Abstract
The mining industry is experiencing a transformative shift with the integration of automation, particularly through autonomous haul truck systems, and further advancements are anticipated with the application of swarm robotics. This study evaluates the performance of four swarm robot models, namely baseline, ant, firefly, and honeybee, in optimizing key mining operations such as ore detection, extraction, and transportation. Simulations replicating real-world mining environments were conducted to assess improvements in operational efficiency, scalability, reliability, selectivity, and energy consumption. The results demonstrate that these models can significantly enhance the precision and productivity of mining activities, especially in complex and dynamic settings. A case study of the Pilbara iron ore mine in Australia is presented to illustrate the practical applicability of these models in an actual mining context. The study also highlights specific enhancements in each model, including role specialization in the ant model, advanced communication in the firefly model, and improved localization combined with hybrid control in the honeybee model. While the honeybee model showed superior performance in high-precision tasks, its reliability was limited under high-error conditions, and it faced a computational resources bottleneck in large-scale operations, highlighting the need for further development. By evaluating these models against performance criteria, the study identifies the most suitable swarm models for various mining conditions, offering insights into achieving more sustainable, scalable, and efficient mining operations.
1. Introduction
The mining industry is undergoing a significant transformation to meet stringent environmental standards, cater to the growing global population, and satisfy the demands of industries such as technology, construction, and energy [1]. This shift involves adopting highly automated systems aimed at achieving more sustainable and efficient operations [1]. Major Australian mining companies like Rio Tinto, BHP Billiton, and Fortescue Metals Group are at the forefront of this technological evolution, incorporating advanced technologies like autonomous haulage systems (AHS) and autonomous drilling systems (ADS) [2]. Rio Tinto reported 11% improvement in operational performance at its Pilbara iron ore mine after integrating these technologies [3], while BHP Billiton observed a 25% increase in production, a 40% reduction in drilling costs, and an 80% reduction in accidents at its Jimblebar iron ore mine [4]. Fortescue Metals Group’s deployment of AHS units at Chichester Hub mine, Eliwana Western Hub mine, and Solomon Hub mine in Pilbara led to a 50% reduction in production costs between 2015 and 2019 [5]. Despite these advancements, substantial human input is still required, particularly in scenarios where engineers and operators remotely control AHS trucks using joysticks and other sophisticated handheld controllers. Full automation remains a challenge in the mining sector, highlighting the need for further technological advancements. One promising solution is the application of swarm robotics, inspired by the collective behaviors of biological systems like ants, honeybees, and fireflies. These systems excel in decentralized decision-making and self-organization, potentially offering significant improvements in scalability, flexibility, and reliability for automated mining systems [6].
Swarm robotics has already found applications in various fields, including agriculture, medicine, and construction. For example, the Swarm Robotics for Agricultural Applications (SAGA) project optimizes farming tasks using honeybee-inspired models [7]. Thamrin et al. (2022) reported that a small-scale unmanned vehicle, using an automated navigation system with infrared sensors and Bezier curves, navigates, monitors, and harvests plantations with narrow pathways, reducing the need for manual labor [8,9]. In medicine, millirobots mimicking caterpillars or jellyfish have been developed for intricate medical procedures such as arteries navigation, targeted drug delivery, and internal examinations of the human body [10]. In construction, fiber-bots and KALI are inspired by particle swarms and termite colonies, respectively [11,12]. Swarm robotics are also used in rescue operations, transportation, logistics, and other domains [13]. However, despite its success in these areas, swarm robotics remains underutilized in mining [14]. Preliminary studies have explored its potential in mining operations, particularly in ore detection, transportation, and exploration within simulated environments. Research has demonstrated the benefits of decentralized control and cooperative behavior in mining tasks [15]. Subhan et al. (2014) highlighted the advantages of using unmanned vehicles in coal mines for ore detection and mining tasks [16]. Similarly, Tan et al. (2021) [15] proposed a swarm robotic system for extraterrestrial mining using the ABCO method, showing how nature-inspired swarm behaviors can enhance mining efficiency and reliability. The study by Duarte et al. (2016) emphasized the applicability of swarm behaviors in mining tasks and large-scale robot swarms for ore detection [17]. The use of nature-inspired algorithms has been widely studied and applied to various optimization problems in the mining industry, such as inaccurate drill hole positioning and mineral estimation, long-term scheduling challenges under grade uncertainty, inefficiencies in production rate due to fixed dispatch methods, and inefficiency of traditional methods in meeting high-quality data and computational resources [18]. Although automation technologies like AHS and ADS have advanced significantly [2], full automation has not been achieved yet. The European Space Agency’s (ESA) PANGAEA-X event highlighted the potential of swarm intelligence to achieve greater autonomy and scalability in operations [19]. Looking ahead, the roadmap proposed by Anderson [20] envisions fully autonomous mining operations without human operators on-site. This roadmap focuses on key areas such as production, construction, and demolition of infrastructure, monitoring of equipment and the mine environment, and logistics and support systems as the first steps toward this future [21]. The shades from grey to white represent the progression from manual mining to mechanized, remote production, robotized mining and finally autonomous mining, indicating increasing levels of automation with autonomous mining requiring minimal to no human intervention, as shown in Figure 1.
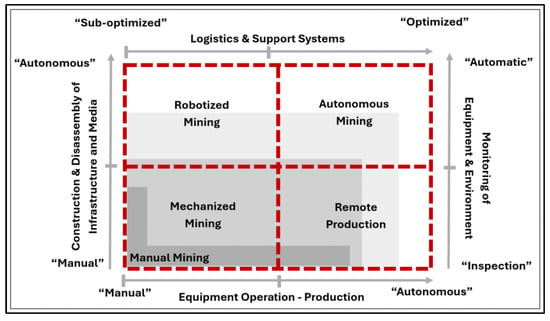
Figure 1.
Mining technology evolution roadmap [21] (used with permission from Swedish Mining Innovation).
This study presents simulations of nature-inspired swarm robot models, developed by the author, based on the behaviors of ants, honeybees, and fireflies using the Robot Operating System (ROS). These models have been specifically designed to investigate their applications in mining operations, such as ore detection, extraction, and transportation. Furthermore, a case study on Pilbara iron ore mine has been conducted to assess the real-world applicability of these models in an actual mining environment. Rio Tinto’s Pilbara iron ore mine has been selected for the real-world model, because it has successfully implemented automated systems and is one of the most technologically advanced mining sites in the world renowned for leading smart mines. These make it the best-suited mine site for testing the swarm robot’s applications in automated large-scale mining operations. To provide a clear roadmap on the research conducted, the overall logic diagram, illustrating the progression from model development through to simulation, testing, and analysis, is presented in Figure 2.
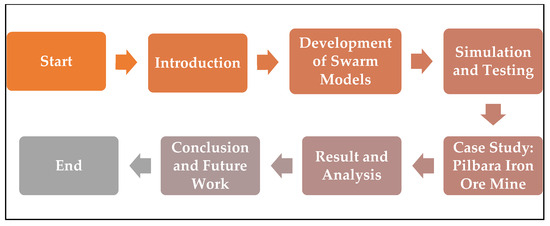
Figure 2.
Overall logic diagram.
The subsequent sections of this paper are organized as follows: Section 2 presents case studies on applying the considered swarm robotics models to the Pilbara iron ore mine. Section 3 discusses the development of the swarm models, and Section 4 evaluates the performances of the proposed swarm robotics systems. Section 5 focuses on results and discussions, Section 6 discusses future directions and real-world implementations, and Section 7 concludes the paper.
2. Case Study: Applications to Pilbara Iron Ore Mine
2.1. Overview of the Pilbara Iron Ore Mine
The Pilbara iron ore mine, located in the Pilbara region of Western Australia, is one of the world’s largest producers and exporters of iron ore. The mine, owned by a subsidiary of multinational Rio Tinto [22,23], is known for its extensive use of automation and digitalization. Pilbara’s operations employ autonomous transport systems, drills, and trains, significantly reducing the need for on-site labor [24]. This high level of automation not only improves mine safety and operational efficiency, but also allows operators to remotely control vehicles and equipment from a central hub in Perth [25]. This approach sets a new standard for the mining industry and demonstrates the impressive potential for advanced technology to transform traditional mining practices. Despite Pilbara iron ore mine’s advanced automation and digitalization, opportunities and needs for further improvement still remain. The mine continues to address issues related to geological modeling, intelligent systems for material tracking and probabilistic reasoning, mine planning and production scheduling, and robotic sensing and automation [26]. The main challenge is to obtain reliable estimates of uncertainty and average grade from sparse data, which is critical for confidently selecting high-grade ore. As high-grade hematite ore becomes increasingly depleted, the need for accurate and frequently updated geological models becomes extremely important [27,28]. These models must reflect the current state of the mine, requiring the use of advanced stochastic models to effectively track material movement and mine status. Material tracking and planning also present significant challenges, especially in keeping grade control and planning tools up to date. These require intelligent systems that can dynamically track material movement and update the mine’s digital twin. This task is further complicated by the challenges in reporting changes in ore grade and quality, especially as the industry increasingly relies on beneficiation processes to upgrade the lower-grade ores [28,29]. In the field of robotics, achieving continuous autonomy is critical for ensuring resilience in unpredictable situations, such as harsh and hazardous environments. Interoperability and reliability of complex robotic systems in dynamic mining environments are critical for maintaining continuous operations. These systems must adapt to changing conditions in the mines, ensuring operations remain efficient and safe. In addition, improving the integration and coordination of different operational planning layers remains a pressing challenge [26]. These layers must be better coupled to improve overall operational efficiency, which directly impacts the productivity and sustainability of the Pilbara iron ore mining operations.
