2.2.1. Real-Time Positioning Information Solution Method
Based on the analysis of the three-dimensional schematic of light reflection on the sea surface, the geometric relationship between the angle of incidence and the solar or lunar altitude angle is determined. As shown in
Figure 2, S represents the position of the sun or moon, O is the point of reflection on the sea surface, and P is the camera position, with
representing the solar or lunar azimuth angle,
the solar or lunar altitude angle, and
the angle of incidence of the solar or lunar light on the sea surface. The geometric relationship between the angle of incidence and the solar or lunar altitude angle, as derived from
Figure 2, is as follows:
The solar and lunar altitude angles are calculated based on real-time information, and the calculation method is as follows.
In the equation,
represents the solar declination angle;
is the observer’s latitude;
is the solar hour angle;
is the solar altitude angle; and
is the solar azimuth angle. The solar declination angle is calculated using the Yu operator, and the solar hour angle
is calculated using the Wloof operator [
19].
The lunar longitude and latitude are calculated using the lunar calculation scheme referenced in ELP/MPP02 [
20] and the lunar position periodic term calculation table developed from document [
21], as shown in Equation (6).
Here,
represents the lunar longitude;
represents the lunar latitude;
is the mean lunar longitude;
is the longitude perturbation term;
is the latitude perturbation term; and
represents the number of relative Julian centuries. The perturbations in longitude and latitude can be calculated using the periodic term calculation table from document [
21].
Subsequently, the longitude and latitude are converted into right ascension and declination, as shown in Equation (7):
Here,
represents the right ascension,
represents the lunar declination, and
represents the obliquity of the ecliptic. The formula for calculating the obliquity of the ecliptic is shown as Equation (8):
The lunar hour angle is calculated using the lunar right ascension
, and the calculation is as follows:
