
Open-Source Robotic Study Companion with Multimodal Human–Robot Interaction to Improve the Learning Experience of University Students


Abstract
1. Introduction
- Based on the literature (Section 2), we developed requirements (Section 2.4) for an RSC tailored to the needs of university students and highlight the main design considerations based on the needs of students and educators.
- We designed and implemented the hardware and software for an RSC with multimodal human–robot interaction (Section 3).
- We have documented and released our solution as an open-source hardware project in a public repository on GitHub [36] and invite others to replicate and improve on our solution.
2. Related Works and Requirements
2.1. Teacher & Student Perspectives
2.2. Design and Interaction Modalities of Social Robots
2.3. NLP & GenAI Technologies
2.4. Requirements for the RSC
3. Design and Implementation
3.1. Design
3.2. Bill of Materials
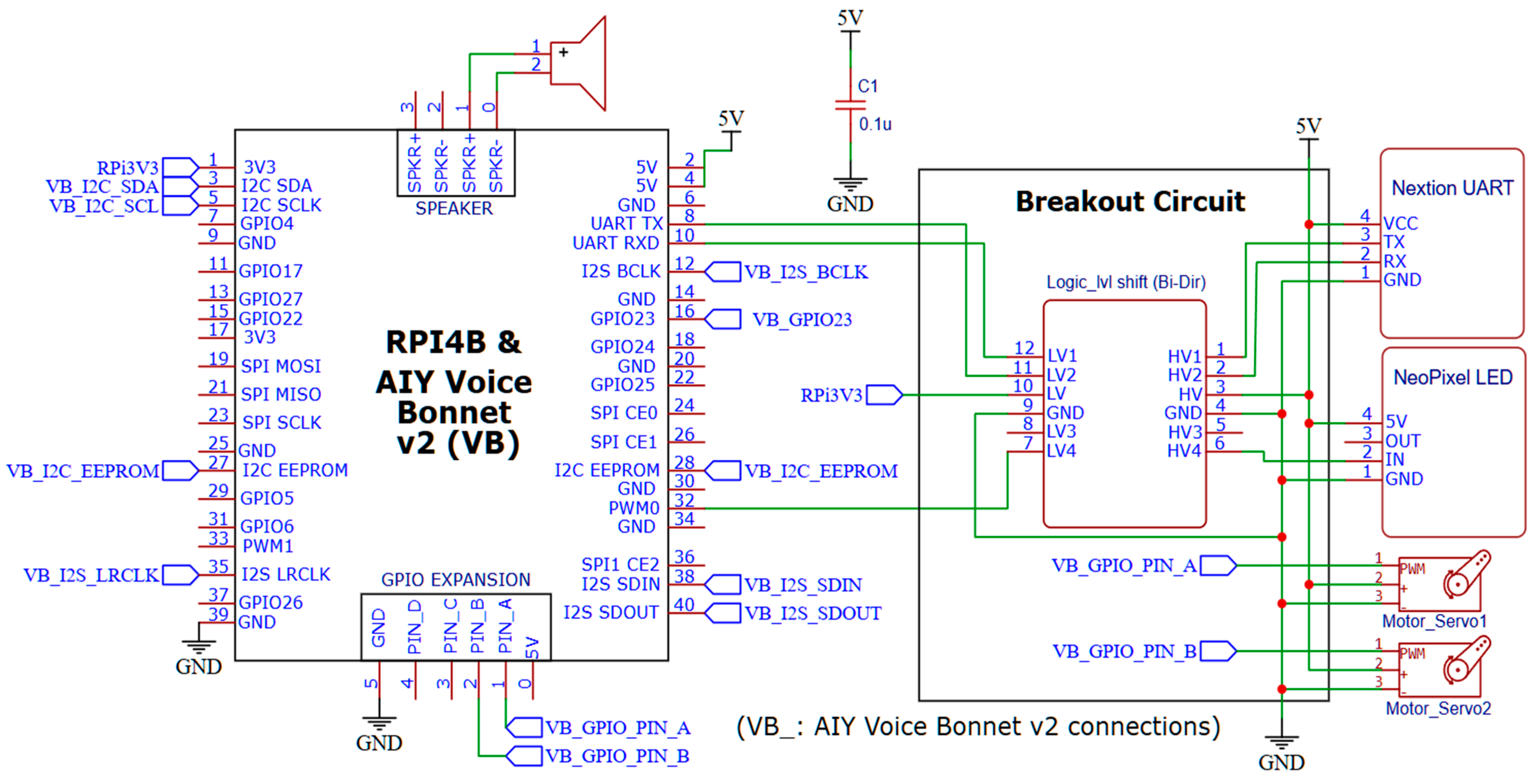
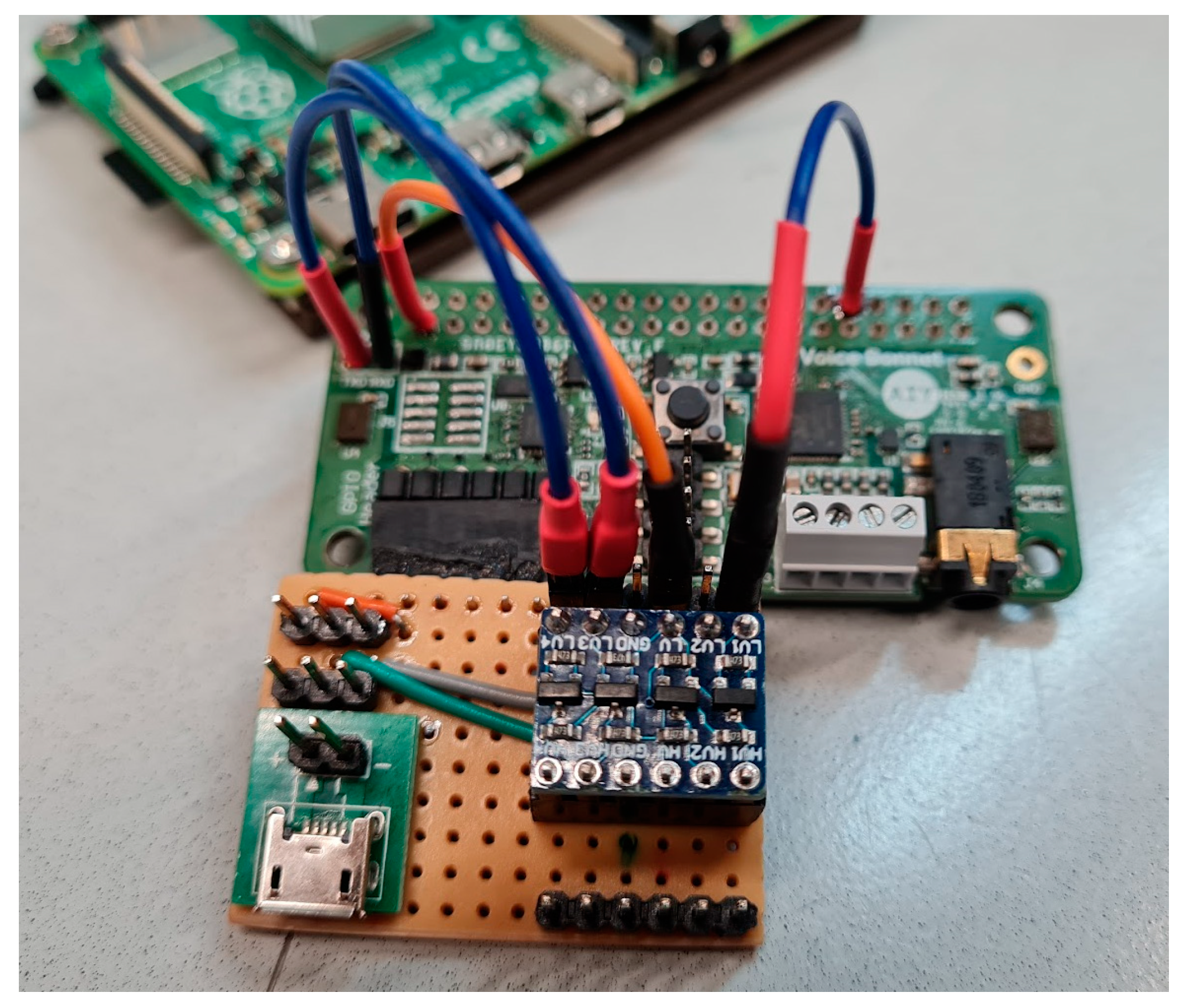
3.3. Electronics
3.4. Software Architecture
4. Results and Discussion
4.1. Requirements Analysis
4.2. Preliminary User Evaluation
4.3. Limitations & Future Work
5. Conclusions
Supplementary Materials
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Ratten, V. The Post COVID-19 Pandemic Era: Changes in Teaching and Learning Methods for Management Educators. Int. J. Manag. Educ. 2023, 21, 100777. [Google Scholar] [CrossRef]
- Song, L.; Singleton, E.S.; Hill, J.R.; Koh, M.H. Improving Online Learning: Student Perceptions of Useful and Challenging Characteristics. Internet High. Educ. 2004, 7, 59–70. [Google Scholar] [CrossRef]
- Xia, Y.; Hu, Y.; Wu, C.; Yang, L.; Lei, M. Challenges of Online Learning amid the COVID-19: College Students’ Perspective. Front. Psychol. 2022, 13, 1037311. [Google Scholar] [CrossRef]
- Al-Mawee, W.; Kwayu, K.M.; Gharaibeh, T. Student’s Perspective on Distance Learning during COVID-19 Pandemic: A Case Study of Western Michigan University, United States. Int. J. Educ. Res. Open 2021, 2, 100080. [Google Scholar] [CrossRef]
- Barrot, J.S.; Llenares, I.I.; del Rosario, L.S. Students’ Online Learning Challenges during the Pandemic and How They Cope with Them: The Case of the Philippines. Educ. Inf. Technol. 2021, 26, 7321–7338. [Google Scholar] [CrossRef]
- Gheshlagh, R.G.; Ahsan, M.; Jafari, M.; Mahmoodi, H. Identifying the Challenges of Online Education from the Perspective of University of Medical Sciences Students in the COVID-19 Pandemic: A Q-Methodology-Based Study. BMC Med. Educ. 2022, 22, 895. [Google Scholar] [CrossRef]
- Jaradat, S.A.; Ajlouni, A.O. Undergraduates’ Perspectives and Challenges of Online Learning during the COVID-19 Pandemic: A Case from the University of Jordan. J. Soc. Stud. Educ. Res. 2021, 12, 149–173. [Google Scholar]
- Ryu, J. Moody Study Buddy: Robotic Lamp That Keeps Students’ Company During the Pandemic. In Proceedings of the Companion of the 2021 ACM/IEEE International Conference on Human-Robot Interaction, Association for Computing Machinery, New York, NY, USA, 8 March 2021; pp. 642–644. [Google Scholar]
- Espinoza, C.; Alamo, A.; Raez, R. AMIGUS: A Robot Companion for Students. In Proceedings of the 2022 17th ACM/IEEE International Conference on Human-Robot Interaction (HRI), Sapporo, Japan, 7–10 March 2022; pp. 669–673. [Google Scholar]
