
Sintering of Two Viscoelastic Particles: A Computational Approach


Abstract
:1. Introduction
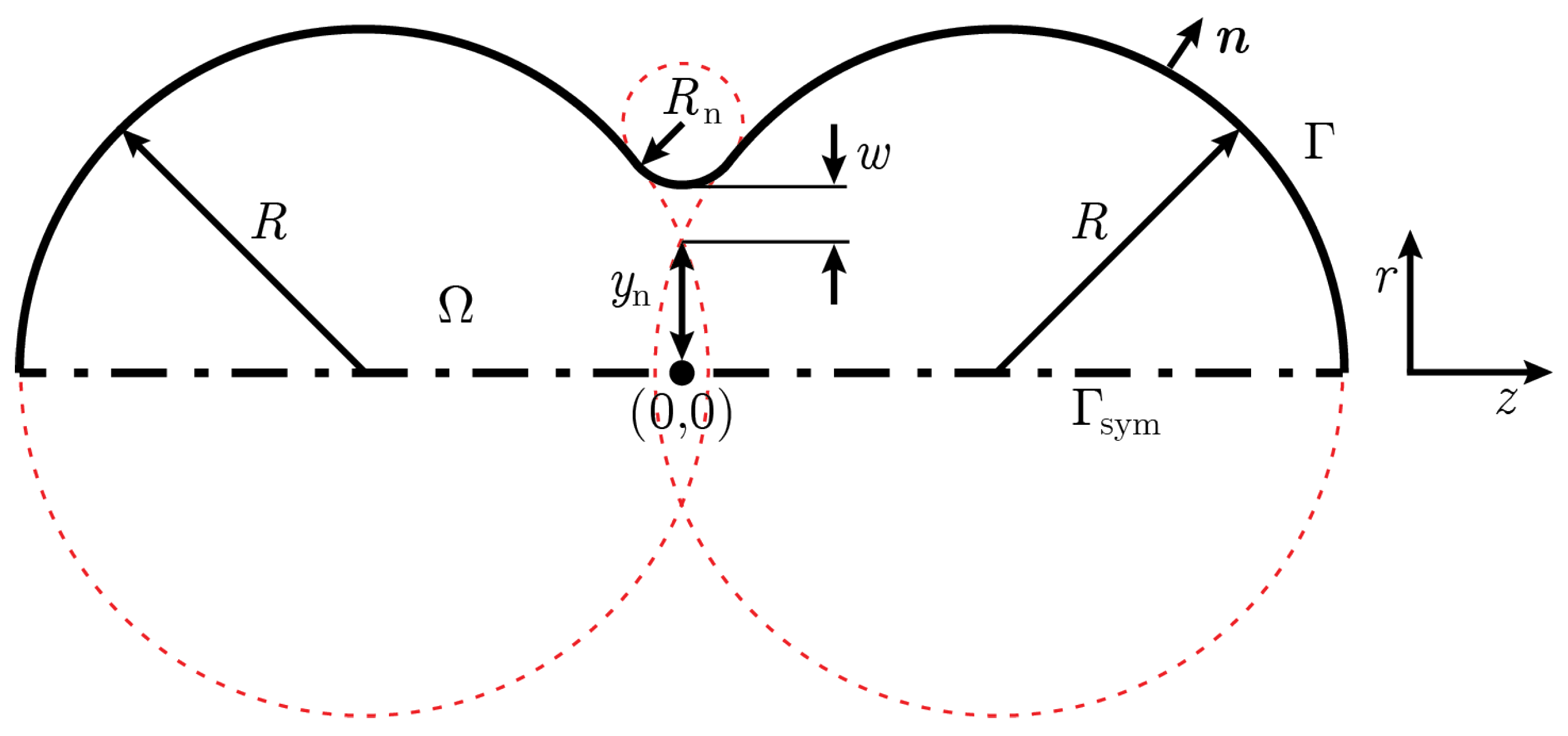
2. Problem Description
3. Governing Equations
3.1. Balance Equations and Constitutive Models
3.2. Interface Tracking
3.3. Boundary Conditions
3.4. Dimensionless Equations
4. Numerical Method
4.1. Moving Domain
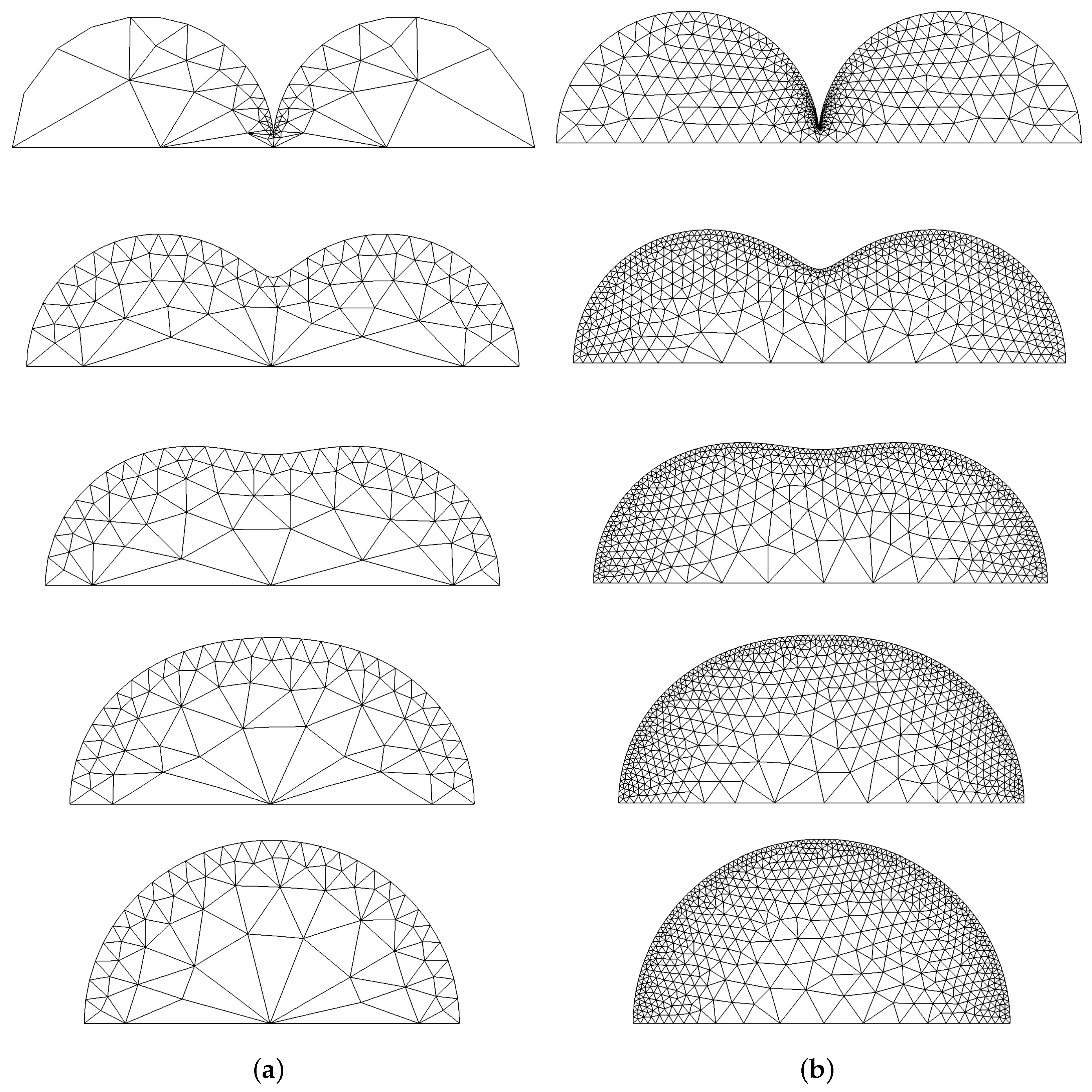
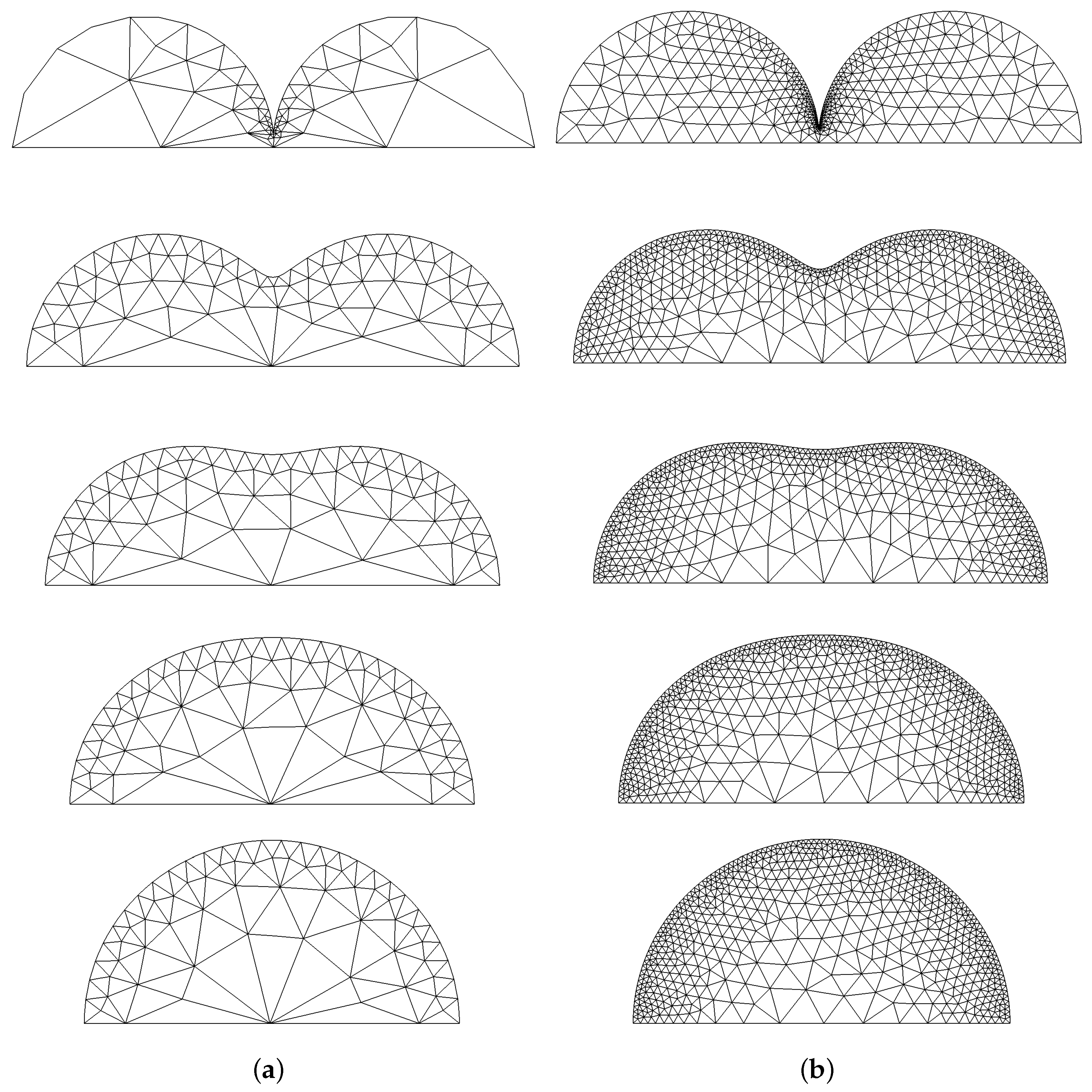
4.2. Remeshing and Projection
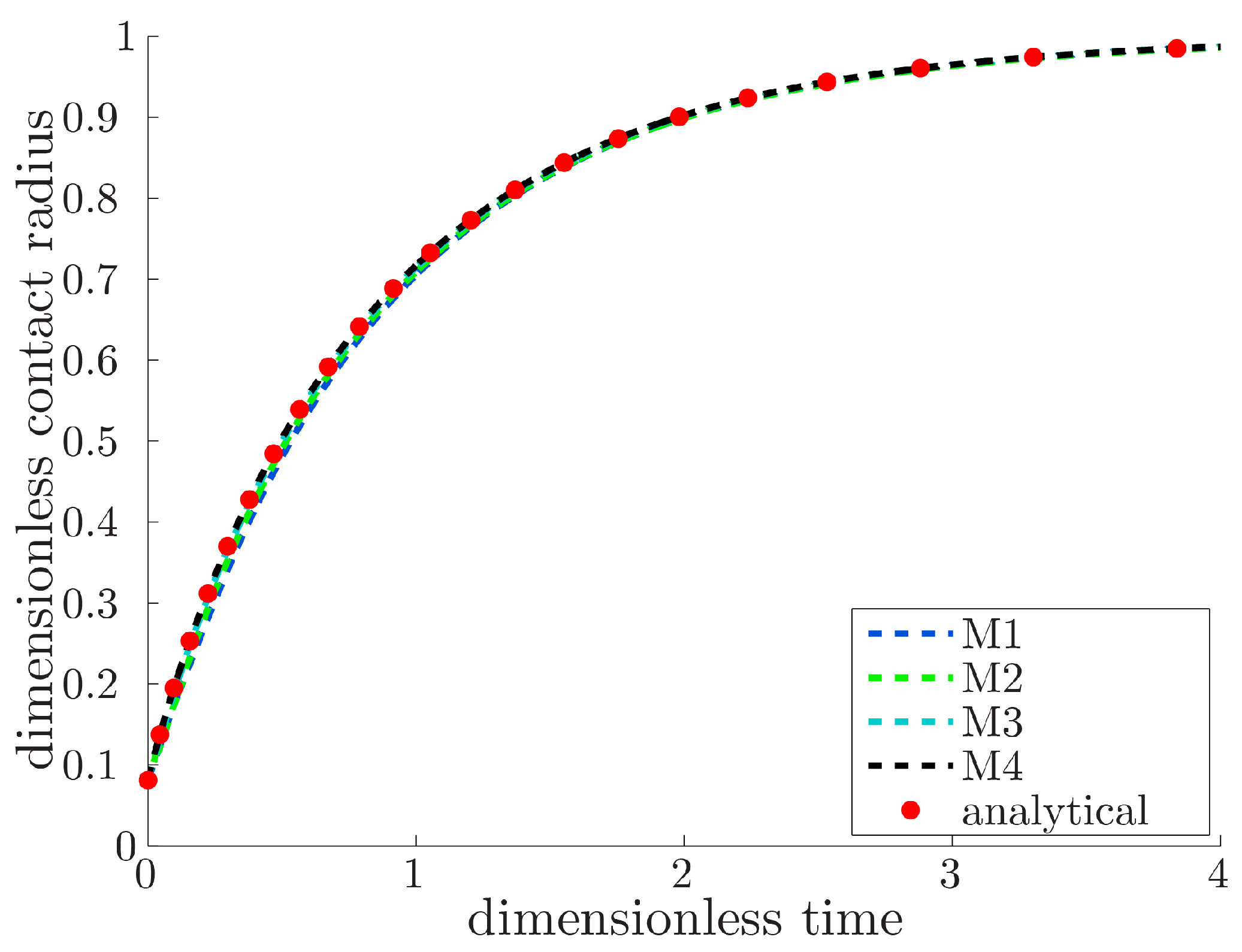
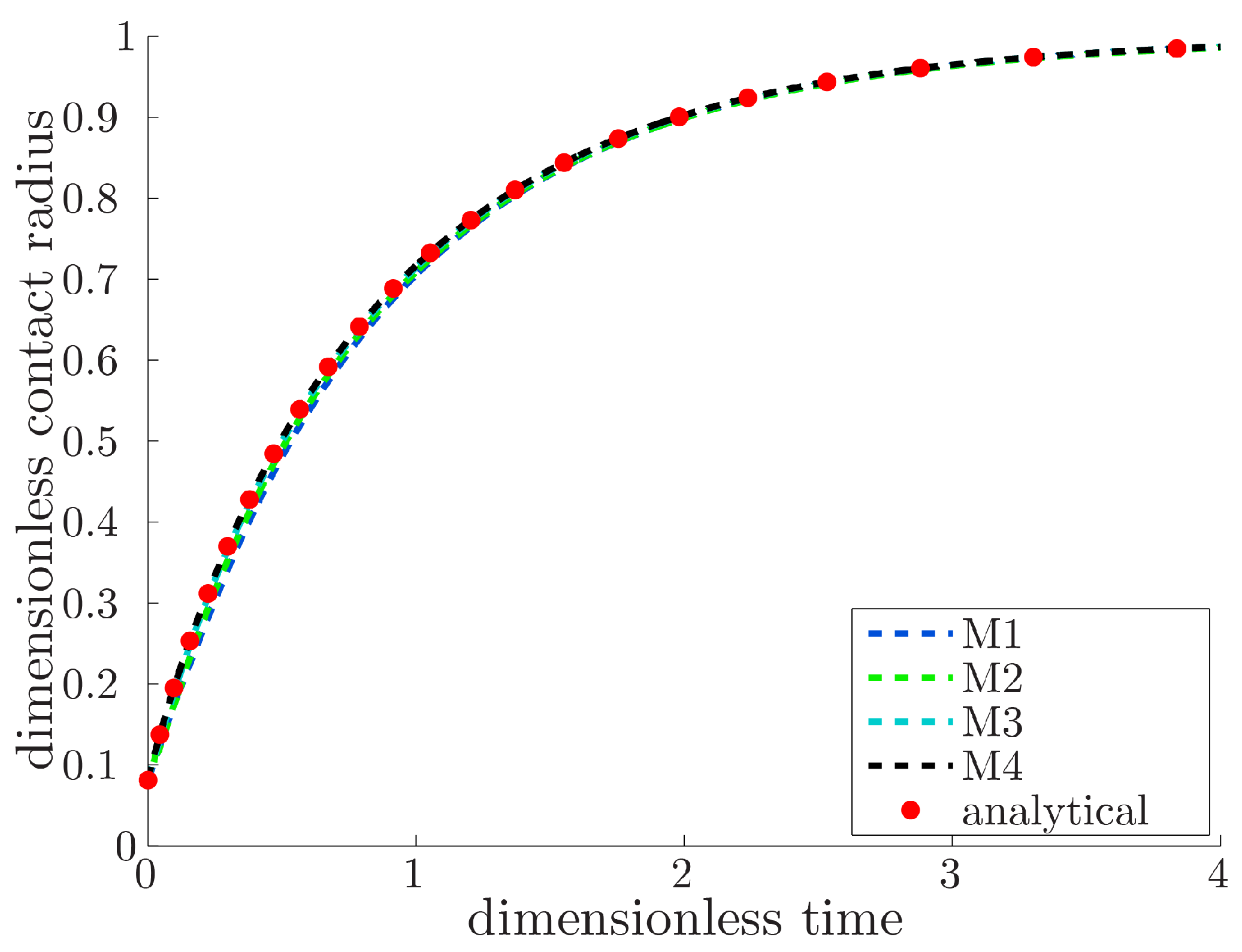
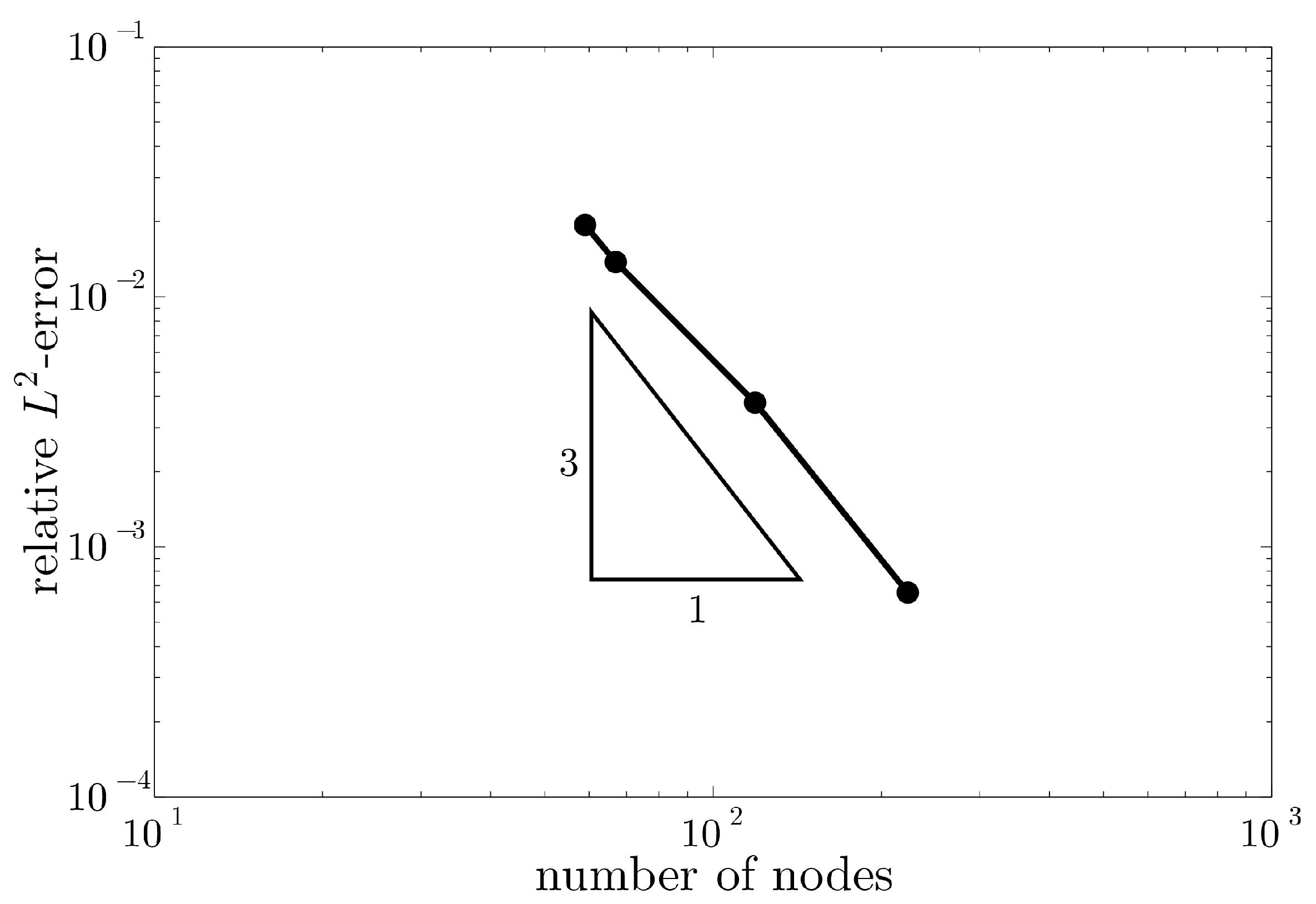
5. Validation
6. Results
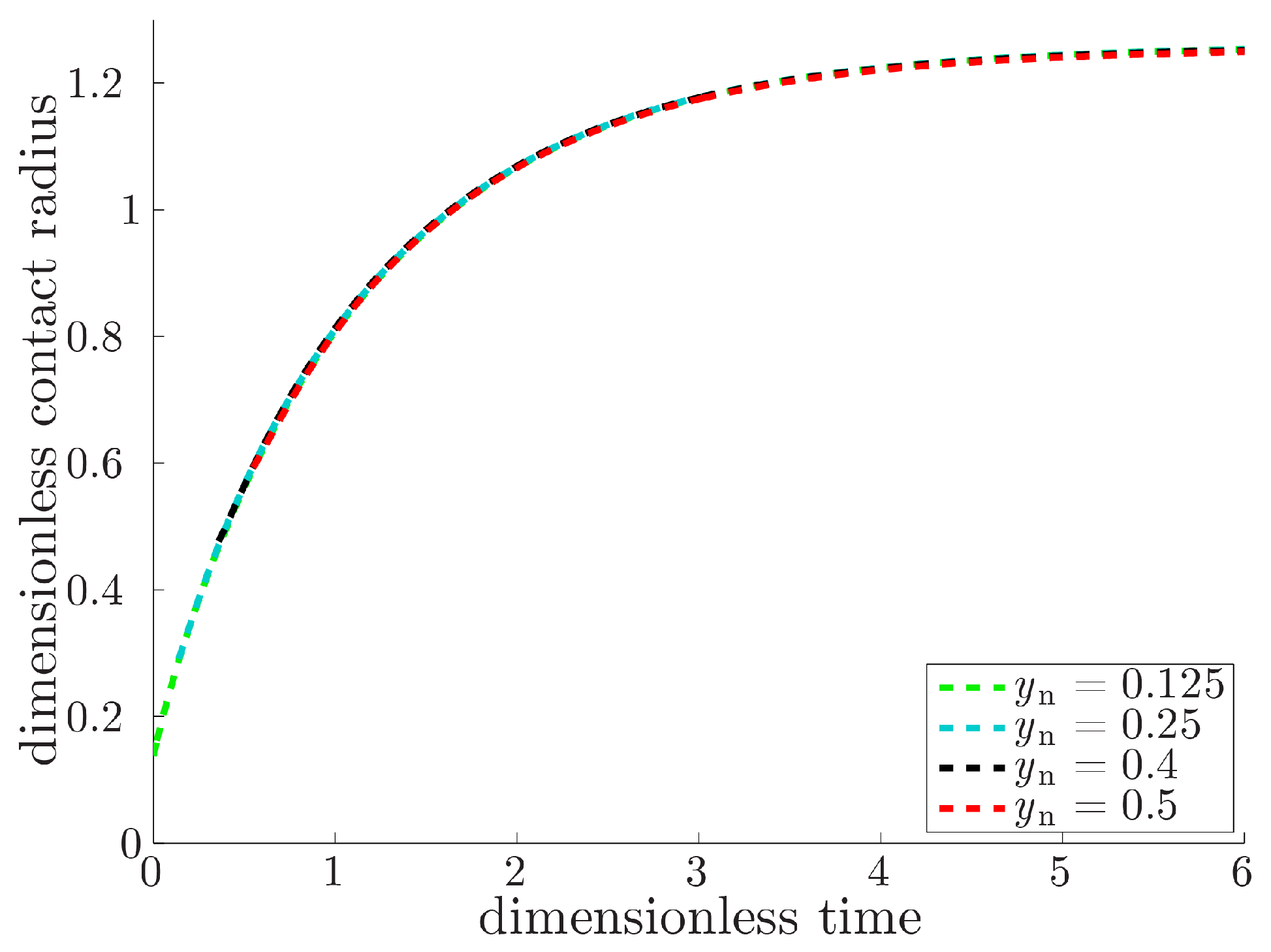
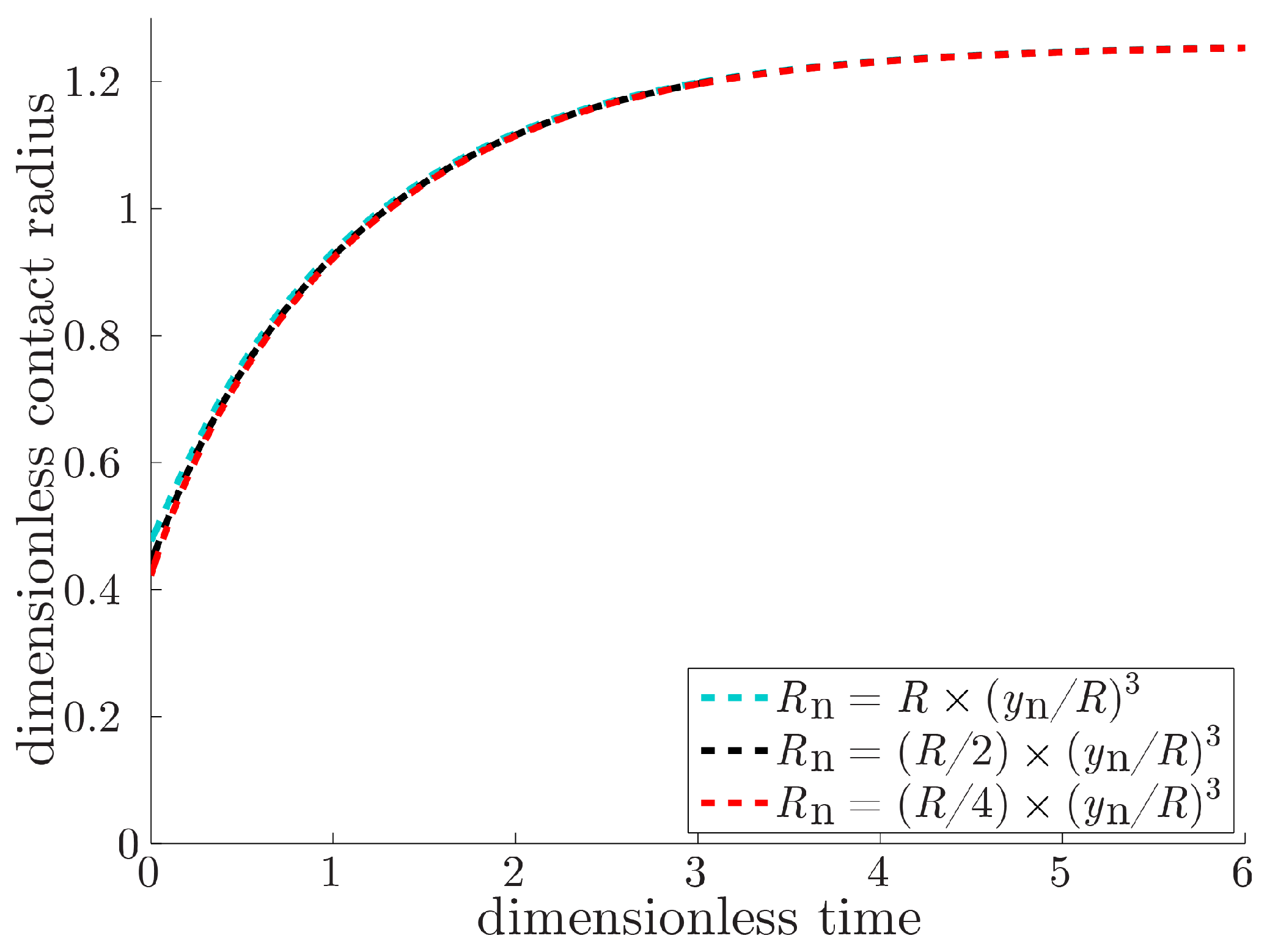
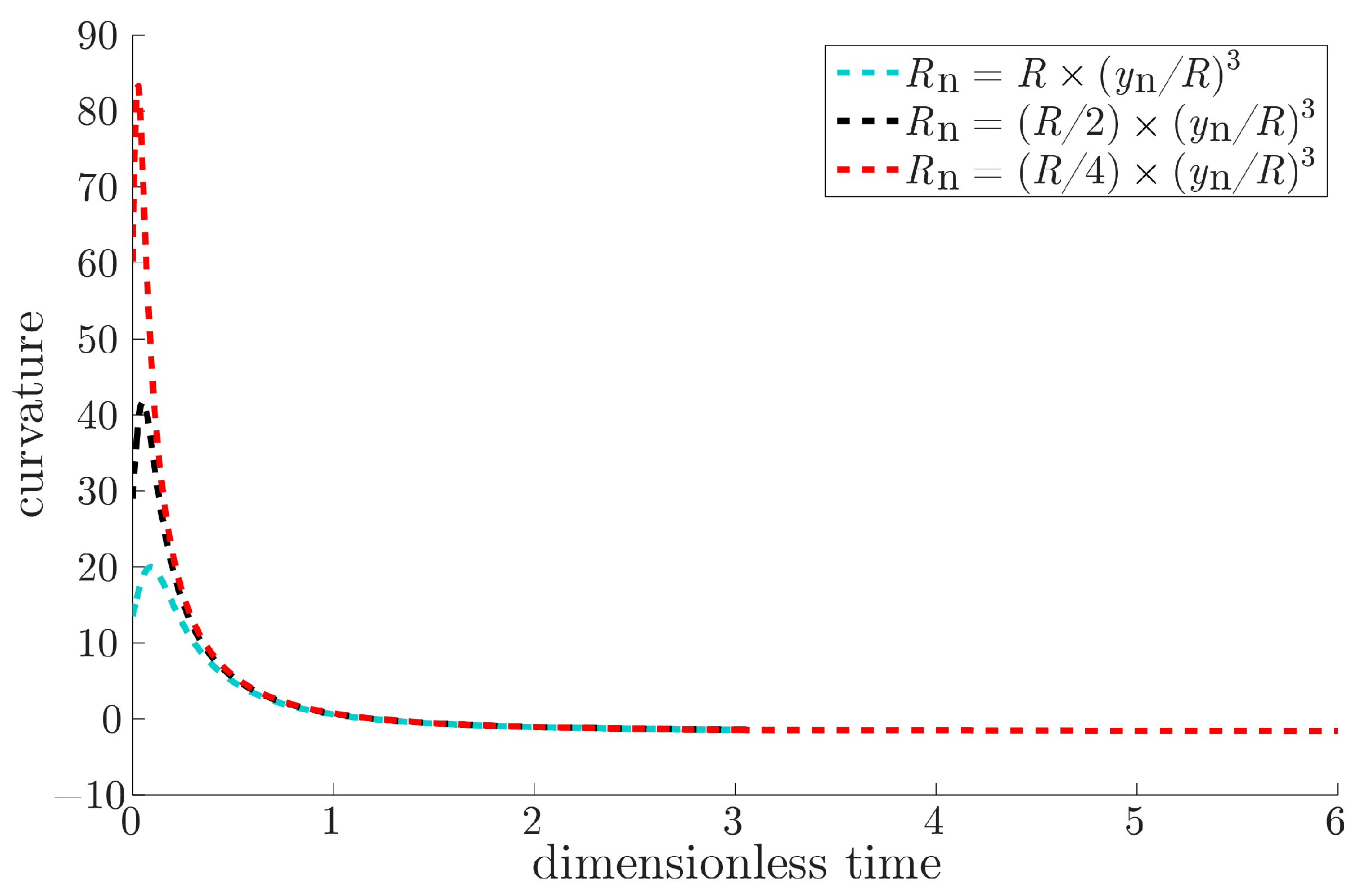
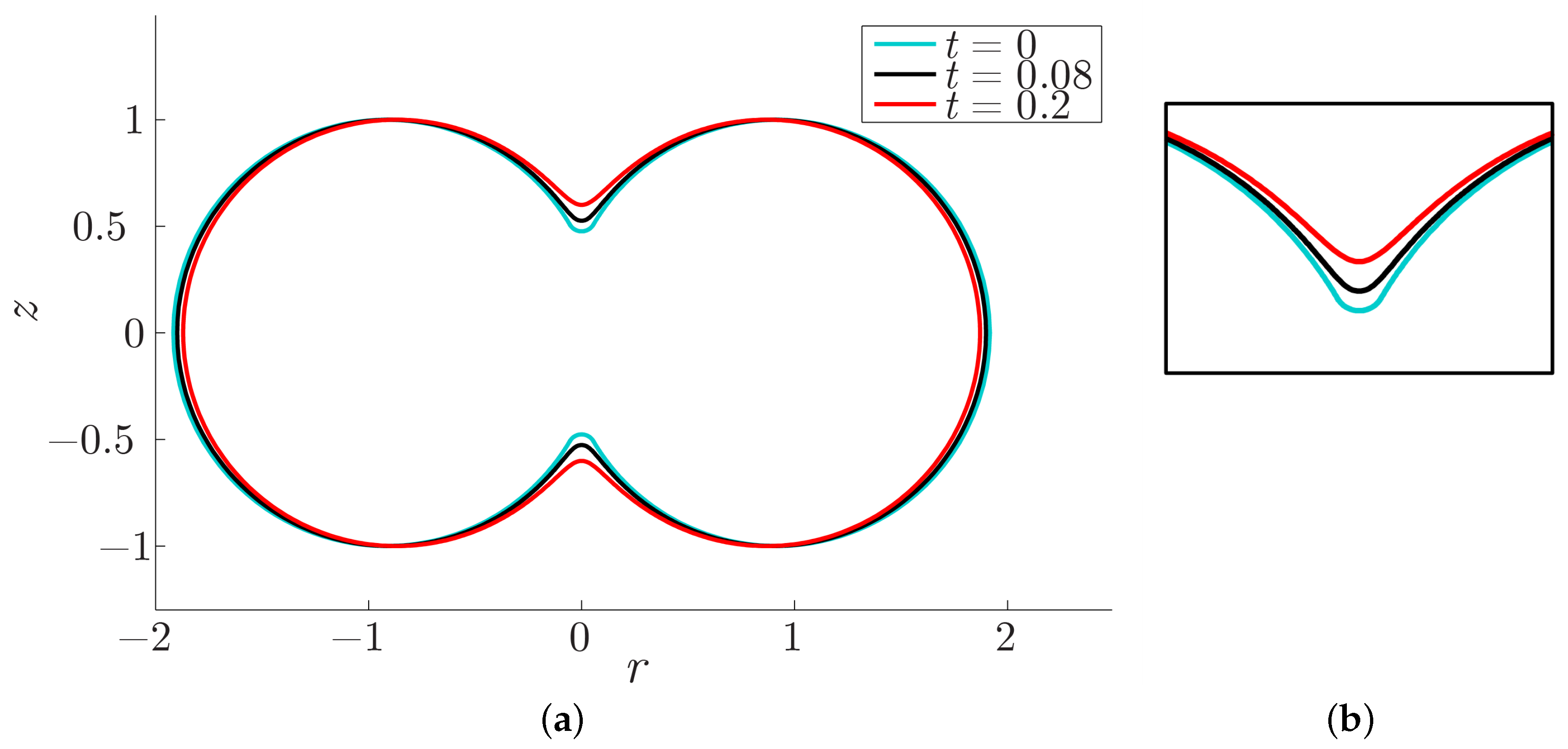
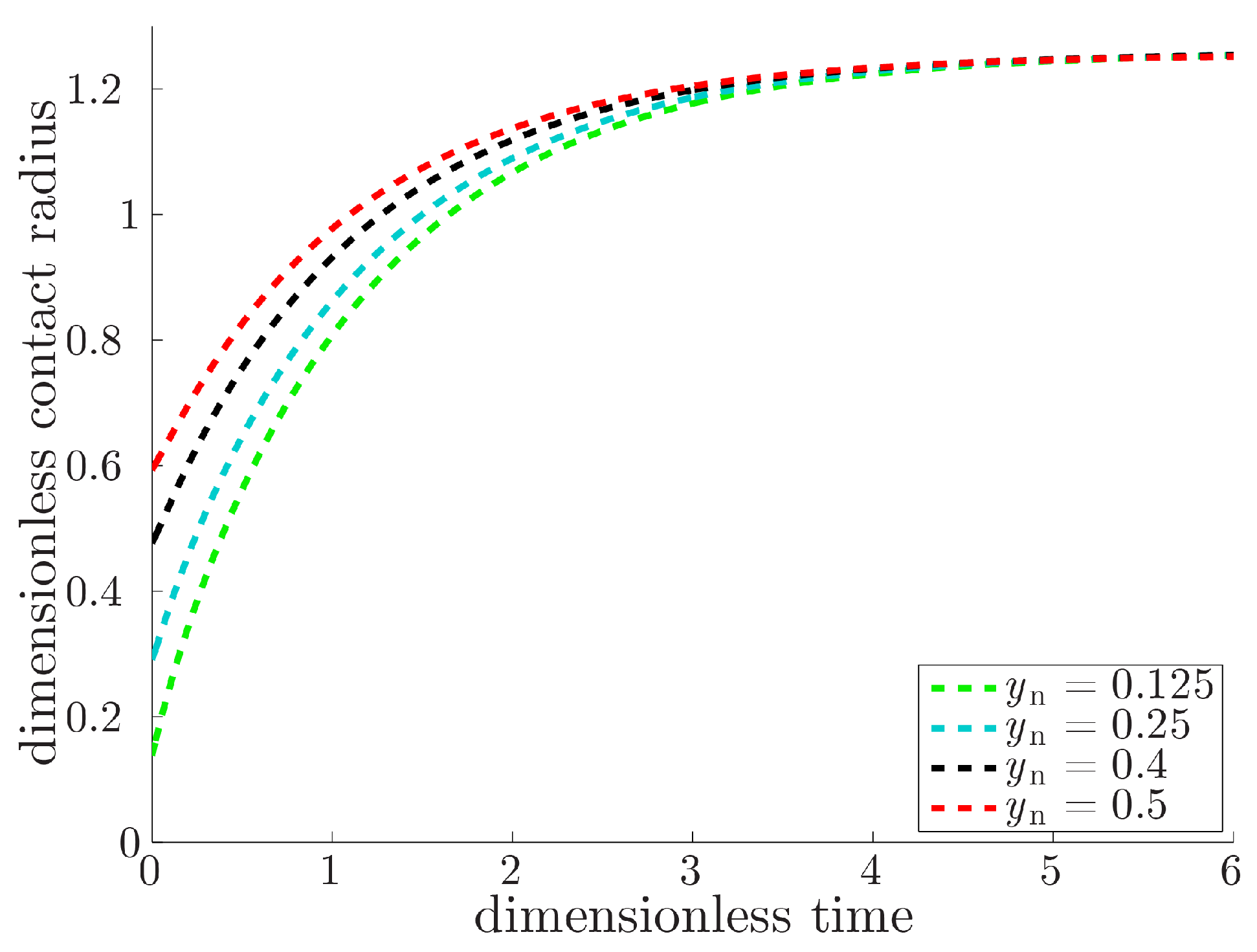
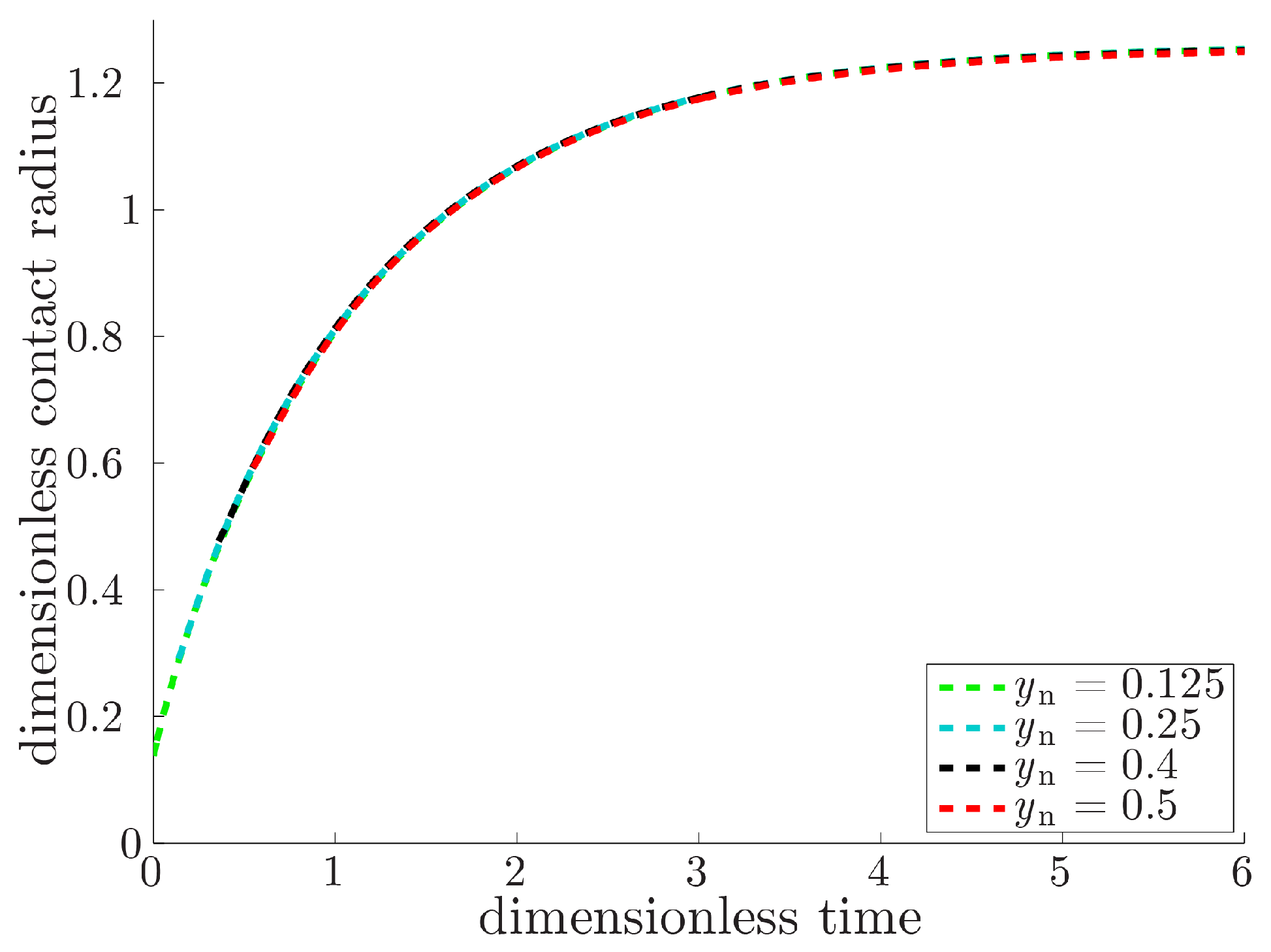
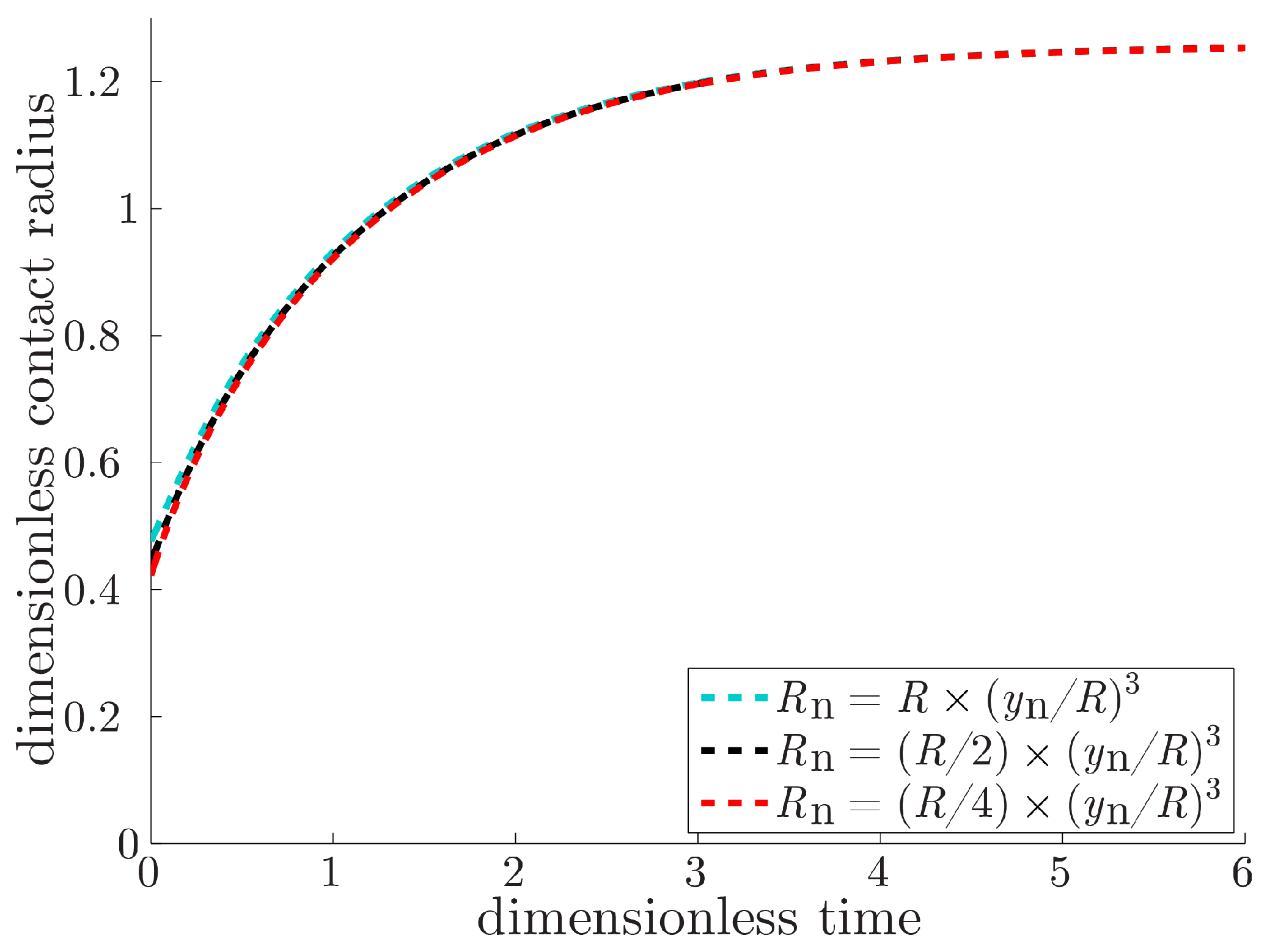
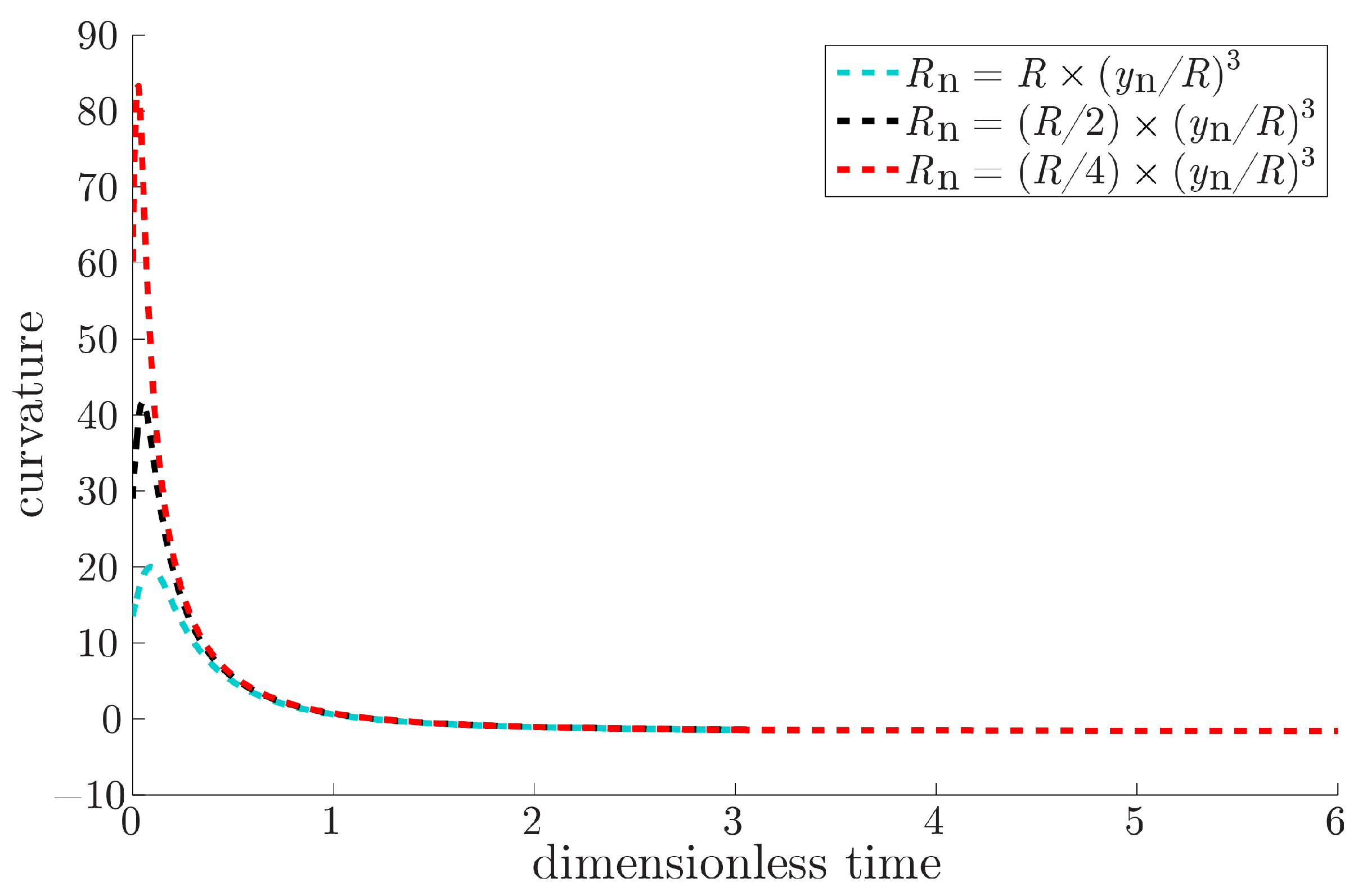
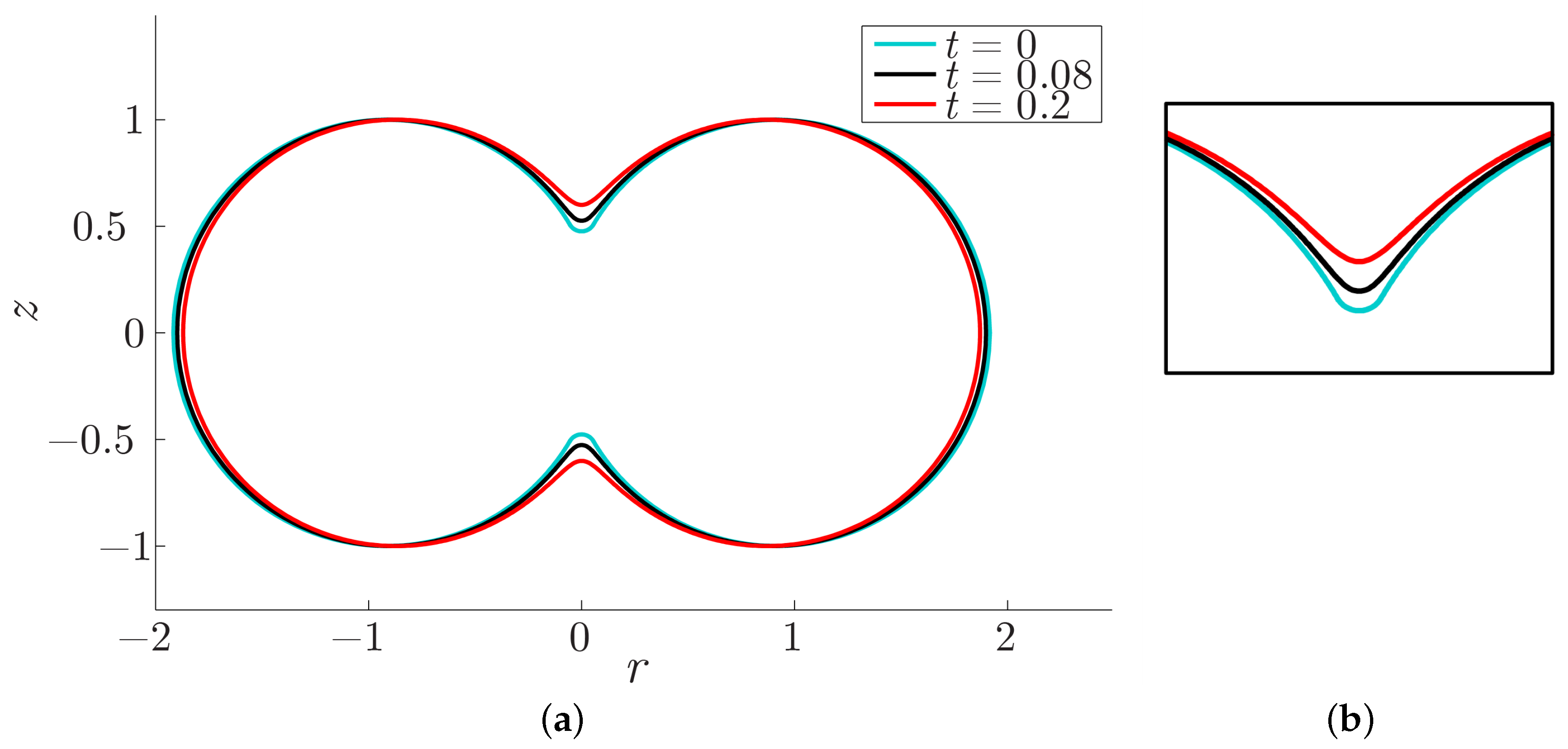
6.1. Effect of the Initial Geometry
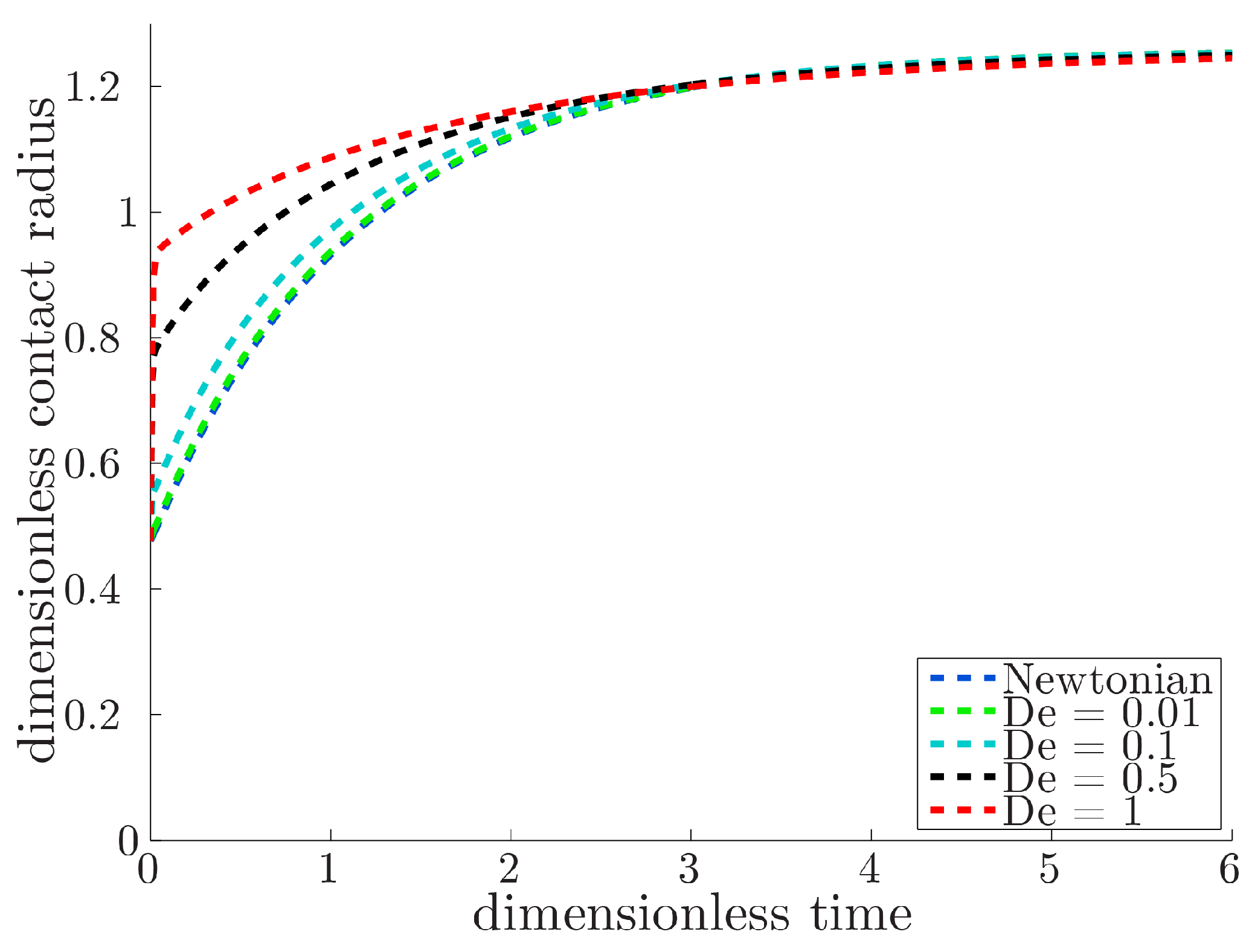
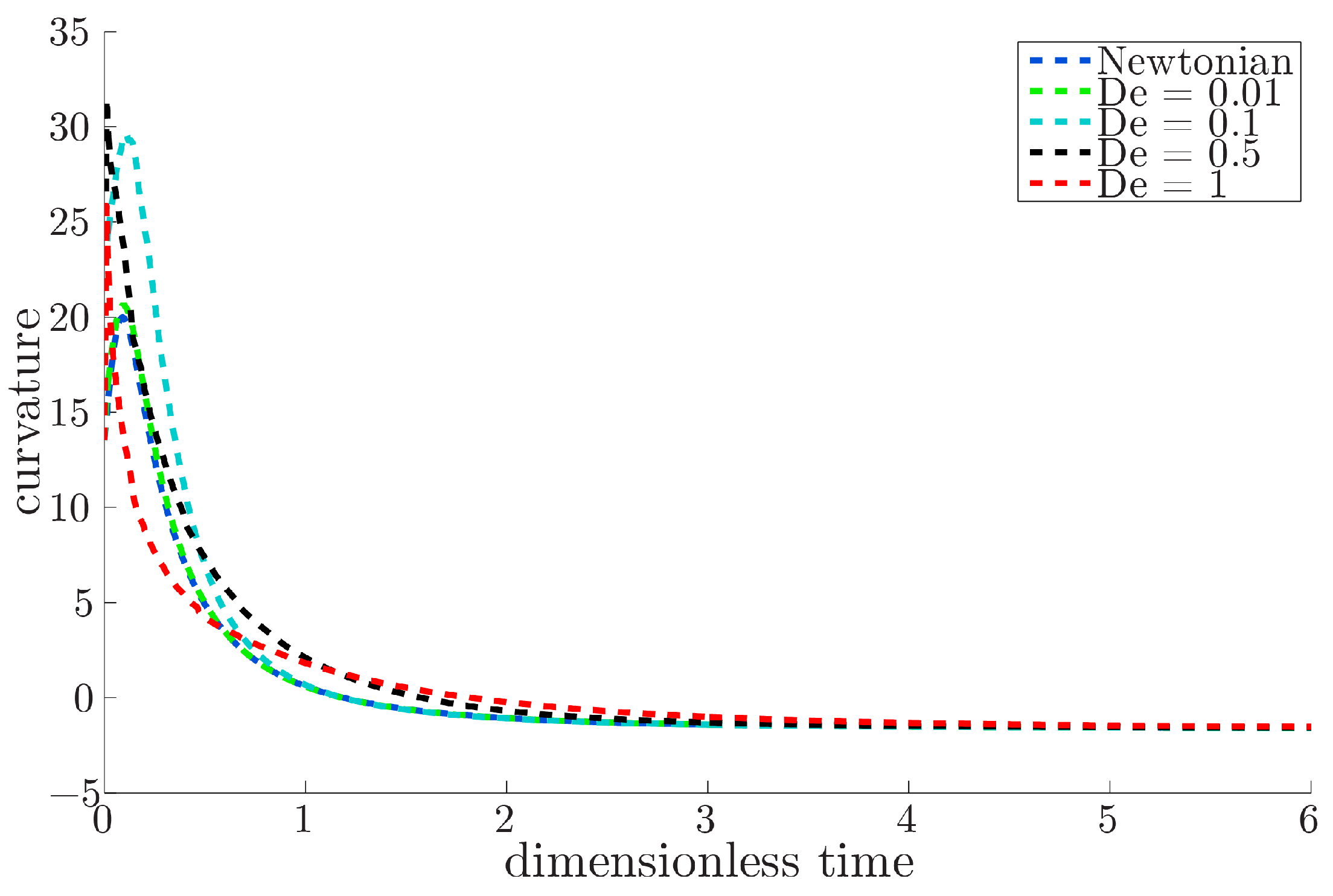
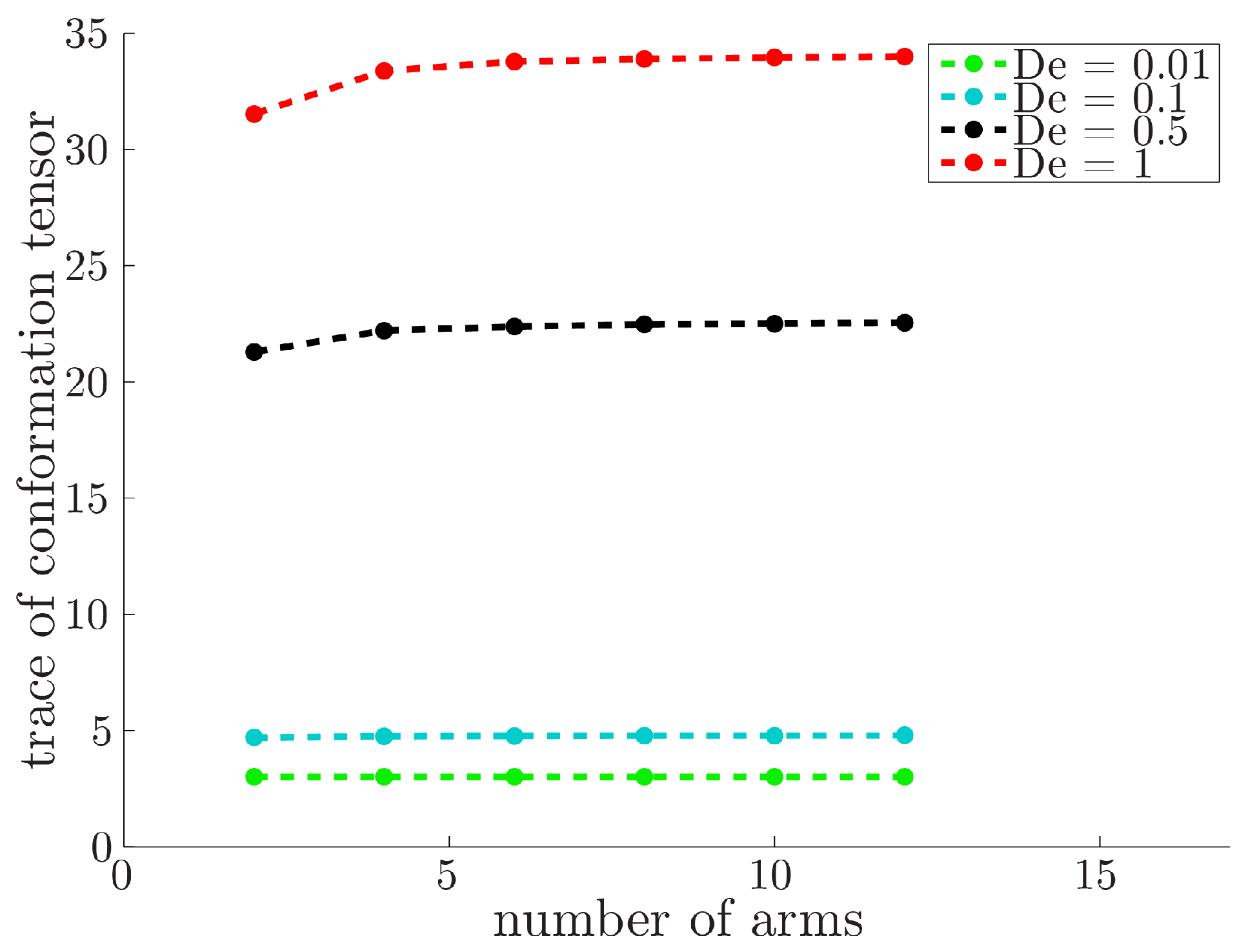
