1. Introduction
Image completion (a.k.a. image inpainting or image hole-filling) aims at synthesizing alternative structures and textures that visually realistic contents in the missing or damaged regions of an image. It is essential in many image editing tasks and has aroused wide interest in the computer vision and graphic community as it can be used for repairing damaged photographs or filling in holes left after removing the distracting objects from an image. It can also be extended to problems such as digital effect (e.g., object removal), image restoration (e.g., scratch or text removal in photograph), image coding and transmission (e.g., recovery of the missing blocks), rotation, stitching, retargeting, recomposition, super-resolution and many others. Therefore, the generated contents should either be as accurate as the original image, or simply fit well within the context such that the modification appears to be visually natural, photorealistic and semantically correct.
In general, image completion can be divided into two categories: generic scene image completion and specific image completion (e.g., human faces). Due to the well-known compositionality and reusability of visual patterns, missing regions in the former usually have a high chance of finding similar patterns in either the surrounding context of the same image or images in an external dataset subject to the context. However, the latter cases are more specific, especially when a large essential portion of an image is missing. The objective of image completion should be not only photorealistic but also semantically consistent with the surrounding image context at different scales. First, structural features should remain connected inside the missing region or across its boundary. Second, colorization should be plausible and spatially coherent that could potentially fool a human observer. Third, textures filled within the missing region should contain high-frequency details. In addition, missing object parts need to be recovered correctly, which is challenging and requires capturing high-level semantics.
The core challenge of image completion problems lies in the inherent ambiguity of this ill-posed inverse problem and synthesizing content with reasonable details for the missing regions that are often not coherent with the surrounding areas. The main reason is that modeling the pixel distribution is difficult and the trained models easily introduce blurry components and artifacts when the dimensionality becomes very high. Therefore, sufficient prior information is required to achieve meaningful and visually believable results.
There have been a number of studies attempting to solve this problem. These studies fall into two groups: data similarity driven methods with low-level features and data distribution based generative ones. Broadly speaking, methods in the first group can be classified into two categories: diffusion-based methods [
1,
2,
3,
4,
5] and patch-based methods [
6,
7,
8,
9,
10,
11,
12,
13,
14]. Diffusion-based methods solve Partial Differential Equations (PDE) [
1] or similar diffusion systems, so as to diffuse the information from the known region into the missing region at the pixel level. They have achieved convincingly excellent results for filling narrow or small holes. However, they tend to introduce smooth effects in the textured region or larger missing region. Patch-based methods are capable of recovering large missing regions by copying suitable textures in the known contexts and then pasting them into the missing region from low-resolution to high-resolution at patch level. They can synthesize plausible stationary textures and perform particularly well in background completion tasks (e.g., grass, sky and mountain), and are widely deployed in practical applications [
11]. However, this copy and paste strategy assumes that the missing patches can be found somewhere in the same image; it cannot hallucinate novel image contents for challenging cases where the missing region involves complex and non-repetitive structures (e.g., multiple textures meeting at the border of the missing region). Moreover, although such methods are good at propagating high-frequency texture details, they are not able to capture high-level semantics or global structures of the missing region. Furthermore, matching patch is a computationally expensive operation. An alternative is the data-driven method [
15], which retrieves plausible patches from a large database based on context similarity to repair a damaged image. This method assumes that the regions surrounded by similar context likely posses similar content. It is very effective when it finds an example image with sufficient visual similarity to the query and is often utilized for generic scene completion. However, it is bound to fail when no similar exemplars can be found in either the context or the external database. This limitation greatly restricts its possible application scenarios.
Not only is it necessary to complete textured patterns, it is also important to understand the anatomy of the scenes and objects being completed. Instead of seeking similar patches, the methods in the second group learn the underlying distribution governing the data generation with respect to the context. More recently, much progress has been made [
16,
17,
18,
19,
20,
21,
22,
23] in this direction due to the resurgence of deep learning [
24], especially the generative adversarial networks (GANs) [
25]. In this paradigm, image completion has been formulated as a conditional image generation problem and solved with GANs which introduce the concept of adversarial learning between a generator and a discriminator. These learning-based methods are able to hallucinate novel contents in the missing region by training on a large scale dataset.
