
Parallel Direct Solution of Flexible Multibody Systems Based on Block Gaussian Elimination


Abstract
1. Introduction
2. Flexible Multibody Formulation with the Craig–Bampton Method
2.1. Time Integration Procedures of Flexible Multibody Systems
2.1.1. System Governing Equations
2.1.2. Time Integration Scheme
2.1.3. Equation Linearization and Assembly
2.2. Flexible Body Formulation with the Craig–Bampton Method
2.2.1. DOFs Reduction by the Craig–Bampton Method
2.2.2. Rigid Modes Removing and Modes Orthogonalization
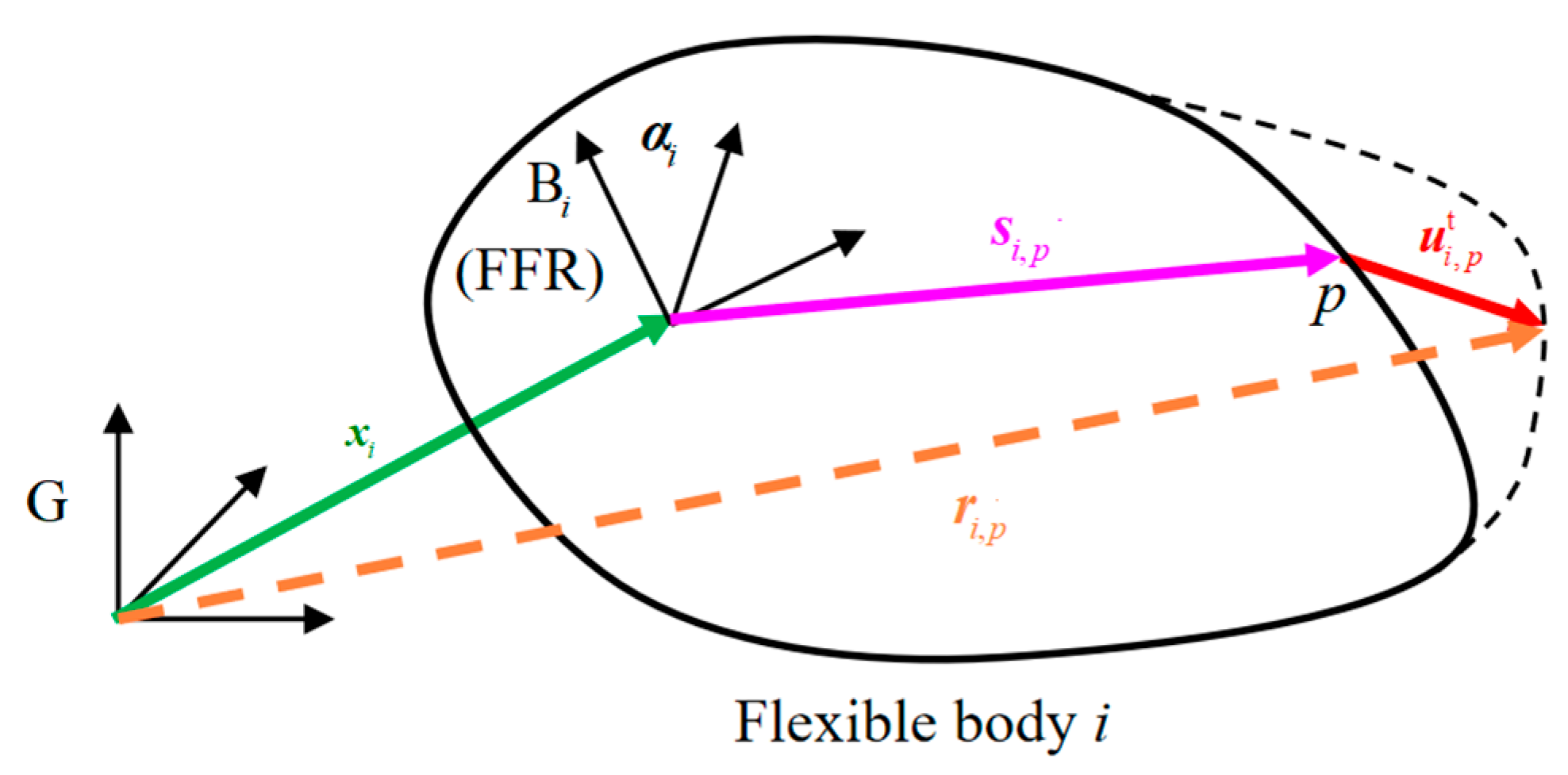
2.2.3. Flexible Body Formulation Under Floating Frame of Reference
3. Parallel Direct Solution Scheme Based on Block Gaussian Elimination
3.1. Coordinate Reordering Before BGE
3.2. Feasibility Study of BGE on Sub-Block Jacobian Matrix
3.3. Algorithm-Level Parallel Direct Solution of System Linear Equations Based on BGE
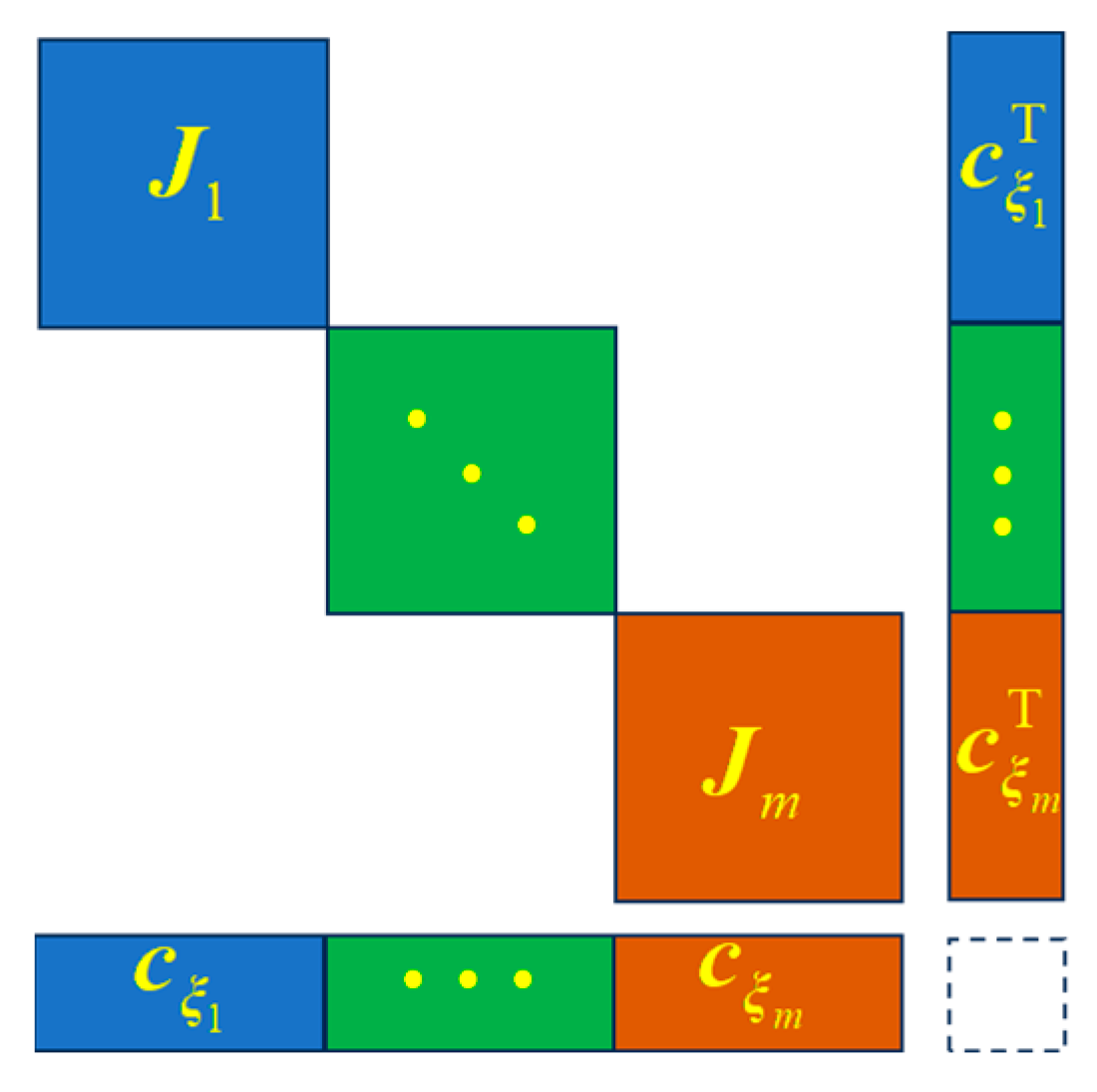
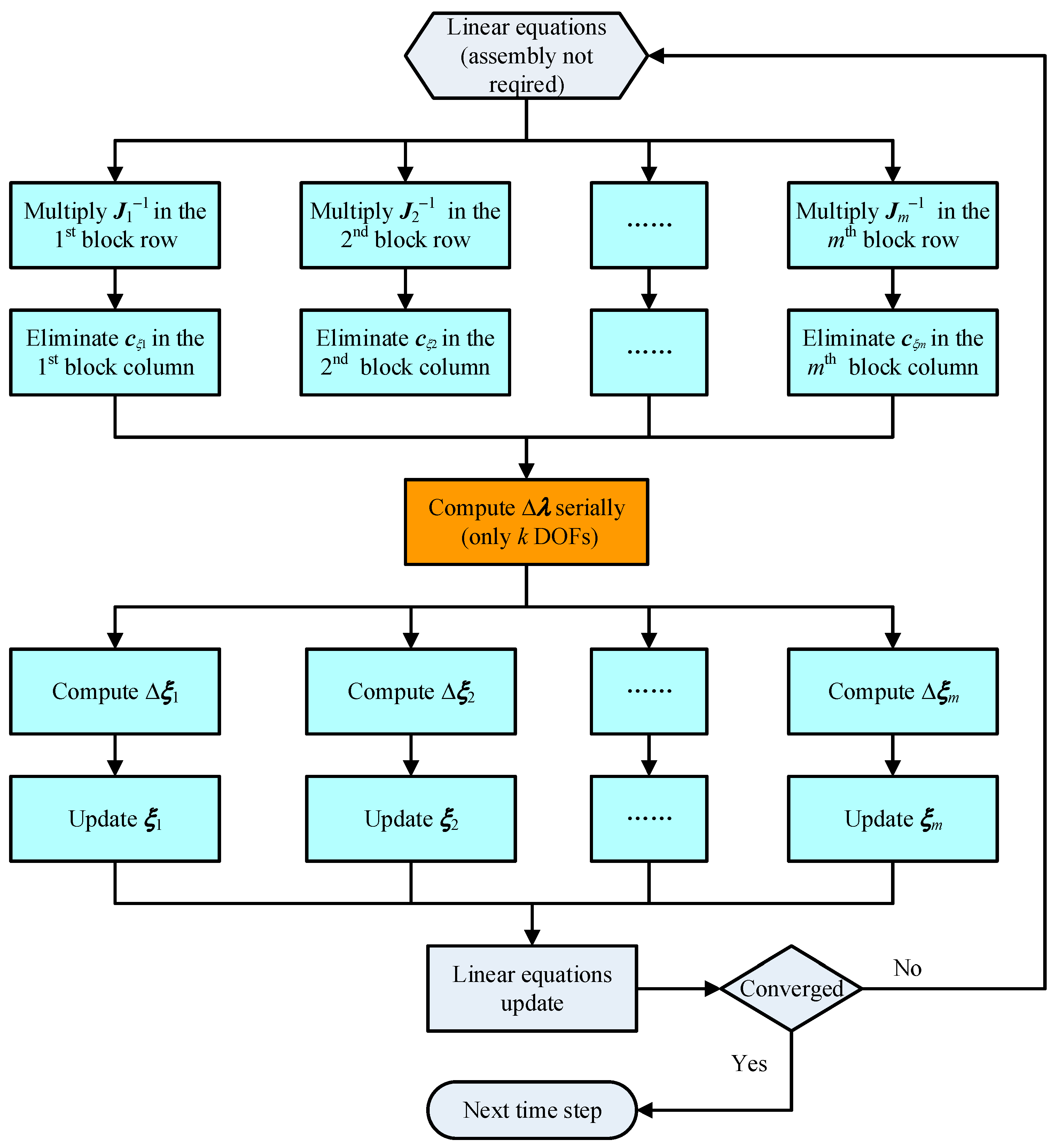
- Step ①: Each block row corresponding to the submatrix is left-multiplied by the Gaussian eliminator in parallel to obtain
- Step ②: Each constraint Jacobian matrix in the lower-left is eliminated in parallel by the unit matrix in the top-left, resulting in the Schur’s complement in the subspace of Lagrange multiplier , thus forming
- Step ③: The linear equations within the Lagrange multiplier subspace are solved to obtain the multiplier increment as
- Step ④: Substitute back into Equation (53) to obtain the increments in parallel for all bodies. With the known and in Step ②, general coordinate increments of bodies are
- Step ⑤: Update the general coordinates by the residual increments in parallel for all bodies and constraints. Since the time step and the iteration superscript are omitted in Formulas (51)–(55), we restore it to update the Newton iteration as
4. Numerical Examples
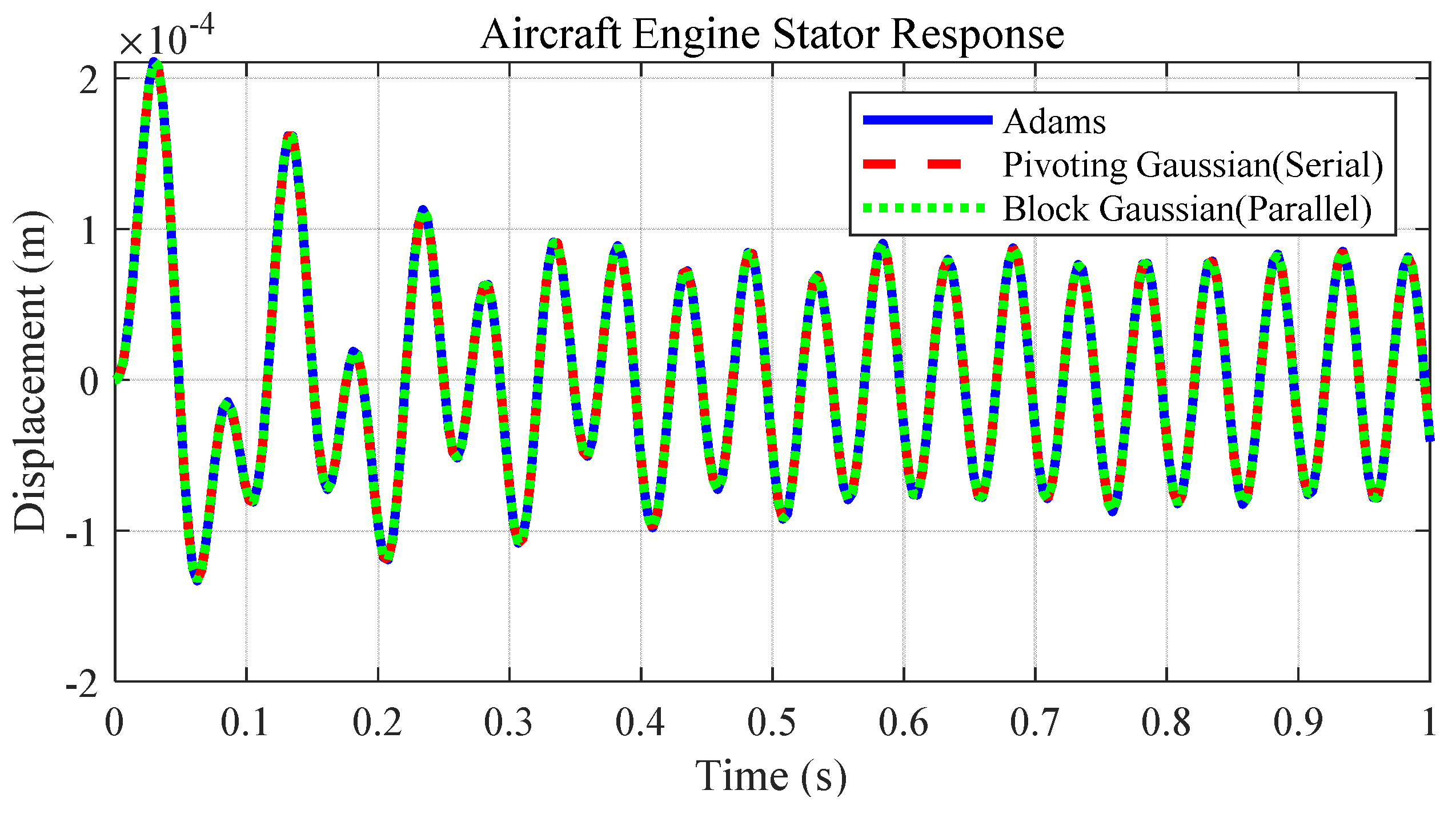
4.1. Example of an Aeroengine Stator System
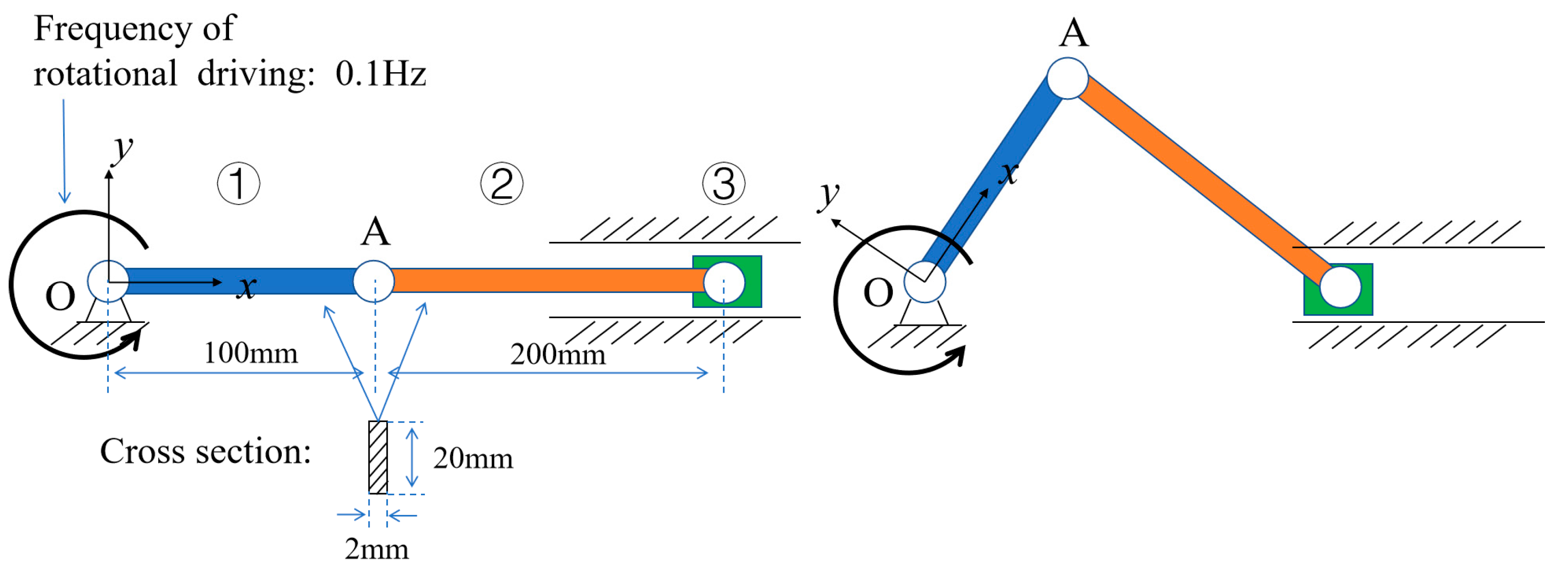
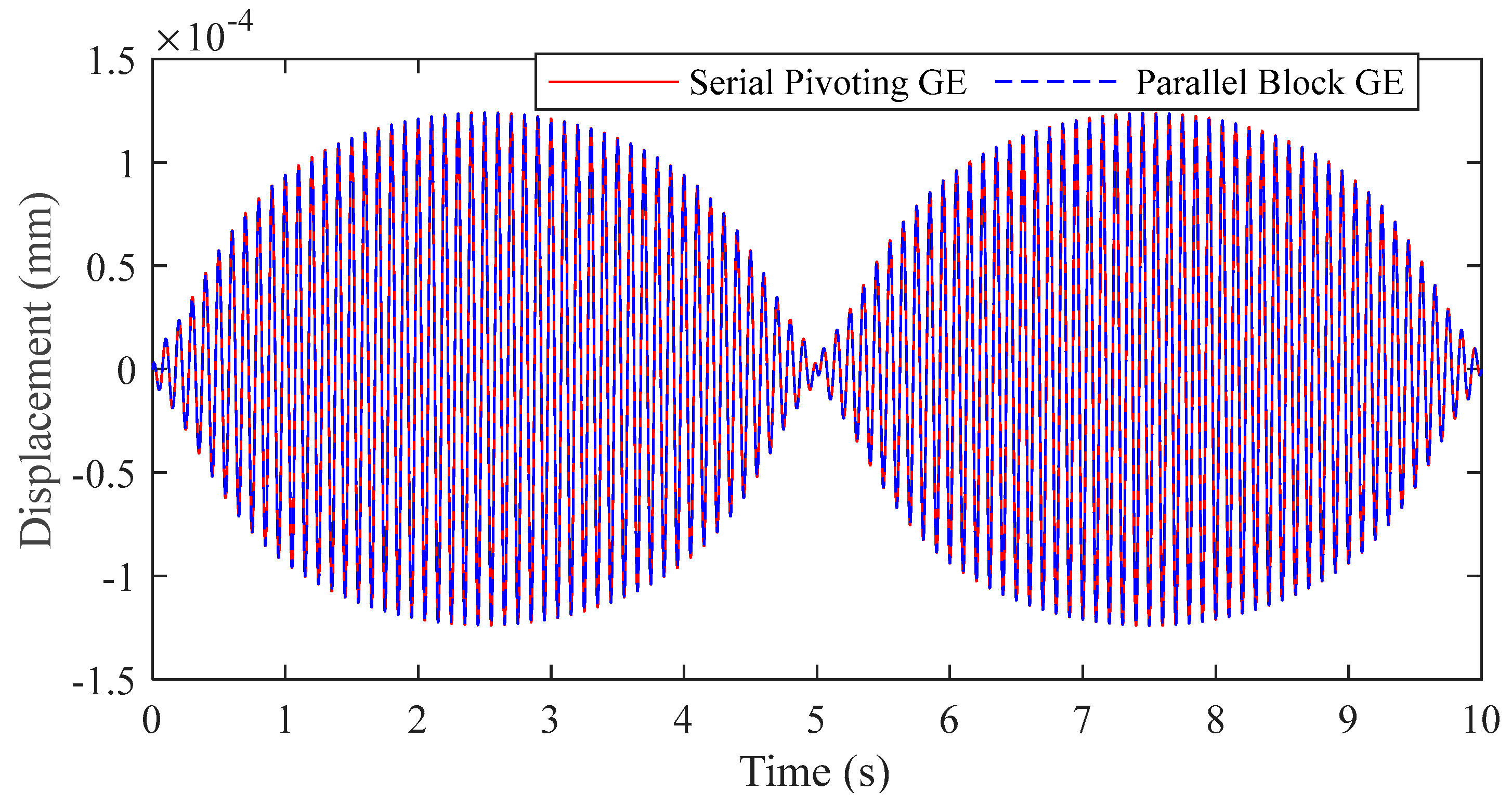
4.2. Sample of a Low-Speed Rotating Crank-Slider Mechanism
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Nomenclature
| Zero vector or zero matrix | |
| Constraints scale factor for numerical conditioning | |
| Transformation matrix from body-fixed frame to global frame | |
| Rotation parameters from global frame to body-fixed frame | |
| Residual of body general force equations | |
| Body-fixed coordinate frame (also the FFR) of flexible body | |
| Complete constraints in system | |
| System damping matrix | |
| Damping matrix of body | |
| Partial derivative of corresponding to , i.e., | |
| time step | |
| time step | |
| when there is no ambiguity | |
| when there is no ambiguity | |
| Block-diagonal matrix composed of submatrices | |
| Error thresholds for displacement variables, constraint forces, body force equation residuals, and constraint equation residuals | |
| Velocity’s algebraic function for time integration with BDFs | |
| Acceleration’s algebraic function for time integration with BDFs | |
| External force applied to the boundary DOFs in FE equations | |
| General inertial forces | |
| General elastic forces | |
| low-frequency mode of flexible body | |
| Elastic modes of the CB method (orthogonal and non-zero frequency) | |
| Preserved modes matrix of body | |
| Non-zero-frequency reorthogonalized modal matrix | |
