Simultaneous Dual-Arm Motion Planning for Minimizing Operation Time


Abstract
1. Introduction
2. Materials and Methods
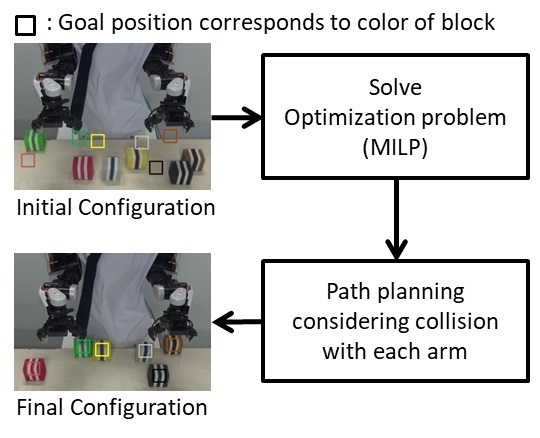
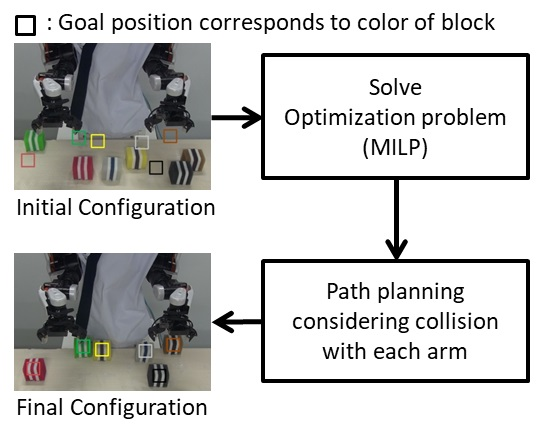
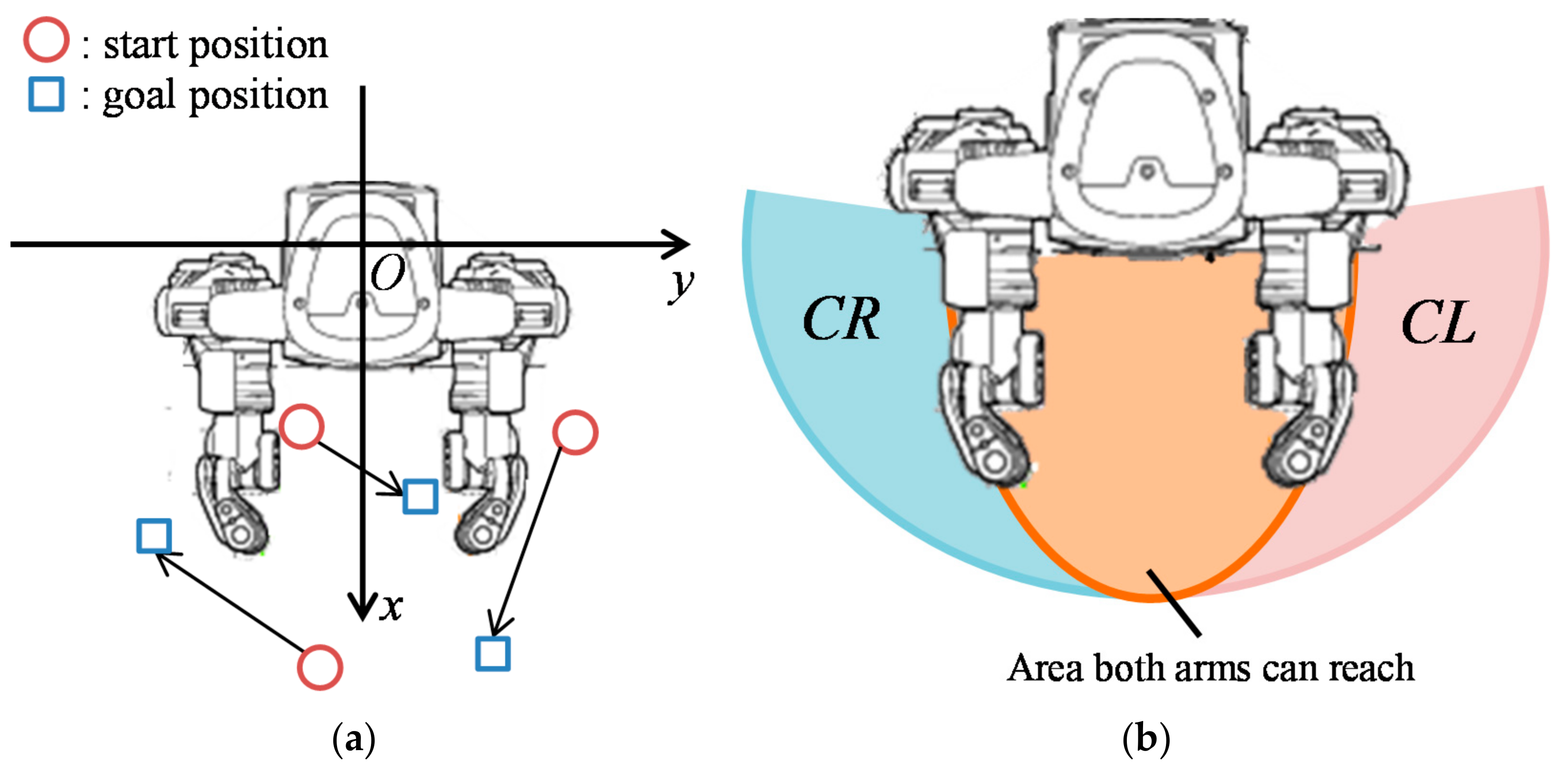
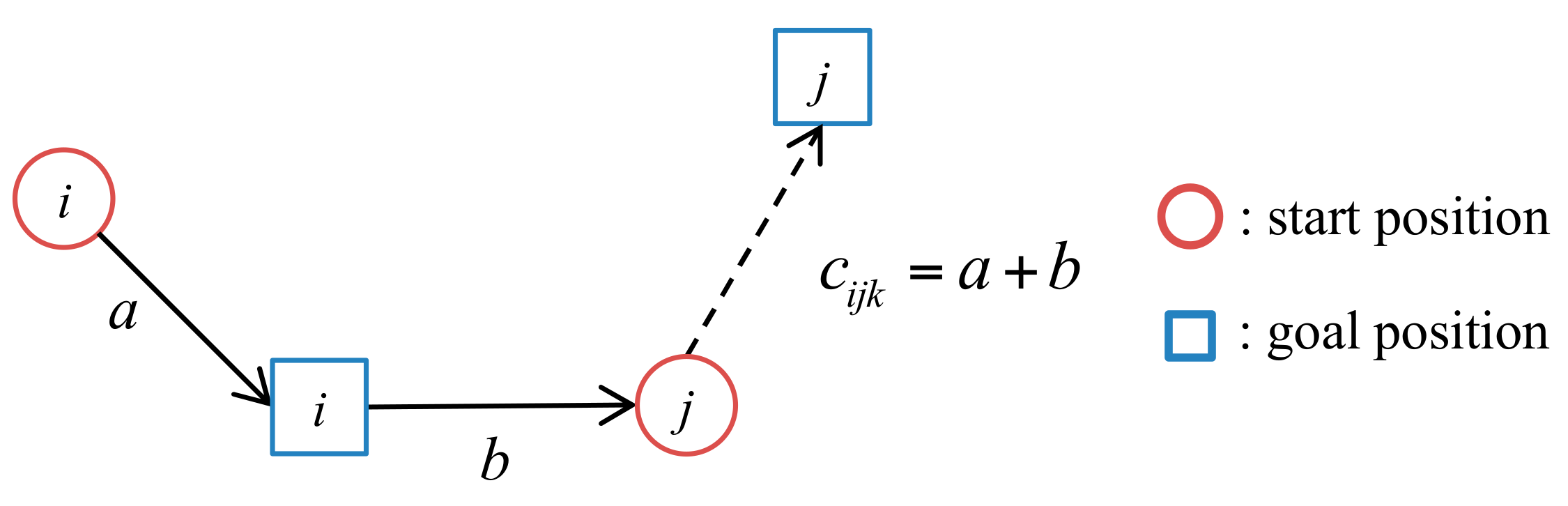
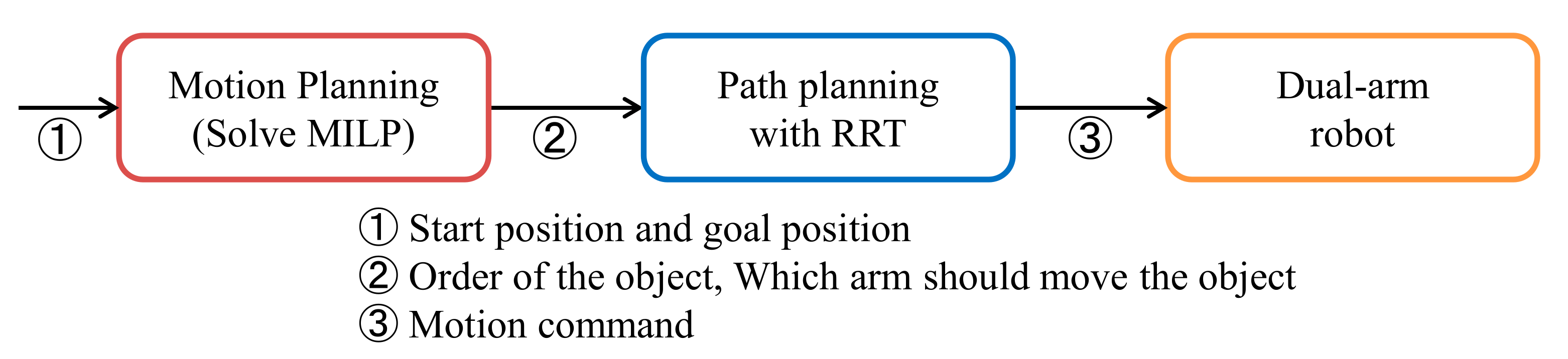
2.1. Formulation of the Pick-and-Place Work
2.2. Path Planning with RRT
3. Results and Discussion
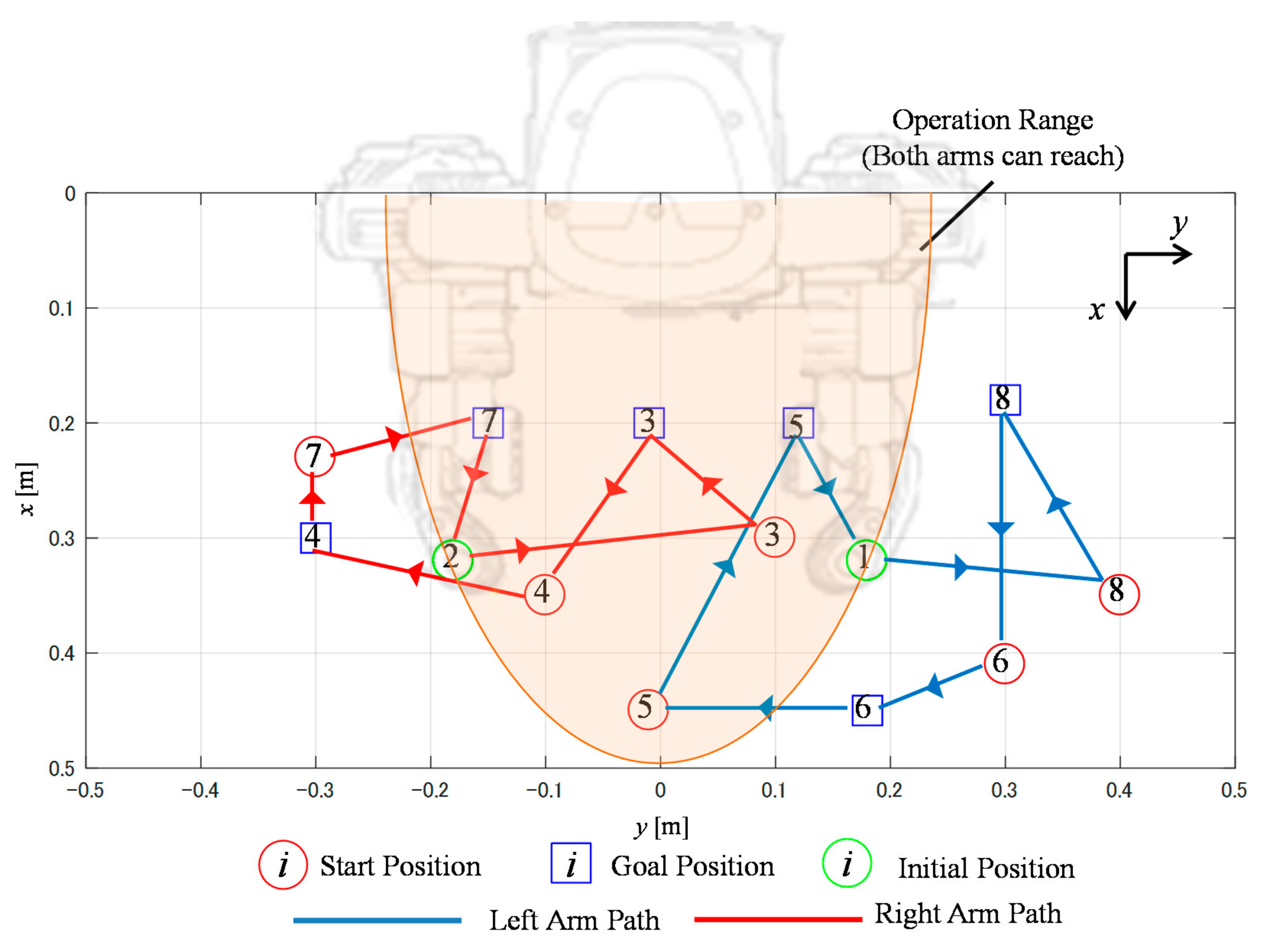
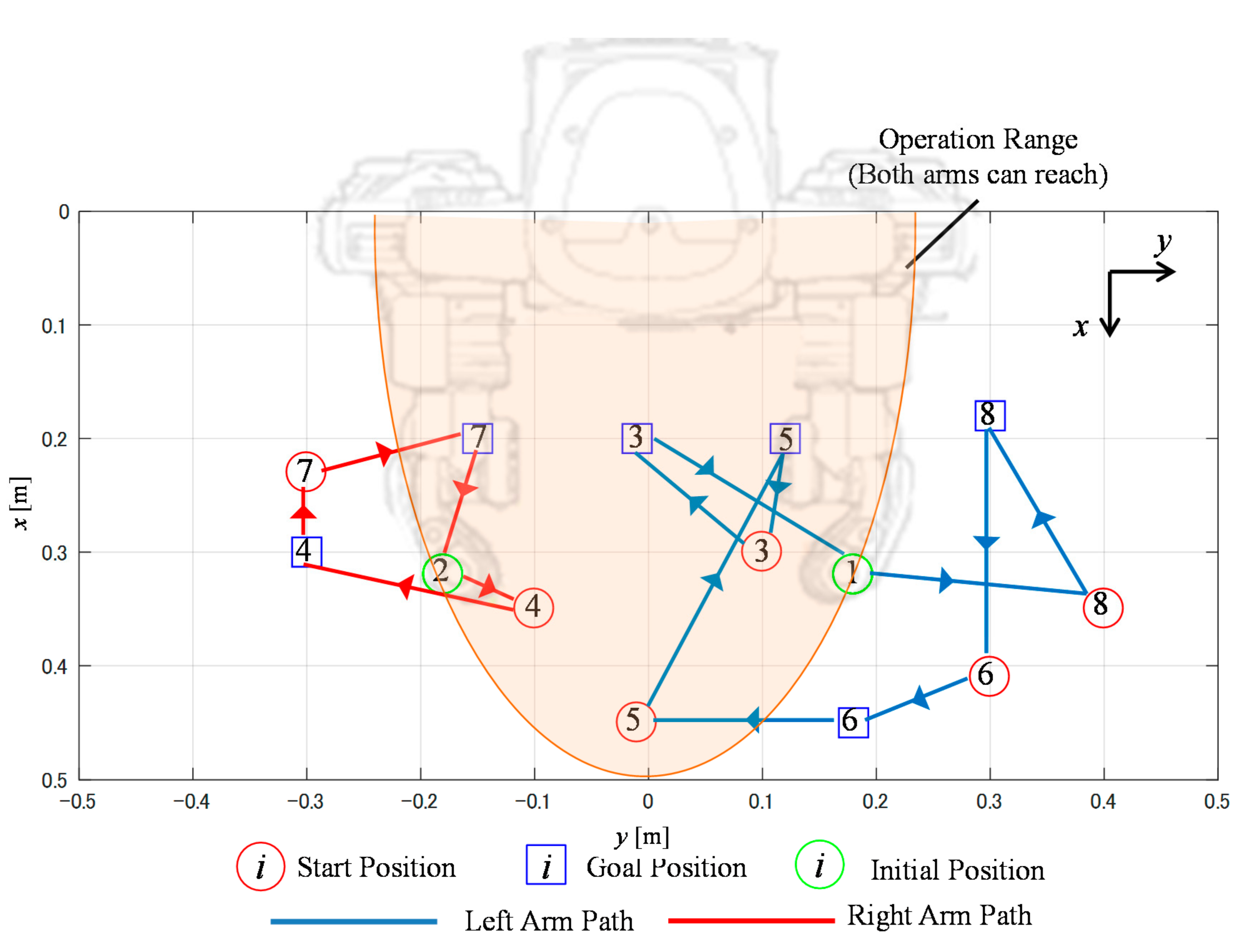
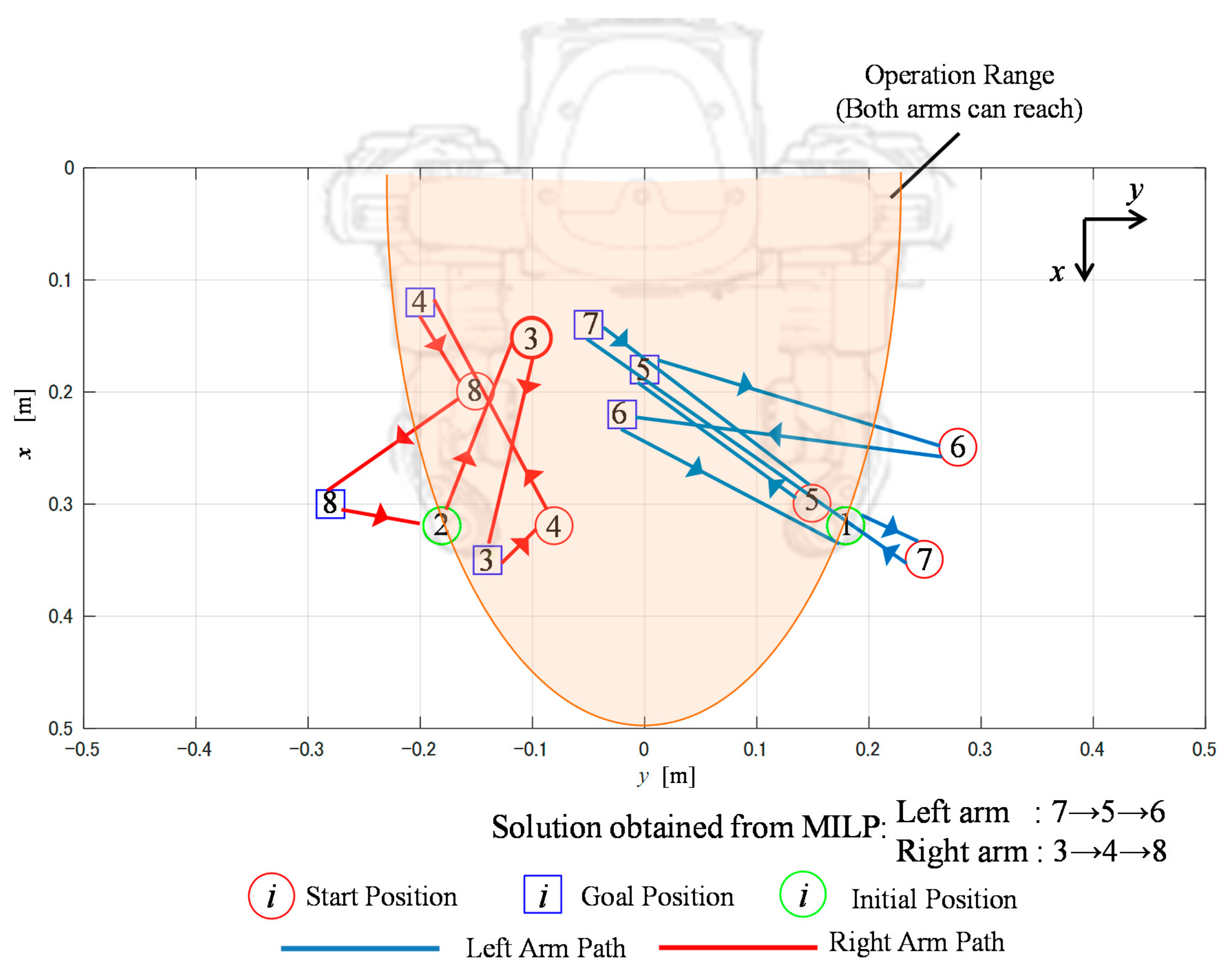
3.1. Simulation
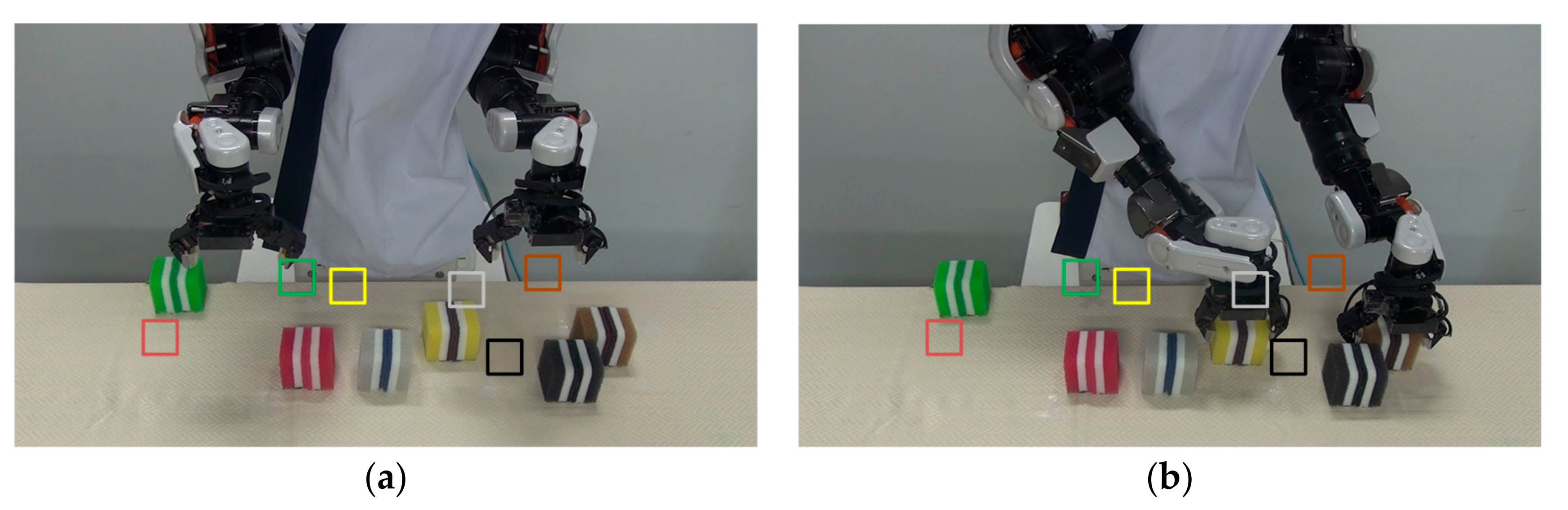
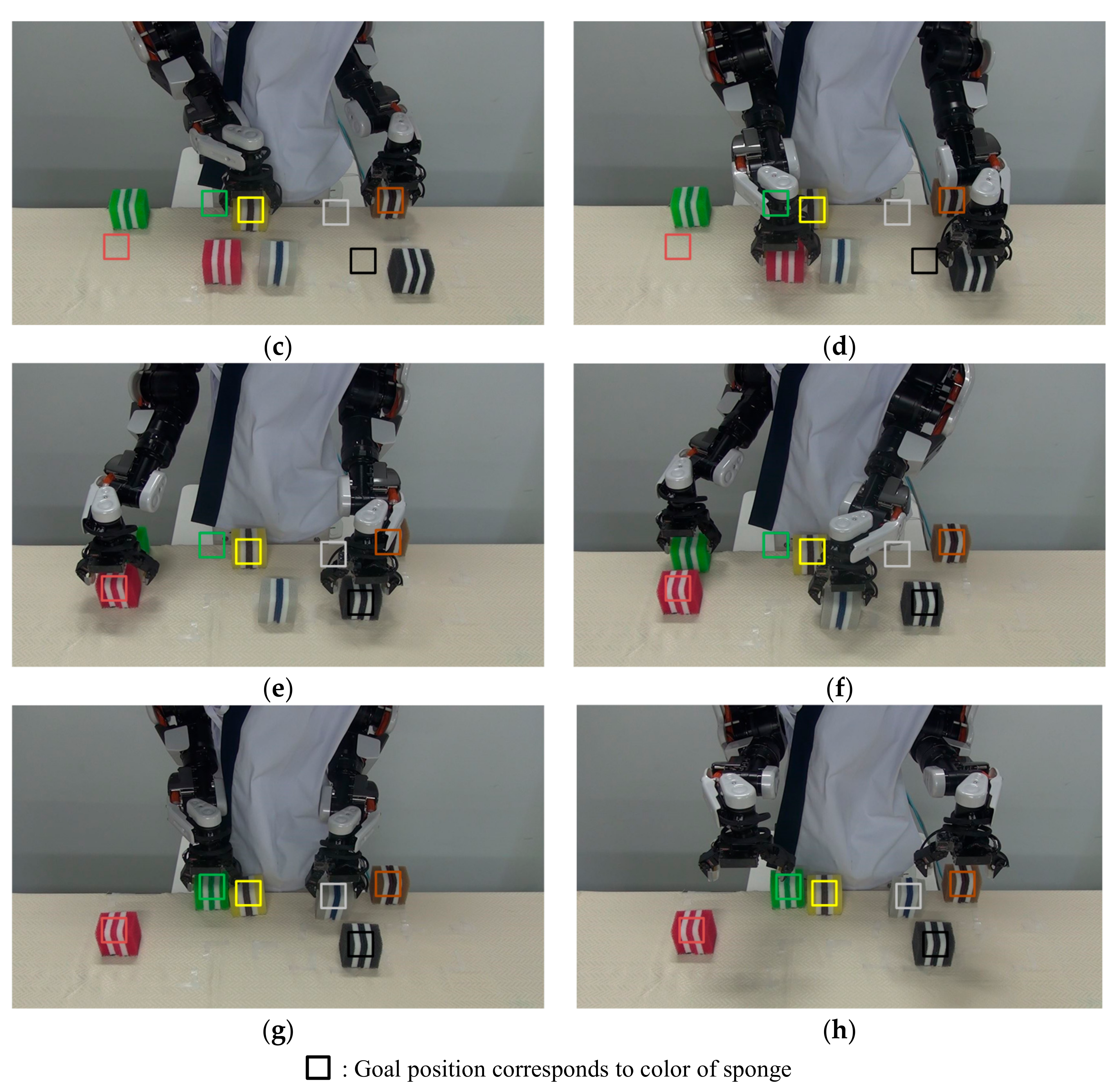
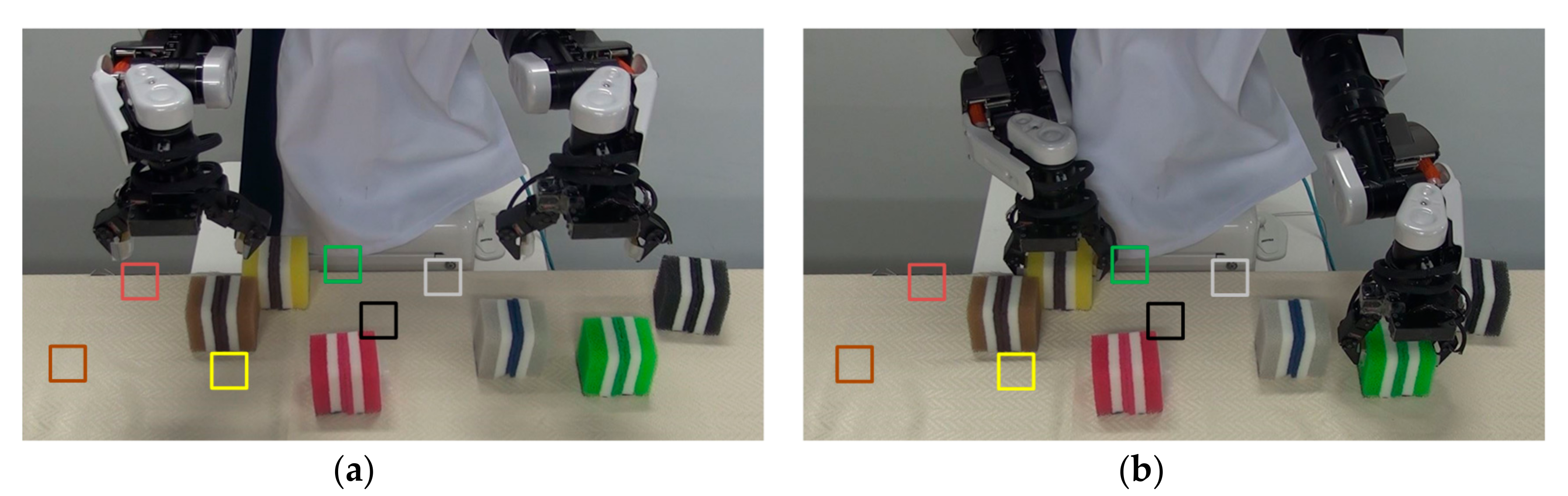
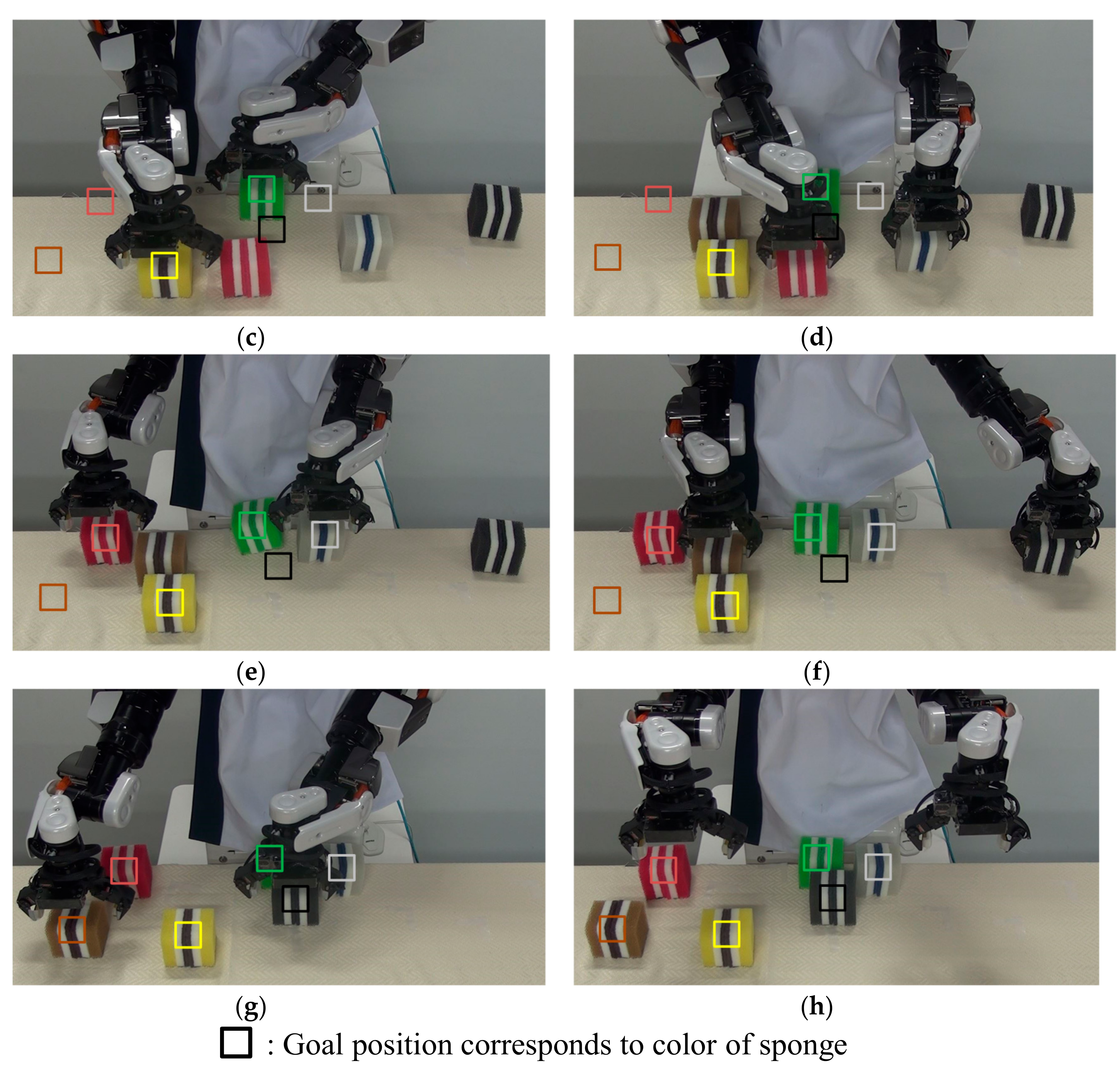
3.2. Experiment
3.2.1. Verification Experiment
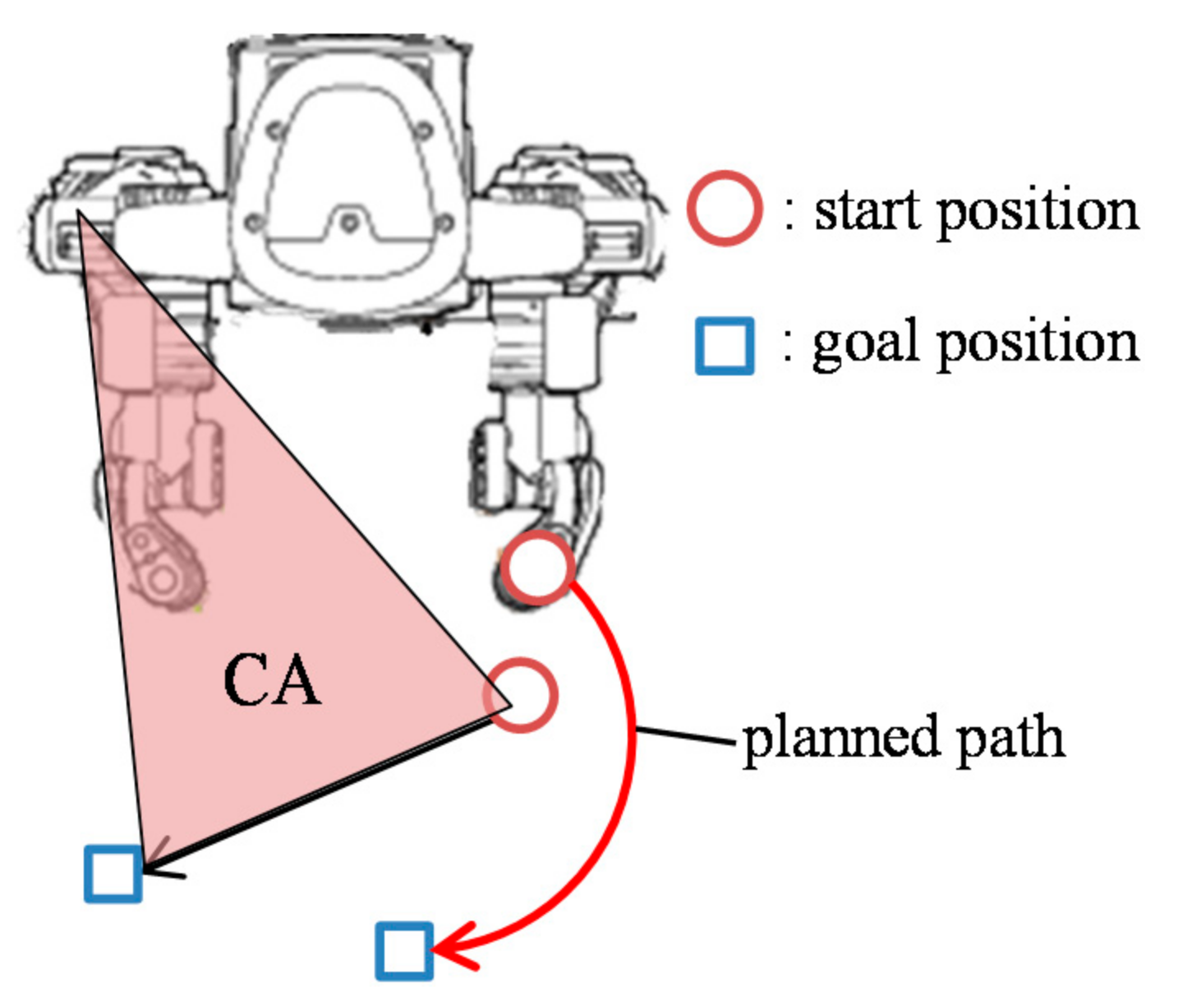
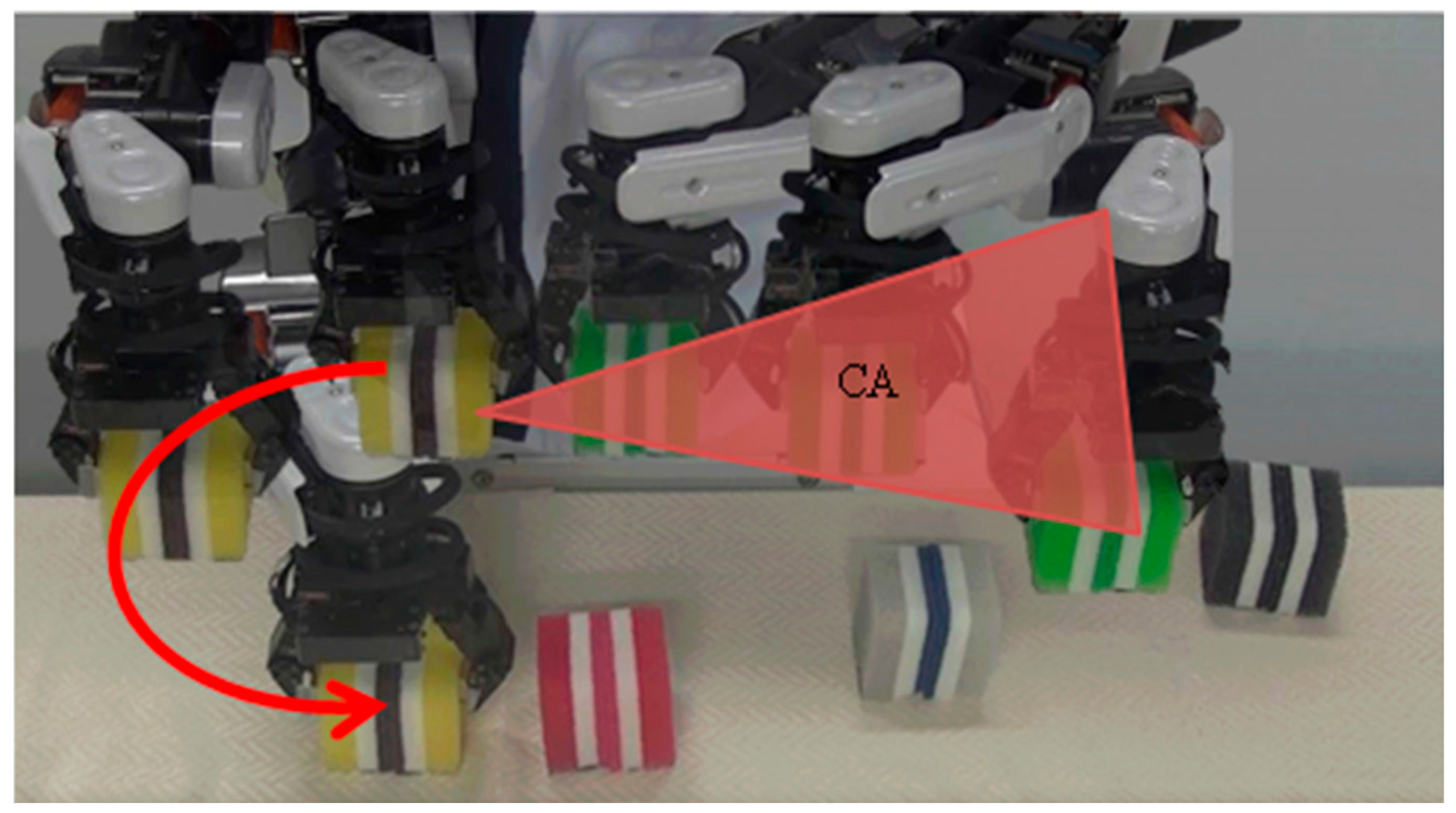