Here, represents the lunar hour angle, represents Greenwich sidereal time, and represents the longitude value of the observation point.
Finally, the lunar declination and lunar hour angle are converted into the lunar azimuth angle and altitude angle.
Here, represents the lunar azimuth angle, represents the lunar altitude angle, and represents the latitude value of the observation point.
Therefore, the expression for the solar and lunar altitude angles is shown in Equation (11), and the light incidence angle is shown in Equation (12).
Here, represents the longitude value of the observation point; represents the latitude value of the observation point; represents the solar and lunar declination angle; represents the solar and lunar hour angle; represents the time information; and represents the solar and lunar light incidence angle.
2.2.2. Orientation Information Solution Method
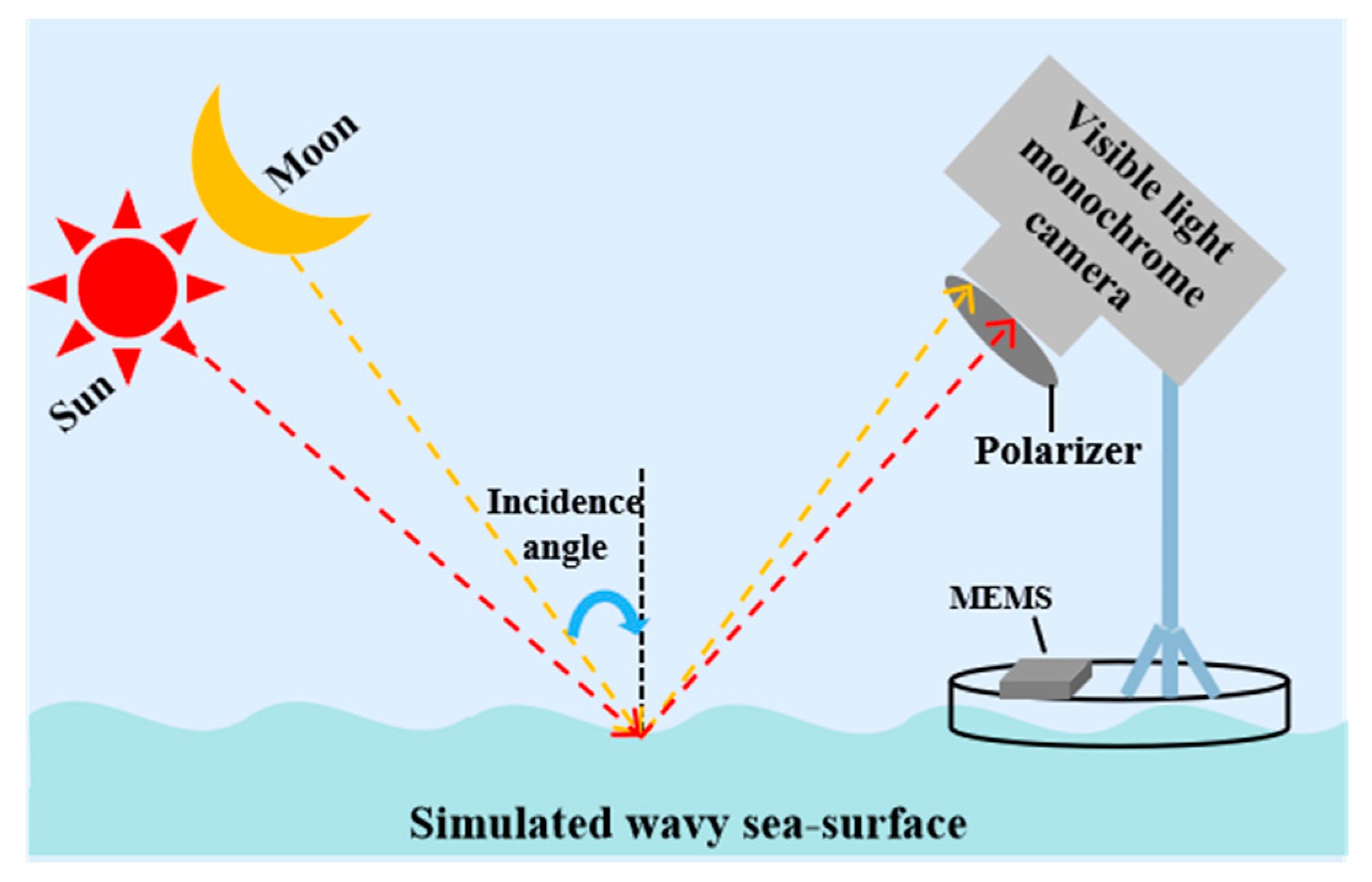
The inherent fluctuation of the sea surface significantly impacts the stable imaging of maritime monitoring platforms, complicating the effective suppression of sea surface glare. To address this challenge, this study employs an orientation information solution method to mitigate the effects of sea surface fluctuations.
During the implementation process, MEMS inertial sensors are utilized to capture the gyroscope’s angular velocity, and in conjunction with the orientation information solution method, precise orientation data is extracted. Within the orientation angle solution framework, Euler angles, direction cosine, and quaternion methods are extensively employed. However, the quaternion method is favored in this paper due to its low computational complexity, absence of singularities, capacity for comprehensive orientation measurement, and superior measurement accuracy [
22].
Let quaternion
be defined, where
is a real number, and
represents mutually orthogonal unit vectors. The quaternion
solution expression is shown in Equation (13).
Here, the initial values of are 1, 0, 0, and 0, respectively, and represent the angular velocity values from the MEMS inertial sensor gyroscope.