2.2. Simulation Setup Using Pilbara Geological Data
To investigate possible improvements in operational aspects of the Pilbara iron ore mine, a comprehensive simulation model of the mine has been created by using precise geological data from the region. The model is well suited to Pilbara open pit mining techniques as the simulation accurately depicts the topography and levels of the mine site, which are of relatively even terrains and flat surfaces [30,31]. For the large-scale mining of the low-grade goethite and high-grade hematite, this approach involves removing the overburden to reach the shallow ore bodies. Similar approaches are presented in Figure 3, where (a) is a top view of the South Flank Pilbara mine and (b) is open-pit mining operations operated by BHP Billiton Mining Group [32].
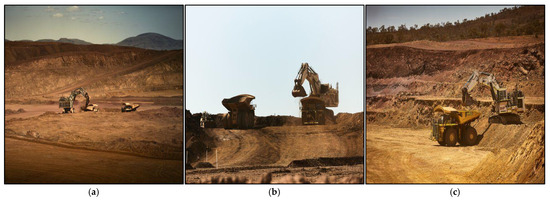
Figure 3.
Different views of surface mining operations at BHP’s South Flank mine in Pilbara [32]: (a–c). (used with permission from BHP).
As high-grade ores become increasingly scarce, the simulation takes into consideration the growing need for beneficiation processes to increase the grade of the mined ore [27,28,29]. The integration of automated haulage systems that are critical to operations was modelled using a comprehensive simulation. These systems reduce the need for human intervention, increase productivity, and speed up the transportation of ore at large-scale mining sites. The simulation includes these logistical elements in addition to haulage operations. The main themes of the simulation are geological topography, ore-grade variations, and the contribution of the automated haulage to improving operational efficiency, selectivity, and reliability. Environmental factors such as temperature, dust, and the remote location of the mine site [26] are outside the scope of this research, and hence, are not included in the model. The aim is achieving improvements in the efficiency and sustainability of Pilbara iron ore mine’s operations by testing and fine-tuning the mining strategies in this virtual environment.
3. Swarm Robotics Design and Simulation
This section discusses developing nature-inspired swarm robotics models for mining efficiency and intra-swarm robot interactions based on various swarm behaviors in nature. These models were initially developed from a bottom-up design that was progressively improved and enriched with unique traits specific to various swarm models from nature, such as ant, firefly, and honeybee, among others [16]. Further enhancements were made to the swarm robotic systems to optimize their collective behavior and improve their adaptability to complex mining environments. These enhancements, which include role specialization, communication, and localization, are elaborated in Section 3 of this paper. To provide an overview of the entire research process, the detailed research workflow, outlining the key steps from model conceptualization through to simulation and performance analysis, is presented in Figure 4.
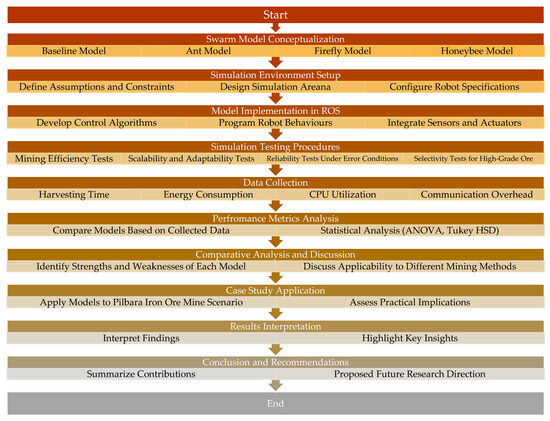
Figure 4.
Research workflow diagram.
3.1. Simulated Hardware Design for Robots
3.1.1. Mechanical Structure
Each swarm robot has a small chassis (0.10 m long and 0.15 m high) that allow it to move easily in the simulated mining environment. The robot is equipped with four wheels, each driven by a simulated high-torque DC motor. These motors enable the robot to move stably and precisely at a constant speed of 0.2 m/s in the simulated environment of the Pilbara iron ore mining operation. The chassis’ design allows for durability and manoeuvrability, which are critical in the simulated harsh mining conditions. The simulated robot materials are based on the ones used to manufacture the actual robots, i.e., are durable and can withstand the harsh environment of mining, including mechanical stress. These aspects are reflected in the simulated environment to ensure that the robot design is rugged and can continue to operate in challenging situations.
3.1.2. Sensor and Actuators
Mounted on the front of the robot is a 360-degree LiDAR sensor that is 100% error-free and continuously scans the environment within a 1-m range. This sensor is essential for creating a real-time 2D map of the environment and enabling efficient navigation and obstacle avoidance in a mining environment. The robot also uses wheel encoders and an inertial measurement unit (IMU) to accurately track its orientation and position in the simulation. An onboard computer processes these sensory inputs in real time to make quick navigation decisions, which is essential to maintaining the effectiveness and safety of the swarm. The hook-lift system is a key component for ore-handling tasks and one of the robot’s standout features. A vertical arm with a powerful hook is part of this system and is driven by a software to operate the electric winch. To ensure accurate and stable loading and unloading, the hook is programmed to engage precisely with the lifting points on the block. To keep the robot stable during transport, the system can control the size and weight of the simulated blocks.
3.1.3. Power and Communications Systems
The software regulates power consumption for a range of robot functions such as movement, lifting, and communication using a simulated lithium-ion battery pack. For extended mining operations, this power-management system ensures that each robot can operate continuously for up to 8 h. The software controls a simulated 2.4 GHz wireless mesh network that the robots use to communicate. By facilitating reliable data exchange between the robots, the network facilitates coordinated operations such as ore transport and collection. Top-mounted LEDs and optical beacons (with a range of 1.8 m) improve the communication between the robots. For swarm coordinated operations, the software ensures that these communication channels are managed effectively.
3.2. Swarm Control Architecture
Control and decision-making are centralized in an onboard computer running the Robot Operating System (ROS) under ROS 1 Noetic Ninjemys. ROS provides numerous software libraries and tools for creating graphical user interfaces (GUIs) for the swarm robots and the Gazebo simulation environment. The system is equipped with a 64-bit operating system, an Intel Core i7-10700 CPU, an HP Zen2 G5 TWR, 16 GB RAM, and Ubuntu Linux 22.04 Focal version, allowing an excellent performance configuration. The software coordinates group actions within the swarm, manages the hook lifting system, and integrates sensor data. To facilitate coordinated operations such as ore transportation and collection, the software controls a simulated 2.4 GHz wireless mesh network to enable communication between robots. Because ROS’s Unified Robot Description Format (URDF) is used in the modelling process, the robot’s functions and physical components are accurately portrayed in the simulation. To ensure efficient operation in the simulation environment, the software also includes tools such as OpenCV for monitoring and Rviz for real-time visualization.
3.3. Swarm Model Design
3.3.1. Baseline Model
The baseline model serves as a standard for comparison in simple mining tasks, such as basic ore extraction (e.g., scraping a layer of iron ore regolith using a bucket excavator) and ore transportation (e.g., delivering material using a haulage truck) within mining operations. It uses a finite state machine (FSM) to implement basic operations such as detection, grasping, and transportation. Each robot can complete all tasks, ensuring flexibility, but lacks the benefits of specialisation. The FSM outlines a simple process where the robots transition from a standby state to a random walk to detect an object. Once an object is detected, robots attempt to grasp it and, if successful, they deliver the object to a designated “nest” area. The system loops back to the initial state to continue the operation. The model operates under a decentralized control system, allowing each robot to operate independently without centralized guidance. The FSM outlining the basic operation process is shown in Figure 5.

Figure 5.
Finite-state machine for the baseline model.
3.3.2. Ant Model
Starting from a basic framework, the ant model introduces role specialization, drawing inspiration from the division of labor observed in leafcutter ants [33,34]. In this model, specific tasks are assigned to two distinct groups of robots: the blue picker robots, analogous to leafcutter ants, focus on ore collection, while the red loader robots, similar to porter ants, are responsible for transporting the ore to a central “nest”. This role specialization enhances efficiency in ore transportation by reducing the distance traveled, thereby decreasing transportation time. The model is particularly effective in environments where ore is concentrated in specific areas, such as in vein mining or block caving. The ant model operates under a decentralized control system, allowing robots to independently execute their designated roles while adhering to a structured finite state machine (FSM) that governs role-specific states and transitions, such as “picking” for pickers and “transporting” for loaders [35]. This FSM-driven approach ensures that each group of robots efficiently performs its specialized tasks, as illustrated in Figure 6.
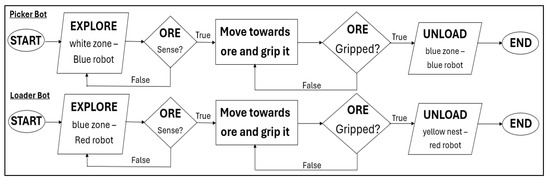
Figure 6.
Finite-state machine for the ant model.
3.3.3. Firefly Model
The firefly model enhances swarm robotics by incorporating communication mechanisms essential for tasks like ore exploration and selective mining. These mechanisms mimic the bioluminescent signals used by fireflies [36,37], facilitating efficient coordination among robots, particularly in open-pit mining where ore deposits are dispersed and require targeted exploration. In this model, two types of robots are distinguished: a guide robot that emits light using LEDs and a pick-up robot that responds to this signal. The firefly model’s communication system allows robots to effectively target and extract high-grade ores, reducing the time needed for further exploration. This coordination is managed by a finite-state machine (FSM) that guides the robots through a sequence of actions, including exploration, light detection, and movement toward the light. Operating under a decentralized control system, the FSM directs the processes of exploration and movement towards light signals, ensuring efficient task execution. The operational flow of the firefly model, as governed by the FSM, is illustrated in Figure 7.
