
Automatic Feature Construction-Based Genetic Programming for Degraded Image Classification

Abstract
1. Introduction
- (1)
- Due to the limitations in program structure and node design in existing GP methods, the performance of GP individuals is restricted. To address this, the study develops a new program structure based on information transmission, which is centered on allowing nodes in specific layers to transmit effective information to subsequent layers. Such a design aids GP individuals in constructing distinctive features, thereby enhancing their performance as solutions for classification tasks.
- (2)
- To solve the problem of stagnation in fitness growth of the best GP individuals during the iterative process, this study proposes an accompanying evolution strategy. When stagnation in the fitness growth of the best GP individuals is detected, this strategy will guide the population toward exploring in the direction of more optimized GP individuals.
- (3)
- To address the potential overfitting issue when using a single GP individual as the solution, this study proposes a multi-generational individual ensemble strategy. This strategy, by combining several efficient GP individuals, constructs an ensemble GP individual with stronger generalization capabilities, effectively reducing the overfitting phenomenon.
- (4)
- ITACIE-GP is an effective method suitable for degraded image classification tasks. This method evaluates its performance in original, blurry, low contrast, noisy, and occlusion scenarios for six different types of datasets. It has been compared with several benchmark methods. Moreover, through detailed program examples, this paper delves into the reasons behind the high performance demonstrated by this method.
2. Related Work
2.1. GP and Strongly Typed GP
2.2. Degraded Image
2.3. Image Classification Methods
2.3.1. Manual Feature-Based Image Classification Methods
2.3.2. CNN-Based Image Classification Methods
2.3.3. GP-Based Image Classification Methods
3. The Proposed Approach
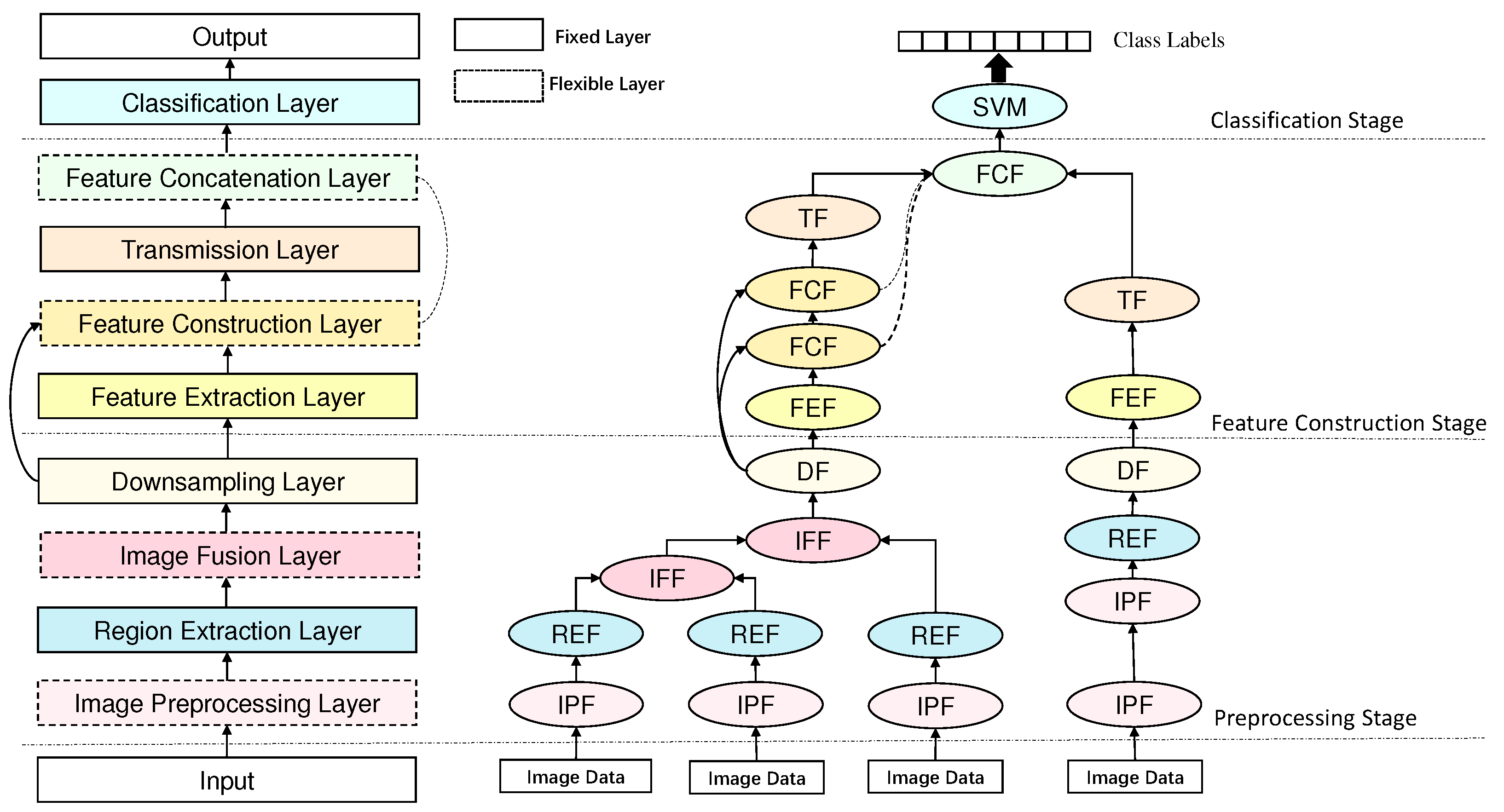
3.1. Algorithmic Framework
3.2. New Program Structure Based on Information Transmission
3.2.1. New Function and Terminal Set
3.2.2. Fitness Function
3.3. Accompanying Evolution
3.3.1. Storage Strategy
3.3.2. Replacement Strategy
3.4. Multi-Generation Individual Ensemble Strategy
4. Experimental Design
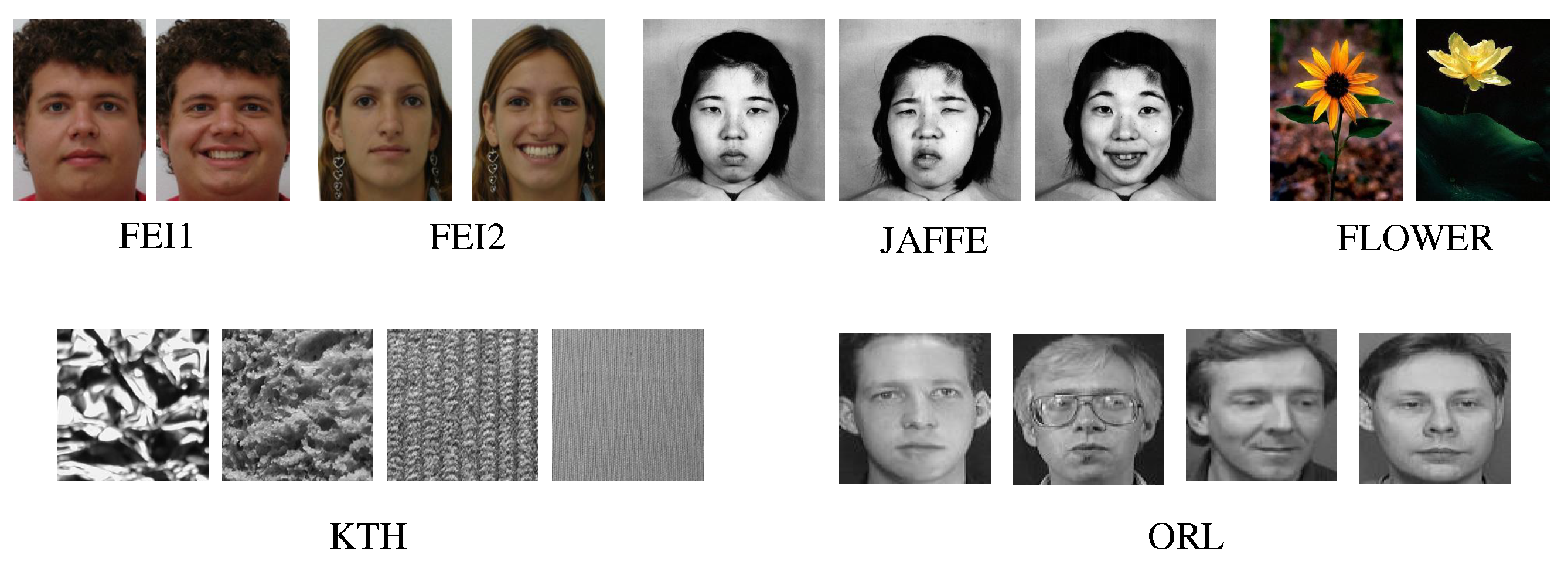
4.1. Benchmark Datasets
4.2. Benchmark Methods
4.3. Parameter Settings
5. Results and Discussion
5.1. Classification Performance
5.2. Ablation Experiments
5.3. Performance Analysis
5.3.1. Example Program of FEI1 Dataset under Occlusion Scenarios
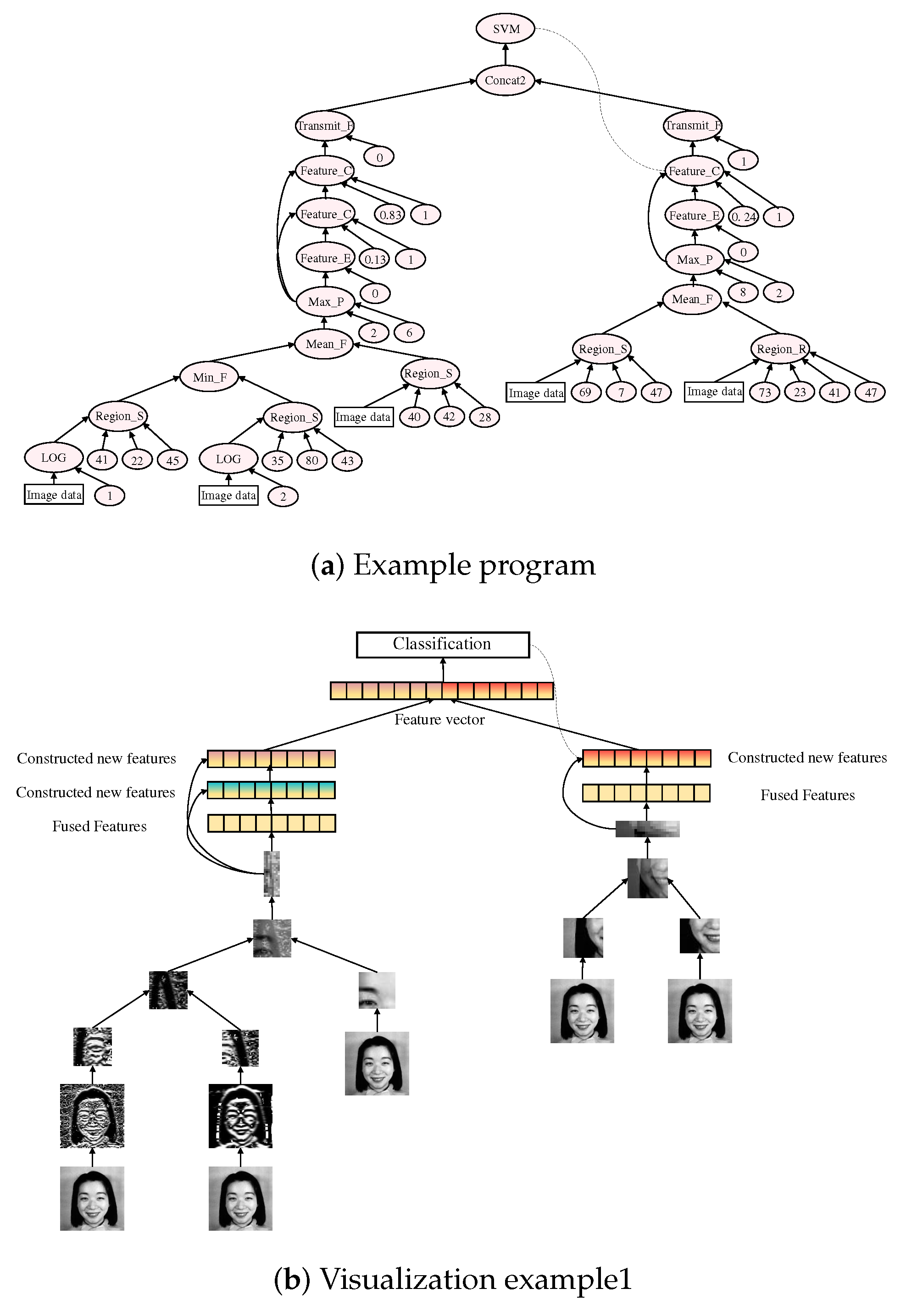
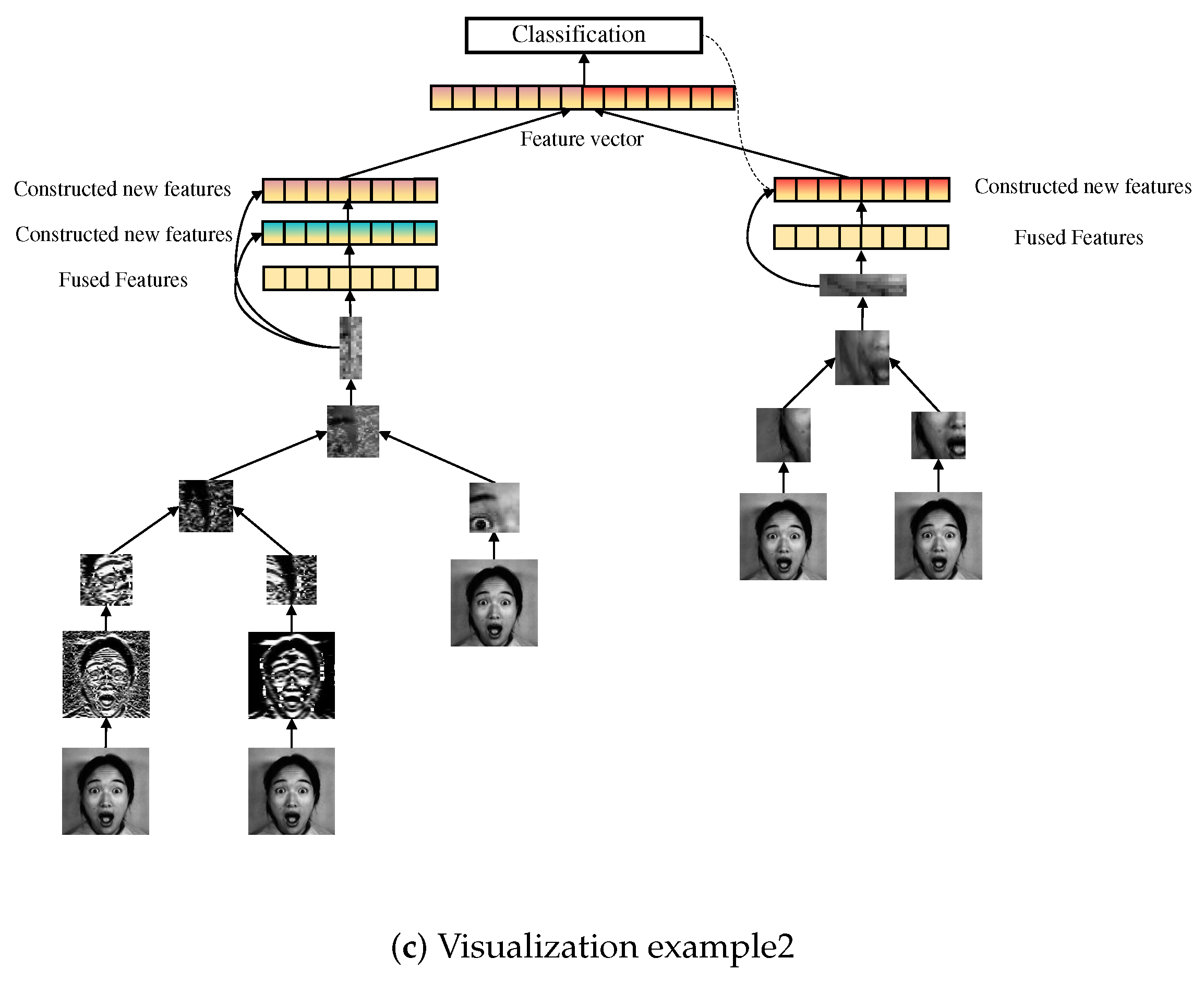
5.3.2. Example Program of the JAFFE Dataset in the Original Scenarios
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| GP | Genetic Programming |
| LBP | Local Binary Patterns |
| SIFT | Scale-Invariant Feature Transform |
| HOG | Histogram of Oriented Gradients |
| CNNs | Convolutional Neural Networks |
| STGP | Strongly Typed Genetic Programming |
| SVM | Support Vector Machine |
| BoW | Bag of Words |
| RF | Random Forest |
| IPF | Image Preprocessing Layer Function |
| REF | Region Extraction Layer Function |
| IFF | Image Fusion Layer Function |
| DF | Downsampling Layer Function |
| FEF | Feature Extraction Layer Function |
| FCF | Feature Construction Layer Function |
| TF | Transmission Layer Function |
| FCF | Feature Concatenation Layer Function |
| Min_F | Minimum Fusion Function |
| Med_F | Median Fusion Function |
| Mean_F | Mean Fusion Function |
| Max_P | Max Pooling Function |
| Ave_P | Average Pooling Function |
| Bilin_D | Bilinear Downsampling Function |
| Feature_E | Feature Extraction Function |
| Feature_C | Feature Construction Function |
| Transmit_F | Transmission Layer Function |
| Concat2 | Feature Concatenation Function |
| DWT | Discrete Wavelet Transform |
| LeNet-5 | LeNet-5 Convolutional Neural Network |
| CNN-5 | 5-Layer Convolutional Neural Network |
| MnasNet | MnasNet Convolutional Neural Network |
| AlexNet | AlexNet Convolutional Neural Network |
| VGG | Visual Geometry Group Neural Network |
| ResNet | Residual Neural Network |
| SqueezeNet | SqueezeNet Convolutional Neural Network |
| IT | Information Transmission |
| AC | Accompanying Evolution |
| IE | Individual Ensemble |
References
- Naeem, A.; Anees, T.; Ahmed, K.T.; Naqvi, R.A.; Ahmad, S.; Whangbo, T. Deep learned vectors’ formation using auto-correlation, scaling, and derivations with CNN for complex and huge image retrieval. Complex Intell. Syst. 2023, 9, 1729–1751. [Google Scholar] [CrossRef]
- Nguyen, H.D.; Kim, S.H.; Lee, G.S.; Yang, H.J.; Na, I.S.; Kim, S.H. Facial expression recognition using a temporal ensemble of multi-level convolutional neural networks. IEEE Trans. Affect. Comput. 2019, 13, 226–237. [Google Scholar] [CrossRef]
- Ni, J.; Shen, K.; Chen, Y.; Cao, W.; Yang, S.X. An improved deep network-based scene classification method for self-driving cars. IEEE Trans. Instrum. Meas. 2022, 71, 1–14. [Google Scholar] [CrossRef]
