

Fluidity in the Phased Framework of Technology Acceptance: A Case Study to Understand (Older Adult) Participant Journeys Through Acceptance Phases with Mobile Telepresence Robots

 ,
,
Abstract
1. Introduction
1.1. Loneliness and Older Adults
1.2. Mobile Telepresence Robots
1.3. Factors Affecting Technology Acceptance
1.4. Acceptance Phases for Long-Term Technology Acceptance
1.4.1. Expectation Phase
1.4.2. Encounter Phase
1.4.3. Adoption Phase
1.4.4. Adaptation Phase
1.4.5. Integration Phase
1.4.6. Identification Phase
1.4.7. Non Use Phase
1.5. Current Study
- What backgrounds and characteristics help or hinder people moving longitudinally through acceptance phases?
- Can we identify personas to help future scholars assist people moving through acceptance phases?
- How can scholars identify which acceptance phase is occurring?
2. Method
2.1. Participants
2.2. Mobile Telepresence Robot (Double)
2.3. Procedure
2.3.1. House Tours
2.3.2. Bringing Robot
2.3.3. Main Sessions
2.3.4. Final Session
2.4. Measures
Interviews
- Use—“How often do you use the robot on average per day/week?” “What activities did you use the robot for?”
- Advantages and disadvantages of the robot—“What are some benefits/disadvantages to this robot?” “How can the robot be improved?”
3. Results
3.1. Definitions
3.2. Participants Experience
3.3. Sasha
3.3.1. House Tour Interview: Expectation1
3.3.2. Bringing Robot Interview: Adoption3
3.3.3. Month 1 Interview: Adaptation4
3.3.4. Month 3 Interview: Identification6
3.3.5. Month 6 Interview: Integration5
3.3.6. Final Notes
3.4. Kelly
3.4.1. House Tour Interview: Expectation1
3.4.2. Bringing Robot Interview: Adoption3
3.4.3. Month 1 Interview: Adaptation4
3.4.4. Month 3 Interview: Non Use⌀ (Hill)
3.4.5. Month 4 Interview: Identification6
3.4.6. Month 5 Interview: Integration5
3.4.7. Final Notes
3.5. David
3.5.1. House Tour Interview: Expectation1 and Adoption3
3.5.2. Month 1 Interview: Non Use⌀ (Hill)
3.5.3. Month 2 Interview: Adaptation4
3.5.4. Month 3 Interview: Identification6
3.5.5. Month 5 Interview: Integration5
3.5.6. Final Notes
3.6. Jessica
3.6.1. House Tour Interview: Expectation1 and Adoption3
3.6.2. Month 1 Interview: Adaptation4
3.6.3. Month 3: Non Use⌀
3.6.4. Month 5 Interview: Identification6
3.6.5. Month 6 Interview: Integration5
3.6.6. Final Notes
4. Discussion
4.1. RQ1: Progression Through Acceptance Phases
4.1.1. Solving Problems with Technology
4.1.2. Life Situations
4.1.3. Personality/Mindset
4.2. RQ2: Participant Emergent Personas
4.2.1. Sally the Standard
- Attitude: I am open to new technologies. I may be a bit worried about it, but I understand and accept that I will make some mistakes and the technology will have some errors, especially when I first start setting it up.
- Technology experience: Moderate: I am familiar with some basic and advanced technologies, like social media and Google Assistant. My familiarity with other devices can help me learn new technologies.
- Support from others: My family members or close friends help me learn new technologies—Especially when I am first starting or when new features are released.
- Life situations: I like to keep a busy social calendar. Sometimes it’s a little overwhelming.
- Personality: I am agreeable and open to new experiences like learning to use new technology. I am willing to look past some technical errors. I am not too adventurous and tend to stick with the typical or recommended uses of technology rather than come up with new uses for it.
- Emotional connection: I really appreciate the technology that helps me. After becoming familiar with it, I may find myself emotionally connected to it—especially if it is very useful or connects me to people I love.
- Progress through acceptance phases: I steadily move through the acceptance phases. Sometimes I stall when I get busy, but if I have set up use routines, they will draw me back to using it and help me achieve final acceptance.
4.2.2. Addie the Advanced User
- Attitude: I am very excited about new technologies and love being the first person to try them out. I want to discover all the possible use cases, and I make a game of finding new uses and limitations of the technology.
- Technology experience: High; I have been an early adopter or early developer of some technologies. I am confident doing my own research and even reaching out to the company when I need support to succeed at using it.
- Support from others: I don’t need anyone to learn it with me, but I enjoy it if they do. I like to learn many different ways to use technology so I can teach others and get them hooked on it….
- Life situations: I have a routine of things I like to do. I enjoy incorporating new ideas and technologies into my routines.
- Personality: I am open to experiences and perhaps extroverted. I look forward to overcoming challenges and difficulties. I enjoy building puzzles to help myself and other people become more familiar with the technology.
- Emotional connection: I see no reason to get emotionally connected to technology; it’s a lot of fun, but at the end of the day, it’s just a tool.
- Progress through acceptance phases: I speed ahead into late acceptance phases. When I start thinking of technology, I consider how to adapt to its possible strengths and drawbacks. Technical issues can still slow my use of the technology, but once I overcome them, I am quick to recover my progress and incorporate the technology into my routines.
4.2.3. Nora the Non-Starter
- Attitude: I wait until everyone else in my neighborhood gets the technology before I bother. I give technology exactly one chance to work. If it doesn’t, then I want to throw it out.
- Technology experience: Limited; I only use the basics like phone calls, emails, texting, Twitter (X), and Facebook messaging. I can be convinced to use technology if it has a functional use that I need, like with my Bluetooth hearing aid and off-brand robot vacuum cleaner.
- Support from others: I do not have people in my life to help me use new technology. This means that if I can’t figure out how to use it on my own right away, I probably won’t use it at all.
- Life situations: It takes other people to keep me going with using technologies in routines, especially if the routines require energy from me. If I don’t have this support, anything new will fade away.
- Personality: I am steadfast. Once I make up my mind about technology, the technology, and other people cannot change my mind. If other people think the technology is easy to use, but I can’t make it work, it is probably the fault of the technology, and not worth my effort trying to make it work.
- Emotional connection: I feel no emotional connection to most technologies. Some new technologies only take up space.
- Progress through acceptance phases: I have high expectations of technology, and if it does not work the way I think it should, I will only find disadvantages in it and discard it quickly, skipping to a Non Use phase without fully experiencing the technology. It is possible for me to form routines with the technology, but only if somebody else creates these routines and makes the technology automatically work for me.
4.3. RQ3: How to Identify Which Phases Are Occurring and Suggested Changes to Longitudinal Technology Acceptance Framework
5. Limitations and Future Directions
6. Summary and Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| IP | Interaction Partner |
| PFTA | Phase Framework of Technology Acceptance |
Appendix A. Participants and Interaction Partners

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| P # | Pseudonyms | Sex | Age | Marital Status | Life Situations | Individuals Living in Home | Completed Study |
|---|---|---|---|---|---|---|---|
| 1 | Sasha | F | 63 | Married | Working | 3 | Y |
| 2 | Kelly | F | 70 | Married | Retired | 2 | Y |
| 5 | David | M | 84 | Widower | Retired | 1 | Y |
| 7 | Jessica | F | 75 | Married | Retired | 3 | Y |
| P # | Pseudonyms | Sex | Age | Marital Status | Life Situations | Individuals Living in Home | Completed Study |
|---|---|---|---|---|---|---|---|
| 1 | Chasity | F | 39 | Married | Stay at home mother | 4 | Y |
| 2 | Selena | F | 53 | Married | Working | 1 | Y |
| 5 | Patricia | F | 74 | Single | Retired | 1 | Y |
| 5 | Michelle | F | 61 | Married | Medical disability | 2 | Y |
| 7 | Victoria | F | 74 | Divorced | Retired | 3 | Y |
Appendix B. Questions Asked During Interviews
Appendix B.1. House Tour
Appendix B.1.1. House Tour—Technology Use
- I want you to think about the current technology you primarily use to communicate with a person or group of people. What is it?
- Tell us why you like it?
- What’s good about it?
- What is missing in comparison to an in-person visit?
Appendix B.1.2. House Tour—Social Life
- How would you describe your social life?
- Do you have many or few friends?
- How many of these are close friendships?
- What about family members?
- What is your marital status?
- Would you change anything about your social life?
- Why?
- How important are friends and family to you for your life satisfaction?
- How has this changed during your life?
- How do you keep in contact/interact with them?
- How do you usually contact people who live far away?
- Do you think the robot could be a compliment to your social life?
- Why?
- How?
- What kinds of interactions could you see yourself having with the robot?
Appendix B.1.3. House Tour—General Perceptions of Robots
- How would you describe a robot?
- What experiences have you had with robots?
- How have those movies/books affected your perceptions of robots?
Appendix B.1.4. House Tour
- Can you show me where you would like to keep the robot?
- Have you thought about where in your house you would like the robot to move around or where you plan on using it most?
- Do you have any pets?
- If so, how will you ensure the robot will be secured away from pet access and avoid damages?
- Do you smoke in your home?
Appendix B.2. Bringing the Robot to the Participants Home
Bringing Robot
- How does this first experience with the Mobile Telepresence Robot differ from the expectations you had of the robot?
- If you had to describe the robot to someone who has never seen or used it, how would you do so?
- What do you think of this robot?
- What are the possible benefits of this robot?
- What are the possible disadvantages of this robot?
- What are your expectations now for using this robot?
- How could this robot help you?
- Would you definitely like to have this robot in your home?
- Why?
- Why not?
- How could you/would you like to use the robot over the next few weeks?
- Do you feel like you know how you would do that?
- Or how often you would do it?
Appendix B.3. Monthly Interview
Appendix B.3.1. Monthly Interviews—Post Activity Interview
- Have you used the robot in the last few weeks?
- How often do you use the robot on average per day/week?
- What did you use the robot for? What activities?
- Who did you use the robot with?
- Do you use the robot differently with different people?
- If yes, how so?
- At what times do you usually use the robot?
- Why have you not used the robot in the last period?
- Would you want to keep using the robot if not for the study?
- What do you expect in the coming period of using the robot?
- Why do you not want to use the robot in the future?
- When was the last time you used this robot?
- What were the reasons why you stopped using the robot?
- Do you plan to use the robot again in the coming period?
- When do you plan to use the robot again?
- What do you intend to use the robot for again?
- What do you expect from using the robot again?
- Is there anything that could change your mind about it?
Appendix B.3.2. Monthly Interviews—Domestication
- Do you like using this robot (besides the monthly interviews)?
- Could you explain what you do enjoy?
- Could you explain what you do not enjoy?
- Can you elaborate on any frustrations while using the robot?
- Have you discovered any new uses for the robot?
Appendix B.3.3. Monthly Interviews—Impression of the Robot
- What do you think of this mobile telepresence robot?
- What are the benefits of the robot?
- What are the disadvantages of the robot?
- Have your expectations of the robot been met?
- How can the robot be improved?
- Have you talked to others about this robot?
- What did you tell them/what did you talk about?
Appendix B.3.4. Monthly Interviews—Use of the Robot
- What has been the most memorable event/experience you have had with the robot in the recent period?
- What has been the most positive experience of your use over the past period?
- What has been the most negative experience of your use over the past period?
- Have you experienced any practical or technical problems?
- Has using this robot helped you learn or operate other technology within your home?
Appendix B.4. Final Interviews Participant
Appendix B.4.1. Final Interview Participant—Intention for Joining the Study
- Can you tell me what made you want to join this study?
- What did you hope to get out of it?
- What did you think it would be like to participate in this study?
- What did you expect in the beginning?
- What did you think it would be like to have this robot in your home?
Appendix B.4.2. Final Interview Participant—Intended Usage vs. Actual Usage—Interaction with Remote Person
- Who did you initially intend to use the robot with?
- Was this the case throughout or did it change?
- How did it change? Relates to next question about others.
- Did anybody else in your home (including visitors) use the robot?
