
Torque Reduction of a Reconfigurable Spherical Parallel Mechanism Based on Craniotomy Experimental Data

 ,
,  ,
,  , ,
, , 
Abstract
:1. Introduction
1.1. Craniotomy
1.2. Robotic-Assisted Craniotomy
1.3. Objectives and Summary
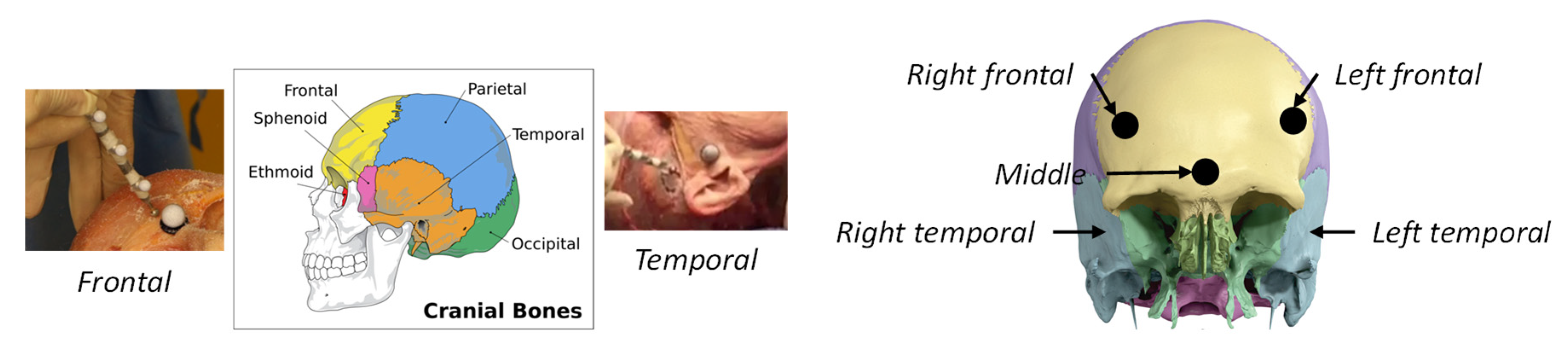
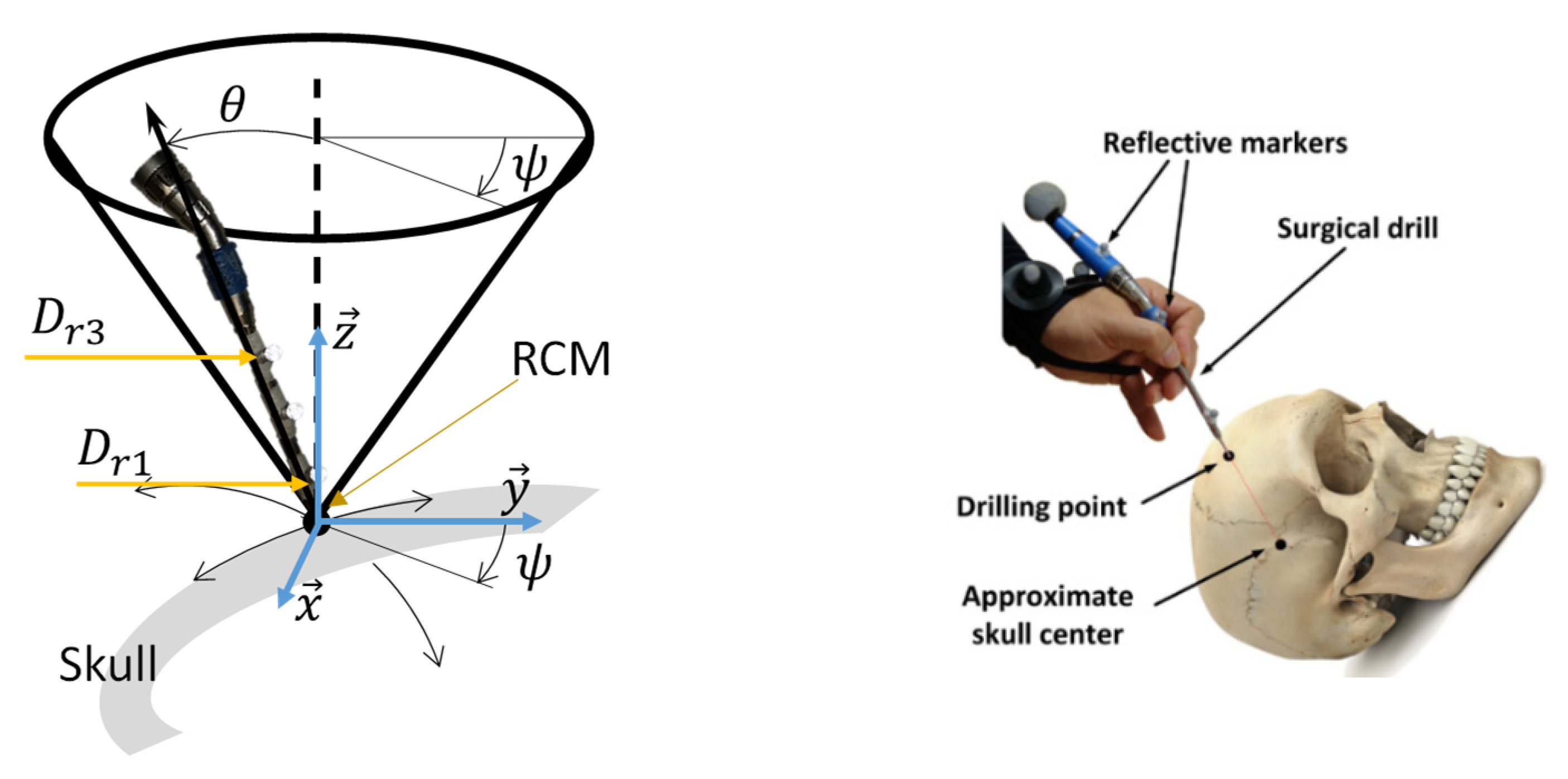
2. Craniotomy Gesture Analysis
2.1. Work Environment
2.2. Motion Capture Results
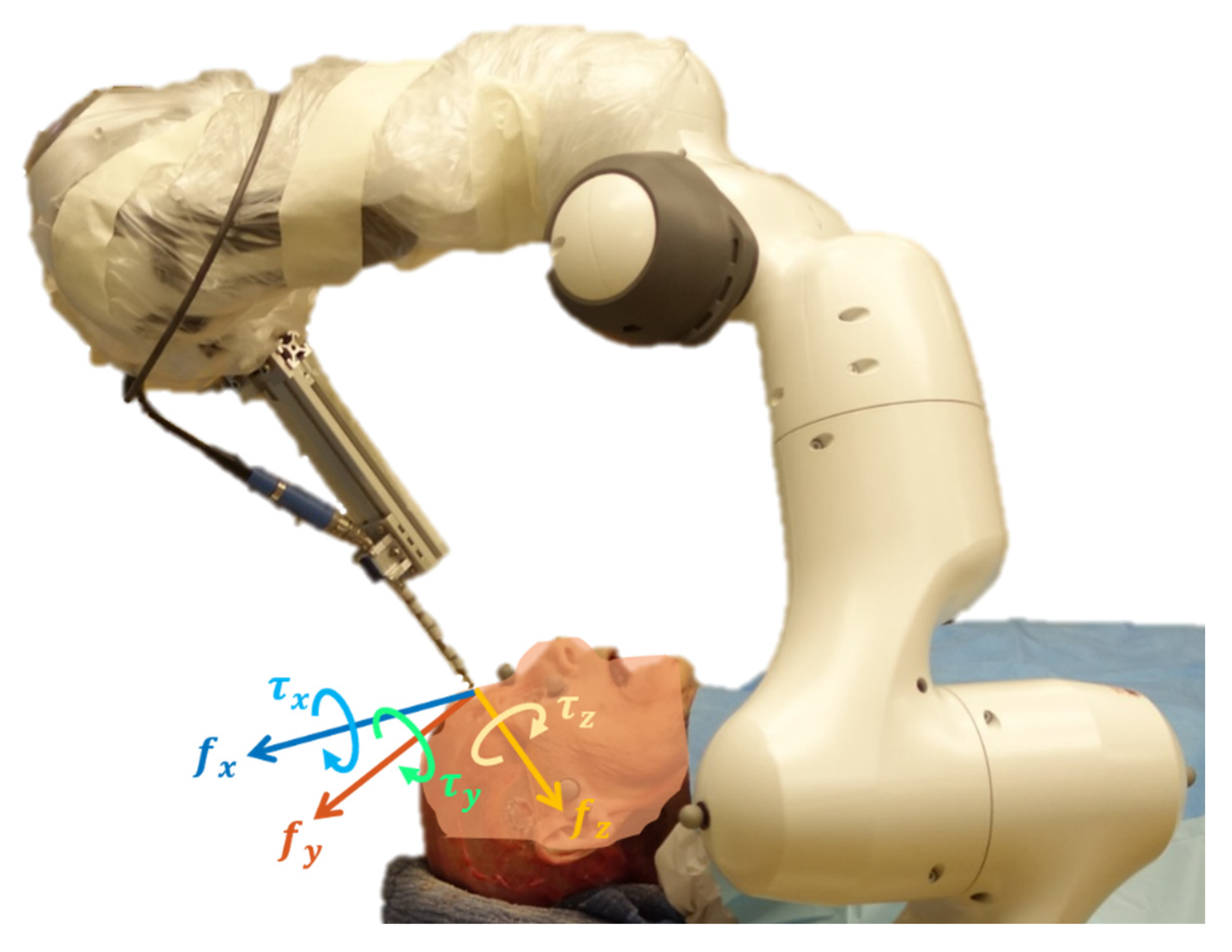
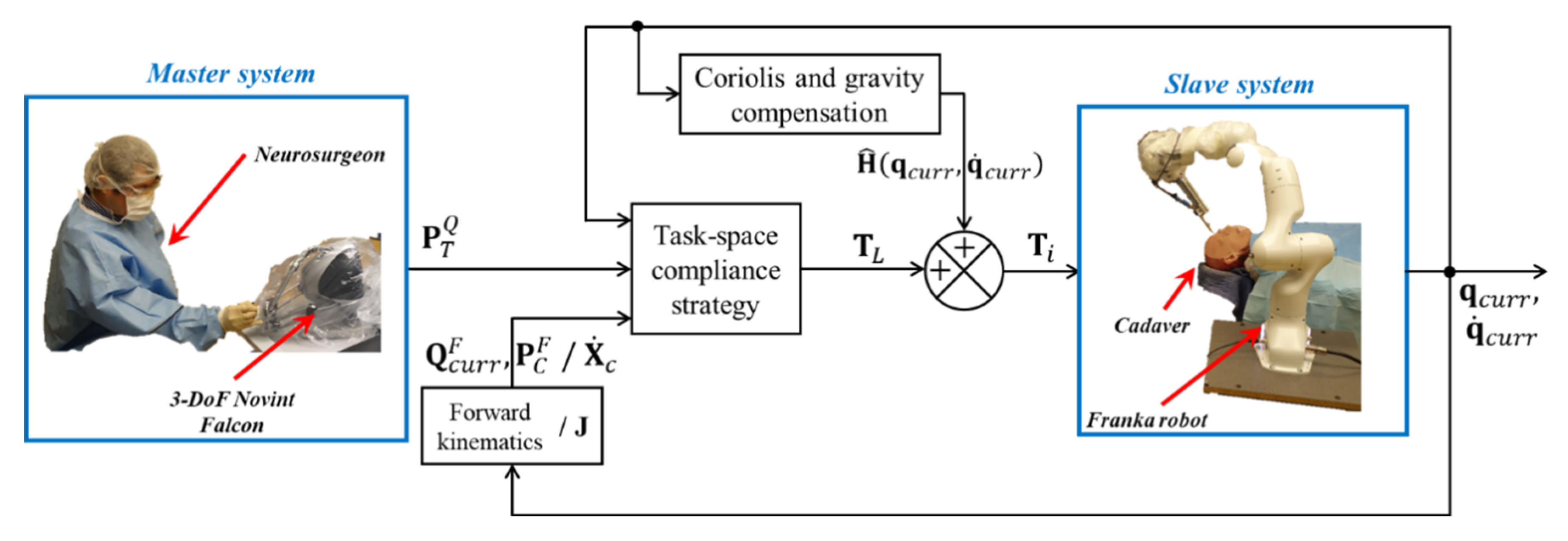
3. Craniotomy Interaction Forces Measurements
3.1. Forces Reconstruction through Torque-Based Cobot
3.2. Experimental Results
4. Craniotomy Trajectories by the Spherical Parallel Mechanism
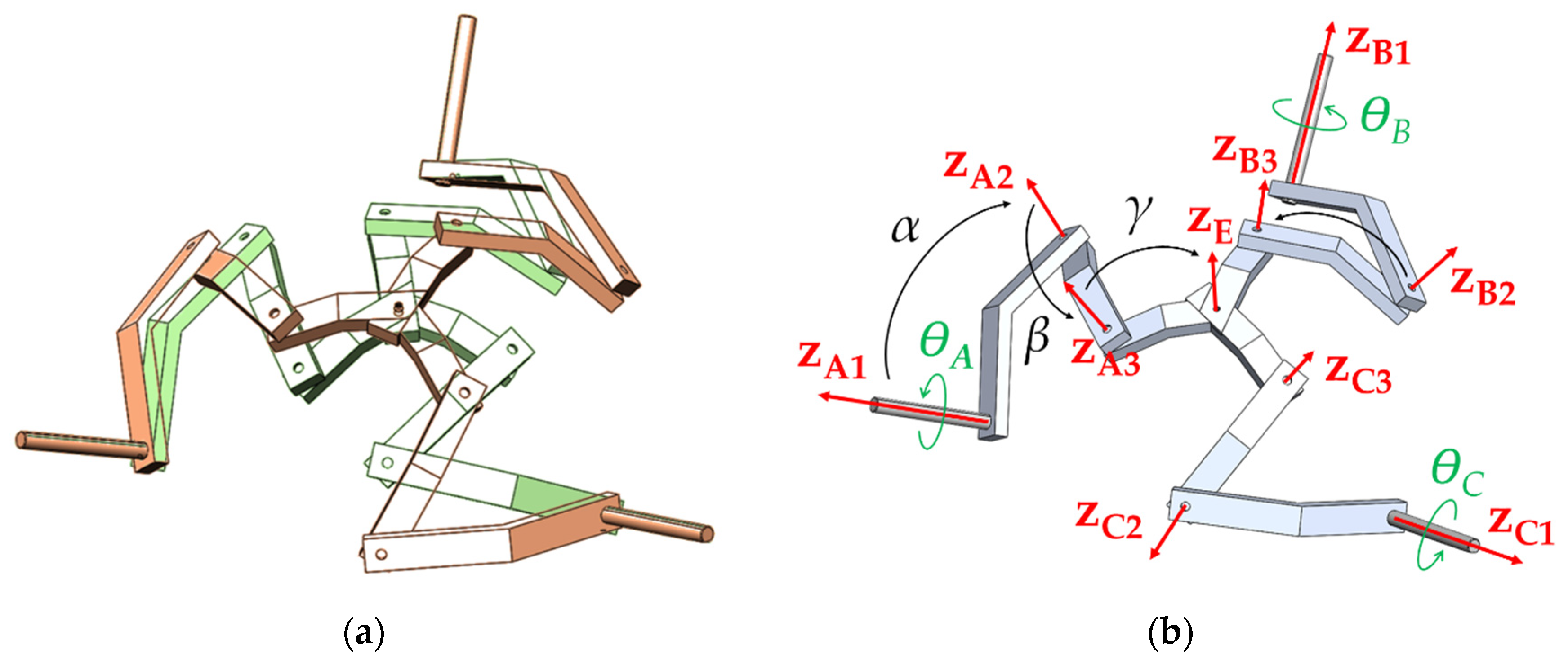
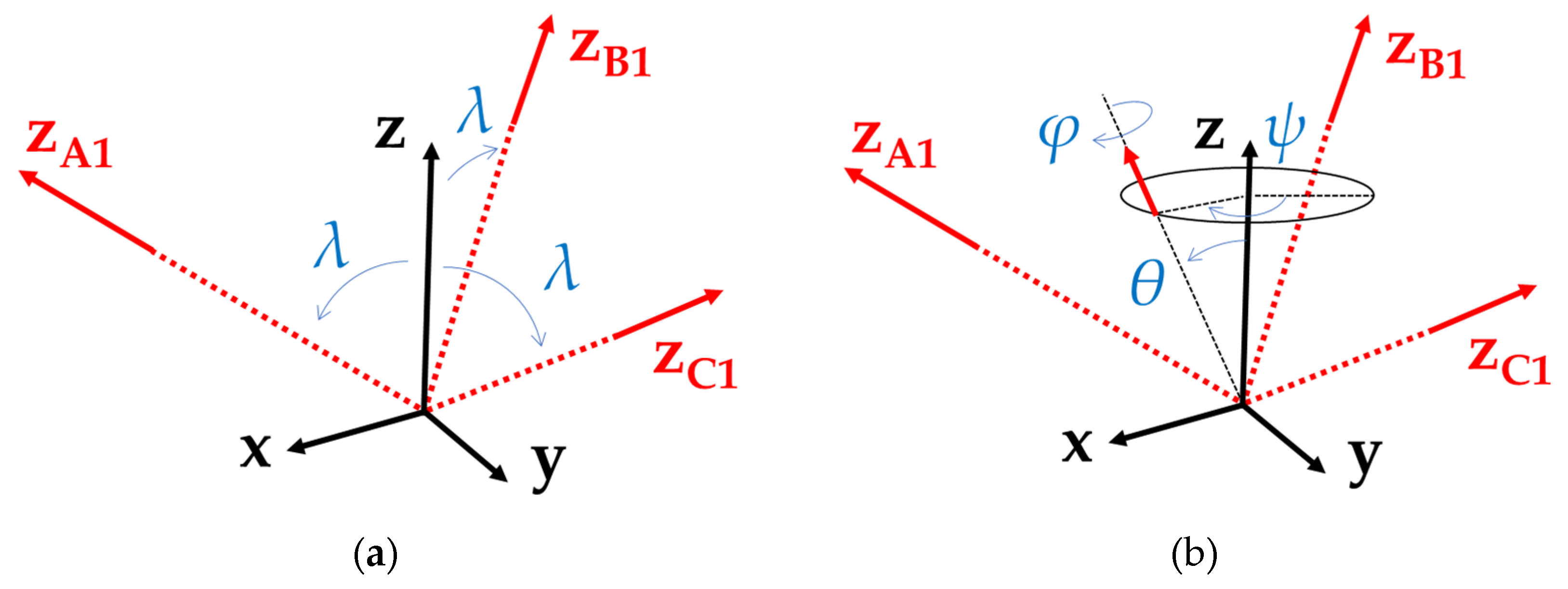
4.1. Kinematic and Static Analysis of the SPM
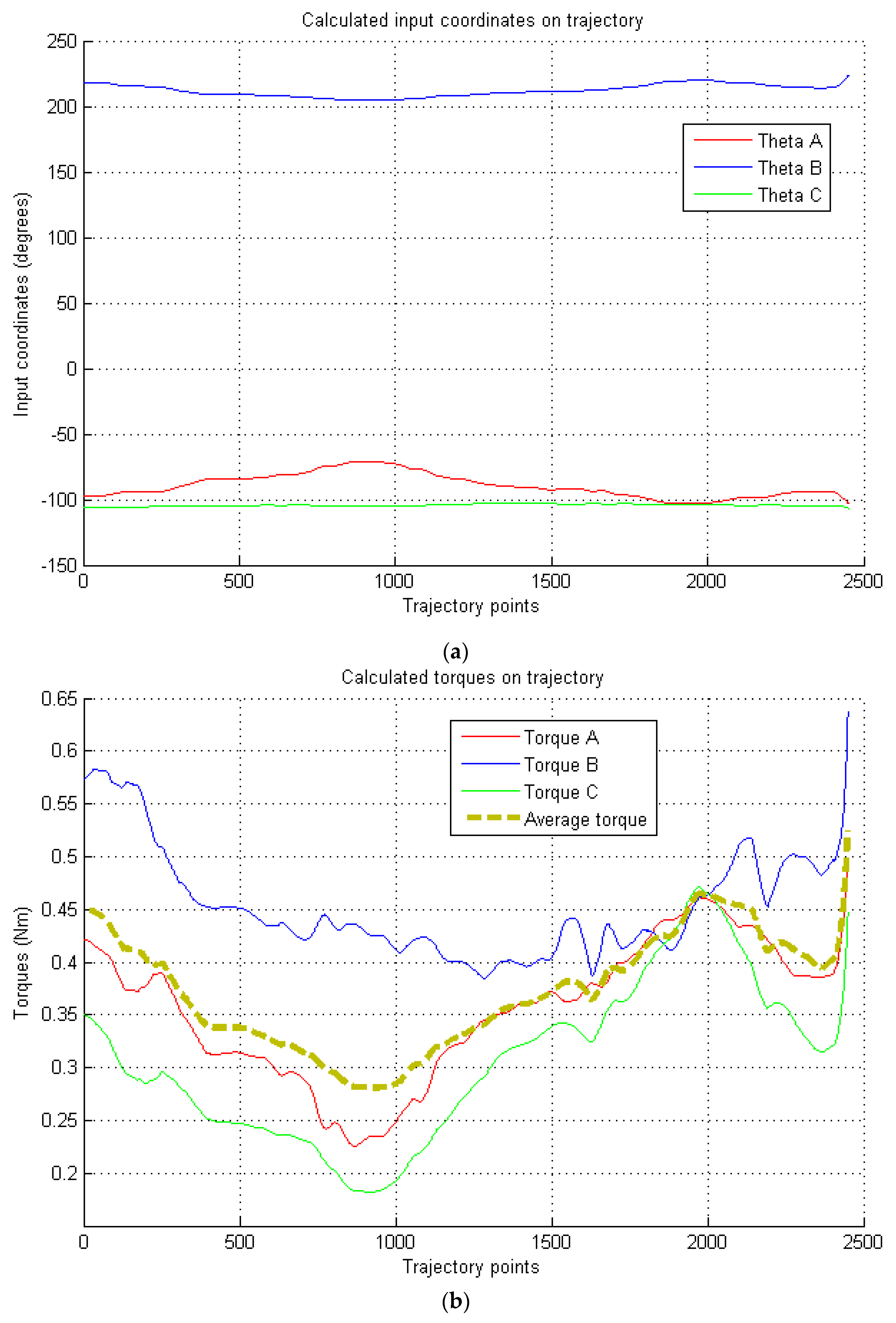
