Dielectric Elastomer-Driven Bionic Inchworm Soft Robot Realizes Forward and Backward Movement and Jump



Abstract
:1. Introduction
2. Materials and Methods
2.1. Design
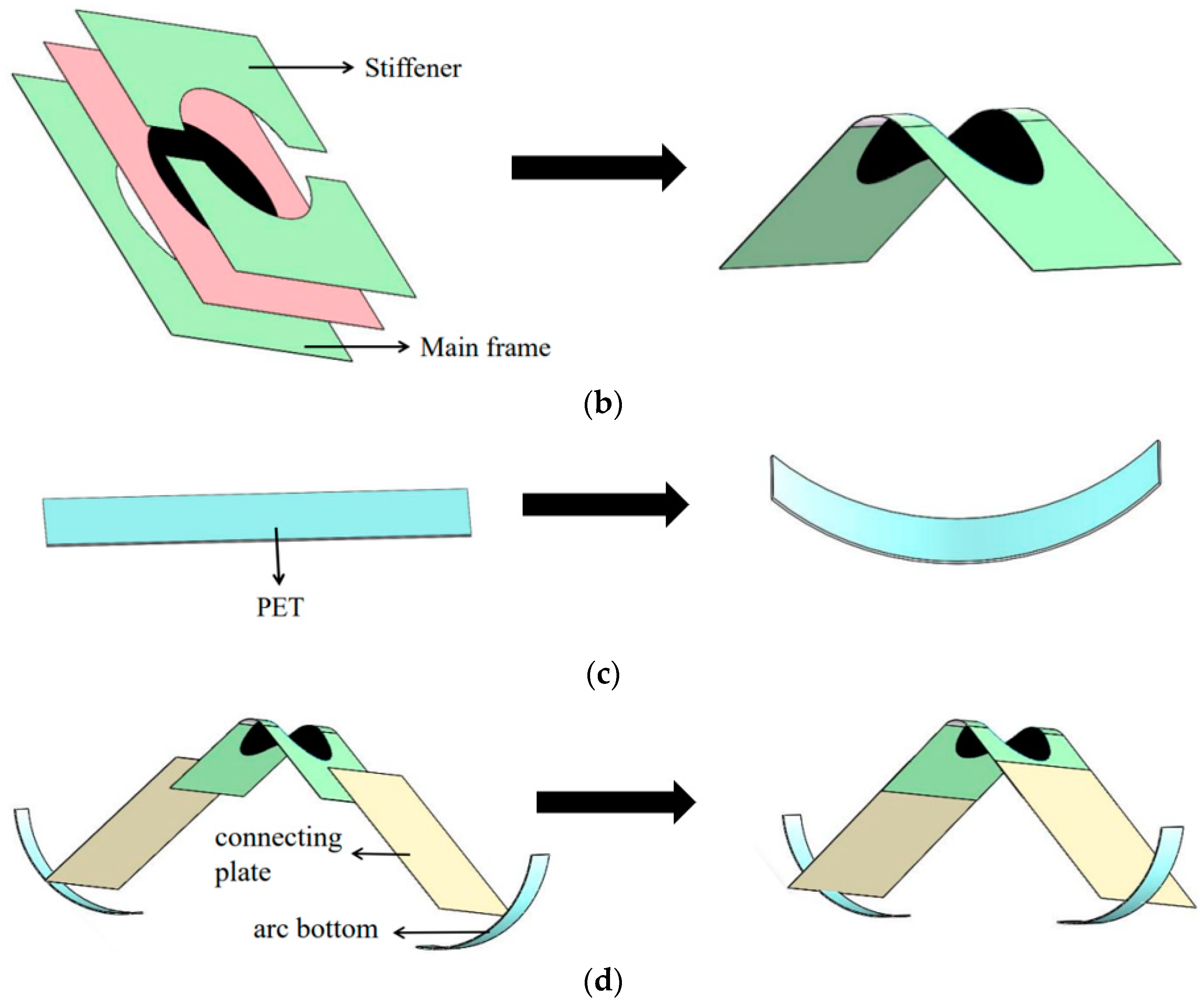
2.2. Fabrication
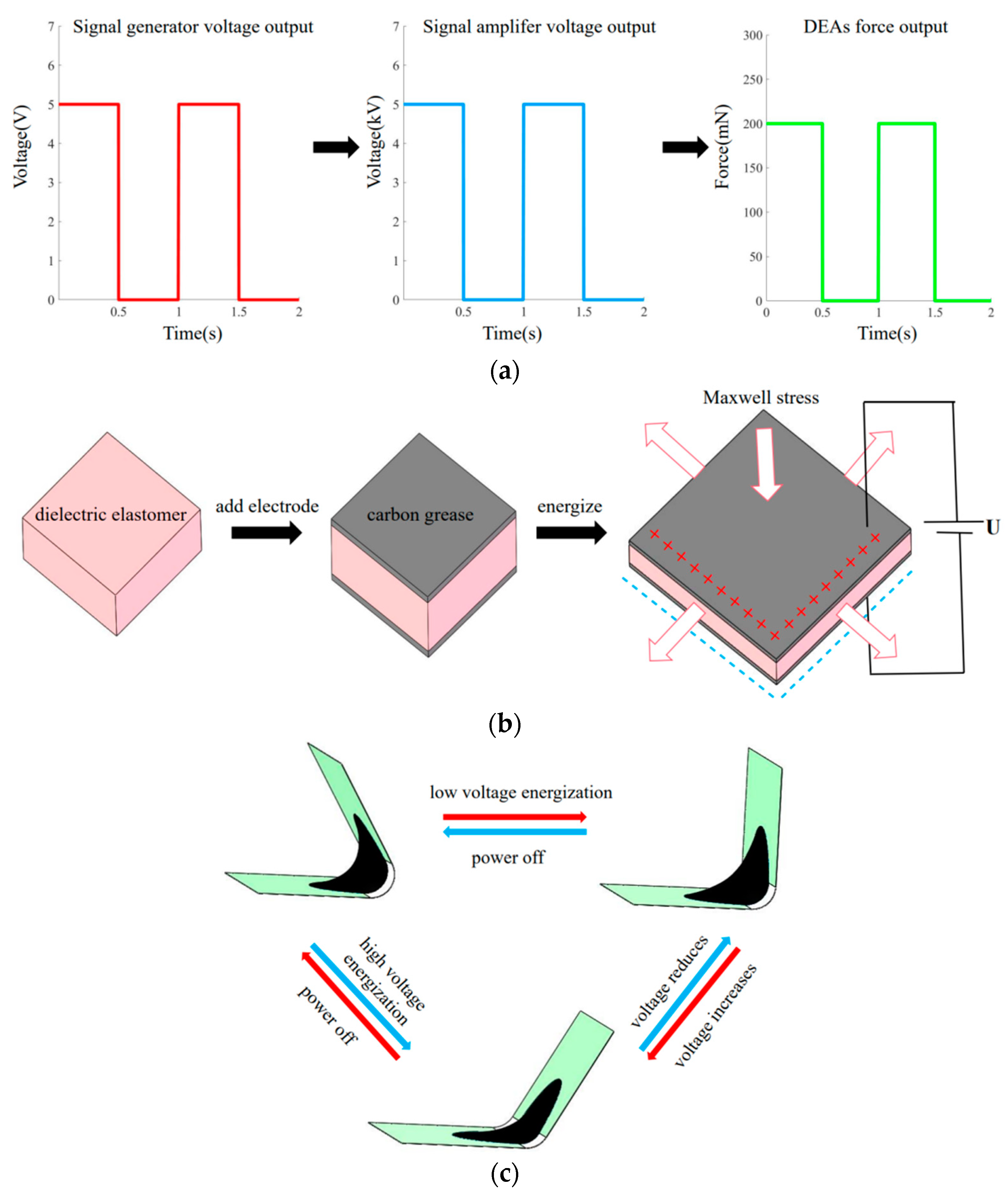
3. Multimodal Motion and Its Principle
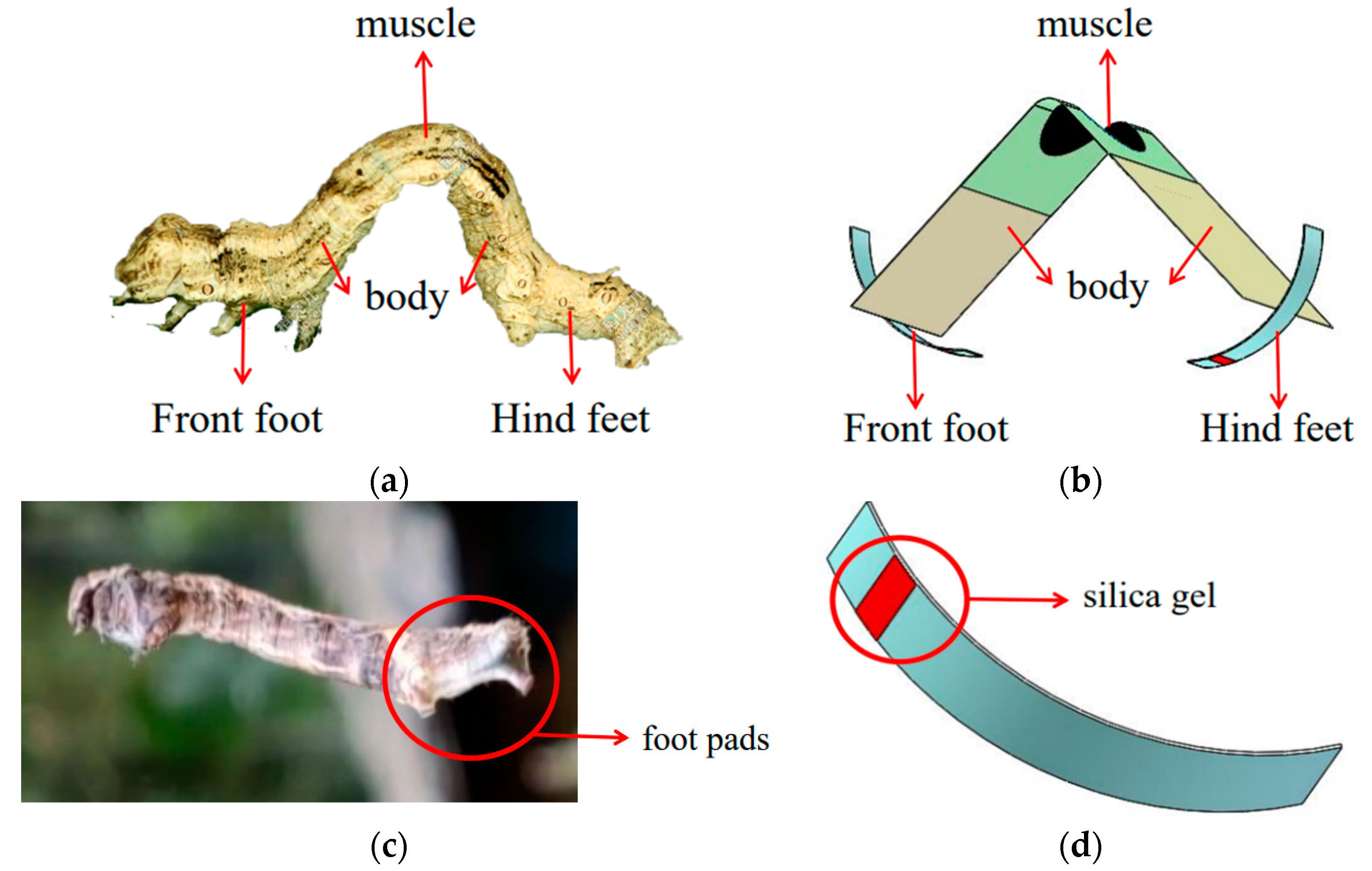
3.1. Robotic Body
3.2. Robotic Feet
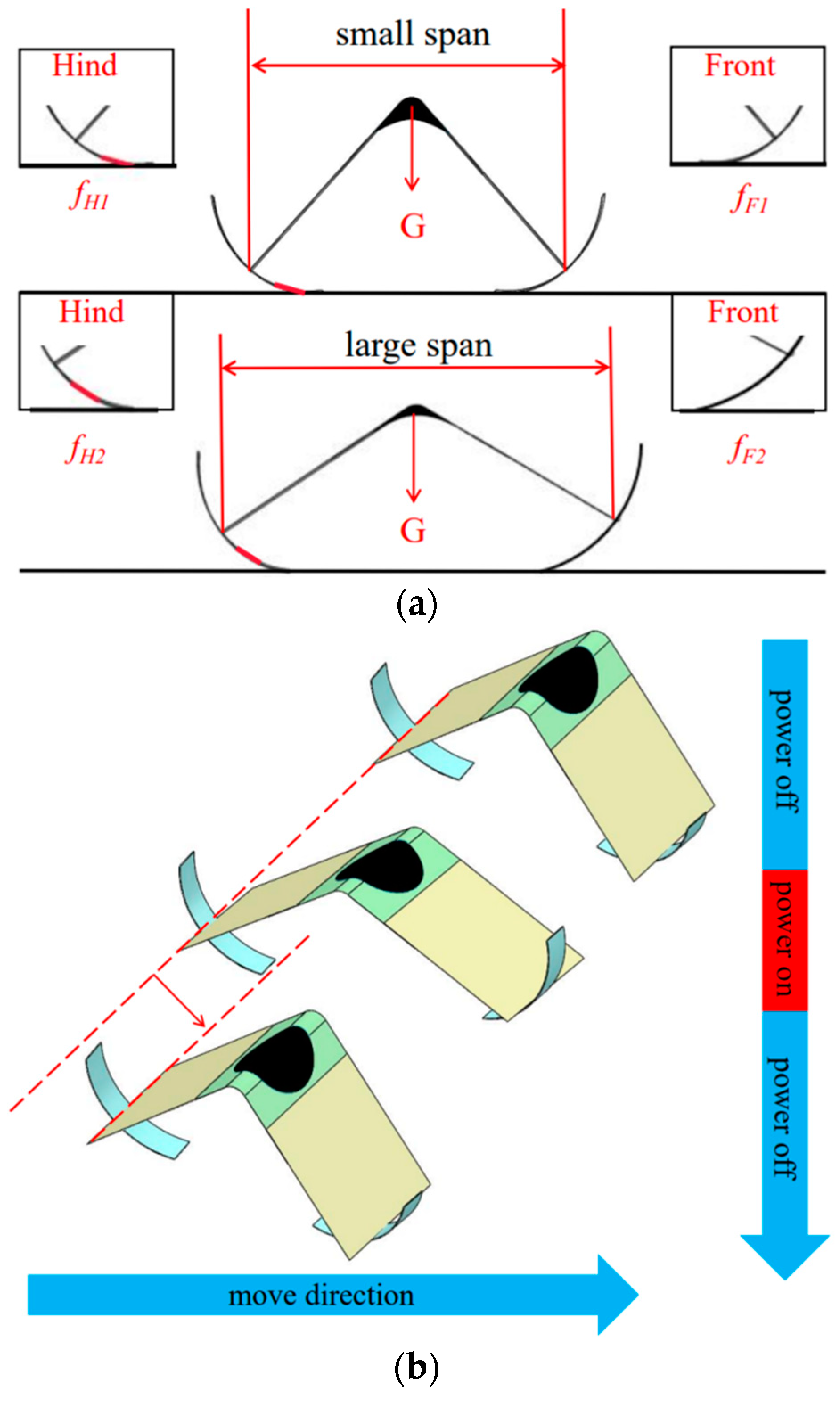
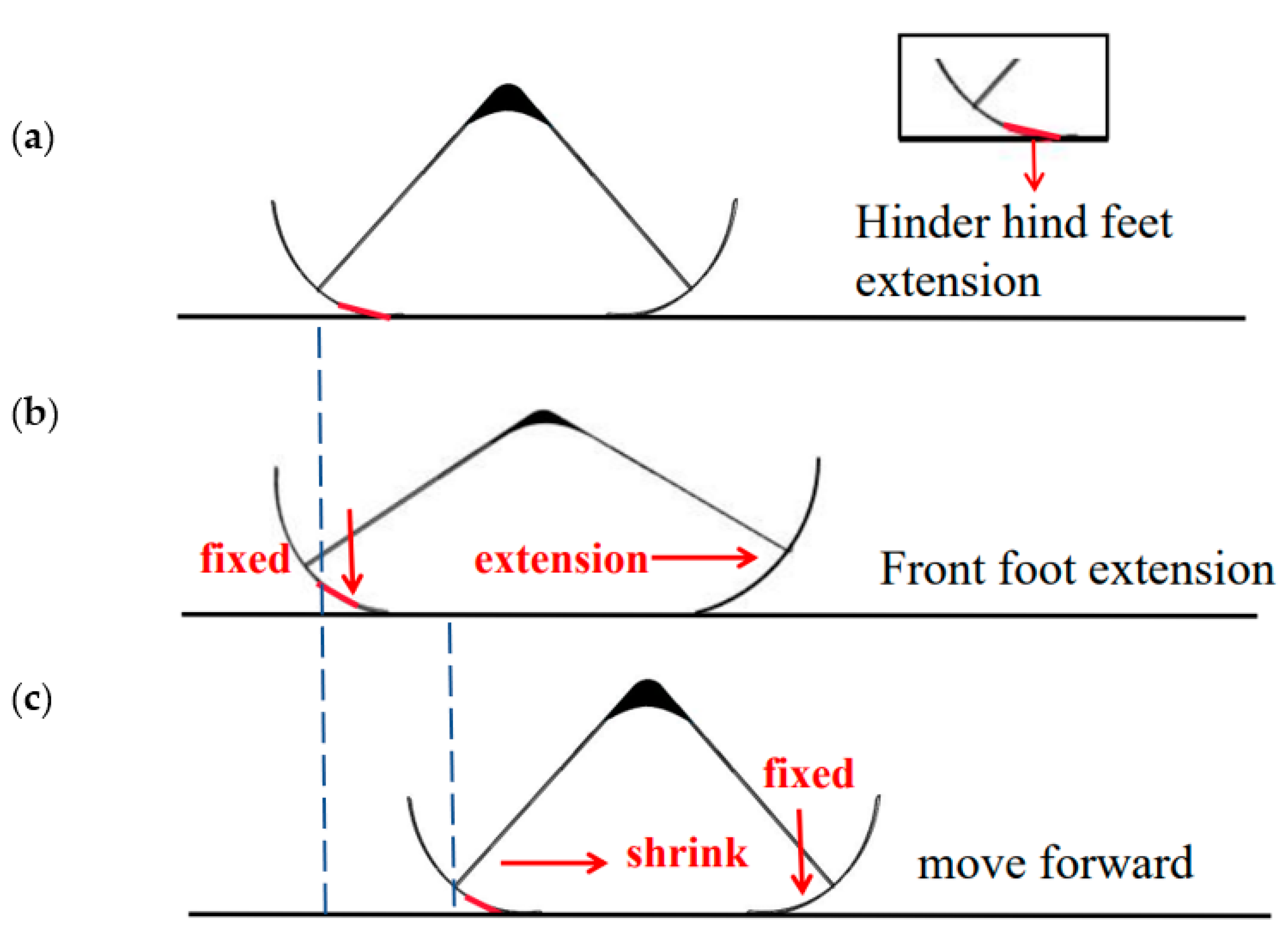
3.3. Principle of Forward Running
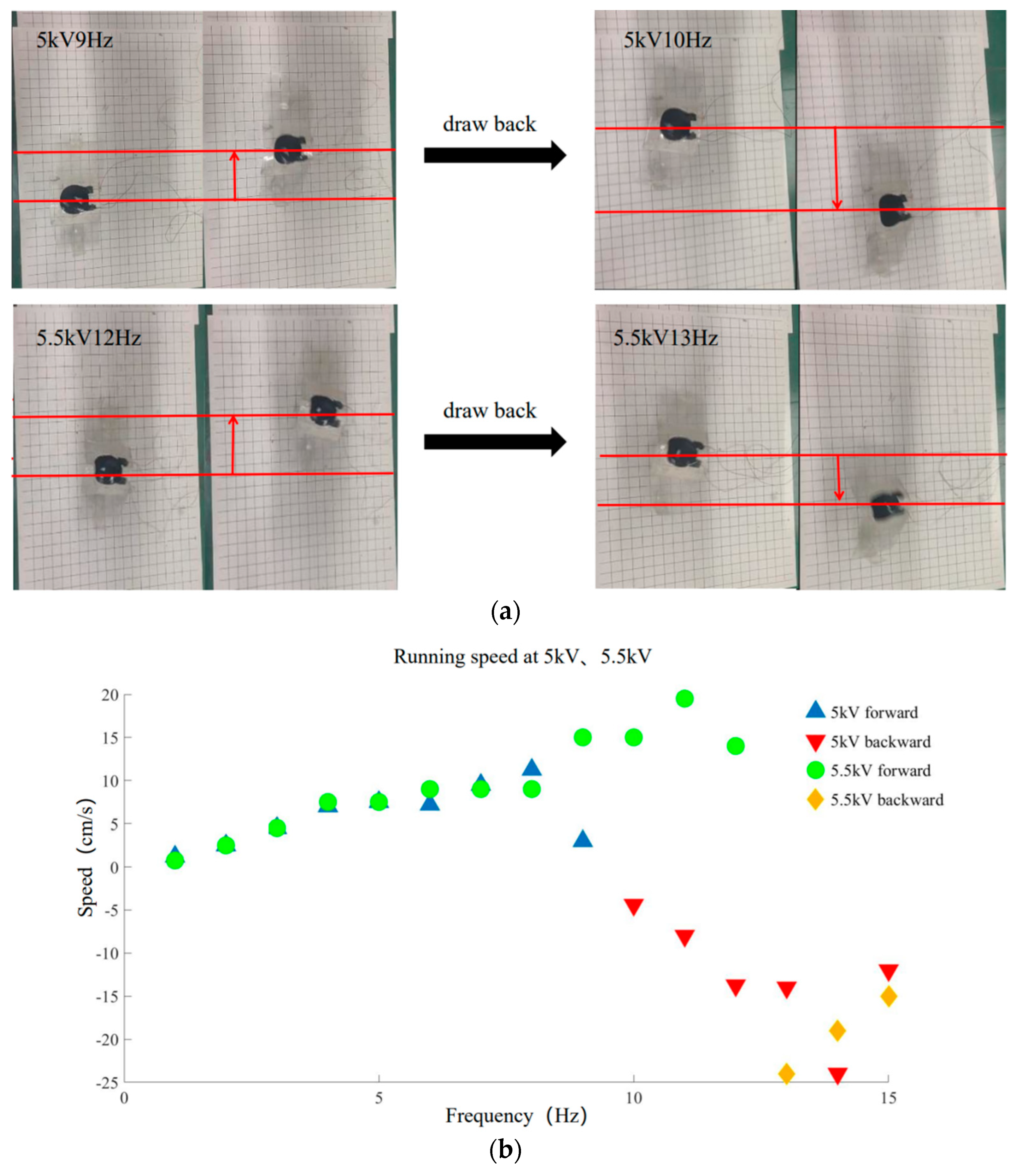
3.4. Principle of Backward Running
3.5. Principle of Jumping
4. Experiments and Results
4.1. Backward Running
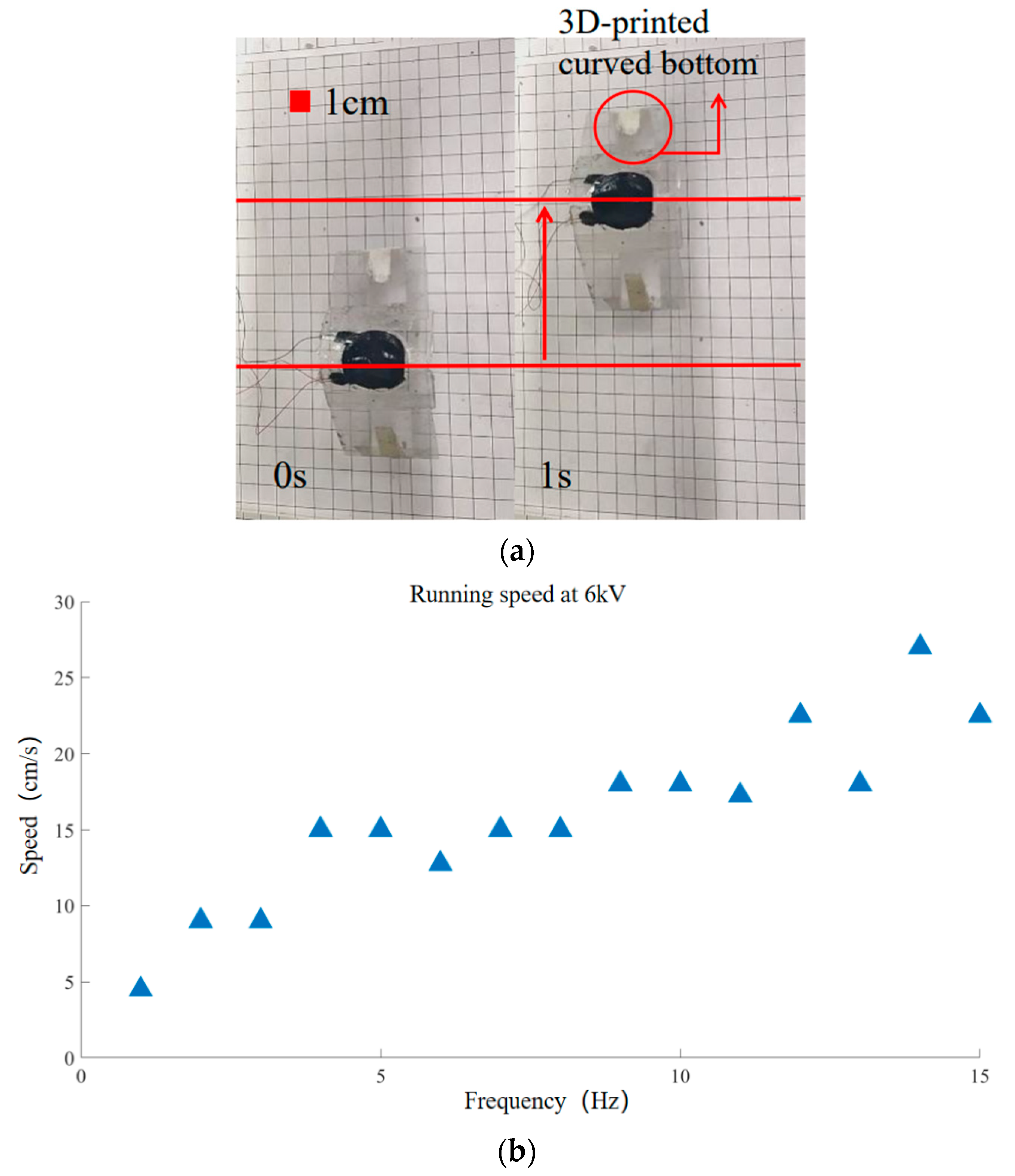
4.2. Forward Running
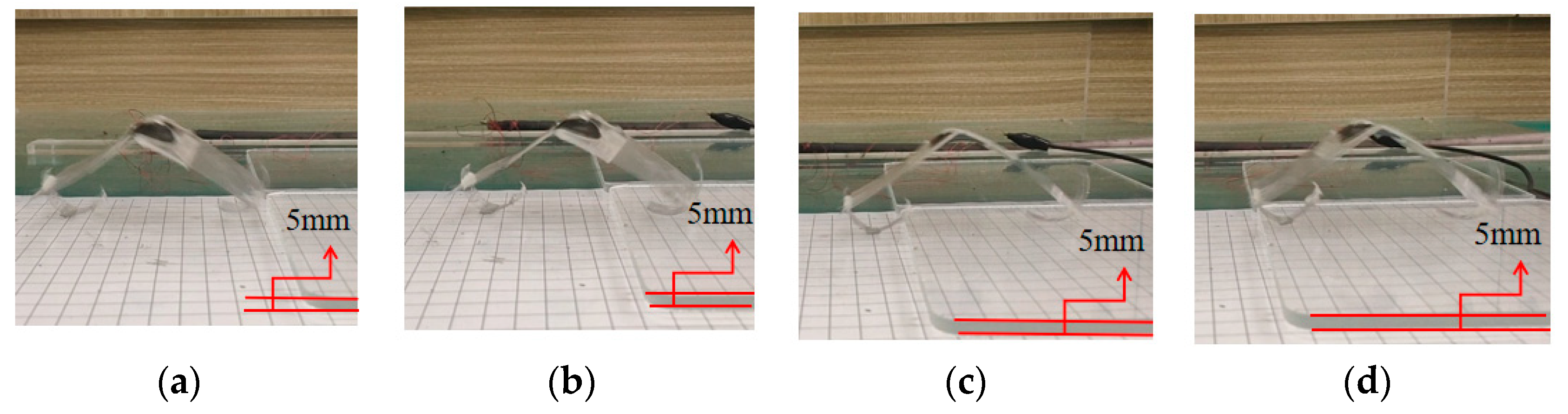
4.3. Jumping
5. Discussion
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Van Griethuijsen, L.I.; Trimmer, B.A. Locomotion in caterpillars. Biol. Rev. 2014, 89, 656–670. [Google Scholar]
- Cao, J.; Liang, W.; Wang, Y.; Lee, H.P.; Zhu, J.; Ren, Q. Control of a soft inchworm robot with environment adaptation. IEEE Trans. Ind. Electron. 2019, 67, 3809–3818. [Google Scholar]