However, most of the learning-based methods assume that the generative models can implicitly predict or understand the structure and semantic priors in the image, without explicitly modeling them in the learning process. Unfortunately, this strategy often struggles to reconstruct high frequency details in the generated regions accurately. This is mainly because the distribution of natural images is very complex and it is difficult to model this distribution directly at the pixel level. Thus, neither structural continuity nor texture consistency can be guaranteed between the missing region and the remaining image context. How, then, should we guide an image completion method generating coherent structures and fine details in the missing region?
Inspired by the image-to-image translation [
26,
27], we propose an universal image completion framework called PIC-EC: parallel image completion networks with edge and color priors, which explicitly provides image edge and color maps as the prior knowledge for image completion. PIC-EC decouples the image completion problem into three relatively easy sub-problems that can be modeled using the GANs. The edge and color maps should be restored firstly because they have also been lost in the missing region. Edge and color maps recovery is a relatively easier task than image completion. Secondly, the restored edge and color maps can be used as the priors for the following image completion. Therefore, PIC-EC is a two-stage model that can be summarized into three parts: edge map recovery, color map recovery and fine details completion. During the first two parts, edge and color generators provide basic structure and elements information. In the last part, the missing regions are gradually refined with fine details, laying on increasingly intense layers of color, which add lights and shadow.
The proposed method is evaluated on two standard datasets CelebA-HQ [
28] and Paris StreetView [
29]. We compare the performance of our method against current state-of-the-art methods in terms of qualitative and quantitative. This paper makes the following contributions:
The image completion problem is decoupled into three sub-problems that can be modeled using the GANs.
A novel image completion framework named PIC-EC that combines edge and color maps to fill in the missing regions exhibiting fine details.
Edge and color generators capable of hallucinating sparse edge and flat color maps in the missing regions given the surrounding context.
An end-to-end trainable network that combines edge and color generation with image completion to generate fine details in missing regions.
The remaining parts of this paper proceeds as follows. Relevant research background is introduced in
Section 2.
Section 3 presents the details of the proposed PIC-EC method. Experiments are carried out and analyzed in
Section 4 to demonstrate the effectiveness of the PIC-EC method.
Section 5 reviews and discusses experimental results, and, in
Section 6, we conclude the paper with a summary of key points.
2. Related Works
A variety of different methods have been proposed for the image completion task. These methods can be roughly divided into two mainstreams: traditional methods based on pixel propagation or patch matching, and recent methods based on deep neural networks. The first mainstream includes diffusion-based [
1,
2,
3,
4,
5] and patch-based methods [
6,
7,
11]. Diffusion-based methods synthesize textures by propagating the neighborhood region appearance to the missing region and are well founded on the PDE [
1] theory and quite effective for small or narrow holes such as scratches found commonly in old photographs. However, they tend to introduce significant visual artifacts in the textured region and fail to recover meaningful contents in larger missing regions due to the lack of semantic texture or structure synthesis.
In contrast to the diffusion-based methods, patch-based ones fill in the missing regions by searching and copying information from the similar regions of the same image or a collection of images. They result in a better performance in handling more complicated cases that fill larger holes in the natural images. This idea stems from the texture synthesis technique [
6], in which the missing region is filled by searching for the most similar and relevant patches from the uncorrupted regions. However, natural images are composed of structures and textures, in which the structures constitute the primal sketches of an image and the textures are image regions with homogenous patterns. Texture synthesis methods cannot handle the missing region with composite structures and textures. In order to find suitable image patches, bidirectional similarity [
30] is proposed to capture more visual information and introduces less visual artifacts when calculating the patch similarity. Bertalmio et al. [
4] propose to decompose the image into structure and texture layers, then complete the structure layer using diffusion-based methods and texture layer using the texture synthesis technique. It overcomes the smooth effect in the diffusion-based methods, but it’s still hard to recover the structure of the larger missing region. Criminisi et al. [
7] and Telea et al. [
31] design the patch-based methods by propagating the known patches into the missing patches gradually. However, these methods are computationally expensive since they work in an iterative way. To reduce the runtime and improve memory efficiency, tree-structure based search [
32] and randomized method [
11] are proposed. PatchMatch [
11] is a typical patch-based method that has shown notable results for image editing applications including image completion. It is implemented as the Content Aware Fill in Adobe Photoshop and arguably among the current state-of-the-arts in terms of both visual quality and speed. The major drawback of PatchMatch is that it searches for relevant patches from the whole image, without using any high level information to guide the search. Furthermore, it is unable to generate novel objects not found in the source image. These patch-based methods assume that the known regions have similar semantic contents with the missing regions, which may not be true in some scenarios such as face image completion. Therefore, they may work well in some images with repetitive structures but cannot generate reasonable results for images with unique structures.