- Abdar, M.; Fahami, M.A.; Rundo, L.; Radeva, P.; Frangi, A.F.; Acharya, U.R.; Khosravi, A.; Lam, H.K.; Jung, A.; Nahavandi, S. Hercules: Deep hierarchical attentive multilevel fusion model with uncertainty quantification for medical image classification. IEEE Trans. Ind. Inform. 2022, 19, 274–285. [Google Scholar] [CrossRef]
- Ojala, T.; Pietikainen, M.; Maenpaa, T. Multiresolution gray-scale and rotation invariant texture classification with local binary patterns. IEEE Trans. Pattern Anal. Mach. Intell. 2002, 24, 971–987. [Google Scholar] [CrossRef]
- Lowe, D.G. Distinctive image features from scale-invariant keypoints. Int. J. Comput. Vis. 2004, 60, 91–110. [Google Scholar] [CrossRef]
- Dalal, N.; Triggs, B. Histograms of oriented gradients for human detection. In Proceedings of the 2005 IEEE Computer Society Conference on Computer Vision and Pattern Recognition (CVPR’05), San Diego, CA, USA, 20–25 June 2005; Volume 1, pp. 886–893. [Google Scholar]
- Koza, J.R. Genetic programming as a means for programming computers by natural selection. Stat. Comput. 1994, 4, 87–112. [Google Scholar] [CrossRef]
- Qin, M.; Wang, R.; Shi, Z.; Liu, L.; Shi, L. A genetic programming-based scheduling approach for hybrid flow shop with a batch processor and waiting time constraint. IEEE Trans. Autom. Sci. Eng. 2019, 18, 94–105. [Google Scholar] [CrossRef]
- Chen, Q.; Xue, B.; Zhang, M. Genetic programming for instance transfer learning in symbolic regression. IEEE Trans. Cybern. 2020, 52, 25–38. [Google Scholar] [CrossRef] [PubMed]
- Bi, Y.; Xue, B.; Zhang, M. A Gaussian filter-based feature learning approach using genetic programming to image classification. In Proceedings of the AI 2018: Advances in Artificial Intelligence: 31st Australasian Joint Conference, Wellington, New Zealand, 11–14 December 2018; Springer: Berlin/Heidelberg, Germany, 2018; pp. 251–257. [Google Scholar]
- Bi, Y.; Xue, B.; Zhang, M. Genetic Programming for Image Classification: An Automated Approach to Feature Learning; Springer Nature: Cham, Switzerland, 2021; Volume 24. [Google Scholar]
- Wu, M.; Li, M.; He, C.; Chen, H.; Wang, Y.; Li, Z. Facial Expression Recognition Based on Genetic Programming Learning CCA Fusion. In Proceedings of the 2022 5th International Conference on Pattern Recognition and Artificial Intelligence (PRAI), Chengdu, China, 19–21 August 2022; pp. 526–532. [Google Scholar]
- Bi, Y.; Xue, B.; Zhang, M. Genetic programming with image-related operators and a flexible program structure for feature learning in image classification. IEEE Trans. Evol. Comput. 2020, 25, 87–101. [Google Scholar] [CrossRef]
- Yang, L.; He, F.; Dai, L.; Zhang, L. An Automatical And Efficient Image Classification Based On Improved Genetic Programming. In Proceedings of the 2022 IEEE 25th International Conference on Computer Supported Cooperative Work in Design (CSCWD), Hangzhou, China, 4–6 May 2022; pp. 477–483. [Google Scholar]
- Bi, Y.; Xue, B.; Zhang, M. Genetic programming-based discriminative feature learning for low-quality image classification. IEEE Trans. Cybern. 2021, 52, 8272–8285. [Google Scholar] [CrossRef]
- Montana, D.J. Strongly typed genetic programming. Evol. Comput. 1995, 3, 199–230. [Google Scholar] [CrossRef]
- Yang, S.; Zhang, L.; He, L.; Wen, Y. Sparse low-rank component-based representation for face recognition with low-quality images. IEEE Trans. Inf. Forensics Secur. 2018, 14, 251–261. [Google Scholar] [CrossRef]
- Abayomi-Alli, O.O.; Damaševičius, R.; Misra, S.; Maskeliūnas, R. Cassava disease recognition from low-quality images using enhanced data augmentation model and deep learning. Expert Syst. 2021, 38, e12746. [Google Scholar] [CrossRef]
- Gao, Y.; Gao, L.; Li, X. A generative adversarial network based deep learning method for low-quality defect image reconstruction and recognition. IEEE Trans. Ind. Inform. 2020, 17, 3231–3240. [Google Scholar] [CrossRef]
- Yadav, A.K.; Gupta, N.; Khan, A.; Jalal, A.S. Robust face recognition under partial occlusion based on local generic features. Int. J. Cogn. Inform. Nat. Intell. (IJCINI) 2021, 15, 47–57. [Google Scholar] [CrossRef]
- Attarmoghaddam, N.; Li, K.F. An area-efficient FPGA implementation of a real-time multi-class classifier for binary images. IEEE Trans. Circuits Syst. II Express Briefs 2022, 69, 2306–2310. [Google Scholar] [CrossRef]
- Quoc, T.N.; Hoang, V.T. A new local image descriptor based on local and global color features for medicinal plant images classification. In Proceedings of the 2021 International Conference on Decision Aid Sciences and Application (DASA), Virtual, 7–8 December 2021; pp. 409–413. [Google Scholar]
- Wu, X.; Feng, Y.; Xu, H.; Lin, Z.; Chen, T.; Li, S.; Qiu, S.; Liu, Q.; Ma, Y.; Zhang, S. CTransCNN: Combining transformer and CNN in multilabel medical image classification. Knowl.-Based Syst. 2023, 281, 111030. [Google Scholar] [CrossRef]
- Han, Q.; Qian, X.; Xu, H.; Wu, K.; Meng, L.; Qiu, Z.; Weng, T.; Zhou, B.; Gao, X. DM-CNN: Dynamic Multi-scale Convolutional Neural Network with uncertainty quantification for medical image classification. Comput. Biol. Med. 2023, 168, 107758. [Google Scholar] [CrossRef]
- Shi, C.; Wu, H.; Wang, L. CEGAT: A CNN and enhanced-GAT based on key sample selection strategy for hyperspectral image classification. Neural Netw. 2023, 168, 105–122. [Google Scholar] [CrossRef]