- Nehme, H.; Aubry, C.; Solatges, T.; Savatier, X.; Rossi, R.; Boutteau, R. LiDAR-based Structure Tracking for Agricultural Robots: Application to Autonomous Navigation in Vineyards. J. Intell. Robot. Syst. 2021, 103, 61. [Google Scholar]
- Nashat, N.; Elsheikh, G.A.; Ouda, A.N.; Emara, T. Design and Implementation of a Wireless Medical Robot for Communication Within Hazardous Environments. Wirel. Pers. Commun. 2021, 122, 21–22. [Google Scholar]
- Duduta, M.; Berlinger, F.; Nagpal, R.; Clarke, D.R.; Wood, R.J.; Temel, F.Z. Tunable Multi-Modal Locomotion in Soft Dielectric Elastomer Robots. IEEE Robot. Autom. Lett. 2020, 5, 3868–3875. [Google Scholar]
- Bao, G.; Fang, H.; Chen, L.; Wan, Y.; Xu, F.; Yang, Q.; Zhang, L. Soft Robotics: Academic Insights and Perspectives Through Bibliometric Analysis. Soft Robot. 2018, 5, 229–241. [Google Scholar]
- Alici, G. Softer is Harder: What Differentiates Soft Robotics from Hard Robotics? MRS Adv. 2018, 3, 1557–1568. [Google Scholar]
- Wu, K.; Zheng, G. Simulation and control co-design methodology for soft robotics. In Proceedings of the 2020 39th Chinese Control Conference (CCC), Shenyang, China, 27–29 July 2020; pp. 3910–3914. [Google Scholar]
- Lee, H.T.; Kim, M.S.; Lee, G.Y.; Kim, C.-S.; Ahn, S.-H. Shape Memory Alloy (SMA)-Based Microscale Actuators with 60% Deformation Rate and 1.6 kHz Actuation Speed. Small 2018, 14, 1801023. [Google Scholar]
- Lee, Y.; Song, W.J.; Sun, J.Y. Hydrogel soft robotics. Mater. Today Phys. 2020, 15, 100258. [Google Scholar]
- Rukhlenko, I.D.; Farajikhah, S.; Lilley, C.; Georgis, A.; Large, M.; Fleming, S. Performance Optimization of Polymer Fibre Actuators for Soft Robotics. Polymers 2020, 12, 454. [Google Scholar]
- Walker, J.; Zidek, T.; Harbel, C.; Yoon, S.; Strickland, F.S.; Kumar, S.; Shin, M. Soft Robotics: A Review of Recent Developments of Pneumatic Soft Actuators. Actuators 2020, 9, 3. [Google Scholar]
- Fan, J.; Wang, S.; Yu, Q.; Zhu, Y. Swimming performance of the frog-inspired soft robot. Soft Robot. 2020, 7, 615–626. [Google Scholar]
