Using Remote Sensing Data to Identify Large Bottom Objects: The Case of World War II Shipwreck of General von Steuben


Abstract
1. Introduction
2. History of the General von Steuben
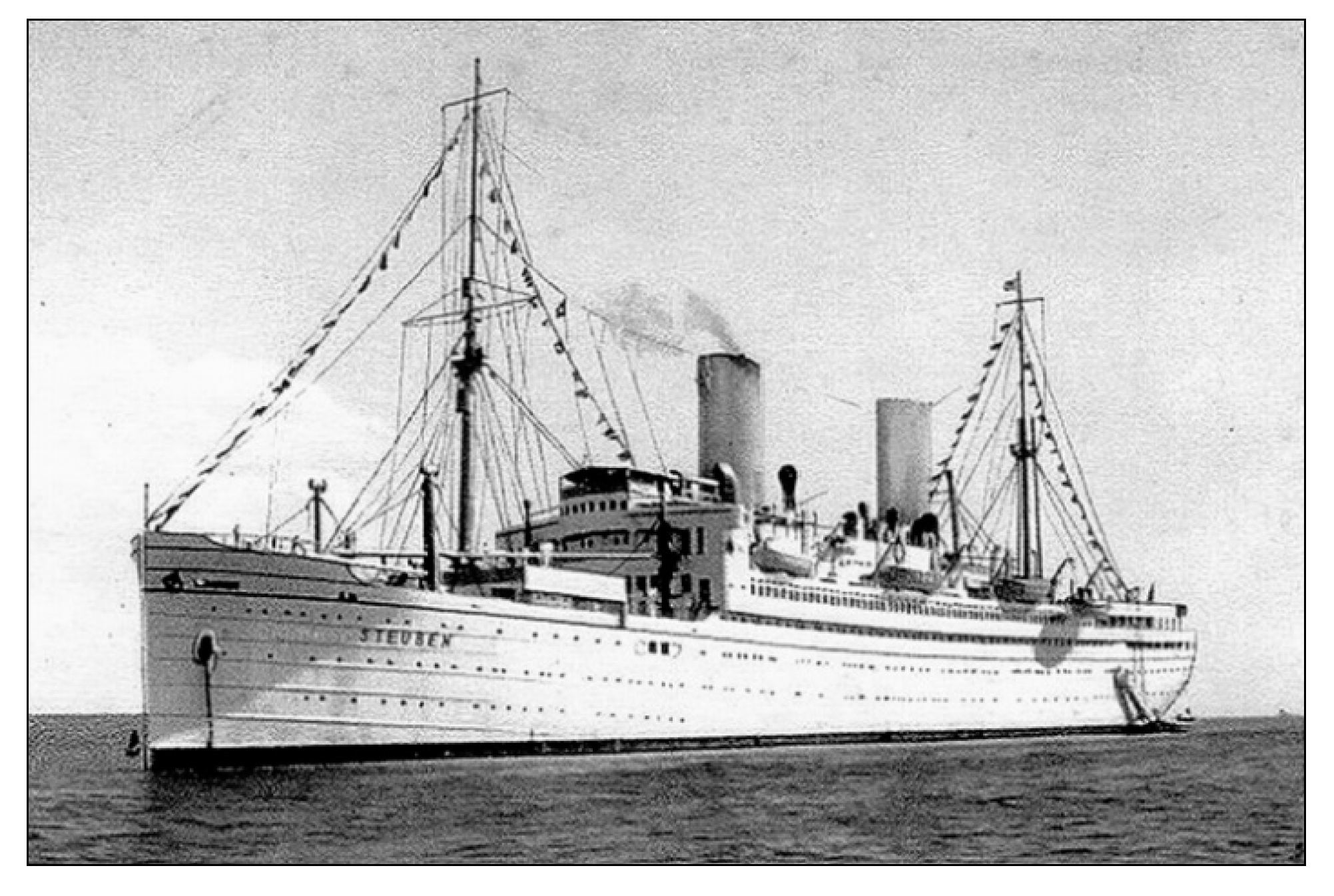
2.1. Early History
2.2. The Sinking of the General von Steuben
3. Materials and Methods
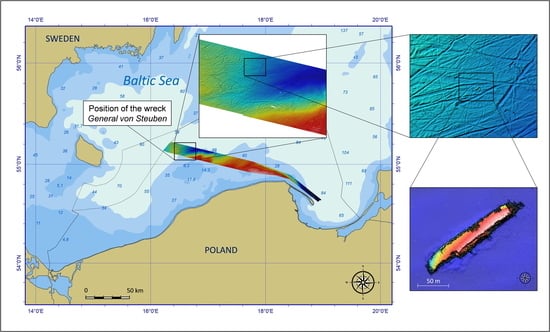
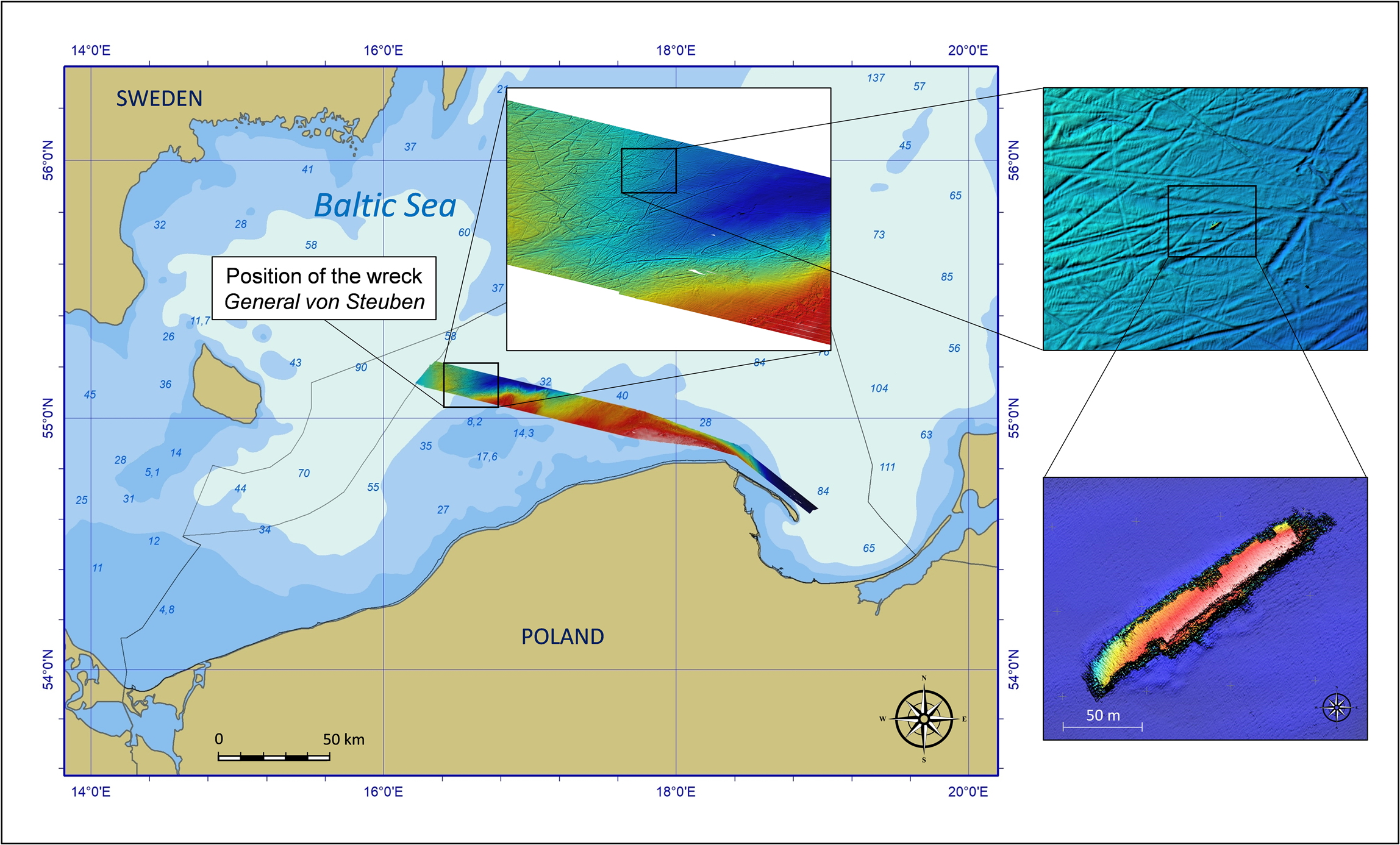
3.1. Discovery of the Shipwreck
3.2. Survey Planning
3.3. Mapping the Shipwreck-Site
4. Results and Discussion
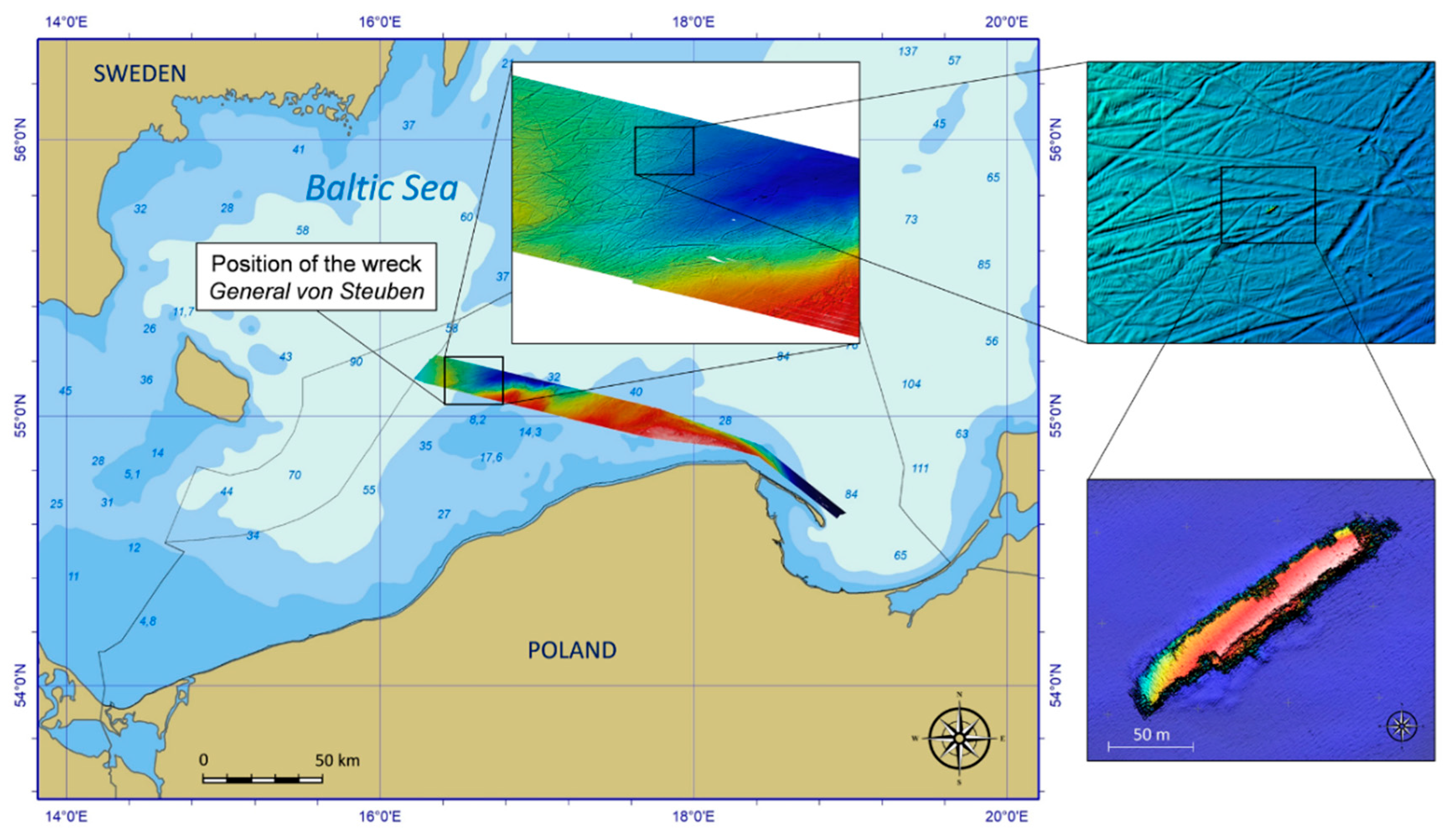
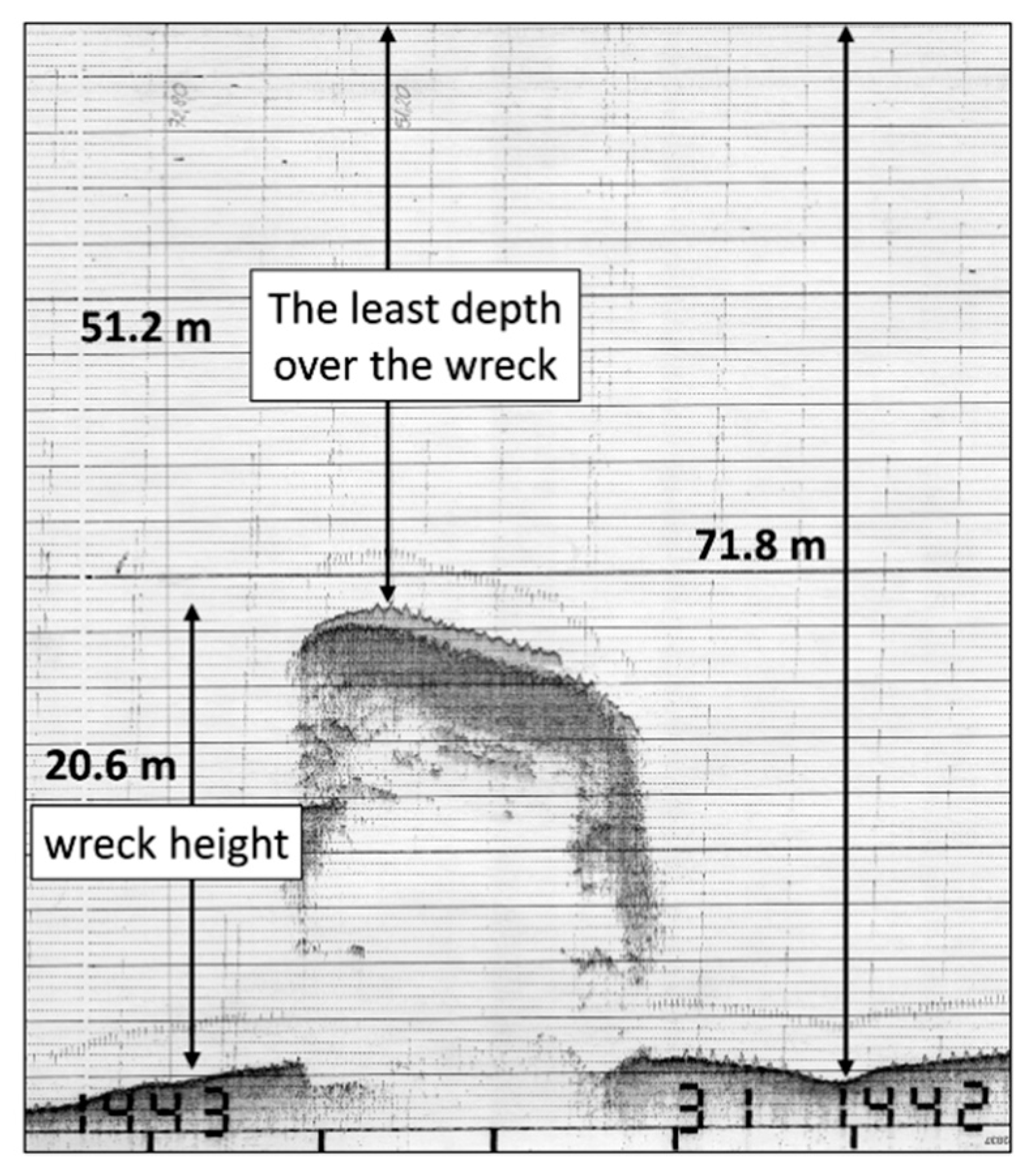
4.1. Bathymetric Data
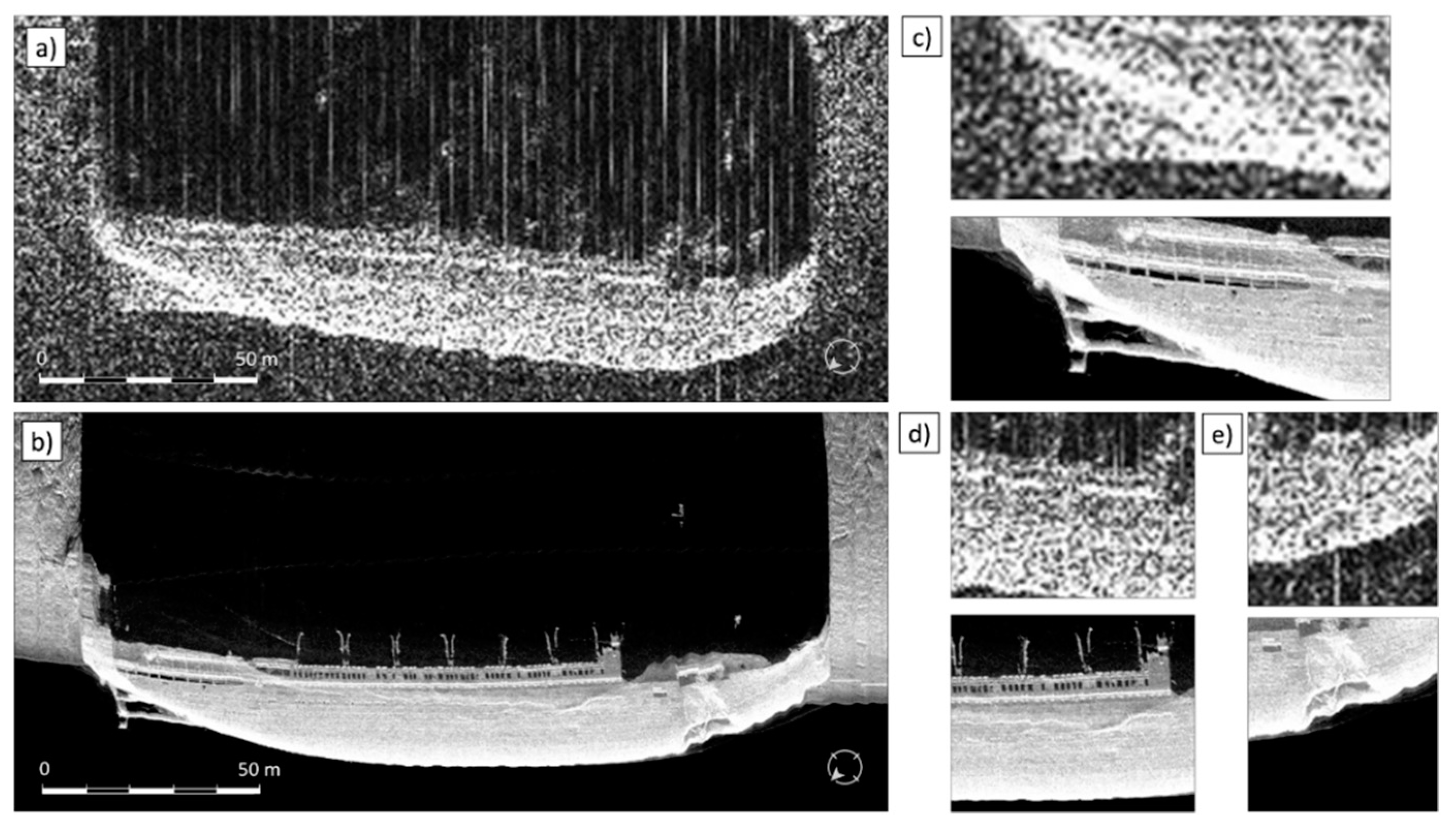
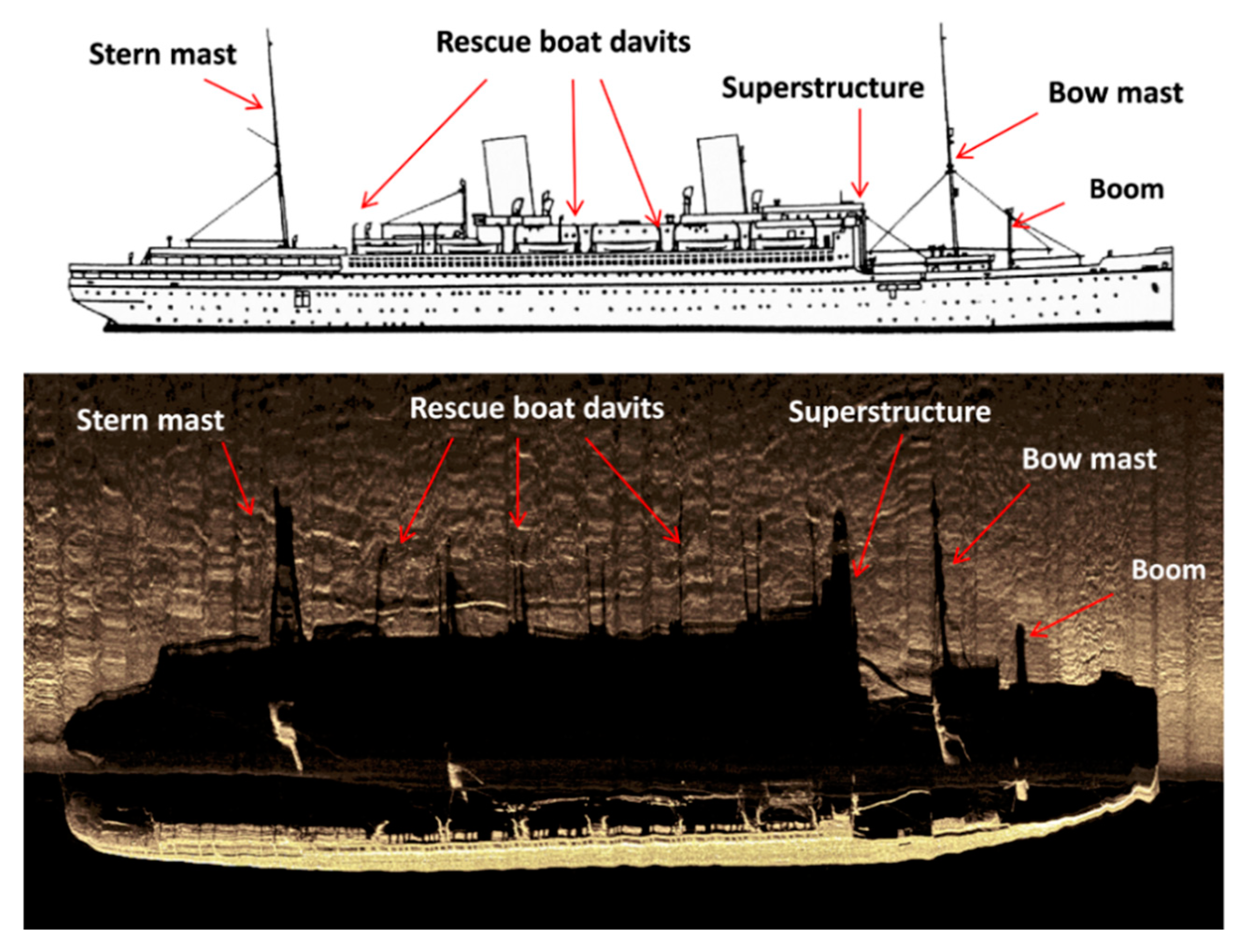
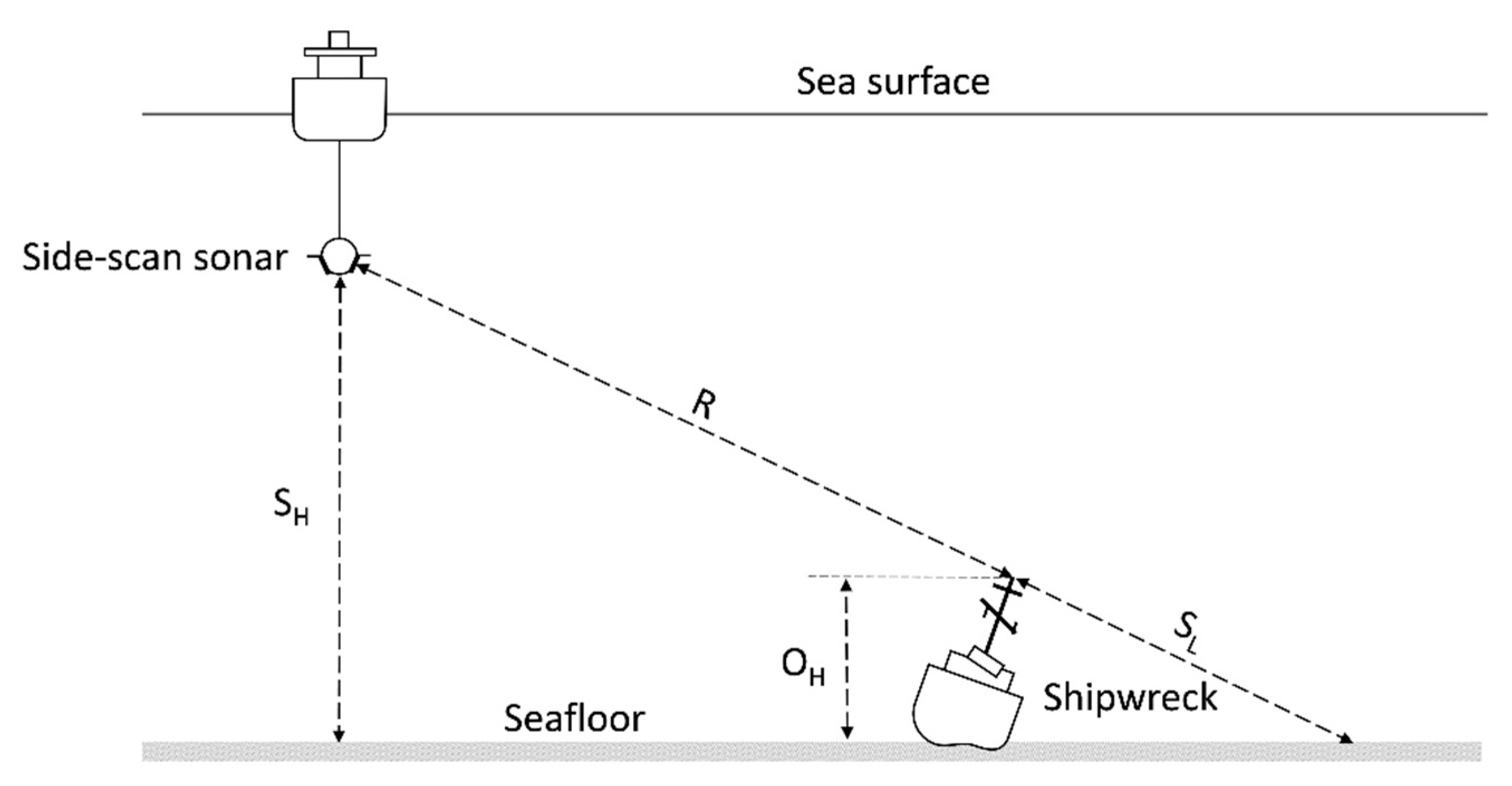
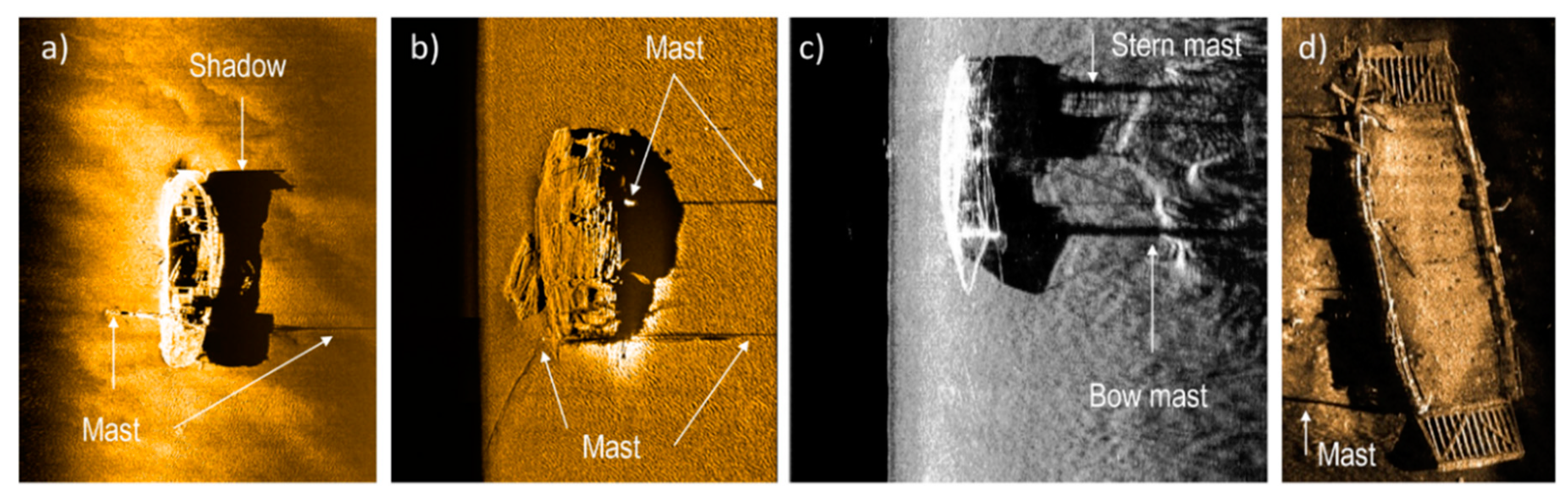