- Atkins, D.; Neshatian, K.; Zhang, M. A domain independent genetic programming approach to automatic feature extraction for image classification. In Proceedings of the 2011 IEEE Congress of Evolutionary Computation (CEC), New Orleans, LA, USA, 5–8 June 2011; pp. 238–245. [Google Scholar]
- Evans, B.; Al-Sahaf, H.; Xue, B.; Zhang, M. Evolutionary deep learning: A genetic programming approach to image classification. In Proceedings of the 2018 IEEE Congress on Evolutionary Computation (CEC), Rio de Janeiro, Brazil, 8–13 July 2018; pp. 1–6. [Google Scholar]
- Bi, Y.; Zhang, M.; Xue, B. An automatic region detection and processing approach in genetic programming for binary image classification. In Proceedings of the 2017 International Conference on Image and Vision Computing New Zealand (IVCNZ), Christchurch, New Zealand, 4–6 December 2017; pp. 1–6. [Google Scholar]
- Shao, L.; Liu, L.; Li, X. Feature learning for image classification via multiobjective genetic programming. IEEE Trans. Neural Netw. Learn. Syst. 2013, 25, 1359–1371. [Google Scholar] [CrossRef]
- Bi, Y.; Xue, B.; Zhang, M. An effective feature learning approach using genetic programming with image descriptors for image classification [research frontier]. IEEE Comput. Intell. Mag. 2020, 15, 65–77. [Google Scholar] [CrossRef]
- Yan, Z.; Bi, Y.; Xue, B.; Zhang, M. Automatically extracting features using genetic programming for low-quality fish image classification. In Proceedings of the 2021 IEEE Congress on Evolutionary Computation (CEC), Krakow, Poland, 28 June–1 July 2021; pp. 2015–2022. [Google Scholar]
- Fan, Q.; Bi, Y.; Xue, B.; Zhang, M. Genetic programming for image classification: A new program representation with flexible feature reuse. IEEE Trans. Evol. Comput. 2023, 27, 460–474. [Google Scholar] [CrossRef]
- Bi, Y.; Xue, B.; Zhang, M. Genetic programming with a new representation to automatically learn features and evolve ensembles for image classification. IEEE Trans. Cybern. 2020, 51, 1769–1783. [Google Scholar] [CrossRef] [PubMed]
- Price, S.R.; Anderson, D.T.; Price, S.R. Goofed: Extracting advanced features for image classification via improved genetic programming. In Proceedings of the 2019 IEEE Congress on Evolutionary Computation (CEC), Wellington, New Zealand, 10–13 June 2019; pp. 1596–1603. [Google Scholar]
- Fan, Q.; Bi, Y.; Xue, B.; Zhang, M. Genetic programming for feature extraction and construction in image classification. Appl. Soft Comput. 2022, 118, 108509. [Google Scholar] [CrossRef]
- Vedaldi, A.; Fulkerson, B. VLFeat: An open and portable library of computer vision algorithms. In Proceedings of the 18th ACM international conference on Multimedia, Firenze, Italy, 25–29 October 2010; pp. 1469–1472. [Google Scholar]
- Thomaz, C.E. Fei face database. FEI Face DatabaseAvailable 2012, 11, 46–57. [Google Scholar]
- Lyons, M.; Akamatsu, S.; Kamachi, M.; Gyoba, J. Coding facial expressions with gabor wavelets. In Proceedings of the Third IEEE International Conference on Automatic Face and Gesture Recognition, Nara, Japan, 14–16 April 1998; pp. 200–205. [Google Scholar]
- Mallikarjuna, P.; Targhi, A.T.; Fritz, M.; Hayman, E.; Caputo, B.; Eklundh, J.O. The kth-tips2 database. Comput. Vis. Act. Percept. Lab. Stock. Swed. 2006, 11, 12. [Google Scholar]
- Fei-Fei, L.; Fergus, R.; Perona, P. Learning generative visual models from few training examples: An incremental bayesian approach tested on 101 object categories. In Proceedings of the 2004 Conference on Computer Vision and Pattern Recognition Workshop, Washington, DC, USA, 27 June–2 July 2004; p. 178. [Google Scholar]
- Samaria, F.S.; Harter, A.C. Parameterisation of a stochastic model for human face identification. In Proceedings of the 1994 IEEE Workshop on Applications of Computer Vision, Sarasota, FL, USA, 5–7 December 1994; pp. 138–142. [Google Scholar]
- Lee, G.; Gommers, R.; Waselewski, F.; Wohlfahrt, K.; O’Leary, A. PyWavelets: A Python package for wavelet analysis. J. Open Source Softw. 2019, 4, 1237. [Google Scholar] [CrossRef]
- Tao, D.; Li, X.; Wu, X.; Maybank, S.J. General tensor discriminant analysis and gabor features for gait recognition. IEEE Trans. Pattern Anal. Mach. Intell. 2007, 29, 1700–1715. [Google Scholar] [CrossRef]
- LeCun, Y.; Bottou, L.; Bengio, Y.; Haffner, P. Gradient-based learning applied to document recognition. Proc. IEEE 1998, 86, 2278–2324. [Google Scholar] [CrossRef]
- Deng, J.; Dong, W.; Socher, R.; Li, L.J.; Li, K.; Fei-Fei, L. Imagenet: A large-scale hierarchical image database. In Proceedings of the 2009 IEEE Conference on Computer Vision and Pattern Recognition, Miami, FL, USA, 20–25 June 2009; pp. 248–255. [Google Scholar]
- He, K.; Zhang, X.; Ren, S.; Sun, J. Deep residual learning for image recognition. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Las Vegas, NV, USA, 27–30 June 2016; pp. 770–778. [Google Scholar]
- Simonyan, K.; Zisserman, A. Very deep convolutional networks for large-scale image recognition. arXiv 2014, arXiv:1409.1556. [Google Scholar]
- Krizhevsky, A.; Sutskever, I.; Hinton, G.E. Imagenet classification with deep convolutional neural networks. Adv. Neural Inf. Process. Syst. 2012, 25. [Google Scholar] [CrossRef]
