
Relational Positioning Method for 2D and 3D Ad Hoc Sensor Networks in Industry 4.0



Abstract
:Featured Application
Abstract
1. Introduction
2. Related Research
3. Relational Positioning Method
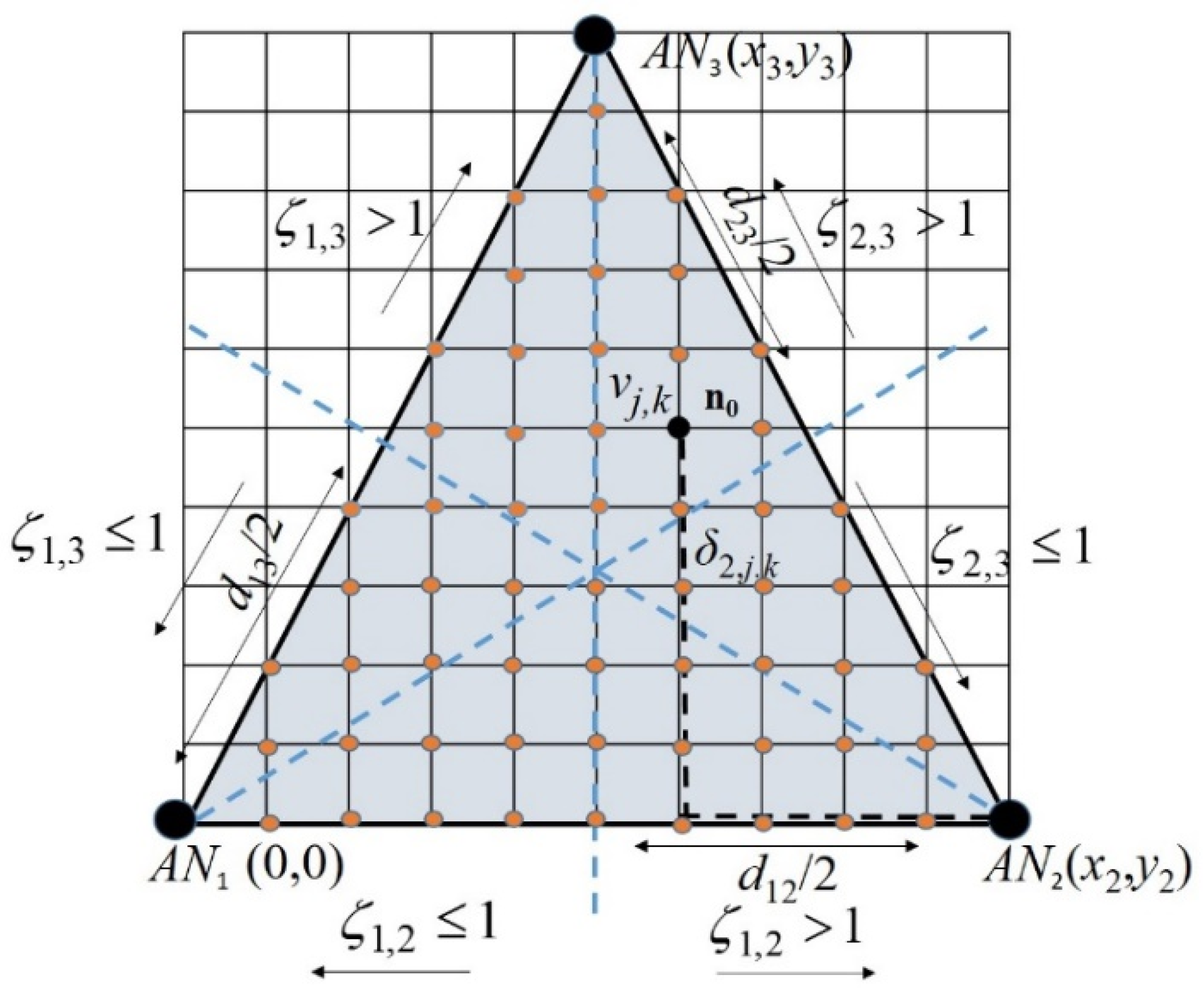
3.1. Two-Dimensional (2D) Localization
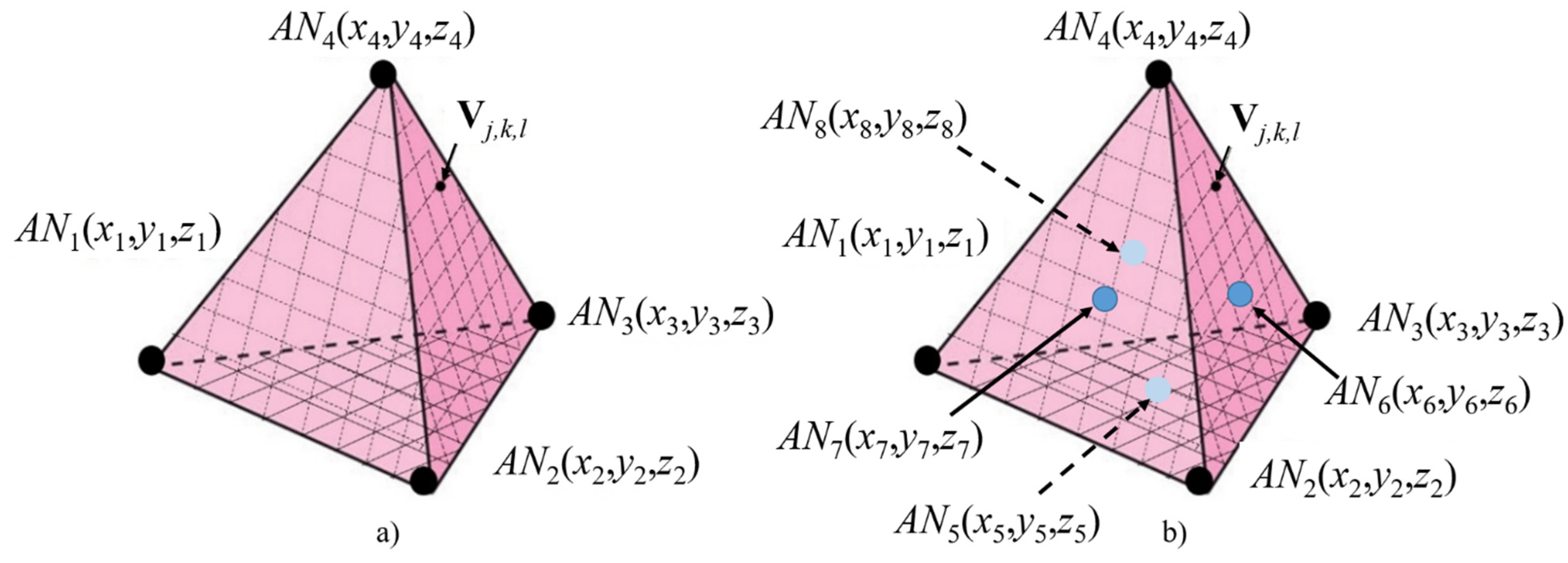
3.2. Three-Dimensional (3D) Localization
- Discretize the working operational area or space, obtaining vj,k,l;
- Calculate the Manhattan distance from ANi to vj,k,l, ;
- Obtain the route from ANs to the node of interest n0;
- Calculate distance from ANi to n0 based on the number of hops in the route Δi,(j,k,l);
- Calculate distance relationships between every pair of ANs as ζi,m = Δi,(j,k,l)/Δm,(j,k,l);
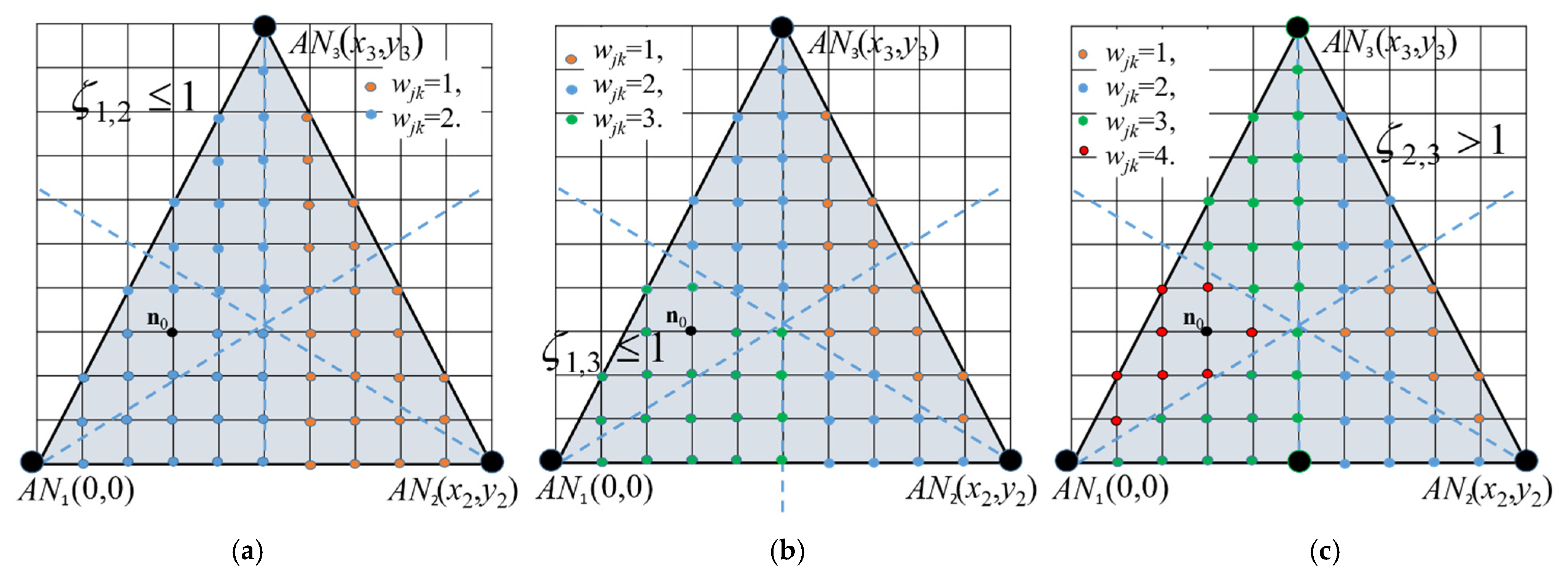
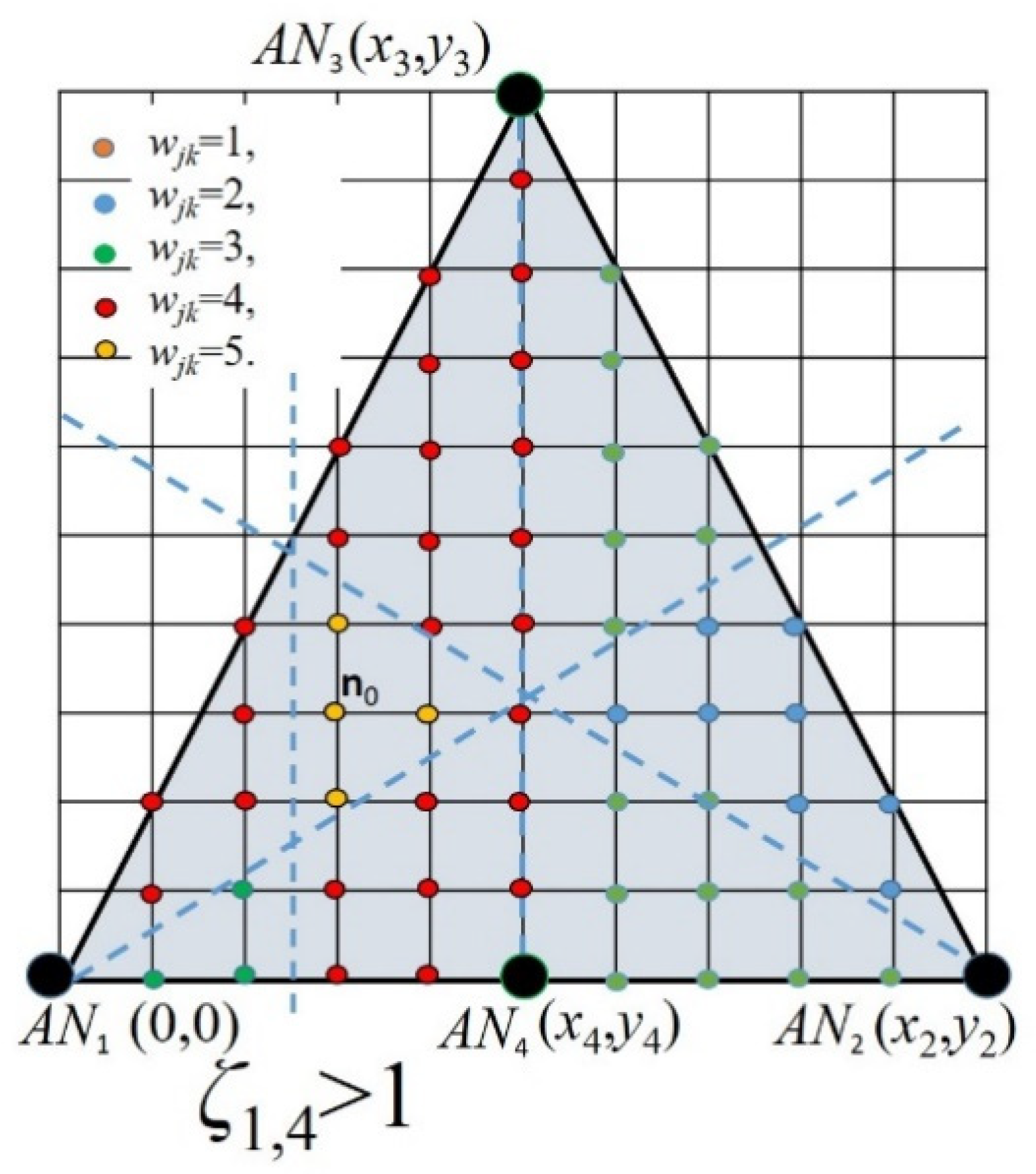
- Modify vertex weight wj,k,l for every pair of ANs, as follows: If ζi,m < 1, then the node is closer to ANi than to ANm, hence every vertex weight wj,k,l closer to ANi is increased by 1. Otherwise, increase by 1 every vertex weight wj,k,l closer to ANm;
- Calculate the location likelihood matrix j,k,l;
- Perform the minimum-error searching based on equation to find the estimated location.
4. Simulations and Results
4.1. The 2D Evaluation
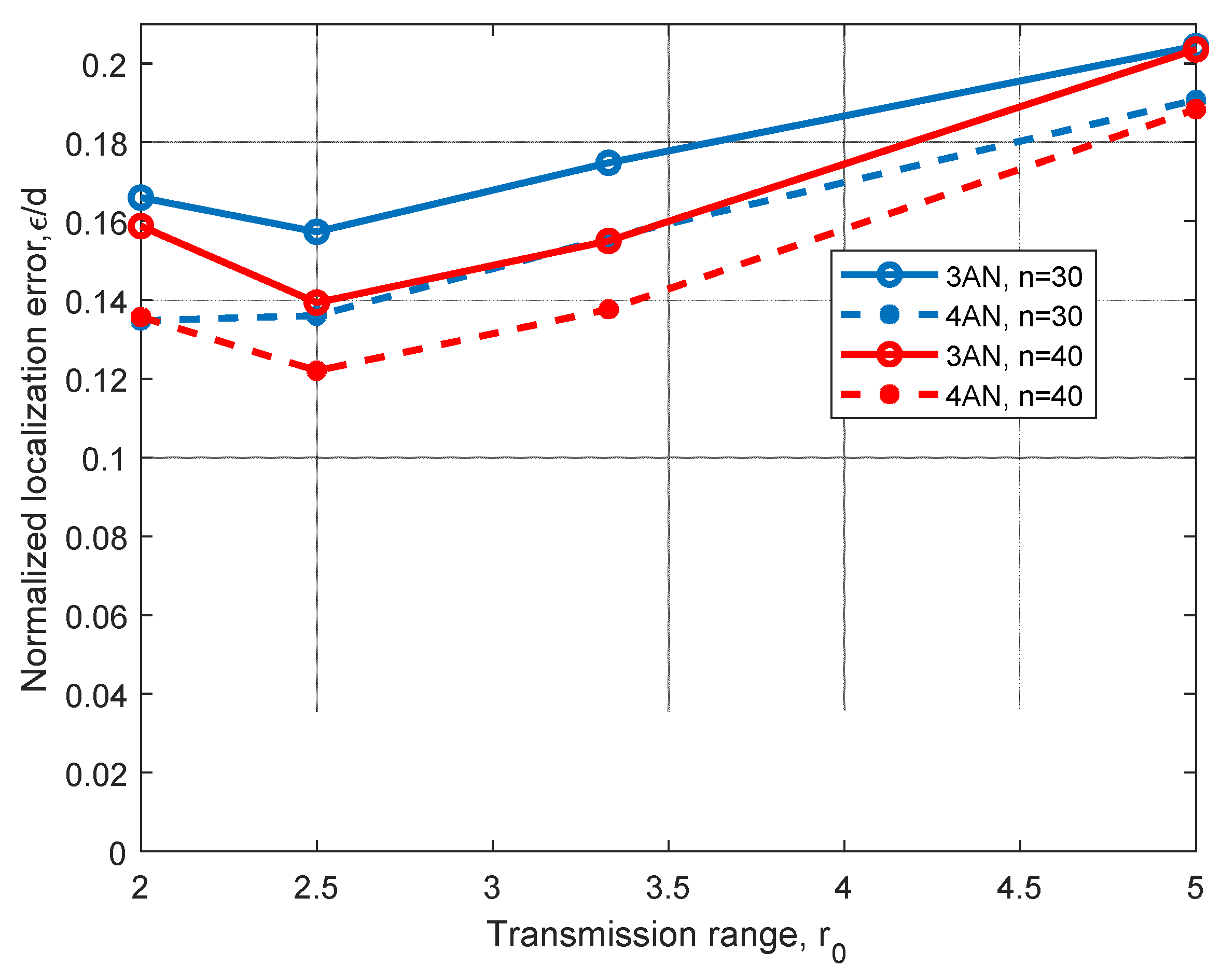
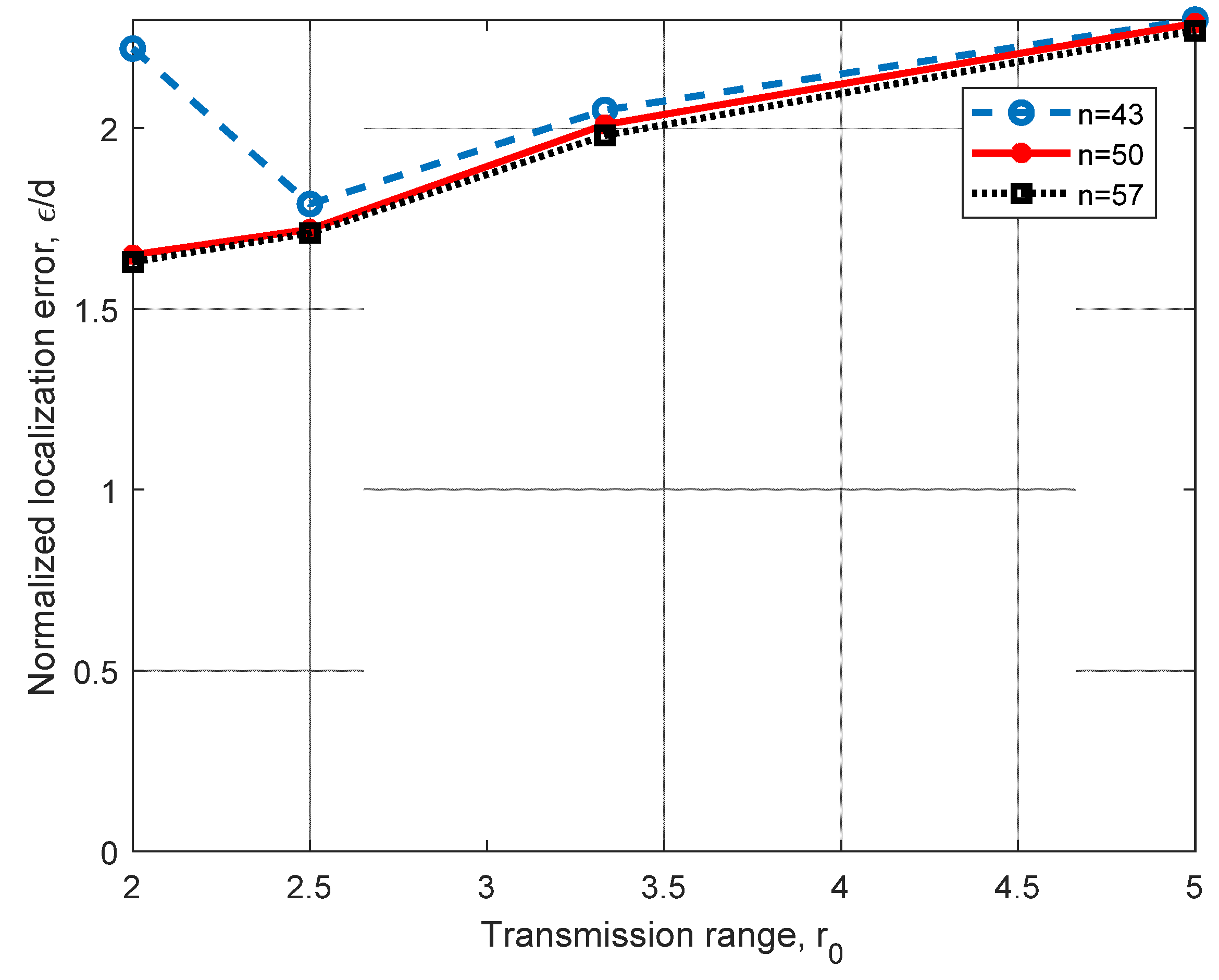
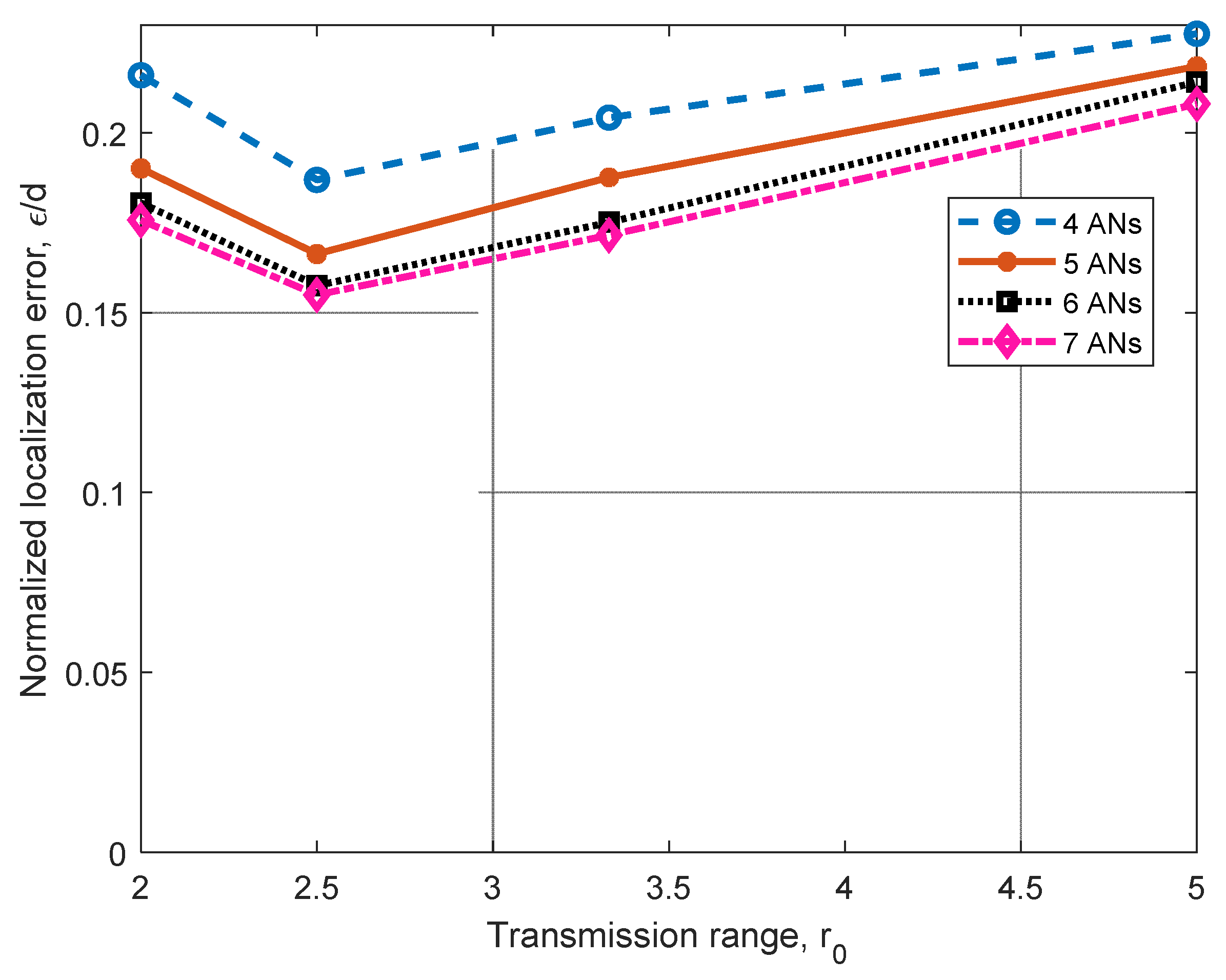
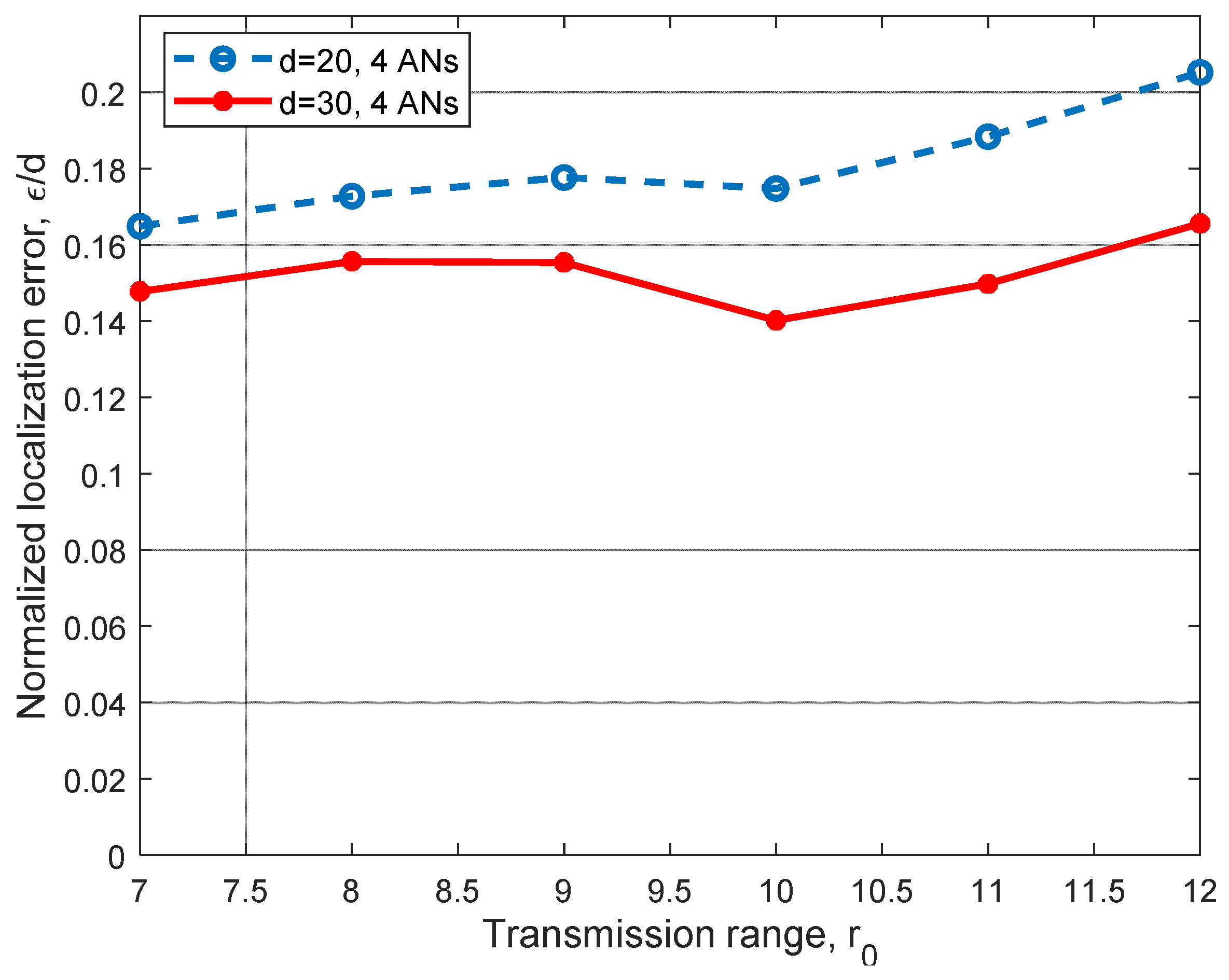
4.2. The 3D Evaluation
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Syberfeldt, A.; Ayani, M.; Holm, M.; Wang, L.; Lindgren-Brewster, R. Localizing Operators in the Smart Factory: A Review of Existing Techniques and Systems. In Proceedings of the ISFA2016, Cleveland, OH, USA, 1–3 August 2016. [Google Scholar]
- Pahlavan, K.; Krishnamurthy, P. Principles of Wireless Networks: A Unified Approach, 1st ed.; Prentice Hall PTR: Upper Saddle River, NJ, USA, 2002. [Google Scholar]
- Yavari, M.; Nickerson, B.G. Ultra-Wideband Wireless Positioning Systems; Tech. Rep. TR14-230; Faculty of Computer Science, University of New Brunswick: Fredericton, NB, Canada, 2014. [Google Scholar]
- Muñoz-Rodriguez, D.; Bouchereau, F.; Vargas-Rosales, C.; Enriquez-Caldera, R. Position Location Techniques and Applications, 1st ed.; Academic Press: Cambridge, MA, USA, 2009. [Google Scholar]
- Jin, M.H.; Wu, H.K.; Hormg, J.T. An Intelligent Handoff Scheme Based on Location Prediction Technologies. IEEE Eur. Wirel. 2002, 551–557. [Google Scholar]
- Yash, A.; Kritika, J.; Orkun, K. Smart vehicle monitoring and assistance using cloud computing in vehicular Ad Hoc networks. Int. J. Transp. Sci. Technol. 2018, 7, 60–73. [Google Scholar]
- Villalpando-Hernandez, R.; Munoz-Rodriguez, D.; Vargas-Rosales, C.; Rizo-Dominguez, L. 3-D Position Location in Ad Hoc Networks: A Manhattanized Space. IEEE Commun. Lett. 2017, 21, 124–127. [Google Scholar] [CrossRef]
- Sayed, A.H.; Tarighat, A.; Khajehnouri, N. Network-based wireless location: Challenges faced in developing techniques for accurate wireless location information. IEEE Signal Process. Mag. 2005, 22, 24–40. [Google Scholar] [CrossRef]
- Vargas-Rosales, C.; Maidana, Y.; Villalpando-Hernandez, R.; Azpilicueta, L. Statistical Evaluation of the Positioning Error in Sequential Localization Techniques for Sensor Networks. In Proceedings of the 3rd International Electronic Conference on Sensors and Applications ECSA2016, Copenhagen, Denmark, 28 November–2 December 2016. [Google Scholar]
- Singh, M.; Khilar, P.M. An Analytical Geometric Range Free Localization Scheme Based on Mobile Beacon Points in Wireless Sensor Network. Wirel. Netw. 2016, 22, 2537–2550. [Google Scholar] [CrossRef]
- Brena, R.F.; García-Vazquez, J.P.; Galván-Tejada, C.E.; Muñoz-Rodriguez, D.; Vargas-Rosales, C.; Fangmeyer, J., Jr. Evolution of Indoor Positioning Technologies: A Survey. J. Sens. 2017, 2017, 2630413. [Google Scholar] [CrossRef]
- Zafari, F.; Gkelias, A.; Leung, K. A Survey of Indoor Localization Systems and Technologies. IEEE Commun. Surv. Tutor. 2019, 21, 2568–2599. [Google Scholar] [CrossRef] [Green Version]
- Kim, E.; Choi, E. A 3DAd Hoc Localization System Using Aerial Sensor Nodes. IEEE Sens. J. 2015, 15, 3716–3723. [Google Scholar] [CrossRef]
- Xu, Y.; Zhuang, Y.; Gu, J. An improved 3D Localization Algorithm for the Wireless Sensor Networks. Int. J. Distrib. Sens. Netw. 2015, 11, 315714. [Google Scholar] [CrossRef] [PubMed]
- Yang, X.; Yan, F.; Liu, J. 3D Localization Algorithm Based on Voronoi Diagram and Rank Sequence in Wireless Sensor Network. Sci. Program. J. 2017, 2017, 4769710. [Google Scholar] [CrossRef] [Green Version]
- Nath, S.; Venkatesan, N.E.; Kumar, A.; Kumar, V. Theory and Algorithms for Hop-Count-Based Localization with Random Geometric Graph Models of Dense Sensor Networks. ACM Trans. Sens. Netw. 2012, 8, 1–38. [Google Scholar] [CrossRef]
- Saeed, N.; Nam, H.; Al-Naffouri, T.; Alouini, M. A State-of-the-Art Survey on Multidimensional Scaling-Based Localization Technique. IEEE Commun. Surv. Tutor. 2019, 21, 3565–3583. [Google Scholar] [CrossRef] [Green Version]
- Tao, J.; Tao, R.; Buehrer, M. Collaborative Position Location for Wireless Networks Using Iterative Parallel Projection Method. In Proceedings of the IEEE Globecom, Miami, FL, USA, 6–10 December 2010. [Google Scholar]
- Tommiska, M.; Skytta, J. Dijkstra’s Shortest Path Routing Algorithm in Reconfigurable Hardware. In Proceedings of the 11th Conference on Field-Programmable Logic Applications, Belfast, UK, 27–29 August 2001; pp. 653–657. [Google Scholar]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| 3D PL Method | Principle | Accuracy |
|---|---|---|
| A 3D ad hoc localization system using aerial sensor nodes [13]. | Traditional triangulation using UWB equipped aerial nodes. | In terms of standard deviation σ. They achieve 0.24 m σ. |
| An improved 3D localization algorithm for the wireless sensor network [14]. | Traditional quadrilateration combined with an optimization method. | Localization error is normalized to r0. Achieving error of 0.35 r0 for 17 ANs. |
| 3D localization algorithm based on Voronoi diagram and rank sequence in wireless sensor network [15]. | Sequence localization using a Voronoi table to divide space. Then, construct a rank sequence for virtual beacon nodes. | Localization error is normalized to r0. Achieving 0.12 r0 for 8 ANs. |
| 3D position location in ad hoc networks: a Manhattanized space [7]. | Algebraic Manhattan restrictions. | In terms of mean Euclidean distance error, normalized to the Tx range r0. They achieve 0.8 r0 for 4 anchors. |
| r0(m) | 2 | 2.5 | 3.333 | 5 |
|---|---|---|---|---|
| x3 = d sin | 0.1606 | 0.1410 | 0.1553 | 0.209 |
| x3 = d sin ± 1 | 0.1380 | 0.1308 | 0.1520 | 0.2025 |
| x3 = d sin ± 2 | 0.1415 | 0.1328 | 0.1448 | 0.2034 |
| x3 = d sin ± 3 | 0.1406 | 0.1106 | 0.1301 | 0.1810 |
| x3 = d sin ± 4 | 0.1396 | 0.1220 | 0.1518 | 0.1860 |
| x3 = d sin ± 5 | 0.1390 | 0.1163 | 0.1545 | 0.2005 |
| r0(m) | 2 | 2.5 | 3.333 | 5 |
|---|---|---|---|---|
| x3 = d sin | 0.2160 | 0.1869 | 0.2042 | 0.2275 |
| x3 = d sin ± 1 | 0.2129 | 0.1899 | 0.2080 | 0.2364 |
| x3 = d sin ± 2 | 0.2232 | 0.2067 | 0.2157 | 0.2269 |
| x3 = d sin ± 3 | 0.2160 | 0.1821 | 0.1997 | 0.2370 |
| x3 = d sin ± 4 | 0.2106 | 0.1879 | 0.1927 | 0.2273 |
| x3 = d sin ± 5 | 0.2128 | 0.2025 | 0.2082 | 0.2286 |
| r0(m) | 2 | 2.5 | 3.333 | 5 |
|---|---|---|---|---|
| h = 10 m | 0.216 | 0.1869 | 0.204213 | 0.2275 |
| h = 11 m | 0.224 | 0.196075 | 0.218312 | 0.262 |
| h = 12 m | 0.23 | 0.2002 | 0.220778 | 0.2623 |
| h = 13 m | 0.22356 | 0.193516 | 0.233377 | 0.2672 |
| r0(m) | 2 | 2.5 | 3.333 | 5 |
|---|---|---|---|---|
| HL=1 | 2.8 | 2.66 | 2.86 | 3.04 |
| HL=1/2 | 4.94 | 4.7112 | 4.78 | 5.29 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Villalpando-Hernandez, R.; Munoz-Rodriguez, D.; Vargas-Rosales, C. Relational Positioning Method for 2D and 3D Ad Hoc Sensor Networks in Industry 4.0. Appl. Sci. 2021, 11, 8907. https://doi.org/10.3390/app11198907
Villalpando-Hernandez R, Munoz-Rodriguez D, Vargas-Rosales C. Relational Positioning Method for 2D and 3D Ad Hoc Sensor Networks in Industry 4.0. Applied Sciences. 2021; 11(19):8907. https://doi.org/10.3390/app11198907
Chicago/Turabian StyleVillalpando-Hernandez, Rafaela, David Munoz-Rodriguez, and Cesar Vargas-Rosales. 2021. "Relational Positioning Method for 2D and 3D Ad Hoc Sensor Networks in Industry 4.0" Applied Sciences 11, no. 19: 8907. https://doi.org/10.3390/app11198907
APA StyleVillalpando-Hernandez, R., Munoz-Rodriguez, D., & Vargas-Rosales, C. (2021). Relational Positioning Method for 2D and 3D Ad Hoc Sensor Networks in Industry 4.0. Applied Sciences, 11(19), 8907. https://doi.org/10.3390/app11198907