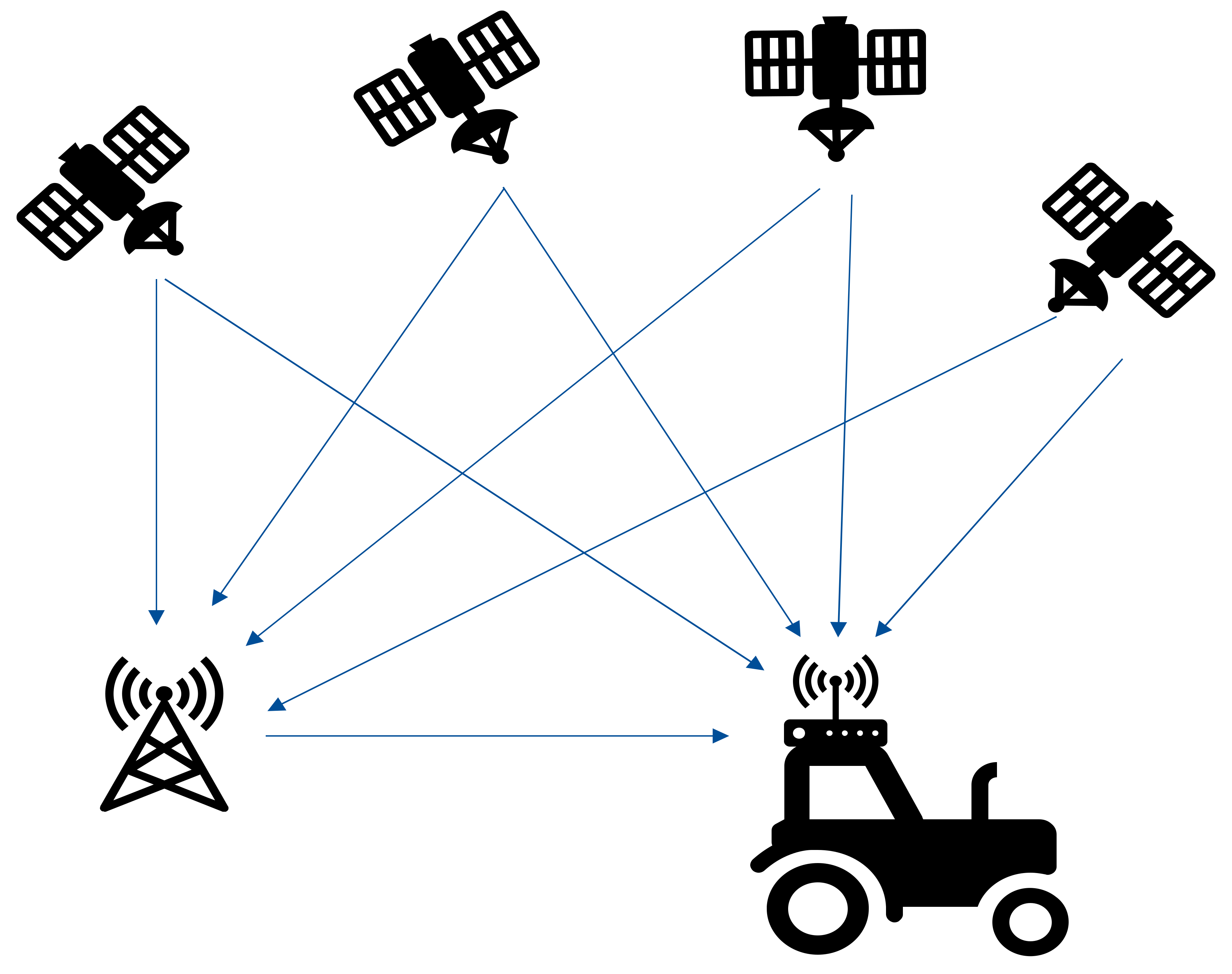
2.3.1. Integrated Navigation System Architecture
2.3.2. Data Fusion Algorithm
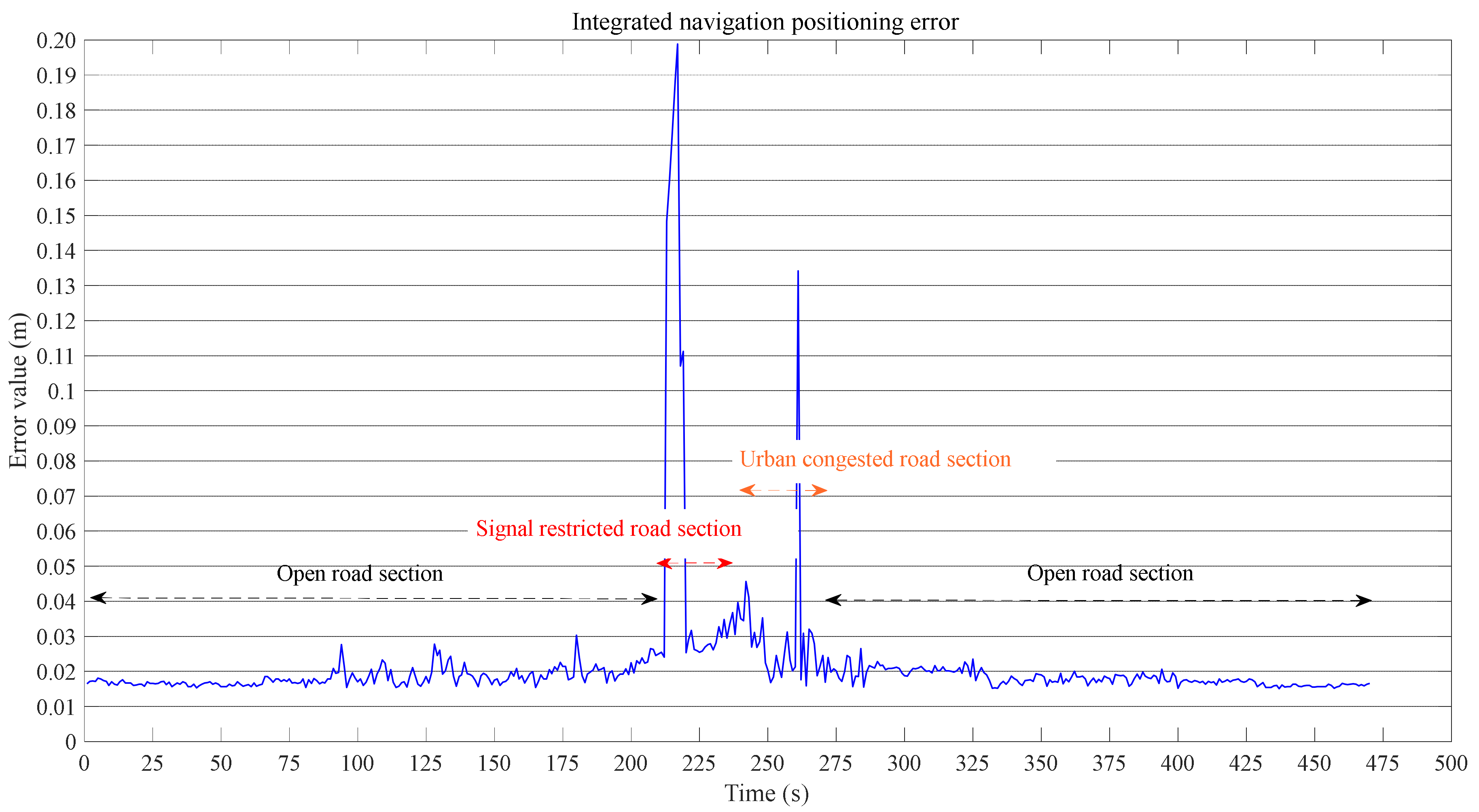
3. Experimental Verification
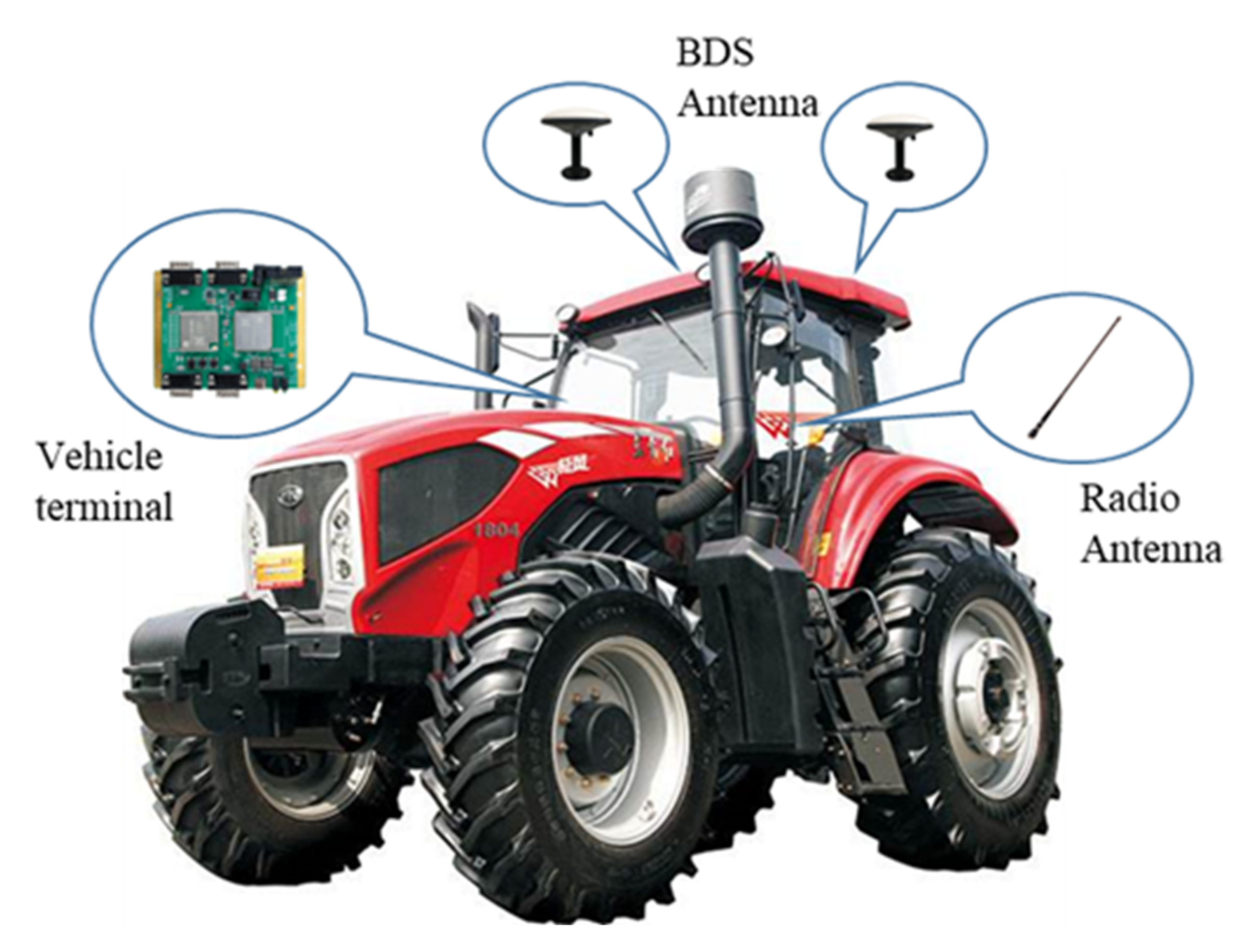
3.1. Experiment Platform
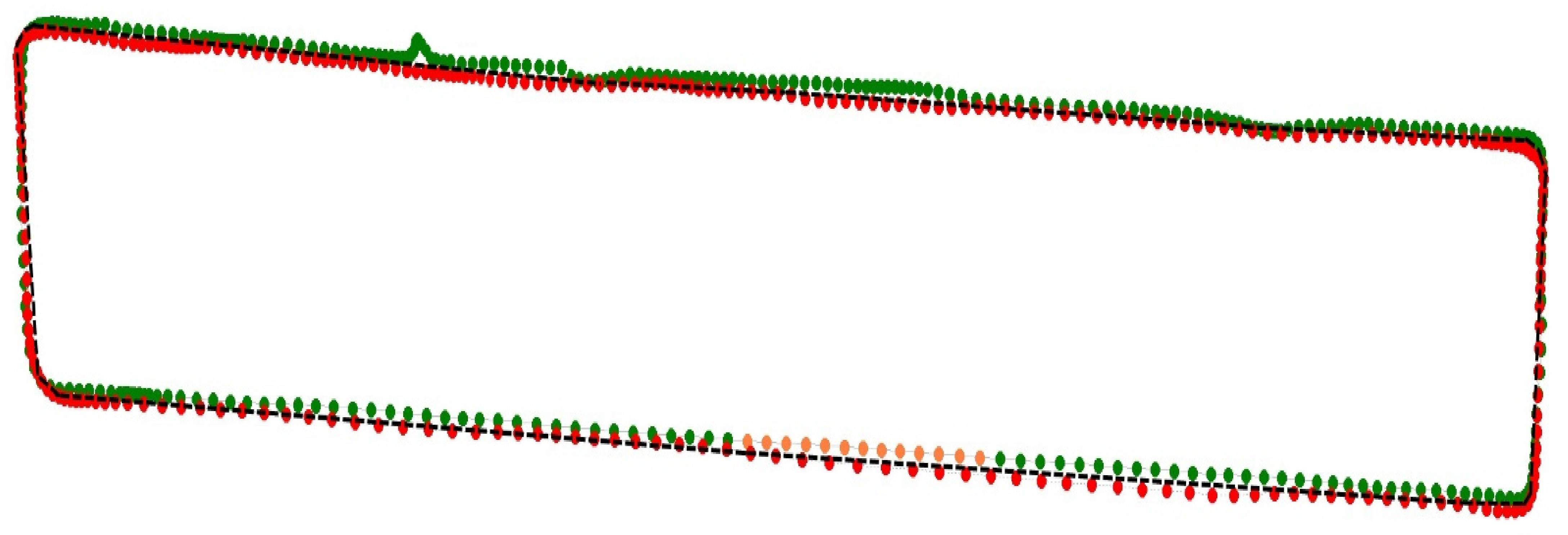
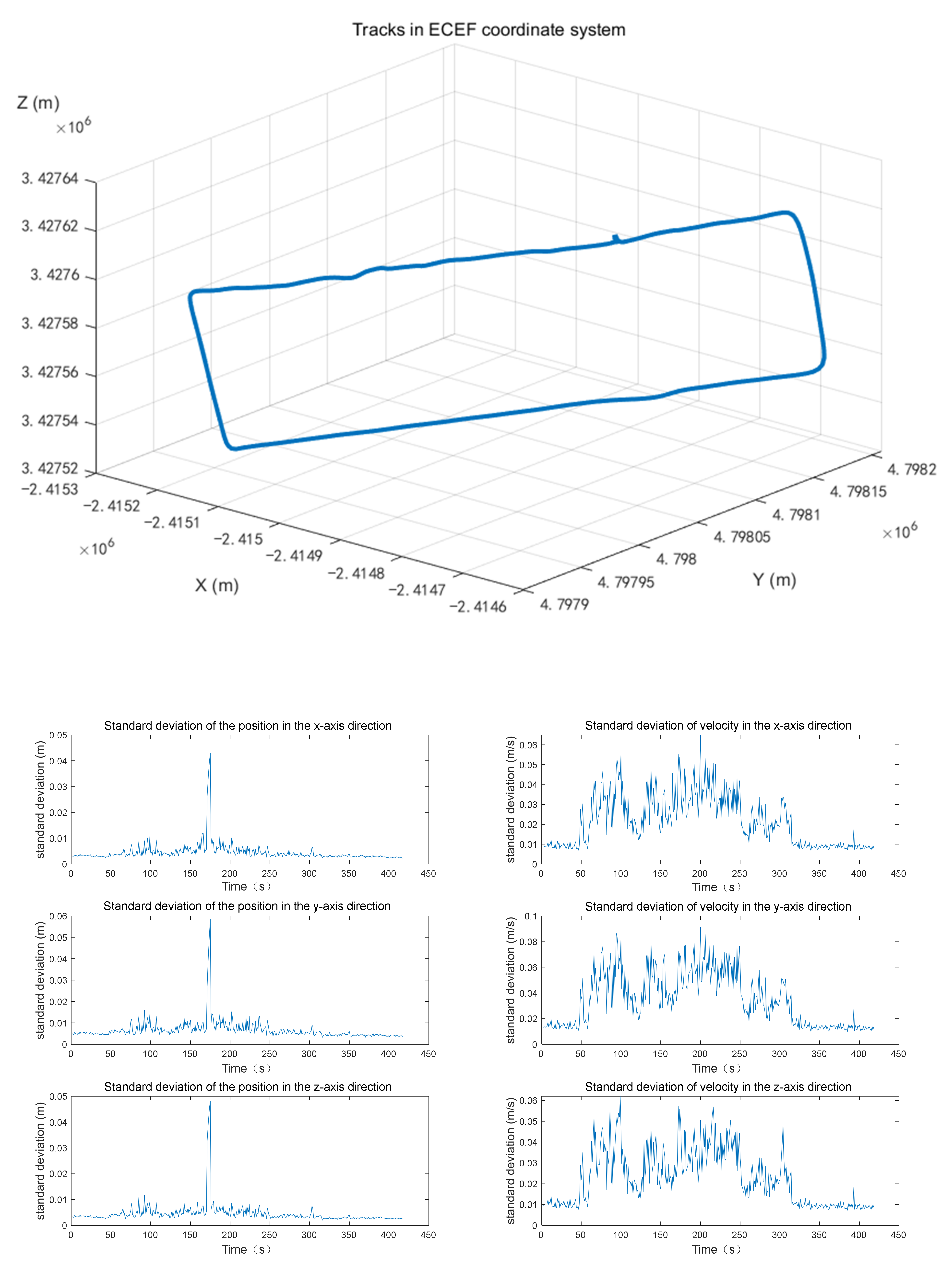
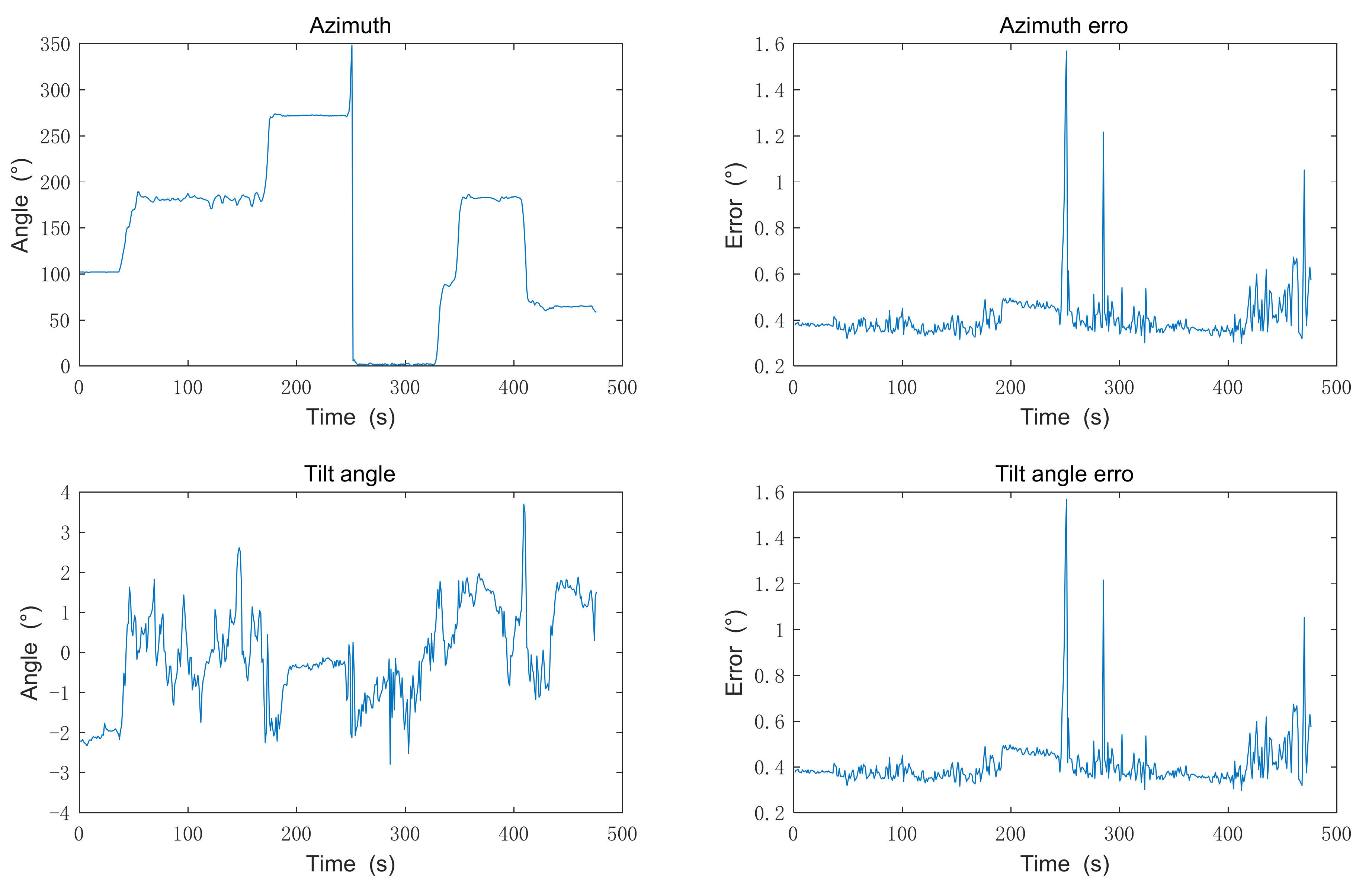
3.2. Experiment
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- RShamshiri, R.; Weltzien, C.; Hameed, I.A.; JYule, I.; EGrift, T.; Balasundram, S.K.; Pitonakova, L.; Ahmad, D.; Chowdhary, G. Research and development in agricultural robotics: A perspective of digital farming. Int. J. Agric. Biol. Eng. 2018, 11, 1. [Google Scholar]
- Ayerdi Gotor, A.; Marraccini, E.; Leclercq, C.; Scheurer, O. Precision Farming Uses Typology in Arable Crop-Oriented Farms in Northern France. Precis. Agric. 2020, 21, 131–146. [Google Scholar] [CrossRef]
- Gebbers, R.; Adamchuk, V.I. Precision agriculture and food security. Science 2010, 327, 828–831. [Google Scholar] [CrossRef] [PubMed]
- Mungwongsa, A.; Saengprachatanarug, K.; Radpukdee, T. Design of an Automatic Steering System in a Small Farm Tractor. In Proceedings of the 2018 21st International Symposium on Wireless Personal Multimedia Communications (WPMC), Chiang Rai, Thailand, 25–28 November 2018; pp. 224–229. [Google Scholar]
- Yu, G.R.; Bai, K.Y.; Chen, M.C. Applications of Taguchi method to fuzzy control for path tracking of a wheeled mobile robot. In Proceedings of the 2018 IEEE International Conference on Applied System Innovation (ICASI), Chiba, Japan, 13–17 April 2018; pp. 453–456. [Google Scholar]
- Gao, F.Y.; Wang, Z.; Bai, X.P.; Xi, W.L. Design of Row Guidance Control System for Combine Corn Harvester. In Proceedings of the 2019 2nd International Conference on Information Systems and Computer Aided Education (ICISCAE), Dalian, China, 28–30 September 2019; pp. 354–358. [Google Scholar]
- Nam, K.; Oh, S.; Fujimoto, H.; Hori, Y. Robust yaw stability control for electric vehicles based on active front steering control through a steer-by-wire system. Int. J. Automot. Technol. 2012, 13, 1169–1176. [Google Scholar] [CrossRef]