- Tan, M.; Chen, B.; Pang, R.; Vasudevan, V.; Sandler, M.; Howard, A.; Le, Q.V. Mnasnet: Platform-aware neural architecture search for mobile. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Long Beach, CA, USA, 15–20 June 2019; pp. 2820–2828. [Google Scholar]
- Iandola, F.N.; Han, S.; Moskewicz, M.W.; Ashraf, K.; Dally, W.J.; Keutzer, K. SqueezeNet: AlexNet-level accuracy with 50x fewer parameters and< 0.5 MB model size. arXiv 2016, arXiv:1602.07360. [Google Scholar]
- Fortin, F.A.; De Rainville, F.M.; Gardner, M.A.G.; Parizeau, M.; Gagné, C. DEAP: Evolutionary algorithms made easy. J. Mach. Learn. Res. 2012, 13, 2171–2175. [Google Scholar]
- Pedregosa, F.; Varoquaux, G.; Gramfort, A.; Michel, V.; Thirion, B.; Grisel, O.; Blondel, M.; Prettenhofer, P.; Weiss, R.; Dubourg, V.; et al. Scikit-learn: Machine learning in Python. J. Mach. Learn. Res. 2011, 12, 2825–2830. [Google Scholar]
- Paszke, A.; Gross, S.; Massa, F.; Lerer, A.; Bradbury, J.; Chanan, G.; Killeen, T.; Lin, Z.; Gimelshein, N.; Antiga, L.; et al. Pytorch: An imperative style, high-performance deep learning library. Adv. Neural Inf. Process. Syst. 2019, 32. [Google Scholar]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Yang et al. [18] proposed a new method for low-quality image face recognition, named Sparse Low-Rank Component-Based Representation (SLCR). This method effectively describes the features of low-quality facial samples by constructing a new dictionary and uses the minimum category reconstruction residual as the recognition rule. Experimental results show that SLCR outperforms other sparse representation-based methods in low-quality image face recognition. |
| Abayomi-Alli et al. [19] proposed a new data augmentation method that uses the convolution of Chebyshev orthogonal functions with probability distribution functions (PDFs). Experiments conducted on a degraded cassava leaf disease dataset demonstrated that this method effectively improved the accuracy of the enhanced MobileNetV2 network in identifying cassava leaf diseases. |
| Gao et al. [20] proposed a new method based on Generative Adversarial Networks (GANs), specifically designed for the recognition of degraded defective images. This method reconstructs degraded images using GAN technology and utilizes the VGG16 network for recognition. Experimental results indicate that this method significantly improves accuracy compared with other methods. |
| Yadav et al. [21] developed a face recognition method for partially occluded scenarios, combining SIFT and MB-LBP techniques to utilize Local Generic Features and robust kernel classification. Tests on the AR database demonstrated its superior performance over existing technologies. |
| Attarmoghaddam et al. [22] developed a binary image multiclass classifier for embedded systems, combining HOG feature extraction with SVM classification. The integration of two binarization steps in HOG improves processing speed and resource efficiency without compromising accuracy. |
| Quoc et al. [23] introduced a novel approach combining SIFT, BoW, HOG, and Hu moments, integrating these extracted features with machine learning algorithms like SVM and RF for identifying different plant species from complex backgrounds. |
| Wu et al. [24] developed CTransCNN, a hybrid multilabel medical image classification model combining CNN and Transformer, enhanced by MMAEF, MBR, and IIM modules, showing excellent performance and generalization in tests. |
| Han et al. [25] developed DM-CNN, a new CNN model for medical image diagnosis, improving feature extraction and addressing uncertainty quantification, showing superior performance in various medical tests. |
| Shi et al. [26] proposed CEGAT, a fusion network for hyperspectral image classification, integrating CNN with an enhanced graph attention network, using spectral discrimination and attention modules, and a key sample selection strategy, achieving superior performance with limited labels. |
| Atkins et al. [27] designed a three-layer structure (classification, aggregation, and filtering layers) where the order of the layers is fixed, but the number of functions within each layer is not limited, allowing for varying depths in each layer. Experiments have shown that this structure has comparable performance to GP-based classifiers with domain knowledge. |
| Evans et al. [28] proposed an image classification method that combines useful operators of CNNs, such as convolution and pooling, with GP. This approach fully utilizes the flexibility of GP, enabling the learning of convolution filter coefficients and the extraction of features from useful regions of images to construct classifiers. |
| Bi et al. [29] proposed an automatic region detection method aimed at identifying and extracting important regions in images. This method not only significantly reduces the dimensionality of image data, thereby saving computational costs, but also automatically extracts and constructs effective features for efficient image classification. |