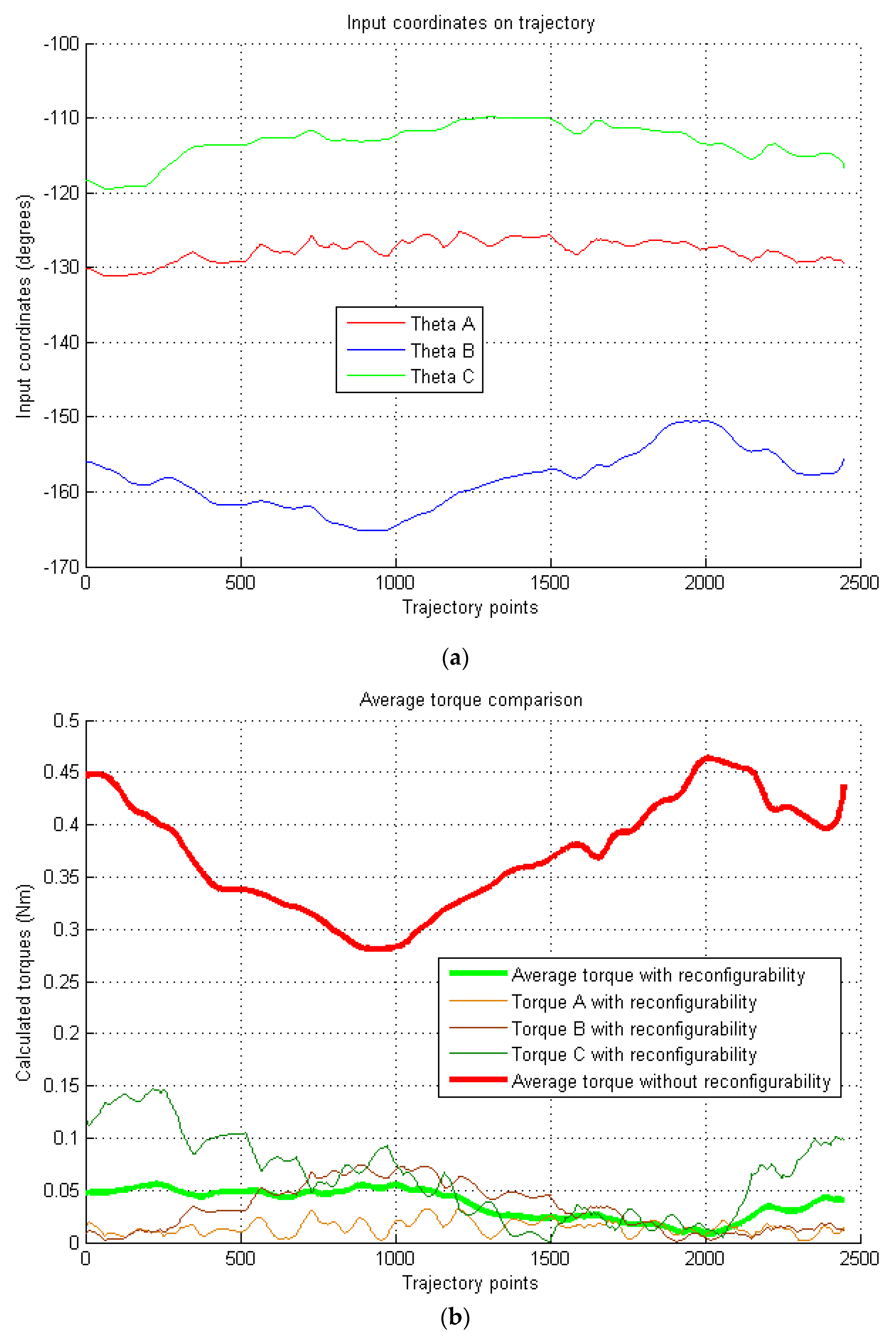
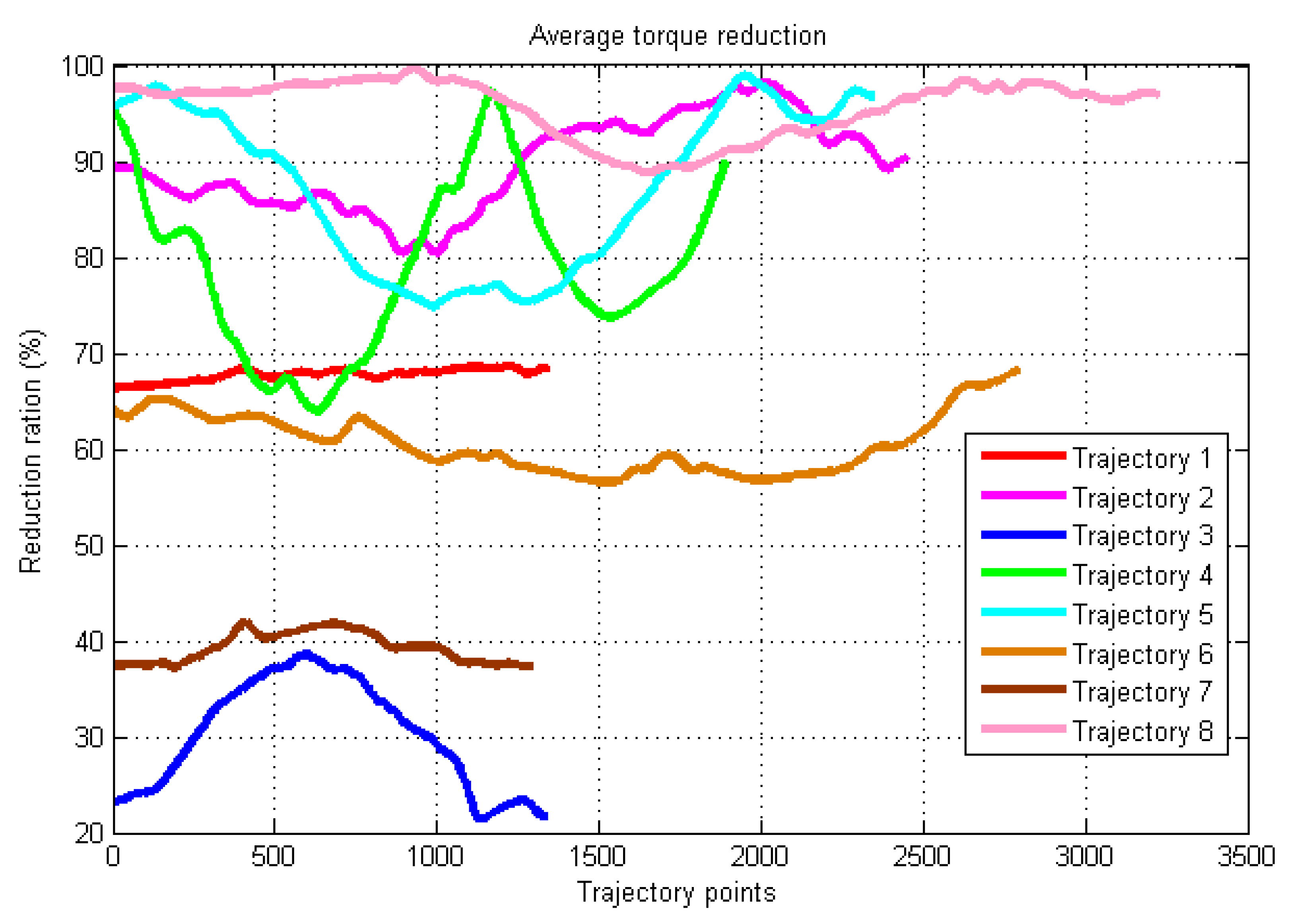
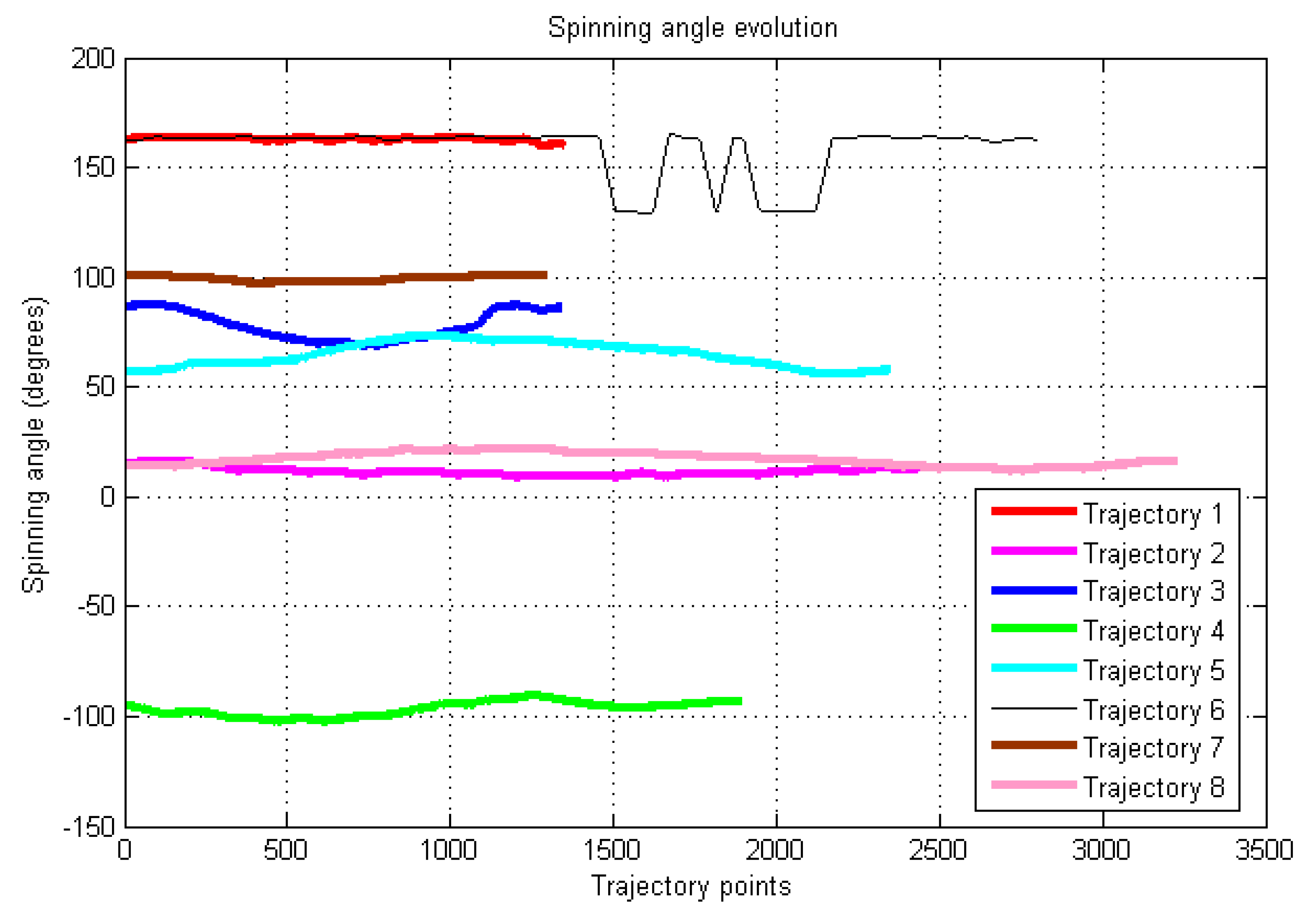
4.2. Torque Minimization Strategy
4.3. Results and Discussions
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Bast, P.; Popovic, A.; Wu, T.; Heger, S.; Engelhardt, M.; Lauer, W.; Radermacher, K.; Schmieder, K. Robot-and computer-assisted craniotomy: Resection planning, implant modelling and robot safety. Int. J. Med. Robot. Comput. Assist. Surg. 2006, 2, 168–178. [Google Scholar] [CrossRef] [PubMed]
- Hsiao, M.-H.; Kuo, C.-H. A Review to the Powered Drilling Devices for Craniotomy. J. Med. Devices 2012, 6, 017557. [Google Scholar] [CrossRef]
- Bofinger, G.; Wolfle, W. Skull Trepanation Drill. U.S. Patent No. 4,319,577, 6 March 1982. [Google Scholar]
- Ahola, J.J.; Harris, D.G. Blade Guard for a Surgical Tool. U.S. Patent No. 6,001,115, 14 December 1999. [Google Scholar]
- Burghart, C.; Raczkowsky, J.; Rembold, U.; Wörn, H. Robot Cell for Craniofacial Surgery. In Proceedings of the 24th Annual Conference of the IEEE Industrial Electronics Society, Aachen, Germany, 31 August–4 September 1998; pp. 2506–2511. [Google Scholar]
- Sim, C.; Ng, W.S.; Teo, M.Y.; Loh, Y.C.; Yeo, T.T. Image-Guided Manipulator Compliant Surgical Planning Methodology for Robotic Skull-Base Surgery. In Proceedings of the International Workshop on Medical Imaging and Augmented Reality, Hong Kong, China, 10–12 June 2001; pp. 26–29. [Google Scholar]
- Federspil, P.A.; Geisthoff, U.W.; Henrich, D.; Plinkert, P.K. Development of the First Force-Controlled Robot for Otoneurosurgery. Laryngoscope 2003, 113, 465–471. [Google Scholar] [CrossRef] [Green Version]
- Korb, W.; Engel, D.; Boesecke, R.; Eggers, G.; Kotrikova, B.; Marmulla, R.; Raczkowsky, J.; Wörn, H.; Mühling, J.; Hassfeld, S. Development and First Patient Trial of a Surgical Robot for Complex Trajectory Milling. Comput. Aided Surg. 2003, 8, 247–256. [Google Scholar] [CrossRef] [Green Version]
- Tsai, T.C.; Hsu, Y.L. Development of a Parallel Surgical Robot with Automatic Bone Drilling Carriage for Stereotactic Neurosurgery. Biomed. Eng. Appl. Basis Commun. 2007, 19, 269–277. [Google Scholar] [CrossRef]
- Matinfar, M.; Baird, C.; Batouli, A.; Clatterbuck, R.; Kazanzides, P. Robot-Assisted Skull Base Surgery. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems, San Diego, CA, USA, 29 October–2 November 2007; pp. 865–870. [Google Scholar]