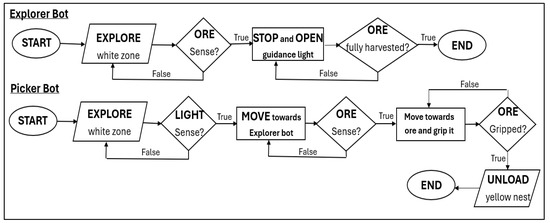
Figure 7.
Finite-state machine for the firefly model.
3.3.4. Honeybee Model
The honeybee model represents the most advanced approach, specifically designed for high-precision mining tasks such as selective ore extraction in an underground environment. It introduces a hybrid control system that combines centralized and decentralized controls, optimizing exploration, precision of ore extraction, and efficiency of material transport, particularly in settings where accurate localization and targeted extraction are critical. This model builds upon the capabilities of earlier models by incorporating enhanced localization and communication systems, inspired by the foraging behavior and structured division of labor found in honeybee colonies [15,38]. In the context of ore mining and transportation, the honeybee model’s hybrid control system ensures precise ore extraction and an efficient flow of materials from the mining site to the processing site. Scout robots are tasked with identifying resource locations and communicating detailed information back to the central “hive” using digital “waggle dances”. Observation robots process this information to accurately pinpoint resource locations [39], while a master robot oversees the recruitment and deployment of harvesting robots, optimizing the entire process. This approach results in significant advancements in role specialization, communication, and localization capabilities. The operational flow of the honeybee model, as directed by the FSM, is depicted in Figure 8.
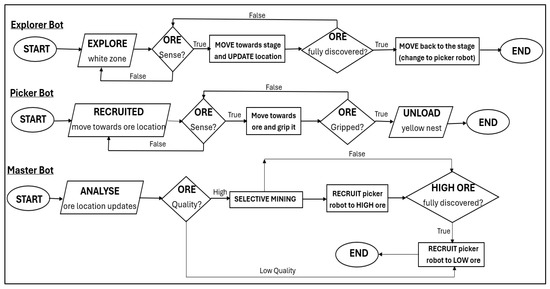
Figure 8.
Finite-state machine for the honeybee model.
3.4. Swarm Robotics and Formation Control
3.4.1. Strategic Development Approach
This section outlines a strategic development approach for swarm robotics applied to mining, where each subsequent model builds on its predecessor by integrating increasingly complex and efficient mechanisms. The process begins with a baseline model that serves as a foundational platform. The subsequent models, i.e., the ant, firefly, and honeybee models, are enhancements to this standard, each incorporating specialized roles, enhanced communication capabilities, and precise localization techniques that mimic behaviors observed in nature.
3.4.2. Formation Control Mechanisms
The ant and firefly models use decentralized control and behavior-based formation control, that allow the robots to form a network in an ordered manner, where such a network interacts with neighboring agents [18]. These settings facilitate autonomous collective behavior that is flexible and does not require centralized supervision. Contrary to this, the honeybee model has a hybrid control system that combines both centralized and decentralized controls with autonomous leader-follower and behavior-based formation controls. In this configuration, a robot can effectively communicate, share information, and accurately interpret data location for optimal performance [18]. The honeybee model blends centralized coordination with decentralized flexibility, making it well-suited for the dynamic and complex mining environment.
4. Simulation Environment
4.1. Assumption and Simulation Constraints
To keep the focus on specific aspects such as ore detection, collection efficiency, navigation precision, and communication reliability of the swarm robots model application in the mining environment, a number of assumptions and conditions have been set for the simulation environment and the execution of the simulations. To make the evaluation of ore exploration, collection, and transportation more realistic, the simulation was conducted after pre-stepping terrain conditions. In this setup, the robots navigate a flat and smooth surface, similar to the terrain at the Pilbara iron ore mine following the pre-stripping process, which is typically performed before mining excavation begins. To address the need for continuous autonomy in large-scale mining, robots have been equipped a battery with 8 h life To ensure a stable communication network for simulation, it was assumed that issues such as latency and interference are not present. The simulation assumes static environmental conditions, no sensor errors, and no physical challenges such as dragging or ore breakage. The simulation was carried out for 15 robots due to ROS simulation environment limitations resulting in system instability at higher numbers. The performances of the LiDAR, IMU, and wheel encoders were optimized to achieve 100% accuracy. For the predetermined ore locations as well, the robots would still simulate autonomous navigation and adaptation. Demonstrating that the robots can perform this task flawlessly in the simulation is important because dynamic exploration is essential for real-world mining. Focusing on mining-related specific aspects in this case study provides insights into the performance of swarm robots in challenging mining environments.
4.2. Simulation Setup for Testing
The simulation environment was developed to closely mimic the actual mining conditions at Pilbara iron ore mine. In particular, the surface levels of the simulated area closely resemble the overall topography of the Pilbara region, which has a flat topography typical of open-pit mining. This configuration allows the swarm robots to be tested in a controlled environment without the difficulties caused by uneven terrain, allowing their ability to locate, collect, and move ore to be effectively assessed. The following colour-coding is used in the simulation: white sections represent mineral-rich areas in the simulation, green blocks represent high-grade hematite, and red blocks represent low-grade goethite. The diagram highlights the ongoing challenges faced by mining operations at the Pilbara iron ore mine, which are increasingly reliant on mineral processing and beneficiation methods due to the depletion of the high-grade ore. Depending on the considered swarm model, the arrangement of the nested areas in which the swarm robots operate differs. For example, in the ant model, a large blue circle called a “cache” represents the coordination required to collect and transport ore. The honeybee model, on the other hand, mimics the communication process inspired by the waggle dance behavior of bees by using four rectangular areas referred to as “dance floors”, close to the central base. These areas facilitate the exchange of information between the robots about resource locations and task updates. In this environment, swarm robot models can be thoroughly tested under simplified and controlled conditions, focusing on core functionalities such as ore detection and transportation. While certain complicating factors typical of real-world mining, such as environmental variability and physical obstacles, have been omitted for clarity, the simulation still provides valuable insights on how these models can be used to improve the robustness and efficiency of large-scale mining operations. Figure 9 illustrates these complex configurations and shows how the simulation environment closely resembles the considered real-world mining scenario at Pilbara.
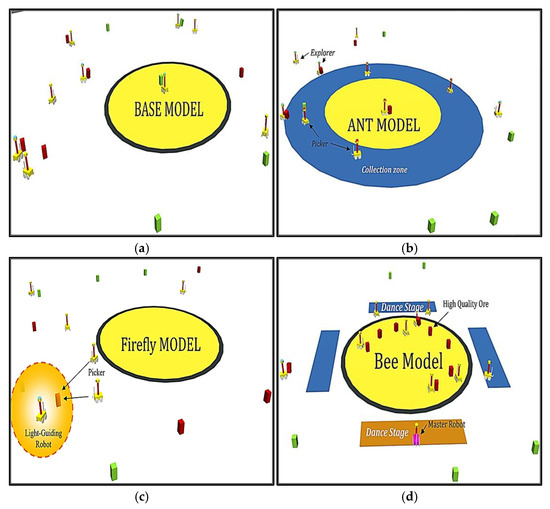
Figure 9.
Arena setup in ROS for four different swarm robotics models: (a) baseline model, where all robots perform the same tasks without role specialization or communication; (b) ant model, which introduces role specialization between “picker” and “explorer” robots and features a collection zone that mimics the task division seen in ant colonies; (c) firefly model, utilizing a light-guiding robot to coordinate other “picker” robots through bioluminescent-inspired communication, improving task coordination and resource detection; (d) honeybee model, which mimics bee colony behaviour with a “master robot” coordinating tasks through centralized communication from the “dance stages” to identify high-quality ore (hematite).
5. Results and Discussions
This section evaluates the performance of each swarm model in carrying out mining tasks such as ore detection, transportation, and quality assessment. The ant model’s task specialization effectively reduces congestion and increases the efficiency in ore transportation. The firefly model’s advanced communication system improves the accuracy and speed of ore detection and transportation. The honeybee model’s centralized control ensures precise ore quality assessment, focusing on prioritizing high-grade ores during extraction. All models were tested in a standard scenario within a 15 m by 15 m environment, where 20-ore blocks are concentrated in a single pile. This arrangement mimics the geological structure of the Pilbara iron ore mine, where hematite is typically found in extensive, flat sedimentary layers known as banded iron formations (BIF). These formations consist of alternating layers of iron oxides, such as hematite and magnetite, and silica-based minerals like quartz or chert. By flattening the ore pile across the area in the simulation, the layered nature of the ore deposits in Pilbara has been replicated, allowing for a more realistic assessment of the considered models’ performance for mining activities. The strengths and limitations of each considered swarm model have been summarized in a spider graph analysis, allowing for identifying the ones best suited for real-world mining applications.
5.1. Mining Efficiency and Operational Performance
Strengthening supply chain operations and boosting profits can be achieved through efficient, high-production mining. In this study, each swarm model’s performance in ore exploration, extraction, and transportation was tested using 5, 10, and 15 robots with 20 randomly distributed blocks. For testing all considered swarm models for mining efficiency and robustness under a consistent and controlled environment, a 15 m by 15 m arena was used for all of swarm models as a standard scenario. Figure 10 shows how each model optimizes mining operations based on efficiency and operational performance.