| Shao et al. [30] developed a new GP-based image classification method that utilizes Multi-Objective Genetic Programming (MOGP) to automatically generate feature descriptors adaptable to various image domains. Tests on multiple datasets have shown that its classification accuracy significantly surpasses that of comparative methods. |
| Bi et al. [31] proposed a new GP-based program structure that automatically and simultaneously extracts both global and local features from original images. The performance of the proposed method is significantly superior to or on par with all comparative methods across four image classification datasets of varying difficulty. |
| Yan et al. [32] proposed a new GP-based method specifically for the classification of low-quality fish images. This method automatically selects image operators to process images and extract features. Its performance on a well-known fish image dataset is significantly better than various benchmark methods. |
| Bi et al. [16] proposed a new GP-based method for low-quality image classification, capable of extracting discriminative features from low-quality images. This method has been tested for performance in various scenarios, including original (clean), blur, low contrast, and noise scenarios. The test results demonstrate that this method excels in classifying low-quality images. |
| Fan et al. [33] designed a new program structure that allows for the flexible reuse of features generated by different nodes. Through this design, a combination of low-level and manual features has been achieved. The new method integrates classification algorithms into the program structure, enabling the automatic selection of suitable classification algorithms during the evolutionary process. |
| Bi et al. [34] integrated the selection and combination of base classifiers into a single tree, ultimately ensemble-classifying with multiple base classifiers, achieving higher generalization performance than a single classifier. |
| Price et al. [35] introduced a unique adaptive mutation method, as well as a new crossover technique to control tree bloat during the evolutionary process, thereby enhancing classification performance. |
| Fan et al. [36] proposed a new mutation operator specifically targeting the control of program tree bloat. This operator dynamically adjusts the size of the program tree during the evolutionary process. Experimental results indicate that the method of dynamically adjusting the size of the program tree effectively enhances classification performance. |
| Terminal | Type | Value Range | Description |
|---|---|---|---|
| Image Data | Array | [0, 1] | N image, each represented as a two-dimensional array, with pixel values normalized to the range [0, 1] |
| Integer | [1, 3] | The standard deviation parameter for Gaussian filtering in Gaussian and GauDeriv functions | |
| Integer | [1, 2] | The standard deviation parameter for Gaussian filtering in the LoG function | |
| , | Integer | [0, 2] | The order of Gaussian derivatives |
| Coordinate | Integer | ([0, W-20], [0, H-20]) | Coordinate of the top-left corner of the selected region, where W and H respectively represent the width and height of each image data |
| Size | Integer | [20, 50] | Size of the width and height of a rectangle region, and size of the side length of a square region |
| K1,K2 | Integer | [2, 10] | The sliding window size required by the downsampling layer functions |
| m | Integer | {0, 1, 2} | Different values represent different manual feature extraction methods |
| i | Float | (0, 1) | Random number, rounded to two decimal places |
| p | Integer | {0, 1} | If i is 1, the manual features generated by the feature construction layer are sent to the feature concatenation layer |
| Function | Input | Output | Description |
|---|---|---|---|
| Roberts | Image Data | Image Data | The Roberts operator used for edge detection |
| Prewitt | Image Data | Image Data | The Prewitt operator used for edge detection |
| Relu | Image Data | Image Data | Rectified Linear Unit function |
| Sqrt | Image Data | Image Data | Take the square root of each pixel in the Image Data |
| Mean | Image Data | Image Data | 3 × 3 Mean Filter |
| Min | Image Data | Image Data | 3 × 3 Min Filter |
| Max | Image Data | Image Data | 3 × 3 Max Filter |
| Med | Image Data | Image Data | 3 × 3 Med Filter |
| Sobel | Image Data | Image Data | Sobel edge detector |
| LoG | Image Data, | Image Data | Laplace operator of the Gaussian filter |
| Abs | Image Data | Image Data | Return the absolute value of the pixel |
| Lap | Image Data | Image Data | Laplace filter |
| Gaussian | Image Data, | Image Data | Gaussian filter |
| GauDeriv | Image Data, , , | Image Data | Gaussian filter of the second derivative |
| Equalize | Image Data | Image Data | Histogram equalization |
| Region_R [12] | Image Data, Coordinate, Size | Region | Extracting rectangular regions from image data |
| Region_S [12] | Image Data, Coordinate, Size | Region | Extracting square regions from image data |
| Min_F | 2 Region | Region | Select the minimum value from corresponding pixel points to achieve image fusion |
| Median_F | 2 Region | Region | Choose the median value from corresponding pixel points to achieve image fusion |