The coordinate transformation matrix from the object coordinate system to the geographical coordinate system is denoted as
, expressed by the quaternion as follows:
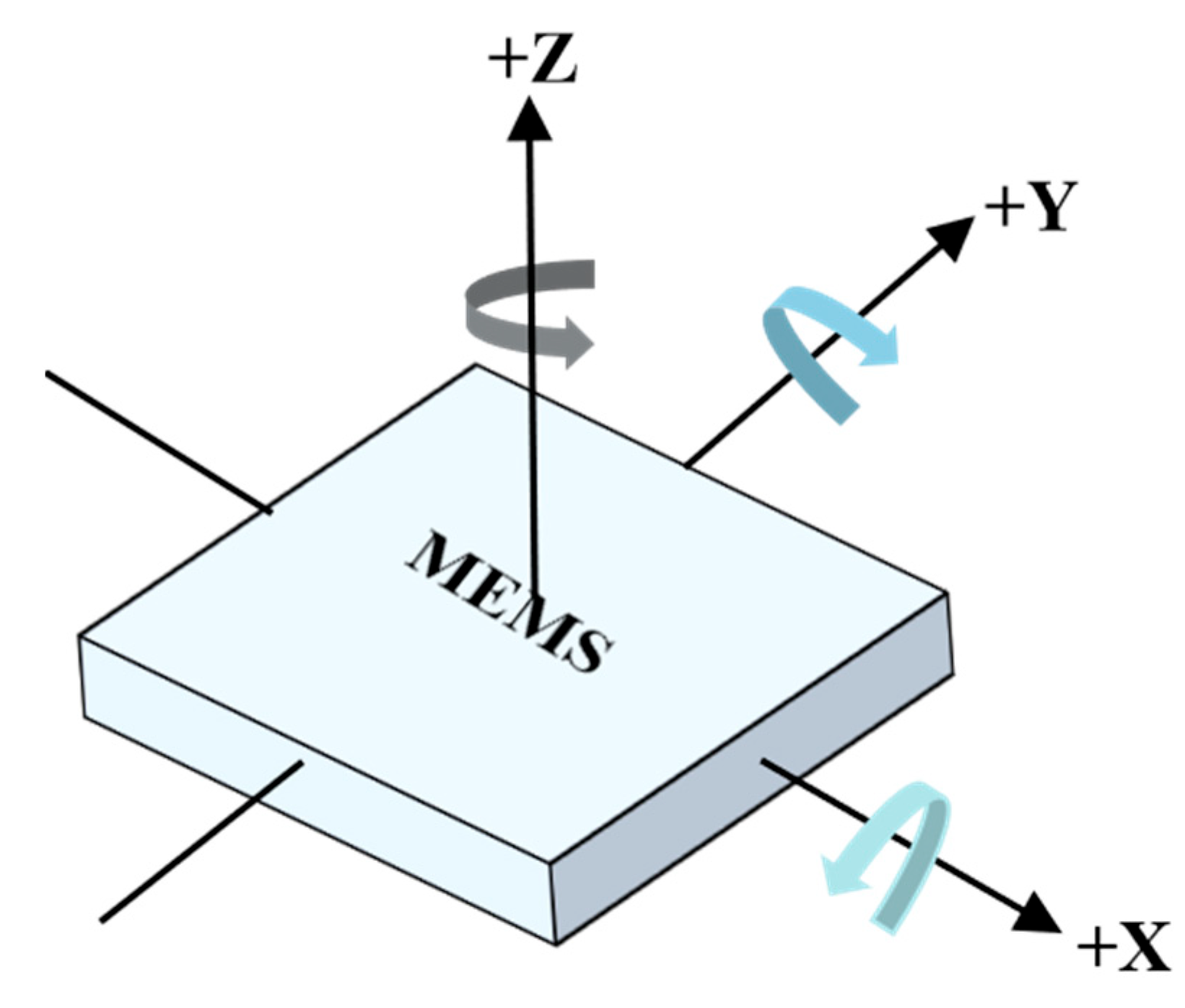
Place the MEMS inertial sensor horizontally with the sensor’s internal center as the origin, horizontally to the right as the
x-axis, vertically upward as the
z-axis, and directly forward as the
y-axis, establishing a spatial Cartesian coordinate system. This coordinate system also aligns with the geographical and the initial object coordinate systems, as illustrated in
Figure 3.
Define the rotation around the
z-axis as the object’s heading angle
, with the transformation matrix denoted as
; the rotation around the
y-axis as the object’s pitch angle
, with the transformation matrix as
; and the rotation around the
x-axis as the object’s roll angle
, with the transformation matrix as
. The transformation matrices
,
, and
are shown in Equation (15).
The object’s orientation transformation is equivalent to the composite rotation of the object around the x, y, and z axes. The composite orientation matrix is
, with the rotation sequence in this paper being
. The post-rotation orientation matrix is shown in Equation (16).
Since the coordinate system remains Cartesian during the rotation from the geographical coordinate system to the object coordinate system,
is an orthogonal matrix, implying
. By relating
and
, the expressions for the rotation angles of each axis can be derived, where these rotation angles represent the orientation angles. The expressions for the orientation angles are shown in Equation (17).
By combining Equations (13) and (17), the angle values of the orientation angles can be calculated. Therefore, the orientation information solution is presented as shown in Equation (18).