To generate semantically new content, Hays and Efros [
15] proposed an image completion method using a large image database. This data-driven fashion method assumes that regions surrounded by similar context likely posses similar content. To complete a scene, images of the same scenes are retrieved from the database. By cutting the corresponding regions from the matched images and pasting them into the holes, the corrupted images can be repaired. However, this requires a high contextual match, which limits the applications greatly compared to the general approaches.
The second mainstream is the learning-based methods that employ deep neural networks to generate structures for the missing regions. These methods typically train a deep neural network as a mapping function from a corrupted image to a completed one in an end-to-end manner and have exhibited promising performance. A significant advantage of these methods over the non-learning ones is their ability to learn and understand adaptive image features of different semantics, which is especially important in cases of complex natural scenes, faces, objects and many others. The first learning-based method designed for image completion problem is context encoder (CE) [
16], which uses an encoder–decoder architecture. The encoder maps a corrupted image to a low-dimensional feature space, which the decoder uses to construct the completed image. It trains a convolutional neural network to complete the center region of
in a
image, with an
pixel-wise reconstruction loss in combination with a generative adversarial loss as the objective function. However, CE is only able to fill square holes at the center of an image, struggles to maintain global consistency and often generates results with visual artifacts. Yang et al. [
17] initializes the hole with the output of CE and then propagates the high-frequency textures from the boundary to the missing area. This method requires solving a multi-scale optimization problem iteratively, which noticeably increases computational cost during inference. Furthermore, Iizuka et al. [
19] extend CE by introducing both global and local discriminators to pay more attention on the missing regions. However, this method relies heavily on the post-processing of the completed image that blends both results from neural networks and traditional patch-based methods. Li et al. [
20] introduce additional face parsing loss for face completion. In order to handle the irregular holes, Liu et al. [
33] propose partial convolution for image completion, which uses masking and re-normalization steps to make the prediction of the missing pixels, is only conditioned on the valid positions in the feature maps. In the follow up study, Yu et al. [
34] introduce gated convolution layer that learns the features of the masked region and presents masks automatically from data. These effectively prevent the convolution weights from capturing too many zeros when they traverse over the incomplete region.
Several methods have been proposed by providing additional information for image completion. Yeh et al. [
21] search for the closest encoding in the latent space of the corrupted image and decode to get the completed image. However, this method is slow because back-propagation must be performed for every image during inference. Dolhansky and Ferrer [
35] show the importance of exemplar information for image completion. This method is able to generate both sharp and realistic results. However, it is highly specialized and does not generalize well. Contextual attention module (CAM) [
36] is proposed to model long-range spatial dependencies in images and integrated into networks to explicitly borrow information from distant spatial locations. It is a two-step approach to the image completion problem. In the first stage, it produces a coarse estimate of the missing region. Next, a refinement network sharpens the result using an attention mechanism by searching for a collection of background patches with the highest similarity to the coarse estimate. Nazeri et al. [
23] introduce edge recovery as the prior for the image completion task. This method essentially decouples the recovery of high and low frequency information of the completed region. Yi et al. [
37] propose the GMCNN (Generative Multi-column Convolutional Neural Networks) model to synthesize different image components in a parallel manner within one stage. Xin et al. [
38] use a fusion block to generate a flexible alpha composition map providing a smooth fusion and an attention map to make the network focus more on the unknown regions.