- Cunha-Cruz, V.; Follmann, A.; Popovic, A.; Bast, P.; Wu, T.; Heger, S.; Engelhardt, M.; Schmieder, K.; Radermacher, K. Robot- and computer-assisted craniotomy (CRANIO): From active systems to synergistic man-machine interaction. Inst. Mech. Eng. Part H J. Eng. Med. 2010, 224, 441–452. [Google Scholar] [CrossRef] [PubMed]
- Kobler, J.P.; Kotlarski, J.; Öltjen, J.; Baron, S.; Ortmaier, T. Design and Analysis of a Head-Mounted Parallel Kinematic Device for Skull Surgery. Int. J. Comput. Assist. Radiol. Surg. 2012, 7, 137–149. [Google Scholar] [CrossRef] [PubMed]
- Li, G.-K.; Essomba, T.; Wu, C.-T.; Lee, S.-T.; Kuo, C.-H. Kinematic design and optimization of a novel dual-orthogonal remote center-of-motion mechanism for craniotomy. Inst. Mech. Eng. Part H J. Mech. Eng. Sci. 2016, 231, 1129–1145. [Google Scholar] [CrossRef]
- Essomba, T.; Hsu, Y.; Sandoval-Arevalo, J.S.; Laribi, M.A.; Zeghloul, S. Kinematic Optimization of a Reconfigurable Spherical Parallel Mechanism for Robotic-Assisted Craniotomy. ASME J. Mech. Robot. 2019, 11, 060905. [Google Scholar] [CrossRef]
- Albu-Schaffer, A.; Ott, C.; Frese, U.; Hirzinger, G. Cartesian impedance control of redundant robots: Recent results with the DLR-light-weight-arms. In Proceedings of the 2003 IEEE International Conference on Robotics and Automation, Taipei, Taiwan, 14–19 September 2003; Volume 3, pp. 3704–3709. [Google Scholar] [CrossRef]
- Essomba, T.; Laribi, M.A.; Zeghloul, S.; Poisson, G. Optimal synthesis of a spherical parallel mechanism for medical application. Robotica 2016, 34, 671–686. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Trajectories | Original Torque Averages (Nm) | Optimized Torque Averages (Nm) | Reduction (%) | |||