3.2.2. Collision Avoidance with Each Arm
3.3. Computation Time
4. Conclusions
Supplementary Materials
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Smith, C.; Karayiannidis, Y.; Nalpantidis, L.; Gratal, X.; Dimarogonas, P.; Qi, D.V.; Kragic, D. Dual arm manipulation—A survey. Robot. Auton. Syst. 2012, 60, 1340–1353. [Google Scholar]
- Dogar, M.; Srinivasa, S. A framework for push-grasping in clutter. In Proceedings of the Robotics: Science and Systems, Los Angeles, CA, USA, 27–30 June 2011; pp. 65–72. [Google Scholar]
- Berenson, D.; Srinivasa, S.; Ferguson, D.; Collet, A.; Kuffner, J. Manipulation Planning with Workspace Goal Regions. In Proceedings of the IEEE International Conference on Robotics and Automation, Kobe, Japan, 12–17 May 2009; pp. 618–624. [Google Scholar]
- Srivastava, S.; Fang, E.; Riano, L. Combined Task and Motion Planning Through an Extensible Planner-Independent Interface Layer. In Proceedings of the IEEE International Conference on Robotics and Automation, Hong Kong, China, 31 May–7 June 2014; pp. 639–646. [Google Scholar]
- Rodriguez, C.; Montano, A.; Suarez, R. Planning manipulation movements of dual-arm system considering obstacle removing. Robot. Auton. Syst. 2014, 62, 1816–1826. [Google Scholar] [CrossRef]
- Saut, J.; Gharbi, M.; Corte, J.; Sidobre, D.; Simeon, T. Planning Pick and Place tasks with two-hand regrasping. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems, Taipei, Taiwan, 18–22 October 2010; pp. 4528–4533. [Google Scholar]
- Huang, Y.; Gueta, B.; Chiba, R.; Arai, T.; Ueyama, T.; Ota, J. Selection of manipulator system for multiple-goal task by evaluating task completion time and cost with computational time constraints. Adv. Robot. 2013, 27, 233–245. [Google Scholar] [CrossRef]
- Hayne, R.; Luo, R.; Berenson, D. Considering avoidance and consistency in motion planning for human-robot manipulation in a shared workspace. In Proceedings of the IEEE International Conference on Robotics and Automation, Stockholm, Sweden, 16–21 May 2016; pp. 3948–3954. [Google Scholar]
- Garrett, C.R.; Lozano-Perez, T.; Kaelbling, L.P. Ffrob: An efficient heuristic for task and motion planning. Algorithmic Found. Robot. 2015, 6, 179–195. [Google Scholar]
- Gaschler, A.; Kessler, I.; Petrick, R.P.; Knoll, A. Extending the knowledge of volumes approach to robot task planning with efficient geometric predicates. In Proceedings of the IEEE International Conference on Robotics and Automation, Seattle, WA, USA, 26–31 May 2015; pp. 3061–3066. [Google Scholar]
- Bourbonnais, F.; Bigras, P.; Bonev, I.A. Minimum-time trajectory planning and control of a pick-and-place five-bar parallel robot. IEEE/ASME Trans. Mechatron. 2015, 20, 740–749. [Google Scholar] [CrossRef]
- Huang, Y.; Chiba, R.; Arai, T.; Ueyama, T.; Ota, J. Robust multi-robot coordination in pick-and-place tasks based on part-dispatching rules. Robot. Auton. Syst. 2015, 64, 70–83. [Google Scholar] [CrossRef]
- La Valle, S.M. Rapidly-Exploring Random Trees: A New Tool for Path Planning; Technical Report No. 98-11; Computer Science Department, Iowa State University: Ames, IA, USA, 1998. [Google Scholar]
- Kavraki, L.E.; Svestka, P.; Latombe, J.-C.; Overmars, M.H. Probabilistic roadmaps for path planning in high-dimensional configuration space. IEEE Trans. Robot. Autom. 1996, 12, 566–580. [Google Scholar] [CrossRef]
- La Valle, S.M.; Kuffer, J. Randomized kinodynamic planning. Int. J. Robot. Res. 2011, 20, 378–400. [Google Scholar] [CrossRef]
- Baumann, M.; Leonard, S.; Croft, E.A.; Little, J.J. Path planning for improved visibility using a probabilistic road map. IEEE Trans. Robot. 2010, 26, 195–200. [Google Scholar] [CrossRef]
- Bektas, T. The multiple traveling salesman problem: An overview of formulations and solution procedures. Omega 2006, 34, 209–219. [Google Scholar] [CrossRef]
- Kara, I.; Bektas, T. Integer linear programming formulations of multiple salesman problem and its variations. Eur. J. Oper. Res. 2006, 174, 1449–1458. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Object ID (Task) | Start Positions | Goal Positions |
|---|---|---|
| 1 | (0.32, 0.18) | - |
| 2 | (0.32, −0.18) | - |
| 3 | (0.30, 0.10) | (0.20, −0.01) |
| 4 | (0.35, −0.10) | (0.30, −0.30) |
| 5 | (0.45, −0.01) | (0.20, 0.12) |
| 6 | (0.41, 0.30) | (0.45, 0.18) |
| 7 | (0.23, −0.30) | (0.20, −0.15) |
| 8 | (0.35, 0.40) | (0.18, 0.30) |
| Type of Path Length | Comparative | Proposal |
|---|---|---|
| Left arm | 1.69 | 1.35 |
| Right arm | 0.64 | 1.15 |
| Difference | 1.05 | 0.20 |
| Total | 2.33 | 2.50 |
| Object ID (Task) | 3 | 4 | 5 | 6 | 7 | 8 |
|---|---|---|---|---|---|---|
| color | yellow | red | grey | black | green | brown |
| Type of The Arms | Comparative | Proposal |
|---|---|---|
| Left arm | 8→6→5→3 | 8→6→5 |
| Right arm | 4→7 | 3→4→7 |
| Object ID (Task) | Start Positions | Goal Positions |
|---|---|---|
| 1 | (0.32, 0.18) | - |
| 2 | (0.32, −0.18) | - |
| 3 | (0.15, −0.10) | (0.35, −0.14) |
| 4 | (0.32, −0.08) | (0.12, −0.20) |
| 5 | (0.30, 0.15) | (0.18, 0.00) |
| 6 | (0.25, 0.28) | (0.22, −0.02) |
| 7 | (0.35, 0.25) | (0.14, −0.05) |
| 8 | (0.20, −0.15) | (0.30, −0.28) |
| n | Computation Time (s) |
|---|---|
| 6 | |
| 7 | |
| 8 |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kurosu, J.; Yorozu, A.; Takahashi, M. Simultaneous Dual-Arm Motion Planning for Minimizing Operation Time. Appl. Sci. 2017, 7, 1210. https://doi.org/10.3390/app7121210
Kurosu J, Yorozu A, Takahashi M. Simultaneous Dual-Arm Motion Planning for Minimizing Operation Time. Applied Sciences. 2017; 7(12):1210. https://doi.org/10.3390/app7121210
Chicago/Turabian StyleKurosu, Jun, Ayanori Yorozu, and Masaki Takahashi. 2017. "Simultaneous Dual-Arm Motion Planning for Minimizing Operation Time" Applied Sciences 7, no. 12: 1210. https://doi.org/10.3390/app7121210
APA StyleKurosu, J., Yorozu, A., & Takahashi, M. (2017). Simultaneous Dual-Arm Motion Planning for Minimizing Operation Time. Applied Sciences, 7(12), 1210. https://doi.org/10.3390/app7121210