4. Experimental Results and Analysis
In this section, the effectiveness of the proposed method is investigated qualitatively and quantitatively.
4.1. Experimental Setup
The proposed method is evaluated on two datasets: CelebA-HQ [
28] and Paris StreetView [
29]. CelebA-HQ contains 30,000 celebrated face images at
resolution, which was created over the original CelebA [
47] dataset. The images in CelebA-HQ not only have higher resolution, but also are cleaner with significantly fewer artifacts. We randomly split this dataset into a training set, a validation set, and a test set in a 28:1:1 ratio. That is, there are 28,000 images for training, 1000 images for validation and the remaining 1000 ones for testing. Images in this dataset are then resized to
before being fed to the network using area interpolation during training, validating and testing.
Paris StreetView dataset has 14,900 images, which is elongated with size of . For the convenience of training, each image is split into three square parts: left part , middle part and right part . Then, these images are scaled down to using area interpolation, totaling 44,700 images. Paris StreetView dataset is split using the same scheme as CelebA-HQ.
All of the experiments were conducted using Intel(R) CPU (Santa Clara, CA, USA) Xeon(R) E5-2640 v3 (2.60 GHz, 64 GB memory) and TITAN X (Pascal) GPU (Santa Clara, CA, USA), and implemented in TensorFlow v1.13.1 (Google, Santa Clara, CA, USA), CUDA v10 (NVIDIA, Santa Clara, CA, USA), cuDNN v7 (NVIDIA, Santa Clara, CA, USA).
4.2. Edge, Color Information and Image Masks
In order to train the edge model, the ground truth edge maps
should be generated as the training labels. Canny algorithm is chosen to obtain rough but solid binary edge maps due to its speed, robustness, and ease of use, instead of dense sketches extracted by HED (Holistically-nested Edge Detection) [
48]. Edge maps produced by Canny algorithm are binary (1 for edge, 0 for background) and one-pixel wide, which enhance the generalization capability of the model. However, edge maps produced by HED are of varying thickness and pixels can have intensities at the interval of [0, 1]. There are no significant improvements compared to Canny algorithm in the completion results [
23]. The performance of Canny algorithm is controlled by the standard deviation of the Gaussian smoothing filter
, Nazeri [
23] suggests that the best results will be obtained when
; an edge map example is shown in
Figure 2b.
Color maps corresponding to the style features that can provide additional information for the missing region during completion. To train
, the ground truth color maps
are created in an explicit way; they should be as simple as possible and include enough style information. First, a median filter with kernel size 21 is applied to the original images. In order to filter out the high frequency information, a large kernel size is chosen in the first median filtering. Next, the K-means algorithm with
is used to yield the average color maps. We choose a small
k because the style information should be held as much as possible. After that, a median filter with kernel size 3 is applied again to blur the sharpness of the boundary lines. A small kernel size is adopted in this median filtering because the boundary lines are thin. This results in color maps with largely constant colors in low-frequency regions; a color map example is shown in
Figure 2c.
Masks play a vital role in the training. There are two types of masks that are used in the experiments: regular mask and irregular mask. Regular masks are square with a size of
(
of total image pixels) at a random location within the image. We use QD-IMD (Quick Draw Irregular Mask Dataset) as the irregular masks, as shown in
Figure 3. The irregular masks are augmented by introducing four rotations (
,
,
,
) and a horizontal reflection for each mask.