- Van Schoors, R.; Elen, J.; Raes, A.; Depaepe, F. An Overview of 25 Years of Research on Digital Personalised Learning in Primary and Secondary Education: A Systematic Review of Conceptual and Methodological Trends. Br. J. Educ. Technol. 2021, 52, 1798–1822. [Google Scholar] [CrossRef]
- Narciss, S.; Sosnovsky, S.; Schnaubert, L.; Andrès, E.; Eichelmann, A.; Goguadze, G.; Melis, E. Exploring Feedback and Student Characteristics Relevant for Personalizing Feedback Strategies. Comput. Educ. 2014, 71, 56–76. [Google Scholar] [CrossRef]
- Soboleva, E.V.; Zhumakulov, K.K.; Umurkulov, K.P.; Ibragimov, G.I.; Kochneva, L.V.; Timofeeva, M.O. Developing a Personalised Learning Model Based on Interactive Novels to Improve the Quality of Mathematics Education. EURASIA J. Math. Sci. Technol. Educ. 2022, 18, em2078. [Google Scholar] [CrossRef]
- Razek, M.A.; Bardesi, H.J. Towards Adaptive Mobile Learning System. In Proceedings of the 2011 11th International Conference on Hybrid Intelligent Systems (HIS), Melacca, Malaysia, 5–8 December 2011; pp. 493–498. [Google Scholar]
- Ingkavara, T.; Panjaburee, P.; Srisawasdi, N.; Sajjapanroj, S. The Use of a Personalized Learning Approach to Implementing Self-Regulated Online Learning. Comput. Educ. Artif. Intell. 2022, 3, 100086. [Google Scholar] [CrossRef]
- Kabudi, T.; Pappas, I.; Olsen, D.H. AI-Enabled Adaptive Learning Systems: A Systematic Mapping of the Literature. Comput. Educ. Artif. Intell. 2021, 2, 100017. [Google Scholar] [CrossRef]
- Gordon, G.; Spaulding, S.; Westlund, J.K.; Lee, J.J.; Plummer, L.; Martinez, M.; Das, M.; Breazeal, C. Affective Personalization of a Social Robot Tutor for Children’s Second Language Skills. In Proceedings of the AAAI Conference on Artificial Intelligence, Phoenix, AZ, USA, 17 February 2016; Volume 30. [Google Scholar] [CrossRef]
- Leyzberg, D.; Spaulding, S.; Scassellati, B. Personalizing Robot Tutors to Individuals’ Learning Differences. In Proceedings of the 2014 ACM/IEEE International Conference on Human-Robot Interaction, Association for Computing Machinery, New York, NY, USA, 3 March 2014; pp. 423–430. [Google Scholar]
- Leyzberg, D.; Spaulding, S.; Toneva, M.; Scassellati, B. The Physical Presence of a Robot Tutor Increases Cognitive Learning Gains. In Proceedings of the Annual Meeting of the Cognitive Science Society, Sapporo, Japan, 1–4 August 2012. [Google Scholar]
- Hurst, N.; Clabaugh, C.E.; Baynes, R.; Cohn, J.F.; Mitroff, D.; Scherer, S. Social and Emotional Skills Training with Embodied Moxie. arXiv 2020. [Google Scholar] [CrossRef]
- Donnermann, M.; Schaper, P.; Lugrin, B. Integrating a Social Robot in Higher Education—A Field Study. In Proceedings of the 2020 29th IEEE International Conference on Robot and Human Interactive Communication (RO-MAN), Naples, Italy, 31 August–4 September 2020. [Google Scholar]
- Kanero, J.; Geçkin, V.; Oranç, C.; Mamus, E.; Küntay, A.C.; Göksun, T. Social Robots for Early Language Learning: Current Evidence and Future Directions. Child Dev. Perspect. 2018, 12, 146–151. [Google Scholar] [CrossRef]
- Freed, N. Learning French with Sophie—Personal Robots Group. Sophie the Language Learning Companion 2012. Available online: https://robots.media.mit.edu/portfolio/learning-french-sophie/ (accessed on 26 November 2023).