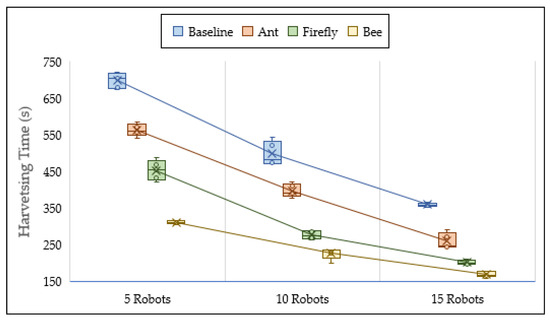
Figure 10.
Efficiency and operational performance of swarm models across varying swarm sizes. The boxes are representing the interquartile range (IQR), the solid line inside the box represents the median, the whiskers represent the data range, the X cross marks the mean (average) value, and the dots represent individual data points.
The honeybee and firefly models have outperformed the ant and baseline models in efficiency. For the case of five robots, the honeybee model completed harvesting in 311 s, making it by 55.4% more efficient than the baseline model’s 698 s. The firefly model completed the same task in 453 s, making it by 35.1% more efficient than the baseline and by 19.5% more efficient than the ant model, which completed the task in 562 s. The baseline model is less efficient due to simultaneous multitasking in exploration, harvesting, and transportation, making it better suited for simpler mining tasks such as surface ore extraction and short-distance mineral transport. The ant model, inspired by leafcutter ants’ division of labor, improves upon the baseline through task specialization among robots. However, without integrated communication in the ant model, a poor performance by a specialized group can cause delays, highlighting the need for synchronized activities to prevent idleness. The firefly model utilizes bioluminescent communication, where a detection robot’s light beam guides the picking robot to the ore. This direct signaling reduces idle time and enhances task coordination and rapid positioning. The honeybee model, inspired by the honeybee’s foraging, has a scout robot that identifies resources and communicates with the master robot, which then coordinates the harvesting robots. This hybrid control system significantly reduces the time required for ore location and extraction, optimizing exploration and harvesting through improved positioning. Overall, the role specialization and direct communication strategies in these models, especially the honeybee model’s hybrid system, can greatly enhance mining efficiency and robustness, particularly in environments requiring precise operations. It worth noting that tests on mining scalability and adaptability simulated for various size environments are presented and discussed under Section 5 of this paper.
5.2. Statistical Analysis
To evaluate significant performance differences between the models, analysis of the variance (ANOVA) test was performed. The results summarized in Table 1 indicate that there is at least one model for which statistically significant differences in harvesting speeds versus the different models have been identified. These differences have operational significance in real-world mining scenarios, as the analysis can evaluate the varying levels of efficiency and suitability for specific tasks.

Table 1.
Statistical analysis via ANOVA test.
To further investigate which specific models differed from one another, the Tukey honestly significant difference (HSD) post hoc tests were performed. Table 2 summarizes the results from the Tukey HSD test, showing the mean differences between each pair of models, as well as their corresponding p-values and confidence intervals.
Table 2.
Statistical analysis via Tukey HSD test.
Statistical analysis showed that there were significant differences in the harvesting speeds of all four swarm models. The efficiency of the honeybee model was superior to the other models thanks to the hybrid control system. The results show that the honeybee model has the shortest harvesting time, mainly because its hybrid control system reduces idle time and maximizes task allocation. This makes the honeybee model particularly effective for real-world scenarios that require high precision and speed, such as for selective mining of high-grade ores, as for hematite in the Pilbara iron ore mine. In these operations, faster harvesting can improve profitability and reduce operating costs through more efficient resource positioning. However, given its slower harvesting speed, the baseline model may be less effective for tasks that must be completed quickly. But in smaller or less dynamic mining operations, where job consistency is more important than the speed, its simplicity may be an advantage. The ant model shows a moderate level of efficiency due to task specialization. This may make it useful in mining environments where ore is concentrated in specific areas, such as vein mining or block caving. Due to its ability to specialize its roles, this model may be useful in mining operations, where different task allocations are advantageous, such as for a vast mining area for transportation. The firefly model’s performance is between the ant and honeybee models. Its bioluminescent communication system provides real-time communication and coordination capabilities that may be well-suited for complex environments such as large open pit mines like the Pilbara iron ore mine, where rapid detection and mining of large areas of ore is critical. Considering the firefly model’s ability to significantly reduce the exploration time, it may be a good choice for operations that require rapid adaptation to changing environments. Thus, the honeybee model is better suited for high-speed and high-precision tasks, while the ant and firefly models are better suited for operations where task specialization and adaptability are critical, as is shown by statistical differences presented in Table 2.
5.3. Mining Scalability and Adaptability
Scalability and adaptability are essential in mining operations due to varying geological structures and mineral deposit distributions, such as dispersed deposits in placer mines and concentrated deposits in vein mines. This study examines the impact of different environment sizes, namely 5 m by 5 m, 15 m by 15 m (the standard scenario), and 30 m by 30 m on the performance of the considered swarm models. To ensure a fair and consistent comparison, each swarm model was tested with a fixed number of 10 robots. Mining environments can vary greatly in size, from small-scale targeted extractions to large open-pit operations. Therefore, further tests have been conducted for three different environment sizes to evaluate the scalability and adaptability of each swarm model in ore exploration, extraction, and transportation under different mining conditions, and they are illustrated in Figure 11.
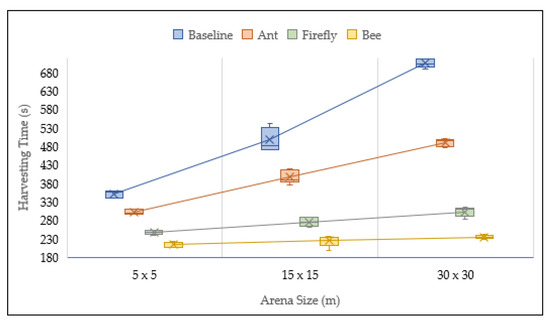
Figure 11.
Scalability and adaptability of swarm models across varying environment sizes. The boxes are representing the interquartile range (IQR), the solid line inside the box represents the median, the whiskers represent the data range, and the X cross marks the mean (average) value.
The performance of the swarm models in three different environment sizes (5 m by 5 m, 15 m by 15 m, and 30 m by 30 m) shows that scalability and efficiency are greatly affected by the size of the site and the communication and control mechanisms of each model. The honeybee model takes 214 s to harvest all 20 blocks in a small site of 5 m by 5 m, while for the baseline model it takes 348 s. The hybrid control system of the honeybee model combines centralized and decentralized functions, which increases its harvesting time by only 10.53% when the environment size increases. The firefly model, which benefits from the beacon system, increases its harvesting time by 22.20%. However, as the environment size increases, the harvesting time of the ant model increases by 60%, and the harvesting time of the baseline model doubles, increasing by 100%, which is mainly due to insufficient coordination and communication.
The efficient exploration and targeted harvesting of the honeybee model, where all robots collaborate in a consensus-driven manner, greatly reduces the exploration time, which is the reason for its excellent performance in various environment sizes. By directing nearby robots to ore blocks, the firefly model’s beacon system effectively reduces missed detections and meaningless exploration rounds, thus overcoming the challenges posed by larger environments. In contrast, the ant model experiences recovery delays even with shorter travel times because its robots are divided into two groups, which increases the search workload and idle time despite a clear division of labor. Since the baseline model has no communication capabilities, each robot must find and collect ore blocks on its own. This increases the number of missed detections and requires more exploration rounds in larger environments. The firefly and honeybee models exhibit more stable and consistent behavior, making them more suitable for large-scale operations such as the Pilbara iron ore mine, while the ant and baseline models exhibit greater performance variation, indicating that they are more susceptible to environmental randomness and communication interruptions. These results suggest that incorporating the honeybee and firefly models into large-scale mining operations may greatly improve ore-processing efficiency, reduce downtime, and increase the overall productivity.
The next study presented in this paper quantitatively assesses the scalability and adaptability of the considered swarm models by evaluating their performance in tasks such as ore exploration, extraction, and transportation under different conditions. These conditions include varying ore blocks levels (from 10 to 30 ore blocks) and different numbers of ore piles (ranging from 1 to 10 piles). To maintain consistency and control in the tests, a 15 m by 15 m arena was chosen as the standard scenario for all models for assessing mining efficiency and robustness. The simulation environment was meticulously designed to replicate diverse mining scenarios, enabling the testing of the optimization and adaptation of the swarm models to these conditions. The results of these scalability and adaptability tests are illustrated in Figure 12.
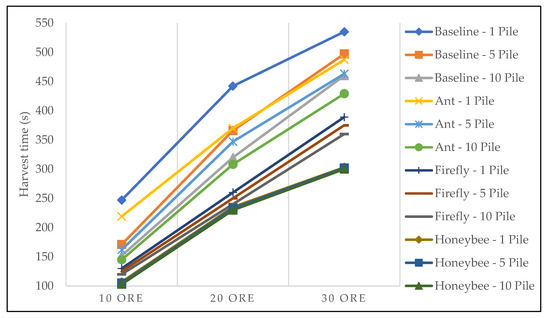
Figure 12.
Swarm mining scalability and adaptability performance from the considered four models for various ore block deposits. (Note: graphs for honeybee model for the cases of 1, 5 and 10 piles are overlapping in the figure).