4.3. Training Setup and Strategy
All of the networks are trained using
images with a batch size of 8 due to the machine memory. The optimization is performed employing the Adam optimizer [
49] with
and
, which is a stochastic optimization method with adaptive estimation of moments. For the experiments, the hyper-parameters are set to
,
,
,
and
. In the training processing, the stability is very important. In the edge and color model, the parameters of
and
should be set as having larger values than others, since the feature matching loss stabilizes the training processing. In the image completion network, its training process is more stable because it has more information including edge and color priors guiding the training. Thus, the
should be set 1.0. All of the adversarial parameters should be set as having very small values because values that are too large tend to lead to instability in the early stage. Firstly, generators
,
and
are trained separately with learning rates
until convergence. Then, the networks are fine-tuned by removing
and
with learning rate
until convergence. Corresponding discriminators are trained with a learning rate one tenth of the generators. During each training iteration, the discriminator is trained
k steps and the generator is updated once.
k is set to 3 in all of the experiments. If
, the discriminators cannot distinguish the real and fake images; if
, the generators cannot get enough gradients from the discriminators. In order to stabilize the model during training, in the early stage, very small adversarial loss weights compared to the other ones are adopted, i.e.,
. After that, the adversarial loss weights should be gradually increased until
, similar to the curriculum learning. The larger the adversarial parameters, the more details are generated. Thus, the adversarial parameters should be gradually increased to generate more details and keep the training process stable.
4.4. Qualitative Comparison
Figure 4 shows a sample of images completed by PIC-EC. For visualization, the colors of the composite edge maps
are reversed, and the generated parts are dyed blue. The PIC-EC is able to keep the image structure and color map intact with a large fraction of image damaged. Furthermore, the completed images exhibit realistic results and minimal blurriness because the edge and color generators can learn enough information to guide the image completion network.
We also compare the qualitative performance of PIC-EC with the existing image completion methods using the images with irregular masks as well as the squared ones. The implementations of all these methods are based on their released source codes and pre-trained models. Note that no post-processing steps are performed for all these methods to ensure fairness of the comparisons.
Figure 5 and
Figure 6 summarize the qualitative comparison results on the CelebA-HQ dataset with irregular masks and squared masks, respectively.
Figure 7 shows the images generated by PIC-EC with those generated by other methods on the Paris StreetView dataset with regular masks. From the results, the traditional method FMM (Fast Marching Method) [
31] has no ability to generate semantic contents, especially in the larger squared mask cases, as shown in
Figure 6c and
Figure 7c. It is not surprising because FMM starts from the boundary of the missing region and goes inside the region gradually filling everything in the boundary using the Fast Marching Method. It takes a small neighborhood around the pixel on the neighborhood to be completed. This pixel is replaced by a normalized weighted sum of all the known pixels in this neighborhood. It does not consider the semantic relevance and is only suitable for completing the small missing regions. In
Figure 5d and
Figure 6d, GLCIC (Globally and Locally Consistent Image Completion) [
19] shows obvious visual artifacts including blurred and distorted images in the masked regions, and it struggles to generate consistent structures with the remaining image context because of insufficient understanding of the image characteristic and ineffectiveness of convolutional neural networks in modeling long-term correlations between contextual information and the missing region. As shown in
Figure 5f and
Figure 6e,g, the images completed by DeepFill [
36] and GMCNN [
37] have severe color distortion. Therefore, these methods can not accurately fit the color distribution over CelebA-HQ dataset. Because DeepFill adopts a patch matching method in its contextual attention module, it fails to achieve plausible results even through the refinement network. In
Figure 7d, GMCNN generates the distorted structures in the doors and windows. The deconvolution operations in GMCNN lead to the structure and color distortion. Although DFNet [
38] shows a fine performance, it shows a lack of relevance between the hole and background regions such as symmetry of eyes, as shown in
Figure 5e and
Figure 6f. The images completed by the proposed method PIC-EC and the state-of-the-art method EdgeConnect [
23] are closer to the ground truth than images from other methods. Both of them are able to recover correct global structures. However, the PIC-EC method can generate sharper details than EdgeConnect such as the eyes and mouth, as shown in
Figure 5g,h,
Figure 6h,i and
Figure 7e,f. Due to EdgeConnect losing image color information when recovering the global structures, it may fill in incorrect details in some missing areas. When edge and color information is present simultaneously as the guidance, the image completion network of PIC-EC only needs to learn the fine details without having to worry about preserving image structure and color maps. Therefore, the images generated by PIC-EC demonstrate the superiority in preserving both appearance and structure coherence.