- Balasuriya, S.S.; Sitbon, L.; Brereton, M.; Koplick, S. How Can Social Robots Spark Collaboration and Engagement among People with Intellectual Disability? In Proceedings of the 31st Australian Conference on Human-Computer-Interaction, Fremantle, Australia, 2–5 December 2019; pp. 209–220. [Google Scholar] [CrossRef]
- Papakostas, G.A.; Sidiropoulos, G.K.; Papadopoulou, C.I.; Vrochidou, E.; Kaburlasos, V.G.; Papadopoulou, M.T.; Holeva, V.; Nikopoulou, V.-A.; Dalivigkas, N. Social Robots in Special Education: A Systematic Review. Electronics 2021, 10, 1398. [Google Scholar] [CrossRef]
- Why Do Children with Autism Learn Better from Robots? Available online: https://luxai.com/blog/why-children-with-autism-learn-better-from-robots/ (accessed on 28 May 2023).
- Mahdi, H.; Akgun, S.A.; Saleh, S.; Dautenhahn, K. A Survey on the Design and Evolution of Social Robots—Past, Present and Future. Robot. Auton. Syst. 2022, 156, 104193. [Google Scholar] [CrossRef]
- Reich-Stiebert, N.; Eyssel, F.; Hohnemann, C. Exploring University Students’ Preferences for Educational Robot Design by Means of a User-Centered Design Approach. Int. J. Soc. Robot. 2020, 12, 227–237. [Google Scholar] [CrossRef]
- Ferguson, M.; Webb, N.; Strzalkowski, T. Nelson: A Low-Cost Social Robot for Research and Education. In Proceedings of the 42nd ACM Technical Symposium on Computer Science Education, Association for Computing Machinery, New York, NY, USA, 9 March 2011; pp. 225–230. [Google Scholar]
- Heradio, R.; Chacon, J.; Vargas, H.; Galan, D.; Saenz, J.; De La Torre, L.; Dormido, S. Open-Source Hardware in Education: A Systematic Mapping Study. IEEE Access 2018, 6, 72094–72103. [Google Scholar] [CrossRef]
- Oellermann, M.; Jolles, J.W.; Ortiz, D.; Seabra, R.; Wenzel, T.; Wilson, H.; Tanner, R.L. Open Hardware in Science: The Benefits of Open Electronics. Integr. Comp. Biol. 2022, 62, 1061–1075. [Google Scholar] [CrossRef]
- Kędzierski, J.; Kaczmarek, P.; Dziergwa, M.; Tchoń, K. Design for a Robotic Companion. Int. J. Humanoid Robot. 2015, 12, 1550007. [Google Scholar] [CrossRef]
- A Social Robot Reading Partner for Explorative Guidance. Available online: https://dl.acm.org/doi/epdf/10.1145/3568162.3576968 (accessed on 22 May 2024).
- Yun, H.; Fortenbacher, A.; Pinkwart, N. Improving a Mobile Learning Companion for Self-Regulated Learning Using Sensors. In Proceedings of the 9th International Conference on Computer Supported Education, SCITEPRESS—Science and Technology Publications, Porto, Portugal, 21–23 April 2017; pp. 531–536. [Google Scholar]
- Serholt, S.; Barendregt, W.; Leite, I.; Hastie, H.; Jones, A.; Paiva, A.; Vasalou, A.; Castellano, G. Teachers’ Views on the Use of Empathic Robotic Tutors in the Classroom. In Proceedings of the 23rd IEEE International Symposium on Robot and Human Interactive Communication, Edinburgh, UK, 25–29 August 2014; Volume 2014. [Google Scholar]
- Ceha, J.; Law, E.; Kulić, D.; Oudeyer, P.-Y.; Roy, D. Identifying Functions and Behaviours of Social Robots for In-Class Learning Activities: Teachers’ Perspective. Int. J. Soc. Robot. 2022, 14, 747–761. [Google Scholar] [CrossRef]
- Baksh, F. RobotStudyCompanion/RSC2023: Replication Package for RSC (Robotic Study Companion) v1 (2023). Available online: https://github.com/RobotStudyCompanion/RSC2023 (accessed on 24 May 2024).
- Belpaeme, T.; Kennedy, J.; Ramachandran, A.; Scassellati, B.; Tanaka, F. Social Robots for Education: A Review. Sci. Robot. 2018, 3, eaat5954. [Google Scholar] [CrossRef] [PubMed]
- Brock, H.; Ponce Chulani, J.; Merino, L.; Szapiro, D.; Gomez, R. Developing a Lightweight Rock-Paper-Scissors Framework for Human-Robot Collaborative Gaming. IEEE Access 2020, 8, 202958–202968. [Google Scholar] [CrossRef]
- ABii’s World by Van Robotics. Available online: https://www.smartrobottutor.com (accessed on 8 May 2023).
- Breazeal, C.; Dautenhahn, K.; Kanda, T. Social Robotics. In Springer Handbook of Robotics; Siciliano, B., Khatib, O., Eds.; Springer Handbooks; Springer International Publishing: Cham, Switzerland, 2016; pp. 1935–1972. ISBN 978-3-319-32552-1. [Google Scholar]
- Reich-Stiebert, N.; Eyssel, F. Robots in the Classroom: What Teachers Think About Teaching and Learning with Education Robots. In Proceedings of the Social Robotics; Agah, A., Cabibihan, J.-J., Howard, A.M., Salichs, M.A., He, H., Eds.; Springer International Publishing: Cham, Switzerland, 2016; pp. 671–680. [Google Scholar]
- Vaudel, C. NAO Robot V5 Open Box Edition for Schools. Available online: https://www.robotlab.com/store/naov5-open-box-edition (accessed on 14 May 2023).
- Reich-Stiebert, N.; Eyssel, F. Learning with Educational Companion Robots? Toward Attitudes on Education Robots, Predictors of Attitudes, and Application Potentials for Education Robots. Int. J. Soc. Robot. 2015, 7, 875–888. [Google Scholar] [CrossRef]
- Ewijk, G.; Smakman, M.; Konijn, E. Teachers’ Perspectives on Social Robots in Education: An Exploratory Case Study. In Proceedings of the Interaction Design and Children Conference, London, UK, 17–24 June 2020; Volume 280. [Google Scholar] [CrossRef]
- Kennedy, J.; Lemaignan, S.; Belpaeme, T. The Cautious Attitude of Teachers Towards Social Robots in Schools. In Proceedings of the Robots 4 Learning Workshop at RO-MAN 2016, New York, NY, USA, 26–31 August 2016. [Google Scholar]
- Han, J.; Hyun, E.; Kim, M.; Cho, H.-K.; Kanda, T.; Nomura, T. The Cross-Cultural Acceptance of Tutoring Robots with Augmented Reality Services. JDCTA 2009, 3, 95–102. [Google Scholar] [CrossRef]
- JIBO—By DESIGN TEAM/HUGE DESIGN/Core77 Design Awards. Available online: https://designawards.core77.com/home/award_permalink?id=34998&category_id=1 (accessed on 27 April 2023).
