Abstract
This paper investigates the adaptive fuzzy leader-following consensus control problem for a class of high-order nonlinear multi-agent systems with quantized input signals. Considering the complex dynamics of high-order nonlinear multi-agent systems, a novel adaptive fuzzy control strategy with equivalent virtual controller is proposed to achieve the consensus tracking performance and guarantee the uniform ultimate boundedness of the closed-loop nonlinear system. During the control design process, only the states information from the subsystem itself and its neighbors and part of the information from the reference signals are available. In addition, the hysteresis quantizer is utilized to reduce the chattering phenomenon. Finally, a numerical simulation example is given to show the effectiveness of the proposed control strategy.
1. Introduction
The consensus control problem for multi-agent systems has gained considerable attention in recent years due to their wide applications in practical scenarios [1,2]. For instance, in the domain of emergency management [3], consensus algorithms can optimize the coordinated evacuation behavior of individual agents such as rescue robots or human groups, thereby significantly enhancing overall safety and operational efficiency. In intelligent transportation systems [4,5], these algorithms can achieve optimal control of unmanned vehicle platoons and improve road capacity. Furthermore, the underlying principles enable sophisticated agent coordination through swarm intelligence, with potential applications ranging from automated warehouse logistics to large-scale environmental monitoring. This wide range of practical applications provides a strong motivation for following research aimed at enhancing the robustness and efficiency of consensus control strategies. The main objective of the problem is to design appropriate controllers for each subsystem such that all the followers can track a common leader or that the output of each subsystem tracks a common reference trajectory with the information from the subsystem itself and its neighbors.
Note that the information transmission among multi-agent systems is challenging [6,7,8,9,10], which is usually represented by a topology graph, and numerous efforts have been devoted to investigating the transmission mechanism. To mention a few, based on the topology graph theory, the authors in ref. [11] investigated the consensus tracking control problem for a class of first-order linear multi-agent systems to guarantee that all the subsystems are stable and the states of each follower can align with the states of leader. The authors in ref. [12] proposed a consensus control strategy for first-order linear multi-agent systems under time-varying topologies, and investigated the relationship between the consensus asymptotic stability and the spanning trees of the frequently changing topologies. Despite the aforementioned results for the first-order linear multi-agent systems, the authors in ref. [13] designed a distributed sliding mode control scheme for the second-order linear multi-agent systems with state constraints under directed graphs. The authors in ref. [14] studied a complicated situation, i.e., three kinds of transmission graphs (directed graph with fixed topology, directed graph with switching topology and undirected graph with fixed topology) were considered, and the inner relationship between the transmission graph and the system performance was given. Reference [15] designed a fixed-time consensus tracking control strategy for second-order linear multi-agent systems guided by a dynamic leader.
For the multi-agent systems with nonlinear characteristics, fruitful results have also been obtained [16,17,18,19,20,21]. Specifically, reference [20] studied the finite-time bipartite consensus problem for second-order nonlinear multi-agent systems with random switching topologies, which addressed the random topology by probabilistically modeling switching via edge existence probability matrices and Bernoulli variables. Considering unknown uncertainties and applying adaptive fuzzy control strategy, the authors in ref. [21] investigated the adaptive fuzzy output feedback consensus tracking control problem for nonlinear second-order multi-agent systems with unmeasurable states, in which fuzzy logic systems (FLSs) [22] were employed to approximate the nonlinear functions. A novel predefined-time sliding mode consensus control method for second-order nonlinear multi-agent systems with one leader and multiple followers was developed in [23], in which the consensus error is steered into an arbitrarily small neighborhood of zero within the predefined time.
Furthermore, reducing communication costs has long been a critical concern in multi-agent system control, as excessive data transmission not only wastes limited network bandwidth but also increases energy consumption. To address this issue, event-triggered control [24,25,26] has emerged as an effective approach, and instead of transmitting data at fixed time intervals, it triggers communication only when predefined conditions are met, thereby significantly reducing unnecessary data exchange. On another research front, the quantization problem has also received considerable attention during the past decades. At the early stage, the quantization phenomenon was regarded as a detrimental factor that deteriorated the systems’ performance due to its decreased variation frequency of input signals. However, by considering its advantage of reducing the communication cost, great efforts have been devoted to investigate the quantization problem and fruitful results have been obtained via the trade-off between system performance and communication cost [27,28,29]. The authors in ref. [28] investigated the fully distributed control problem for a class of linear multiagent systems with a logarithmic quantizer (Log-quantizer), and combined an event-triggered strategy to save network resources. It is worth mentioning that a major disadvantage caused by Log-quantizer is the chattering phenomenon due to its lower quantization levels. Therefore, the authors in ref. [29] studied the hysteresis quantized control problem for nonlinear continuous-time systems with constant time delay. The hysteresis quantizer with additional quantization levels was used to reduce the chattering phenomenon and the system’s stability was guaranteed for any quantization density.
However, the majority of the aforementioned methods are designed for low-order multi-agent systems. These approaches face limitations when dealing with many advanced engineering systems, such as flexible manipulators, unmanned aerial vehicle formations and multi-stage process control systems, which are characterized by complex, high-order dynamics. These high-order systems have complex nonlinearities and internal dynamics, which makes it difficult to directly apply low-order control strategies to them. Furthermore, many existing methods exhibit high communication costs, which become a critical problem in resource-constrained applications for multi-agent systems. Motivated by the aforementioned challenges, a novel adaptive fuzzy leader-following consensus control strategy with hysteresis quantizer for high-order nonlinear multi-agent systems was proposed. The main contributions of this work are summarized as follows:
- Comparing to existing methods primarily designed for low-order systems [30], a new adaptive fuzzy consensus control architecture is proposed for high-order nonlinear multi-agent systems. This framework effectively addresses the challenges of complex nonlinear coupling and internal dynamic stability that arise from increased system order.
- A hysteresis quantizer is integrated into the control method to address communication constraints in practical applications. Compared with traditional logarithmic quantizers [28], this design introduces additional quantization levels that significantly suppress the chattering phenomenon caused by signal quantization while maintaining system performance.
- The proposed method eliminates the common assumption in existing studies that requires complete knowledge of the reference trajectory and its high-order derivatives [31]. The approach achieves consensus tracking even when only a subset of followers has direct access to the reference information.
This paper is composed of five parts. In Section 2, the problem description and the preliminaries such as graph theory, the quantized control method and adaptive fuzzy approximation technique are given in detail. The leader-following consensus quantized controller design and the stability analysis are given in Section 3. Then, two simulation examples are given in Section 4 to demonstrate the effectiveness of the proposed control method. Finally, Section 5 concludes this paper.