4.5. Quantitative Comparison
In addition to the visual results, the quantitative performance of the proposed PIC-EC method is also evaluated using the following four metrics: (1) relative
; (2) peak signal-to-noise ratio (PSNR); (3) structural similarity index (SSIM) with a window size of 11 and (4) Fréchet Inception Distance (FID) [
50]. PSNR directly measures the difference in pixel values and SSIM estimates the holistic similarity between two images. They assume that the ideal recovered results are exactly the same as the target images. They are the most used evaluation criteria among the image generation community. However, these two metrics assume pixel-wise independence, which may assign favorable scores to perceptually inaccurate results. Therefore, the FID metric is also used to evaluate the output quality because it is closer to human perception. FID measures the Wasserstein-2 distance between the feature space representations of real and completed images using the pretrained Inception-V3 model.
The experiment is conducted over CelebA-HQ and Paris StreetView test datasets for six different squared masks include
,
,
,
,
and
. The location of each mask is random. We run each method on the corrupted images and get the final completed results. The statistics results are based on the completed image, which are mostly comprised of the ground truth images and are reported in
Table 3 and
Table 4, respectively.
Figure 8 and
Figure 9 show these statistics results in an intuitive way. We find that as the mask size increases, the performance of all the methods has declined gradually to varying degrees, which is in line with our intuitive experience. The methods will get less information to fill the missing region as the masks get larger. Obviously, the FMM method has the worst performance because it has no ability to generate semantic contents, especially in the larger mask cases. Overall, the EdgeConnect and PIC-EC are superior to other methods because both of them only consider making the textures of the completed images realistic, but ignore the structure and color information of the images. When the mask size is small, the performance of EdgeConnect is better than that of PIC-EC because the effect of the color map is not obvious in these cases. However, the PIC-EC method performs better than EdgeConnect in all four metrics when the mask size becomes larger, such as
and
. In particular, PIC-EC outperforms EdgeConnect by
in mean
error, 2.273 dB in PSNR, 0.013 in SSIM and 2.384 in FID over CelebA-HQ in the largest mask size. At the same time, for Paris StreetView, PIC-EC outperforms EdgeConnect by
in mean
error, 1.4 dB in PSNR, 0.039 in SSIM and 0.377 in FID. Both PIC-EC and EdgeConnect achieve small
error; however, the
metric simply favors smooth and blurry results. PIC-EC has a better FID performance than EdgeConnect, which indicates that the images completed by PIC-EC are more plausible since the FID metric is closer to human perception. This should be accredited to enough prior information learned by PIC-EC. Therefore, the PIC-EC method achieves quantitative results exceeding others by a considerable margin under all the four metrics and can generate more realistic images with the guidance of edge and color maps. Other methods only consider making the textures of the completed image realistic, but ignore the structures and colors of the image. Furthermore, PIC-EC with edge guidance brings consistent improvements over others.
4.6. Computation Time
We perform the feed-forward inference average computation time comparison for different methods. All these methods are evaluated with a machine of an Intel Core Xeon E5-2640 v3 CPU and a TITAN X (Pascal) GPU by processing 1000
images with
holes. The results are listed in
Table 5. DFNet achieves the shortest computation time because it only contains a smaller network than other methods. GLCIC has the longest computation time because its generation network contains much more feature map channels than other methods. Our PIC-EC method has to obtain the edge and color priors before the image completion; therefore, it takes a little more computation time. Still, PIC-EC takes less computation time than GLCIC.
4.7. User Study
We perform a user study using the human perceptual metrics
Two Alternative Forced Choice (2AFC) and
Just Noticeable Differences (JND) over CelebA-HQ and Paris StreetView datasets. 2AFC is a method for measuring the subjective experience of a person through their pattern of choices and response times. JND is the amount something must be changed in order for a difference to be noticeable, detectable at least half the test time. In the 2AFC test, the users are asked whether or not a randomly selected completed image from each method is real. For JND, the users are asked to select the more realistic image from pairs of real and completed images. Users are given two seconds to decide for each image. This experiment is performed over 300 images for each method and mask size. The results are presented in
Table 6 and
Table 7. These results show that there are more images generated by PIC-EC being favored by the users because PIC-EC generates sharper images with more details.