- With whom did you mostly use the robot?
- Do you use the robot differently with different people?
- How so?
- How often did you use the robot on average per day/week/month?
- At what times did you usually use the robot (morning, afternoon, night, weekend, weeknight)?
- What did you commonly use the robot for (e.g., talking/or varies shared activities)?
- Do you think you are still getting the benefits of feeling more present in telepresence than just using videoconferencing if you’re not moving the robot?
- What is your comfort level of using the robot alone?
- VS What is your comfort level when the RA is there?
- How has that experience changed?
Appendix B.4.3. Final Interview Participant—Recalling the Extremes
- First, what has been the most positive experience you’ve had?
- When did that happen (month, day of week, time of day)?
- Where were you in your home?
- Who was using the robot (if unclear)?
- What were you doing?
- What made this interaction so positive?
- Next, what would you say has been the most unexpected/creative experience you’d had?
- When did that happen (month, day of week, time of day)?
- Where were you in your home?
- Who was using the robot (if unclear)?
- What were you doing?
- What made this interaction so unexpected/creative?
- Now on the other end of the spectrum, what has been the most negative experience you’d had?
- When did that happen (month, day of week, time of day)?
- Where were you in your home?
- Who was using the robot (if unclear)?
- What were you doing?
- What made this interaction so negative?
- What did you expect to happen or how would you want this situation to have changed?
Appendix B.4.4. Final Interview Participant—Before and After
- How did you feel about the robot the first couple months you had it in your home?
- How does it compare to the last couple of months?
- Did the way you used it change over time?
- How so?
- Why?
- When?
- Did your comfort with using the robot change over time?
- How so?
- Can you give an example?
- Did your frequency of using the robot change over time?
- If YES—Did the frequency increase or decrease?
- How has your use of this robot helped you in understanding other technology within your home (if it has)?
Appendix B.4.5. Final Interview Participant—Feedback to the Company
- 1.
- On a scale of 1 star to 10 stars, how many stars would you give this robot product overall?
- 2.
- Why?
- 3.
- What was your first biggest frustration/disadvantage?
- 4.
- How frequently did frustration #1 occur?
- 5.
- When was the last time (most recently) this happened?
- 6.
- On a scale of 1 to 5 (1 = not really frustrating, 5 = extremely frustrating), what level of frustration did you feel?
- 7.
- How did you handle frustration #1?;
- 8.
- What was your second biggest frustration/disadvantage?
- 9.
- How frequently did frustration #2 occur?
- 10.
- When was the last time (most recently) this happened?
- 11.
- On a scale of 1 to 5 (1 = not really frustrating, 5 = extremely frustrating), what level of frustration did you feel?
- 12.
- How did you handle frustration #2?;
- 13.
- What was your third biggest frustration/disadvantage?
- 14.
- How frequently did frustration #3 occur?
- 15.
- When was the last time (most recently) this happened?
- 16.
- On a scale of 1 to 5 (1 = not really frustrating, 5 = extremely frustrating), what level of frustration did you feel?
- 17.
- How did you handle frustration #3?
- 18.
- How did your frustrations change from the beginning to the end of the study?
- 19.
- What was one thing that the company did well/benefits you experienced with the design of this robot (“Its Appearance?” “Its Use?” “It’s Applications?”) (Audio, Video quality, Controls, Driving, App, Login process, internet)?
- 20.
- What was a second thing that the company did well/benefits you experienced with the design of this robot (“Its Appearance?” “Its Use?” “It’s Applications?”) (Audio, Video quality, Controls, Driving, App, Login process, internet)?
- 21.
- What was a third thing that the company did well/benefits you experienced with the design of this robot (“Its Appearance?” “Its Use?” “It’s Applications?”) (Audio, Video quality, Controls, Driving, App, Login process, internet)?
Appendix B.4.6. Final Interview Participant—Emotional Bond
- Did you give the robot a name?
- If so, what did you call the robot?
- Who named the robot?
- Is there any significance to this name?
- Do you feel an emotional connection with the robot?
Appendix B.4.7. Final Interview Participant—Emotional Bond—If Yes
- What is that like for you?
- How did you respond to it (e.g., Were you shocked by it? Were you intrigued? Did you question it?)?
- How did that emotional connection develop or change over time?
- Did this bond have any special meaning to you?
- What was that meaning?
- Did you expect to have an emotional bond with a robot?
- What helped you form this connection?
- What happened from the connection (e.g., did this connection help you in your use or understanding of the robot?)?
- How do you feel now that you will no longer use this robot?
Appendix B.4.8. Final Interview Participant—Emotional Bond—If No
- Do you feel that an emotional connection could ever be formed?
- Would you want an emotional connection to form?
- Do you think that you could have formed this connection if given more time?
- Why?
- Why not?
- What do you think barred you from forming a connection?
Appendix B.4.9. Final Interview Participant—Emotional Bond with Others
- How did your emotional connection change with those who you used the robot with?
- Was this different from how it might be strengthened when you interact in other ways (e.g., over the phone, in person)?
Appendix B.4.10. Final Interview Participant—Completion of the Study
- How did participating in the study meet your expectations?
- Did you get what you hoped to get out of the study when you initially started? Please elaborate.
- Would you do this study again knowing what you know now?
- Did having this robot in your home go as you imagined it to?
- Would you want to use another robot like this in the future?
- If Yes—Would you continue having this robot in your home given the opportunity outside of the study?
- If No—Why do you not want to use the robot (in the future)?
Appendix B.5. Final Interviews Interaction Partner
Appendix B.5.1. Final Interviews Interaction Partner—Intention for Joining the Study
- Can you tell me what made you want to join this study?
- What did you hope to get out of it?
- What did you think it would be like to participate in this study? What did you expect in the beginning?
- What did you think it would be like to communicate through this robot?
- Do you think you are still getting the benefits of feeling more present in telepresence than just using videoconferencing if you’re not moving the robot?
Appendix B.5.2. Final Interviews Interaction Partner—Recalling the Extremes
- First, what has been the most positive experience you’ve had?
- When did that happen (month, day of week, time of day)?
- Where in the house was the robot?
- What were you doing?
- What made this interaction so positive?
- Next, what would you say has been the most unexpected/creative experience you’d had?
- When did that happen (month, day of week, time of day)?
- Where in the house was the robot?
- What were you doing?
- What made this interaction so unexpected/creative?
- Now on the other end of the spectrum, what has been the most negative experience you’d had?
- When did that happen (month, day of week, time of day)?
- Where in the house was the robot?
- What were you doing?
- What made this interaction so negative?
- What did you expect to happen or how would you want this situation to have changed?
- How has your use of this robot helped you in understanding other technology within your home (if it has)?
Appendix B.5.3. Final Interviews Interaction Partner—Before and After
- How did you feel about the robot the first couple months you were joining through it?
- How does it compare to the last couple of months?
- How did your involvement in the activity change over time?
- Did you feel more/less engaged?
- Did the way you used it change over time?
- How so?
- Why?
- When?
- Did your comfort with using the robot change over time?
- How so?
- Can you give an example?
Appendix B.5.4. Final Interviews Interaction Partner—Driving the Robot
- Could you explain your experience in driving the robot?
- How intuitive or challenging was steering?
- When did it change?
- Why/How did it change?
- How intuitive or challenging was it to get logged into the robot?
- When did this change?
- How and why did this change?
- Did you have any other challenges with the robot?
- What were they?
- How did they change over time?
- Was the mobility aspect of this robot useful to you (as compared to using a stationary device like a phone/video call)?
- Have you visited the primary participants’ homes in person prior to this study?
- What is your comfort level of using the robot alone?
- VS What is your comfort level when the RA is there?
- How has that experience changed?
- Did you feel the freedom to explore with the robot?
Appendix B.5.5. Final Interviews Interaction Partner—Feedback to the Company
- On a scale of 1 star to 10 stars, how many stars would you give this robot product overall?
- Why?
- What was your first biggest frustration/disadvantage?
- How frequently did frustration #1 occur?
- When was the last time (most recently) this happened?
- On a scale of 1 to 5 (1 = not really frustrating, 5 = extremely frustrating), what level of frustration did you feel?
- How did you handle frustration #1?
- What was your second biggest frustration/disadvantage?
- How frequently did frustration #2 occur?
- When was the last time (most recently) this happened?
- On a scale of 1 to 5 (1 = not really frustrating, 5 = extremely frustrating), what level of frustration did you feel?
- How did you handle frustration #2?;
- What was your third biggest frustration/disadvantage?
- How frequently did frustration #3 occur?
- When was the last time (most recently) this happened?
- On a scale of 1 to 5 (1 = not really frustrating, 5 = extremely frustrating), what level of frustration did you feel?
- How did you handle frustration #3?
- How did your frustrations change from the beginning to the end of the study?
- What was one thing that the company did well/benefits you experienced with the design of this robot (“Its Appearance?” “Its Use?” “It’s Applications?”) (Audio, Video quality, Controls, Driving, App, Login process, internet)?
- What was the second thing that the company did well/benefits you experienced with the design of this robot (“Its Appearance?” “Its Use?” “It’s Applications?”) (Audio, Video quality, Controls, Driving, App, Login process, internet)?
- What was the third thing that the company did well/benefits you experienced with the design of this robot (“Its Appearance?” “Its Use?” “It’s Applications?”) (Audio, Video quality, Controls, Driving, App, Login process, internet)?
Appendix B.5.6. Final Interviews Interaction Partner—Emotional Bond
- Did you give the robot a name?
- What did you call the robot?
- Who named the robot?
- Is there any significance to this name?
- Did you form a bond with the robot even though it wasn’t in your home?
Appendix B.5.7. Final Interviews Interaction Partner—Emotional Bond—If Yes
- What was that like?
- How did you respond to it (e.g., Were you shocked by it? Were you intrigued? Did you question it?)?
- How did this develop over time?
- Have you considered what this means to you?
- What was that meaning?
- How do you feel now that you will no longer use this robot?
Appendix B.5.8. Final Interviews Interaction Partner—Emotional Bond—If No
- Would you want an emotional connection to form?
- Do you feel that an emotional connection could ever be formed?
- Why?
- Why not?
- Do you think that you could have formed this connection if given more time?
- What do you think barred you from forming a connection?
Appendix B.5.9. Final Interviews Interaction Partner—Emotional Bond with Others
- How did your emotional connection change with those who you used the robot with?
- Was this different from how it might be strengthened when you interact in other ways (e.g., over the phone, in person)?
Appendix B.5.10. Final Interviews Interaction Partner—Completion of the Study
- How did participating in the study meet your expectations?
- Did you get what you hoped to get out of the study when you initially started? Please elaborate.
- Would you do this study again knowing what you know now?
- Would you want to use another robot like this in the future?
- If Yes—Would you continue using this robot given the opportunity outside of the study?
- If No—Why do you not want to use the robot (in the future)?
- If given the opportunity, knowing what you know from your position as the secondary participant, would you like to have this type of robot in your home in the future?
