Circular Spline Tooth Longitudinal Modification Design and Contact Analysis for Harmonic Drives with Short Flexspline

Abstract
1. Introduction
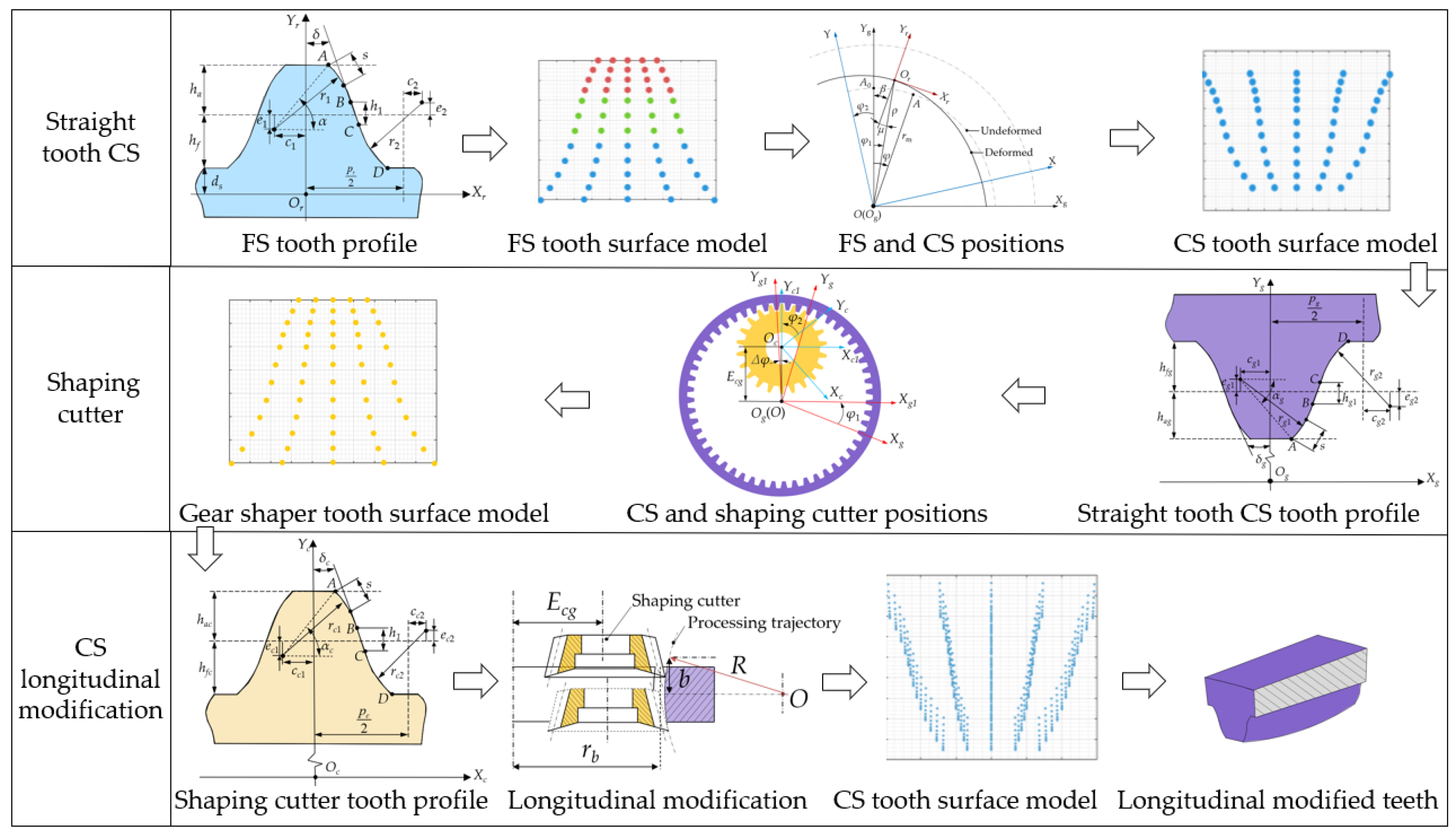
2. Tooth Longitudinal Modification for CS with DCTP
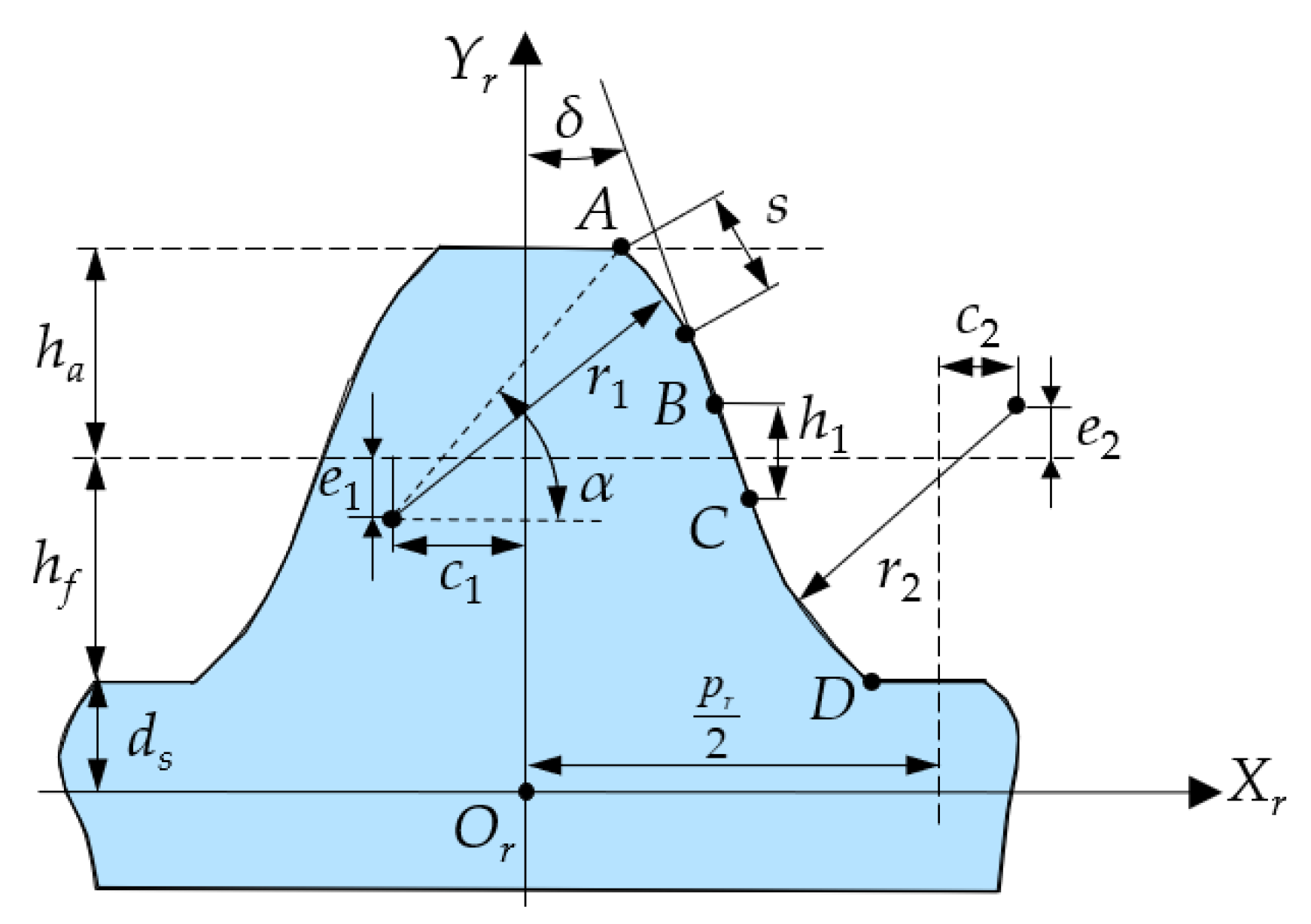
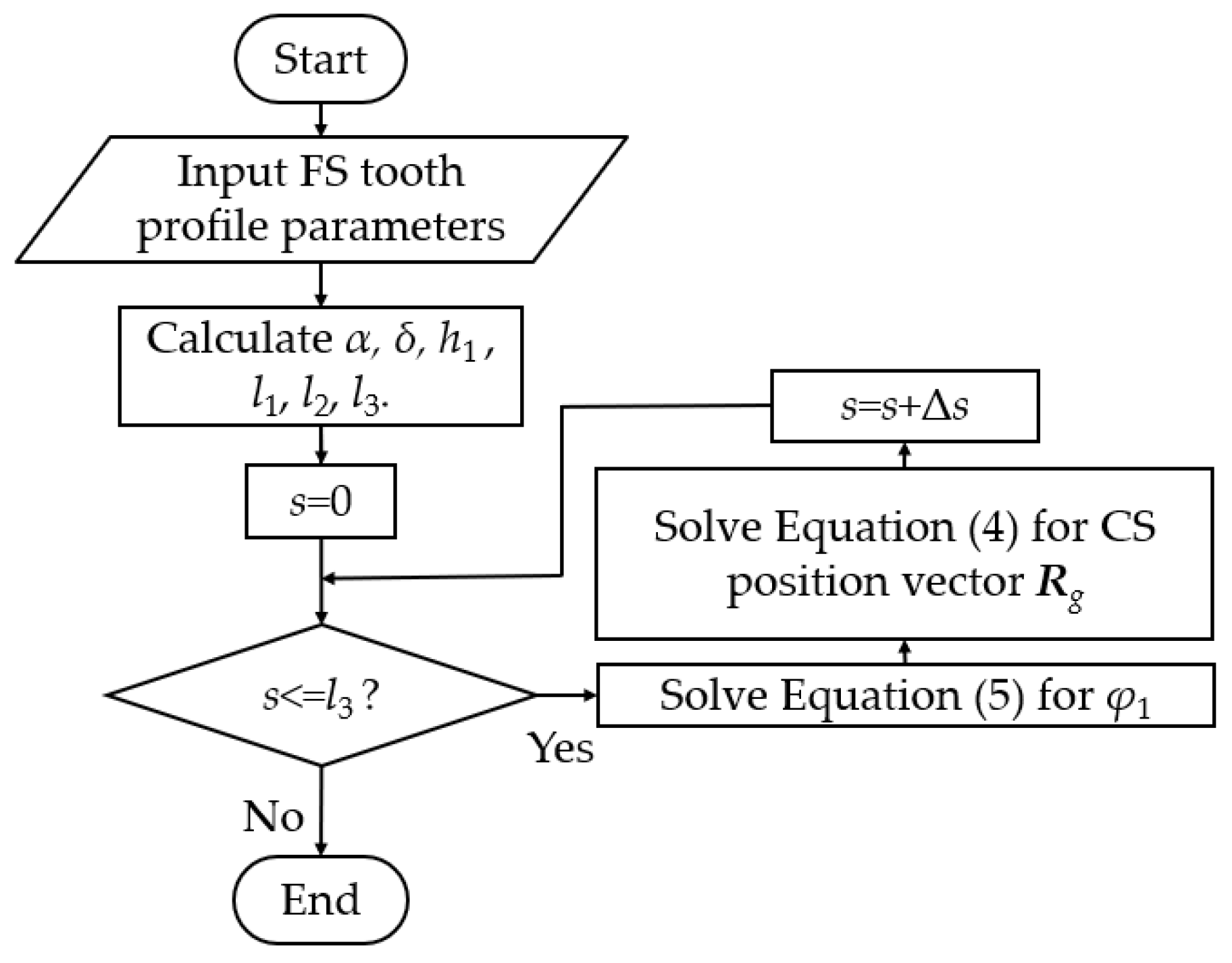
2.1. Straight Tooth CS
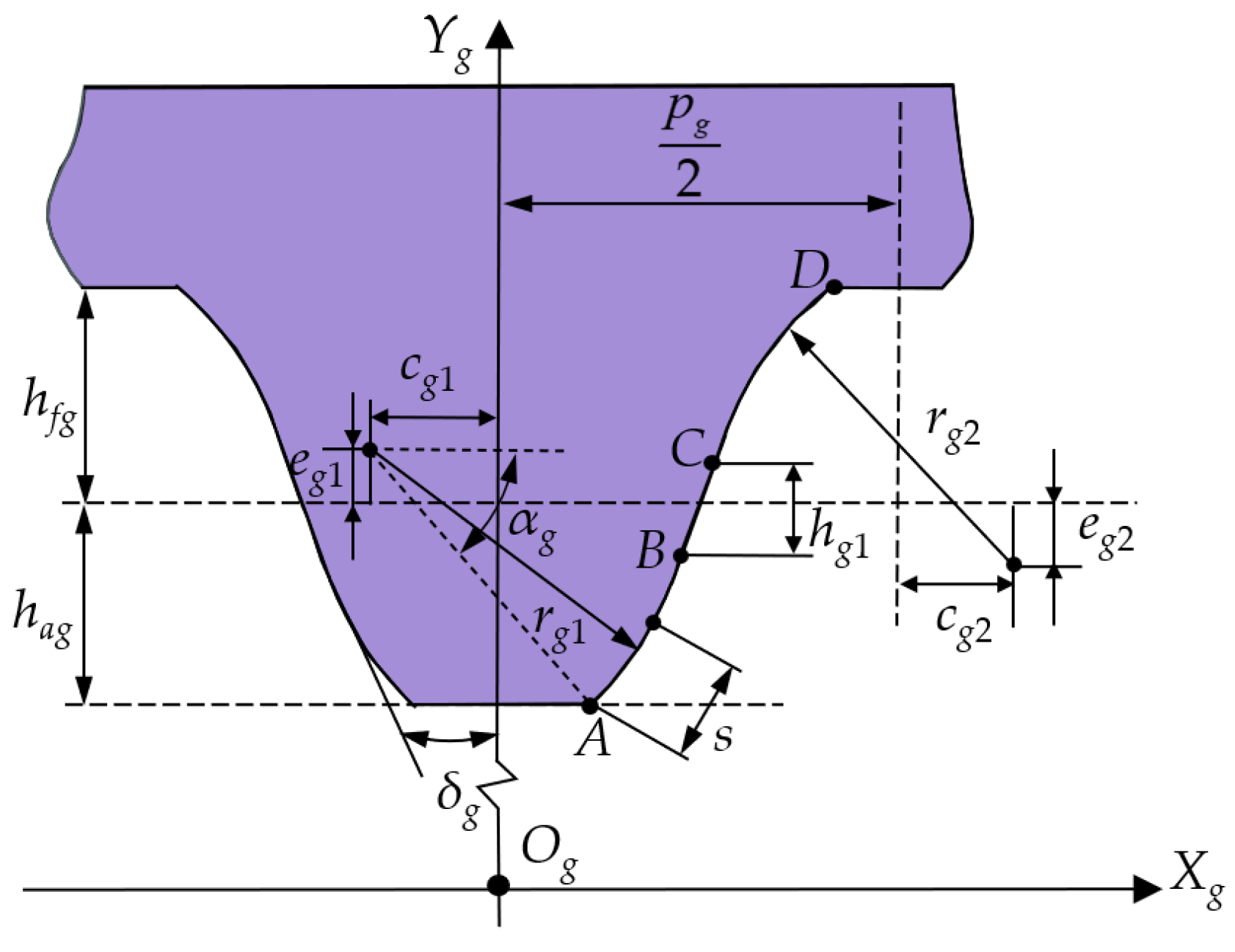
2.2. Shaping Cutter Tooth Profile
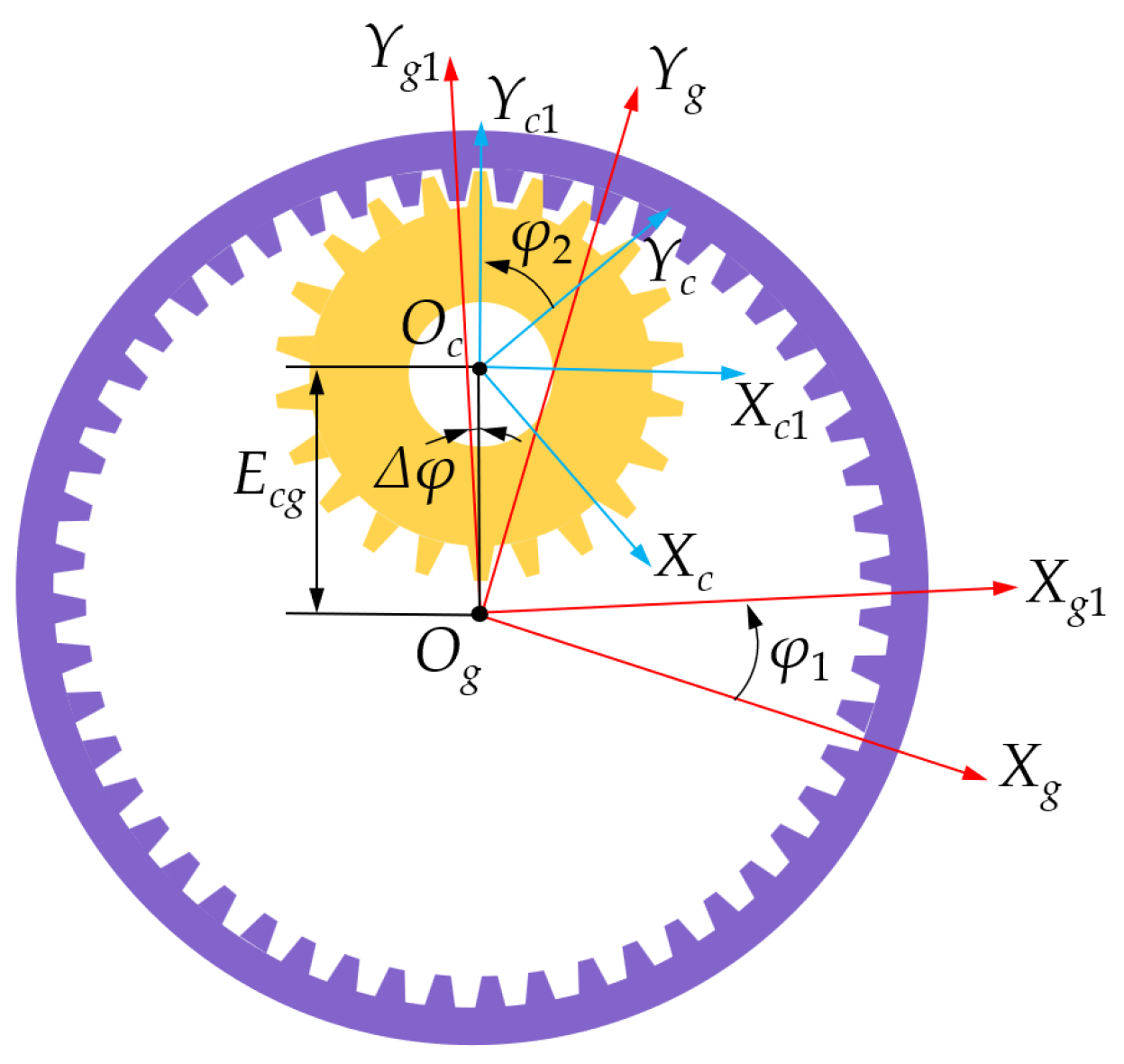
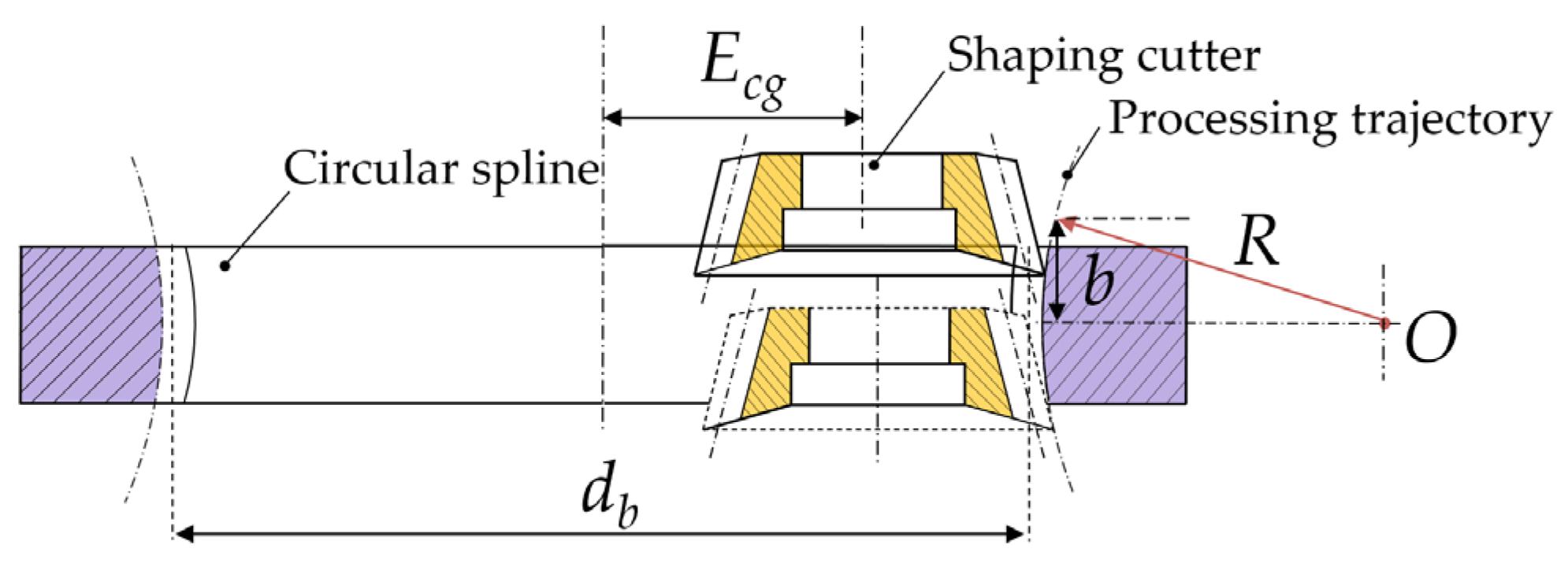
2.3. Longitudinal Modification of CS
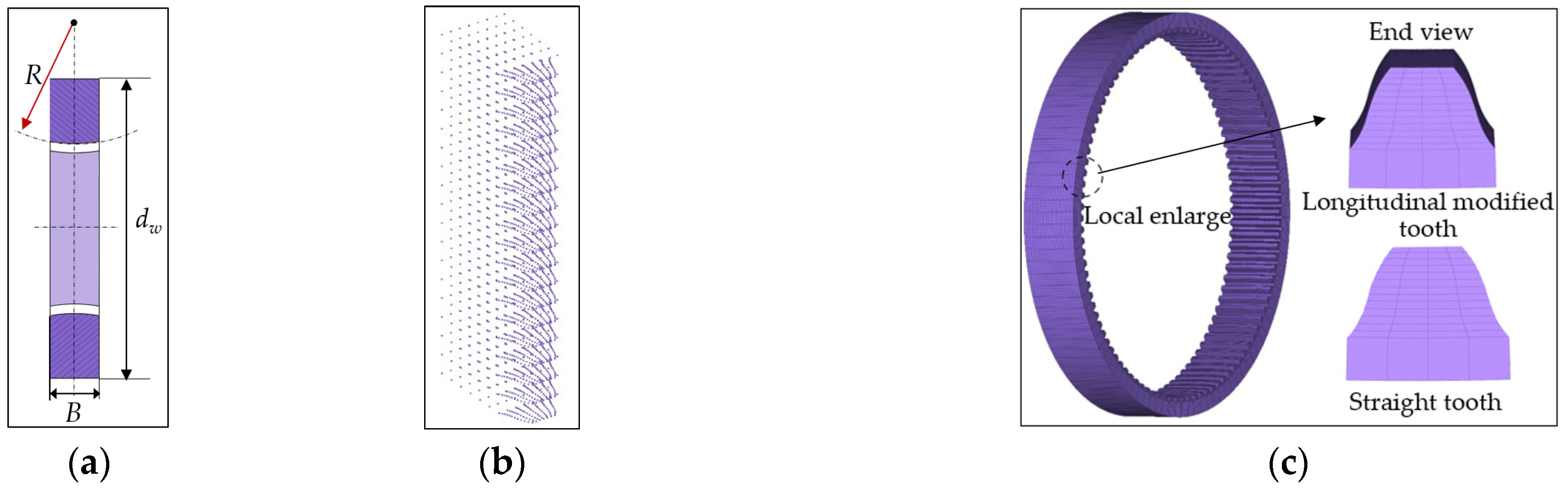
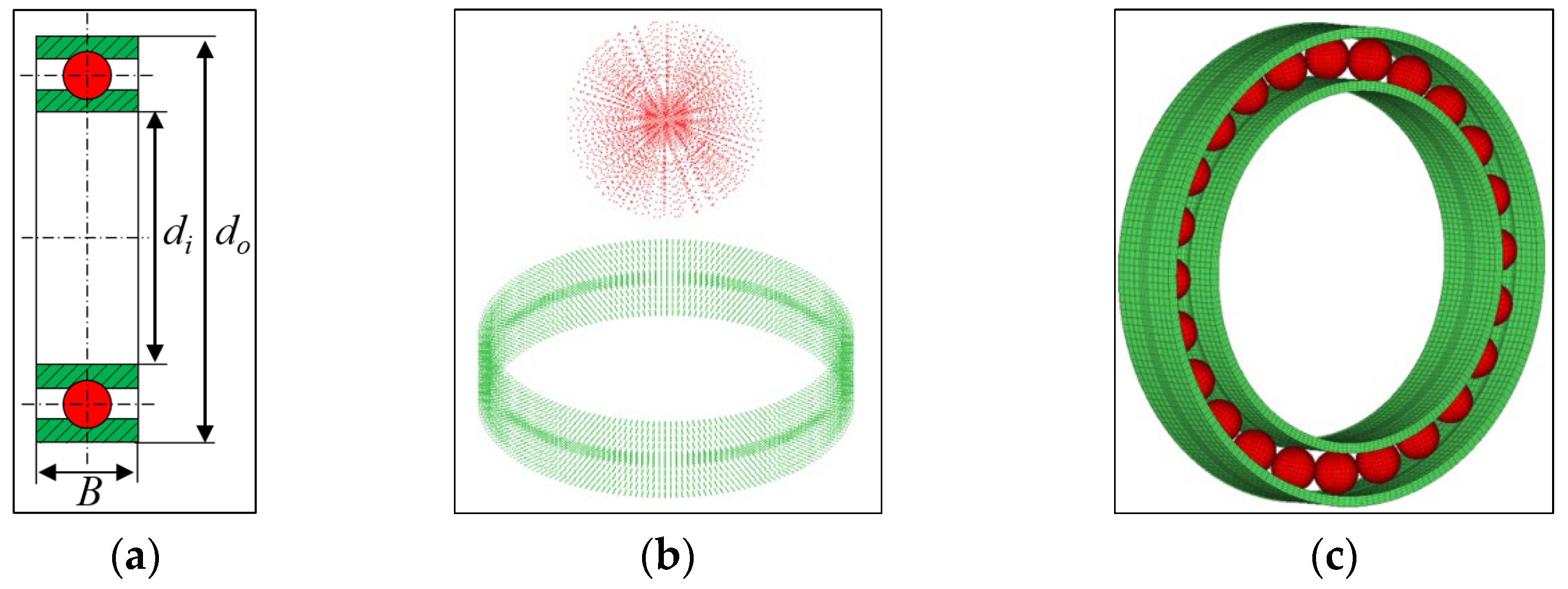
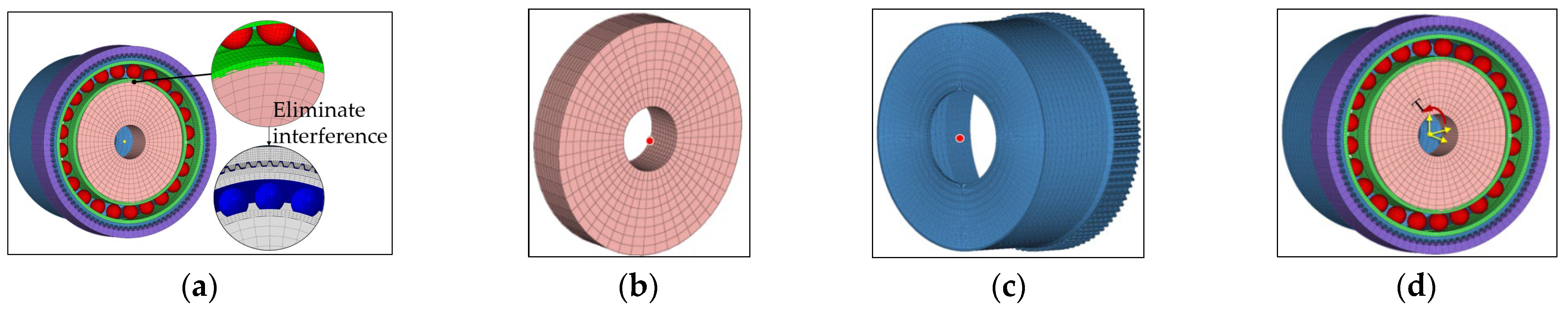
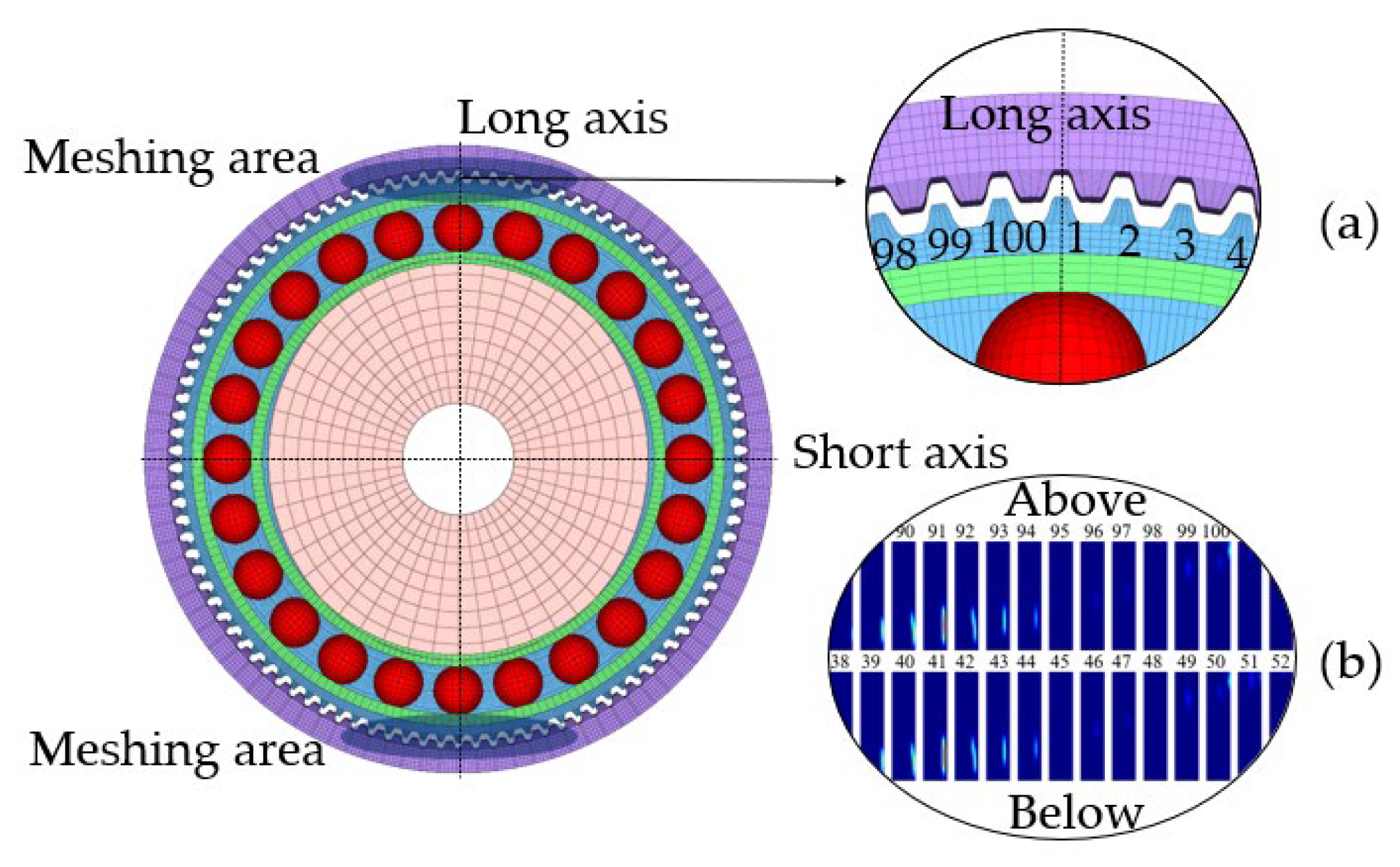
3. Parametric Finite Element Model of HDs
4. Results and Discussion
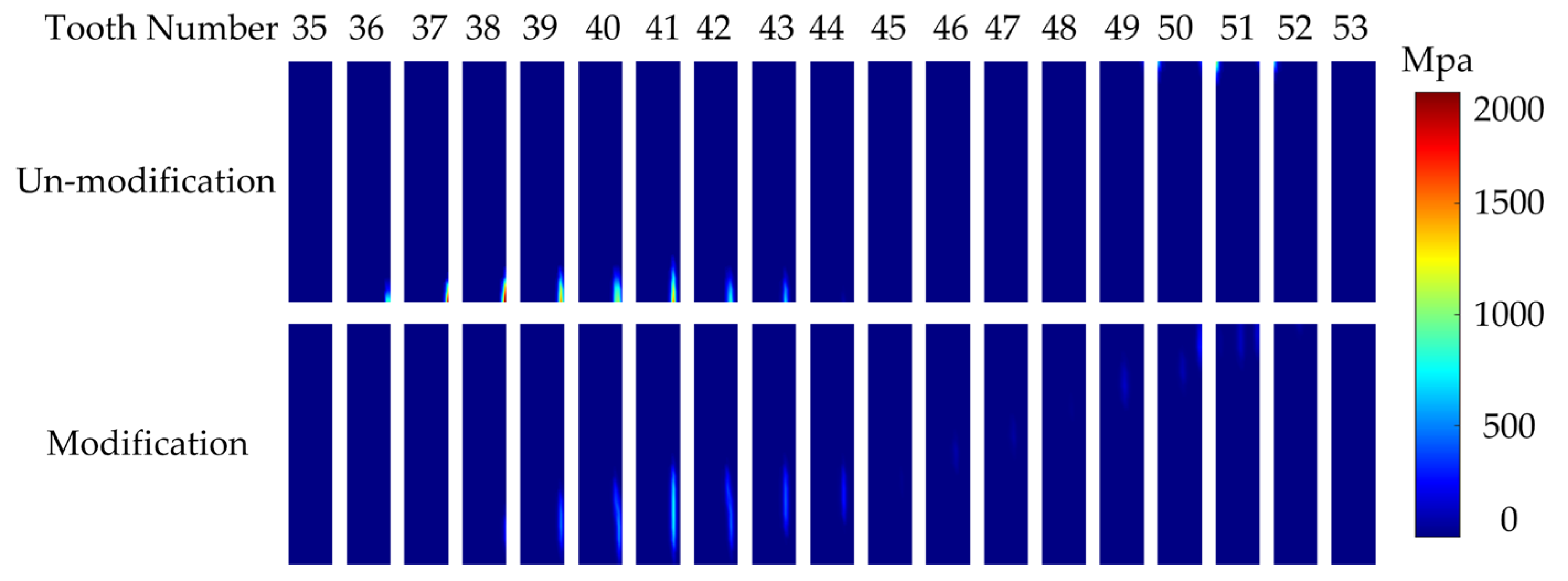
4.1. Comparison Between CS Teeth with and Without Longitudinal Modification
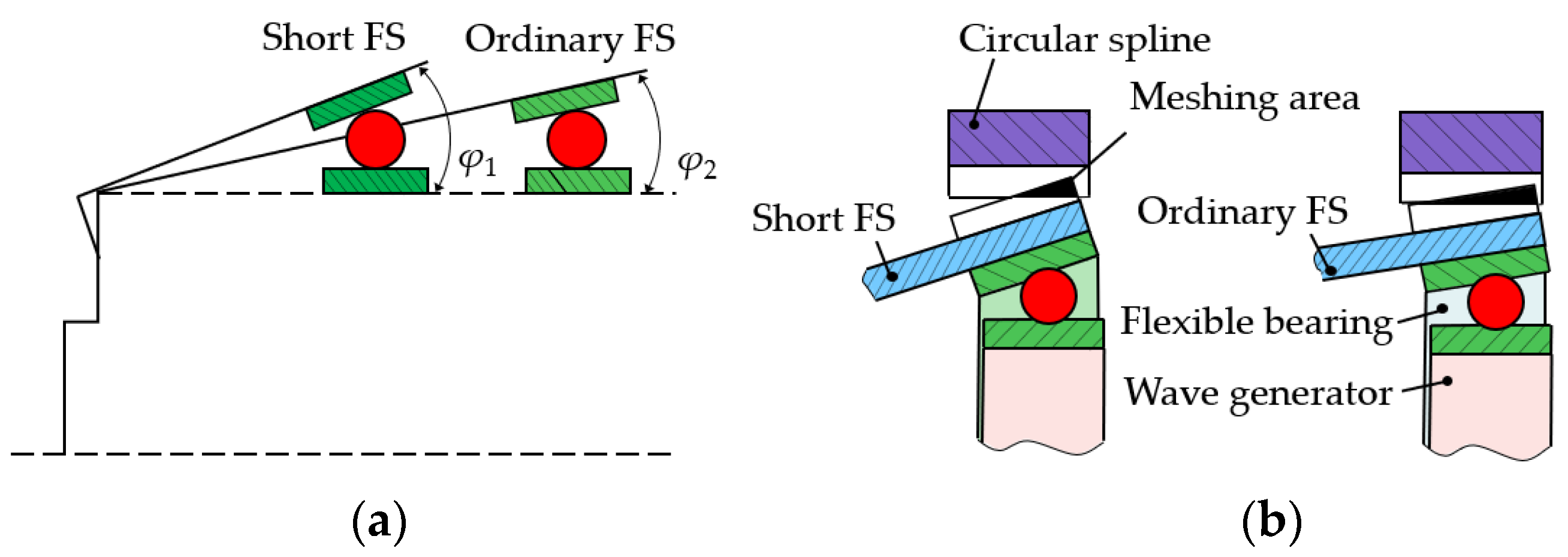
4.2. Effect of FS Length-to-Diameter Ratio on Contact Pressure and Load Sharing
- (1)
- CS teeth without longitudinal modification
- (2)
- CS teeth with longitudinal modification
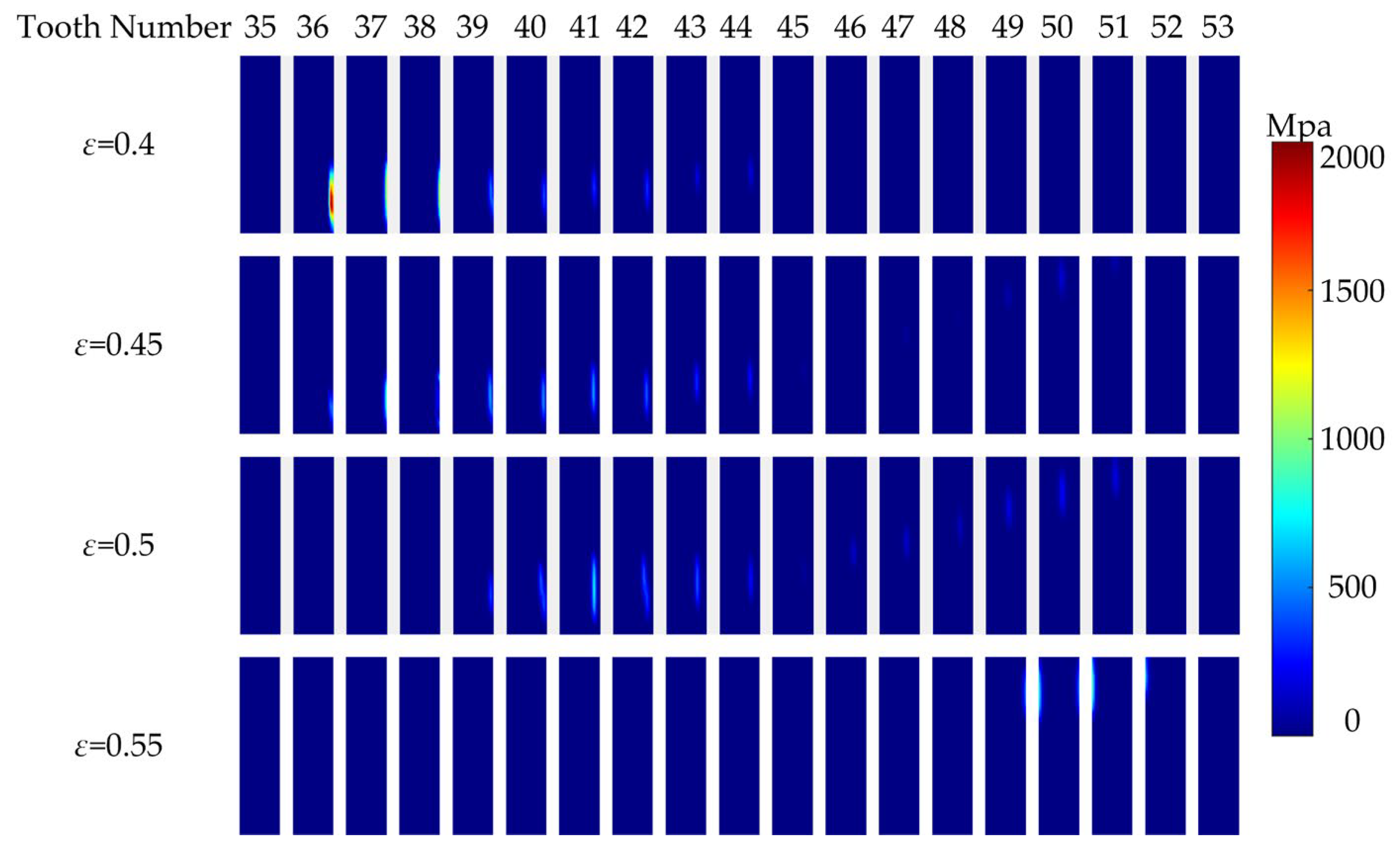
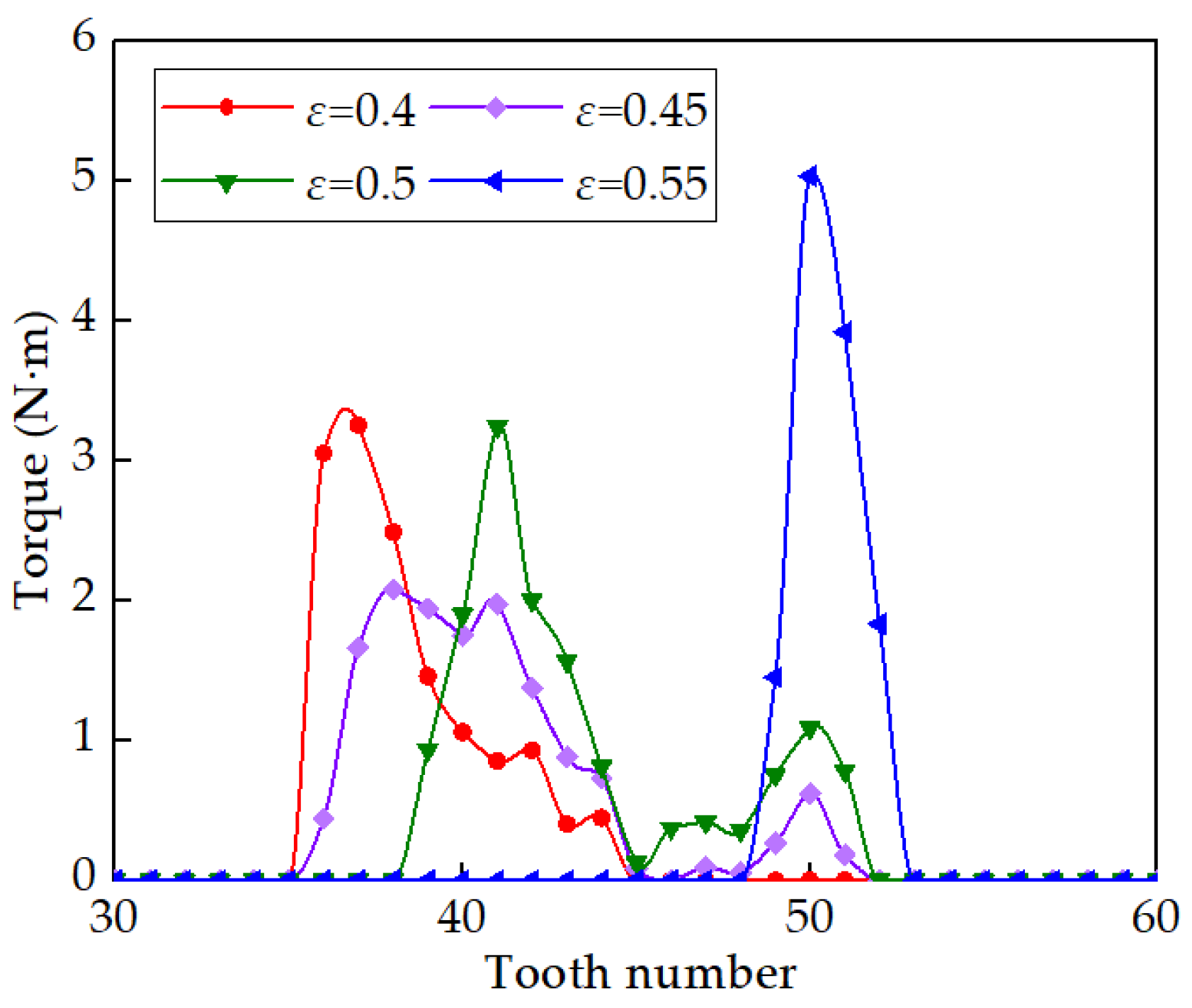
4.3. Effects of WG Profile on Contact Pressure and Load Sharing
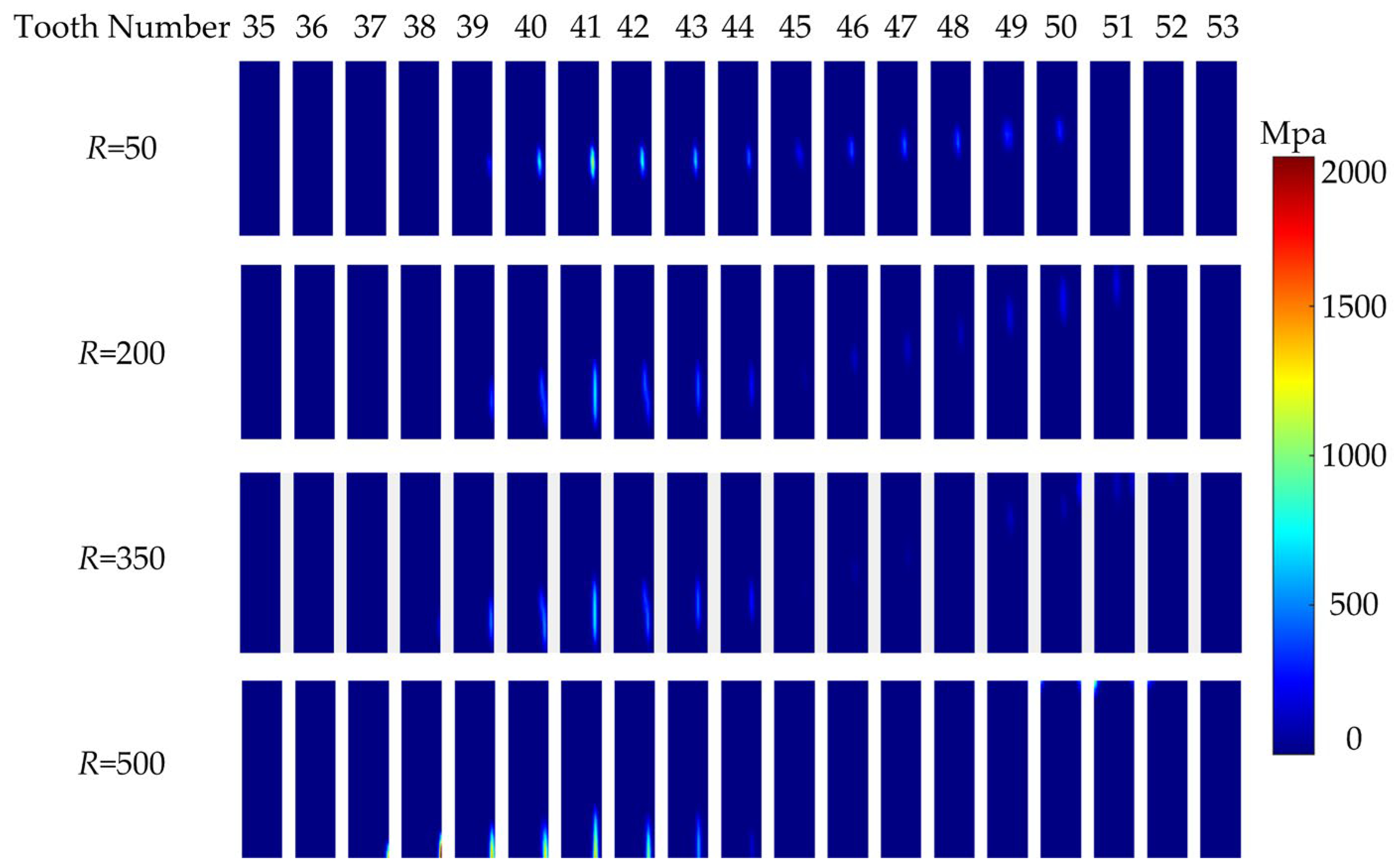
4.4. Effects of Modification Radius on Contact Pressure and Load Sharing
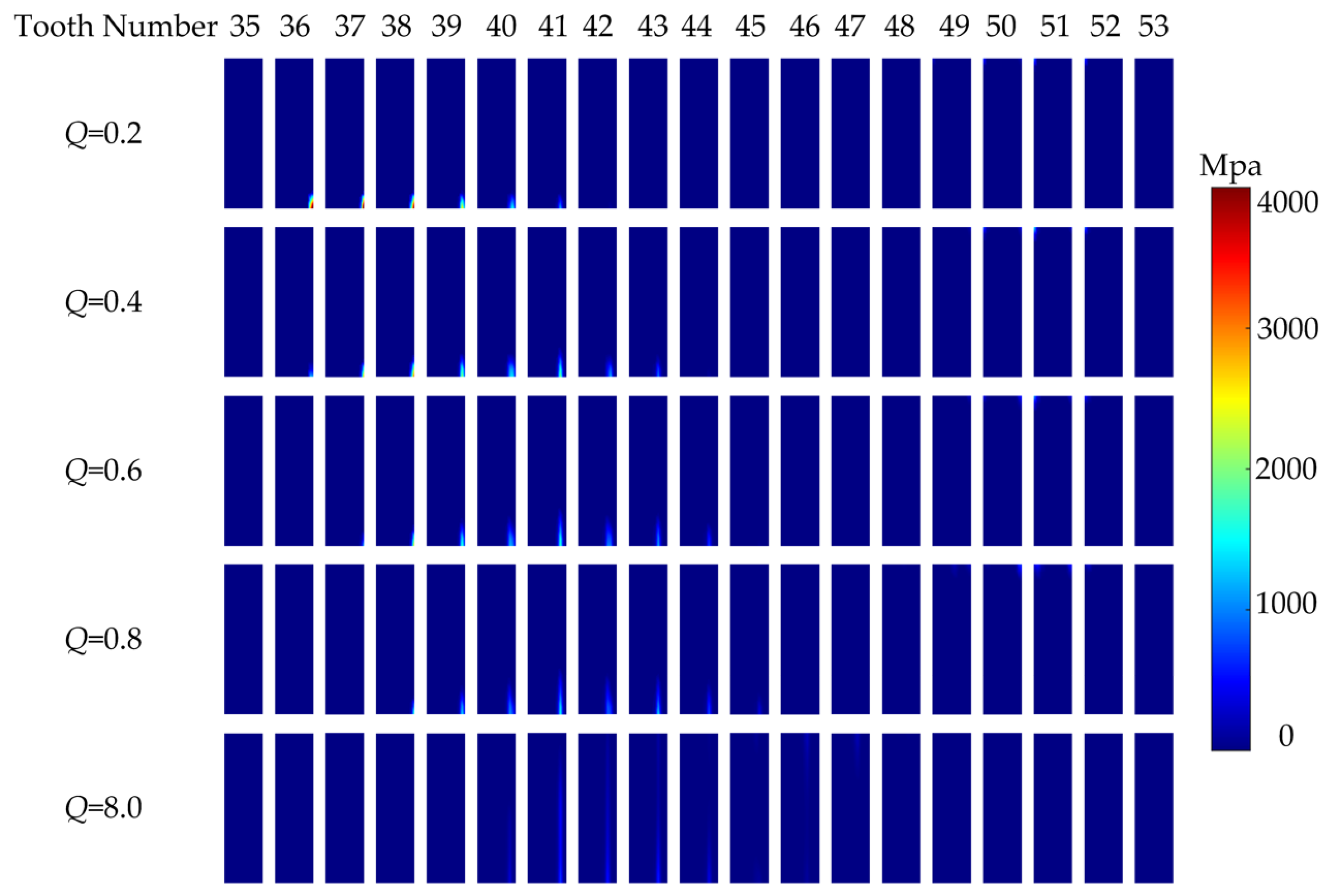
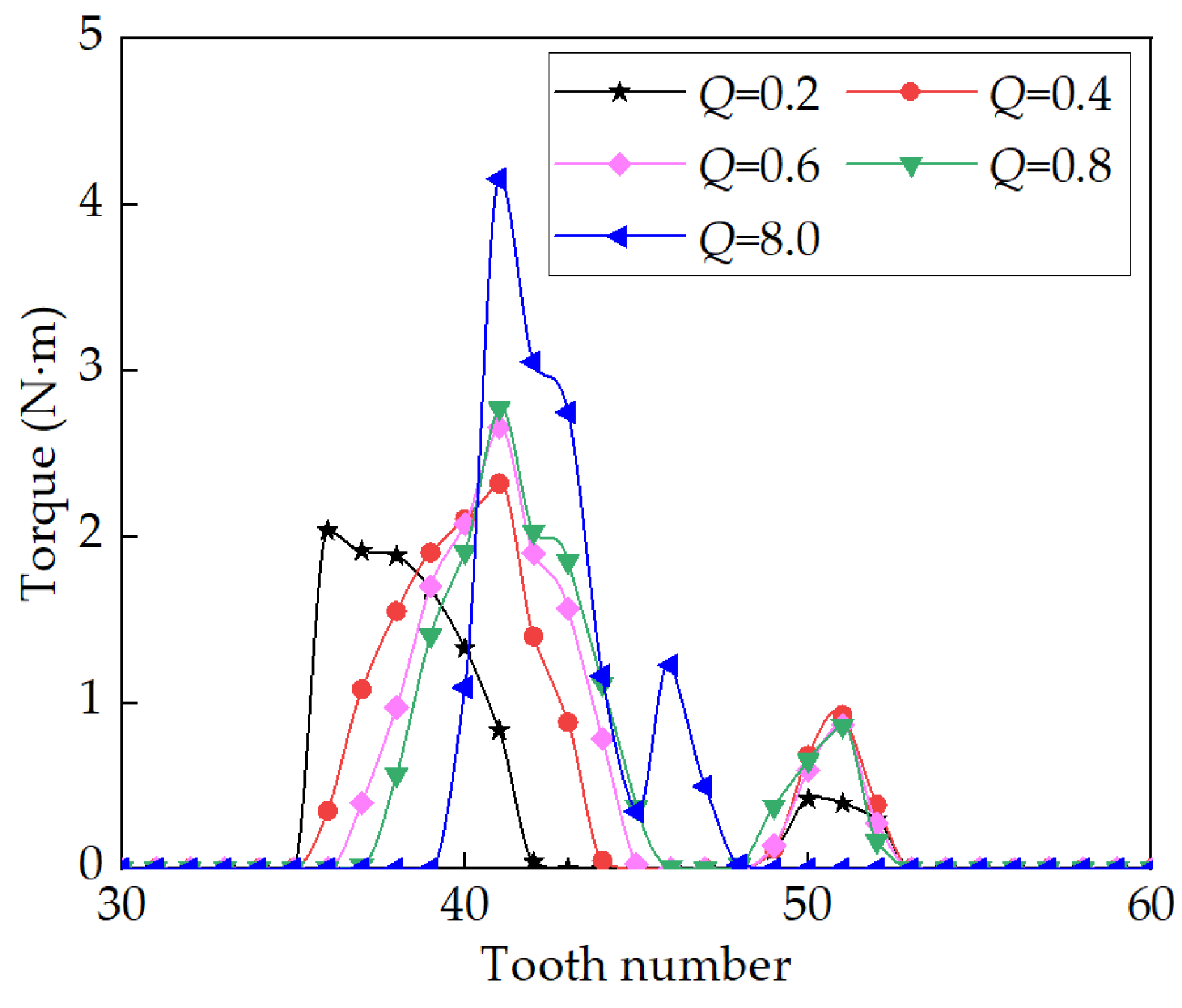
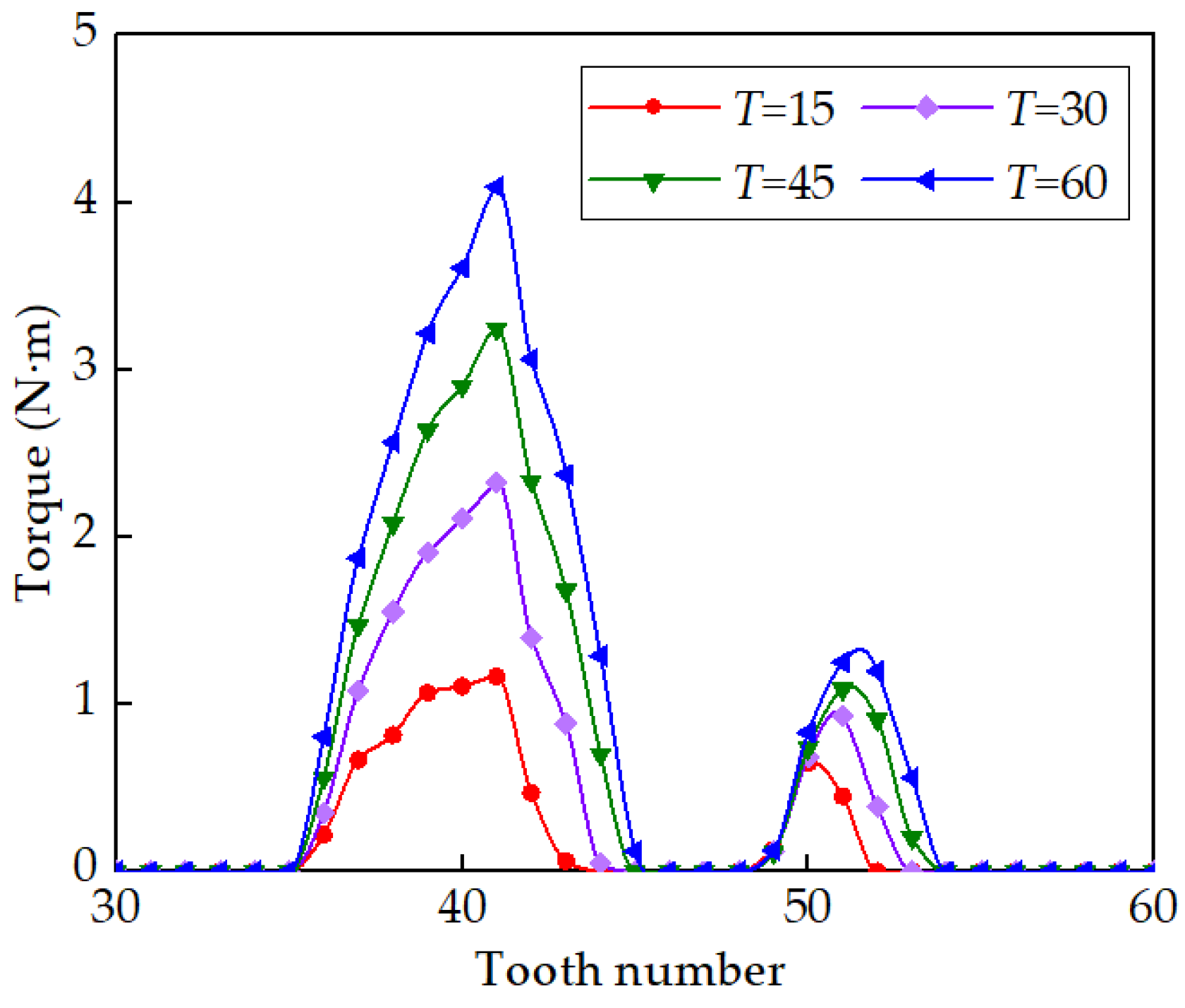
4.5. Effects of Torque on Contact Pressure and Load Sharing
5. Conclusions
- (1)
- The longitudinal modification of CS teeth can significantly decrease contact pressure, enhance contact area, and prevent stress concentration at the tooth end for short FS HDs.
- (2)
- As the FS length-to-diameter ratio increases, the contact area spans the entire tooth surface along the tooth width. Conversely, with a shorter ratio, contact pressure rises sharply, and the contact area diminishes.
- (3)
- With a fixed modification radius, contact pressure initially decreases and then increases as the FS length-to-diameter ratio rises. Modification improves tooth contact for short FS HDs, but becomes unnecessary or even harmful to achieve optimal contact performance when the ratio exceeds a certain threshold.
- (4)
- When the WG profile coefficient deviates from the intended radial deformation for the tooth, it leads to tooth contact at the tip of the FS, causing stress concentration. Additionally, this ratio has the most significant influence on load sharing among teeth compared to other parameters.
- (5)
- As the modification radius increases, the contact pressure exhibits a trend of decreasing first and then increasing. For short FS HDs, there exists an optimal modification radius that can achieve the best contact state.
- (6)
- With the increase in torque, the maximum contact pressure gradually rises, although at a slower rate. It is notable that the increase in torque does not change the position of the teeth’s contact area but rather adjusts its size.
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Zhao, J.; Wu, J.; Yan, S. Dynamic modeling and motion precision analysis of spacecraft manipulator with harmonic drive considering the alternate thermal field in orbit. Proc. Inst. Mech. Eng. Part G J. Aerosp. Eng. 2015, 229, 135–148. [Google Scholar] [CrossRef]
- He, Y.; Chen, J.; Zhou, X. In-situ fault diagnosis for the harmonic reducer of industrial robots via multi-scale mixed convolutional neural networks. J. Manuf. Syst. 2023, 66, 233–247. [Google Scholar] [CrossRef]
- Pham, A.D.; Ahn, H.J. Rigid precision reducers for machining industrial robots. Int. J. Precis. Eng. Manuf. 2021, 22, 1469–1486. [Google Scholar] [CrossRef]
- Xing, J.Z.; Pang, M.Y.; Zhang, Z. Optimum of short harmonic drive with variable thickness bottom. J. Tianjin Polytech. Univ. 2019, 38, 74–81. [Google Scholar]
- Li, S. Diaphragm stress analysis and fatigue strength evaluation of the flex-spline, a very thin-walled spur gear used in the strain wave gearing. Mech. Mach. Theory 2016, 104, 1–16. [Google Scholar] [CrossRef]
- Li, X.; Song, C.; Zhu, C.; Song, H. Load analysis of thin-walled flexible bearing in harmonic reducer considering assembly with flexspline and cam. Mech. Mach. Theory 2023, 180, 105154. [Google Scholar] [CrossRef]
- Li, F.; Li, X.; Guo, Y. Analysis of contact mechanical characteristics of flexible parts in harmonic gear reducer. Shock. Vib. 2021, 2021, 5521320. [Google Scholar] [CrossRef]
- Yang, C.; Hu, Q.; Liu, Z. Analysis of the partial axial load of a very thin-walled straight-gear (flexspline) of a harmonic drive. Int. J. Precis. Eng. Manuf. 2020, 21, 1333–1345. [Google Scholar] [CrossRef]
- Chen, G.; Li, H.; Liu, Y. Double-arc harmonic gear profile design and meshing analysis for multi-section conjugation. Adv. Mech. Eng. 2019, 11, 1687814019850656. [Google Scholar] [CrossRef]
- Song, C.; Zhu, F.; Li, X. Three-dimensional conjugate tooth surface design and contact analysis of harmonic drive with double-circular-arc tooth profile. Chin. J. Mech. Eng. 2023, 36, 83. [Google Scholar] [CrossRef]
- Zhang, Y.; Pan, X.; Li, Y. Meshing stiffness calculation of disposable harmonic drive under full load. Machines 2022, 10, 271. [Google Scholar] [CrossRef]
- Zhang, Y.; Wang, G.; Pan, X. Calculating the load distribution and contact stress of the disposable harmonic drive under full load. Machines 2022, 10, 96. [Google Scholar] [CrossRef]
- Ma, J.; Li, C.; Luo, Y. Simulation of meshing characteristics of harmonic reducer and experimental verification. Adv. Mech. Eng. 2018, 10, 1687814018767494. [Google Scholar] [CrossRef]
- Yao, Y.; Chen, X.; Xing, J. Tooth position and deformation of flexspline assembled with cam in harmonic drive based on force analysis. Chin. J. Mech. Eng. 2021, 34, 104. [Google Scholar] [CrossRef]
- Wang, S.; Jiang, G.; Mei, X. A rapid stress calculation method for short flexspline harmonic drive. Eng. Comput. 2019, 36, 1852–1867. [Google Scholar] [CrossRef]
- Qiu, L.; Chen, M.; Song, G. Study on three-dimensional elastic deformation characteristics of flexspline in harmonic drive based on Rayleigh-Ritz method with accelerated convergence strategy. J. Mech. Sci. Technol. 2023, 37, 3615–3629. [Google Scholar] [CrossRef]
- Ma, D.H.; Wu, J.N.; Liu, T. Deformation analysis of the flexspline of harmonic drive gears considering the driving speed effect using laser sensors. Sci. China Technol. Sci. 2017, 60, 1175–1187. [Google Scholar] [CrossRef]
- Luu, T.; Tran, T.; Wu, Y. A novel topology modification of spur gear flanks to enhance contact performance and lubrication ability. Mech. Mach. Theory 2024, 199, 105670. [Google Scholar] [CrossRef]
- Routh, B.; Maiti, R.; Ray, A.K. An investigation on secondary force contacts of tooth pairs in conventional harmonic drive with involute toothed gear set. Proc. Inst. Mech. Eng. Part C J. Mech. Eng. Sci. 2016, 230, 622–638. [Google Scholar] [CrossRef]
- Sahoo, V.; Maiti, R. Evidence of secondary tooth contact in harmonic drive, with involute toothed gear pair, through experimental and finite element analyses of pressures in flex-gear cup. Proc. Inst. Mech. Eng. Part C J. Mech. Eng. Sci. 2016, 232, 341–357. [Google Scholar] [CrossRef]
- Yang, C.; Ma, H.; Zhang, T. Calculation of tooth thickness errors and its adjustment on meshing backlash of harmonic drive. Int. J. Precis. Eng. Manuf. 2023, 24, 289–301. [Google Scholar] [CrossRef]
- Routh, B.; Sahoo, V.; Sobczyk, A. Performance analysis of asymmetric toothed strain wave gear. Proc. Inst. Mech. Eng. Part C J. Mech. Eng. Sci. 2021, 235, 7314–7328. [Google Scholar] [CrossRef]
- Yang, C.; Ma, H.; Zhang, T. Research on meshing characteristics of strain wave gearing with three different types of tooth profiles. Int. J. Precis. Eng. Manuf. 2021, 22, 1761–1775. [Google Scholar] [CrossRef]
- Ishikawa, S. Tooth Profile of Spline of Strain Wave Gearing. U.S. Patent 4823638, 25 April 1989. [Google Scholar]
- Ishikawa, S.; Kiyosawa, Y. Flexing Contact Type Gear Drive of Non-Profile-Shifted Two-Circular-Arc Composite Tooth Profile. U.S. Patent 5458023, 17 October 1995. [Google Scholar]
- Song, C.; Li, X.; Yang, Y. Parameter design of double-circular-arc tooth profile and its influence on meshing characteristics of harmonic drive. Mech. Mach. Theory 2022, 167, 104567. [Google Scholar] [CrossRef]
- Cheng, Y.H.; Chen, Y.C. A general mathematical modeling and finite element analysis of a strain wave gear possessing a double-circular-arc-with-a-common-tangent profile. Proc. Inst. Mech. Eng. Part C J. