
Performance Analysis of Direct Torque Controllers in Five-Phase Electrical Drives




Abstract
:1. Introduction
- The fault-tolerant capability against a fault situation in the machine and/or the power converter, first presented in [2]. An n-phase machine can operate after one or several fault occurrences without any external equipment, as long as the number of healthy phases remains greater than or equal to three (assuming a single isolated neutral connection). Consequently, the system reliability is enhanced at the expense of a reduction in the post-fault electrical torque production.
- The capability of increasing the power density in healthy operation by injecting specific current harmonics, exposed in [3]. This is possible in certain multiphase machine configurations based on concentrated windings, where the lower current harmonic components can be used to increase the torque production.
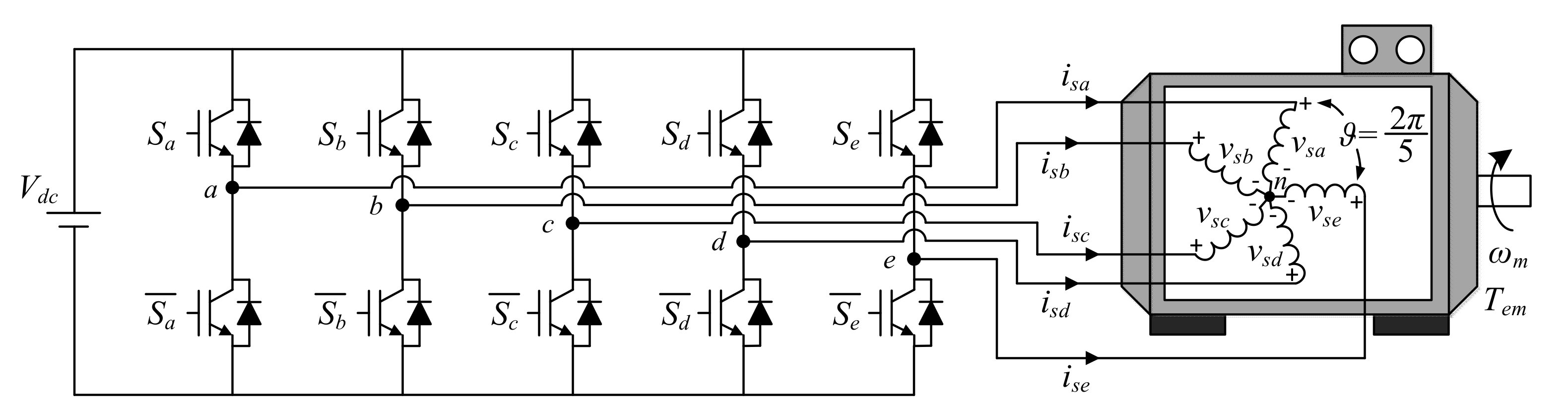
2. The Case Study: Five-Phase Distributed Windings Induction Motor Drive Using a Conventional Two-Level VSI
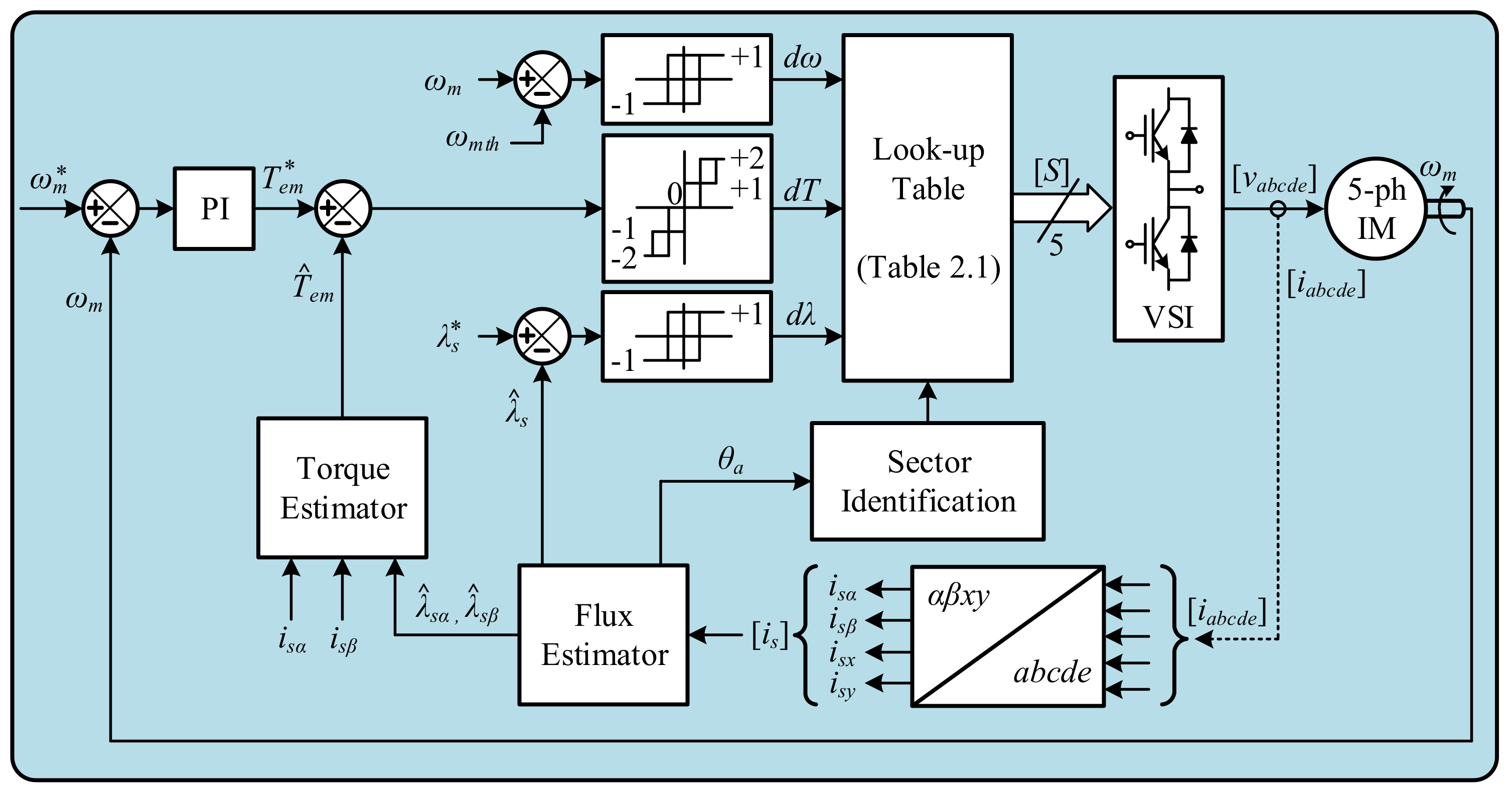
3. DTC in Five-Phase Drives
4. Results and Discussion
4.1. Steady-State Operation
4.2. Load Torque Rejection
4.3. Step-Speed and Reverse Speed Tests
4.4. Fault-Tolerant Capability
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Warg, E.E.; Härer, H. Preliminary investigation of an inventor-fed 5-phase induction motor. Proc. Inst. Electr. Eng. 1969, 116, 980–984. [Google Scholar]
- Jahns, T.M. Improved reliability in solid-state AC drives by means of multiple independent phase drive units. IEEE Trans. Ind. Appl. 1980, IA-16, 321–331. [Google Scholar] [CrossRef]
- Toliyat, H.A.; Lipo, T.A.; White, J.C. Analysis of a concentrated winding induction machine for adjustable speed drive applications. I. Motor analysis. IEEE Trans. Energy Convers. 1991, 6, 679–683. [Google Scholar] [CrossRef]
- Levi, E.; Bojoi, R.; Profumo, F.; Toliyat, H.A.; Williamson, S. Multiphase induction motor drives—A technology status review. IET Electr. Power Appl. 2007, 1, 489–516. [Google Scholar] [CrossRef] [Green Version]
- Levi, E. Multiphase electric machines for variable-speed applications. IEEE Trans. Ind. Electron. 2008, 55, 1893–1909. [Google Scholar] [CrossRef]
- Bojoi, R.; Rubino, S.; Tenconi, A.; Vaschetto, S. Multiphase electrical machines and drives: A viable solution for energy generation and transportation electrification. In Proceedings of the 2016 International Conference and Exposition on Electrical and Power Engineering (EPE), Iasi, Romania, 20–22 October 2016; pp. 632–639. [Google Scholar]
- Cao, W.; Mecrow, B.C.; Atkinson, G.J.; Bennett, J.W.; Atkinson, D.J. Overview of electric motor technologies used for more electric aircraft (MEA). IEEE Trans. Ind. Electron. 2012, 59, 3523–3531. [Google Scholar]
- Barrero, F.; Duran, M.J. Recent advances in the design, modeling, and control of multiphase machines—Part I. IEEE Trans. Ind. Electron. 2016, 63, 449–458. [Google Scholar] [CrossRef]
- Duran, M.J.; Barrero, F. Recent advances in the design, modeling, and control of multiphase machines—Part II. IEEE Trans. Ind. Electron. 2016, 63, 459–468. [Google Scholar] [CrossRef]
- Duran, M.J.; Levi, E.; Barrero, F. Multiphase electric drives: Introduction. In Wiley Encyclopedia of Electrical and Electronics Engineering; Wiley: Hoboken, NJ, USA, 2017. [Google Scholar]
- Barrero, F.; González, I. Control of Multiphase Machines and Drives; MDPI: Basel, Switzerland, 2020; ISBN 978-3-03928-136-7. [Google Scholar]
- Bermúdez, M.; Martín, C.; González, I.; Duran, M.J.; Arahal, M.R.; Barrero, F. Predictive current control in electrical drives: An illustrated review with case examples using a five-phase induction motor drive with distributed windings. IET Electr. Power Appl. 2020, 14, 1291–1310. [Google Scholar] [CrossRef]
- Arahal, M.R.; Martin, C.; Barrero, F.; Duran, M.J. Assessing variable sampling time controllers for five-phase induction motor drives. IEEE Trans. Ind. Electron. 2020, 67, 2523–2531. [Google Scholar] [CrossRef]
- Arahal, M.R.; Satué, M.G.; Barrero, F.; Ortega, M.G. Adaptive Cost Function FCSMPC for 6-Phase IMs. Energies 2021, 14, 5222. [Google Scholar] [CrossRef]
- Takahashi, I.; Noguchi, T. A New Quick-Response and High-Efficiency Control Strategy of an Induction Motor. IEEE Trans. Ind. Appl. 1986, IA-22, 820–827. [Google Scholar] [CrossRef]
- Depenbrock, M. Direct self-control (DSC) of inverter-fed induction machine. IEEE Trans. Power Electron. 1988, 3, 420–429. [Google Scholar] [CrossRef]
- Fei, Y.; Xiaofeng, Z.; Minzhong, Q.; Chengdong, D. The direct torque control of multiphase permanent magnet synchronous motor based on low harmonic space vector PWM. In Proceedings of the IEEE International Conference on Industrial Technology (ICIT-2008), Chengdu, China, 21–24 April 2008; pp. 1–5. [Google Scholar]
- ABB Group. DTC: A Motor Control Technique for All Seasons. ABB White Paper. 2015. Available online: http://library.e.abb.com/public/0e07ab6a2de30809c1257e2d0042db5e/ABB_WhitePaper_DTC_A4_20150414.pdf (accessed on 27 October 2021).
- Hadiouche, D.; Razik, H.; Rezzoug, A. On the modeling and design of dual-stator windings to minimize circulating harmonic currents for VSI fed AC machines. IEEE Trans. Ind. Appl. 2004, 40, 506–515. [Google Scholar] [CrossRef]
- Buja, G.S.; Kazmierkowski, M.P. Direct torque control of PWM inverter-fed AC motors—A survey. IEEE Trans. Ind. Electron. 2004, 51, 744–757. [Google Scholar] [CrossRef]
- Kianinezhad, R.; Nahid, B.; Betin, F.; Capolino, G.A. A novel Direct Torque Control (DTC) method for dual three phase induction motors. In Proceedings of the IEEE International Conference on Industrial Technology (ICIT 2006), Mumbai, India, 15–17 December 2006; pp. 939–943. [Google Scholar]
- Kianinezhad, R.; Alcharea, R.; Nahid, B.; Betin, F.; Capolino, G.A. A novel direct torque control (DTC) for six-phase induction motors with common neutrals. In Proceedings of the International Symposium on Power Electronics, Electrical Drives, Automation and Motion (SPEEDAM 2008), Ischia, Italy, 11–13 June 2008; pp. 107–112. [Google Scholar]
- Zheng, L.; Fletcher, J.E.; Williams, B.W.; He, X. A Novel Direct Torque Control Scheme for a Sensorless Five-Phase Induction Motor Drive. IEEE Trans. Ind. Electron. 2011, 58, 503–513. [Google Scholar] [CrossRef]
- Parsa, L.; Toliyat, H.A. Sensorless Direct Torque Control of Five-Phase Interior Permanent-Magnet Motor Drives. IEEE Trans. Ind. Appl. 2007, 43, 952–959. [Google Scholar] [CrossRef]
- Gao, Y.; Parsa, L. Modified Direct Torque Control of Five-Phase Permanent Magnet Synchronous Motor Drives. In Proceedings of the 22nd Annual IEEE Applied Power Electronics Conference and Exposition (APEC 2007), Anaheim, CA, USA, 25 February–1 March 2007; pp. 1428–1433. [Google Scholar]
- Gao, L.; Fletcher, J.E.; Zheng, L. Low-Speed Control Improvements for a Two-Level Five-Phase Inverter-Fed Induction Machine Using Classic Direct Torque Control. IEEE Trans. Ind. Electron. 2011, 58, 2744–2754. [Google Scholar] [CrossRef]
- Riveros, J.A.; Duran, M.J.; Barrero, F.; Toral, S. Direct torque control for five-phase induction motor drives with reduced common-mode voltage. In Proceedings of the 38th Annual Conference on IEEE Industrial Electronics Society (IECON 2012), Montreal, QC, Canada, 25–28 October 2012; pp. 3616–3621. [Google Scholar]
- Tatte, Y.N.; Aware, M.V. Direct Torque Control of Five-Phase Induction Motor with Common-Mode Voltage and Current Harmonics Reduction. IEEE Trans. Power Electron. 2017, 32, 8644–8654. [Google Scholar] [CrossRef]
- Chikondra, B.; Muduli, U.R.; Behera, R.K. An Improved Open-Phase Fault-Tolerant DTC Technique for Five-Phase Induction Motor Drive Based on Virtual Vectors Assessment. IEEE Trans. Ind. Electron. 2021, 68, 4598–4609. [Google Scholar] [CrossRef]
- Barrero, F.; Bermúdez, M.; Durán, M.J.; Salas, P.; González-Prieto, I. Assessment of a Universal Reconfiguration-less Control Approach in Open-Phase Fault Operation for Multiphase Drives. Energies 2019, 12, 4698. [Google Scholar] [CrossRef] [Green Version]
- Bermúdez, M.; González-Prieto, I.; Barrero, F.; Guzmán, H.; Duran, M.J.; Kestelyn, X. Open-Phase Fault-Tolerant Direct Torque Control Technique for Five-Phase Induction Motor Drives. IEEE Trans. Ind. Electron. 2017, 64, 902–911. [Google Scholar] [CrossRef] [Green Version]
- Bermúdez, M.; González-Prieto, I.; Barrero, F.; Guzmán, H.; Kestelyn, X.; Duran, M.J. An Experimental Assessment of Open-Phase Fault-Tolerant Virtual-Vector-Based Direct Torque Control in Five-Phase Induction Motor Drives. IEEE Trans. Power Electron. 2018, 33, 2774–2784. [Google Scholar] [CrossRef] [Green Version]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| dλ | dT | dω | Position of the Stator Flux (Sector) | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | |||
| +1 | +2 | +1 | VVL3 | VVL4 | VVL5 | VVL6 | VVL7 | VVL8 | VVL9 | VVL10 | VVL1 | VVL2 |
| −1 | VVL2 | VVL3 | VVL4 | VVL5 | VVL6 | VVL7 | VVL8 | VVL9 | VVL10 | VVL1 | ||
| +1 | +1 | VVS3 | VVS4 | VVS5 | VVS6 | VVS7 | VVS8 | VVS9 | VVS10 | VVS1 | VVS2 | |
| −1 | VVS2 | VVS3 | VVS4 | VVS5 | VVS6 | VVS7 | VVS8 | VVS9 | VVS10 | VVS1 | ||
| 0 | +1 | v0 | v31 | v0 | v31 | v0 | v31 | v0 | v31 | v0 | v31 | |
| −1 | v0 | v31 | v0 | v31 | v0 | v31 | v0 | v31 | v0 | v31 | ||
| −1 | +1 | VVS9 | VVS10 | VVS1 | VVS2 | VVS3 | VVS4 | VVS5 | VVS6 | VVS7 | VVS8 | |
| −1 | VVS10 | VVS1 | VVS2 | VVS3 | VVS4 | VVS5 | VVS6 | VVS7 | VVS8 | VVS9 | ||
| −2 | +1 | VVL9 | VVL10 | VVL1 | VVL2 | VVL3 | VVL4 | VVL5 | VVL6 | VVL7 | VVL8 | |
| −1 | VVL10 | VVL1 | VVL2 | VVL3 | VVL4 | VVL5 | VVL6 | VVL7 | VVL8 | VVL9 | ||
| −1 | +2 | +1 | VVL4 | VVL5 | VVL6 | VVL7 | VVL8 | VVL9 | VVL10 | VVL1 | VVL2 | VVL3 |
| −1 | VVL5 | VVL6 | VVL7 | VVL8 | VVL9 | VVL10 | VVL1 | VVL2 | VVL3 | VVL4 | ||
| +1 | +1 | VVS4 | VVS5 | VVS6 | VVS7 | VVS8 | VVS9 | VVS10 | VVS1 | VVS2 | VVS3 | |
| −1 | VVS5 | VVS6 | VVS7 | VVS8 | VVS9 | VVS10 | VVS1 | VVS2 | VVS3 | VVS4 | ||
| 0 | +1 | v31 | v0 | v31 | v0 | v31 | v0 | v31 | v0 | v31 | v0 | |
| −1 | v31 | v0 | v31 | v0 | v31 | v0 | v31 | v0 | v31 | v0 | ||
| −1 | +1 | VVS8 | VVS9 | VVS10 | VVS1 | VVS2 | VVS3 | VVS4 | VVS5 | VVS6 | VVS7 | |
| −1 | VVS7 | VVS8 | VVS9 | VVS10 | VVS1 | VVS2 | VVS3 | VVS4 | VVS5 | VVS6 | ||
| −2 | +1 | VVL8 | VVL9 | VVL10 | VVL1 | VVL2 | VVL3 | VVL4 | VVL5 | VVL6 | VVL7 | |
| −1 | VVL7 | VVL8 | VVL9 | VVL10 | VVL1 | VVL2 | VVL3 | VVL4 | VVL5 | VVL6 | ||
| Parameter | Value | Unit |
|---|---|---|
| Stator resistance, Rs | 12.85 | Ω |
| Rotor resistance, Rr | 4.80 | Ω |
| Stator leakage inductance, Lls | 79.93 | mH |
| Rotor leakage inductance, Llr | 79.93 | mH |
| Mutual inductance, M | 681.7 | mH |
| Rotational inertia, Jm | 0.02 | kg-m2 |
| Number of pairs of poles, p | 3 | - |
| Closed-Loop System Performance | DTC |
|---|---|
| Speed tracking error when the fault appears | Negligible |
| Torque tracking loss in control during the delay | No |
| Robustness against fault detection delay | High |
| Computational cost | Low |
| Harmonic content in stator currents | High |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Bermúdez, M.; Barrero, F.; Martín, C.; Perales, M. Performance Analysis of Direct Torque Controllers in Five-Phase Electrical Drives. Appl. Sci. 2021, 11, 11964. https://doi.org/10.3390/app112411964
Bermúdez M, Barrero F, Martín C, Perales M. Performance Analysis of Direct Torque Controllers in Five-Phase Electrical Drives. Applied Sciences. 2021; 11(24):11964. https://doi.org/10.3390/app112411964
Chicago/Turabian StyleBermúdez, Mario, Federico Barrero, Cristina Martín, and Manuel Perales. 2021. "Performance Analysis of Direct Torque Controllers in Five-Phase Electrical Drives" Applied Sciences 11, no. 24: 11964. https://doi.org/10.3390/app112411964
APA StyleBermúdez, M., Barrero, F., Martín, C., & Perales, M. (2021). Performance Analysis of Direct Torque Controllers in Five-Phase Electrical Drives. Applied Sciences, 11(24), 11964. https://doi.org/10.3390/app112411964