Appendix C. Coding Scheme
| Experience | Description | Example |
|---|---|---|
| 3. Adjustment | User is adapting to the robot and how to use it. | “Actually, VictoriaSP and I are having fun getting to know each other better.” |
| 1. Anticipation | User expresses expectations about the robot or its use (anticipates benefits or disadvantages that they have not yet experienced). | “I thought I would have some control over it. I thought it would be my robot, and that is not mine. Actually, VictoriaSP has more control over it than I do, which is a little strange.” |
| 1. Association | User compares the robot or its use with something else. | “I enjoy talking with ChasitySP, it’s like we are in person.” |
| 1. Attitude Formation | User forms an opinion about the robot or its use. Occurs anytime a new attitude is formed or changed. | “No, no, I cannot use it. There is a design issue [with the robot].” |
| 6. Confirmation | User seeks confirmations for or validates their opinion about the robot or its use. (like confirmation bias). Shows no sign of change of opinion since previous interview. | “You know, it’s different. You feel like you’re dabbling in tech. It is a nice way to interact with someone as you can see.” |
| 3. Curiosity | User is curious about what the robot has to offer. | “Actively looking for new ways to use the robot.” |
| 1. Discuss with Others | Users have shared their experiences with the robot with others. | “I talked with my whole family at a family reunion.” |
| 6. Emotional Attachment | User is emotionally attached to the robot. | I do miss him [the robot].” |
| 3. Excitement | User is excited/enthusiastic about the robot. | “I really enjoy working with the robot.” |
| 4. Exploration | User is exploring how the robot works, trying things for the first time. Differs from familiarization as the user is attempting to explore the technology’s possible uses and understand operation. | “I’ve been enjoying trying the different controls and there are certain ways you can free up the target so that it [robot] floats around and the robot sort of has a continuous tour. I haven’t quite figured out perfectly how to do it.” |
| 5. Familiarization | User is getting familiar and more comfortable with how the robot works and used to what the robot has to offer as well as the limitations. | “I have become more comfortable with it.” |
| 6. Identification | User identifies them self with the robot or its use. | “I think the whole purpose of the program is that thing that was started years ago and where they were trying to figure out. What to do about it. People who were elderly and didn’t have any local connections.” |
| 5. Incorporation | User has incorporated (the use of) the robot into his/her existing daily activities / routines; there is no new routine established because of the technology. | “About 2 times a week for chit chatting and visiting with friends.” |
| 1. Information Seeking | User is seeking information about the robot or its use. | “If they came up with a model or version where they can handle different surfaces. I know why they did this, it has a narrow profile, and it can get in between chairs and tables and such. It’s narrow. They just have to figure out the market for it.” |
| ⌀. Lack of Use | User is not using the robot to its full mobility and communication capabilities. Occurs before Non Acceptance. | “Because I have no access to it. And if you give me something to do with it. I might do it, but other than that, it’s just taking up my space.” |
| 6. Maintenance | User is maintaining the way they are using the robot. Consistency in types of activities and the way they use the technology. | “Well, not daily but I’d say a couple of times.” |
| ⌀. Non Acceptance | User contemplated accepting the robot, but after a period of use decided to abandon it. Becomes nonacceptance after 2 consecutive interviews or lack of use. | “None [use of the robot in the last period], just connecting it to its charger.” |
| 6. Novelty | User perceives the robot as something new. | “Yes. Oh, I like that it’s mobile, whereas with zoom you know you have to sit there, I have to sit here when I go over there I’m out of the picture you probably can’t hear me if I’m way over their fault with the road like you can follow me around or I could follow you around.” |
| 6. Personality Attribution | User is ascribing the robot with human-like characteristics, such as personality, emotions, intentions, and needs. | “It’s [robot] going to spoil me … it’s a nice luxury.” |
| 4. Personalization | User is customizing the robot and its settings to his/her personal needs. | “Well yeah you know I’ve been enjoying trying the different controls and you know there are certain ways you can free up the target so that it kind of floats around and the robot sort of has a continuous tour you know. I haven’t quite figured out perfectly how to do it perfectly. It seems like you set the target and it looks like it’s a little elevated over the floor, and then when it’s in that configuration, the target and the robot get it to move around together. You know, it makes it a truly autonomous prize.” |
| 1. Preparation | User is preparing him-/herself for the robot that is about to be delivered. | “It needs to be near the outlet. The hallway would be better than the kitchen.” |
| 6. Promotion to Others | User is recommending the robot to other people. Different from simply discussing it with others. | “Well, this niece I have in the east coast she’s a real organizer involved in a lot of British intake, and we’ve talked about her looking into you know she lives in North Carolina and of course it’s a very backwoods state with many respects but they do have the university technology loop and stuff in North Carolina.” |
| 6. Recognize Benefits | User acknowledges the benefits the robot has to offer. | “The screen is big enough, you know, to have good sized screens.” |
| 6. Recognize Disadvantages | User acknowledges the disadvantages the robot has to offer. | “Sort of make it easier for, like older people to use it, you know, more accessible.” |
| 5. Reinvention | User is inventing new applications / utilization’s for the robot. | “Oh, playing the board game. Figuring out all the stuff I could do or, you know, figuring out how to do this, connect to the TV or use the webcam.” |
| ⌀. Suspension of Use | User fully deserts any use of the robot after fully experiencing it. | - |
| 4. Trial and Error | User is trying how the robot works and encounters some frustrations. | “There’s kind of a limit to what you can do if you can’t go for a walk. Like if you go for a walk, you could walk around the neighborhood and then try to run back and check your room because it’s much easier.” |
| 5. Use Routines | User has acquired a routine of using the robot. Occurs when users create a new routine because of the new technology (i.e., calling X because of the robot). | “Chit chatting and visiting with friends.” |
Appendix D. Participant Coding Tables
| Experience | HT | BR | M1 | M2 | M3 | M4 | M5 | M6 | M7 |
|---|---|---|---|---|---|---|---|---|---|
| Phase 1: Expectation Phase | |||||||||
| Anticipation | 1 | 4 | 1 | 0 | 0 | 0 | 0 | 0 | 0 |
| Association | 1 | 0 | 2 | 3 | 0 | 1 | 1 | 0 | 0 |
| Attitude Formation | 1 | 4 | 1 | 0 | 0 | 0 | 0 | 0 | 0 |
| Discuss with Others | 0 | 0 | 2 | 2 | 1 | 1 | 0 | 1 | 2 |
| Information Seeking | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
| Preparation | 2 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
| Totals | 6 | 6 | 6 | 5 | 1 | 2 | 1 | 1 | 2 |
| Phase 2: Encounter Phase | |||||||||
| Phase 3: Adoption Phase | |||||||||
| Adjustment | 0 | 1 | 2 | 1 | 0 | 0 | 0 | 0 | 0 |
| Curiosity | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
| Excitement | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 1 |
| Totals | 0 | 2 | 2 | 1 | 0 | 0 | 0 | 0 | 1 |
| Phase 4: Adaptation Phase | |||||||||
| Exploration | 0 | 0 | 0 | 2 | 1 | 0 | 1 | 0 | 0 |
| Novelty | 1 | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 0 |
| Trial and Error | 0 | 0 | 3 | 1 | 1 | 2 | 0 | 0 | 1 |
| Personalization | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1 |
| Totals | 1 | 0 | 4 | 3 | 2 | 2 | 1 | 0 | 2 |
| Phase 5: Integration Phase | |||||||||
| Incorporation | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
| Reinvention | 0 | 0 | 0 | 1 | 1 | 2 | 2 | 3 | 0 |
| Use Routines | 0 | 0 | 0 | 0 | 1 | 3 | 3 | 5 | 4 |
| Familiarization | 0 | 0 | 1 | 1 | 1 | 1 | 0 | 0 | 0 |
| Totals | 0 | 0 | 1 | 2 | 3 | 6 | 5 | 8 | 4 |
| Phase 6: Identification Phase | |||||||||
| Promotion to Others | 0 | 0 | 0 | 1 | 3 | 1 | 0 | 1 | 0 |
| Confirmation | 0 | 0 | 0 | 1 | 3 | 2 | 3 | 4 | 4 |
| Emotional Attachment | 0 | 0 | 2 | 0 | 0 | 0 | 0 | 0 | 0 |
| Identification | 0 | 0 | 0 | 0 | 1 | 3 | 1 | 0 | 2 |
| Maintenance | 0 | 1 | 0 | 2 | 1 | 0 | 0 | 0 | 0 |
| Personality Attribution | 0 | 0 | 1 | 2 | 0 | 1 | 1 | 1 | 0 |
| Recognize Benefits | 0 | 1 | 2 | 2 | 1 | 0 | 1 | 2 | 0 |
| Recognize Disadvantages | 0 | 1 | 1 | 0 | 2 | 2 | 1 | 0 | 3 |
| Totals | 0 | 3 | 6 | 8 | 11 | 9 | 7 | 8 | 9 |
| Phase ⌀: Non Use Phase | |||||||||
| Lack of Use | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
| Non Acceptance | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
| Suspension of Use | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
| Totals | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
| Experience | HT | BR | M1 | M3 | M4 | M5 | M6 | M7 |
|---|---|---|---|---|---|---|---|---|
| Phase 1: Expectation Phase | ||||||||
| Anticipation | 2 | 1 | 0 | 0 | 0 | 0 | 0 | 0 |
| Association | 2 | 1 | 0 | 0 | 0 | 0 | 1 | 0 |
| Attitude Formation | 1 | 1 | 2 | 0 | 1 | 0 | 0 | 0 |
| Discuss with Others | 0 | 0 | 2 | 3 | 1 | 1 | 0 | 2 |
| Information Seeking | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
| Preparation | 2 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
| Totals | 7 | 3 | 4 | 3 | 2 | 1 | 1 | 2 |
| Phase 3: Adoption Phase | ||||||||
| Adjustment | 0 | 0 | 2 | 1 | 0 | 0 | 0 | 0 |
| Curiosity | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
| Excitement | 1 | 3 | 0 | 0 | 0 | 0 | 0 | 0 |
| Totals | 1 | 3 | 2 | 1 | 0 | 0 | 0 | 0 |
| Phase 4: Adaptation Phase | ||||||||
| Exploration | 0 | 0 | 3 | 1 | 0 | 1 | 2 | 0 |
| Novelty | 0 | 0 | 1 | 0 | 0 | 0 | 0 | 0 |
| Trial and Error | 0 | 0 | 0 | 1 | 0 | 0 | 0 | 1 |
| Personalization | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
| Totals | 0 | 0 | 4 | 2 | 0 | 1 | 2 | 1 |
| Phase 5: Integration Phase | ||||||||
| Incorporation | 0 | 0 | 0 | 0 | 2 | 0 | 1 | 0 |
| Reinvention | 0 | 0 | 1 | 4 | 0 | 2 | 1 | 1 |
| Use Routines | 0 | 0 | 0 | 1 | 1 | 3 | 5 | 4 |
| Familiarization | 0 | 0 | 4 | 1 | 0 | 0 | 0 | 0 |
| Totals | 0 | 0 | 5 | 6 | 3 | 5 | 7 | 5 |
| Phase 6: Identification Phase | ||||||||
| Promotion to Others | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
| Confirmation | 0 | 0 | 0 | 3 | 1 | 3 | 3 | 2 |
| Emotional Attachment | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
| Identification | 0 | 0 | 0 | 0 | 2 | 0 | 0 | 0 |
| Maintenance | 0 | 0 | 2 | 0 | 0 | 1 | 0 | 0 |
| Personality Attribution | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1 |
| Recognize Benefits | 0 | 2 | 2 | 0 | 3 | 2 | 2 | 2 |
| Recognize Disadvantages | 0 | 2 | 2 | 4 | 1 | 0 | 5 | 4 |
| Totals | 0 | 4 | 6 | 7 | 7 | 6 | 10 | 9 |
| Phase ⌀: Non Use Phase | ||||||||
| Lack of Use | 0 | 0 | 0 | 1 | 0 | 0 | 0 | 0 |
| Non Acceptance | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
| Suspension of Use | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
| Totals | 0 | 0 | 0 | 1 | 0 | 0 | 0 | 0 |
| Experience | HT | BR | M1 | M2 | M3 | M4 | M5 | M6 | M7 |
|---|---|---|---|---|---|---|---|---|---|
| Phase 1: Expectation Phase | |||||||||
| Anticipation | 1 | 2 | 1 | 0 | 0 | 0 | 0 | 0 | 0 |
| Association | 2 | 2 | 1 | 1 | 0 | 1 | 0 | 1 | 0 |
| Attitude Formation | 0 | 1 | 2 | 1 | 0 | 0 | 0 | 0 | 0 |
| Discuss with Others | 0 | 0 | 0 | 0 | 0 | 0 | 2 | 1 | 3 |
| Information Seeking | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