- Takai, R.; Yang, L.L.; Noguchi, N. Development of a crowler-type robot tractor using RTK-GPS and IMU. Engineering in Agriculture. Environ. Food 2014, 7, 143–147. [Google Scholar]
- Backman, J.; Oksanen, T.; Visala, A. Navigation system for agricultural machines: Nonlinear model predictive path tracking. Comput. Electron. Agric. 2012, 82, 32–43. [Google Scholar] [CrossRef]
- Krüger, G.; Springer, R.; Lechner, W. Global navigation satellite systems (GNSS). Comput. Electron. Agric. 1994, 11, 3–21. [Google Scholar] [CrossRef]
- Ponnambalam, V.R.; Bakken, M.; Moore, R.J.D.; Gjevestad, J.G.O.; From, P.J. Autonomous Crop Row Guidance Using Adaptive Multi-ROI in Strawberry Fields. Sensors 2020, 20, 5249. [Google Scholar] [CrossRef]
- Titterton, D.H.; Weston, J.L. Strapdown Inertial Navigation Technology Aerospace & Electronic Systems Magazine; IEEE: Piscataway, NJ, USA, 2004. [Google Scholar] [CrossRef]
- Tazartes, D. An historical perspective on inertial navigation systems. In Proceedings of the 2014 International Symposium on Inertial Sensors and Systems (ISISS), Laguna Beach, CA, USA, 25–26 February 2014; pp. 1–5. [Google Scholar]
- Qin, Y.-Y. Inertial Navigation; Science Press: Beijing, China, 2006. [Google Scholar]
- Draper, C. Control, navigation and guidance. IEEE Control Syst. Mag. 1981, 1, 4–17. [Google Scholar] [CrossRef]
- Li, K.; Gao, P.Y. Research on self-calibration technique for hybrid inertial navigation system. Chin. J. Sci. Instrum. 2019, 40, 9–17. [Google Scholar]
- Li, J.; Guo, S.; Cui, G.; Chen, C. Polar underwater calibration for strapdown inertial navigation system. Chin. J. Sci. Instrum. 2018, 39, 51–58. [Google Scholar]
- Zhang, M.; Ji, Y.; Li, S.; Cao, R.; Xu, H.; Zhang, Z. Research Progress of Agricultural Machinery Navigation Technology. Trans. Chin. Soc. Agricult. Machin. 2020, 51, 1–18. [Google Scholar] [CrossRef]
- Wang, T.; Chen, B.; Zhang, Z.; Li, H.; Zhang, M. Applications of machine vision in agricultural robot navigation: A review. Comput. Electron. Agric. 2022, 198, 107085. [Google Scholar] [CrossRef]
- Landau, H.; Chen, X.; Klose, S.; Leandro, R.; Vollath, U. Trimble’s RTK and DGPS solutions in comparison with precise point positioning, observing our changing earth. In Proceedings of the International association of Geodesy Symposia, Perugia, Italy, 2–13 July 2007; pp. 709–718. [Google Scholar]
- Groves, P.D.; Wang, L.; Walter, D.; Martin, H.; Voutsis, K.; Jiang, Z. The four key challenges of advanced multisensor navigation and positioning. In Proceedings of the IEEE/ION PLANS, Monterey, CA, USA, 5–8 May 2014; pp. 773–792. [Google Scholar]
- Li, X.; Wang, X.; Liao, J.; Li, X.; Li, S.; Lyu, H. Semi-tightly coupled integration of multi-GNSS PPP and S-VINS for precise positioning in GNSS challenged environments. Satell. Navig. 2021, 2, 1. [Google Scholar] [CrossRef]
- Bakker, T.; van Asselt, K.; Bontsema, J.; Müller, J.; van Straten, G. Autonomous navigation using a robot platform in a sugarbeet field. Biosyst. Eng. 2011, 109, 357–368. [Google Scholar] [CrossRef]
- Maseila, E.; Gonthier, M.; Dumaine, M. Precise kinematic positioning experimentswith a low-cost RTK GPS engine. In Proceedings of the IEEE 1998 Position Location and Navigation Symposium, Palm Springs, CA, USA, 20–23 April 1998; pp. 250–255. [Google Scholar]