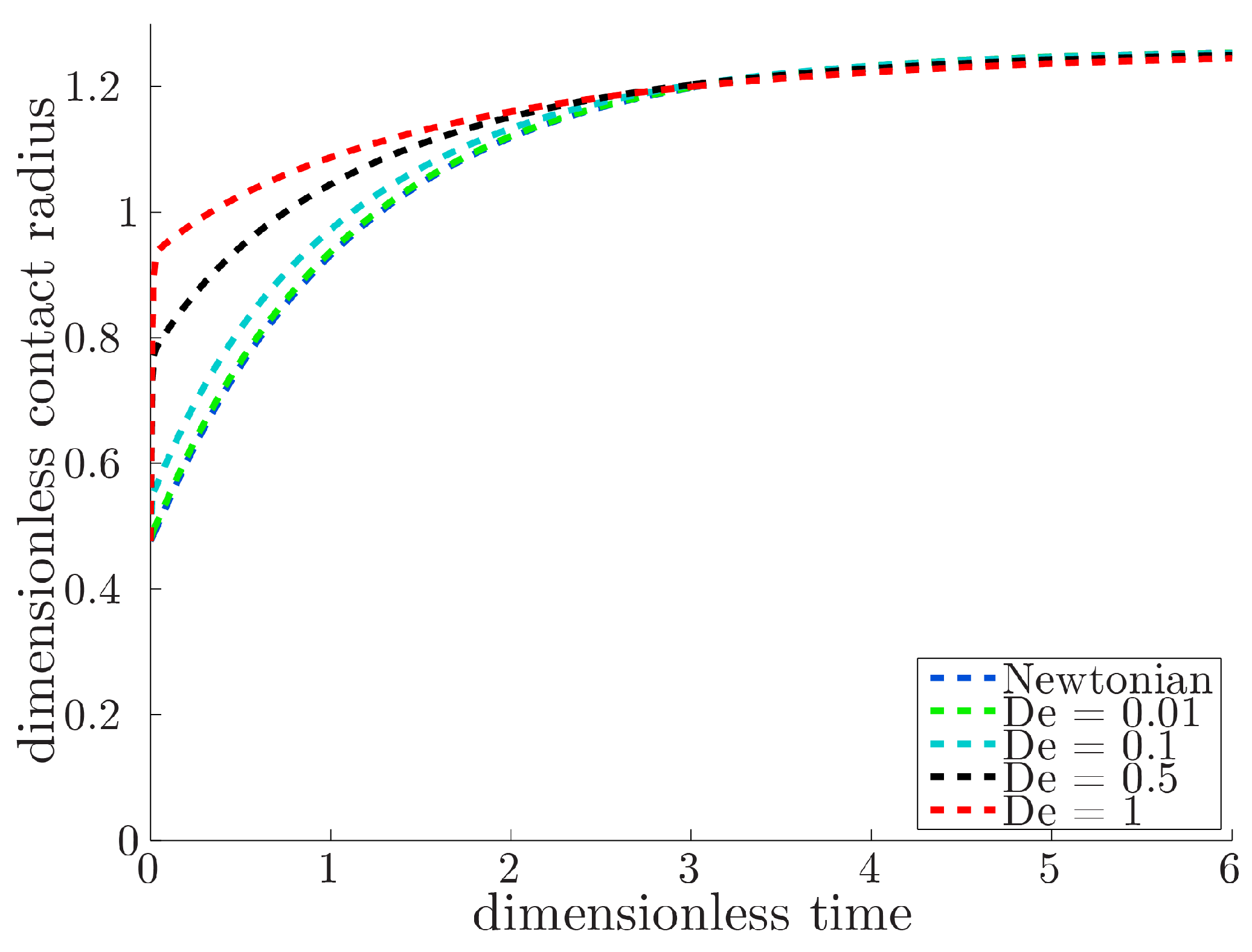
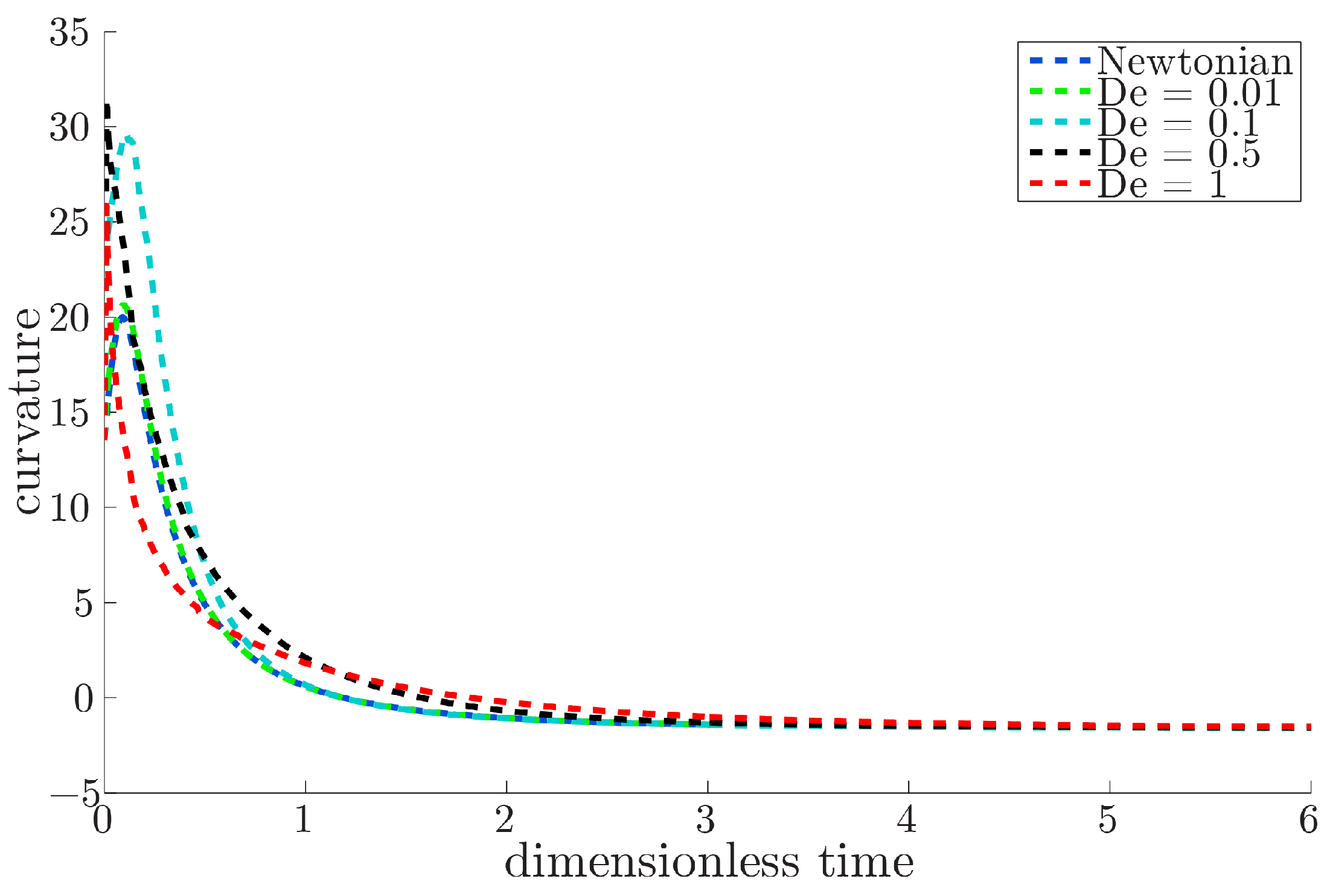
6.2. Effect of the Rheology
7. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Frenkel, J. Viscous flow of crystalline bodies under the action of surface tension. J. Phys. IX 1945, 5, 385–391. [Google Scholar]
- Eshelby, J. Discussion of ‘Seminar on the kinetics of sintering’. Metall. Trans. 1949, 185, 796–813. [Google Scholar]
- Pokluda, O.; Bellehumeur, C.; Vlachopoulos, J. Modification of Frenkel’s model for sintering. AIChE J. 1997, 43, 3253–3256. [Google Scholar] [CrossRef]
- Bellehumeur, C.; Kontopoulou, M.; Vlachopoulos, J. The role of viscoelasticity in polymer sintering. Rheol. Acta 1998, 37, 270–278. [Google Scholar] [CrossRef]
- Scribben, E.; Baird, D.; Wapperom, P. The role of transient rheology in polymeric sintering. Rheol. Acta 2006, 45, 825–839. [Google Scholar] [CrossRef]
- Hopper, R. Plane Stokes flow driven by capillarity on a free surface. J. Fluid Mech. 1990, 213, 349–375. [Google Scholar] [CrossRef]
- Richardson, S. Two-dimensional slow viscous flows with time-dependent free boundaries driven by surface tension. Eur. J. Appl. Math. 1992, 3, 193–207. [Google Scholar] [CrossRef]