- Meng, J.; Qiu, Y.; Hou, C.; Zhang, Q.; Li, Y.; Wang, H. Bistable dielectric elastomer actuator with directional motion. Sens. Actuators A: Phys. 2021, 330, 112889. [Google Scholar]
- Neu, J.; Hubertus, J.; Croce, S.; Schultes, G.; Seelecke, S.; Rizzello, G. Fully Polymeric Domes as High-Stroke Biasing System for Soft Dielectric Elastomer Actuators. Front. Robot. AI 2021, 8, 695918. [Google Scholar]
- Bruschi, A.; Donati, D.M.; Choong, P.; Lucarelli, E.; Wallace, G. Dielectric elastomer actuators, neuromuscular interfaces, and foreign body response in artificial neuromuscular prostheses: A review of the literature for an in vivo application. Adv. Healthc. Mater. 2021, 10, 2100041. [Google Scholar]
- Youn, J.-H.; Jeong, S.M.; Hwang, G.; Kim, H.; Hyeon, K.; Park, J.; Kyung, K.-U. Dielectric elastomer actuator for soft robotics applications and challenges. Appl. Sci. 2020, 10, 640. [Google Scholar]
- Franke, M.; Ehrenhofer, A.; Lahiri, S.; Henke, E.-F.M.; Wallmersperger, T.; Richter, A. Dielectric Elastomer Actuator Driven Soft Robotic Structures with Bioinspired Skeletal and Muscular Reinforcement. Front. Robot. AI 2020, 7, 510757. [Google Scholar]