- Yeung, G.; Bailey, A.L.; Afshan, A.; Tinkler, M.; Perez, M.Q.; Pogossian, A.A.; Spaulding, S.; Park, H.W.; Muco, M.; Breazeal, C. A Robotic Interface for the Administration of Language, Literacy, and Speech Pathology Assessments for Children. In Proceedings of the 8th ISCA Workshop on Speech and Language Technology in Education, Graz, Austria, 20–21 September 2019; pp. 41–42. [Google Scholar]
- Carman, A. Jibo, the Social Robot That Was Supposed to Die, Is Getting a Second Life. Available online: https://www.theverge.com/2020/7/23/21325644/jibo-social-robot-ntt-disruptionfunding (accessed on 27 April 2023).
- Haru: An Experimental Social Robot From Honda Research—IEEE Spectrum. Available online: https://spectrum.ieee.org/haru-an-experimental-social-robot-from-honda-research (accessed on 7 May 2023).
- Gomez, R.; Szapiro, D.; Galindo, K.; Nakamura, K. Haru: Hardware Design of an Experimental Tabletop Robot Assistant. In Proceedings of the 2018 ACM/IEEE International Conference on Human-Robot Interaction, Chicago, IL, USA, 26 February 2018; pp. 233–240. [Google Scholar]
- Meet Haru, the Unassuming Big-Eyed Robot Helping Researchers Study Social Robotics—IEEE Spectrum. Available online: https://spectrum.ieee.org/honda-research-institute-haru-social-robot (accessed on 26 February 2023).
- The World’s First AI Robot for Kids Aged 5–10. Available online: https://moxierobot.com/ (accessed on 24 April 2024).
- Ziouzios, D.; Chatzisavvas, A.; Baras, N.; Kapris, G.; Dasygenis, M. An Emotional Intelligent Robot for Primary Education: The Software Development. In Proceedings of the 2021 6th South-East Europe Design Automation, Computer Engineering, Computer Networks and Social Media Conference (SEEDA-CECNSM), Preveza, Greece, 24–26 September 2021; pp. 1–4. [Google Scholar]
- Ahmad, M.I.; Khordi-moodi, M.; Lohan, K.S. Social Robot for STEM Education. In Proceedings of the Companion of the 2020 ACM/IEEE International Conference on Human-Robot Interaction, Association for Computing Machinery, New York, NY, USA, 1 April 2020; pp. 90–92. [Google Scholar]
- Peng, Z.-H. ElectronBot: Mini Desktop Robot 2023. Available online: https://github.com/peng-zhihui/ElectronBot (accessed on 20 May 2023).
- Mira the Baby Robot—Background Research—16-223 Work. Available online: https://courses.ideate.cmu.edu/16-223/f2018/work/2018/09/12/mira-the-baby-robot-background-research/ (accessed on 1 May 2023).
- Marco Mira the Robot Waits for You to Smile. Available online: https://www.personalrobots.biz/mira-the-robot-waits-for-you-to-smile/ (accessed on 1 May 2023).
- Eilik. Available online: https://store.energizelab.com/products/eilik (accessed on 1 May 2023).
- World, S. ElliQ Is an Emotionally Intelligent, Intuitive Robot Sidekick for the Ageing. Available online: https://www.stirworld.com/see-features-elliq-is-an-emotionally-intelligent-intuitive-robot-sidekick-for-the-ageing (accessed on 1 May 2023).
- ElliQ. The Sidekick for Healthier, Happier Aging. Available online: https://elliq.com/ (accessed on 1 May 2023).
- Caudwell, C.; Lacey, C.; Sandoval, E.B. The (Ir)Relevance of Robot Cuteness: An Exploratory Study of Emotionally Durable Robot Design. In Proceedings of the 31st Australian Conference on Human-Computer-Interaction, Association for Computing Machinery, New York, NY, USA, 10 January 2020; pp. 64–72. [Google Scholar]
- Cozmo vs Vector—5 Differences between Them, and Which One Is Better. The Answer Might Surprise You!—What Is the Difference between the Two? Available online: https://ankicozmorobot.com/cozmo-vs-vector/ (accessed on 1 May 2023).
- Fadelli, I.; Xplore, T. A Robotic Planner That Responds to Natural Language Commands. Available online: https://techxplore.com/news/2020-03-robotic-planner-natural-language.html (accessed on 22 December 2022).
- Albornoz-De Luise, R.S.; Arnau-González, P.; Arevalillo-Herráez, M. Conversational Agent Design for Algebra Tutoring. In Proceedings of the 2022 IEEE International Conference on Systems, Man, and Cybernetics (SMC), Prague, Czech Republic, 9–12 October 2022; pp. 604–609. [Google Scholar]
- Katchapakirin, K.; Anutariya, C. An Architectural Design of ScratchThAI: A Conversational Agent for Computational Thinking Development Using Scratch. In Proceedings of the 10th International Conference on Advances in Information Technology, Association for Computing Machinery, New York, NY, USA, 10 December 2018; pp. 1–7. [Google Scholar]
- Axios Login: Khan’s AI Tutor. Available online: https://www.axios.com/newsletters/axios-login/ (accessed on 15 May 2023).
- Voice Kit from Google. Available online: https://aiyprojects.withgoogle.com/voice/ (accessed on 2 May 2023).
- Lin, P.-C.; Yankson, B.; Chauhan, V.; Tsukada, M. Building a Speech Recognition System with Privacy Identification Information Based on Google Voice for Social Robots. J. Supercomput. 2022, 78, 15060–15088. [Google Scholar] [CrossRef]
- Brown, T.B.; Mann, B.; Ryder, N.; Subbiah, M.; Kaplan, J.; Dhariwal, P.; Neelakantan, A.; Shyam, P.; Sastry, G.; Askell, A.; et al. Language Models Are Few-Shot Learners. arXiv 2020. [CrossRef]
- Williams, T.; Matuszek, C.; Mead, R.; Depalma, N. Scarecrows in Oz: The Use of Large Language Models in HRI. ACM Trans. Hum.-Robot. Interact. 2024, 13, 1–11. [Google Scholar] [CrossRef]
- Wang, C.; Hasler, S.; Tanneberg, D.; Ocker, F.; Joublin, F.; Ceravola, A.; Deigmoeller, J.; Gienger, M. LaMI: Large Language Models for Multi-Modal Human-Robot Interaction. arXiv 2024. [Google Scholar] [CrossRef]
- Understanding Large-Language Model (LLM)-Powered Human-Robot Interaction. Available online: https://dl.acm.org/doi/epdf/10.1145/3610977.3634966 (accessed on 29 April 2024).
- Theory of Mind Abilities of Large Language Models in Human-Robot Interaction: An Illusion? Available online: https://dl.acm.org/doi/epdf/10.1145/3610978.3640767 (accessed on 29 April 2024).