- Kise, M.; Noguchi, N.; Ishii, K.; Terao, H. Development of agricultural autonomous tractorwith an RTK-GPS and a FOG. In Proceedings of the IFAC Proceedings Series, Berkeley, CA, USA, 9–11 December 2002; pp. 99–104. [Google Scholar]
- Zhang, M.; Yin, W.L.; Lin, X.; Lü, X. Method for Calculating Navigation Parameter Via RTK-DGPS Fusing Inertial Sensor for Agricultural Vehicle. Trans. Chin. Soc. Agric. Mach. 2015, 40, 7–12. [Google Scholar]
- Yuan, Y.; Mi, X.; Zhang, B. Initial assessment of single- and dual-frequency BDS-3 RTK positioning. Satell Navig. 2020, 1, 37. [Google Scholar] [CrossRef]
- Zhao, Q.; Guo, J.; Wang, C.; Lyu, Y.; Xu, X.; Yang, C.; Li, J. Precise orbit determination for BDS satellites. Satell Navig. 2022, 3, 2. [Google Scholar] [CrossRef]
- Zhang, Y.; Kubo, N.; Chen, J.; Wang, J.; Wang, H. Initial Positioning Assessment of BDS New Satellites and New Signals. Remote Sens. 2019, 11, 1320. [Google Scholar] [CrossRef] [Green Version]