4.8. Limitations
Although the PIC-EC model is able to generate semantically plausible and visually pleasing contents, it has some limitations. As demonstrated in [
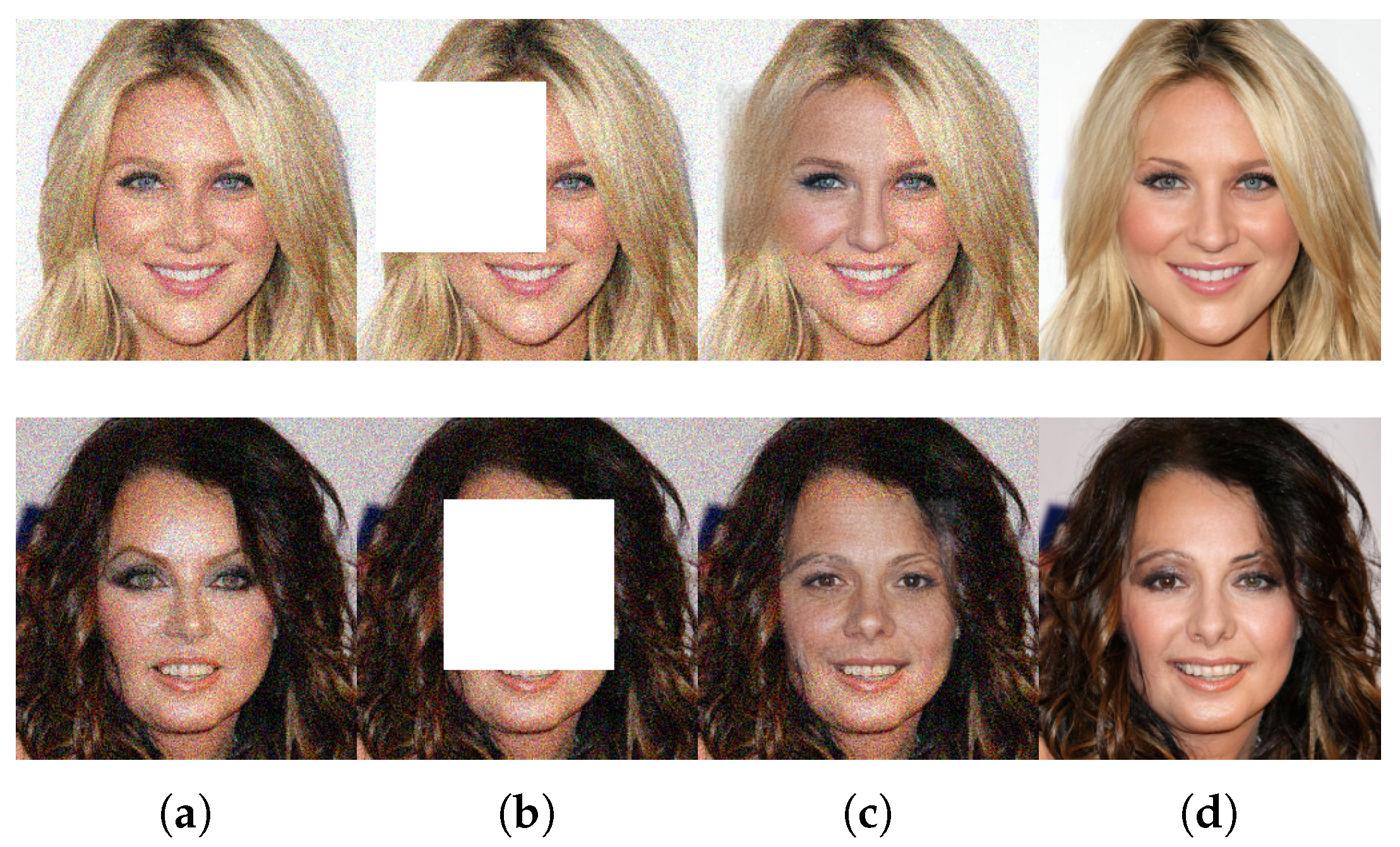
51], deep neural networks are easily fooled by the adversarial examples. In order to explore the limitations of PIC-EC, we generate some adversarial examples by adding the Gaussian noise.