- Loos, E.; Gröpler, J.; Goudeau, M.-L.S. Using ChatGPT in Education: Human Reflection on ChatGPT’s Self-Reflection. Societies 2023, 13, 196. [Google Scholar] [CrossRef]
- Liberman-Pincu, E.; Parmet, Y.; Oron-Gilad, T. Judging a Socially Assistive Robot by Its Cover: The Effect of Body Structure, Outline, and Color on Users’ Perception. ACM Trans. Hum.-Robot. Interact. 2023, 12, 23. [Google Scholar] [CrossRef]
- vom Brocke, J.; Hevner, A.; Maedche, A. Introduction to Design Science Research. In Design Science Research: Cases; Springer: Berlin/Heidelberg, Germany, 2020; pp. 1–13. ISBN 978-3-030-46780-7. [Google Scholar]
- Baksh, F.; Zorec, M. RobotStudyCompanion-RSC2023-Replication-Package; Zenodo: Geneva, Switzerland, 2024. [Google Scholar] [CrossRef]
- Voice Kit Overview—Documentation. Available online: https://aiyprojects.readthedocs.io/en/latest/voice.html#voice-bonnet-voice-kit-v2 (accessed on 6 May 2023).
- AIY Voice Bonnet at Raspberry Pi GPIO Pinout. Available online: https://pinout.xyz/pinout/aiy_voice_bonnet (accessed on 6 May 2023).
- AIY Projects—Github Repo. Available online: https://github.com/google/aiyprojects-raspbian (accessed on 20 May 2023).
- Buy a Raspberry Pi 4 Model B. Available online: https://www.raspberrypi.com/products/raspberry-pi-4-model-b/ (accessed on 6 May 2023).
- Nextion NX3224T024. Available online: https://nextion.tech/datasheets/nx3224t024/ (accessed on 6 May 2023).
- Adafruit NeoPixel Ring—16 × 5050 RGB LED with Integrated Drivers. Available online: https://www.adafruit.com/product/1463 (accessed on 6 May 2023).
- DFRobot DF9GMS 360 Degree Micro Servo (1.6 Kg). Available online: https://core-electronics.com.au/towerpro-sg90c-360-degree-micro-servo-1-6kg.html (accessed on 6 May 2023).
- Pololu—Logic Level Shifter, 4-Channel, Bidirectional. Available online: https://www.pololu.com/product/2595 (accessed on 6 May 2023).
- Releases Google/Aiyprojects-Raspbian. Available online: https://github.com/google/aiyprojects-raspbian/releases (accessed on 20 May 2023).
- Models|GPT-3.5. Available online: https://platform.openai.com (accessed on 15 May 2023).
- OPENAI. OpenAI Python Library. Available online: https://github.com/openai/openai-python (accessed on 20 May 2023).
- Python Release Python 3.7.3. Available online: https://www.python.org/downloads/release/python-373/ (accessed on 20 May 2023).
- Pham, H. PyAudio: Cross-Platform Audio I/O with PortAudio. Available online: https://people.csail.mit.edu/hubert/pyaudio/ (accessed on 20 May 2023).
- SpeechRecognition—Github. Available online: https://github.com/Uberi/speech_recognition#readme (accessed on 20 May 2023).
- Bhat, N. Pyttsx3: Text to Speech (TTS) Library for Python 2 and 3. Available online: https://github.com/nateshmbhat/pyttsx3 (accessed on 20 May 2023).
- CircuitPython Essentials. Available online: https://learn.adafruit.com/circuitpython-essentials/circuitpython-neopixel (accessed on 20 May 2023).
- Baksh, F.; Zorec, M. RSC2023 Demo Videos; Zenodo: Geneva, Switzerland, 2023. [Google Scholar] [CrossRef]
- Al-Adwan, A.S.; Li, N.; Al-Adwan, A.; Abbasi, G.A.; Albelbisi, N.A.; Habibi, A. Extending the Technology Acceptance Model (TAM) to Predict University Students’ Intentions to Use Metaverse-Based Learning Platforms. Educ. Inf. Technol. 2023, 28, 15381–15413. [Google Scholar] [CrossRef] [PubMed]
- Feng, G.C.; Su, X.; Lin, Z.; He, Y.; Luo, N.; Zhang, Y. Determinants of Technology Acceptance: Two Model-Based Meta-Analytic Reviews. J. Mass Commun. Q. 2021, 98, 83–104. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| ID | Requirement | Rationale |
|---|---|---|
| Req 1 | The RSC shall support multimodal Social Interaction. | To ensure diverse, context-aware social interactions and support positive academic results, the RSC should facilitate multimodal communication, primarily through speech [26,27], with additional support for touch, gestures, and visual cues [27]. |