This section evaluates the mining performance of the four swarm models in terms of scalability and adaptability, focusing on how these models handle varying piles numbers and block distributions. Figure 12 shows that the honeybee model achieves the highest efficiency, improving by 39%, followed by the firefly, ant, and baseline models. All models take longer to mine with 1 pile compared to 10 piles, as more piles reduce exploration time by increasing the chances of finding minerals. However, as the number of blocks increases, so do the mining time and the workload. The baseline model struggles with multitasking, leading to inefficiency. In contrast, the ant, firefly, and honeybee models use role specialization and coordination to minimize idle time and boost productivity. The honeybee model’s performance shows high consistency across different pile configurations, making it adaptable to various mining environments, as can be observed in Figure 12. This model’s strategy of searching the entire area before the coordinated extraction allows it to maintain consistent performance regardless of pile numbers or ore volume. The ant model performs better in environments with fewer, concentrated ore piles, like vein mining, where it efficiently reduces operation time through task division. The firefly model is versatile in handling large ore volumes and maintains performance across different pile numbers, making it suitable for scattered resources in open pits or large-scale mining operations. Overall, the honeybee model stands out for its adaptability and scalability in dynamic and heterogeneous environments, such as placer or alluvial mines with varied deposits, and may be particularly effective in strip mining with irregular ore distribution.
5.4. Mining Reliability and Resilience
Mining operations are often subject to unexpected changes, disturbances, unplanned downtimes, equipment failures, and challenging conditions, making reliability a critical factor. To ensure the effective implementation of swarm models in such environments, it is essential that they continue functioning even in the presence of errors within the swarm. This study evaluates the reliability of the honeybee, ant, and firefly models by simulating error conditions with rates varying from 20% to 80%, as depicted in Figure 13.
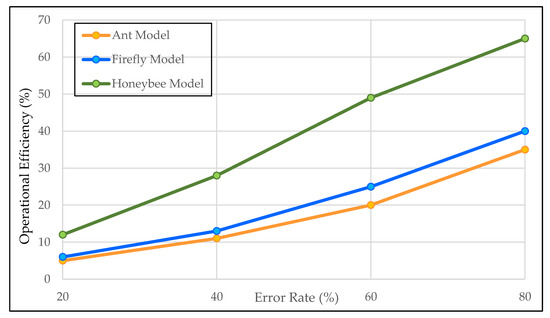
Figure 13.
Swarm models’ operational efficiency drop at different error rates.
The honeybee model, which relies on a master robot for data interpretation and decision-making within a hybrid control system, has demonstrated significant vulnerabilities. As error rates increased, its efficiency sharply declined, with a 65% drop at the 80% error rate, highlighting the risks associated with its centralized control system. A failure in the master robot can lead to the collapse of the entire operation, making the honeybee model less reliable in environments prone to errors, such as space or hazardous mining sites. In contrast, the ant and firefly models employing decentralized control systems, where each agent operates independently, have exhibited a robust performance across all tested error rates. The ant model showed only a 5% efficiency decrease at the 20% error rate, maintaining 65% efficiency even at the 80% error rate. Similarly, the firefly model has demonstrated resilience, with a performance decrease of 6% at the 20% error rate, and of 60% at the 80% error rate. These models’ decentralized nature ensures that the failure of individual robots does not critically impact the overall operations, making them highly adaptable and reliable, particularly in uncertain and challenging environments such as remote, underground, or space mining. The results indicate that while the honeybee model offers efficiency advantages under controlled conditions due to its centralized control, it is highly susceptible to single-point failures at higher error rates. In contrast, the ant and firefly models maintain stable performance despite increasing errors, proving their effectiveness in handling faults and making them more suitable for environments where system robustness is essential. The decentralized control in these models allows for continued operation despite individual failures, offering superior reliability and adaptability compared to the honeybee model.
5.5. Mining Selectivity
Selective mining is a critical approach in the mining industry, focusing on extracting high-quality minerals to maximize profitability and meet market demands. This method prioritizes high-grade ores and leaves low-grade ores behind unless market conditions make their extraction economically viable. In underground mining, room-and-pillar mining typically leaves pillars made up of gangue or low-value material to support the roof while extracting high-grade ores. Similarly, cut-and-fill mining prioritizes high-grade ores, using the extracted gangue or low-grade ores as a backfill material. Longwall mining cuts along the ore seam to extract higher-quality ore, leaving low-grade ores for structural support.
In this study, the implementation of selective mining was evaluated within a swarm model, focusing on tasks like distinguishing between the low-grade ore goethite and high-grade ore hematite blocks during extraction. The experiment involved 10 robots processing 20 randomly dispersed ore blocks with 10 high-grade hematite ore blocks marked in red and 10 low-grade goethite ore blocks marked in green. Each robot was equipped with a LiDAR sensor to detect the color of the ore blocks, allowing them to differentiate between high-grade and low-grade ores based on color. This method is commonly used in swarm robot simulations to test their capabilities, emphasizing the dynamic interactions within swarm models rather than the specific technology used for ore quality detection. The results of these selective mining tests are illustrated in Figure 14.
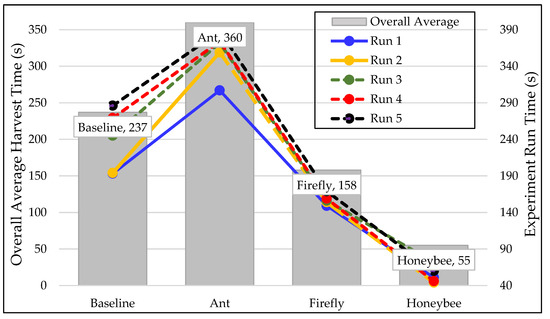
Figure 14.
Swarm-mining reliability performance for the four models.
This section evaluates the precision and accuracy of the swarm models in mining high-grade deposits (hematite ore), focusing on their selective mining protocols. As shown in Figure 14, the honeybee model outperformed the others, with an average selective mining time of 55 s, compared to 158 s, 360 s, and 237 s for the firefly, ant, and baseline models, respectively. The baseline, ant, and firefly models, which use decentralized and behavior-based control, rely on real-time environmental data to reach consensus. However, their selective mining protocols did not significantly improve performance due to limitations in the perception radius, resulting in redundant exploration and wasted effort. Without centralized control, these models lack prior knowledge of high-grade ore locations, leading to longer mining times, increased robot numbers for high-grade ore detection, and reduced efficiency. Decentralized control also causes issues like congestion, inconsistent environmental cues in the firefly model, and workload imbalance in the ant model, where some robots mine low-grade ores while the others search for high-grade ones, leading to inefficient task allocation. The absence of centralized data interpretation and command issuing further exacerbates inefficiency, as robots search without a coordinated strategy. In contrast, the honeybee model uses centralized control, offering distinct advantages for selective mining. Scout robots explore the area and relay ore deposit information to the master robot, which, like an onlooker bee in nature, selectively directs mining robots to high-grade ore locations based on mineral quality and resource data. This centralized approach leverages prior knowledge, eliminating redundant searches and directing robots straight to high-grade ores, significantly improving mining efficiency and profitability. The time-based adjustments according to mineral quality ensure that the honeybee model prioritizes the high-grade ore, making it particularly effective in room-and-pillar mining, where selective extraction is crucial for maintaining structural integrity.
5.6. Overview of Swarm Model Performance
The performance values for the swarm models were determined based on simulation results, with the lowest harvesting time used as a standard metric. The honeybee model, which achieved the shortest harvesting time, was set as the benchmark for efficiency, scalability, and selectivity, with its performance value normalized to 1.0. For instance, the honeybee model took 55 s to complete a selective mining task, so this was set as the highest performance value (1.0). For comparison, the ant model, which took 360 s for the same task, received a performance value of 0.40 calculated as 55/360. This scaling method facilitated a comparative analysis of the models’ performances across various aspects such as efficiency, reliability, selectivity, and scalability. The spider graph presented in Figure 15 visually represents these scaled metrics, highlighting relative strengths and weaknesses of each swarm model.
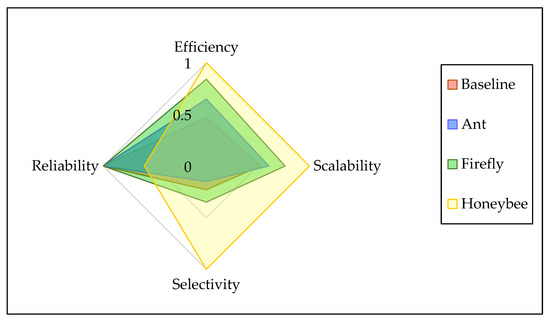
Figure 15.
The performance overview for the four swarm models.
According to the swarm model performances presented in the spider graph analysis in Figure 15, the honeybee model demonstrates superior capabilities in efficiency, scalability, and selectivity. This excellent performance is attributed to its hybrid decentralized-centralized control system, which provides prior knowledge about ore deposits, enhancing mining efficiency and selectivity for precise operations. Additionally, the honeybee model’s performance remains unaffected by environmental changes, as it does not rely on real-time environmental data. In contrast, the baseline, ant, and firefly models exhibit the strongest reliability due to their decentralized control systems. These models ensure that each robot operates independently, so if a robot fails or malfunctions, the overall process continues and is unaffected. Among these three models, the firefly model surpasses the ant model in efficiency, scalability, and selectivity because it incorporates a localization feature, such as a guide light, which optimizes the mining operation in addition to task allocation. To provide a clear overview of each swarm model’s strengths in relation to specific mining tasks, key applications and advantages of each model are summarized in Table 3.
Table 3.
Summary of swarm model applications and strengths.
Table 3 highlights the advantages and strengths of each swarm model in relation to specific mining tasks. The firefly model excels in ore detection, communication, and adaptability, making it ideal for operating in complex environments to achieve efficient exploration. The ant model is particularly strong in ore transportation, offering high reliability and effective task specialization, which ensures continuous operation with minimal interference. The honeybee model, best suited for selective ore mining, combines concentrated precision and dispersed adaptability, making it highly effective in targeting high-grade ore. This classification underscores the importance of aligning swarm models with specific mining tasks to enhance productivity and operational efficiency.