- Crowdy, D. Exact solutions for the viscous sintering of multiply-connected fluid domains. J. Eng. Math. 2002, 42, 225–242. [Google Scholar] [CrossRef]
- Bellehumeur, C.; Bisaria, M.; Vlachopoulos, J. An experimental study and model assessment of polymer sintering. Polym. Eng. Sci. 1996, 36, 2198–2207. [Google Scholar] [CrossRef]
- Mazur, S.; Plazek, D. Viscoelastic effects in the coalescence of polymer particles. Prog. Org. Coat. 1994, 24, 225–236. [Google Scholar] [CrossRef]
- Ross, J.; Miller, W.; Weatherly, C. Dynamic computer simulation of viscous flow sintering kinetics. J. Appl. Phys. 1981, 52, 3884–3888. [Google Scholar] [CrossRef]
- Kuiken, H. Viscous sintering: the surface-tension-driven flow of a liquid form under the influence of curvature gradients at its surface. J. Fluid Mech. 1990, 214, 503–515. [Google Scholar] [CrossRef]
- Van de Vorst, G. Integral method for a two-dimensional Stokes flow with shrinking holes applied to viscous sintering. J. Fluid Mech. 1993, 257, 667–689. [Google Scholar] [CrossRef]
- Martínez-Herrera, J.; Derby, J. Analysis of capillary-driven viscous flows during the sintering of ceramic powders. AIChE J. 1994, 40, 1794–1803. [Google Scholar] [CrossRef]
- Jagota, A.; Dawson, P. Micromechanical modeling of powder compacts-I: Unit problems for sintering and traction induced deformation. Acta Metall. 1988, 36, 2551–2561. [Google Scholar] [CrossRef]
- Jagota, A.; Dawson, P. Simulation of the viscous sintering of two particles. J. Am. Ceram. Soc. 1990, 73, 173–177. [Google Scholar] [CrossRef]
- Van de Vorst, G. Numerical simulation of axisymmetric viscous sintering. Eng. Anal. Bound. Elem. 1994, 14, 193–207. [Google Scholar] [CrossRef]
- Martínez-Herrera, J.; Derby, J. Viscous sintering of spherical particles via finite element analysis. J. Am. Ceram. Soc. 1995, 78, 645–649. [Google Scholar] [CrossRef]
- Zhou, H.; Derby, J. Three-dimensional finite element analysis of viscous sintering. J. Am. Ceram. Soc. 1998, 81, 533–540. [Google Scholar] [CrossRef]
- Hooper, R.; Macosko, C.; Derby, J. Assessing a flow-based finite element model for the sintering of viscoelastic particles. Chem. Eng. Sci. 2000, 55, 5733–5746. [Google Scholar] [CrossRef]
