
Mesh Stiffness and Dynamic Modeling and Analysis of Modified Straight Bevel Gears

Abstract
1. Introduction
2. Time-Varying Meshing Stiffness Calculation Model
2.1. The TCA Environment
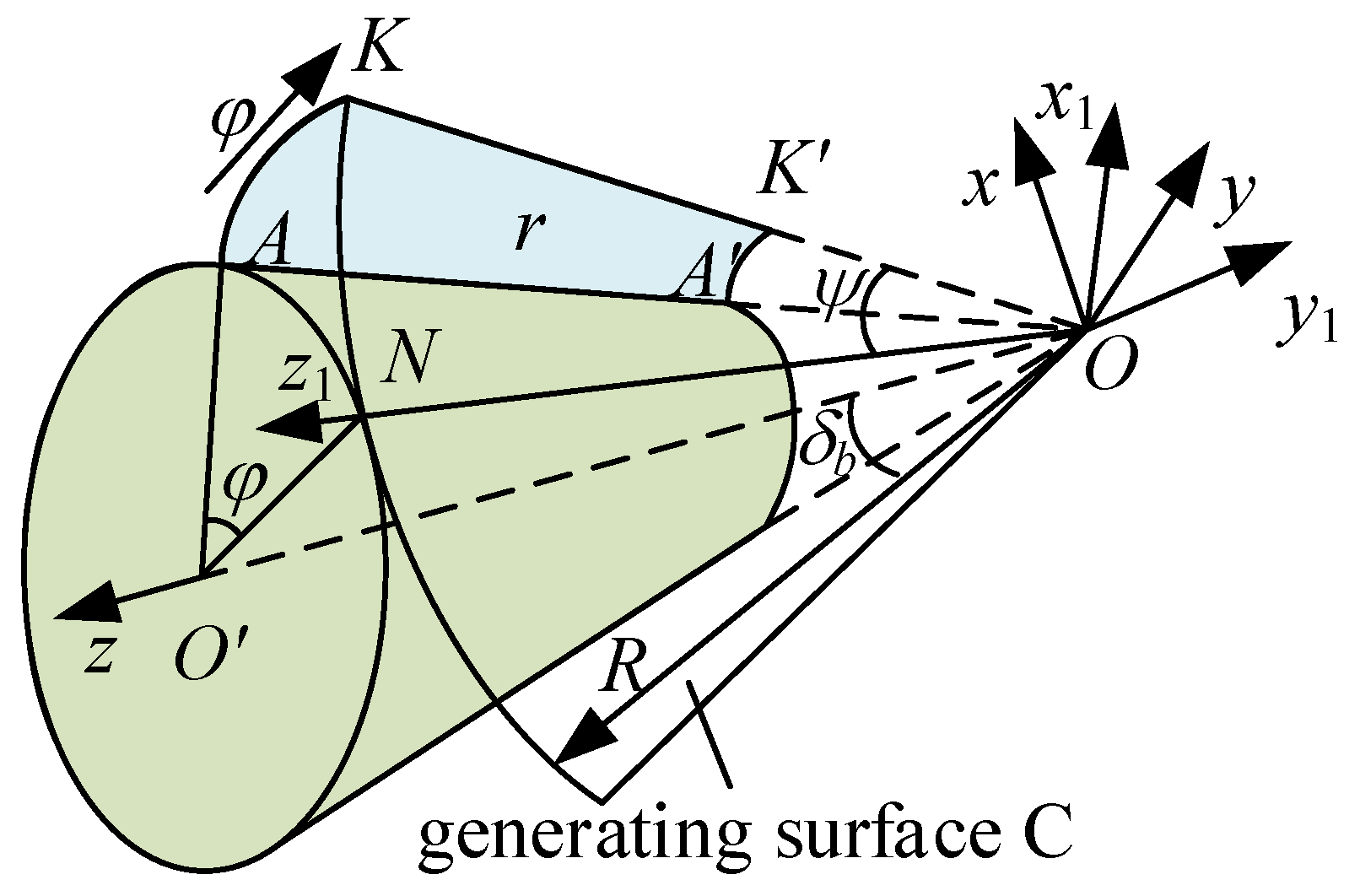
2.1.1. The Principle of Straight Bevel Gear Tooth Surface Generation
2.1.2. Contact Point Vector and Normal Vector
2.2. Standard Straight Bevel Gear
2.3. Lead Crown Relief
2.4. Tooth Profile Modification
2.5. Comprehensive Modification
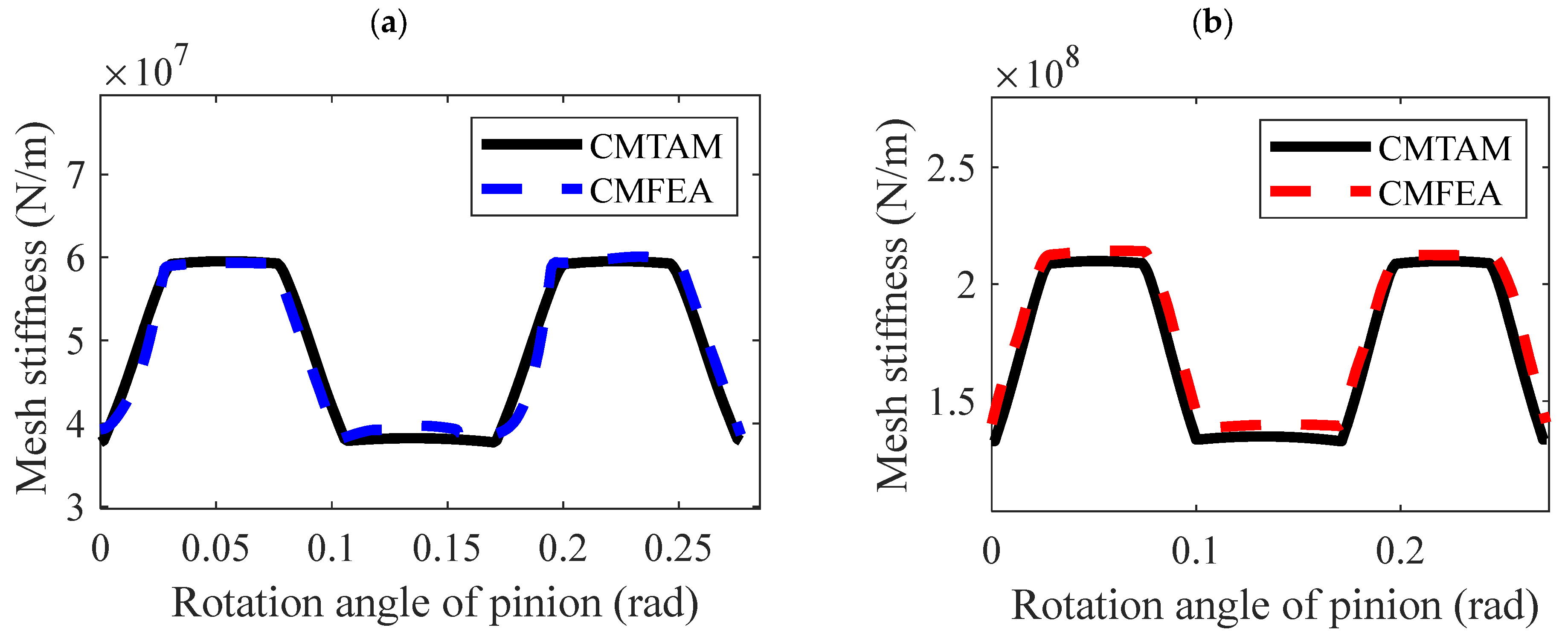
3. Finite Element Verification of TVMS
3.1. Finite Element Calculation Method for TVMS
3.2. Standard Straight Bevel Gear
3.3. Lead Crown Relief
3.4. Tooth Profile Modification
3.5. Comprehensive Modification
4. Dynamic Model of Straight Bevel Gears
4.1. Element Model of Gear Rotor
4.2. Gear Mesh Model
4.3. Element Model of the Shaft Element
4.4. Element Model of Bearing
4.5. Overall Assembly Matrix
5. Numerical Analysis
6. Conclusions
- The analytical algorithm for meshing stiffness of SBGs in this paper has been validated through comparison with the finite element method. The finite element calculation in this paper takes about 6 h (varying significantly based on computer configuration), while the analytical algorithm often requires only a few seconds, greatly improving efficiency while ensuring accuracy. Therefore, in dynamic simulation analysis, different modification schemes can be quickly designed according to vibration requirements.
- With profile modification, the abrupt changes in nonlinear stiffness excitation are smoothed, reducing dynamic transmission error within a specific range. When designing profile modifications, it is crucial to consider the varying requirements of time-varying meshing characteristics and vibration response characteristics when selecting profile modification amounts.
- Considering axial modification, the reduction in nonlinear time-varying meshing stiffness increases the dynamic transmission error amplitude, affecting the system’s natural frequencies. Consequently, resonance peaks shift. In designing axial modifications, the axial modification amount can be adjusted according to actual operating conditions to move resonance peaks away from the operating speed.
- When assessing the combined effects of profile and axial modifications, the change in vibration response is not merely additive, and their impacts on vibration response differ significantly. Therefore, when selecting modification parameters based on gear pair parameters and the vibration response induced by time-varying meshing stiffness excitation, minimizing or avoiding axial modification is advisable if resonance peaks do not require adjustment. Instead, control the profile modification amount to reduce system vibration while ensuring stability, thus achieving vibration reduction through modification.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| C | generating surface | R | base cone distance |
| O | origin of the coordinate system | A′A | tangent line |
| OA′ | radius of the spherical radius | rf | Gear tooth equation |
| n | normal vector of the tooth surface | φ | angle rolled by the occurring surface |
| base cone angle | ψ | the angle between OK and the instantaneous axis of rotation ON | |
| Mi | Transformation matrix of the gear projection to the zx plane | M∑ | Gear Assembly Variation Matrix |
| i | the pinion or the gear | the angle of rotation of the gear projection onto the zx plane | |
| Mθi | rotation angle matrices for the driving and driven gears | ri | contact points vector |
| ni | normal vectors of contact points vector | Z | Teeth number |
| m | Module | α | Pressure angle |
| B | Face width | ha | Addendum coefficient |
| c | Tip clearance coefficient | Ke | total meshing stiffness of a single gear pair |
| kb | bending stiffness | ks | shear stiffness |
| kh | Hertz contact stiffness | ka | axial compression stiffness |
| bending stiffness of slice | shear stiffness of slice | ||
| axial compression stiffness of slice | j | Number of slices | |
| bending energy of slice | shear energy of slice | ||
| axial compressive energy of slice | h | the distances from the meshing point to the gear teeth’s line of symmetry | |
| t | the distances from the meshing point to the base circle | F | interaction force |
| Fa | radial force | Fb | tangential force |
| E | elastic modulus | G | shear modulus |
| Ip | polar moment of inertia of the section | ρ | distance from the point on the cross-section to the center of the circle |
| K | time-varying meshing stiffness of straight bevel gears | l | the number of meshing pairs. |