5.7. Performance and Resources Metrics
5.7.1. Computational Load and Communication Efficiency
This section analyzes the communication overhead and computational load associated with each swarm model considered. Areas of focus are operational latency, memory requirements, bandwidth consumption, and CPU utilization monitoring. This analysis aims to investigate the impact of algorithmic and control mechanism complexities on processing and communication requirements. This analysis is on how different control schemes, whether centralized or decentralized, affect the computational and communication efficiency of a swarm. The relationship between computational efficiency and communication overhead have been examined, particularly in the context of large-scale operations where the number of swarm robots must work well together given the network resource constraints, as shown in Figure 16.
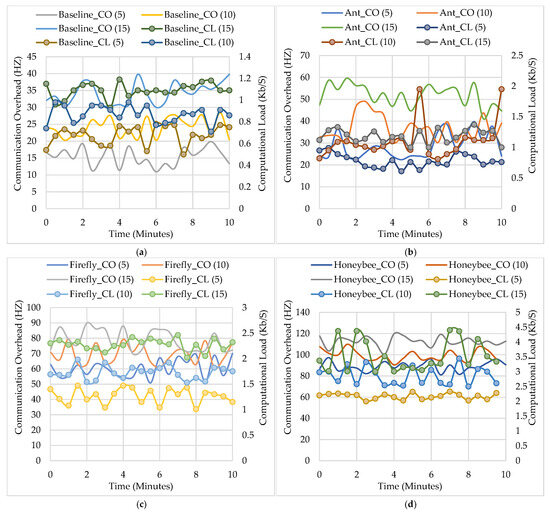
Figure 16.
Communication overhead (CO) in Hz and computational load (CL) in Kb/s for different swarm models. (a) Baseline model, (b) Ant model, (c) Firefly model, (d) Honeybee model, each with 5, 10, and 15 robots over a 10-min period.
The impact of communication overhead, computational load, and the number of robots in a swarm on overall system performance is significant, especially as the number of robots increases from 5 to 15. The honeybee model shows a dramatic increase in both communication overhead and computational load. Compared to the baseline model, the honeybee model experiences a 200% increase in communication overhead and a 300% increase in computational load. This sharp rise is due to the potential bottleneck of the complex hybrid control system, in which the master robot acts as the central coordinator and involves extensive data sharing with the master robot and nearby agents, receiving location data, real-time coordination, and robot recruitment from the master robot. These processes strain the computational resources significantly, making the honeybee model’s system less stable in larger operations compared to decentralized models. The firefly model, while less demanding than the honeybee model, still shows notable increases in communication overhead and computational load by 150% and 167%, respectively, compared to the baseline model. This increase is attributed to the firefly model’s bioluminescence light communication system, where beacon lights are used to recruit neighboring agents. As the number of robots grows, the need to detect and recruit via these light beacons escalates, increasing both communication demands and computational load. In contrast, the ant model exhibits a more moderate increase, with a 100% rise in communication overhead and a 133% rise in computational load compared to the baseline model. This increase is primarily due to the model’s division of labor, where the robot group is split, necessitating twice the number of ore block detections. However, these increases remain manageable, allowing the system to maintain stability even as more robots are added. The baseline model maintains the lowest communication overhead and computational load, thanks to its simple finite state machine (FSM) and model design.
As the number of robots increases, the baseline model shows only a slight rise in communication overhead and computational load, keeping latency low and minimizing strain on CPU resources. The number of robots in a swarm is crucial, as it directly influences system operation. In the honeybee model, adding more robots significantly amplifies communication overhead and computational load, leading to higher operational latency, greater CPU utilization, and increased memory and bandwidth requirements. For instance, in a scenario with 15 robots, the honeybee model fully utilizes 16 CPU cores, drains 15 GB of memory, and even uses an additional 2 GB of swap space due to high computational demands. These factors collectively strain system resources, potentially causing longer simulation run times with a real-time factor of 0.12, ultimately reducing the overall efficiency of the swarm model. The firefly model also demands substantial computational resources, though not to the extent of the honeybee model. The ant and baseline models, however, maintain more manageable resource usage, making them more stable as the number of robots increases. Overall, while the honeybee model excels in efficiency, scalability, and selectivity, its complex control scheme results in extensive computational resource demands. Therefore, selecting the appropriate swarm model based on the specific operational environment and the number of robots involved is crucial, as these factors critically influence the system’s performance and scalability.
5.7.2. Energy Consumption
In this study, the energy consumption of the considered four swarm robot models is evaluated to measure their efficiency in various mining scenarios. To ensure a fair and consistent comparison, uniform assumptions about the energy consumption rates of important tasks across all models has been assumed. Each model is assumed to use 1 joule per second (J/s) when moving, 2 J/s when communicating, 3 J/s when exploring, and 6 J/s when transporting. These numbers are average energy requirements chosen based on the characteristics of the tasks. Specifically, transporting requires more energy due to the need to move the collected ore, while communication consumes less energy for coordination and data exchange. Exploration involves moderate navigation and scanning energy consumption. Energy consumption for the four models is illustrated in Figure 17.
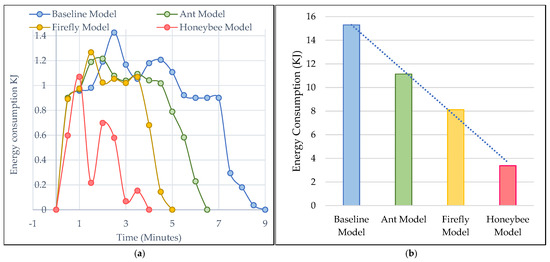
Figure 17.
Energy consumption for the four models in a standard scenario. (a) Energy consumption distribution across time, (b) Total energy consumption comparison. The blue dotted line in (b) represents the energy consumption trend across the models, showing a decrease from the baseline model to the honeybee model.
The four swarm models have different energy consumption patterns, which helps to understand how their control strategies, task allocation, and interaction protocols affect the overall energy distribution. The baseline model accounted for 40.3% of the total energy consumption of all models, with the highest energy consumption of 15.3 KJ. Due to the lack of task allocation, communication, and coordination, each robot is forced to handle exploration and transportation tasks independently, which leads to high energy consumption. Redundant operations caused by an inefficient task management system resulted in higher energy demand. Since each robot uses energy to complete each task, the baseline model consumed more energy and was less efficient than the other models. Of the total energy, the ant model used total energy consumption of 11.14 KJ or 29.4% of the total energy consumption of all models. Since the robots are divided into two groups, this model benefited from the division of labor. The decentralized control mechanism of the ant model ensured that tasks are efficiently allocated, thereby reducing idle time and preventing any group of robots from using too much energy. This made the energy distribution more consistent and stable than for the baseline model, which assumes that tasks such as exploration and transportation are repeated, thus leading to energy inefficiency.
The firefly model used total energy consumption of 8.12 KJ, or 21.4% of the total energy. The necessity of the initial exploration and the activation of the bioluminescent communication system caused its energy consumption to peak at 1 min 45 s. The robots use more energy in this phase, because they communicate with one another by emitting light signals. But when the beacon is activated, the exploration becomes more focused and targeted, minimizing unnecessary searches. Therefore, the energy demand is reduced. This efficient communication mechanism balanced energy consumption by reducing unnecessary actions, which works in the firefly model’s favor once communication is established. The honeybee model was the most energy efficient, with an energy consumption of only 3.38 KJ or 8.9% of the total energy. This model showed a dynamic energy-consumption pattern, with energy consumption peaking in the first minute due to the intensive exploration and communication of the scout robots. Thereafter, around at 1 min 45 s, the recruitment process takes over and energy consumption drops sharply because most robots are waiting for the master robot’s signal and task assignment. Once harvesting begins, energy consumption rises but remains much lower than for the other models. The honeybee model hybrid control system (combining centralized and decentralized elements) ensured efficient energy use by reducing idle time and meaningless operations.
Overall, the division of labor in the ant model allowed for a more even distribution of energy, while the baseline model’s lack of task coordination and communication resulted in the highest energy consumption. The honeybee model had the lowest overall energy consumption due to its dynamic but extremely efficient control system, while the firefly model’s bioluminescent communication system helped to reduce energy consumption after the initial peak. These changes highlight the importance of efficient task management, communication protocols, and control schemes to minimize energy utilization in swarm robotic systems.
5.7.3. CPU Utilization
In this study the CPU utilization of four swarm robot models at different numbers of robots, i.e., 5, 10, and 15, has been tested. The computational requirements of each model have been tested over time, and the number of robots in the swarm have been taken into consideration to judge on how they scale. The tests were designed to determine how the considered different models operate as the swarm size increases, with a particular focus on the impact on CPU utilization, which is a key indicator of computational resources. The CPU utilizations for four swarm models for various swarm sizes are shown in Figure 18.
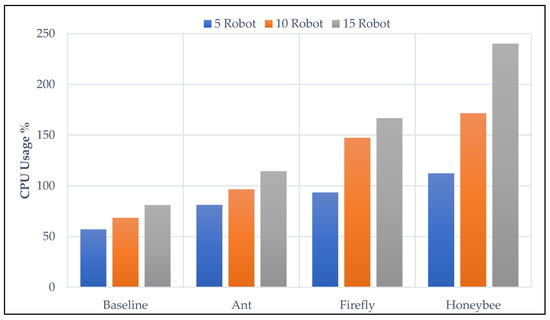
Figure 18.
CPU usage for four swarm models across varying swarm sizes of 5, 10, and 15 robots.