- Verbeeten, W.; Peters, G.; Baaijens, F. Differential constitutive equations for polymer melts: The extended Pom-Pom model. J. Rheol. 2001, 45, 823–843. [Google Scholar] [CrossRef]
- Balemans, C.; Hulsen, M.; Anderson, P. Modeling of complex interfaces for pendant drop experiments. Rheol. Acta 2016, 55, 801–822. [Google Scholar] [CrossRef]
- Ellis, B.; Smith, R. Polymers: A Property Database; CRC Press: Boca Raton, FL, USA, 2008; ISBN 9780849339400. [Google Scholar]
- Wudy, K.; Drummer, D.; Drexler, M. Characterization of polymer materials and powders for selective laser melting. AIP Conf. Proc. 2014, 1593, 702–707. [Google Scholar] [CrossRef]
- Haworth, B.; Hopkinson, N.; Hitt, D.; Zhong, X. Shear viscosity measurements on Polyamide-12 polymers for laser sintering. Rapid Prototyp. J. 2013, 19, 28–36. [Google Scholar] [CrossRef]
- Villone, M.; Hulsen, M.; Anderson, P.; Maffettone, P. Simulations of deformable systems in fluids under shear flow using an arbitrary Lagrangian Eulerian technique. Comput. Fluids 2014, 90, 88–100. [Google Scholar] [CrossRef]