Figure 10 illustrates the completion results over these adversarial examples. As
Figure 10 suggests, the performance of PIC-EC is easily affected by the noise in the textured regions, such as the hair and eyes. In addition, the image tones are darker. Since PIC-EC should learn the image features from the known region, the adversarial examples will degrade the quality of features and affect the performance of PIC-EC.
In PIC-EC, the image completion network would also be fooled by the misleading edge and color priors.
Figure 11 shows some failure cases of PIC-EC. For visualization, the colors of the edge maps are reversed and the generated parts are dyed blue. As shown in
Figure 11c, the edge maps in the missing region are not intactly restored. Therefore, there is not enough edge prior to construct the structure of the missing region. In this case, the color prior dominates the image completion and the completed region would be blurry because the color maps contain a lot of low-frequency information that are less affected. These failure cases indicate that PIC-EC cannot handle some unaligned faces well, especially the side face images. This issue may be alleviated with 3D data augmentation.
5. Discussion
Image completion is a challenging task because it is an ill-posed inverse problem and requires generating visually pleasing new pixels that are semantically consistent with the surrounding regions. Therefore, prior knowledge plays a vital role in this task to achieve meaningful and visually believable results. Under the guidance of this idea, we use both edge and color information as the prior knowledge for image completion. The results presented in the previous section have suggested that our method PIC-EC achieved superior performance on standard benchmarks, both qualitatively and quantitatively.
Figure 4 showed that
and
are capable of hallucinating edge and color maps in the missing regions given the rest of the image. It is essential for the following image completion task. Edge and color maps recovery is a relatively easy task compared to image completion. Thus, the image completion network only needs to synthesize the details for the missing region and this will greatly reduce the pressure on the image completion network. As illustrated in
Figure 5, the qualitative comparison results over CelebA-HQ with irregular masks, our PIC-EC method performed better than other methods in terms of image structural integrity, color accuracy and texture details such as the eyes and mouth.
Figure 6 and
Figure 7 led to a similar conclusion.
Table 3 and
Table 4 and
Figure 8 and
Figure 9 quantitatively demonstrated comparison results for six different masks. These results suggested that, as the damaged area of the image increases, the performance of all the methods decreases. In general, this is a normal phenomenon. However, PIC-EC is minimally affected because edge and color maps can provide enough prior knowledge for the image completion network. The user study further indicated that the images synthesized by PIC-EC were closer to the ground truth images under human visual perception.
In the domain of image-to-image (I2I) translation [
26,
27,
39], photo-realistic images can be synthesized from sparse binary edge maps by cGANs. Although the images generated by these methods were not so accurate, they suggested that the edge map is an effective prior for image generation. Existing research [
52] recognizes the critical role played by the color map which can be seen as an explicit style feature in the domain of image reconstruction. It leads us into considering the introduction of the color map to improve the style consistency between the missing region and the remaining image context. Our study aims to contribute to this growing area of research by exploring the role of prior knowledge in the image completion task.
Although PIC-EC has achieved semantic plausibility and visually pleasing results, there are also some limitations existing. Firstly, PIC-EC is easily fooled by the adversarial examples that will degrade the quality of features and affect the performance of PIC-EC. Secondly, since edge and color generators are fundamental to the PIC-EC, once they are not working properly, PIC-EC fails to accurately complete the missing region. This happens sometimes in richly textured areas, or when a large portion of the side face image is missing. For this reason, improving the robustness against the adversarial examples and the performance of edge and color generators have become the important research directions in the future.












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}