| Mean_F | 2 Region | Region | Calculate the average value of corresponding pixel points to achieve image fusion |
| Max_P | Region, K1, K2 | Tuple1 (Original Region, Downsampled Region) | Perform max pooling on the region |
| Ave_P | Region, K1, K2 | Tuple1 (Original Region, Downsampled Region) | Perform average pooling on the region |
| Bilin_D | Region, K1, K2 | Tuple1 (Original Region, Downsampled Region) | Perform bilinear downsampling on regions |
| Function | Input | Output | Description |
|---|---|---|---|
| Feature_E | Tuple1, m | Tuple2 (Original Region, Concatenated Features, t) | Extracting manual features and pixel features |
| Feature_C | Tuple2, m, i | Tuple2 (Original Region, Constructed Features, Handcrafted Features) | Constructing new features |
| Transmit_F | Tuple2 | Vector | Transmitting feature information to subsequent layers |
| Concat2 | Vector | Vector | Concatenating vectors into a single feature vector |
| SVM | Vector | Label | SVM classification algorithm |
| Dataset | Image Size | Training Set Size | Test Set Size | # Class |
|---|---|---|---|---|
| FEI1 | 180 × 130 | 150 | 50 | 2 |
| FEI2 | 180 × 130 | 150 | 50 | 2 |
| Jaffe | 128 × 128 | 140 | 73 | 7 |
| Flower | 100 × 100 | 113 | 38 | 2 |
| KTH | 100 × 100 | 600 | 210 | 10 |
| ORL | 92 × 112 | 280 | 120 | 40 |
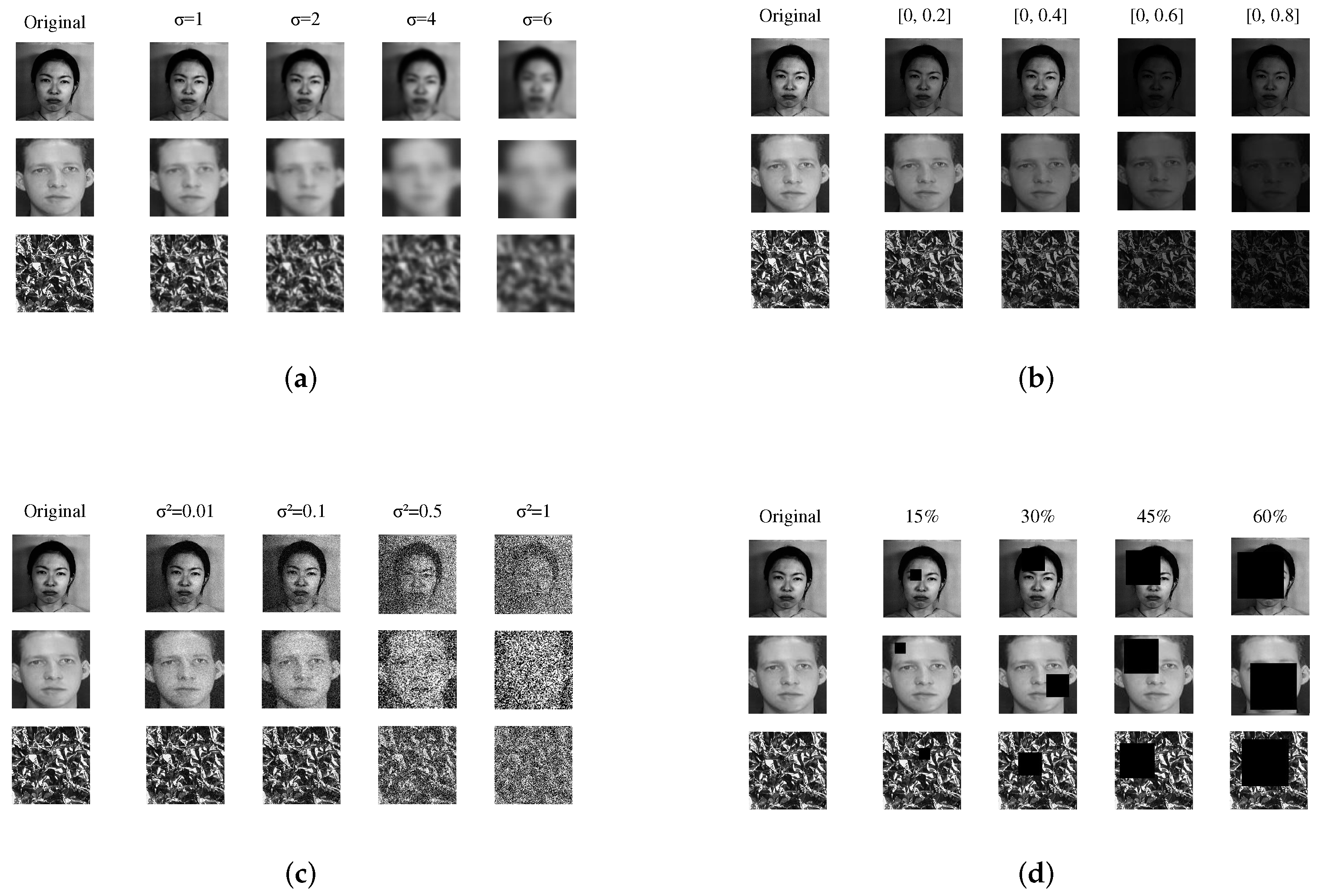
| Degraded | Description | Value |
|---|---|---|
| Blur | Gaussian blur with different standard deviations is applied to each image with a random probability of 25% | [1, 2, 4, 6] |
| Low-Contrast | Each image’s contrast is randomly reduced with a 25% probability | [[0, 0.8], [0, 0.6], [0, 0.4], [0, 0.2]] |
| Noise | Gaussian noise with different variances is randomly added to each image with a 25% probability | [0.01, 0.1, 0.5, 1] |
| Occlusion | Square occlusions of varying sizes are randomly introduced at different positions on each image with a 25% probability | [0.15, 0.30, 0.45, 0.60] |
| Parameter | Value | Parameter | Value |
|---|---|---|---|
| Population size | 250 | Tree depth | 2-11 |
| Generations | 50 | Selection method | Tournament selection |
| Crossover rate | 0.8 | Tournament size | 7 |
| Mutation rate | 0.19 | Initialization method | Ramped half and half |
| Elitism rate | 0.01 |
| Scenarios | Methods | FEI_1 (Mean ± Std) | W-Test | FEI_2 (Mean ± Std) | W-Test | FLOWER (Mean ± Std) | W-Test | JAFFE (Mean ± Std) | W-Test | KTH (Mean ± Std) | W-Test | ORL (Mean ± Std) | W-Test |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Original | SVM + Gabor | 83.86 ± 5.40 | + | 80.26 ± 5.72 | + | 80.52 ± 7.06 | + | 47.90 ± 4.19 | + | 41.15 ± 2.56 | + | 66.02 ± 3.27 | + |
| SVM + Hist | 45.40 ± 7.72 | + | 41.53 ± 5.74 | + | 53.07 ± 6.26 | + | 22.55 ± 3.55 | + | 52.90 ± 3.03 | + | 92.83 ± 2.02 | + | |
| SVM + HOG | 93.40 ± 2.97 | + | 86.86 ± 4.09 | + | 60.61 ± 6.12 | + | 78.94 ± 3.72 | + | 49.52 ± 2.87 | + | 96.19 ± 1.47 | + | |
| SVM + LBP | 67.46 ± 5.53 | + | 68.46 ± 7.45 | + | 67.45 ± 6.53 | + | 23.88 ± 4.87 | + | 88.76 ± 2.70 | + | 92.66 ± 1.42 | + | |
| SVM + SIFT | 89.06 ± 3.99 | + | 90.53 ± 3.85 | + | 84.12 ± 5.71 | + | 77.02 ± 5.65 | + | 80.57 ± 1.99 | + | 99.13 ± 0.94 | = | |
| SVM + DWT | 93.00 ± 3.70 | + | 89.73 ± 4.15 | + | 85.52 ± 5.97 | + | 75.79 ± 5.29 | + | 45.42 ± 2.09 | + | 96.44 ± 1.45 | + | |
| LeNet-5 | 89.87 ± 3.58 | + | 87.07 ± 3.64 | + | 81.84 ± 6.01 | + | 82.51 ± 6.69 | + | 67.70 ± 3.68 | + | 94.97 ± 2.54 | + | |
| CNN-5 | 90.80 ± 3.78 | + | 87.73 ± 5.05 | + | 85.44 ± 4.64 | + | 81.42 ± 5.05 | + | 81.81 ± 2.88 | + | 97.39 ± 1.36 | + | |
| MnasNet | 87.86 ± 4.06 | + | 85.86 ± 4.25 | + | 91.57 ± 4.67 | = | 75.79 ± 5.42 | + | 96.95 ± 1.19 | - | 96.08 ± 2.47 | + | |
| VGG | 81.60 ± 5.82 | + | 79.40 ± 3.93 | + | 92.89 ± 3.33 | - | 72.42 ± 5.34 | + | 97.82 ± 0.98 | - | 95.52 ± 1.76 | + | |
| AlexNet | 88.60 ± 4.26 | + | 86.40 ± 3.40 | + | 88.77 ± 4.23 | + | 78.67 ± 6.23 | + | 95.77 ± 1.22 | - | 96.25 ± 1.66 | + | |
| ResNet | 89.86 ± 3.93 | + | 88.80 ± 2.94 | + | 94.47 ± 3.28 | - | 78.40 ± 5.13 | + | 98.15 ± 0.84 | - | 97.88 ± 1.09 | + | |
| SqueezeNet | 85.00 ± 4.37 | + | 84.26 ± 4.46 | + | 83.15 ± 4.23 | + | 74.29 ± 5.12 | + | 95.90 ± 1.12 | - | 95.19 ± 2.13 | + | |
| EFLGP | 93.06 ± 3.95 | + | 88.86 ± 4.65 | + | 85.26 ± 4.06 | + | 83.42 ± 5.20 | + | 78.25 ± 5.89 | + | 95.61 ± 2.74 | + | |
| ITACIE-GP | 95.06 ± 2.51 | 93.93 ± 3.48 | 90.96 ± 4.74 | 88.58 ± 4.26 | 93.25 ± 1.88 | 99.05 ± 0.74 | |||||||
| +/=/- | 14/0/0 | 14/0/0 | 11/1/2 | 14/0/0 | 9/0/5 | 13/1/0 |
| Scenarios | Methods | FEI_1 (Mean ± Std) | W-Test | FEI_2 (Mean ± Std) | W-Test | FLOWER (Mean ± Std) | W-Test | JAFFE (Mean ± Std) | W-Test | KTH (Mean ± Std) | W-Test | ORL (Mean ± Std) | W-Test |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Blur | SVM + Gabor | 80.46 ± 5.05 | + | 80.20 ± 5.39 | + | 81.40 ± 5.16 | + | 45.57 ± 4.20 | + | 40.80 ± 3.61 | + | 72.47 ± 4.48 | + |
| SVM + Hist | 43.73 ± 7.21 | + | 41.73 ± 6.74 | + | 54.03 ± 6.43 | + | 18.86 ± 4.76 | + | 40.95 ± 3.12 | + | 73.80 ± 3.21 | + | |
| SVM + HOG | 90.06 ± 3.98 | + | 84.46 ± 5.00 | + | 60.96 ± 6.55 | + | 53.37 ± 5.58 | + | 42.28 ± 2.61 | + | 89.05 ± 2.69 | + | |
| SVM + LBP | 58.73 ± 6.63 | + | 64.53 ± 5.50 | + | 74.12 ± 6.14 | + | 25.66 ± 4.46 | + | 75.88 ± 2.55 | + | 76.80 ± 3.83 | + | |