| Ex | Modification of Lead crown relief | δ | deformation |
| KP | stiffness matrix of the pinion | total deformation matrix | |
| deformation matrix of the pinion | Ex | total modification matrix | |
| Fd | total meshing force matrix | Fm | resultant force of the sliced meshing forces |
| Fe | meshing force error | cycle coefficient | |
| Ek | Modification of tooth profile modification | Le | The distance from the modification position to the tooth tip. |
| xe | The distance from the start of the modification to the tip of the tooth. | σ | elastic deformations of tooth pairs within the double-tooth contact region under loading conditions. |
| Kt | meshing stiffness of the tooth profile modification | λ | directional rotation radius |
| L | Shaft end length | D | external diameter |
| Idn | Diameter moment of inertia | Idm | Polar moment of inertia |
| bl | Backlash | cm | Meshing damping |
| Kb | Bearing stiffness matrix | Cb | Bearing Damping Matrix |
| Construct vector | the deflection of gear pair of action | ||
| dynamic transmission error | geometric transmission error | ||
| Ldr | load distribution ratio | Mm | mass matrices of the gear pair |
| Cm | stiffness matrix of the gear pair | Km | damping matrix of the gear pair |
| the displacement vector of the Timoshenko beam element | Me | mass matrix of the Timoshenko beam element | |
| gyroscopic matrix of the Timoshenko beam element | stiffness matrix of the Timoshenko beam element | ||
| K | system’s stiffness matrix | C | system’s damping matrix |
| G | system’s gyroscopic torque matrix | K | system’s stiffness matrix |
| coefficient of mass matrix | coefficient of stiffness matrix |
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Pinion | rxp | ryp | rzp | nxp | nyp | nzp |
|---|---|---|---|---|---|---|
| 1 | −4.63 | 30.95 | 65.66 | −0.94 | −0.34 | 0.09 |
| 2 | −3.75 | 31.26 | 65.57 | −0.94 | −0.33 | 0.1 |
| 3 | −2.86 | 31.57 | 65.46 | −0.94 | −0.32 | 0.12 |
| 4 | −1.98 | 31.87 | 65.35 | −0.94 | −0.32 | 0.13 |
| 5 | −1.09 | 32.17 | 65.23 | −0.94 | −0.31 | 0.14 |
| 6 | −0.21 | 32.46 | 65.09 | −0.94 | −0.31 | 0.15 |
| 7 | 0.68 | 32.75 | 64.94 | −0.94 | −0.3 | 0.16 |
| 8 | 1.56 | 33.03 | 64.78 | −0.94 | −0.3 | 0.17 |
| 9 | 2.45 | 33.3 | 64.62 | −0.94 | −0.29 | 0.18 |
| 10 | 3.33 | 33.57 | 64.44 | −0.94 | −0.28 | 0.2 |
| gear | rxg | ryg | rzg | nxg | nyg | nzg |
| 1 | −4.63 | 65.66 | −30.95 | −0.94 | 0.09 | 0.34 |
| 2 | −3.75 | 65.57 | −31.26 | −0.94 | 0.10 | 0.33 |
| 3 | −2.86 | 65.46 | −31.57 | −0.94 | 0.12 | 0.32 |
| 4 | −1.98 | 65.35 | −31.87 | −0.94 | 0.13 | 0.32 |
| 5 | −1.09 | 65.23 | −32.17 | −0.94 | 0.14 | 0.31 |
| 6 | −0.21 | 65.09 | −32.46 | −0.94 | 0.15 | 0.31 |
| 7 | 0.68 | 64.94 | −32.75 | −0.94 | 0.16 | 0.30 |
| 8 | 1.56 | 64.78 | −33.03 | −0.94 | 0.17 | 0.30 |
| 9 | 2.45 | 64.62 | −33.30 | −0.94 | 0.18 | 0.29 |
| 10 | 3.33 | 064.44 | −33.57 | −0.94 | 0.20 | 0.28 |
References
- Li, R.W.J. Dynamics of Gear Systems; China Science Publishing: Beijing, China, 1997. [Google Scholar]
- Hu, Z.; Tang, J.; Zhong, J.; Chen, S.; Yan, H. Effects of tooth profile modification on dynamic responses of a high speed gear-rotor-bearing system. Mech. Syst. Signal Process. 2016, 76–77, 294–318. [Google Scholar] [CrossRef]
- Liu, G.; Parker, R.G. Dynamic Modeling and Analysis of Tooth Profile Modification for Multimesh Gear Vibration. J. Mech. Des. 2008, 130, 121402. [Google Scholar] [CrossRef]
- Tian, X. Dynamic Simulation for System Response of Gearbox Including Localized Gear Faults. Master’s Thesis, University of Alberta, Edmonton, AB, Canada, 2004. [Google Scholar]
- Sainsot, P.; Velex, P.; Duverger, O. Contribution of Gear Body to Tooth Deflections—A New Bidimensional Analytical Formula. J. Mech. Des. 2004, 126, 748–752. [Google Scholar] [CrossRef]
- Sun, Z.; Chen, S.; Hu, Z.; Tao, X. Improved mesh stiffness calculation model of comprehensive modification gears considering actual manufacturing. Mech. Mach. Theory 2022, 167, 104470. [Google Scholar] [CrossRef]
- Ma, H.; Li, Z.; Feng, M.; Feng, R.; Wen, B. Time-varying mesh stiffness calculation of spur gears with spalling defect. Eng. Fail. Anal. 2016, 66, 166–176. [Google Scholar] [CrossRef]
- Tang, J.-Y.; Pu, T.-P. Calculation of mesh stiffness of spiral bevel gear based on finite element method. Chin. J. Mech. Eng. 2011, 47, 7. [Google Scholar] [CrossRef]
- Chen, S.; Tan, R.; Guo, X.; Zhang, W.; Shu, R. Study on excitation and time-varying mesh characteristics of straight bevel gears considering modification and friction. Mech. Mach. Theory 2022, 176, 105028. [Google Scholar] [CrossRef]
- Li, H.; Tang, J.; Chen, S.; Ding, H.; Sun, Z.; Rong, K. Analytical calculation of mesh stiffness for spiral bevel gears with an improved global tooth deformation model. Mech. Mach. Theory 2024, 191, 105492. [Google Scholar] [CrossRef]
- Gou, X.-F.; Li, G.-Y.; Zhu, L.-Y. Dynamic characteristics of a straight bevel gear drive system considering multi-state meshing and time-varying parameters. Mech. Mach. Theory 2022, 171, 104779. [Google Scholar] [CrossRef]
- Li, H.; Chen, S.; Tang, J.; Chen, W.; Ouyang, H. A novel approach for calculating no-load static transmission error based on measured discrete tooth surfaces. Mech. Mach. Theory 2019, 138, 112–123. [Google Scholar] [CrossRef]
- Peng, T. Coupled Multi-body Dynamic and Vibration Analysis of Hypoid and Bevel Geared Rotor System. Ph.D. Thesis, University of Cincinnati, Cincinnati, OH, USA, 2010. [Google Scholar]
- Wang, H. Gear Mesh Characteristics and Dynamics of Hypoid Geared Rotor System. Ph.D. Thesis, The University of Alabama, Tuscaloosa, AL, USA, 2002. [Google Scholar]
- Wang, H.; Lim, T.C. Analysis of the Mesh Characteristics of Hypoid Gear Pair Dynamics. In Proceedings of the Asme International Design Engineering Technical Conferences & Computers & Information in Engineering Conference, Chicago, IL, USA, 2–6 September 2003. [Google Scholar]
- Djemal, F.; Lafi, W.; Tounsi, D.; Akrout, A.; Walha, L.; Haddar, M. Effects of mass imbalance and eccentricity defects on the automotive differential dynamics. J. Braz. Soc. Mech. Sci. Eng. 2021, 43, 419. [Google Scholar] [CrossRef]
- Ma, H.; Pang, X.; Feng, R.; Wen, B. Evaluation of optimum profile modification curves of profile shifted spur gears based on vibration responses. Mech. Syst. Signal Process. 2016, 70–71, 1131–1149. [Google Scholar] [CrossRef]
- Motahar, H.; Samani, F.S.; Molaie, M. Nonlinear vibration of the bevel gear with teeth profile modification. Nonlinear Dyn. 2016, 83, 1875–1884. [Google Scholar] [CrossRef]
- Talakesh, A.; Hadian Jazi, S.; Ariaei, A.; Poursina, M. A new experimental method for calculating mesh stiffness in healthy and cracked straight bevel gear system. Measurement 2024, 224, 113804. [Google Scholar] [CrossRef]
- Molaie, M.; Samani, F.S.; Zippo, A.; Iarriccio, G.; Pellicano, F. Spiral bevel gears: Bifurcation and chaos analyses of pure torsional system. Chaos Solitons Fractals 2023, 177, 114179. [Google Scholar] [CrossRef]
- Samani, F.S.; Salajegheh, M.; Molaie, M. Nonlinear vibration of the spiral bevel gear under periodic torque considering multiple elastic deformation evaluations due to different bearing supports. SN Appl. Sci. 2021, 3, 772. [Google Scholar] [CrossRef]
- Lafi, W.; Djemal, F.; Tounsi, D.; Akrout, A.; Walha, L.; Haddar, M. Non-probabilistic interval process method for analyzing two-stage straight bevel gear system with uncertain time-varying parameters. Proc. Inst. Mech. Eng. Part C J. Mech. Eng. Sci. 2020, 235, 3162–3178. [Google Scholar] [CrossRef]
- Yavuz, S.D.; Saribay, Z.B.; Cigeroglu, E. Nonlinear time-varying dynamic analysis of a spiral bevel geared system. Nonlinear Dyn. 2018, 92, 1901–1919. [Google Scholar] [CrossRef]
- Chowdhury, S.; Yedavalli, R.K. Vibration of high speed helical geared shaft systems mounted on rigid bearings. Int. J. Mech. Sci. 2018, 142–143, 176–190. [Google Scholar] [CrossRef]
- Han, H.; Zhang, S.; Yang, Y.; Ma, H.; Jiang, L. Modulation sidebands analysis of coupled bevel gear pair and planetary gear train system. Mech. Mach. Theory 2022, 176, 104979. [Google Scholar] [CrossRef]
- Litvin, F.L.; Donno, M.D.; Peng, A.; Vorontsov, A.; Handschuh, R.F. Integrated computer program for simulation of meshing and contact of gear drives. Comput. Methods Appl. Mech. Eng. 2000, 181, 71–85. [Google Scholar] [CrossRef]
- Litvin, F.L.; Fuentes, A. Gear Geometry and Applied Theory; Cambridge University Press: Cambridge, UK, 2004. [Google Scholar]
- Kolivand, M.; Ligata, H.; Steyer, G.; Benedict, D.K.; Chen, J. Actual Tooth Contact Analysis of Straight Bevel Gears. J. Mech. Des. 2015, 137, 093302. [Google Scholar] [CrossRef]
- Wan, Z.; Cao, H.; Zi, Y.; He, W.; Chen, Y. Mesh stiffness calculation using an accumulated integral potential energy method and dynamic analysis of helical gears. Mech. Mach. Theory 2015, 92, 447–463. [Google Scholar] [CrossRef]
- Wu, S.; Zuo, M.J.; Parey, A. Simulation of spur gear dynamics and estimation of fault growth. J. Sound Vib. 2008, 317, 608–624. [Google Scholar] [CrossRef]
- Sun, X. Mechanics of Materials; Higher Education Press: Beijing, China, 2009. [Google Scholar]
- Xia, C. Research on theTooth Modification Methods of the Straight Bevel Gear. Ph.D. Thesis, Huazhong University of Science and Technology, Wuhan, China, 2006. [Google Scholar]
- Wang, Q.; Xu, K.; Huai, T.; Ma, H.; Wang, K. A mesh stiffness method using slice coupling for spur gear pairs with misalignment and lead crown relief. Appl. Math. Model. 2021, 90, 845–861. [Google Scholar] [CrossRef]