- Weatherburn, C. Differential Geometry of Three Dimensions; Cambridge University Press: Cambridge, UK, 1955; ISBN 9781316603840. [Google Scholar]
- Guénette, R.; Fortin, M. A new mixed finite element method for computing viscoelastic flows. J. Non-Newton. Fluid Mech. 1995, 60, 27–52. [Google Scholar] [CrossRef]
- Baaijens, F. Mixed finite element methods for viscoelastic flow analysis: A review. J. Non-Newton. Fluid Mech. 1998, 79, 361–385. [Google Scholar] [CrossRef]
- Bogaerds, A.; Grillet, A.; Peters, G.; Baaijens, F. Stability analysis of polymer shear flows using the extended Pom-Pom constitutive equations. J. Non-Newton. Fluid Mech. 2002, 108, 187–208. [Google Scholar] [CrossRef]
- Brooks, A.; Hughes, T. Streamline upwind/Petrov-Galerkin formulations for convection dominated flows with particular emphasis on the incompressible Navier-Stokes equations. Comput. Methods Appl. Mech. Eng. 1982, 32, 199–259. [Google Scholar] [CrossRef]
- Fattal, R.; Kupferman, R. Constitutive laws for the matrix-logarithm of the conformation tensor. J. Non-Newton. Fluid Mech. 2004, 123, 281–285. [Google Scholar] [CrossRef]