| Req 2 | The Design of the RSC will be User-Centred. | The design of the RSC should be compact and aesthetically pleasing, with a size range between 6 cm and 30 cm. It should feature neutral colours and curves to enhance portability, visual appeal, and ease of handling [41], with a machine-like aesthetic [27,76]. The RSC should be accessible, user-friendly, offering adjustable settings and clear, engaging conversations, aiming to improve social interaction and user satisfaction in various study settings (such as individuals or small groups) [20,41], providing support for learners in diverse educational contexts [37]. The RSC should support and promote the customisation of peripherals, extending available interaction modalities to accommodate various learning styles and user preferences. This flexibility may address university student preferences [27] regarding personalisation options, which may improve learning outcomes [20]. |
| Req 3 | The RSC should be Obtainable. | The RSC’s software, hardware, and documentation should be open-source, and the hardware should be made with readily available parts that are not cost-prohibitive [29,30,41]. |
| Req 4 | The RSC should provide Adaptable Learning Support. | The RSC should analyse student performance, adjust responses based on learning styles, recommend customised study plans, and apply gamification to boost motivation. This approach may enhance engagement and support individual learning needs in diverse educational contexts [17,20,33,37,41]. The RSC should personalise learning in line with students’ and teachers’ perspectives [17,20,27,41]. The RSC should support a variety of subjects or courses to provide host academic institutions curricula or programs [20,43]. |
| Req 5 | The RSC should be Reliable. | The RSC should be performant, delivering high interaction quality by enabling low latency replies to user queries. The RSC should reduce frustration [20,27] with a responsive, robust interface and support long system uptimes without interruptions. The RSC should require minimal specialised expertise to maintain and should feature up-to-date documentation. A low-upkeep approach enhances the user experience and ensures a reliable system [20,33,41]. |
| Req 6 | The RSC must be Secure. | The RSC must safeguard user privacy and confidentiality [27,44]. Peer-reviewed threat models and associated security updates should maintain continuous security monitoring with regular updates. |
| Hardware Name | RSC—Robot Study Companion |
|---|---|
| Subject area | Educational tools and open-source alternatives to existing infrastructure |
| Open-source license | CERN-OHL-S-2.0 |
| OSHWA certification | EE000003 * |
| Cost of hardware | ~€240 |
| Project repository | https://github.com/RobotStudyCompanion/RSC2023 (accessed on 25 May 2024) |
| Source files | https://doi.org/10.5281/zenodo.11962698 (accessed on 18 June 2024) |
| Interaction | Description |
|---|---|
| Speech | Employing a speaker and microphones to recognise and respond to audio queries. The RSC uses Speech-to-Text (STT) software to capture user speech and Text-to-Speech (TTS), with a language model generating responses. |
| Gesture | The RSC can communicate using gestures by rotating the flippers, expressing responsiveness. This indicates the RSC is ready to engage; for example, it may greet the student with a waving gesture. |
| Tactile | The top-mounted arcade button provides a direct touch interaction. Pressing it can, for example, start a conversation, which may foster a sense of privacy. |
| Touchscreen | The RSC includes a touch display for adjusting settings and showing information. |