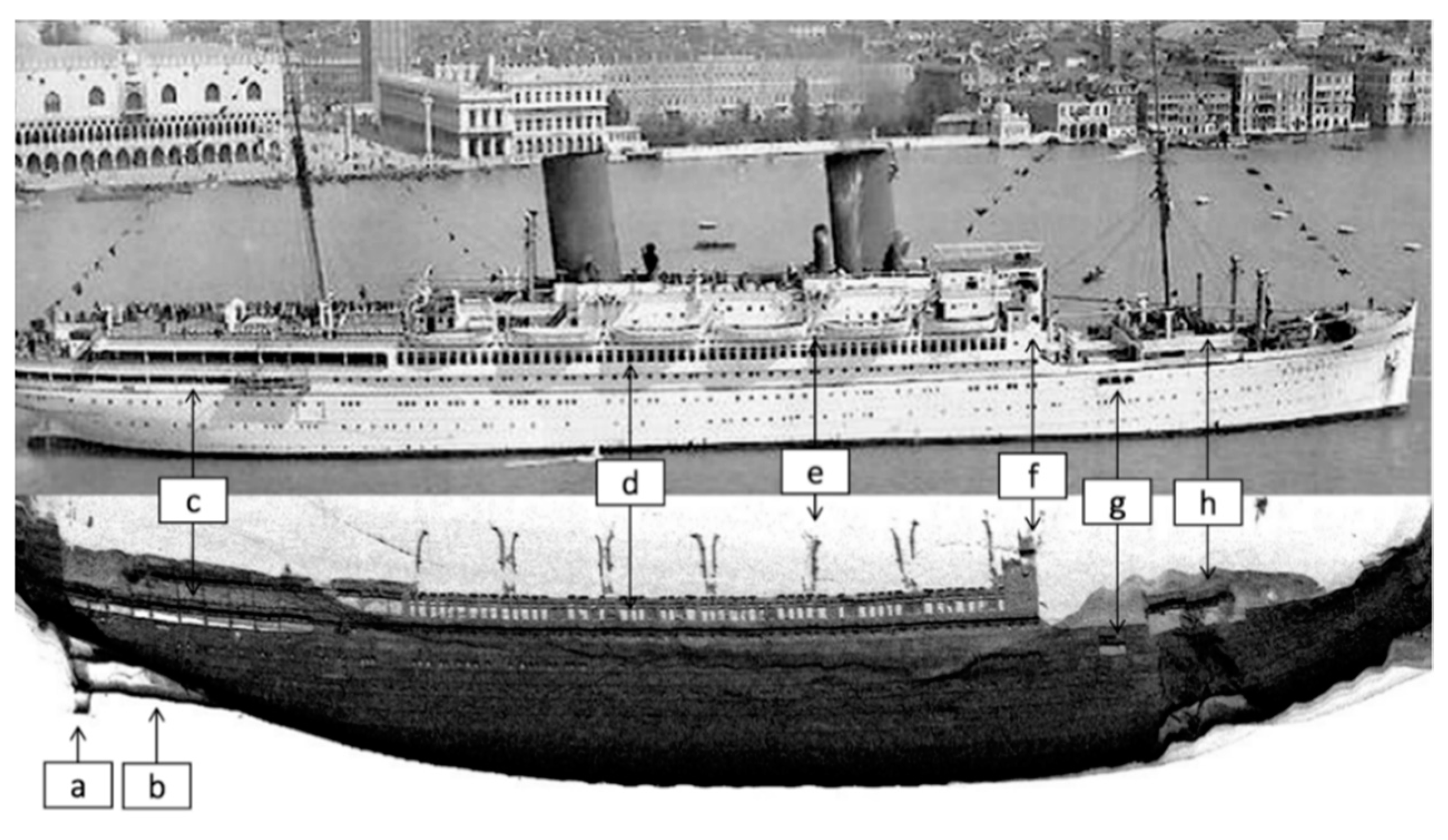
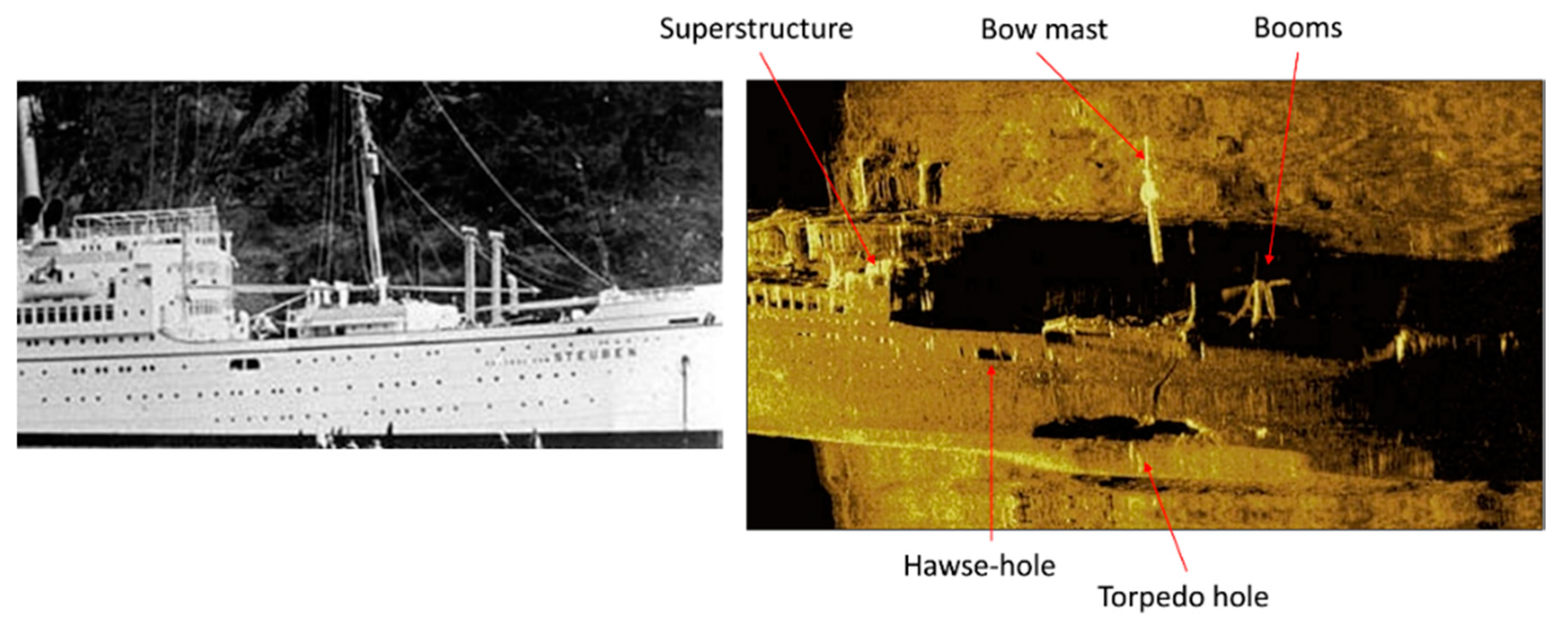
4.2. Side-Scan Sonar Records and Wreck’s Identification
5. Conclusions
Funding
Acknowledgments
Conflicts of Interest
References
- Ødegård, Ø.; Sørensen, A.; Hansen, R.; Ludvigsen, M. A new method for underwater archaeological surveying using sensors and unmanned platforms. IFAC-PapersOnLine 2016, 49, 486–493. [Google Scholar] [CrossRef]
- Hutchinson, G. Threats to underwater cultural heritage. Mar. Policy 1996, 20, 287–290. [Google Scholar] [CrossRef]
- Starnawski, K.; Poleszak, S. The dangers of diving in the sea. In Baltic Wrecks: Guide for Divers; Poleszak, S., Ed.; Eliza Poleszak: Gdynia, Poland, 2005; pp. 41–58. ISBN 83-920563-1-0. [Google Scholar]