Analysis of CPU utilization for the four swarm models showed that the computational demand greatly increases as the swarm size increases. The baseline model used the least CPU power, ranging from 50% to 87%. This is because its operation is simple and there is little communication between robots, so it can manage computational resources without burdening the system. The ant model had slightly higher CPU utilization, ranging from 75% to 119%, because its division of labor increases task allocation, balances complexity and resource consumption, and remains stable and controllable even under increased demand. The firefly model’s beacon-based communication system required real-time asynchronous signals, which can cause sudden spikes in CPU demand, such as a sudden increase to 171%. As a result, the CPU utilization of this model was more complex and variable, ranging from 56% to 175%. These peaks show that the CPU demand of the firefly model becomes more unpredictable and difficult to control as the swarm size increases, and that swarm robots put pressure on the system when communicating simultaneously. The honeybee model used the highest CPU power, up to 250%, when there are 15 robots. Complex processes such as real-time coordination between the master robot and the other robots, recruiting, data sharing, and exploration lead to bottlenecks that require a lot of processing power, when the number of robots exceeds the system’s processing capacity. If the master robot experiences a high computational load, it can slow down decision-making and introduce delays in the overall operation. This makes the Honeybee model highly resource-intensive and potentially less reliable in scenarios requiring the management of large swarms or complex environments. In cases where processing power or communication bandwidth is limited, the complexity of the hybrid system could reduce the overall system efficiency and stability.
The high communication overhead of the honeybee model increases CPU consumption and compromises system stability, especially in large-scale swarm applications in real-world scenarios. A key component of the model’s effectiveness is its communication method. While the baseline model’s minimal communication achieved low CPU usage and system stability, the firefly and honeybee models rely on more complex communication systems, which resulted in a higher CPU utilization. The firefly model’s beacon-based system added a lot of communication overhead, resulting in unstable CPU requirements, while the honeybee model’s extensive data sharing required powerful computing resources. Due to the increased communication overhead, the CPU usage became more unstable as the swarm size increased, especially in the firefly and honeybee models. This affects the stability of the system. In real-world applications, large swarms may make the system unstable without sufficient processing power. Although the firefly and honeybee models are powerful, they still require careful management of resources to prevent system overload and maintain reliable performance. In summary, since the ant model and the standard model are more resource-efficient and scalable, they are more suitable for environments with limited computing resources. The problem of the firefly and honeybee models highlights the need for swarm robotics systems to balance operational complexity and resource availability, which is attributed to their higher CPU requirements and communication overhead.
5.8. Mining Design Applications
The spider diagram in Figure 15 illustrates the distinct strengths and adaptability of the ant, firefly, and honeybee swarm models in various mining approaches. The ant model, characterized by its task-allocation feature and decentralized control, may be highly reliable in operations where precise targeting is unnecessary, such as placer mining, dredging, and block caving. It may optimize task distribution in hydraulic mining and may be effectively applied in space exploration, including asteroid, planetary, and lunar mining, by enhancing mining efficiency through independent task execution. The firefly model excels in scalability and decentralized control and may be suitable for surface mining methods like open pit and strip mining, where accurate ore positioning is crucial. In underground mining methods such as room-and-pillar, longwall, and stoping, the firefly model’s ore-detection feature may allow for highly targeted mining with high confidence. It may also be effective in space mining, where the model’s ability to operate in harsh conditions with communication challenges becomes advantageous. Lastly, the honeybee model, with its centralized control strategies, may be highly efficient in targeting high-grade ores in both surface and underground mining methods, such as room-and-pillar, longwall, shrinkage stoping, and sublevel stoping. Its advanced communication system may facilitate efficient coordination in selective mining and may be particularly beneficial for specialized techniques like in situ leaching and solution mining, where focusing on high-grade ore areas is critical for maximizing efficiency and profitability. The detailed applications of these models across various mining methods are summarized in Table 4.
Table 4.
Applications of swarm models in terrestrial mining.
6. Future Direction and Real-World Implementation
While the findings from this study provide insight on the potential applications of swarm robots in mining operations, the simulations used also present certain limitations when considering real-world implementation. Future efforts aimed at addressing these issues will focus primarily on transitioning from simulation-based research to physical applications. This will involve real-world validation through small-scale physical testing and a hybrid simulation-real-world approach. In the next stage of this research, small-scale functional prototypes of swarm robots based on the ant, firefly and honeybee models that have been tested in simulation will be built. The testing environments for these prototypes will be controlled and replicated to represent key aspects of a real mining site, such as the distribution of ore differences in the terrain and potential obstacles. In real-world mining environments, several challenges could affect the performance of swarm robots. Imperfect sensors, for example, may not be 100% accurate in detecting ore or navigating complex terrains, as they are in the simulation. Real mining sites might lead to complications such as wheel traction inefficiency, slipping wheels, and difficulties in precise localization. Furthermore, environmental factors like dust and humidity could affect the functionality of sensors and actuators, requiring frequent recalibration and maintenance.
Physical testing will provide important information that is critical to improving algorithms and the model’s ability to adapt to changing situations. Also, a hybrid strategy will be adopted to integrate the data from the real-world testing into the simulation environment to produce a more accurate and dynamic testbed. This hybrid setup will allow to iteratively improve the swarm model and control algorithm by regularly updating the simulation with real data. By simulating a range of dynamic scenarios that may be difficult to replicate in physical testing, such as unexpected failures or variations in ore quality, the robustness of models will be improved. This will ensure the adequate performance of the models in both controlled and uncontrolled situations. This will contribute to further development and validation of the simulation results, ultimately leading to more reliable and efficient swarm robotics solutions for mining applications.
7. Conclusions
This study tests and evaluates the performance of three swarm robot models, namely ant, firefly, and honeybee, specifically in the context of mining operations, including ore detection, transportation, and selective extraction. The results indicate that the honeybee model may be particularly well-suited for operations requiring high precision and selectivity, such as extracting high-grade ores. The ant model, with its high reliability and task specialization, may be the most effective one for ore transportation, ensuring continuous and efficient material handling. The firefly model excels in ore detection, thanks to its robust communication and adaptability, and may be ideal for complex and dynamic environments where real-time feedback is essential. The honeybee model, distinguished by its hybrid control system, may be the optimal choice for selective ore extraction, allowing for precise targeting of high-grade ores and maximizing operational efficiency. However, the honeybee model has a reliability limitation, making it vulnerable under unknown and harsh conditions. Its reliance on centralized control caused significant performance drops in high-error conditions, and future improvements should focus on enhancing its decentralized components to mitigate single-point failures. The ant model, inspired by the leafcutter ants’ task-allocation strategy and decentralized control systems, may be suitable for mining operations where there is no need for selectivity or strict control of the ore grade. It may be particularly well-suited for space mining, where human intervention and maintenance are impossible, and might excel in regolith extraction due to its decentralized control and task-allocation features. The firefly model, motivated by the bioluminescence of fireflies and employing behavior-based decentralized control, surpasses the ant model in terms of efficiency, scalability, and selectivity while also maximizing reliability. In underground mines, the firefly model may be useful for deposit location searches and may be applicable in hazardous or unknown environments, such as toxic gas mining and space mining, where decentralized control of swarm robots may allow for better location tracking, which is crucial when signal transmission may be delayed or non-existent.
This study demonstrates that for the successful application of swarm robots in mining, it is crucial to choose the swarm model that best suits the specific characteristics and requirements of the mining environment under consideration. For example, ant and firefly models involve decentralized control with command signals being sent and may be suitable for space mining where signal transmission is limited, while the honeybee model involves high precision and may be applied in selective mining, room-and-pillar mining, cut-and-fill mining, and in situ leaching, which requires high-precision extraction. The performance evaluation of the considered swarm models suggests that applying the best-suited swarm model may ensure significant improvements in operational efficiency, thereby contributing to more sustainable, automated, and efficient mining methods. Energy-consumption analysis revealed that the honeybee model, despite its computational intensity, was the most energy-efficient due to its optimized task allocation and communication, while the firefly model’s communication system led to increased energy demand as the swarm size grew, though it remained adaptable to diverse mining scenarios. In conclusion, it can be suggested that swarm robotics offers significant potential for mining automation by enhancing efficiency, scalability, and sustainability across a range of operations. The integration of these swarm models into existing automation systems, such as the autonomous haulage systems (AHS) at Pilbara Iron Ore Mine, could provide greater flexibility and cost-effectiveness, particularly for selective mining and exploration tasks. A hybrid approach combining swarm robotics with large-scale bulk ore transport systems might optimize operational efficiency, contributing to a more sustainable and efficient path forward for mining automation. It is recommended that future research focuses on addressing the reliability limitations of the honeybee model by developing solutions to improve its sustainability. Additionally, further development of hybrid models that combine the inherent strengths of existing ones, with enhanced adaptability for various mining environments, should be explored.
Author Contributions
Conceptualization, J.T., N.M., D.H. and R.A.; Methodology, J.T., N.M., D.H. and R.A.; Software, J.T.; Validation, J.T.; Formal analysis, J.T., N.M. and D.H.; Writing—original draft, J.T.; Writing—review & editing, J.T., N.M. and D.H.; Visualization, J.T.; Supervision, N.M., D.H. and R.A.; Project administration, N.M., D.H. and R.A.; Funding acquisition, N.M. All authors have read and agreed to the published version of the manuscript.
Funding
This research received no external funding.
Data Availability Statement
The original contributions presented in the study are included in the article, further inquiries can be directed to the corresponding author.
Acknowledgments
The authors would like to express their gratitude to BHP for providing images from the South Flank mine and granting the permission to use them in this publication, and to Swedish Mining Innovation for providing the mining technology evolution roadmap and granting the permission to use it in this publication.