| SVM + SIFT | 88.20 ± 3.87 | + | 87.73 ± 5.08 | + | 83.07 ± 6.61 | + | 65.97 ± 5.01 | + | 72.44 ± 2.58 | + | 94.94 ± 1.82 | + | |
| SVM + DWT | 92.06 ± 3.34 | + | 88.26 ± 4.12 | + | 84.38 ± 5.21 | + | 71.32 ± 5.27 | + | 44.39 ± 6.17 | + | 96.44 ± 1.51 | + | |
| LeNet-5 | 89.27 ± 5.30 | + | 89.93 ± 4.75 | + | 83.16 ± 7.08 | + | 75.84 ± 5.66 | + | 60.41 ± 4.54 | + | 89.93 ± 4.75 | + | |
| CNN-5 | 89.07 ± 3.99 | + | 87.67 ± 4.41 | + | 86.75 ± 5.50 | + | 71.60 ± 4.60 | + | 69.14 ± 2.45 | + | 97.50 ± 1.60 | = | |
| MnasNet | 77.06 ± 5.13 | + | 74.33 ± 4.76 | + | 86.84 ± 4.45 | = | 47.76 ± 5.04 | + | 85.38 ± 2.62 | = | 69.97 ± 3.47 | + | |
| VGG | 74.06 ± 6.20 | + | 71.60 ± 8.39 | + | 88.50 ± 5.06 | = | 46.94 ± 5.18 | + | 81.98 ± 2.34 | + | 73.00 ± 3.87 | + | |
| AlexNet | 80.73 ± 4.82 | + | 74.80 ± 4.83 | + | 83.42 ± 5.09 | + | 54.52 ± 5.98 | + | 82.04 ± 2.10 | + | 72.25 ± 3.65 | + | |
| ResNet | 79.66 ± 4.79 | + | 80.73 ± 3.74 | + | 85.96 ± 4.91 | + | 55.06 ± 5.98 | + | 90.52 ± 1.84 | - | 82.61 ± 3.70 | + | |
| SqueezeNet | 78.66 ± 3.87 | + | 77.93 ± 4.39 | + | 85.00 ± 5.73 | + | 54.52 ± 5.98 | + | 83.38 ± 2.45 | + | 75.72 ± 2.54 | + | |
| EFLGP | 91.73 ± 3.99 | + | 89.60 ± 5.44 | + | 82.89 ± 6.28 | + | 76.29 ± 5.73 | + | 58.85 ± 7.64 | + | 88.55 ± 4.10 | + | |
| ITACIE-GP | 93.93 ± 3.48 | 92.53 ± 4.55 | 87.89 ± 5.33 | 80.45 ± 5.36 | 84.90 ± 2.72 | 97.30 ± 1.32 | |||||||
| +/=/- | 14/0/0 | 14/0/0 | 12/2/0 | 14/0/0 | 13/1/1 | 13/1/0 |
| Scenarios | Methods | FEI_1 (Mean ± Std) | W-Test | FEI_2 (Mean ± Std) | W-Test | FLOWER (Mean ± Std) | W-Test | JAFFE (Mean ± Std) | W-Test | KTH (Mean ± Std) | W-Test | ORL (Mean ± Std) | W-Test |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Low-contrast | SVM + Gabor | 72.33 ± 6.78 | + | 78.20 ± 7.50 | + | 73.68 ± 7.24 | + | 34.79 ± 5.58 | + | 28.27 ± 2.85 | + | 45.08 ± 3.56 | + |
| SVM + Hist | 48.86 ± 6.27 | + | 48.13 ± 4.60 | + | 49.91 ± 5.84 | + | 14.29 ± 3.51 | + | 15.66 ± 2.25 | + | 7.83 ± 2.19 | + | |
| SVM + HOG | 88.06 ± 3.50 | + | 88.13 ± 4.13 | + | 55.61 ± 7.68 | + | 50.45 ± 5.71 | + | 31.33 ± 2.79 | + | 85.75 ± 3.31 | + | |
| SVM + LBP | 56.40 ± 5.83 | + | 62.86 ± 5.79 | + | 76.93 ± 5.72 | + | 21.09 ± 3.57 | + | 73.03 ± 2.88 | + | 82.75 ± 2.39 | + | |
| SVM + SIFT | 85.06 ± 4.38 | + | 84.26 ± 3.47 | + | 82.89 ± 7.17 | + | 74.33 ± 5.82 | + | 76.57 ± 2.55 | + | 97.22 ± 1.35 | = | |
| SVM + DWT | 75.26 ± 7.41 | + | 76.66 ± 8.05 | + | 76.75 ± 7.34 | + | 54.47 ± 5.53 | + | 29.46 ± 7.10 | + | 75.97 ± 7.60 | + | |
| LeNet-5 | 82.33 ± 8.53 | + | 84.47 ± 5.97 | + | 82.81 ± 6.33 | + | 61.83 ± 11.34 | + | 51.59 ± 3.76 | + | 76.87 ± 9.00 | + | |
| CNN-5 | 80.53 ± 4.90 | + | 80.27 ± 5.13 | + | 81.32 ± 5.82 | + | 52.65 ± 7.50 | + | 62.52 ± 3.94 | + | 88.97 ± 2.89 | + | |
| MnasNet | 60.40 ± 5.17 | + | 59.40 ± 7.00 | + | 70.61 ± 7.56 | + | 27.12 ± 4.75 | + | 64.28 ± 2.57 | + | 50.22 ± 4.17 | + | |
| VGG | 59.66 ± 6.02 | + | 60.66 ± 5.52 | + | 69.47 ± 5.24 | + | 33.37 ± 4.19 | + | 59.50 ± 3.12 | + | 51.97 ± 4.47 | + | |
| AlexNet | 64.53 ± 6.61 | + | 62.13 ± 7.88 | + | 74.91 ± 8.42 | + | 31.59 ± 5.59 | + | 66.79 ± 2.96 | + | 47.38 ± 3.68 | + | |
| ResNet | 58.00 ± 4.92 | + | 59.00 ± 7.24 | + | 79.91 ± 4.87 | + | 41.00 ± 4.70 | + | 72.49 ± 2.34 | + | 68.13 ± 5.22 | + | |
| SqueezeNet | 65.66 ± 7.06 | + | 64.93 ± 5.94 | + | 75.00 ± 4.33 | + | 31.59 ± 5.59 | + | 62.50 ± 3.91 | + | 60.13 ± 4.25 | + | |
| EFLGP | 90.93 ± 4.47 | = | 88.66 ± 3.37 | = | 81.22 ± 6.24 | + | 74.70 ± 6.52 | + | 64.65 ± 6.98 | + | 88.55 ± 4.10 | + | |
| ITACIE-GP | 91.33 ± 3.66 | 90.0 ± 3.42 | 86.92 ± 4.83 | 83.11 ± 4.80 | 86.38 ± 1.90 | 96.08 ± 1.92 | |||||||
| +/=/- | 13/1/0 | 13/1/0 | 14/0/0 | 14/0/0 | 14/0/0 | 13/1/0 |
| Scenarios | Methods | FEI_1 (Mean ± Std) | W-Test | FEI_2 (Mean ± Std) | W-Test | FLOWER (Mean ± Std) | W-Test | JAFFE (Mean ± Std) | W-Test | KTH (Mean ± Std) | W-Test | ORL (Mean ± Std) | W-Test |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Noise | SVM + Gabor | 72.33 ± 5.80 | + | 68.93 ± 7.38 | + | 79.64 ± 6.69 | + | 30.09 ± 4.61 | + | 28.30 ± 3.06 | + | 28.33 ± 2.86 | + |
| SVM + Hist | 53.40 ± 6.08 | + | 52.13 ± 5.91 | + | 54.56 ± 6.62 | + | 11.78 ± 3.59 | + | 33.90 ± 2.59 | + | 17.08 ± 2.68 | + | |
| SVM + HOG | 47.13 ± 6.27 | + | 53.06 ± 6.34 | + | 55.17 ± 8.10 | + | 24.43 ± 3.67 | + | 21.03 ± 2.14 | + | 22.63 ± 3.14 | + | |
| SVM + LBP | 50.20 ± 6.58 | + | 48.40 ± 6.41 | + | 62.89 ± 7.29 | + | 15.38 ± 4.28 | + | 39.71 ± 2.74 | + | 6.52 ± 2.14 | + | |
| SVM + SIFT | 76.00 ± 4.98 | + | 72.26 ± 5.77 | + | 81.14 ± 6.98 | + | 44.52 ± 6.13 | + | 44.09 ± 2.98 | + | 40.25 ± 3.79 | + | |
| SVM + DWT | 88.93 ± 3.00 | + | 84.53 ± 4.54 | + | 80.96 ± 7.49 | + | 47.17 ± 5.63 | + | 31.60 ± 2.51 | + | 70.05 ± 3.96 | + | |
| LeNet-5 | 85.67 ± 6.83 | + | 76.87 ± 9.00 | + | 83.77 ± 6.00 | + | 49.31 ± 4.70 | + | 31.81 ± 2.80 | + | 76.87 ± 9.00 | + | |
| CNN-5 | 84.27 ± 6.49 | + | 81.40 ± 4.98 | + | 82.46 ± 6.77 | + | 45.89 ± 6.06 | + | 50.33 ± 3.54 | = | 79.47 ± 6.62 | + | |
| MnasNet | 61.93 ± 7.32 | + | 57.53 ± 5.67 | + | 76.75 ± 7.65 | + | 19.95 ± 4.98 | + | 48.46 ± 2.39 | + | 16.36 ± 2.97 | + | |
| VGG | 53.26 ± 7.07 | + | 54.46 ± 6.42 | + | 75.70 ± 4.54 | + | 19.86 ± 4.62 | + | 47.84 ± 2.13 | + | 16.19 ± 2.22 | + | |