| Boundary modes matrix of body | |
| Preserved vibration modes matrix of body | |
| Components of the modes matrix at node | |
| Global coordinate frame | |
| Proportional modal damping coefficient | |
| Time step size | |
| Moment of inertia lumped at node of body | |
| Serial number for bodies in the system | |
| Modal invariant submatrices in the modal neutral file | |
| System Jacobian matrix | |
| Jacobian matrix of body | |
| Submatrix of corresponding to rows DOFs “*” and column DOFs “#”, “f” for flexible modes, “t” for rigid translation, “r” for rigid rotation, “R” for rigid translation and rotation | |
| Total number of constraint equations in the system | |
| Stiffness matrix of system | |
| Stiffness matrix of body | |
| Stiffness matrix of finite element equations | |
| Lagrange function of system | |
| Lagrangian multipliers of constraints | |
| Value of | |
| Total number of bodies in the system | |
| Lumped mass at node of body | |
| Mass matrix of system | |
| Number of boundary modes of body | |
| Mass matrix of body | |
| Mass matrix of finite element equations of body | |
| Submatrix of corresponding to rows DOFs “*” and column DOFs “#”, “f” for flexible modes, “t” for rigid translation, “r” for rigid rotation, “R” for rigid translation and rotation | |
| Number of preserve low-frequency modes of body | |
| Total number of flexible modes after rigid modes removing and modes orthogonalization of body | |
| Diagonal matrix of modal circle frequencies of body | |
| modal circle frequency of flexible body | |
| Local angular velocity of the body-fixed frame | |
| An FE node on the flexible body | |
| boundary mode of flexible body | |
| Modal coordinates of the flexible body (excluding zero-frequency modes and ensuring orthogonality) | |
| Redundant modal coordinates of the flexible body (including zero-frequency modes) | |
| Global position of node of flexible body | |
| Original position of node of flexible body | |
| Simulation time | |
| General force vector of external loads | |
| Kinetic energy of system | |
| Finite element DOFs of flexible body | |
| Translational displacement of node due to flexible deformation of flexible body | |
| Inner DOFs of flexible body within the FE formulation | |
| Boundary DOFs of flexible body within the FE formulation | |
| Potential energy of system | |
| Global velocity of node of flexible body | |
| Position vector from global frame to body-fixed frame in global frame | |
| General displacement of bodies | |
| General velocity and acceleration of bodies | |
| Initial value of time step | |
| Value of | |
| General displacement of body | |
| Value of | |
| “;” | Separator of components in a “column” vector |
| for | |
| for | |
| time step for in the Newton iteration | |
| time step for | |
| Vector transpose or matrix transpose of | |
| Inner DOFs components in the Craig–Bampton method for | |
| Boundary DOFs components in the Craig–Bampton method for |
References
- Simeon, B. Computational Flexible Multibody Dynamics. A Differential-Algebraic Approach; Springer: Berlin/Heidelberg, Germany, 2013. [Google Scholar]
- Shabana, A.A. Dynamics of Multibody Systems; Wiley: New York, NY, USA, 1989. [Google Scholar]
- Craig, R.R.J. Substructure methods in vibration. J. Mech. Des. 1995, 117, 207–213. [Google Scholar] [CrossRef]
- Song, J.O.; Haug, E.J. Dynamic analysis of planar flexible mechanisms. Comput. Methods Appl. Mech. Eng. 1980, 24, 359–381. [Google Scholar] [CrossRef]
- Hurty, W.C. Dynamic analysis of structural systems using component modes. AIAA J. 1965, 3, 678–685. [Google Scholar] [CrossRef]
- Bampton, M.C.C.; Craig, J.R.R. Coupling of substructures for dynamic analyses. AIAA J. 1968, 6, 1313–1319. [Google Scholar]
- Hou, S.N. Review of Modal Synthesis Techniques and a New Approach; NASA: Washington, DC, USA, 1969. [Google Scholar]
- Macneal, R.H. A hybrid method of component mode synthesis. Comput. Struct. 1971, 1, 581–601. [Google Scholar] [CrossRef]
- Rubin, S. Improved component-mode representation for structural dynamic analysis. AIAA J. 1975, 13, 995–1006. [Google Scholar] [CrossRef]
- Kim, J.G.; Lee, P.S. An enhanced craig–bampton method. Int. J. Numer. Methods Eng. 2015, 103, 79–93. [Google Scholar] [CrossRef]
- Kim, J.G.; Park, Y.J.; Lee, G.H.; Kim, D.N. A general model reduction with primal assembly in structural dynamics. Comput. Methods Appl. Mech. Eng. 2017, 324, 1–28. [Google Scholar] [CrossRef]
- Kim, J.G.; Han, J.B.; Lee, H.; Kim, S.S. Flexible multibody dynamics using coordinate reduction improved by dynamic correction. Multibody Syst. Dyn. 2018, 42, 411–429. [Google Scholar] [CrossRef]
- Han, J.B.; Kim, J.G.; Kim, S.S. An efficient formulation for flexible multibody dynamics using a condensation of deformation coordinates. Multibody Syst. Dyn. 2019, 47, 293–316. [Google Scholar] [CrossRef]
- Wanner, G.; Hairer, E. Solving Ordinary Differential Equations II; Springer: Berlin/Heidelberg, Germany; New York, NY, USA, 1996; Volume 375. [Google Scholar]