2.2.3. Geographic Polarization Suppression Model
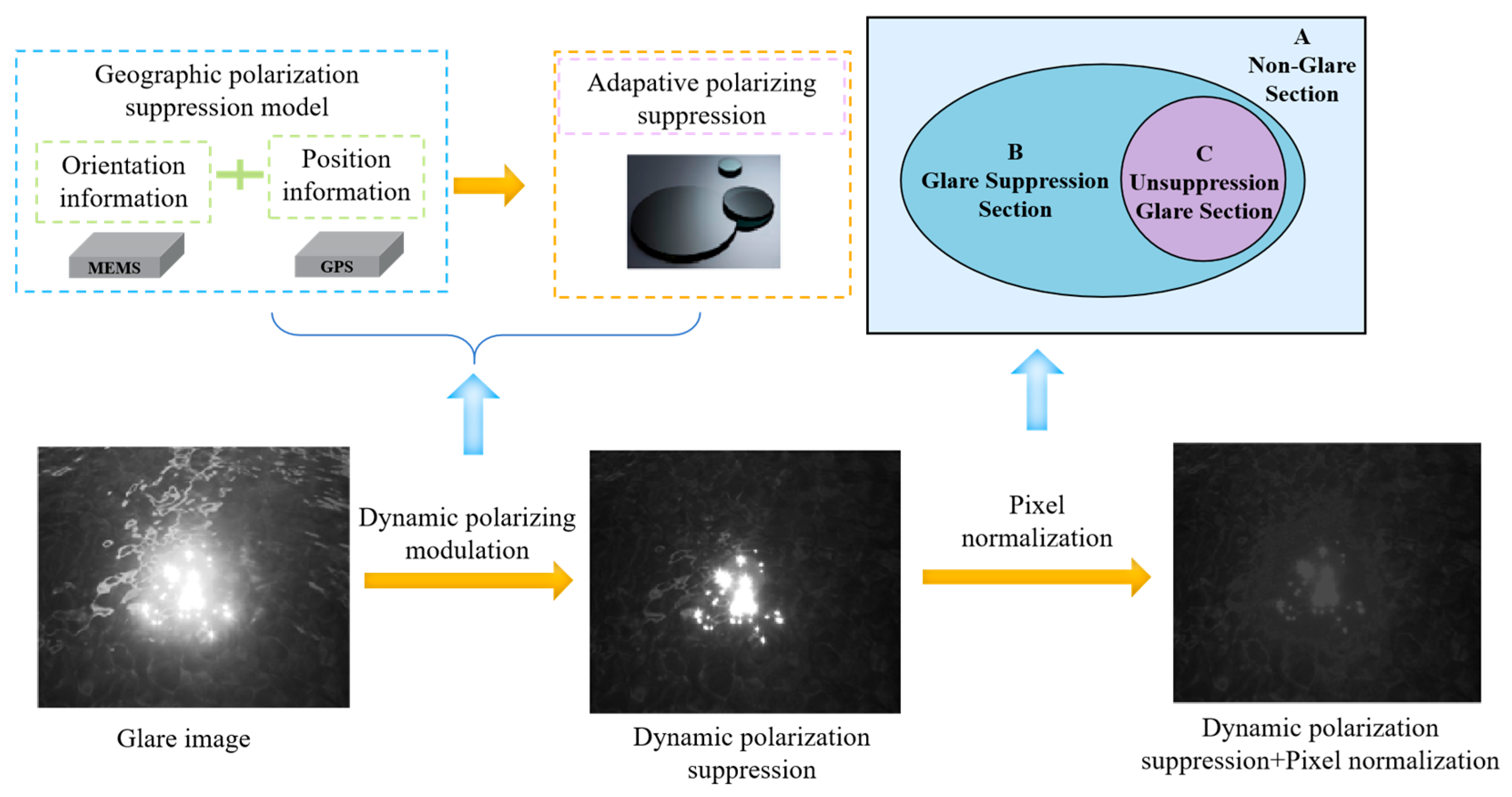
By integrating real-time positioning solutions with orientation information solution methods, a geographic polarization suppression model is developed, as shown in Equation (19).
In the model, represents the real-time positioning solution function, while denotes the orientation information solution function. The model initially acquires GPS data of the measurement point, using the latitude, longitude, and time information as input parameters for the function to calculate the solar or lunar elevation angle and the angle of incidence of light rays. Subsequently, the angular velocity information of the monitoring platform, captured by MEMS sensors, is used as input parameters for the function . The output of is then utilized to mitigate the interference of sea surface wave fluctuations on the monitoring platform.