- Guo, Y.; Liu, L.; Liu, Y.; Leng, J. Review of dielectric elastomer actuators and their applications in soft robots. Adv. Intell. Syst. 2021, 3, 2000282. [Google Scholar]
- Sharma, A.K.; Arora, N.; Joglekar, M.M. DC dynamic pull-in instability of a dielectric elastomer balloon: An energy-based approach. Proc. R. Soc. A Math. Phys. Eng. Sci. 2018, 474, 20170900. [Google Scholar]
- Sharma, A.K.; Bajpayee, S.; Joglekar, D.M.; Joglekar, M.M. Dynamic instability of dielectric elastomer actuators subjected to unequal biaxial prestress. Smart Mater. Struct. 2017, 26, 115019. [Google Scholar]
- Khurana, A.; Kumar, A.; Raut, S.K.; Sharma, A.K.; Joglekar, M. Effect of viscoelasticity on the nonlinear dynamic behavior of dielectric elastomer minimum energy structures. Int. J. Solids Struct. 2021, 208, 141–153. [Google Scholar]
- Sharma, A.K. Design of a command-shaping scheme for mitigating residual vibrations in dielectric elastomer actuators. J. Appl. Mech. 2020, 87, 021007. [Google Scholar]
- Conn, A.T.; Hinitt, A.D.; Wang, P. Soft segmented inchworm robot with dielectric elastomer muscles. Electroact. Polym. Actuators Devices (EAPAD) 2014, 9056, 638–647. [Google Scholar]
- Cao, J.; Qin, L.; Liu, J.; Ren, Q.; Foo, C.C.; Wang, H.; Lee, H.P.; Zhu, J. Untethered soft robot capable of stable locomotion using soft electrostatic actuators. Extrem. Mech. Lett. 2018, 21, 9–16. [Google Scholar]
- Zhao, J.; Zhang, J.; McCoul, D.; Hao, Z.; Wang, S.; Wang, X.; Huang, B.; Sun, L. Soft and fast hopping–running robot with speed of six times its body length per second. Soft Robot. 2019, 6, 713–721. [Google Scholar]
- Li, W.B.; Zhang, W.M.; Zou, H.X.; Peng, Z.-K.; Meng, G. Multisegment annular dielectric elastomer actuators for soft robots. Smart Mater. Struct. 2018, 27, 115024. [Google Scholar]
- Luo, B.; Li, B.; Yu, Y.; Meng, Y. A Jumping Robot Driven by a Dielectric Elastomer Actuator. Appl. Sci. 2020, 10, 2241. [Google Scholar]
- Yeh, C.Y.; Chen, C.Y.; Juang, J.Y. Soft hopping and crawling robot for in-pipe traveling. Extrem. Mech. Lett. 2020, 39, 100854. [Google Scholar]
- Duduta, M.; Berlinger FC, J.; Nagpal, R.; Clarke, D.R.; Wood, R.J.; Temel, F.Z. Electrically-latched compliant jumping mechanism based on a dielectric elastomer actuator. Smart Mater. Struct. 2019, 28, 09LT01. [Google Scholar]
- Pelrine, R.; Kornbluh, R.; Pei, Q. High-speed electrically actuated elastomers with strain greater than 100%. Science 2000, 287, 836–839. [Google Scholar]
- Li, T.; Zou, Z.; Mao, G.; Yang, X.; Liang, Y.; Li, C.; Qu, S.; Suo, Z.; Yang, W. Agile and resilient insect-scale robot. Soft Robot. 2019, 6, 133–141. [Google Scholar]
- Cao, J.; Liang, W.; Zhu, J.; Ren, Q. Control of a muscle-like soft actuator via a bioinspired approach. Bioinspiration Biomim. 2018, 13, 066005. [Google Scholar]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Author or Unit | Software Material Category | Maximum Speed (cm/s) | Function Comparison |
|---|---|---|---|
| Li et al. [27] | DE | 0.195 | Slow |
| Li et al. [32] | DE | 16.1 | Can only move forward |
| This paper | DE | 27/−24 | Can move forward and backward |
| Author or Unit | Software Material Category | Quantity of Materials | Maximum Jump Height (mm) | Function Comparison |
|---|---|---|---|---|
| Yeh et al. [29] | elastic ribbons | 6-piece | 60 | can only move in the pipe |
| Luo et al. [28] | DE | 20-layer | 45 | can only jump up |
| This paper | DE | 2-layer | 5 | can jump over obstacles |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jing, Z.; Li, Q.; Su, W.; Chen, Y. Dielectric Elastomer-Driven Bionic Inchworm Soft Robot Realizes Forward and Backward Movement and Jump. Actuators 2022, 11, 227. https://doi.org/10.3390/act11080227
Jing Z, Li Q, Su W, Chen Y. Dielectric Elastomer-Driven Bionic Inchworm Soft Robot Realizes Forward and Backward Movement and Jump. Actuators. 2022; 11(8):227. https://doi.org/10.3390/act11080227
Chicago/Turabian StyleJing, Zeying, Qingzhong Li, Wentai Su, and Yuan Chen. 2022. "Dielectric Elastomer-Driven Bionic Inchworm Soft Robot Realizes Forward and Backward Movement and Jump" Actuators 11, no. 8: 227. https://doi.org/10.3390/act11080227
APA StyleJing, Z., Li, Q., Su, W., & Chen, Y. (2022). Dielectric Elastomer-Driven Bionic Inchworm Soft Robot Realizes Forward and Backward Movement and Jump. Actuators, 11(8), 227. https://doi.org/10.3390/act11080227