| Preparation | 2 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
| Totals | 5 | 5 | 4 | 2 | 0 | 1 | 2 | 2 | 3 |
| Phase 3: Adoption Phase | |||||||||
| Adjustment | 0 | 0 | 3 | 0 | 0 | 0 | 0 | 0 | 0 |
| Curiosity | 2 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
| Excitement | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
| Totals | 2 | 0 | 3 | 0 | 0 | 0 | 0 | 0 | 0 |
| Phase 4: Adaptation Phase | |||||||||
| Exploration | 0 | 0 | 1 | 0 | 0 | 1 | 0 | 1 | 0 |
| Novelty | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
| Trial and Error | 0 | 0 | 0 | 2 | 0 | 0 | 0 | 0 | 0 |
| Personalization | 0 | 0 | 0 | 0 | 1 | 0 | 0 | 0 | 0 |
| Totals | 0 | 1 | 1 | 2 | 1 | 1 | 0 | 1 | 0 |
| Phase 5: Integration Phase | |||||||||
| Incorporation | 0 | 0 | 0 | 0 | 0 | 1 | 3 | 5 | 2 |
| Reinvention | 0 | 0 | 2 | 1 | 1 | 2 | 0 | 1 | 3 |
| Use Routines | 0 | 0 | 0 | 1 | 1 | 0 | 2 | 0 | 0 |
| Familiarization | 0 | 3 | 0 | 1 | 0 | 0 | 0 | 0 | 1 |
| Totals | 0 | 3 | 2 | 3 | 2 | 3 | 5 | 6 | 6 |
| Phase 6: Identification Phase | |||||||||
| Promotion to Other | 0 | 0 | 0 | 1 | 1 | 2 | 0 | 0 | 0 |
| Confirmation | 0 | 0 | 0 | 0 | 2 | 1 | 1 | 2 | 3 |
| Emotional Attachment | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
| Identification | 0 | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 0 |
| Maintenance | 0 | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 0 |
| Personality Attribution | 0 | 0 | 0 | 0 | 0 | 0 | 1 | 1 | 1 |
| Recognize Benefits | 0 | 1 | 1 | 0 | 2 | 5 | 1 | 2 | 0 |
| Recognize Disadvantages | 0 | 1 | 1 | 2 | 4 | 2 | 4 | 9 | 6 |
| Totals | 0 | 2 | 4 | 3 | 10 | 10 | 7 | 14 | 10 |
| Phase ⌀: Non Use Phase | |||||||||
| Lack of Use | 0 | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 0 |
| Non Acceptance | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
| Suspension of Use | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
| Totals | 0 | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 0 |
| Experience | HT | BR | M1 | M2 | M3 | M4 | M5 | M6 | M7 |
|---|---|---|---|---|---|---|---|---|---|
| Phase 1: Expectation Phase | |||||||||
| Anticipation | 1 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
| Association | 2 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
| Attitude Formation | 1 | 5 | 2 | 2 | 0 | 0 | 2 | 0 | 0 |
| Discuss with Others | 0 | 0 | 1 | 2 | 0 | 2 | 1 | 0 | 0 |
| Information Seeking | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
| Preparation | 2 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
| Totals | 6 | 7 | 3 | 4 | 0 | 2 | 3 | 0 | 0 |
| Phase 3: Adoption Phase | |||||||||
| Adjustment | 0 | 0 | 0 | 1 | 0 | 0 | 0 | 0 | 0 |
| Curiosity | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
| Excitement | 0 | 0 | 0 | 1 | 0 | 0 | 1 | 0 | 0 |
| Totals | 1 | 0 | 0 | 2 | 0 | 0 | 1 | 0 | 0 |
| Phase 4: Adaptation Phase | |||||||||
| Exploration | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
| Novelty | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
| Trial and Error | 0 | 0 | 1 | 1 | 0 | 0 | 0 | 0 | 0 |
| Personalization | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
| Totals | 0 | 0 | 1 | 1 | 0 | 0 | 0 | 0 | 0 |
| Phase 5: Integration Phase | |||||||||
| Incorporation | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
| Reinvention | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1 |
| Use Routines | 0 | 0 | 0 | 0 | 0 | 0 | 1 | 3 | 0 |
| Familiarization | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
| Totals | 0 | 0 | 0 | 0 | 0 | 0 | 1 | 3 | 1 |
| Phase 6: Identification Phase | |||||||||
| Promotion to Others | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
| Confirmation | 0 | 0 | 0 | 0 | 1 | 0 | 4 | 2 | 2 |
| Emotional Attachment | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
| Identification | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
| Maintenance | 0 | 0 | 0 | 1 | 0 | 0 | 0 | 0 | 1 |
| Personality Attribution | 0 | 0 | 0 | 0 | 0 | 0 | 1 | 0 | 1 |
| Recognize Benefits | 0 | 0 | 1 | 1 | 0 | 0 | 1 | 2 | 0 |
| Recognize Disadvantages | 0 | 2 | 3 | 3 | 0 | 0 | 5 | 2 | 0 |
| Totals | 0 | 2 | 4 | 5 | 1 | 0 | 11 | 6 | 4 |
| Phase ⌀: Non Use Phase | |||||||||
| Lack of Use | 0 | 0 | 1 | 4 | 5 | 0 | 0 | 0 | 0 |
| Non Acceptance | 0 | 0 | 0 | 1 | 0 | 4 | 4 | 12 | 6 |
| Suspension of Use | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
| Totals | 0 | 0 | 1 | 5 | 5 | 4 | 4 | 12 | 6 |
| Participant Experience | HT | BR | M1 | M2 | M3 | M4 | M5 | M6 | M7 |
|---|---|---|---|---|---|---|---|---|---|
| Phase 1: Expectation Phase | |||||||||
| Anticipation | 5 | 9 | 2 | 0 | 0 | 0 | 0 | 0 | 0 |
| Association | 0 | 0 | 2 | 1 | 0 | 1 | 0 | 2 | 0 |
| Attitude Formation | 0 | 0 | 8 | 6 | 0 | 2 | 3 | 0 | 0 |
| Discuss with Others | 3 | 7 | 5 | 4 | 4 | 4 | 4 | 2 | 7 |
| Information Seeking | 0 | 4 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
| Preparation | 0 | 3 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
| Totals | 8 | 23 | 17 | 11 | 4 | 7 | 7 | 4 | 7 |
| Phase 3: Adoption Phase | |||||||||
| Adjustment | 0 | 1 | 7 | 2 | 1 | 0 | 0 | 0 | 0 |
| Curiosity | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
| Excitement | 3 | 1 | 0 | 1 | 0 | 0 | 1 | 0 | 1 |
| Totals | 3 | 2 | 7 | 3 | 1 | 0 | 1 | 0 | 1 |
| Phase 4: Adaptation Phase | |||||||||
| Exploration | 0 | 0 | 4 | 2 | 2 | 1 | 2 | 3 | 0 |
| Novelty | 0 | 0 | 2 | 0 | 0 | 0 | 0 | 0 | 0 |
| Trial & Error | 0 | 8 | 4 | 5 | 2 | 2 | 0 | 0 | 2 |
| Personalization | 1 | 0 | 0 | 0 | 1 | 0 | 0 | 0 | 1 |
| Totals | 1 | 8 | 10 | 7 | 5 | 3 | 2 | 3 | 3 |
| Phase 5: Integration Phase | |||||||||
| Incorporation | 0 | 0 | 0 | 0 | 0 | 3 | 3 | 6 | 3 |
| Reinvention | 0 | 0 | 3 | 2 | 6 | 4 | 4 | 5 | 5 |
| Use Routines | 0 | 0 | 0 | 1 | 3 | 4 | 9 | 14 | 9 |
| Familiarization | 0 | 0 | 7 | 3 | 2 | 1 | 0 | 0 | 1 |
| Totals | 0 | 0 | 10 | 6 | 11 | 12 | 16 | 25 | 18 |
| Phase 6: Identification Phase | |||||||||
| Promotion to Others | 0 | 0 | 1 | 2 | 4 | 3 | 0 | 1 | 0 |
| Confirmation | 8 | 5 | 0 | 1 | 9 | 4 | 11 | 12 | 11 |
| Emotional Attachment | 0 | 0 | 2 | 0 | 0 | 0 | 0 | 0 | 0 |
| Identification | 1 | 5 | 1 | 0 | 2 | 5 | 1 | 0 | 2 |
| Maintenance | 0 | 0 | 3 | 3 | 1 | 0 | 1 | 0 | 1 |
| Personality Attribution | 0 | 0 | 1 | 2 | 0 | 1 | 3 | 2 | 3 |
| Recognize Benefits | 0 | 0 | 6 | 3 | 3 | 6 | 5 | 8 | 2 |
| Recognize Disadvantages | 8 | 0 | 7 | 5 | 10 | 7 | 10 | 17 | 13 |
| Totals | 17 | 10 | 21 | 16 | 29 | 26 | 31 | 40 | 32 |
| Phase ⌀: Non Use Phase | |||||||||
| Lack of Use | 0 | 0 | 2 | 4 | 6 | 0 | 0 | 0 | 0 |
| Non Acceptance | 0 | 1 | 0 | 1 | 0 | 4 | 4 | 12 | 6 |
| Suspension of Use | 0 | 6 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
| Totals | 0 | 7 | 2 | 5 | 6 | 4 | 4 | 12 | 6 |
Appendix E. Coding Scheme Revised
| Experience | Description | Rationale for Changes |
|---|---|---|
| Phase 1: Expectation Phase—All codes report to a mindset PRIOR to ENCOUNTERING the technology. | ||
| Predictions (+/−) | Users predict activities and uses for the technology upon its future arrival. Users consider what they will or might use it for in the (near) future. For example, considering how they intend to use it: Where it will be placed in their home; How it will fit into their daily life; Includes expectations about if they will become emotionally attached, and valence of attitudes they expect to have. | Previously de Graaf—Anticipation: User expresses expectations about the robot or its use. Added +/− options. |
| Association (+/−) | Users associate the technology with prior knowledge from their personal experiences and encounters. They associate or connect the technology to something they are already familiar with. Users may cite similarities or differences. This can be relevant to real life experiences (e.g., “It is like my brother’s Roomba”) or knowledge (e.g., “It is a bit different from Big Dog I saw on the news”) as well as science fiction (movies, television, books). It does not need to be an association related to technology. For example, they may say, “I don’t like new things”—thus associating it with something new. Associations can also be from other experiences with similar technologies. | Expanded upon de Graaf’s definition. Previously de Graaf had Association: User compares the robot or its use with something else. Added +/− options. |
| Physical Preparation | Users physically prepare their homes for the technology’s arrival. This might include preparing a safe and secure space for the technology as well as any possible needs it may have (Internet/charging ports/etc.). | Expanded upon de Graaf’s definition. De Graaf had Preparation: User is preparing him-/herself for the robot that is about to be delivered. |
| Phase 2: Adoption Phase—All codes report to a mindset POST to ENCOUNTERING the technology. | ||
| Novelty | Users are enthralled with the novelty of the technology. Users find themselves amazed, shocked, intrigued, and excited about the new technology. | Expanded upon de Graaf’s definition. De Graaf had Novelty: User perceives the robot as something new. |
| Use 1.0: Exploration | Users spend time exploring the technology and becoming better acquainted with it. This differs from Curiosity as the users actively are exploring possible uses and controls of the technology rather than pondering it. | Expanded upon de Graaf’s definition. De Graaf had Exploration: User is exploring how the robot works. We merged with Incorporation, Use Routines, and Maintenance to connect the flow of use throughout the acceptance process. |
| Connection to technology 1.0 Trial and Error | Users have explored the technology and have run into multiple errors during exploration. | Expanded upon de Graaf’s definition. De Graaf had Trial and Error: User is trying how the robot works and encounters some frustrations. |
| Phase 3: Adaptation Phase. | ||
| Use 2.0: Incorporation | Users have begun incorporating the technology into their regular routines and life. During this time, there may be schedules and routines forming to involve or alter use of the technology, but nothing has been declared or standardized. This can include either incorporating the technology into existing routines and incorporating new routines around the technology. | Expanded upon de Graaf’s definition. De Graaf had Incorporation: User has incorporated (the use of) the robot into his/her daily activities / routines. We merged with Use Routines, Maintenance, and Exploration to connect the flow of use throughout the acceptance process. |
| Connection to technology 2.0a Adaptation | Users begin adapting themselves to the technology and how they use it. The novelty effect has worn off and the technology is more settled into their lives. | Expanded upon de Graaf’s definition. De Graaf had Adoption Phase. Adjustment: User is adapting to the robot and how to use it. Changed the initial code name. |
| Connection to technology 2.0b Familiarization | Users have familiarized themselves with the technology and feel comfortable operating and using it. Comes after exploration and personalization (if applicable). Users have become familiar enough with the technology that they know they can now adjust it to suit their specific preferences or needs. | Expanded upon de Graaf’s definition. De Graaf had Adaptation/Integration Phase. Familiarization: User is getting familiar with how the robot works and what the robot has to offer. We connected this to Personalization and Exploration. User had fully explored and personalized (if applicable) the robot thus becoming completely familiar with it. |
| Phase 4: Integration Phase. | ||
| Use 3.0a: Reinvention | User is inventing new applications and utilizations for the robot. | Maintained original definition from de Graaf. |
| Use 3.0b: Maintenance | Users are maintaining the way they use the technology. Users’ initial incorporation of technology into a routine has been continued. They start to settle on how to incorporate the technology into more standardized routines that works for them. | Expanded upon de Graaf’s definition. De Graaf had Identification Phase. Maintenance: User is maintaining the way he/she is using the robot. We merged with Incorporation, Use Routines, and Exploration to connect the flow of use throughout the acceptance process. |
| Connection to technology 3.0 Personalization | Users tailor the technology to themselves. Comes after exploration and novelty. Users have become so familiar with the technology that they have adjusted it to suit their specific preferences or needs. | Expanded upon de Graaf’s definition. De Graaf had Adaptation Phase. Personalization: User is customizing the robot and its settings to his/her personal needs. We connected this to Familiarization and Exploration. User has explored the robot and has the ability to choose customized settings before becoming completely familiar with the technology. |
| Phase 5: Identification Phase. | ||
| Use 4.0 Routines | Users have fully incorporated the technology into their lives through new routines established solely for the technology’s inclusion. Users can’t imagine doing the routines without the technology. | Expanded upon de Graaf’s definition. De Graaf had Integration Phase. Use Routines: User has acquired a routine of using the robot. We merged with Incorporation, Maintenance, and Exploration to connect the flow of use throughout the acceptance process. |
| Connection to technology 4.0 Identification | Users have begun identifying themselves or others with the robot or its use. It is an extension of them in like how people feel towards their car or cellphone. | Expanded upon de Graaf’s definition. De Graaf had Identification Phase. Identification: User identifies themselves with the robot or its use. |
| Personality Attribution | User is ascribing the robot with human-like characteristics, such as personality, emotions, intentions, and needs. | Maintained original definition from de Graaf. |
| Emotional attachment | User expresses attachment to the technology. If you take it away, they would feel sad. | Expanded upon de Graaf’s definition. De Graaf had Identification Phase. Emotional Attachment: User is emotionally attached to the robot. |
| Phase ⌀: Non Use Phase. | ||
| Lack of Use | Users have decreased their frequency of using the technology. Transforms into Non Acceptance after two consecutive interviews of this code occurring. | New code implemented with codes from the Phased Framework of Technology Acceptance to cover the Non Use phase of acceptance. |
| Non Acceptance | User contemplated accepting the technology, but after a period of use and fully familiarizing themself with the technology, decided to abandon it. | New code implemented with codes from the Phased Framework of Technology Acceptance to cover the Non Use phase of acceptance. |
| Suspension of Use | Users have willingly stopped using the technology. | New code implemented with codes from the Phased Framework of Technology Acceptance to cover the Non Use phase of acceptance. |
| Experience | Description | Rationale for Changes |
|---|---|---|
| Attitude/Belief/Emotion/Opinion | ||
| Formation (+/−) | Users form attitudes (opinions) about the technology prior to encountering it. Attitudes here are based on anticipations for the technology, associations of it, and information they sought out about the technology and its uses (and not on actual experience of the technology in this context). For example, “I like new technologies; I will like this.” | Expanded upon de Graaf’s definition. De Graaf had Expectation Phase. Attitude Formation: User forms an opinion about the robot or its use. Added +/− options. |
| Adjustment (+/−) | Post encountering technology: Users adjust their preconceived attitudes/beliefs/opinions of the technology due to their early experiences. Users show different attitudes/beliefs/opinions/associations than when they considered the technology before using it (in this context). | Expanded upon de Graaf’s definition. De Graaf had Adoption Phase. Adjustment: User is adapting to the robot and how to use it. Added +/− options. |
| Confirmation (+/−) | Post encountering the technology: User finds confirmation for their previously formed attitudes and beliefs of the technology. Users show the same or similar attitudes/beliefs/opinions as when they considered the technology before using it (in this context), but with more evidence based on real experience. | Expanded upon de Graaf’s definition. De Graaf had Identification Phase. Confirmation: User seeks confirmation for or validates his/her opinion about the robot or its use. Added +/− options. |
| Discuss with Others | ||
| Discuss with Others 1.0 | Prior to encountering the technology: Talk to others about what they expect, their emotions about it, what they might want to do with it, etc. | Expanded upon de Graaf’s definition. De Graaf had Expectation Phase. Discuss with others: User has shared his/her experiences with the robot with others. |
| Discuss with Others 2.0 | Users have begun discussing the technology and their experience with others. Users are telling others what the technology is, what they are doing with it, their emotions about it, and what they might still want to do with it. Talking about ideas for the technology (e.g., “you could use it for hide ‘n’ seek!”), but not technologically how it works (e.g., “you can also mute yourself”). | Expanded upon de Graaf’s definition. De Graaf had Expectation Phase. Discuss with others: User has shared his/her experiences with the robot with others. Expanded to include discussion of predictions and actual experiences. |
| Knowledge Expansion | ||
| Curiosity | Users are curious about the technology to expand their overall understanding. Information is sought to better form anticipations and attitudes prior to the introduction to the technology. For example, they may ask friends or family members about what to expect, or find instructions or videos online, to help ground their expectations. Can include asking researchers about the technology. | Expanded upon de Graaf’s definition. De Graaf had Adoption Phase. Curiosity: User is curious about what the robot has to offer. |
| Information Seeking | Users are seeking information about the technology and eager to expand their understanding in applying to their individual life. Information is sought post the introduction of the technology (e.g., from the internet, the company, family, friends) to expand an understanding of the technology and better apply it to their individual life. This may help users use the technology correctly or discover more uses or ways to interact with it. They can begin exploring it. | Expanded upon de Graaf’s definition. De Graaf had Expectation Phase. Information Seeking: User is seeking information about the robot or its use. |
| Benefits/Disadvantages (+/−) | ||
| Preconceived Benefits /Disadvantages (+/−) | A concrete/specific benefit/disadvantage about this type of technology. E.g., The telepresence robot will help me talk to my friends. | New code implemented to differentiate between benefits and disadvantages prior to encountering the technology. Added +/− options. Expanded upon de Graaf’s definition. De Graaf had Identification Phase. Recognize Benefits: User acknowledges the benefits the robot has to offer. |
| Experienced Benefits /Disadvantages (+/−) | User actually experiences and expresses benefits / disadvantages of the technology. Users express concrete/specific benefits/disadvantages about this specific technology that they have experienced. A concrete/specific benefit/disadvantage about this type of technology. E.g., It was easy to use the telepresence robot to talk to my friends. | New code implemented to differentiate between benefits and disadvantages post to encountering the technology. Added +/− options. Expanded upon de Graaf’s definition. De Graaf had Identification Phase. Recognize Benefits: User acknowledges the benefits the robot has to offer. |
References
- Desai, M.; Tsui, K.M.; Yanco, H.A.; Uhlik, C. Essential features of telepresence robots. In Proceedings of the 2011 IEEE Conference on Technologies for Practical Robot Applications, Woburn, MA, USA, 11–12 April 2011; pp. 15–20. [Google Scholar] [CrossRef]
- Kristoffersson, A.; Loutfi, A.; Severinson-Eklundh, K. Measuring the quality of interaction in mobile robotic telepresence: A pilot’s perspective. Int. J. Soc. Robot. 2013, 5, 89–101. [Google Scholar] [CrossRef]
- Stoll, B.; Reig, S.; He, L.; Kaplan, I.; Jung, M.F.; Fussell, S.R. Wait, can you move the robot?: Examining telepresence robot use in collaborative teams. In Proceedings of the ACM/IEEE International Conference on Human-Robot Interaction, Chicago, IL, USA, 5–8 March 2018; IEEE Computer Society: New York, NY, USA, 2018; pp. 14–22. [Google Scholar] [CrossRef]
- Tree, J.E.F.; Herring, S.C.; Nguyen, A.; Whittaker, S.; Martin, R.; Takayama, L. Conversational fluency and attitudes towards robot pilots in telepresence robot-mediated interactions. Comput. Support. Coop. Work. CSCW 2023, 33, 473–498. [Google Scholar] [CrossRef]
- Seelye, A.M.; Wild, K.V.; Larimer, N.; Maxwell, S.; Kearns, P.; Kaye, J.A. Reactions to a remote-controlled video-communication robot in seniors’ homes: A pilot study of feasibility and acceptance. Telemed. E-Health 2012, 18, 755–759. [Google Scholar] [CrossRef] [PubMed]
- Cesta, A.; Cortellessa, G.; Orlandini, A.; Tiberio, L. Long-term evaluation of a telepresence robot for the elderly: Methodology and ecological case study. Int. J. Soc. Robot. 2016, 8, 421–441. [Google Scholar] [CrossRef]
- Niemelä, M.; Van Aerschot, L.; Tammela, A.; Aaltonen, I.; Lammi, H. Towards ethical guidelines of using telepresence robots in residential care. Int. J. Soc. Robot. 2021, 13, 431–439. [Google Scholar] [CrossRef]
- Lim, J. Effects of a cognitive-based intervention program using social robot PIO on cognitive function, depression, loneliness, and quality of life of older adults living alone. Front. Public Health 2023, 11, 1097485. [Google Scholar] [CrossRef]
- de Graaf, M.M.; Allouch, S.B.; van Dijk, J.A. A phased framework for long-term user acceptance of interactive technology in domestic environments. New Media Soc. 2018, 20, 2582–2603. [Google Scholar] [CrossRef]
- Rheman, J.M.; Baggett, R.P.; Simecek, M.; Fraune, M.R.; Tsui, K.M. Longitudinal Study of Mobile Telepresence Robots in Older Adults’ Homes: Uses, Social Connection, and Comfort with Technology. ACM Trans. Hum.-Robot Interact. 2024, 13, 1–41. [Google Scholar] [CrossRef]
- Baggett, R.; Simecek, M.; Tsui, K.M.; Fraune, M.R. Temporal Progression of Four Older Adults through Technology Acceptance Phases for a Mobile Telepresence Robot in Domestic Environments. Robotics 2024, 13, 95. [Google Scholar] [CrossRef]
- Shankar, A.; McMunn, A.; Banks, J.; Steptoe, A. Loneliness, social isolation, and behavioral and biological health indicators in older adults. Health Psychol. 2011, 30, 377. [Google Scholar] [CrossRef]
- House, J.S. Social isolation kills, but how and why? Psychosom. Med. 2001, 63, 273–274. [Google Scholar] [CrossRef] [PubMed]
- Cacioppo, J.T.; Hawkley, L.C. Social isolation and health, with an emphasis on underlying mechanisms. Perspect. Biol. Med. 2003, 46, S39–S52. [Google Scholar] [CrossRef] [PubMed]
- Park, C.; Majeed, A.; Gill, H.; Tamura, J.; Ho, R.C.; Mansur, R.B.; Nasri, F.; Lee, Y.; Rosenblat, J.D.; Wong, E.; et al. The effect of loneliness on distinct health outcomes: A comprehensive review and meta-analysis. Psychiatry Res. 2020, 294, 113514. [Google Scholar] [CrossRef]
- Thoits, P.A. Stress, coping, and social suppoty processes: Where are we? What next. J. Health Soc. Behav. 1995, 53–79. [Google Scholar] [CrossRef]
- Taylor, S.E.; Repetti, R.L.; Seeman, T. Health psychology: What is an unhealthy environment and how does it get under the skin? Annu. Rev. Psychol. 1997, 48, 411–447. [Google Scholar] [CrossRef]
- Cornwell, E.Y.; Waite, L.J. Social disconnectedness, perceived isolation, and health among older adults. J. Health Soc. Behav. 2009, 50, 31–48. [Google Scholar] [CrossRef]
- CDC. Indicator Definitions—Older Adults; Centers for Disease Control and Prevention: Atlanta, GA, USA, 2015.
- APA. Older Adults’ Health and Age-Related Changes; APA: Washington, DC, USA, 2021. [Google Scholar]
- NIH. Age; National Institutes of Health: Bethesda, MD, USA, 2022.
- Vincent, G.K.; Velkoff, V.A. The Next Four Decades: The Older Population in the United States: 2010 to 2050; U.S. Department of Commerce, Economics and Statistics Administration, U.S. Census Bureau: Washington, DC, USA, 2010.
- Toepoel, V. Ageing, leisure, and social connectedness: How could leisure help reduce social isolation of older people? Soc. Indic. Res. 2013, 113, 355–372. [Google Scholar] [CrossRef]
- Jamal, S.; Newbold, K.B. Factors associated with travel behavior of millennials and older adults: A scoping review. Sustainability 2020, 12, 8236. [Google Scholar] [CrossRef]
- Isabet, B.; Pino, M.; Lewis, M.; Benveniste, S.; Rigaud, A.S. Social telepresence robots: A narrative review of experiments involving older adults before and during the COVID-19 pandemic. Int. J. Environ. Res. Public Health 2021, 18, 3597. [Google Scholar] [CrossRef]
- Rodney, T.; Josiah, N.; Baptiste, D.L. Loneliness in the time of COVID-19: Impact on older adults. J. Adv. Nurs. 2021, 77, e24–e26. [Google Scholar] [CrossRef]
- Tuli, T.B.; Terefe, T.O.; Rashid, M.M.U. Telepresence mobile robots design and control for social interaction. Int. J. Soc. Robot. 2021, 13, 877–886. [Google Scholar] [CrossRef]
- Moyle, W.; Jones, C.; Cooke, M.; O’dwyer, S.; Sung, B.; Drummond, S. Connecting the person with dementia and family: A feasibility study of a telepresence robot. BMC Geriatr. 2014, 14, 7. [Google Scholar] [CrossRef] [PubMed]
- Fraune, M.R.; Komatsu, T.; Preusse, H.R.; Langlois, D.K.; Au, R.H.Y.; Ling, K.; Suda, S.; Nakamura, K.; Tsui, K.M. Socially facilitative robots for older adults to alleviate social isolation: A participatory design workshop approach in the US and Japan. Front. Psychol. 2022, 13. [Google Scholar] [CrossRef] [PubMed]
- Ling, K.; Langlois, D.; Preusse, H.; Rheman, J.M.; Parson, D.; Kuballa, S.; Simecek, M.; Tsui, K.M.; Fraune, M.R. “If you weren’t connected to the Internet, you were not alive”: Experience of using social technology during COVID-19 in adults 50+. Front. Public Health 2023, 11. [Google Scholar] [CrossRef] [PubMed]
- Pirhonen, J.; Melkas, H.; Laitinen, A.; Pekkarinen, S. Could robots strengthen the sense of autonomy of older people residing in assisted living facilities?—A future-oriented study. Ethics Inf. Technol. 2020, 22, 151–162. [Google Scholar] [CrossRef]
- Boudouraki, A.; Fischer, J.E.; Reeves, S.; Rintel, S. ‘Being in on the action’ in mobile robotic telepresence: Rethinking presence in hybrid participation. In Proceedings of the ACM/IEEE International Conference on Human-Robot Interaction, Stockholm, Sweden, 13–16 March 2023; IEEE Computer Society: New York, NY, USA, 2023; pp. 63–71. [Google Scholar] [CrossRef]
- Krupp, M.M.; Rueben, M.; Grimm, C.M.; Smart, W.D. A focus group study of privacy concerns about telepresence robots. In Proceedings of the 2017 26th IEEE International Symposium on Robot and Human Interactive Communication (RO-MAN), Lisbon, Portugal, 28 August–1 September 2017; pp. 1451–1458. [Google Scholar] [CrossRef]
- Momani, A.M.; Jamous, M. The evolution of technology acceptance theories. Int. J. Contemp. Comput. Res. (IJCCR) 2017, 1, 51–58. [Google Scholar]
- Taherdoost, H. A review of technology acceptance and adoption models and theories. Procedia Manuf. 2018, 22, 960–967. [Google Scholar] [CrossRef]
- Ajzen, I. Understanding Attitudes and Predictiing Social Behavior; Prentice-Hall: Englewood Cliffs, NJ, USA, 1980. [Google Scholar]
- Ajzen, I. From intentions to actions: A theory of planned behavior. In Action Control: From Cognition to Behavior; Springer: Berlin/Heidelberg, Germany, 1985; pp. 11–39. [Google Scholar] [CrossRef]
- Ajzen, I. The theory of planned behavior. Organ. Behav. Hum. Decis. Process. 1991, 50, 179–211. [Google Scholar] [CrossRef]
- Rana, N.P.; Dwivedi, Y.K. Citizen’s adoption of an e-government system: Validating extended social cognitive theory (SCT). Gov. Inf. Q. 2015, 32, 172–181. [Google Scholar] [CrossRef]
- Venkatesh, V. Determinants of perceived ease of use: Integrating control, intrinsic motivation, and emotion into the technology acceptance model. Inf. Syst. Res. 2000, 11, 342–365. [Google Scholar] [CrossRef]
- Davis, F. A Technology Acceptance Model for Empirically Testing New End-User Information Systems: Theory and Results. Ph.D. Thesis, Massachusetts Institute of Technology, Cambridge, MA, USA, 1985. [Google Scholar]
- Breiki, M.A.; Al-Abri, A. The extended technology acceptance model (ETAM): Examining students’ acceptance of online learning during COVID-19 pandemic. Int. J. Emerg. Technol. Learn. 2022, 17, 4–19. [Google Scholar] [CrossRef]
- Mun, Y.Y.; Jackson, J.D.; Park, J.S.; Probst, J.C. Understanding information technology acceptance by individual professionals: Toward an integrative view. Inf. Manag. 2006, 43, 350–363. [Google Scholar]
- Raman, A. University Management Information System (UMIS) acceptance among university student: Applying the Extended Technology Acceptance Model (ETAM). J. Stud. Educ. 2011, 1, E8. [Google Scholar] [CrossRef]
- Venkatesh, V.; Morris, M.G.; Davis, G.B.; Davis, F.D. User acceptance of information technology: Toward a unified view. MIS Q. 2003, 27, 425–478. [Google Scholar] [CrossRef]
- Dwivedi, Y.K.; Rana, N.P.; Jeyaraj, A.; Clement, M.; Williams, M.D. Re-examining the unified theory of acceptance and use of technology (UTAUT): Towards a revised theoretical model. Inf. Syst. Front. 2019, 21, 719–734. [Google Scholar] [CrossRef]
- Loges, W.E.; Jung, J.Y. Exploring the digital divide: Internet connectedness and age. Commun. Res. 2001, 28, 536–562. [Google Scholar] [CrossRef]
- Fearn, M.; Harper, R.; Major, G.; Bhar, S.; Bryant, C.; Dow, B.; Dunt, D.; Mnatzaganian, G.; O’Connor, D.; Ratcliffe, J.; et al. Befriending older adults in nursing homes: Volunteer perceptions of switching to remote befriending in the COVID-19 era. Clin. Gerontol. 2021, 44, 430–438. [Google Scholar] [CrossRef]
- Wu, X.; Nix, L.C.; Brummett, A.M.; Aguillon, C.; Oltman, D.J.; Beer, J.M. The design, development, and evaluation of telepresence interfaces for aging adults: Investigating user perceptions of privacy and usability. Int. J. Hum.-Comput. Stud. 2021, 156, 102695. [Google Scholar] [CrossRef]
- Ezer, N.; Fisk, A.D.; Rogers, W.A. Attitudinal and intentional acceptance of domestic robots by younger and older adults. In Universal Access in Human-Computer Interaction. Intelligent and Ubiquitous Interaction Environments, Proceedings of the 5th International Conference, UAHCI 2009, Held as Part of HCI International 2009, San Diego, CA, USA, 19–24 July 2009; Lecture Notes in Computer Science (Including Subseries Lecture Notes in Artificial Intelligence and Lecture Notes in Bioinformatics); Springer: Berlin/Heidelberg, Germany, 2009; Volume 5615 LNCS, pp. 39–48. [Google Scholar] [CrossRef]
- Renaud, K.; Van Biljon, J. Predicting technology acceptance and adoption by the elderly: A qualitative study. In Proceedings of the 2008 Annual Research Conference of the South African Institute of Computer Scientists and Information Technologists on IT Research in Developing Countries: Riding the Wave of Technology, Wilderness, South Africa, 6–8 October 2008; pp. 210–219. [Google Scholar] [CrossRef]
- Sung, J.; Christensen, H.I.; Grinter, R.E. Robots in the wild: Understanding long-term use. In Proceedings of the 2009 4th ACM/IEEE International Conference on Human-Robot Interaction (HRI), La Jolla, CA, USA, 9–13 March 2009; pp. 45–52. [Google Scholar] [CrossRef]
- Ghapanchi, A.H.; Talaei-Khoei, A. Rethinking technology acceptance: Towards a theory of technology utilization. In Proceedings of the Americas Conference on Information Systems, New Orleans, LA, USA, 16–18 August 2018; pp. 1–9. [Google Scholar]
- Silverstone, R.; Haddon, L. Design and the domestication of information and communication technologies: Technical change and everyday life. In Communication By Design: The Politics of Information and Communication Technologies; Oxford Academic: Oxford, UK, 1996. [Google Scholar] [CrossRef]
- Rogers, E.M. Diffusion of Innovations, 4th ed.; Free Press: New York, NY, USA, 1995. [Google Scholar]
- Orr, G. Diffusion of innovations, by Everett Rogers (1995). Retrieved January, 21, 2005. Available online: https://teddykw2.wordpress.com/wp-content/uploads/2012/07/everett-m-rogers-diffusion-of-innovations.pdf (accessed on 30 March 2025).