- Duck, B.; Klein, R.S. Shipwrecks of the Dominican Republic and A Guide to Shipwreck Identification through Recovered Artifacts, 1st ed.; Lulu Press: Morrisville, NC, USA, 2010; 156p, ISBN 978-0-9829477-0-8. [Google Scholar]
- Dierssen, H.M.; Theberge, A.E., Jr. Bathymetry: History of Seafloor Mapping. In Encyclopedia of Natural Resources. Vol. II—Water and Air, 1st ed.; Wang, Y., Raton, B., Eds.; Taylor & Francis Group: Milton Park, UK, 2014; p. 564. [Google Scholar] [CrossRef]
- Bates, C.R.; Lawrence, M.; Dean, M.; Robertson, P. Geophysical Methods for Wreck-Site Monitoring: The Rapid Archaeological Site Surveying and Evaluation (RASSE) programme. Int. J. Naut. Archaeol. 2011, 40, 404–416. [Google Scholar] [CrossRef]
- Brown, C.J.; Blondel, P. Developments in the application of multibeam sonar backscatter for seafloor habitat mapping. Appl. Acoust. 2009, 70, 1242–1247. [Google Scholar]
- Janowski, L.; Trzcinska, K.; Tegowski, J.; Kruss, A.; Rucinska-Zjadacz, M.; Pocwiardowski, P. Nearshore Benthic Habitat Mapping Based on Multi-Frequency, Multibeam Echosounder Data Using a Combined Object-Based Approach: A Case Study from the Rowy Site in the Southern Baltic Sea. Remote Sens. 2018, 10, 1983. [Google Scholar] [CrossRef]
- Huang, J. Maritime archaeology and identification of historic shipwrecks: A legal perspective. Mar. Policy 2014, 44, 256–264. [Google Scholar] [CrossRef]
- Berg, D. Shipwreck Diving; Instant Downloadable E-Book; Aqua Explorers: Baldwin, NY, USA, 2015; p. 90. ISBN 0-9616167-5-X. [Google Scholar]