2. Problem Formulation and Preliminaries
2.1. System Description
In this paper, the nonlinear high-order multi-agent system with quantized inputs is considered, and the i-th subsystem is described as
where denote the system state vectors. Specifically, represents the agent index, denotes the state index, and stands for the order of the system. For the i-th subsystem, is the output, and is the quantized input. Specifically, is the control input of the i-th agent at time t. In addition, are unknown continuous nonlinear functions, are additive unknown external disturbances, and are positive odd integers.
Remark 1.
The assumption for higher-order systems requires that be a positive odd number, which limits the universality of the method. Nevertheless, this constraint aligns well with many practical systems. Notably, the dynamics of high-order nonlinear systems like hydraulic dynamics [32], dynamical boiler–turbine units [33], and aircraft wing dynamics [34] exhibit or can be transformed into the structure of system (1) with positive odd integer , ensuring the broad practical applicability of the proposed framework.
2.2. Graph Theory
The information transmission mechanism among different subsystems is described by an undirected graph , where represents the label of the corresponding subsystem. is the edge set of two subsystems, and is the corresponding adjacency matrix. Due to the characteristics of undirected graph , we have that if exists, which means subsystem i and subsystem j are neighbors and can obtain states and system structure information from each other. If , equation holds, while if , equation holds. Then, it is easy to obtain that the edge between subsystem i and itself and = 0. It is obvious that the corresponding adjacency matrix is symmetric with diagonal elements being 0. The set of neighbors for subsystem i is defined as = {}, and . The diagonal matrix D is defined as , in which means the sum of i-th row of matrix A. Define the Laplacian matrix of the undirected graph as . Define the diagonal matrix as , in which indicates the connection between subsystem i and the common reference trajectory. And = 1 means that the reference trajectory can be utilized during the controller design for subsystem i, otherwise = 0.
Before proceeding further, the following assumptions are first introduced.
Assumption 1
([29]). The graph is connected, which indicates that there exists at least one path between each pair of subsystems.
Assumption 2
([29]). For subsystem i, when = 1, the reference signal and its n-th order derivative are totally known. When = 0, the only information about reference trajectory is that with being an unknown positive constant.
Assumption 3
([29]). The additive disturbance is bounded and satisfies the following inequality , in which is an unknown positive constant.
2.3. The Quantizer
The quantizer is described as the following
where (), with and . Then, we have .
Lemma 1
([35]). The quantizer can be expressed in a general way as
which satisfies
Lemma 2
([36]). For any , there exists a positive constant such that the following inequality holds
Lemma 3
([37]). For any , the following inequality holds
where is a positive function.
Lemma 4
([38]). For any constants , the following inequality holds
2.4. Fuzzy Logic Systems
The unknown nonlinear functions are usually precisely approximated by using FLSs, which are composed of a singleton fuzzifier, product-inference rule, and center-average defuzzifier. The corresponding IF–THEN rules are described as:
where denotes the input vector of the FLS and is the output. and are the fuzzy sets of and with membership functions and , respectively. M represents the number of IF-THEN rules. Then, the FLS can be expressed as
where = is the adjustable parameter vector and = is the fuzzy basis function vector, in which its component is defined as
Lemma 5
([39]). For arbitrarily unknown function and any constant , there exists a FLS (9) that satisfies , where is a compact set.
According to Lemma 5, the unknown nonlinear function is approximated by
Define the optimal vector as
where is the compact set for . Then, we have
where is the approximation error that satisfies .
Remark 2.
The design of FLSs involves important parameters including the number of fuzzy rules and the type of membership functions, which are closely related to practical applications. An excessive number of fuzzy rules may cause redundancy and increase computational burden, while an insufficient number may fail to capture the complex characteristics of the problem. Meanwhile, the selection of membership functions needs to be adapted to the specific characteristics of the application scenario, as it directly affects the precision of fuzzy reasoning and the adaptability of the system to practical problems. In subsequent research, further optimization of these parameters based on practical application requirements will be carried out to enhance the practicality and reliability of the fuzzy system.
The objective of this paper is to design an adaptive fuzzy leader-following consensus quantized controller for the high-order nonlinear multi-agent system such that the output of each subsystem can track a common reference trajectory and all the signals of the nonlinear system are bounded. In addition, the communication cost is reduced and the chattering effect is compensated via the proposed quantized control method. To facilitate the understanding of subsequent control design and stability analysis, all essential mathematical symbols, variables, and their corresponding definitions utilized throughout this paper are systematically organized in Appendix B.
3. Consensus Quantized Control Design
The leader-following consensus controller designed in this paper is based on the backstepping method. However, different from the traditional backstepping control design, the connection between two different subsystems also need to be taken into consideration.
Define the error variables as
Step 1. By defining , we have
where denotes the output tracking error vector of the multi-agent nonlinear system.
According to Lemma 5, the unknown nonlinear function is rewritten as
According to the definition of error variables , we have
Design the positive definite Lyapunov function as
To clarify, let and , where and denote the estimations of and , respectively. Specifically, is utilized to estimate the upper bound of the additive disturbance , while serves to estimate the upper bound of the unknown components in the higher-order derivatives of the reference trajectory when direct access to reference information is unavailable. Here, and are positive definite matrices.
Then, we design the equivalent virtual controller as
where is a positive constant to be designed. For the virtual controller , the term is the error suppression term, which accelerates the convergence of the tracking error ; is the fuzzy approximation compensation term to counteract the estimated term derived from approximating the unknown nonlinear function via a fuzzy logic system; compensates for the disturbance term related to in the error dynamics; is the disturbance suppression term, countering the external disturbance through the adaptive estimation of ; and is designed to comply with Lemma 2 to facilitate subsequent derivative calculations of the Lyapunov function and stability analysis.
By applying Assumptions 2 and 3 and Lemmas 2–4 to (24), we have
Then, we design as
According to (14) and (23), we have that is the function of variables , , and . By considering the effect of its neighbors, when , , can be viewed as a function of , and .
Step 2. Similar to step 1 and the aforementioned analysis, the derivative of is
The unknown nonlinear functions in (28) can be rewritten as
where represent the effects of subsystem i’s neighbors to states .
According to Lemma 4, the Lyapunov function is designed as
where , , and . , and are the estimations of , , and , respectively. , , and are positive definite matrices. It should be noted that the addictive estimation of avoids some information exchange, which simplifies the control design process and reduces the communication cost.
Then, the derivative of is
Design the equivalent virtual controller as
where is a positive constant to be designed, , , , and . For the virtual controller , the term accelerates the convergence of ; the term addresses the coupling effect between the error and ; the term compensates for the unknown nonlinear function corresponding to the second state of the i-th agent; the following seven terms are components of the time derivative of with respect to time t, which are introduced to compensate for the coupling effects arising from the virtual control variables; is the disturbance suppression term same as step 1; the final term is constructed to comply with the constraints of Lemma 2 to facilitate subsequent stability analysis of the Lyapunov function.
Similar to (25) of step 1, the following inequality holds
By designing , (35) can be rewritten as
Step q(). Based on the aforementioned analysis, can be viewed as the function of , , , , , , and .
According to (15), the derivative of is
Based on Lemma 5, the unknown nonlinear functions are rewritten as
where represent the effects of subsystem i’s neighbors to states .
Design the Lyapunov function as
where , and . , and are the estimations of , and , respectively. , and are positive definite matrices.
The derivative of is
Design the equivalent virtual controller as
where is a positive constant to be designed, , , , , , , , and . The explanation of each term is the same as in Step 2.
Similar to step 2, we design
Step . According to (15), the derivative of is
Design the positive definite Lyapunov function as
where , and . , and are the estimations of , and , respectively. , and are positive definite matrices.
The derivative of is
Similar to step q, define as
where and are positive constants to be designed. The relevant parameters are defined as follows
Then, the actual controller is designed as
where is a positive constant to be designed.
According to Lemma 1, the following inequality holds
where is a positive constant to be designed.
Design the adaptive laws as
To facilitate a clearer understanding of the proposed methodology, the overall design procedure is systematically presented in Algorithm 1.
| Algorithm 1 Adaptive Fuzzy Leader-Following Consensus Quantized Control |
|
Then, the main results of this paper can be summarized as the following theorem. The proof of Theorem 1 is provided in Appendix A.
Theorem 1.
With controller (50) and adaptive laws (53) and (54), the semi-globally uniformly ultimately boundedness property of the high-order nonlinear multi-agent system (1) is achieved and all the signals of the closed-loop system are bounded. Furthermore, the consensus tracking performance is guaranteed, which means that the output of each subsystem can track a common reference trajectory .
4. Simulation Studies
In this section, the following two simulation examples of nonlinear multi-agent systems with three subsystems are given to demonstrate the effectiveness of the proposed control method. All simulations are implemented in MATLAB 2020b, and the ode45 numerical solver is adopted to solve the high-order nonlinear system model.
4.1. Example 1
In this example, the simulation is specifically designed to reflect a practical scenario where only subsystem 1 has direct access to the reference signal , thereby testing the cooperative output tracking capability of the control method under limited information sharing. The dynamics of each follower are described by second-order nonlinear functions, formulated as follows:
The information transmission graph of the nonlinear multi-agent system is shown in Figure 1.
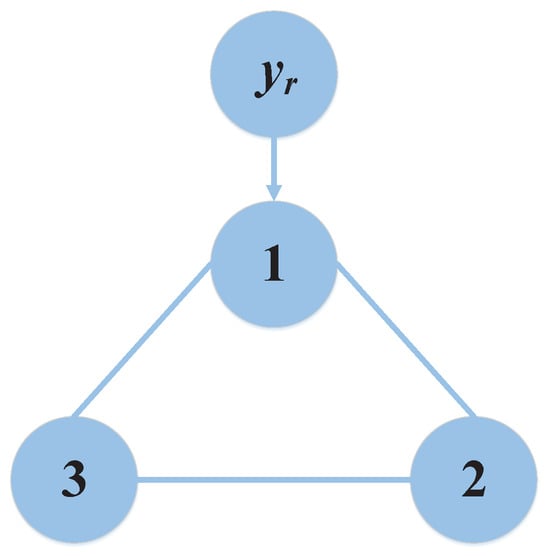
Figure 1.
The information transmission graph.
According to Figure 1, the corresponding adjacency matrix is defined as . Only the first agent has access to the reference trajectory information so the pinning gain matrix is given by . Based on the theoretical framework established in Section 3, the fuzzy logic systems are constructed to approximate the unknown nonlinear dynamics. The Gaussian membership functions are meticulously selected for each state variable, with w taking values from the set of natural numbers 1 to 5, corresponding to five fuzzy sets for each state. The fuzzy membership functions are shown as follows:
where denotes the index of the three agents. Then, the fuzzy basis functions are designed as
The adaptive laws designed for modify the fuzzy logic system parameters, enabling precise approximation of the unknown nonlinear functions. The specific formulation for each agent is given as follows:
where .
All system and control parameters are initialized in strict accordance with the theoretical design in Section 3. The initial values are given as
The reference trajectory is given as , and the external disturbances are . The design parameters are chosen as , , , , , , , , , , .
The controller design methodology is summarized as follows: the virtual controller is computed using Equations (23); the actual control input is calculated via Equation (50); the adaptive laws for and are computed using Equations (26) and (42). Then, each continuous control input is quantized into based on . The simulation results are shown in Figure 2, Figure 3, Figure 4, Figure 5, Figure 6, Figure 7, Figure 8 and Figure 9.
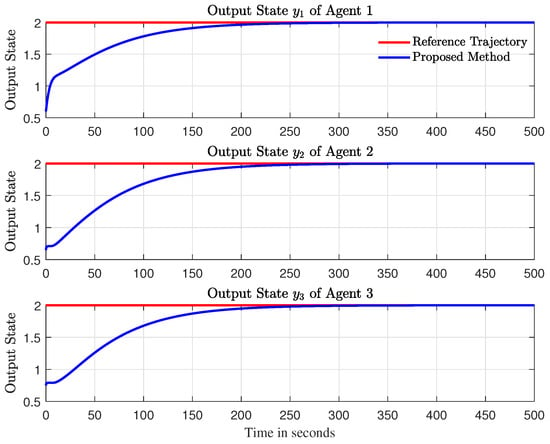
Figure 2.
The trajectories of outputs and the reference trajectory .
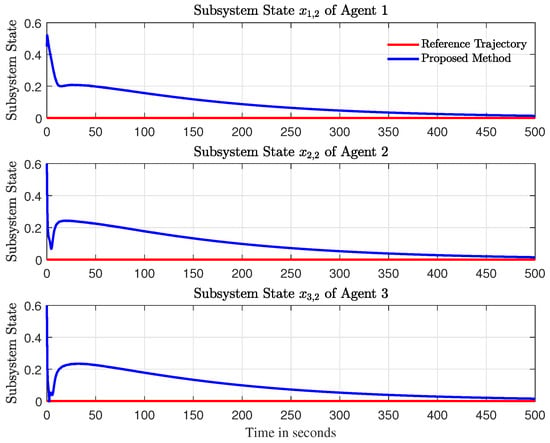
Figure 3.
The trajectories of subsystem states .
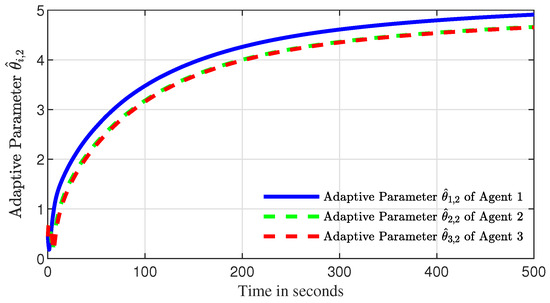
Figure 4.
The trajectories of the adaptive parameters .
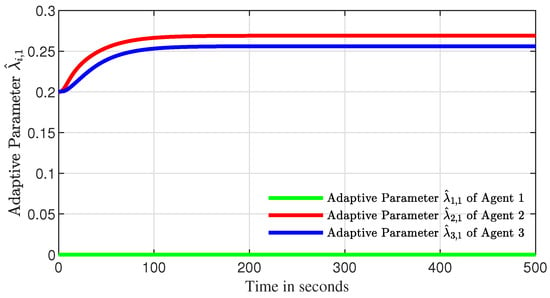
Figure 5.
The trajectories of parameters .
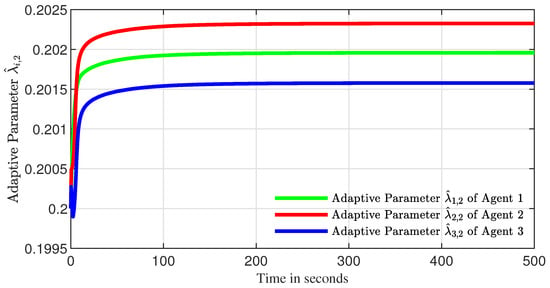
Figure 6.
The trajectories of parameters .
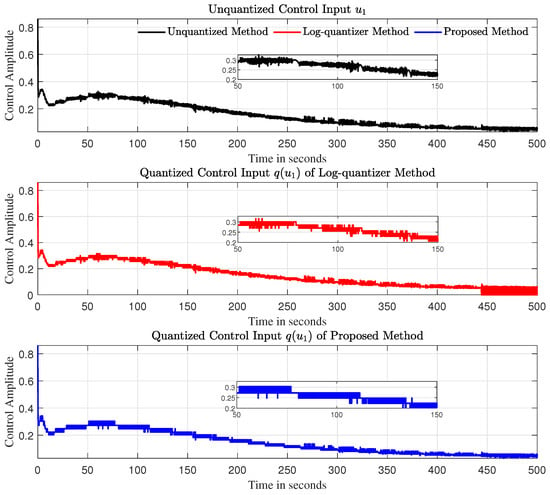
Figure 7.
The trajectories of control input and its quantized input under Log-quantizer method and proposed method.
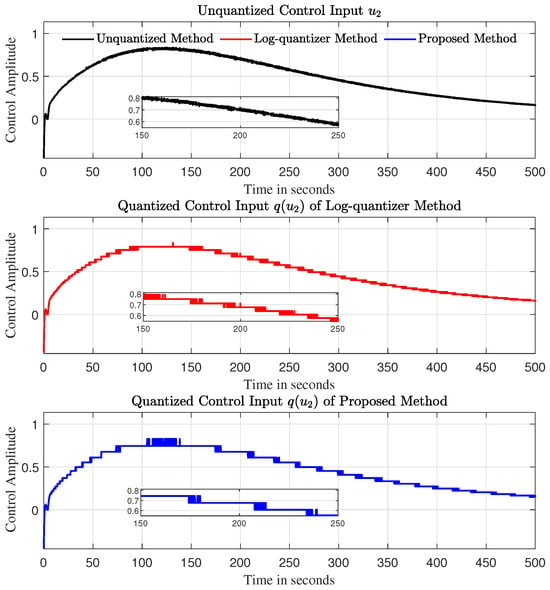
Figure 8.
The trajectories of control input and its quantized input under Log-quantizer method and proposed method.
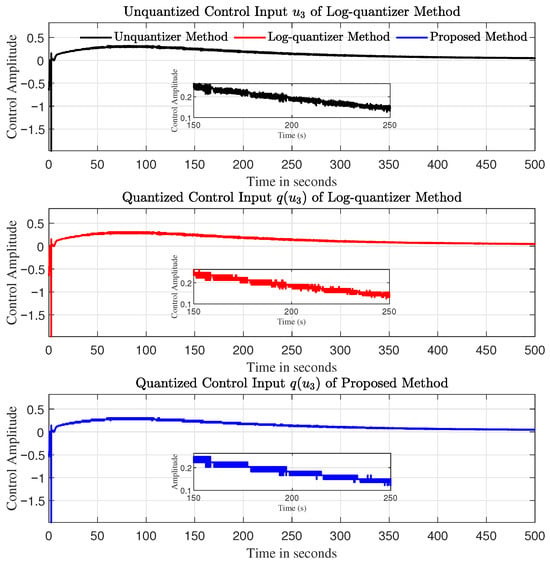
Figure 9.
The trajectories of control input and its quantized input under Log-quantizer method and proposed method.
The simulation aims to validate the proposed control strategy in a step-by-step manner. First, the overall system performance is demonstrated through output tracking results. Then, the internal state behaviors and adaptive parameter evolution are examined to verify the stability and learning capability. Figure 2 demonstrates excellent consensus tracking performance, where all follower outputs successfully converge to and maintain accurate tracking of the common reference trajectory , despite heterogeneous initial conditions and limited reference signal accessibility. The bounded and stable evolution of the subsystem states in Figure 3, coupled with the convergent adaptation of fuzzy parameters in Figure 4 and stability-boundary estimation parameters and in Figure 5 and Figure 6, provides robust evidence for the closed-loop system’s internal stability and the adaptive mechanism’s capability to approximate unknown nonlinearities effectively.
Finally, a comparative analysis of the control inputs is conducted to illustrate the practical effectiveness of the proposed method and its advantage in chattering suppression. Specifically, the superior performance of the proposed method is evaluated by comparing it with two strategies: the unquantized controller (i.e., the original control input ) and a basic Log-quantizer. For fair comparison, the quantization thresholds of the Log-quantizer are set consistent with those of the proposed method in this simulation. All other parameters, including system initial conditions, controller gains, adaptive law parameters, and the design of virtual controllers, are kept uniform across the three control strategies, ensuring that any observed performance differences can be attributed solely to the quantization schemes. The practical efficacy of the control scheme is confirmed in Figure 7, Figure 8 and Figure 9, which depict the control inputs and their quantized counterparts under the method with Log-quantizer and the method proposed in this paper.
Figure 7, Figure 8 and Figure 9 present the performance differences between the proposed method and the Log-quantizer method by comparing their control input and quantized input trajectories. However, the quantized input trajectory of the Log-quantizer method in Figure 7 has significant and frequent jumping phenomena, which is exactly the inherent chattering problem of the Log-quantizer, leading to frequent switching of control inputs. Furthermore, a comparison between the Log-quantizer and the unquantized control method, as summarized in Table 1, further validates the superiority of the proposed method. Table 1 contrasts the jump counts, where a jump is considered to occur whenever the absolute difference between consecutive control signal values exceeds a threshold of , and each such significant variation is counted as one communication event. The quantitative metrics effectively captures the communication burden by identifying each substantial control signal change as one transmission instance.

Table 1.
Comprehensive quantitative comparison of quantization performance and communication burden.
In Table 1, regarding communication efficiency, the proposed method reduces the jump count of control inputs compared to the other two methods. This reduction in jump count effectively alleviates the communication burden. Overall, as illustrated in Figure 2, Figure 3, Figure 4, Figure 5, Figure 6, Figure 7, Figure 8 and Figure 9, the proposed method achieves a balanced optimization of quantization tracking performance and communication efficiency, thus demonstrating its effectiveness and superiority in practical applications.
4.2. Example 2
To rigorously validate the effectiveness of the proposed control strategy for high-order systems, a third-order nonlinear multi-agent system is considered in this section. The dynamics of the i-th agent are given as
The information transmission graph for this system remains unchanged from Figure 1. Furthermore, the communication constraint is the same as the example Section 4.1, as only subsystem 1 has direct access to the reference signal . The communication topology yields , and the pinning gain matrix . The fuzzy membership functions are shown as follows:
where is the index of each agent, and w is a natural number that takes values between 1 and 5. Then, the fuzzy basis functions are designed as
The adaptive law for of each agent is given as follows:
where . The initial values of the system are given as
The reference trajectory is set to , while the external disturbances are . The design parameters are selected as follows: , , , , , , , , , , , .
The virtual controllers and are computed via Equations (23) and (33), respectively, while the actual control input is derived using Equation (50). The adaptive law for , is calculated based on Equations (26) and (42). In this example, we also compare the proposed method with a unquantized controller and a Log-quantizer. The quantization thresholds of the Log-quantizer are configured to be identical to those of the proposed method. All other parameters are kept uniform across these three strategies. The simulation results are shown in Figure 10, Figure 11, Figure 12, Figure 13, Figure 14, Figure 15, Figure 16, Figure 17, Figure 18 and Figure 19.
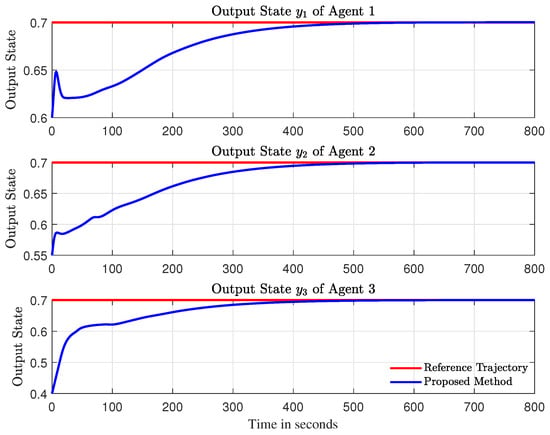
Figure 10.
The trajectories of outputs and the reference trajectory .
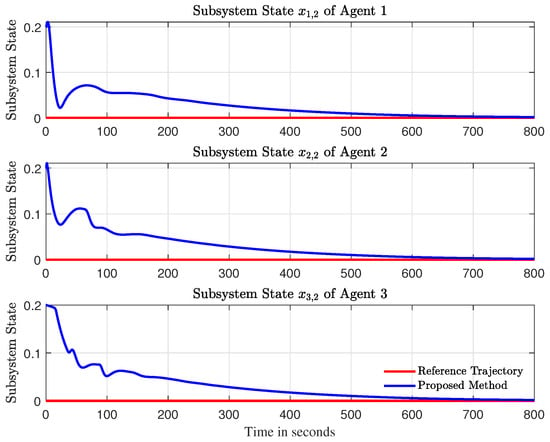
Figure 11.
The trajectories of subsystem states .
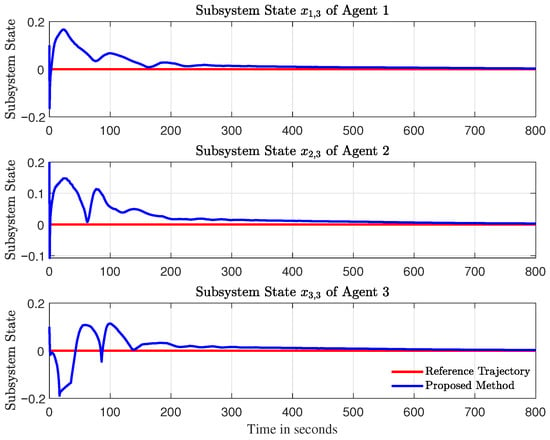
Figure 12.
The trajectories of subsystem states .
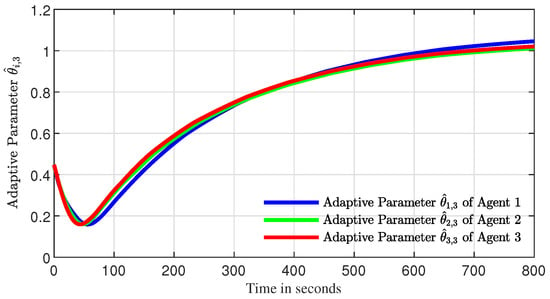
Figure 13.
The trajectories of the adaptive parameters .
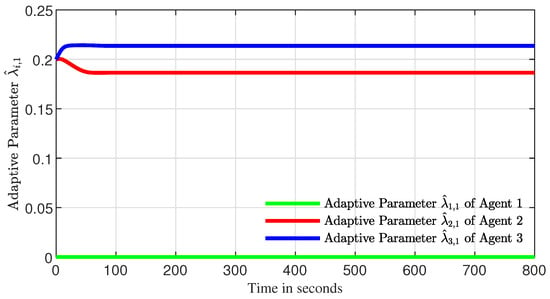
Figure 14.
The trajectories of parameters .
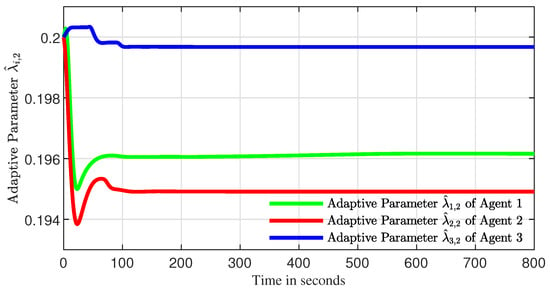
Figure 15.
The trajectories of parameters .
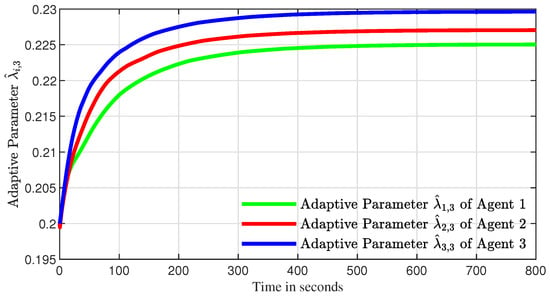
Figure 16.
The trajectories of parameters .
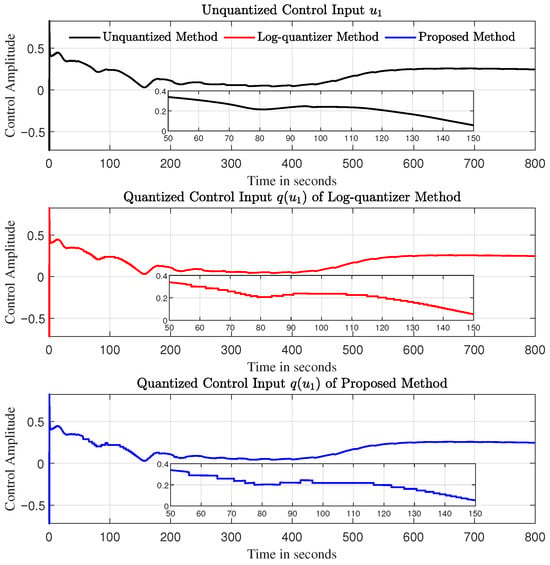
Figure 17.
The trajectories of control input and its quantized input under Log-quantizer method and proposed method.
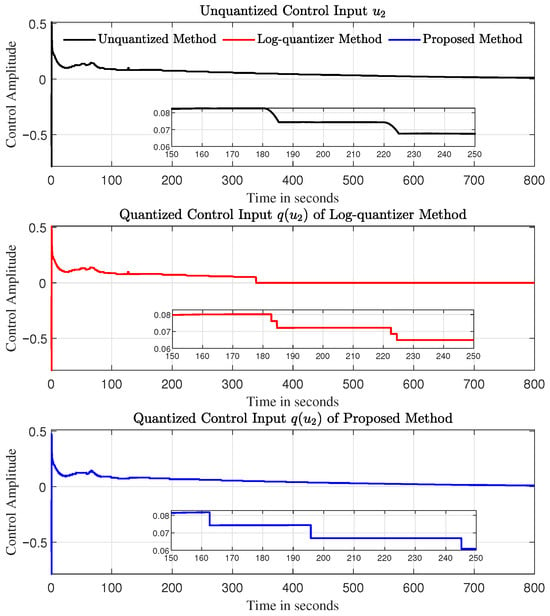
Figure 18.
The trajectories of control input and its quantized input under Log-quantizer method and proposed method.
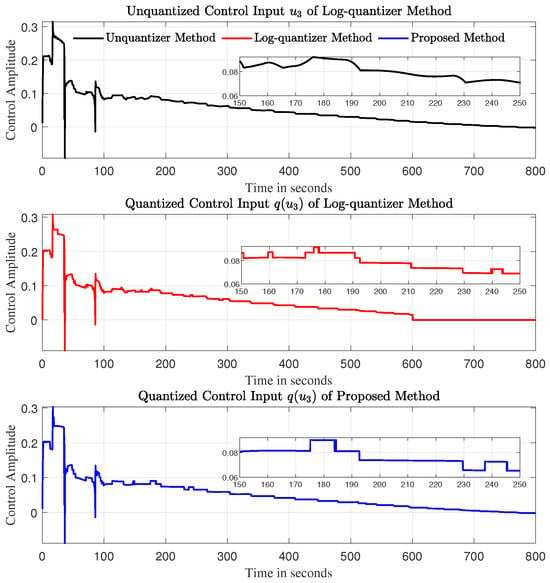
Figure 19.
The trajectories of control input and its quantized input under Log-quantizer method and proposed method.
Figure 10 shows that all outputs can successfully track the reference trajectory . Furthermore, the bounded states and convergent adaptive parameters in Figure 11, Figure 12, Figure 13, Figure 14, Figure 15 and Figure 16 demonstrate the system’s stability. The generated control inputs and their quantized counterparts are shown in Figure 17, Figure 18 and Figure 19.
Figure 17, Figure 18 and Figure 19 present the performance differences between the proposed method and the Log-quantizer method by comparing their control input and quantized input trajectories. These figures show that the control inputs and their quantized inputs of the proposed method under different quantizers exhibit an overall stable and smooth characteristic without obvious fluctuations. Furthermore, Table 2 presents a comparative analysis that quantifies the performance of the proposed method against a Log-quantizer and an unquantized control strategy.
Table 2.
Comprehensive quantitative comparison of quantization performance and communication burden.
As presented in Table 2, the proposed method achieves comprehensively superior performance across the multi-agent system. The proposed method significantly outperforms the Log-quantizer for all agents. It maintains consistently lower communication burden across all agents compared to the other methods. This demonstrates an effective balance between quantization accuracy and communication efficiency, validating its overall effectiveness and practical superiority.
5. Conclusions
In this paper, an adaptive fuzzy leader-following consensus control method was proposed for high-order nonlinear multi-agent system. The controller was designed only with the information from the subsystem itself and its neighbors. The simulation results show that the proposed control strategy can still guarantee the system performance even if the reference trajectory is not exactly known to all the subsystems. In addition, the chattering effect is also compensated for. Future research can expand this method to networked control systems, incorporating considerations of common network phenomena such as communication delays and packet loss. Additionally, it can be combined with event-triggered control mechanisms to reduce redundant data transmission, thereby improving the energy efficiency of resource-constrained multi-agent systems. These extension directions will enhance the practical application value of the method and broaden its scope of application in engineering practices.
Author Contributions
Conceptualization, Y.L., M.M. and T.W.; methodology, Y.L. and M.M.; software, Y.L. and M.M.; validation, M.M. and T.W.; formal analysis, M.M.; investigation, T.W.; resources, M.M. and T.W.; data curation, Y.L. and M.M.; writing—original draft preparation, Y.L. and M.M.; writing—review and editing, M.M. and T.W.; visualization, Y.L.; supervision, M.M. and T.W.; project administration, M.M. and T.W.; funding acquisition, M.M. All authors have read and agreed to the published version of the manuscript.
Funding
This research was supported by the National Natural Science Foundation of China under Grant 62403342, the Natural Science Foundation of Jiangsu Province under Grant BK20240769, and the Natural Science Foundation of the Jiangsu Higher Education Institutions of China under Grant 24KJB510044.
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
The original contributions presented in this study are included in the article. Further inquiries can be directed to the corresponding author.
Conflicts of Interest
The authors declare no conflicts of interest.
Appendix A
Proof.
Define ; then (55) can be rewritten as
Integrating (A1) over , we have
where and .
Based on the aforementioned analysis, the stability of the nonlinear multi-agent system is guaranteed. According to (39), we can obtain that the variables are all bounded with , . Then, from the definition of , we have that is also bounded. From (23), the virtual controller is bounded, which means are bounded. According to (48) and (50), the boundness of and are guaranteed. From the definition of , we can obtain that is also bounded. By taking Barbalat’s Lemma into consideration, it is obvious that . Then, . Thus, all the signals of the closed-loop nonlinear system are bounded, and the consensus tracking performance is guaranteed. □
Appendix B
This appendix contains a systematically organized nomenclature table that catalogues all essential mathematical symbols, variables, and notations utilized in the main text.
Table A1.
Comprehensive nomenclature of mathematical symbols and variables (part 1).
Table A1.
Comprehensive nomenclature of mathematical symbols and variables (part 1).
| Symbol | Description |
|---|---|
| N | Number of agents |
| Order of the system | |
| Index of agents | |
| Index of state variables | |
| t | Continuous time variable |
| k-th state variable of the i-th agent | |
| State vector | |
| System output | |
| Reference trajectory | |
| Unknown continuous nonlinear functions | |
| Unknown external disturbances | |
| Positive odd integers | |
| Control input of the i-th agent | |
| Quantized control input vector | |
| Undirected graph | |
| v | Set of vertices |
| Set of edges | |
| Adjacency matrix | |
| Set of neighbors for agent i | |
| Connection weight | |
| D | Degree matrix |
| L | Graph Laplacian matrix |
| Diagonal matrix | |
| Reference trajectory access indicator | |
| Error variable | |
| Error vector | |
| Virtual controller | |
| Equivalent virtual controller | |
| Positive constant design parameters | |
| Input vector of FLS | |
| Fuzzy sets | |
| Membership functions | |
| M | Number of IF–THEN rules |
| Adjustable parameter vector | |
| Fuzzy basis function vector | |
| Optimal parameter vector | |
| Approximation error | |
| Lyapunov function at step q | |
| Parameter estimation error | |
| Boundary estimation error | |
| Positive definite matrices | |
| Quantization parameter | |
| Quantization density parameter |
References
- Zhu, J.; Lu, C.; Li, J.; Wang, F.-Y. Secure Consensus Control on Multi-Agent Systems Based on Improved PBFT and Raft Blockchain Consensus Algorithms. IEEE/CAA J. Autom. Sin. 2025, 12, 1407–1417. [Google Scholar] [CrossRef]
- Zhang, H.; Wang, A.; Ji, W.; Qiu, J.; Yan, H. Optimal Consensus Control for Continuous-Time Linear Multiagent Systems: A Dynamic Event-Triggered Approach. IEEE Trans. Neural Netw. Learn. Syst. 2024, 35, 14449–14457. [Google Scholar] [CrossRef]
- Beklaryan, A.L.; Akopov, A.S. Simulation of Agent-rescuer Behaviour in Emergency Based on Modified Fuzzy Clustering: (Extended Abstract). In Proceedings of the 2016 International Conference on Autonomous Agents & Multiagent Systems (AAMAS ’16), Richland, SC, USA, 9–10 May 2016; pp. 1275–1276. [Google Scholar]
- Akopov, A.S.; Beklaryan, L.A.; Thakur, M. Improvement of Maneuverability Within a Multiagent Fuzzy Transportation System with the Use of Parallel Biobjective Real-Coded Genetic Algorithm. IEEE Trans. Intell. Transp. Syst. 2022, 23, 12648–12664. [Google Scholar] [CrossRef]
- Guo, J.; Luo, Y.; Li, K. Adaptive fuzzy sliding mode control for coordinated longitudinal and lateral motions of multiple autonomous vehicles in a platoon. Sci. China Technol. Sci. 2017, 60, 576–586. [Google Scholar] [CrossRef]
- Wang, Z.; Gu, Y.; Liu, J.; Zhang, Y.; Feng, K.; Dai, J.; Zheng, G. Event-Triggered Fixed-Time Consensus Tracking Control for Uncertain Nonlinear Multi-Agent Systems with Dead-Zone Input. Actuators 2025, 14, 414. [Google Scholar] [CrossRef]
- Zhang, X.; Li, Y.; Xiong, S.; Liu, X.; Guo, R. A Robust Cooperative Control Protocol Based on Global Sliding Mode Manifold for Heterogeneous Nonlinear Multi-Agent Systems Under the Switching Topology. Actuators 2025, 14, 57. [Google Scholar] [CrossRef]
- Luo, S.; Xu, J.; Liang, X. Mean-Square Consensus of Heterogeneous Multi-Agent Systems with Time-Varying Communication Delays and Intermittent Observations. IEEE Trans. Circuits Syst. II Express Briefs 2022, 69, 184–188. [Google Scholar] [CrossRef]
- Hui, M.; Liu, X.; Cao, J. Improved Fixed-Time Event-Triggered Average Consensus of Multi-Agent Systems Under DoS Attacks. IEEE Trans. Circuits Syst. II Express Briefs 2024, 71, 3815–3819. [Google Scholar] [CrossRef]
- Li, H.; Chen, Z.; Wu, L.; Lam, H.-K. Event-Triggered Control for Nonlinear Systems under Unreliable Communication Links. IEEE Trans. Fuzzy Syst. 2017, 25, 813–824. [Google Scholar] [CrossRef]
- Li, Z.; Liu, X.; Ren, W.; Xie, L. Distributed Tracking Control for Linear Multiagent Systems with a Leader of Bounded Unknown Input. IEEE Trans. Autom. Control. 2013, 58, 518–523. [Google Scholar] [CrossRef]
- Zhang, W.; Tang, Y.; Han, Q.-L.; Liu, Y. Sampled-Data Consensus of Linear Time-Varying Multiagent Networks with Time-Varying Topologies. IEEE Trans. Cybern. 2022, 52, 128–137. [Google Scholar] [CrossRef]
- Yang, J.; Cao, G.; Sun, Z.; Zhang, W. A New Method to Design Distributed Consensus Controller for Linear Multi-Agent Systems with Directed Graphs. IEEE Trans. Circuits Syst. II Express Briefs 2022, 69, 1492–1496. [Google Scholar] [CrossRef]
- O.-Saber, R.; Murray, R.M. Consensus Problems in Networks of Agents with Switching Topology and Time-Delays. IEEE Trans. Autom. Control. 2004, 49, 1520–1533. [Google Scholar] [CrossRef]
- Liu, Y.; Zuo, Z.; Song, J.; Li, W. Fixed-Time Consensus Control of General Linear Multiagent Systems. IEEE Trans. Autom. Control. 2024, 69, 5516–5523. [Google Scholar] [CrossRef]
- Ahmed, I.; Rehan, M.; Iqbal, N. A Novel Exponential Approach for Dynamic Event-Triggered Leaderless Consensus of Nonlinear Multi-Agent Systems Over Directed Graphs. IEEE Trans. Circuits Syst. II Express Briefs 2022, 69, 1782–1786. [Google Scholar] [CrossRef]
- Zamani, N.; Kamali, M.; Askari-Marnani, J.; Kalantari, H.; Aghdam, A.G. Fault-Tolerant Leader-Follower Controller for Uncertain Nonlinear Multi-Agent Systems. IEEE Trans. Autom. Sci. Eng. 2025, 22, 9376–9387. [Google Scholar] [CrossRef]
- Lui, D.G.; Petrillo, A.; Santini, S. Bipartite Tracking Consensus for High-Order Heterogeneous Uncertain Nonlinear Multi-Agent Systems with Unknown Leader Dynamics via Adaptive Fully-Distributed PID Control. IEEE Trans. Netw. Sci. Eng. 2023, 10, 1131–1142. [Google Scholar] [CrossRef]
- Hao, C.; Liu, Z.; Zheng, L.; Chen, C.L.P.; Lai, G. Observer-Based Distributed Adaptive Neural Network Containment Control for Uncertain Nonlinear Multi-Agent Systems under DoS Attacks. Neurocomputing 2025, 659, 131306. [Google Scholar] [CrossRef]
- Lu, R.; Wu, J.; Zhan, X.; Yan, H. Finite-Time Bipartite Consensus for Second-Order Nonlinear Multi-Agent Systems Under Random Switching Topologies. IEEE Trans. Circuits Syst. II Express Briefs 2023, 70, 4474–4478. [Google Scholar] [CrossRef]
- Chen, C.L.P.; Ren, C.-E.; Du, T. Fuzzy observed-based adaptive consensus tracking control for second-order multi-agent systems with heterogeneous nonlinear dynamics. IEEE Trans. Fuzzy Syst. 2016, 24, 906–915. [Google Scholar] [CrossRef]
- Ma, M.; Wang, T.; Qiu, J.; Karimi, H. Adaptive Fuzzy Decentralized Tracking Control for Large-Scale Interconnected Nonlinear Networked Control Systems. IEEE Trans. Fuzzy Syst. 2021, 29, 3186–3191. [Google Scholar] [CrossRef]
- Jin, D.; Xiang, Z. Predefined-Time Consensus for Second-Order Nonlinear Multiagent Systems via Sliding Mode Technique. IEEE Trans. Fuzzy Syst. 2024, 32, 4534–4541. [Google Scholar] [CrossRef]
- Rsetam, K.; Cao, Z.; Man, Z.; Zhang, X.M. GPIO-Based Continuous Sliding Mode Control for Networked Control Systems Under Communication Delays with Experiments on Servo Motors. IEEE/CAA J. Autom. Sin. 2025, 12, 99–113. [Google Scholar] [CrossRef]
- Zhang, X.; Han, Q.; Ge, X. An Overview of Recent Advances in Event-Triggered Control. Sci. Sin. Inf. (Sci. China Inf. Sci.) 2025, 68, 161201. [Google Scholar] [CrossRef]
- Qiu, J.; Ma, M.; Wang, T. Event-Triggered Adaptive Fuzzy Fault-Tolerant Control for Stochastic Nonlinear Systems via Command Filtering. IEEE Trans. Syst. Man Cybern. Syst. 2022, 52, 1145–1155. [Google Scholar] [CrossRef]
- Wang, X.; Wen, G.; Zhao, D.; Huang, T. Robust Quantized Consensus of Multiagent Systems Under Disturbance and DoS Attacks. IEEE Trans. Control. Netw. Syst. 2025, 12, 1626–1637. [Google Scholar] [CrossRef]
- Wang, Q.; Li, S.; He, W.; Zhong, W. Fully Distributed Event-Triggered Bipartite Consensus of Linear Multi-Agent Systems with Quantized Communication. IEEE Trans. Circuits Syst. II Express Briefs 2022, 69, 3234–3238. [Google Scholar] [CrossRef]
- Wang, W.; Wen, C.; Huang, J. Distributed adaptive asymptotically consensus tracking control of nonlinear multi-agent systems with unknown parameters and uncertain disturbances. Automatica 2017, 27, 133–142. [Google Scholar] [CrossRef]
- Wang, H.; Liu, Q.; Park, J.H. Predefined-Time Fuzzy Adaptive Optimal Secure Consensus Control for Multiagent Systems with Unknown Follower Dynamics. IEEE Trans. Fuzzy Syst. 2025, 33, 2122–2135. [Google Scholar] [CrossRef]
- Cui, M.; Tong, S. Fuzzy Adaptive Exact-Optimal Consensus Output-Feedback Control for Uncertain Nonlinear High-Order Multiagent Systems. IEEE Trans. Fuzzy Syst. 2024, 32, 6399–6408. [Google Scholar] [CrossRef]
- Manring, N.; Fales, R. Hydraulic Control Systems; Wiley: Hoboken, NJ, USA, 2019. [Google Scholar]
- Lv, M.; Wang, N. Distributed Control for Uncertain Multiagent Systems with the Powers of Positive-Odd Numbers: A Low-Complexity Design Approach. IEEE Trans. Autom. Control. 2024, 69, 434–441. [Google Scholar] [CrossRef]
- Fung, Y. An Introduction to the Theory of Aeroelasticity; Wiley: Hoboken, NJ, USA, 1955. [Google Scholar]
- Zhou, J.; Wen, C.; Wang, W. Adaptive control of uncertain nonlinear systems with quantized input signal. Automatica 2018, 95, 152–162. [Google Scholar] [CrossRef]
- Yang, Y.; Zhou, C. Adaptive fuzzy H∞ stabilization for strict-feedback canonical nonlinear systems via backstepping and small-gain approach. IEEE Trans. Fuzzy Syst. 2005, 13, 104–114. [Google Scholar] [CrossRef]
- Zuo, Z.; Wang, C. Adaptive trajectory tracking control of output constrained multi-rotors systems. IET Control. Theory Appl. 2014, 8, 1163–1174. [Google Scholar] [CrossRef]
- Qian, C.; Lin, W. Non-Lipschitz continuous stabilizers for nonlinear systems with uncontrollable unstable linearization. Syst. Control. Lett. 2001, 42, 185–200. [Google Scholar] [CrossRef]
- Tong, S.; Li, Y. Observer-based fuzzy adaptive control for strict-feedback nonlinear systems. Fuzzy Sets Syst. 2009, 160, 1749–1764. [Google Scholar] [CrossRef]
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).