- Yang, C.; Du, J.; Cheng, Z.; Wu, Y.; Li, C. Flexibility investigation of a marine riser system based on an accurate and efficient modelling and flexible multibody dynamics. Ocean Eng. 2020, 207, 107407. [Google Scholar] [CrossRef]
- Park, K.C.; Downer, J.D.; Chiou, J.C.; Farhat, C. A modular multibody analysis capability for high-precision, active control and real-time applications. Int. J. Numer. Methods Eng. 1991, 32, 1767–1798. [Google Scholar] [CrossRef]
- Cao, D.Z.; Qiang, H.F.; Ren, G.X. Parallel computing studies of flexible multibody system dynamics using OpenMP and Pardiso. J. Tsinghua Univ. Sci. Technol. 2012, 52, 1643–1649. [Google Scholar]
- Dagum, L.; Menon, R. OpenMP: An industry standard API for shared-memory programming. J. IEEE Comput. Sci. Eng. 1998, 5, 46–55. [Google Scholar] [CrossRef]
- Negrut, D.; Tasora, A.; Mazhar, H.; Heyn, T.; Hahn, P. Leveraging parallel computing in multibody dynamics. Multibody Syst. Dyn. 2012, 27, 95–117. [Google Scholar] [CrossRef]
- Negrut, D.; Serban, R.; Mazhar, H.; Heyn, T. Parallel computing in multibody system dynamics: Why, when, and how. J. Comput. Nonlinear Dyn. 2014, 9, 041007. [Google Scholar] [CrossRef]
- Pařík, P.; Kim, J.G.; Isoz, M.; Ahn, C.U. A parallel approach of the enhanced Craig–Bampton method. Mathematics 2021, 9, 3278. [Google Scholar] [CrossRef]
- Cros, J.M. Parallel modal synthesis methods in structural dynamics. Contemp. Math. 1998, 218, 492–499. [Google Scholar]
- Murthy, P.; Poschmann, P.; Reymond, M.; Schartz, P.; Wilson, C.T. Automated Component Modal Synthesis with Parallel Processing. 2000. Available online: http://www.mscsoftware.com/support/library/conf/auto00/p03900.pdf (accessed on 22 October 2024).