- Walker, H. Gear Tooth Deflection and Profile Modification. Engineer 1990, 166. [Google Scholar]
- Ma, H.; Zeng, J.; Feng, R.; Pang, X.; Wen, B. An improved analytical method for mesh stiffness calculation of spur gears with tip relief. Mech. Mach. Theory 2016, 98, 64–80. [Google Scholar] [CrossRef]
- Tang, J.Y.; Cai, W.X.; Wang, Z.W. Meshing stiffness formula of modification gear. J. Cent. South Univ. Sci. Technol. 2017, 48, 337–342. [Google Scholar]
- Cao, W.; Pu, W.; Wang, J. Tribo-dynamic model and fatigue life analysis of spiral bevel gears. Eur. J. Mech.-A/Solids 2019, 74, 124–138. [Google Scholar] [CrossRef]
- Chen, S.; Tang, J.; Li, Y.; Hu, Z. Rotordynamics analysis of a double-helical gear transmission system. Meccanica 2016, 51, 251–268. [Google Scholar] [CrossRef]
- Smith, J.D. Gears and Their Vibration, A Basic Approach to Understanding Gear Noise; Marcel Dekker Inc.: Abington, UK, 1983. [Google Scholar]
- Nelson, H.D. A Finite Rotating Shaft Element Using Timoshenko Beam Theory. J. Mech. Des. 1980, 102, 793–803. [Google Scholar] [CrossRef]
















| Parameters | Pinion 1 | Gear 1 | Pinion 2 | Gear 2 |
|---|---|---|---|---|
| Teeth number: Z | 37 | 74 | 37 | 74 |
| Module: m (mm) | 0.5 | 0.5 | 2 | 2 |
| Pressure angle: α (°) | 20 | 20 | 20 | 20 |
| Face width: B (mm) | 5 | 5 | 20 | 20 |
| Addendum coefficient: ha | 1 | 1 | 1 | 1 |
| Tip clearance coefficient: c | 0.2 | 0.2 | 0.2 | 0.2 |
| shaft intersection angle ∑ (°) | 90 | |||
| Parameters | Pinion 1 | Gear 1 | Pinion 2 | Gear 2 | |
|---|---|---|---|---|---|
| Teeth number: Z | 37 | 74 | 37 | 74 | |
| Module: m (mm) | 0.5 | 0.5 | 2 | 2 | |
| Pressure angle: α (°) | 20 | 20 | 20 | 20 | |
| Face width: B (mm) | 5 | 5 | 20 | 20 | |
| Young’s modulus: E (Gpa) | 206 | 206 | 206 | 206 | |
| Poisson’s ratio: υ | 0.3 | 0.3 | 0.3 | 0.3 | |
| Addendum coefficient: ha | 1 | 1 | 1 | 1 | |
| Tip clearance coefficient: c | 0.2 | 0.2 | 0.2 | 0.2 | |
| Torque load: T (Nm) | 0.5 | 0.5 | 10 | 10 | |
| TPM (μm) | 3 | 3 | 5 | 5 | |
| LCR (μm) | 3 | 3 | 5 | 5 | |
| CM (μm) | TPM (μm) | 3 | 3 | 5 | 5 |
| LCR (μm) | 3 | 3 | 5 | 5 | |
| k-Error-Max (MN/m) | Mean-k (MN/m) | TIME | ||||||
|---|---|---|---|---|---|---|---|---|
| a.A | a.B | b.A | b.B | a | b | a | b | |
| FEM | 170.3 | 99.47 | 689.7 | 407.5 | 147.0 | 545.0 | 6.32 (h) | 6.45 (h) |
| TAM | 177.9 | 100.5 | 670.7 | 389.5 | 149.8 | 581.0 | 1.84 (s) | 1.96 (s) |
| error | 4.27% | 1.02% | 2.75% | 4.42% | 1.20% | 5.68% | ||
| k-Error-Max (MN/m) | Mean-k (MN/m) | TIME | ||||||
|---|---|---|---|---|---|---|---|---|
| a.A | a.B | b.A | b.B | a | b | a | b | |
| LCRFEM | 57.39 | 37.43 | 212.0 | 141.1 | 52.74 | 192.7 | 6.34 (h) | 6.45 (h) |
| LCRTAM | 58.66 | 38.23 | 215.6 | 139.3 | 51.79 | 187.0 | 4.72 (s) | 3.94 (s) |
| error | 1.3% | 2.09% | 2.60% | 1.28% | 1.80% | 2.96% | ||
| k-Error-Max (MN/m) | Mean-k (MN/m) | TIME | ||||||
|---|---|---|---|---|---|---|---|---|
| a.A | a.B | b.A | b.B | a | b | a | b | |
| TPMFEM | 178.0 | 94.00 | 663.3 | 400.1 | 126.5 | 493.6 | 6.5 (h) | 6.56 (h) |