| Light | An RBG LED ring maps colours to device states such as loading, conversing, or an error state. |
| Sound | Audio cues convey internal device states by providing an audible speaker and microphone test. |
| Construction Part | File Name | File Format |
|---|---|---|
| Rear panel | back_panel | STEP, 3MF, F3Z |
| Flipper | rsc_flipper | STEP, 3MF, F3Z |
| Front panel | LCD_panel | STEP, 3MF, F3Z |
| Lid | button_neopx_panel | STEP, 3MF, F3Z |
| Pi bracket | Pi_bracket_panel | STEP, 3MF, F3Z |
| Speaker base | speaker_base | STEP, 3MF, F3Z |
| Component | Description | Cost [EUR] |
|---|---|---|
| USB-C Power Supply | 15 W 5.1 V USB-C power supply | 10 |
| Raspberry Pi 4B 4 GB | Quad-core CPU compute SBC. All-round I/O options. | 55 |
| AIY Voice Kit * | Microphone: SPH1642HT5H-1 | 60 * |
| AIY Voice Bonnet v2 HAT | Supports far-field voice recognition and extends RPi GPIO I/O. | |
| Arcade Button | LED Button provides user-friendly interaction. | |
| Speaker | NH 4ohm 3 W 76 mm Connects to the AIY Voice Bonnet. | |
| Micro SD Card | Capacity: 32 GB UHS Speed Class: 3, Video Speed Class: V30 Application Speed Class: A1, Speed Class: Class 10 | 9 |
| 2x SG90 Servo | Basic flipper movement. Connected to the voice bonnet via GPIO pins. | 16 |
| NeoPixel Ring 16 × 5050 RGB LED | Features 16 individually addressable LEDs. Offers aesthetic illumination, visual indication, and mood lighting. Connected to RPi and controlled with PWM. | 10 |
| Touch Display | Nextion Enhanced NX3224T024 2.4” HMI 320 × 240 Touch Display Equipped with a microcontroller and internal memory. Enhances touch modality and displays menus. Connects to RPi, controlled via UART. | 53 |
| Logic Level Shifter | 4-Channel, Bidirectional; translates voltage logic level signals: 5 V (peripherals) to 3.3 V (RPi). Allows RPi to communicate with peripherals. | 3 |
| 3D Printing Filament | White & Blue PLA and White TPU | 20 |
| ID | Requirement | Review of Outcomes |
|---|---|---|
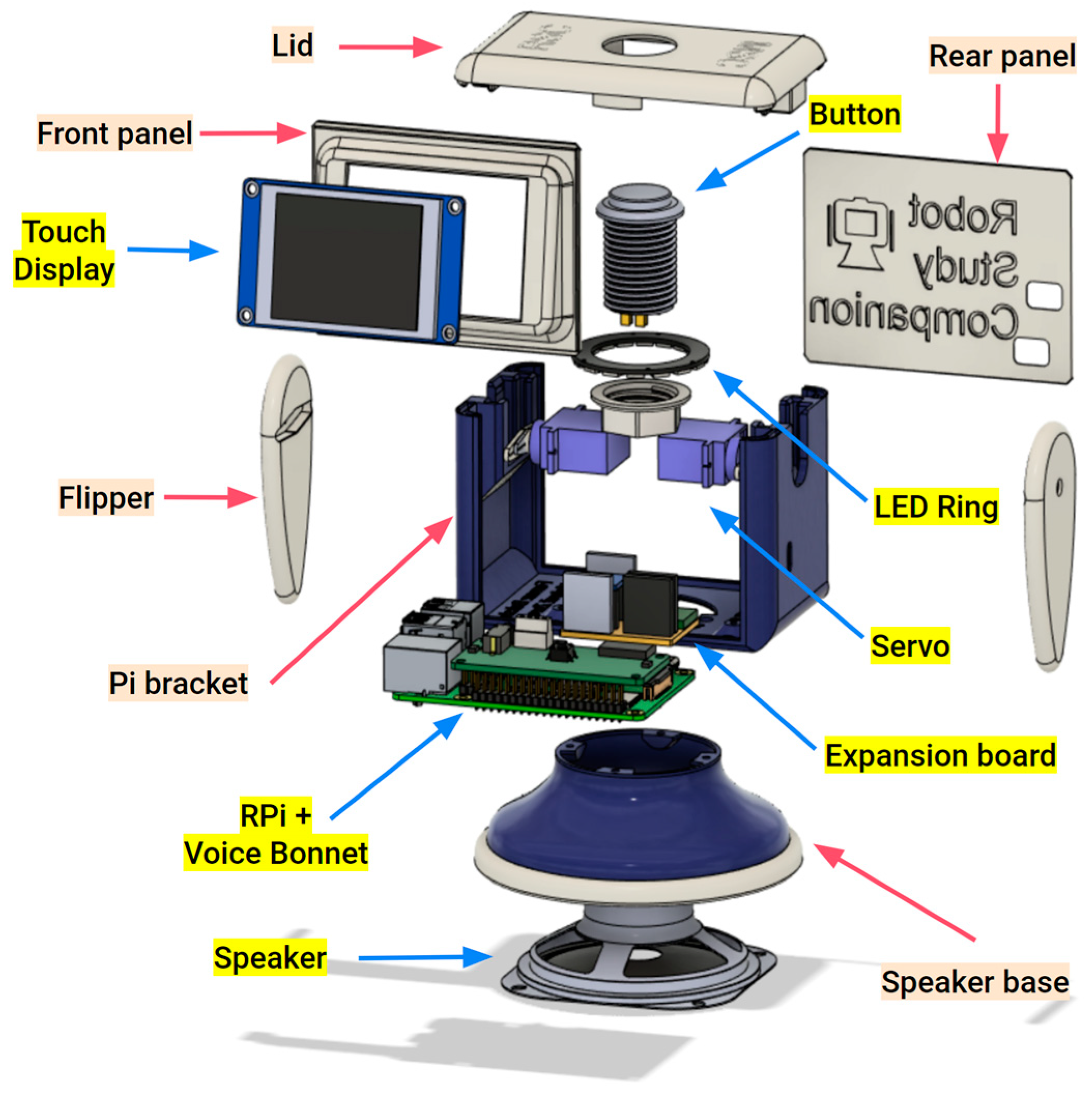
| Req 1 | The RSC shall support multimodal Social Interaction. | The RSC combines electronics and software to enable multimodal social interaction (Table 3, video demo [95]). The prototype can listen and reply to student voice commands using the AIY voice bonnet microphones and speaker. It can interpret and respond to commands using the open-source, permissively licensed Python speech-recognition library and the OpenAI GPT-3 remote API (deprecated as of January 2024). The NeoPixel LED ring provides visual cues like status updates, and the arcade button offers basic tactile interaction. Meanwhile, the touch display shows runtime information and displays a convenient settings menu. Finally, the servos enable simple gestures, such as ‘waving hello’ during startup. These integrated technologies enable diverse interactions for students with different learning styles. |
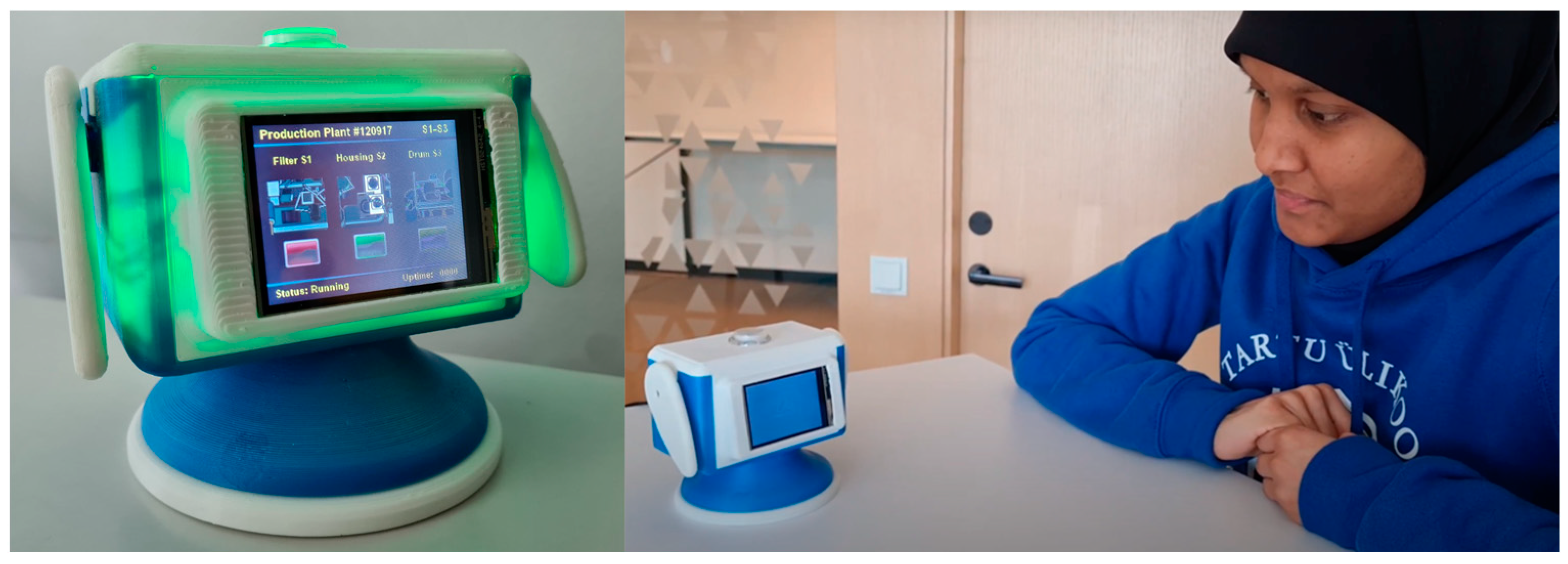
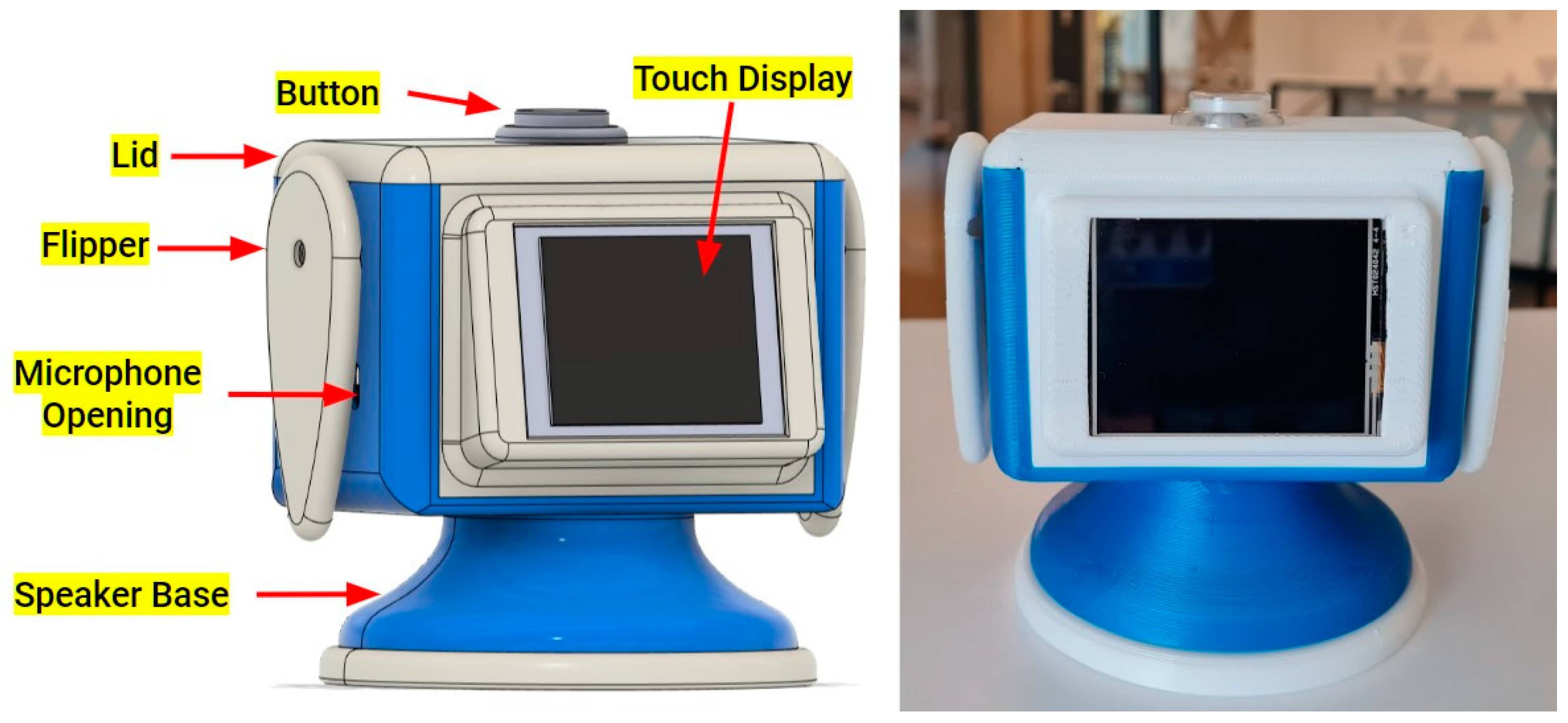
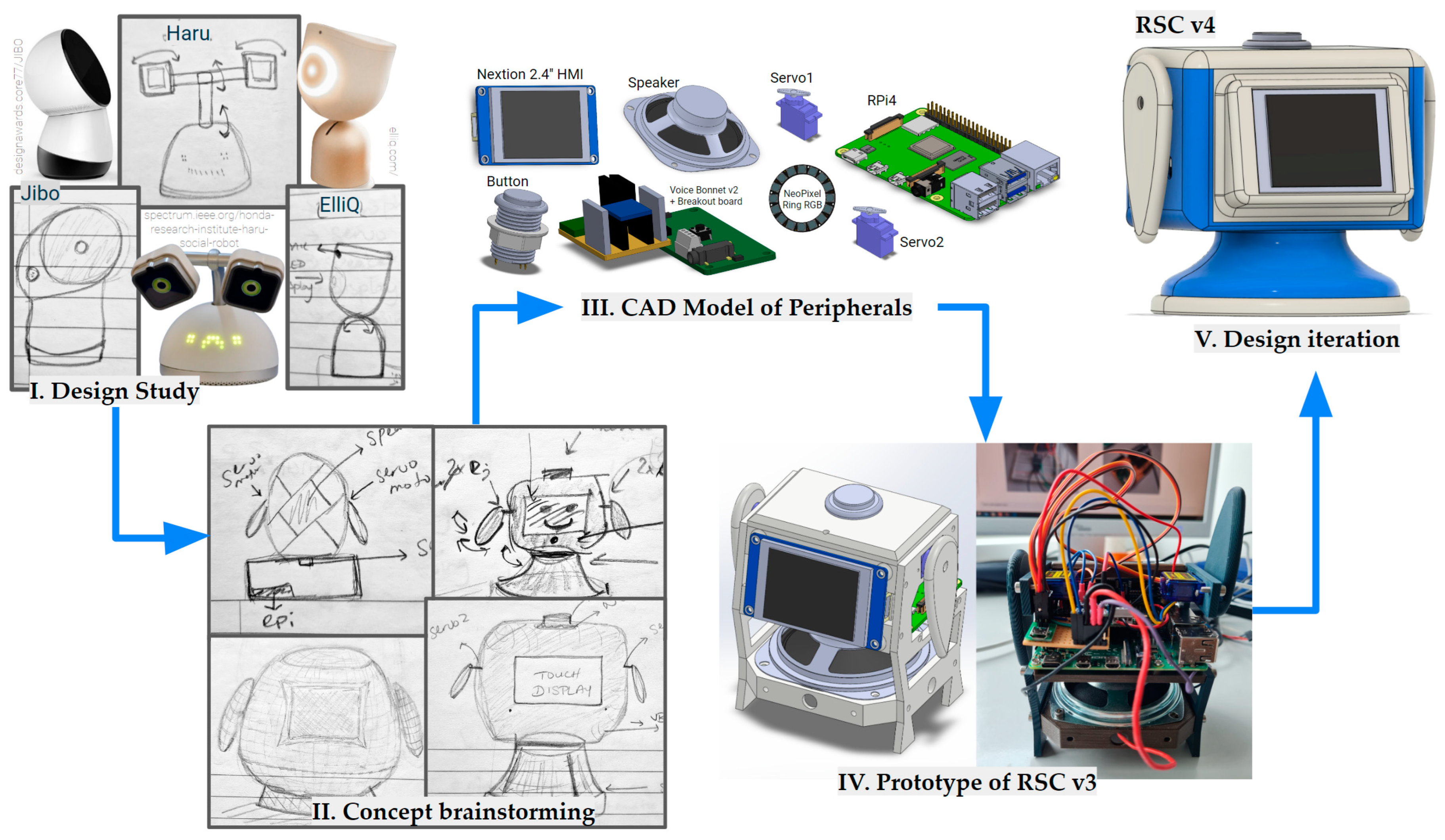
| Req 2 | The Design of the RSC will be User-Centred. | The RSC’s rapid prototype development (Figure 2 and Figure 4) took inspiration from existing solutions (Section 2.2). At ~11 cm in height and weighing ~350 g, the RSC is portable. It features a compact, easy-to-handle hourglass-shaped design suitable for transportation in a student’s backpack. Inspired by university students’ preference for abstract and machine-like aesthetics, the RSC prototype also features a blue-and-white colour palette for a friendlier appearance. Moreover, as the case is 3D-printed, students can further personalise their RSC by choosing their preferred neutral colour combinations. Employing snap-fit construction, the RSC, by design, simplifies assembly and helps to facilitate modifications, including, for example, adding sensors, motors, or a different display. We envision this flexibility, combined with the permissive open-source license, may empower, support, and encourage students to personalise and adapt their RSC to their specific learning environments and user preferences. |