- Hulsen, M.; Fattal, R.; Kupferman, R. Flow of viscoelastic fluids past a cylinder at high Weissenberg number: Stabilized simulations using matrix logarithms. J. Non-Newton. Fluid Mech. 2005, 127, 27–39. [Google Scholar] [CrossRef]
- D’Avino, G.; Hulsen, M. Decoupled second-order transient schemes for the flow of viscoelastic fluids without a viscous solvent contribution. J. Non-Newton. Fluid Mech. 2010, 165, 1602–1612. [Google Scholar] [CrossRef]
- Geuzaine, C.; Remacle, J. Gmsh: A three-dimensional finite element mesh generator with built-in pre- and post-processing facilities. Int. J. Numer. Methods Eng. 2009, 79, 1309–1331. [Google Scholar] [CrossRef]
- Hu, H.; Patankar, N.; Zhu, M. Direct numerical simulations of fluid-solid systems using the arbitrary Lagrangian-Eulerian technique. J. Comput. Phys. 2001, 169, 427–462. [Google Scholar] [CrossRef]
- Dantzig, J.; Tucker, C. Modeling in Materials Processing; Cambridge University Press: Cambridge, UK, 2001; ISBN 9780521779234. [Google Scholar]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Symbol | Value | References |
|---|---|---|---|