- Li, P.; Liu, C.; Tian, Q.; Hu, H.Y.; Song, Y.P. Dynamics of a deployable mesh reflector of satellite antenna: Parallel computation and deployment simulation. J. Comput. Nonlinear Dyn. 2016, 11, 061005. [Google Scholar] [CrossRef]
- Featherstone, R. A divide-and-conquer articulated-body algorithm for parallel O(log(n)) calculation of rigid-body dynamics. Part 1: Basic algorithm. Int. J. Robot. Res. 1999, 18, 876–892. [Google Scholar] [CrossRef]
- Dewes, E.M.; Rixen, D.J. Time integration of multibody systems using nonlinear domain decomposition techniques with mixed interface conditions. In Proceedings of the 5th Joint International Conference on Multibody System Dynamics, Lisboa, Portugal, 24–28 June 2018. [Google Scholar]
- Cano, J.C.; Cuenca, J.; Giménez, D.; Saura-Sánchez, M.; Segado-Cabezos, P. A parallel simulator for multibody systems based on group equations. J. Supercomput. 2019, 75, 1368–1381. [Google Scholar] [CrossRef]
- Wasfy, T.M.; Noor, A.K. Computational strategies for flexible multibody systems. Appl. Mech. Rev. 2003, 56, 553–613. [Google Scholar] [CrossRef]
- Higham, N.J. Gaussian elimination. Wiley Interdiscip. Rev. Comput. Stat. 2011, 3, 230–238. [Google Scholar] [CrossRef]
- Peiret, A.; Andrews, S.; Kövecses, J.; Kry, P.G.; Teichmann, M. Schur complement-based substructuring of stiff multibody systems with contact. ACM Trans. Graph. 2019, 38, 1–17. [Google Scholar] [CrossRef]
- Yang, C.; Cao, D.Z.; Zhao, Z.H.; Zhang, Z.R.; Ren, G.X. A direct eigenanalysis of multibody system in equilibrium. J. Appl. Math. 2012, 2012, 1–7. [Google Scholar] [CrossRef]
- Wang, G.X.; Niu, Z.P.; Feng, Y. Improved Craig–Bampton Method Implemented into Durability Analysis of Flexible Multibody Systems. Actuators 2023, 12, 65. [Google Scholar] [CrossRef]
- Ryan, R.R. ADAMS—Multibody system analysis software. In Multibody Systems Handbook; Springer: Berlin/Heidelberg, Germany, 1990; pp. 361–402. [Google Scholar]
- Pan, V.Y.; Zhao, L. Numerically safe Gaussian elimination with no pivoting. Linear Algebra Its Appl. 2017, 527, 349–383. [Google Scholar] [CrossRef]
- Strawderman, R.L.; Higham, N.J. Accuracy and stability of numerical algorithms. J. Am. Stat. Assoc. 1999. [Google Scholar] [CrossRef]
- Bender, J.; Erleben, K.; Trinkle, J. Interactive simulation of rigid body dynamics in computer graphics. Comput. Graph. Forum 2014, 33, 246–270. [Google Scholar] [CrossRef]
- Golub, G.H.; Greif, C. On solving block-structured indefinite linear systems. SIAM J. Sci. Comput. 2003, 24, 2076–2092. [Google Scholar] [CrossRef]
- Faugère, J.C.; Lachartre, S. Parallel Gaussian elimination for Gröbner bases computations in finite fields. In Proceedings of the International Workshop on Parallel Symbolic Computation, Grenoble, France, 21–23 July 2010. [Google Scholar]
- Peng, R.; Vempala, S. Solving sparse linear systems faster than matrix multiplication. In Proceedings of the Symposium on Discrete Algorithms, Virtual, 10–13 January 2021. [Google Scholar]
- Sewell, G. Computational Methods of Linear Algebra; World Scientific Publishing Company: Singapore, 2014. [Google Scholar]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Modal Invariant Submatrix | Dimension | Mechanical Meaning |
|---|---|---|
| Total mass | ||
| Initial centroid position in the FFR | ||
| Deformation introduced change in modal centroid position | ||
| Deformation introduced change in the moment of inertia | ||
| Initial moment of inertia | ||
| Deformation introduced change in the modal moment of inertia (the first-order main term) |
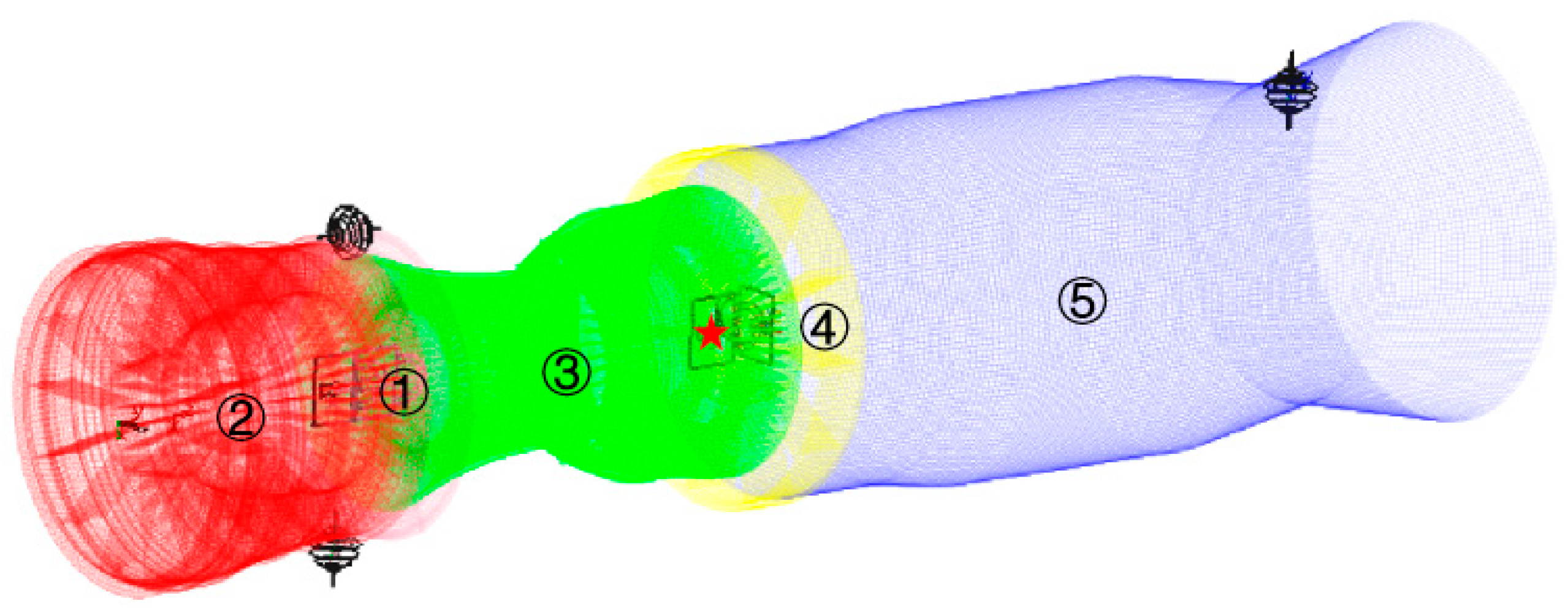
| Part Number (in Order of Assembly) | Part Name | Total Number of the CB Modes | Connections with Other Components |
|---|---|---|---|
| ① | Connector | 50 | (Ball hinge to ground) × 2 |
| ② | Compressor | 32 | Fixed to ① |
| ③ | Combustion chamber | 26 | Fixed to ② |
| ④ | Turbine | 32 | Fixed to ③ |
| ⑤ | Nozzle | 26 | Ball hinge to ground |
| Method for Solving Equation (45) | Total CPU Time Consumption | Computational Efficiency Improvement by Parallelization 2 (%) | Total Number of Solving System Equation (45) | |
|---|---|---|---|---|
| Serial (ms) | Parallel with 4 Cores (ms) | |||
| Traditional Pivoting GE | 666 | 897 | −34.7% | 2733 |
| Block GE (presented) | 632 | 405 | 35.9% | 2733 |
| Computational efficiency improvement by block GE 1 (%) | 5.1% | 54.8% | 39.2% | - |
| Part Number (in Order of Assembly) | Part Name | Total Number of the CB Modes | Connections with Other Components |
|---|---|---|---|
| ① | Crank | 50 | Rotation to ground |
| ② | Linker | 50 | Spin to ①, Spin to ③ |
| ③ | Slider | 0 | Translation to ground |
| FEM Model Item | Value | Note |
|---|---|---|
| Material | Aluminum | |
| Density | 2700 kg/m3 | 2.7 × 10−6 tonne/mm3. |
| Young’s modulus | 70 GPa | 7 × 104 MPa |
| Poisson’s ratio | 0.3 | |
| Finite element size | 1 mm × 1 mm × 1 mm | For both the crank and linker |
| Finite element type | C3D8R | Three-dimensional 8 nodes hexahedral element with reduced integration |
| Method for Solving Equation (45) | Total CPU Time Consumption (ms) | Total Number of Solving System Equation (45) |
|---|---|---|
| Serial pivoting GE | 4089 | 30,214 |
| Parallel block GE (presented, with 4 cores OpenMP) | 4013 | 31,546 |
| Computational efficiency improvement by block GE (%) 1 | 1.9% | - |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yang, C.; Xia, B.; Wan, Y.; Yang, P.; Xie, Y.; Xie, Z. Parallel Direct Solution of Flexible Multibody Systems Based on Block Gaussian Elimination. Appl. Sci. 2025, 15, 4541. https://doi.org/10.3390/app15084541
Yang C, Xia B, Wan Y, Yang P, Xie Y, Xie Z. Parallel Direct Solution of Flexible Multibody Systems Based on Block Gaussian Elimination. Applied Sciences. 2025; 15(8):4541. https://doi.org/10.3390/app15084541
Chicago/Turabian StyleYang, Cheng, Bin Xia, Yuexin Wan, Pin Yang, Yifan Xie, and Zhifeng Xie. 2025. "Parallel Direct Solution of Flexible Multibody Systems Based on Block Gaussian Elimination" Applied Sciences 15, no. 8: 4541. https://doi.org/10.3390/app15084541
APA StyleYang, C., Xia, B., Wan, Y., Yang, P., Xie, Y., & Xie, Z. (2025). Parallel Direct Solution of Flexible Multibody Systems Based on Block Gaussian Elimination. Applied Sciences, 15(8), 4541. https://doi.org/10.3390/app15084541