Ultimately, a geographic polarization suppression model is successfully constructed, capable of achieving all-weather, adaptive, and stable polarization suppression of sea surface glare.
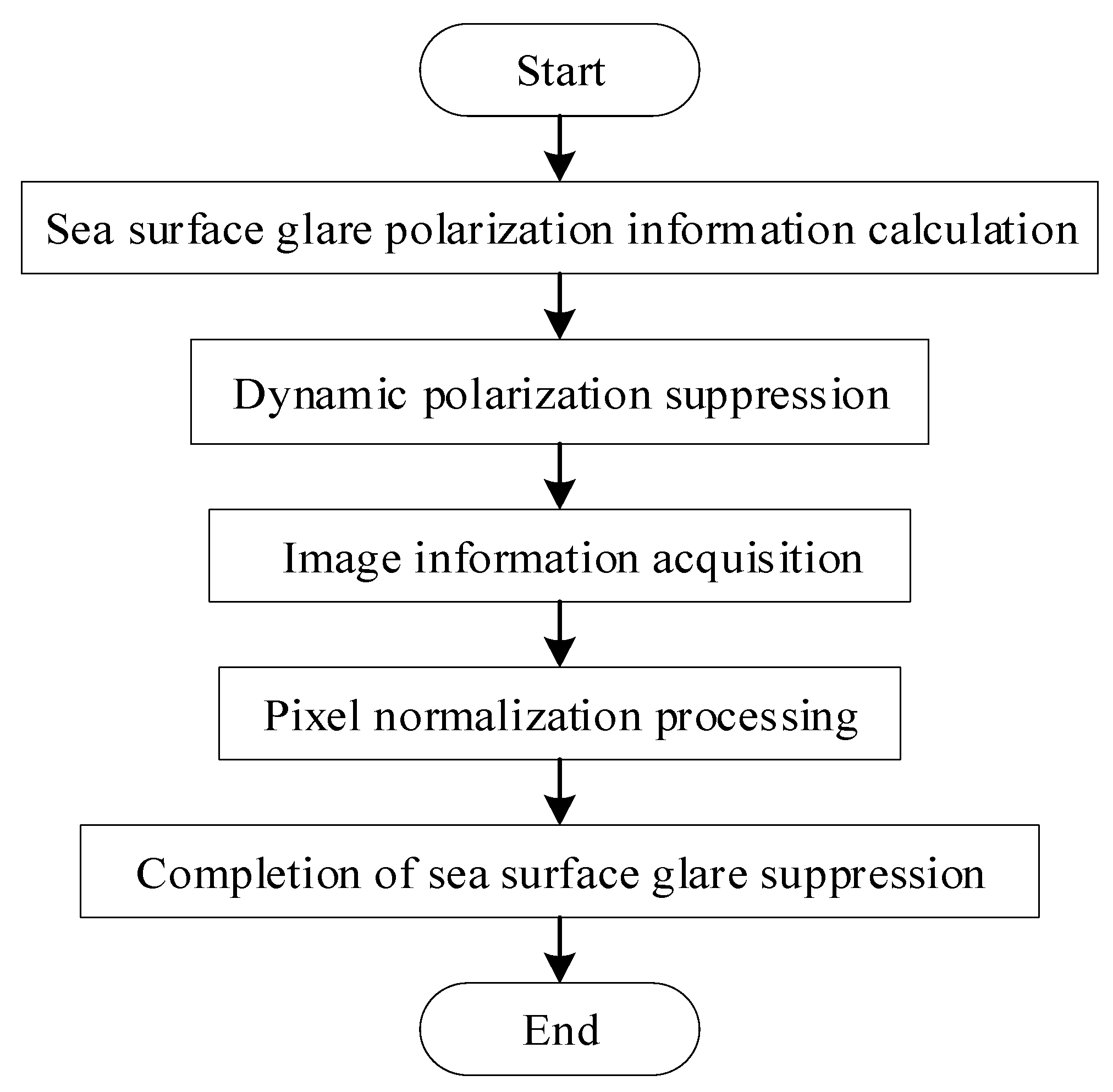
Figure 4 illustrates the glare suppression method process based on the geographic polarization suppression model.

 ,
, 






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}