- Pan, L.; Li, X.; Yu, W.; Dai, W.; Kuang, C.; Chen, J.; Chen, F.; Xia, P. Performance Evaluation of Real-Time Precise Point Positioning with Both BDS-3 and BDS-2 Observations. Sensors 2020, 20, 6027. [Google Scholar] [CrossRef]
- Xiong, B.; Zhang, J.; Qu, F.; Fan, Z.; Wang, D.; Li, W. Navigation Control System for Orchard Spraying Machine Based on Beidou Navigation Satellite System. Trans. Chin. Soc. Agric. Mach. 2017, 48, 45–50. [Google Scholar]
- Wang, J.; Zhao, B.; Zhao, S.; Xing, G.; Wei, L.; Hu, X. Design and test of the BDS navigation system for trenchless pipe laying machines. Trans. Chin. Soc. Agric. Eng. (Trans. CSAE) 2021, 37, 47–54. (In Chinese) [Google Scholar] [CrossRef]
- Sun, H.; Slaughter, D.C.; Ruiz, M.P.; Gliever, C.; Upadhyaya, S.K.; Smith, R.F. RTK GPS mapping of transplanted row crops. Comput. Electron. Agric. 2010, 71, 32–37. [Google Scholar] [CrossRef]
- Gan-Mor, S.; Clark, R.L.; Upchurch, B.L. Implement lateral position accuracy under RTK-GPS tractor guidance. Comput. Electron. Agric. 2007, 59, 31–38. [Google Scholar] [CrossRef]
- Bell, T. Automatic tractor guidance using carrier-phase differential GPS. Comput. Electron. Agric. 2000, 25, 53–66. [Google Scholar] [CrossRef]