| TPMTAM | 170.7 | 100.4 | 681.6 | 383.0 | 128.1 | 485.5 | 2.52 (s) | 1.49 (s) |
| error | 4.1% | 6.37% | 2.68% | 4.27% | 1.30% | 1.64% | ||
| k-Error-Max (MN/m) | Mean-k (MN/m) | TIME | ||||||
|---|---|---|---|---|---|---|---|---|
| a.A | a.B | b.A | b.B | a | b | a | b | |
| CMFEM | 48.61 | 38.23 | 190.2 | 141.1 | 46.81 | 170.6 | 6.12 (h) | 6.25 (h) |
| CMTAM | 51.91 | 39.72 | 198.1 | 134.5 | 45.50 | 167.2 | 3.82 (s) | 2.79 (s) |
| error | 6.36% | 3.75% | 3.99% | 4.68% | 2.80% | 1.99% | ||
| Parameters | L1 | L2 | L3 | L4 | L5 | L6 | D1 | D2 |
|---|---|---|---|---|---|---|---|---|
| Length (mm) | 40 | 20 | 20 | 16 | 20 | 30 | ||
| Radius (mm) | 16 | 32 | ||||||
| Density (kg/m3) | 7860 | |||||||
| Young’s modulus E (Gpa) | 206 | |||||||
| Poisson’s ratio | 0.3 | |||||||
| Parameters | Pinion 1 | Gear 1 |
|---|---|---|
| Teeth number Z | 37 | 74 |
| Module m (mm) | 2 | |
| Pressure angle α (°) | 20 | 20 |
| Face width B (mm) | 20 | 20 |
| Young’s modulus E (Gpa) | 206 | 206 |
| Poisson’s ratio | 0.3 | 0.3 |
| Addendum coefficient ha | 1 | 1 |
| Tip clearance coefficient c | 0.2 | 0.2 |
| Enter Torque load T (N·m) | 10 | |
| Density (kg/m3) | 7860 | |
| Diameter moment of inertia Idn (Kg·m2) | 1.53 × 10−4 | 0.003 |
| Polar moment of inertia Idm (Kg·m2) | 2.78 × 10−4 | 0.006 |
| Backlash bl (μm) | 20 | |
| Meshing damping cm (Ns/m) | 1500 | |
| Parameters | Bearing 1 | Bearing 2 | Bearing 3 | Bearing 4 |
|---|---|---|---|---|
| Kb | Diag(1.6 × 108, 1.6 × 108, 1.6 × 108,105, 105) | |||
| Cb | Diag(103, 103, 103, 103, 103) | |||
| Node position | 2 | 8 | 10 | 16 |
| Order | f/Hz | rpm/(r/min) |
|---|---|---|
| 1 | 1426 | 2312 |
| 2 | 1480 | 2400 |
| 3 | 1651 | 2677 |
| 4 | 1727 | 2800 |
| 5 | 1730 | 2805 |
| 6 | 2272 | 3684 |
| 7 | 2695 | 4370 |
| 8 | 3511 | 5693 |
| Order | f/Hz | rpm/(r/min) |
|---|---|---|
| 1 | 1283 | 2080 |
| 2 | 1331 | 2158 |
| 3 | 1665 | 2700 |
| 4 | 1772 | 2873 |
| 5 | 1855 | 3008 |
| 6 | 2224 | 3606 |
| 7 | 2695 | 4370 |
| 8 | 3496 | 5669 |
| Order | f/Hz | rpm/(r/min) |
|---|---|---|
| 1 | 1420 | 2302 |
| 2 | 1480 | 2400 |
| 3 | 1643 | 2664 |
| 4 | 1727 | 2800 |
| 5 | 1730 | 2805 |
| 6 | 2217 | 3595 |
| 7 | 2695 | 4370 |
| 8 | 3495 | 5667 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, D.; Hu, Z.-H.; Liu, W.-T.; Tang, J.-Y.; Sun, Z.; Tian, Z.-Y. Mesh Stiffness and Dynamic Modeling and Analysis of Modified Straight Bevel Gears. Appl. Sci. 2024, 14, 11919. https://doi.org/10.3390/app142411919
Zhang D, Hu Z-H, Liu W-T, Tang J-Y, Sun Z, Tian Z-Y. Mesh Stiffness and Dynamic Modeling and Analysis of Modified Straight Bevel Gears. Applied Sciences. 2024; 14(24):11919. https://doi.org/10.3390/app142411919
Chicago/Turabian StyleZhang, Ding, Ze-Hua Hu, Wen-Tao Liu, Jin-Yuan Tang, Zhou Sun, and Zhao-Yang Tian. 2024. "Mesh Stiffness and Dynamic Modeling and Analysis of Modified Straight Bevel Gears" Applied Sciences 14, no. 24: 11919. https://doi.org/10.3390/app142411919
APA StyleZhang, D., Hu, Z.-H., Liu, W.-T., Tang, J.-Y., Sun, Z., & Tian, Z.-Y. (2024). Mesh Stiffness and Dynamic Modeling and Analysis of Modified Straight Bevel Gears. Applied Sciences, 14(24), 11919. https://doi.org/10.3390/app142411919