| AlexNet | 51.06 ± 6.54 | + | 55.53 ± 5.76 | + | 79.73 ± 5.65 | + | 24.79 ± 4.81 | + | 46.41 ± 2.89 | + | 11.83 ± 2.33 | + | |
| ResNet | 62.06 ± 4.80 | + | 57.00 ± 5.65 | + | 80.87 ± 6.15 | + | 26.84 ± 4.41 | + | 51.61 ± 2.49 | = | 24.86 ± 3.40 | + | |
| SqueezeNet | 58.60 ± 6.71 | + | 57.60 ± 5.47 | + | 77.89 ± 5.28 | + | 24.79 ± 4.81 | + | 48.30 ± 3.24 | + | 17.11 ± 3.31 | + | |
| EFLGP | 91.06 ± 4.24 | + | 86.20 ± 4.74 | + | 82.10 ± 5.83 | + | 62.82 ± 6.55 | + | 36.66 ± 4.15 | + | 76.05 ± 9.83 | + | |
| ITACIE-GP | 93.00 ± 2.40 | 88.33 ± 3.34 | 85.78 ± 4.68 | 67.85 ± 4.79 | 51.77 ± 3.94 | 89.55 ± 4.05 | |||||||
| +/=/- | 14/0/0 | 14/0/0 | 14/0/0 | 14/0/0 | 12/2/0 | 14/0/0 |
| Scenarios | Methods | FEI_1 (Mean ± Std) | W-Test | FEI_2 (Mean ± Std) | W-Test | FLOWER (Mean ± Std) | W-Test | JAFFE (Mean ± Std) | W-Test | KTH (Mean ± Std) | W-Test | ORL (Mean ± Std) | W-Test |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Occlusion | SVM + Gabor | 56.20 ± 6.24 | + | 60.33 ± 6.46 | + | 59.12 ± 6.55 | + | 23.06 ± 4.83 | + | 26.78 ± 2.64 | + | 22.47 ± 3.12 | + |
| SVM + Hist | 47.07 ± 6.38 | + | 43.13 ± 6.12 | + | 51.93 ± 7.15 | + | 18.13 ± 4.70 | + | 49.76 ± 2.78 | + | 86.89 ± 2.37 | + | |
| SVM + HOG | 68.60 ± 4.40 | + | 63.13 ± 5.98 | + | 54.30 ± 5.96 | + | 21.28 ± 4.67 | + | 30.97 ± 3.37 | + | 63.67 ± 3.66 | + | |
| SVM + LBP | 62.27 ± 6.25 | + | 61.13 ± 6.64 | + | 66.32 ± 6.42 | + | 16.76 ± 3.56 | + | 84.94 ± 2.29 | + | 80.44 ± 4.17 | + | |
| SVM + SIFT | 70.80 ± 6.38 | + | 64.93 ± 5.43 | + | 74.39 ± 7.05 | + | 29.91 ± 4.27 | + | 59.92 ± 2.74 | + | 85.47 ± 3.12 | + | |
| SVM + DWT | 74.87 ± 4.19 | + | 66.40 ± 6.59 | + | 68.51 ± 7.36 | + | 42.74 ± 4.54 | + | 28.44 ± 3.02 | + | 79.50 ± 2.40 | + | |
| LeNet-5 | 64.60 ± 11.02 | + | 62.93 ± 10.69 | + | 64.74 ± 7.40 | + | 32.97 ± 4.36 | + | 33.41 ± 3.90 | + | 67.69 ± 7.06 | + | |
| CNN-5 | 66.40 ± 6.70 | + | 61.60 ± 7.27 | + | 66.66 ± 8.63 | + | 36.80 ± 4.52 | + | 58.49 ± 3.60 | + | 87.02 ± 3.21 | + | |
| MnasNet | 76.73 ± 5.83 | + | 74.33 ± 6.45 | + | 87.28 ± 4.60 | - | 21.19 ± 3.51 | + | 83.25 ± 2.37 | + | 64.17 ± 4.92 | + | |
| VGG | 76.07 ± 4.83 | + | 65.53 ± 5.77 | + | 78.16 ± 5.77 | + | 24.61 ± 4.22 | + | 84.63 ± 2.44 | + | 52.17 ± 4.03 | + | |
| AlexNet | 77.40 ± 5.27 | + | 68.13 ± 5.63 | + | 77.11 ± 7.51 | = | 29.36 ± 4.30 | + | 69.05 ± 2.75 | + | 38.61 ± 2.82 | + | |
| ResNet | 79.07 ± 3.60 | + | 71.33 ± 5.02 | + | 86.05 ± 5.81 | - | 23.65 ± 4.27 | + | 85.92 ± 2.45 | = | 69.33 ± 4.66 | + | |
| SqueezeNet | 79.00 ± 4.52 | + | 66.67 ± 6.48 | + | 75.44 ± 7.14 | + | 25.43 ± 4.06 | + | 72.22 ± 3.45 | + | 61.81 ± 3.45 | + | |
| EFLGP | 83.26 ± 4.77 | + | 74.26 ± 5.05 | + | 62.19 ± 8.70 | + | 41.00 ± 6.98 | + | 60.39 ± 9.19 | + | 80.05 ± 7.72 | + | |
| ITACIE-GP | 90.13 ± 3.82 | 84.00 ± 4.28 | 77.28 ± 6.56 | 50.13 ± 4.80 | 86.23 ± 2.45 | 97.47 ± 1.43 | |||||||
| +/=/- | 14/0/0 | 14/0/0 | 11/1/2 | 14/0/0 | 13/1/0 | 14/0/0 |
| ITACIE-GP | ACIE-GP | ITIE-GP | ITAC-GP | |
|---|---|---|---|---|
| Dataset | Mean ± Std | Mean ± Std | Mean ± Std | Mean ± Std |
| FEI_1 | 94.40 ± 2.65 | 92.40 ± 2.33+ | 94.40 ± 2.65= | 93.60 ± 2.33+ |
| FEI_1_Blur | 93.20 ± 2.40 | 90.80 ± 1.60+ | 92.00 ± 1.26+ | 93.20 ± 3.25+ |
| FEI_1_Low | 92.00 ± 1.79 | 87.60 ± 4.45+ | 91.20 ± 4.31+ | 90.80 ± 2.71+ |
| FEI_1_Noise | 91.60 ± 3.44 | 89.60 ± 4.45+ | 89.60 ± 4.63+ | 91.60 ± 2.71= |
| JAFFE | 91.23 ± 1.86 | 85.75 ± 3.63+ | 89.04 ± 5.20+ | 90.41 ± 2.29+ |
| JAFFE_Blur | 84.11 ± 2.39 | 82.47 ± 4.62+ | 82.19 ± 2.74+ | 83.56 ± 3.00+ |
| JAFFE_Low | 84.93 ± 5.27 | 82.19 ± 4.67+ | 84.66 ± 5.44+ | 84.66 ± 5.44+ |
| JAFFE_Noise | 67.12 ± 3.87 | 63.84 ± 6.46+ | 66.30 ± 3.93+ | 67.12 ± 3.87= |
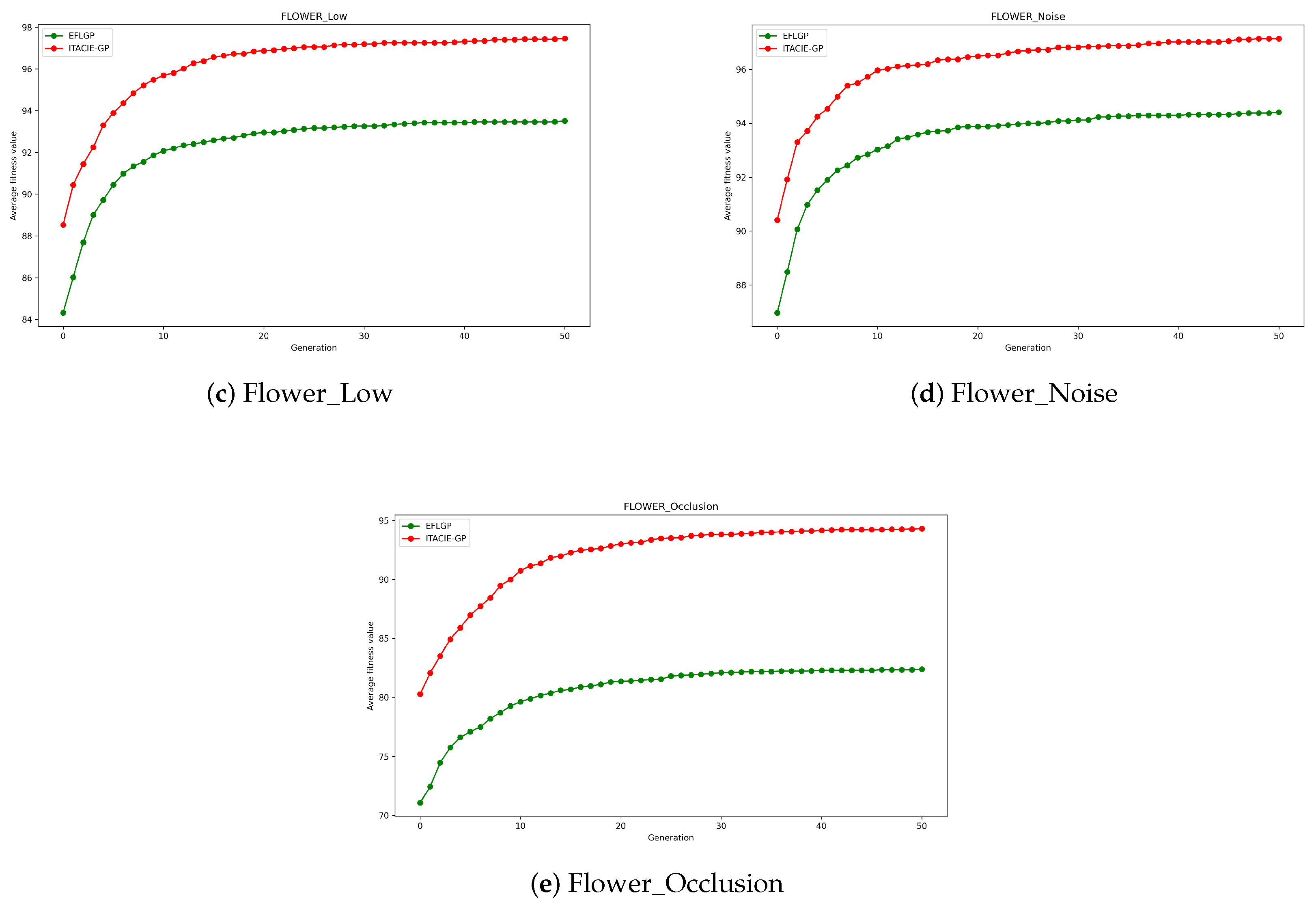
| FLOWER | 87.89 ± 4.88 | 85.96 ± 3.28+ | 86.32 ± 5.86+ | 86.84 ± 4.99+ |
| FLOWER_Blur | 90.00 ± 3.87 | 85.26 ± 3.94+ | 87.37 ± 1.97+ | 89.47 ± 4.40+ |
| FLOWER_Low | 86.84 ± 3.33 | 85.26 ± 4.88+ | 78.95 ± 2.35+ | 87.37 ± 3.49- |
| FLOWER_Noise | 84.74 ± 4.53 | 83.68 ± 4.82+ | 83.68 ± 1.97+ | 84.74 ± 4.53= |
| ORL | 99.00 ± 0.33 | 96.83 ± 1.62+ | 98.67 ± 0.67+ | 99.00 ± 0.62+ |
| ORL_Blur | 90.00 ± 3.87 | 85.96 ± 3.28+ | 87.37 ± 1.97+ | 89.47 ± 4.40+ |
| ORL_Low | 96.83 ± 0.97 | 95.67 ± 1.93+ | 95.67 ± 1.78+ | 97.00 ± 1.00- |
| ORL_Noise | 91.83 ± 2.26 | 88.83 ± 2.51+ | 89.83 ± 3.78+ | 91.83 ± 2.26= |
| overall | 41+,5=,2- |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sun, Y.; Zhang, Z. Automatic Feature Construction-Based Genetic Programming for Degraded Image Classification. Appl. Sci. 2024, 14, 1613. https://doi.org/10.3390/app14041613
Sun Y, Zhang Z. Automatic Feature Construction-Based Genetic Programming for Degraded Image Classification. Applied Sciences. 2024; 14(4):1613. https://doi.org/10.3390/app14041613
Chicago/Turabian StyleSun, Yu, and Zhiqiang Zhang. 2024. "Automatic Feature Construction-Based Genetic Programming for Degraded Image Classification" Applied Sciences 14, no. 4: 1613. https://doi.org/10.3390/app14041613
APA StyleSun, Y., & Zhang, Z. (2024). Automatic Feature Construction-Based Genetic Programming for Degraded Image Classification. Applied Sciences, 14(4), 1613. https://doi.org/10.3390/app14041613