| Density | [23,24] | ||
| Viscosity | ·s | [25] | |
| Surface tension | [24,25] | ||
| Relaxation time | [25] | ||
| Particle radius | R | [25] |
| Mesh | Number of Nodes on the Surface | ||
|---|---|---|---|
| M1 | 1.05 | 0.015 | 59 |
| M2 | 0.7 | 0.01 | 67 |
| M3 | 0.35 | 0.005 | 119 |
| M4 | 0.175 | 0.0025 | 223 |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Balemans, C.; Hulsen, M.A.; Anderson, P.D. Sintering of Two Viscoelastic Particles: A Computational Approach. Appl. Sci. 2017, 7, 516. https://doi.org/10.3390/app7050516
Balemans C, Hulsen MA, Anderson PD. Sintering of Two Viscoelastic Particles: A Computational Approach. Applied Sciences. 2017; 7(5):516. https://doi.org/10.3390/app7050516
Chicago/Turabian StyleBalemans, Caroline, Martien A. Hulsen, and Patrick D. Anderson. 2017. "Sintering of Two Viscoelastic Particles: A Computational Approach" Applied Sciences 7, no. 5: 516. https://doi.org/10.3390/app7050516
APA StyleBalemans, C., Hulsen, M. A., & Anderson, P. D. (2017). Sintering of Two Viscoelastic Particles: A Computational Approach. Applied Sciences, 7(5), 516. https://doi.org/10.3390/app7050516