- Keatts, H.; Skerry, B. Complete Wreck Diving: A Guide to Diving Wrecks, 1st ed.; Aqua Quest Publications: Locust Valley, NY, USA, 1999; p. 270. ISBN 10: 0922769389. [Google Scholar]
- Grabiec, D.; Olejnik, A. Searching for and identifying underwater objects. In Baltic Wrecks: Guide for Divers; Poleszak, S., Ed.; Eliza Poleszak: Gdynia, Poland, 2005; pp. 81–105. ISBN 83-920563-1-0. [Google Scholar]
- Foley, B.P.; Dellaporta, K.; Sakellariou, D.; Bingham, B.S.; Camilli, R.; Eustice, R.M.; Evagelistis, D.; Ferrini, V.L.; Katsaros, K.; Kourkoumelis, D.; et al. The 2005 Chios Ancient Shipwreck Survey: New Methods for Underwater Archaeology. Hesperia J. Am. Sch. Class. Stud. Athens 2009, 78, 269–305. [Google Scholar] [CrossRef]
- Buscombe, D. Shallow water benthic imaging and substrate characterization using recreational-grade sidescan-sonar. Environ. Model. Softw. 2017, 89, 1–18. [Google Scholar]
- Burguera, A.; Oliver, G. High-Resolution Underwater Mapping Using Side-Scan Sonar. PLoS ONE 2016, 11, e0146396. [Google Scholar] [CrossRef]
- Healy, C.A.; Schultz, J.J.; Parker, K. Detecting Submerged Bodies: Controlled Research Using Side-Scan Sonar to Detect Submerged Proxy Cadavers. J. Forensic Sci. 2015, 60, 743–752. [Google Scholar] [CrossRef]
- Bryant, R. Side Scan Sonar for Hydrography-An Evaluation by the Canadian Hydrographic Service. Int. Hydrogr. Rev. 2015, 52, 43–55. [Google Scholar]
- Nakamura, K.; Toki, T.; Mochizuki, N. Discovery of a new hydrothermal vent based on an underwater, high-resolution geophysical survey. Deep Sea Res. Part I Oceanogr. Res. Pap. 2013, 74, 1–10. [Google Scholar] [CrossRef]
- Johnson, H.; Helferty, M. The geological interpretation of side-scan sonar. Rev. Geophys. 1990, 28, 357–380. [Google Scholar] [CrossRef]
- Grooss, P. The Naval War in the Baltic 1939–1945; Naval Institute Press: Barnsley, UK, 2017; 416p, ISBN 10: 152670000X. [Google Scholar]
- Gelewski, T.M. Wilhelm Gustloff i General von Steuben Statki Śmierci czy Zbrodnia Wojenna na Morzu? A.E.L. Publishing House: Gdańsk, Poland, 1997; ISBN 83-903896-4-9. (In Polish) [Google Scholar]
- General von Steuben. Available online: www.danzig-online.pl/gustloff/steubene.html (accessed on 17 March 2020).