- Ashby, N. Relativity in the Global Positioning System. Living Rev. Relativ. 2003, 6, 1. [Google Scholar] [CrossRef] [Green Version]










Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Huang, Y.; Fu, J.; Xu, S.; Han, T.; Liu, Y. Research on Integrated Navigation System of Agricultural Machinery Based on RTK-BDS/INS. Agriculture 2022, 12, 1169. https://doi.org/10.3390/agriculture12081169
Huang Y, Fu J, Xu S, Han T, Liu Y. Research on Integrated Navigation System of Agricultural Machinery Based on RTK-BDS/INS. Agriculture. 2022; 12(8):1169. https://doi.org/10.3390/agriculture12081169
Chicago/Turabian StyleHuang, Yourui, Jiahao Fu, Shanyong Xu, Tao Han, and Yuwen Liu. 2022. "Research on Integrated Navigation System of Agricultural Machinery Based on RTK-BDS/INS" Agriculture 12, no. 8: 1169. https://doi.org/10.3390/agriculture12081169
APA StyleHuang, Y., Fu, J., Xu, S., Han, T., & Liu, Y. (2022). Research on Integrated Navigation System of Agricultural Machinery Based on RTK-BDS/INS. Agriculture, 12(8), 1169. https://doi.org/10.3390/agriculture12081169