|---|---|---|---|---|---|---|
| Min | Max | Min | Max | Min | Max | |
| 1 | 3.32 | 3.51 | 1.05 | 1.18 | 66.4 | 68.7 |
| 2 | 3.65 | 6.02 | 0.11 | 0.72 | 80.4 | 98.2 |
| 3 | 2.82 | 2.85 | 1.76 | 2.22 | 21.4 | 38.6 |
| 4 | 2.75 | 2.87 | 0.08 | 1.03 | 63.9 | 97.3 |
| 5 | 3.41 | 3.65 | 0.04 | 0.87 | 74.9 | 98.9 |
| 6 | 3.37 | 3.70 | 1.07 | 1.55 | 56.6 | 68.3 |
| 7 | 2.80 | 2.87 | 1.65 | 1.77 | 37.2 | 41.9 |
| 8 | 6.05 | 14.47 | 0.04 | 0.71 | 88.8 | 99.7 |
| Total | 2.75 | 14.47 | 0.04 | 2.22 | 21.4 | 99.7 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Essomba, T.; Sandoval, J.; Laribi, M.A.; Wu, C.-T.; Breque, C.; Zeghloul, S.; Richer, J.-p. Torque Reduction of a Reconfigurable Spherical Parallel Mechanism Based on Craniotomy Experimental Data. Appl. Sci. 2021, 11, 6534. https://doi.org/10.3390/app11146534
Essomba T, Sandoval J, Laribi MA, Wu C-T, Breque C, Zeghloul S, Richer J-p. Torque Reduction of a Reconfigurable Spherical Parallel Mechanism Based on Craniotomy Experimental Data. Applied Sciences. 2021; 11(14):6534. https://doi.org/10.3390/app11146534
Chicago/Turabian StyleEssomba, Terence, Juan Sandoval, Med Amine Laribi, Chieh-Tsai Wu, Cyril Breque, Saïd Zeghloul, and Jean-pierre Richer. 2021. "Torque Reduction of a Reconfigurable Spherical Parallel Mechanism Based on Craniotomy Experimental Data" Applied Sciences 11, no. 14: 6534. https://doi.org/10.3390/app11146534
APA StyleEssomba, T., Sandoval, J., Laribi, M. A., Wu, C.-T., Breque, C., Zeghloul, S., & Richer, J.-p. (2021). Torque Reduction of a Reconfigurable Spherical Parallel Mechanism Based on Craniotomy Experimental Data. Applied Sciences, 11(14), 6534. https://doi.org/10.3390/app11146534