- Tagliati, M. General von Steuben. X-Ray Mag 2005, 8, 71–77. Available online: https://xray-mag.com/pdfs/xray08/X-Ray8_Adobe6.pdf (accessed on 25 February 2020).
- Jamkowski, M. Duchy z Głębin Bałtyku. Steuben, Gustloff, Goya; Świat Książki: Warszawa, Poland, 2010; pp. 1–303. ISBN 978-83-247-1803-0. (In Polish) [Google Scholar]
- Ostasz, A. Ostatnie wielkie odkrycie na Bałtyku. Steuben. In Nurkowanie; OKTO Sp. z o.o.: Szczecin, Poland, 2004; Volume 8, pp. 15–21. (In Polish) [Google Scholar]
- Prince, C.J. Death in the Baltic: The World War II Sinking of the Wilhelm Gustloff, 1st ed.; Palgrave MacMillan: New York, NY, USA, 2013; 256p, ISBN 13: 9780230341562. [Google Scholar]
- Grządziel, A. Possibilities of Using Hydrographic Side Scan Sonar to Conduct Mine Counter-Measure Tasks. Master’s Thesis, Polish Naval Academy, Gdynia, Poland, 2007. (In Polish). [Google Scholar]
- International Hydrographic Organization. Manual on Hydrography, 1st ed.; Publication C-13; International Hydrographic Bureau: Monaco, 2005; p. 202. [Google Scholar]
- Held, P.; Schneider von Deimling, J. New Feature Classes for Acoustic Habitat Mapping—A Multibeam Echosounder Point Cloud Analysis for Mapping Submerged Aquatic Vegetation (SAV). Geosciences 2019, 9, 235. [Google Scholar] [CrossRef]
- Mohammadloo, T.H.; Snellen, M.; Renoud, W.; Beaudoin, J.; Simons, D.G. Correcting Multibeam Echosounder Bathymetric Measurements for Errors Induced by Inaccurate Water Column Sound Speeds. IEEE Access 2019, 7, 122052–122068. [Google Scholar] [CrossRef]
- Grządziel, A.; Wąż, M. Estimation of Effective Swath Width for Dual-Head Multibeam Echosounder. Annu. Navig. 2016, 23, 173–183. [Google Scholar] [CrossRef]
- Grządziel, A.; Wąż, M. System echosondy wielowiązkowej w pomiarach batymetrycznych planowanych tras żeglugowych. Logistyka 2014, 6, 4250–4256. Available online: https://www.researchgate.net/profile/Artur_Grzadziel/research (accessed on 18 March 2020).
- Demer, D.A.; Berger, L.; Bernasconi, M.; Bethke, E.; Boswell, K.; Chu, D.; Domokos, R.; Dunford, A.; Fassler, S.; Gauthier, S.; et al. Calibration of Acoustic Instruments; ICES Cooperative Research Report No. 326; International Council for the Exploration of the Sea (ICES): Copenhagen, Denmark, 2015; 133p. [Google Scholar] [CrossRef]
- von Rönn, G.A.; Schwarzer, K.; Reimers, H.-C.; Winter, C. Limitations of Boulder Detection in Shallow Water Habitats Using High-Resolution Sidescan Sonar Images. Geosciences 2019, 9, 390. [Google Scholar]
- Grøn, O.; Boldreel, L.O.; Cvikel, D.; Kahanov, Y.; Galili, E.; Hermand, J.-P.; Nævestad, D.; Reitan, M. Detection and mapping of shipwrecks embedded in sea-floor sediments. J. Archaeol. Sci. Rep. 2015, 4, 242–251. [Google Scholar] [CrossRef]
- Lubis, M.J. Using Side Scan Sonar Instrument for Seabed Identification with Pattern Discrete Equi Spaced Unshaded Line Array (Pdesula) Model. J. Oceanogr. Mar. Res. 2017, 5. [Google Scholar] [CrossRef]
- Tamsett, D.; Hogarth, P. Sidescan sonar beam function and seabed backscatter functions from trace amplitude and vehicle roll data. IEEE J. Ocean. Eng. 2015, 411, 155–163. [Google Scholar] [CrossRef]
- Kolouch, D. Interferometric Side-Scan Sonar. A Topographic Sea-Floor Mapping System. Int. Hydrogr. Rev. 1984, 64, 36–49. [Google Scholar]
- Shang, X.; Zhao, J.; Zhang, H. Obtaining High-Resolution Seabed Topography and Surface Details by Co-Registration of Side-Scan Sonar and Multibeam Echo Sounder Images. Remote Sens. 2019, 11, 1496. [Google Scholar] [CrossRef]
- Singh, H.; Adams, J.; Mindell, D.; Foley, B. Imaging Underwater for Archaeology. J. Field Archaeol. 2000, 27, 319–328. [Google Scholar] [CrossRef]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Characteristics |
|---|---|
| Name | 1923: Munchen, 1930: General von Steuben, 1938: Steuben |
| Type | Passenger ship |
| Tonnage | 14,660 BRT |
| Dimension | Length 168 m, beam 19.8 m, draft 8.5 m |
| Speed | 16 kts |
| Launched | 1922 |
| Shipyard | Vulcan in Szczecin |
| Propulsion | Steam reciprocating, exhaust turbine, twin propellers; 11,000 hp |
| Fate | Sunk 10 February 1945 |
© 2020 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Grządziel, A. Using Remote Sensing Data to Identify Large Bottom Objects: The Case of World War II Shipwreck of General von Steuben. Geosciences 2020, 10, 240. https://doi.org/10.3390/geosciences10060240
Grządziel A. Using Remote Sensing Data to Identify Large Bottom Objects: The Case of World War II Shipwreck of General von Steuben. Geosciences. 2020; 10(6):240. https://doi.org/10.3390/geosciences10060240
Chicago/Turabian StyleGrządziel, Artur. 2020. "Using Remote Sensing Data to Identify Large Bottom Objects: The Case of World War II Shipwreck of General von Steuben" Geosciences 10, no. 6: 240. https://doi.org/10.3390/geosciences10060240
APA StyleGrządziel, A. (2020). Using Remote Sensing Data to Identify Large Bottom Objects: The Case of World War II Shipwreck of General von Steuben. Geosciences, 10(6), 240. https://doi.org/10.3390/geosciences10060240