| Req 3 | The RSC should be Obtainable. | Our Bill of Materials (Table 5) uses off-the-shelf components costing ~240 EUR. The RSC is more affordable to a broader audience than existing desktop social robot companions. With the permissive, open-source license, we promote transparent global accessibility, and all files for building the RSC are available on the project’s GitHub [36,78]. We focus on personalisation and customisation to enhance support for new components, improve market access, and increase user adoption. |
| Req 4 | The RSC should provide Adaptable Learning Support. | The presented prototype engages users in a conversation with OpenAI’s GPT-3 API, which was considered state of the art at the time of prototyping during spring 2023 and deprecated in January 2024. The prototype does not analyse student performance, adjust responses based on individual learning styles, or offer customised study plans. |
| Req 5 | The RSC should be Reliable. | While it was designed for maintenance with low tool-use requirements to simplify upkeep and make it relatively easy to maintain, the prototype’s development must advance in several areas to address reliability issues. For example, a noticeable response latency adversely affects the interaction quality. Furthermore, while the prototypes feature many modalities for human–AI interaction, they need further integration to deliver a seamless, responsive, robust, and positive user experience. All features need comprehensive and up-to-date documentation for further development and user maintenance. Finally, the prototype must support long, uninterrupted system uptimes, a crucial reliability aspect. |
| Req 6 | The RSC must be Secure. | The RSC has a physical button that users can press when they want to start a chat. This feature may help address privacy concerns by ensuring no unwanted surveillance or recording occurs. Alternatively, users could opt for a keyword-spotting algorithm instead. The absence of a camera in the design is another deliberate design decision to safeguard user privacy by avoiding any visual data collection that could compromise confidentiality. The use of OpenAI’s GPT-3 API to generate responses means that conversations are stored not locally but remotely, meaning the third party can retain potentially sensitive information. Instead, hosting local LLM inferences in future implementations will enhance user privacy. |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Baksh, F.; Zorec, M.B.; Kruusamäe, K. Open-Source Robotic Study Companion with Multimodal Human–Robot Interaction to Improve the Learning Experience of University Students. Appl. Sci. 2024, 14, 5644. https://doi.org/10.3390/app14135644
Baksh F, Zorec MB, Kruusamäe K. Open-Source Robotic Study Companion with Multimodal Human–Robot Interaction to Improve the Learning Experience of University Students. Applied Sciences. 2024; 14(13):5644. https://doi.org/10.3390/app14135644
Chicago/Turabian StyleBaksh, Farnaz, Matevž Borjan Zorec, and Karl Kruusamäe. 2024. "Open-Source Robotic Study Companion with Multimodal Human–Robot Interaction to Improve the Learning Experience of University Students" Applied Sciences 14, no. 13: 5644. https://doi.org/10.3390/app14135644
APA StyleBaksh, F., Zorec, M. B., & Kruusamäe, K. (2024). Open-Source Robotic Study Companion with Multimodal Human–Robot Interaction to Improve the Learning Experience of University Students. Applied Sciences, 14(13), 5644. https://doi.org/10.3390/app14135644