Conflicts of Interest
The authors declare no conflicts of interest.
References
- Wellmer, F.W.; Buchholz, P.; Gutzmer, J.; Hagelüken, C.; Herzig, P.; Littke, R.; Thauer, R.K. Raw Materials for Future Energy Supply; Springer International Publishing: Cham, Switzerland, 2019. [Google Scholar]
- Government of Western Australia. Western Australia Iron Ore Profile; Government of Western Australia: Perth, Australia, 2019.
- Salisbury, C. Iron Ore—Delivering Value from Flexibility and Optionality; Rio Tinto: London, UK, 2018. [Google Scholar]
- BHP. Automation Data is Making Work Safer, Smarter and Faster; BHP: Melbourne, Australia, 2019. [Google Scholar]
- Jang, H.; Topal, E. Transformation of the Australian mining industry and future prospects. Min. Technol. 2020, 129, 120–134. [Google Scholar] [CrossRef]
- Brambilla, M.; Ferrante, E.; Birattari, M.; Dorigo, M. Swarm robotics: A review from the swarm engineering perspective. Swarm Intell. 2013, 7, 1–41. [Google Scholar] [CrossRef]
- Trianni, V.; IJsselmuiden, J.; Haken, R. The Saga Concept: Swarm Robotics for Agricultural Applications. Technical Report. 2016. Available online: http://laral.istc.cnr.it/saga/wp-content/uploads/2018/02/ITEMS2017-ID11.pdf (accessed on 23 August 2018).
- Thamrin, N.M.; Arshad, N.H.M.; Adnan, R.; Sam, R. Forward Navigation for Autonomous Unmanned Vehicle in Inter-Row Planted Agriculture Field. In Control Engineering in Robotics and Industrial Automation: Malaysian Society for Automatic Control Engineers (MACE) Technical Series; Springer: Berlin/Heidelberg, Germany, 2022; Volume 2018, pp. 183–198. [Google Scholar]
- Mariappan, M.; Arshad, M.R.; Akmeliawati, R.; Chong, C.S. Control Engineering in Robotics and Industrial Automation; Springer International Publishing: Cham, Switzerland, 2022. [Google Scholar]
- Phys.org. Nature-Inspired Soft Millirobot Makes Its Way through Enclosed Spaces. 2018. Available online: https://phys.org/news/2018-01-nature-inspired-soft-millirobot-enclosed-spaces.html (accessed on 1 June 2021).
- Kayser, M.; Cai, L.; Bader, C.; Falcone, S.; Inglessis, N.; Darweesh, B.; Costa, J.; Oxman, N. September. Fiberbots: Design and digital fabrication of tubular structures using robot swarms. In Robotic Fabrication in Architecture, Art and Design; Springer: Cham, Switzerland, 2018; pp. 285–296. [Google Scholar]
- Petersen, K.H.; Nagpal, R.; Werfel, J.K. Termes: An autonomous robotic system for three-dimensional collective construction. In Robotics: Science and systems VII; The MIT Press: Cambridge, MA, USA, 2011. [Google Scholar]
- Sebbane, Y.B. Intelligent Autonomy of UAVs: Advanced Missions and Future Use; CRC Press: Boca Raton, FL, USA, 2018. [Google Scholar]
- Schranz, M.; Umlauft, M.; Sende, M.; Elmenreich, W. Swarm robotic behaviors and current applications. Front. Robot. AI 2020, 7, 36. [Google Scholar] [CrossRef] [PubMed]
- Tan, J.; Melkoumian, N.; Akmeliawati, R.; Harvey, D. Design and application of swarm robotics system using ABCO method for off-Earth mining. In Proceedings of the Fifth International Future Mining Conference 2021, Perth, Australia, 6 December 2021. AusIMM. [Google Scholar]
- Subhan, M.A.; Bhide, A.S.; COEB SSGB. Study of unmanned vehicle (robot) for coal mines. Int. J. Innov. Res. Adv. Eng. 2014, 1, 116–120. [Google Scholar]
- Duarte, M.; Costa, V.; Gomes, J.; Rodrigues, T.; Silva, F.; Oliveira, S.M.; Christensen, A.L. Evolution of collective behaviors for a real swarm of aquatic surface robots. PLoS ONE 2016, 11, e0151834. [Google Scholar] [CrossRef] [PubMed]
- Tan, J.; Melkoumian, N.; Harvey, D.; Akmeliawati, R. Classifying Nature-Inspired Swarm Algorithms for Sustainable Autonomous Mining. Insights Min. Sci. Technol. 2024, 4, 555636. [Google Scholar] [CrossRef]
- St-Onge, D.; Kaufmann, M.; Panerati, J.; Ramtoula, B.; Cao, Y.; Coffey, E.B.; Beltrame, G. Planetary exploration with robot teams: Implementing higher autonomy with swarm intelligence. IEEE Robot. Autom. Mag. 2019, 27, 159–168. [Google Scholar] [CrossRef]
- Nordic Rock Tech Centre. SMIFU WP1, Final Report; Nordic Rock Tech Centre: Oslo, Norway, 2011. [Google Scholar]
- Björkman, B.; Bäckblom, G.; Greberg, J.; Weihed, P. Strategic Research and Innovation Agenda for Swedish Mining and Metal Producing Industry (STRIM), Swedish Mining Innovation. 2013. Available online: https://www.swedishmininginnovation.se/wp-content/uploads/2016/11/STRIM-agenda_2013.pdf (accessed on 14 September 2024).
- Ellem, B. Resource peripheries and neoliberalism: The Pilbara and the remaking of industrial relations in Australia. Aust. Geogr. 2015, 46, 323–337. [Google Scholar] [CrossRef]
- Tinto, R. Rio Tinto. In MarketLine Company Profile; KBC: Brussels, Belgium, 2015; pp. 1–36. [Google Scholar]
- Trott, S. Iron Ore Western Australia, Rio Tinto. 2023. Available online: https://www.riotinto.com/en/operations/australia/iron-ore-western-australia#:~:text=The%20Pilbara%2C%20Western%20Australia,rapidly%20to%20changes%20in%20demand (accessed on 29 August 2024).
- Bearne, G. Innovation in mining: Rio Tinto’s Mine of the Future (TM) programme. Alum. Int. Today 2014, 26, 15. [Google Scholar]
- Leung, R.; Hill, A.J.; Melkumyan, A. Automation and Artificial Intelligence Technology in Surface Mining: A Brief Introduction to Open-Pit Operations in the Pilbara. IEEE Robot. Autom. Mag. 2023, 2–21. [Google Scholar] [CrossRef]
- Duuring, P.; Teitler, Y.; Hagemann, S.G. Banded iron formation-hosted iron ore deposits of the Pilbara Craton. In Australian Ore Deposits; Australasian Institute of Mining and Metallurgy: Carlton, Australia, 2017; pp. 345–350. [Google Scholar]
- Bus, G.D. Pilbara Iron Ore Agreements Processing Obligations and Outcomes. Ph.D. Thesis, Murdoch University, Perth, Australia, 2015. [Google Scholar]
- Murphy, P. Pilbara Iron Ore Agreements Processing Obligations and Outcomes. Doctoral Dissertation, Murdoch University, Perth, Australia, 2015. [Google Scholar]
- Law, W.B.; Slack, M.J.; Ostendorf, B.; Lewis, M.M. Digital terrain analysis reveals new insights into the topographic context of Australian Aboriginal stone arrangements. Archaeol. Prospect. 2017, 24, 169–179. [Google Scholar] [CrossRef]
- Baynes, F.J.; Fookes, P.G.; Kennedy, J.F. The total engineering geology approach applied to railways in the Pilbara, Western Australia. Bull. Eng. Geol. Environ. 2005, 64, 67–94. [Google Scholar] [CrossRef]
- BHP. Surface Mining Operations at South Flank Mine, Pilbara, Image, The University of Adelaide; Reproduced with permission from BHP; BHP: New Delhi, India, 2024. [Google Scholar]
- Gordon, D.M. From division of labor to the collective behavior of social insects. Behav. Ecol. Sociobiol. 2016, 70, 1101–1108. [Google Scholar] [CrossRef] [PubMed]
- Constantino, P.B.; Valentinuzzi, V.S.; Helene, A.F. Division of labor in work shifts by leaf-cutting ants. Sci. Rep. 2021, 11, 8737. [Google Scholar] [CrossRef] [PubMed]
- Di Pietro, V.; Govoni, P.; Chan, K.H.; Oliveira, R.C.; Wenseleers, T.; van den Berg, P. Evolution of self-organised division of labour driven by stigmergy in leaf-cutter ants. Sci. Rep. 2022, 12, 21971. [Google Scholar] [CrossRef] [PubMed]
- Fister, I.; Fister, I., Jr.; Yang, X.S.; Brest, J. A comprehensive review of firefly algorithms. Swarm Evol. Comput. 2013, 13, 34–46. [Google Scholar] [CrossRef]
- Palmieri, N.; Marano, S. Discrete firefly algorithm for recruiting task in a swarm of robots. In Nature-Inspired Computation in Engineering; Springer: Berlin/Heidelberg, Germany, 2016; pp. 133–150. [Google Scholar]
- Karaboga, D.; Gorkemli, B.; Ozturk, C.; Karaboga, N. A comprehensive survey: Artificial bee colony (ABC) algorithm and applications. Artif. Intell. Rev. 2014, 42, 21–57. [Google Scholar] [CrossRef]
- Kiran, M.S. Improved artificial bee colony algorithm for continuous optimization problems. J. Comput. Commun. 2014, 2, 108. [Google Scholar] [CrossRef]
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).