- Ittersum, K.V.; Rogers, W.A.; Capar, M.; Caine, K.E.; O’Brien, M.A.; Parsons, L.J.; Fisk, A.D. Understanding Technology Acceptance: Phase 1—Literature Review and Qualitative Model Development Requests for More Information May Be Sent to Background and Overview; Georgia Institute of Technology: Atlanta, GA, USA, 2006. [Google Scholar]
- Sung, J.; Grinter, R.E.; Christensen, H.I. Domestic robot ecology: An initial framework to unpack long-term acceptance of robots at home. Int. J. Soc. Robot. 2010, 2, 417–429. [Google Scholar] [CrossRef]
- Karapanos, E.; Zimmerman, J.; Forlizzi, J.; Martens, J.B. User experience over time. In Proceedings of the SIGCHI Conference on Human Factors in Computing Systems, Boston, MA, USA, 4–9 April 2009; ACM: New York, NY, USA, 2009; pp. 729–738. [Google Scholar] [CrossRef]
- Hiltz, S.R.; Johnson, K. Measuring acceptance of computer-mediated communication systems. J. Am. Soc. Inf. Sci. 1989, 40, 386–397. [Google Scholar] [CrossRef]
- Lohse, M. Bridging the gap between users’ expectations and system evaluations. In Proceedings of the 2011 RO-MAN, Atlanta, GA, USA, 31 July–3 August 2011; pp. 485–490. [Google Scholar] [CrossRef]
- Demiris, G.; Oliver, D.P.; Dickey, G.; Skubic, M.; Rantz, M. Findings from a participatory evaluation of a smart home application for older adults. Technol. Health Care 2008, 16, 111–118. [Google Scholar] [CrossRef]
- Rice, R.E.; Contractor, N.S. Conceptualizing effects of office information systems: A methodology and application for the study of alpha, beta, and gamma changes. Decis. Sci. 1990, 21, 301–317. [Google Scholar] [CrossRef]
- van Biljon, J.; Renaud, K. A qualitative study of the applicability of technology acceptance models to senior mobile phone users. In Advances in Conceptual Modeling—Challenges and Opportunities, Proceedings of the ER 2008 Workshops CMLSA, ECDM, FP-UML, M2AS, RIGiM, SeCoGIS, WISM, Barcelona, Spain, 20–23 October 2008; Springer: Berlin/Heidelberg, Germany, 2008. [Google Scholar] [CrossRef]
- Graaf, M.D.; Allouch, S.B.; Dijk, J.V. Why do they refuse to use my robot?: Reasons for non-use derived from a long-term home study. In Proceedings of the ACM/IEEE International Conference on Human-Robot Interaction, Vienna, Austria, 6–9 March 2017; IEEE Computer Society: New York, NY, USA, 2017; Volume Part F127194, pp. 224–233. [Google Scholar] [CrossRef]
- Chau, P.Y.K.; Tam, K.Y.; Chau, P.Y.; Kong, H. Factors affecting the adoption of open systems: An exploratory study factors affecting the adoption of open systems: An exploratory study. MIS Q. 1997, 21, 1–24. [Google Scholar] [CrossRef]
- Lin, Y.; Wang, C.; Chang, Y.; Wang, J. Effects of the biopsychosocial functional activity program on cognitive function for community older adults with mild cognitive impairment: A cluster-randomized controlled trial. Nurs. Health Sci. 2020, 22, 1065–1075. [Google Scholar] [CrossRef] [PubMed]
- Double Robotics. Double 3, Double Robotics—Telepresence Robot for the Hybrid Office. 2019. Available online: https://www.doublerobotics.com (accessed on 10 May 2024).
- Forlizzi, J.; Disalvo, C. Service robots in the domestic environment: A study of the Roomba vacuum in the home. In Proceedings of the 1st ACM SIGCHI/SIGART Conference on Human-Robot Interaction, Salt Lake City, UT, USA, 2–3 March 2006; pp. 258–265. [Google Scholar] [CrossRef]
- Heshmat, Y.; Jones, B.; Xiong, X.; Neustaedter, C.; Tang, A.; Riecke, B.E.; Yang, L. Geocaching with a Beam: Shared outdoor activities through a telepresence robot with 360 degree viewing. In Proceedings of the Conference on Human Factors in Computing Systems, Montreal, QC, Canada, 21–26 April 2018; Association for Computing Machinery: New York, NY, USA, 2018; pp. 1–13. [Google Scholar] [CrossRef]
- Korblet, V.M.; Karreman, J.; Rompay, T.V. The Acceptance of Mobile Telepresence Robots by Elderly People. Master’s Thesis, University of Twente, Enschede, The Netherlands, 2019. [Google Scholar]
- King, N.; Horrocks, C.; Brooks, J. Interviews in Qualitative Research, 2nd ed.; SAGE Publications: Thousand Oaks, CA, USA, 2019. [Google Scholar]
- Saldaña, J. The Coding Manual for Qualitative Researchers; SAGE Publications: Thousand Oaks, CA, USA, 2021. [Google Scholar]
- Schneberger, S.; Amoroso, D.L.; Durfee, A. Factors that influence the performance of computer-based assessments: An extension of the technology acceptance model. J. Comput. Inf. Syst. 2008, 48, 74–90. [Google Scholar] [CrossRef]
- Hong, S.; Thong, J.Y.; Tam, K.Y. Understanding continued information technology usage behavior: A comparison of three models in the context of mobile internet. Decis. Support Syst. 2006, 42, 1819–1834. [Google Scholar] [CrossRef]
- Eriksson, K.; Nilsson, D. Determinants of the continued use of self-service technology: The case of Internet banking. Technovation 2007, 27, 159–167. [Google Scholar] [CrossRef]
- Lin, K.M.; Chen, N.S.; Fang, K. Understanding e-learning continuance intention: A negative critical incidents perspective. Behav. Inf. Technol. 2011, 30, 77–89. [Google Scholar] [CrossRef]
- Behrenbruch, K.; Söllner, M.; Leimeister, J.M.; Schmidt, L. Understanding diversity—The impact of personality on technology acceptance. In Human-Computer Interaction—INTERACT 2013, Proceedings of the 14th IFIP TC 13 International Conference, Part IV 14, Cape Town, South Africa, 2–6 September 2013; Springer: Berlin/Heidelberg, Germany, 2013; pp. 306–313. [Google Scholar] [CrossRef]
- Yeo, V.C.S.; Goh, S.K.; Rezaei, S. Consumer experiences, attitude and behavioral intention toward online food delivery (OFD) services. J. Retail. Consum. Serv. 2017, 35, 150–162. [Google Scholar] [CrossRef]
- Humbani, M.; Wiese, M. An integrated framework for the adoption and continuance intention to use mobile payment apps. Int. J. Bank Mark. 2019, 37, 646–664. [Google Scholar] [CrossRef]
- Kraus, M.; Wagner, N.; Untereiner, N.; Minker, W. Including social expectations for trustworthy proactive human-robot dialogue. In Proceedings of the 30th ACM Conference on User Modeling, Adaptation and Personalization, Barcelona, Spain, 4–7 July 2022; pp. 23–33. [Google Scholar] [CrossRef]
- LeRouge, C.; Ma, J.; Sneha, S.; Tolle, K. User profiles and personas in the design and development of consumer health technologies. Int. J. Med. Inform. 2013, 82, e251–e268. [Google Scholar] [CrossRef] [PubMed]
- Venkatesh, V.; Davis, F.D. A theoretical extension of the technology acceptance model: Four longitudinal field studies. Manag. Sci. 2000, 46, 186–204. [Google Scholar] [CrossRef]
- Ma, Q.; Chan, A.H.; Chen, K. Personal and other factors affecting acceptance of smartphone technology by older Chinese adults. Appl. Ergon. 2016, 54, 62–71. [Google Scholar] [CrossRef]
- Sipior, J.C.; Ward, B.T.; Connolly, R. The digital divide and t-government in the United States: Using the technology acceptance model to understand usage. Eur. J. Inf. Syst. 2011, 20, 308–328. [Google Scholar] [CrossRef]
- Triandis, H.C. Values, attitudes, and interpersonal behavior. In Nebraska Symposium on Motivation; University of Nebraska Press: Lincoln, NE, USA, 1979; Volume 27, pp. 195–259. [Google Scholar]
- Limayem, M.; Khalifa, M.; Chin, W.W. Factors motivating software piracy: A longitudinal study. IEEE Trans. Eng. Manag. 2004, 51, 414–425. [Google Scholar] [CrossRef]
- Costa, P.T., Jr.; McCrae, R.R. Four ways five factors are basic. Personal. Individ. Differ. 1992, 13, 653–665. [Google Scholar] [CrossRef]
- Devaraj, S.; Easley, R.F.; Crant, J.M. How does personality matter? Relating the five-factor model to technology acceptance and use. Inf. Syst. Res. 2008, 19, 93–105. [Google Scholar] [CrossRef]
- Seibert, D.; Godulla, A.; Wolf, C. Understanding How Personality Affects the Acceptance of Technology: A Literature Review. Social Science Open Access Repository. Available online: https://nbn-resolving.org/urn:nbn:de:0168-ssoar-75164-7 (accessed on 30 March 2025).
- Paepcke, S.; Takayama, L. Judging a bot by its cover: An experiment on expectation setting for personal robots. In Proceedings of the 2010 5th ACM/IEEE International Conference on Human-Robot Interaction (HRI), Osaka, Japan, 2–5 March 2010; pp. 45–52. [Google Scholar] [CrossRef]
- Horstmann, A.C.; Krämer, N.C. When a Robot Violates Expectations: The Influence of Reward Valence and Expectancy Violation on People’s Evaluation of a Social Robot. In Proceedings of the Companion of the 2020 ACM/IEEE International Conference on Human-Robot Interaction, Cambridge, UK, 23–26 March 2020; pp. 254–256. [Google Scholar] [CrossRef]
- Coorevits, L.; Schuurman, D.; Oelbrandt, K.; Logghe, S. Bringing personas to life: User experience design through interactive coupled open innovation. Pers. Stud. 2016, 2, 97–114. [Google Scholar] [CrossRef]
- Marsden, N.; Pröbster, M. Personas and identity: Looking at multiple identities to inform the construction of personas. In Proceedings of the 2019 CHI Conference on Human Factors in Computing Systems, Glasgow, UK, 4–9 May 2019; pp. 1–14. [Google Scholar] [CrossRef]
- Goh, C. Acceptance research on the adaptation of target audience personas in graphic design. Adv. Soc. Sci. Res. J. 2020, 7, 100–109. [Google Scholar] [CrossRef]
- Fernaeus, Y.; Håkansson, M.; Jacobsson, M.; Ljungblad, S. How do you play with a robotic toy animal? A long-term study of Pleo. In Proceedings of the 9th International Conference on Interaction Design and Children, Barcelona, Spain, 9–12 June 2010; pp. 39–48. [Google Scholar] [CrossRef]
- Fink, J.; Bauwens, V.; Kaplan, F.; Dillenbourg, P. Living with a vacuum cleaning robot: A 6-month ethnographic study. Int. J. Soc. Robot. 2013, 5, 389–408. [Google Scholar] [CrossRef]
- Alwabel, A.S.A.; Zeng, X.J. Data-driven modeling of technology acceptance: A machine learning perspective. Expert Syst. Appl. 2021, 185, 115584. [Google Scholar] [CrossRef]
- Chung, D.; Jeong, P.; Kwon, D.; Han, H. Technology acceptance prediction of robo-advisors by machine learning. Intell. Syst. Appl. 2023, 18, 200197. [Google Scholar] [CrossRef]
- Tsui, K.M. The Development of Telepresence Robots for People with Disabilities. Ph.D. Thesis, University of Massachusetts Lowell, Lowell, MA, USA, 2014. [Google Scholar]


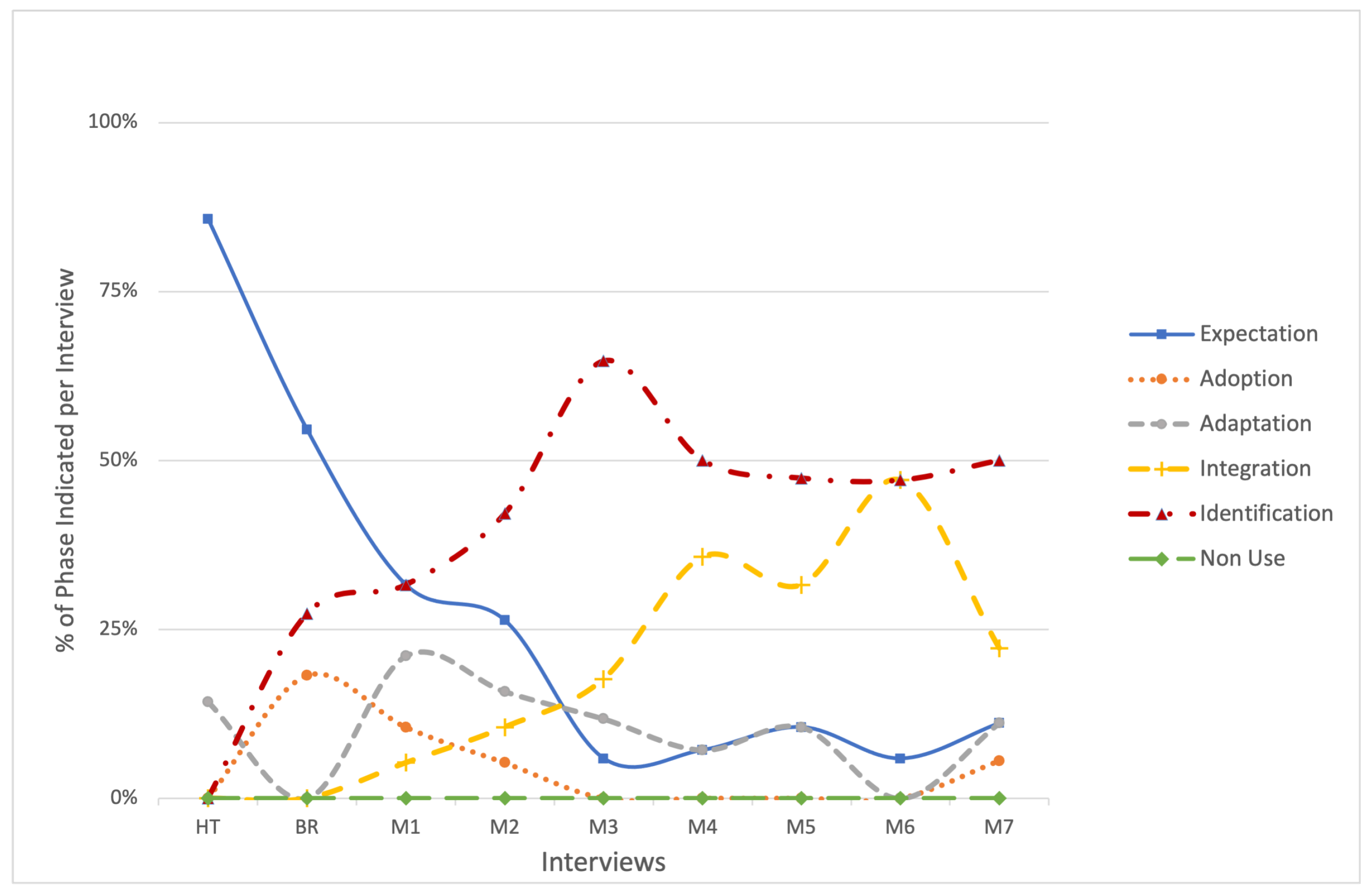
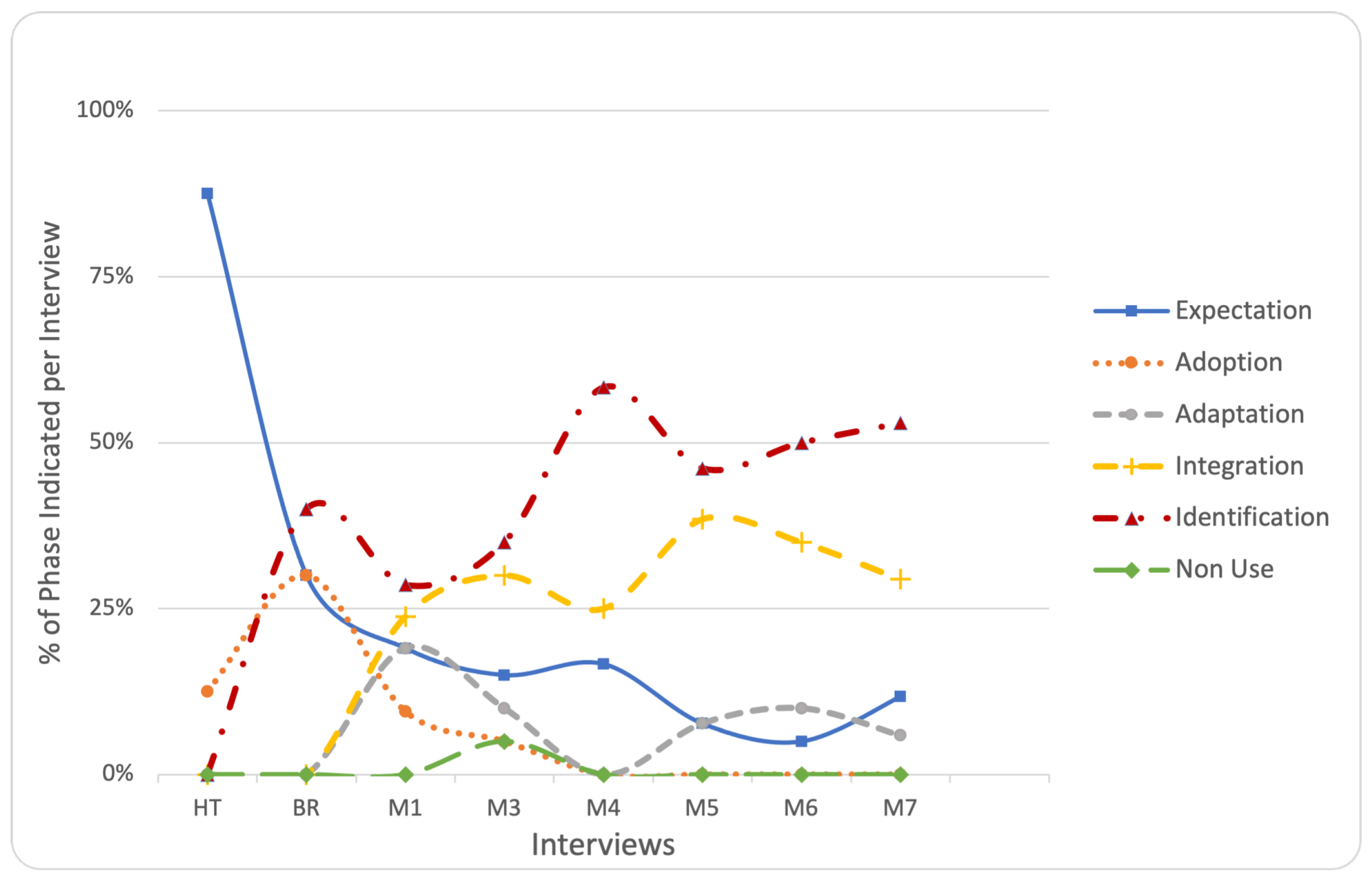


| Acceptance Phase | Timeline |
|---|---|
| Expectation | Two weeks prior to the introduction of the technology. |
| Encounter | Introduce the technology. |
| Adoption | Two weeks after the introduction of the technology. |
| Adaptation | One month after the introduction of the technology. |
| Integration | Two months after the introduction of the technology. |
| Identification | Six months after the introduction of the technology. |
| Non Use | Can occur at any time. |
| Element | Timeline | Description | # of Times per P |
|---|---|---|---|
| House Tour | 2 weeks before introducing the robot | Assess if the home can hold the robot (e.g., clear walkways, stable internet; 30 min); interview (30 min). | 1 |
| Bringing robots | Introduction of the robot. | Bring the robot to participant homes. Set up the robot; interview (60 min). | 1 |
| Main sessions | Months 1–7 | Monthly shared activity with participants and IPs (20 min). Post-activity interview (40 min). | 7 |
| Final Session | 2–4 weeks after the 7th monthly session | Remove robots; interview (60 min) | 1 |
| Occurrence | Definition |
|---|---|
| Primary Peak | The highest point of a given phase. |
| Secondary Peak | Any point that is higher than the points on either side and is not the primary peak. Must be 10% or greater. Points with no data on either side (like House Tour and Month 7) can be peaks). |
| Hill | Any point that is higher than the points on either side, but less than 10%. |
| Valley | Any point that is lower than the points on either side. |
| Ascent | Any point that is higher than the previous point. |
| Descent | Any point that is lower than the previous point. |
| Participant | Expectation | Encounter | Adoption | Adaptation | Integration | Identification | Non Use |
|---|---|---|---|---|---|---|---|
| Sasha | HT | BR | BR | M1 | M6 | M3 | - |
| Kelly | HT | BR | BR | M1 | M5 | M4 | M3 * |
| David | HT | BR | HT | M2 | M5 | M3 | M1 * |
| Jessica | HT | BR | HT | M1 | M6 | M5 | M3 |
| Phase | House Tour | Bringing Robot | M1 | M2 | M3 | M4 | M5 | M6 | M7 |
|---|---|---|---|---|---|---|---|---|---|
| Expectation1 | PP | D | D | D | - | - | SP | - | SP |
| Adoption3 | - | PP | D | - | - | - | - | - | - |
| Adaptation4 | SP | - | PP | D | D | - | SP | - | SP |
| Integration5 | - | - | - | A | A | SP | V | PP | D |
| Identification6 | - | A | A | A | PP | D | D | D | SP |
| Non Use⌀ | - | - | - | - | - | - | - | - | SP |
| Phase | House Tour | Bringing Robot | M1 | M2 | M3 | M4 | M5 | M6 | M7 |
|---|---|---|---|---|---|---|---|---|---|
| Expectation1 | PP | D | D | - | D | SP | - | - | SP |
| Adoption3 | A | PP | - | - | - | - | - | - | - |
| Adaptation4 | - | - | PP | - | D | - | - | SP | - |
| Integration5 | - | - | A | - | SP | V | PP | D | D |
| Identification6 | - | SP | V | - | A | PP | V | A | SP |
| Non Use⌀ | - | - | - | - | H | - | - | - | - |
| Phase | House Tour | Bringing Robot | M1 | M2 | M3 | M4 | M5 | M6 | M7 |
|---|---|---|---|---|---|---|---|---|---|
| Expectation1 | PP | D | D | D | - | - | SP | - | SP |
| Adoption3 | PP | - | SP | - | - | - | - | - | - |
| Adaptation4 | - | - | - | PP | - | - | - | - | - |
| Integration5 | - | SP | V | SP | V | A | PP | V | SP |
| Identification6 | - | A | SP | A | PP | D | V | SP | D |
| Non Use⌀ | - | - | H | - | - | - | - | - | - |
| Phase | House Tour | Bringing Robot | M1 | M2 | M3 | M4 | M5 | M6 | M7 |
|---|---|---|---|---|---|---|---|---|---|
| Expectation1 | PP | D | D | SP | - | SP | D | - | - |
| Adoption3 | PP | - | - | SP | - | - | - | - | - |
| Adaptation4 | - | - | PP | - | - | - | - | - | - |
| Integration5 | - | - | - | - | - | - | - | PP | - |
| Identification6 | - | A | SP | D | D | - | PP | V | SP |
| Non Use⌀ | - | - | A | A | PP | D | V | SP | D |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Baggett, R.; Simecek, M.; Chambellan, C.; Fraune, M.R.; Tsui, K.M. Fluidity in the Phased Framework of Technology Acceptance: A Case Study to Understand (Older Adult) Participant Journeys Through Acceptance Phases with Mobile Telepresence Robots. Appl. Sci. 2025, 15, 4233. https://doi.org/10.3390/app15084233
Baggett R, Simecek M, Chambellan C, Fraune MR, Tsui KM. Fluidity in the Phased Framework of Technology Acceptance: A Case Study to Understand (Older Adult) Participant Journeys Through Acceptance Phases with Mobile Telepresence Robots. Applied Sciences. 2025; 15(8):4233. https://doi.org/10.3390/app15084233
Chicago/Turabian StyleBaggett, Rune, Martin Simecek, Candace Chambellan, Marlena R. Fraune, and Katherine M. Tsui. 2025. "Fluidity in the Phased Framework of Technology Acceptance: A Case Study to Understand (Older Adult) Participant Journeys Through Acceptance Phases with Mobile Telepresence Robots" Applied Sciences 15, no. 8: 4233. https://doi.org/10.3390/app15084233
APA StyleBaggett, R., Simecek, M., Chambellan, C., Fraune, M. R., & Tsui, K. M. (2025). Fluidity in the Phased Framework of Technology Acceptance: A Case Study to Understand (Older Adult) Participant Journeys Through Acceptance Phases with Mobile Telepresence Robots. Applied Sciences, 15(8), 4233. https://doi.org/10.3390/app15084233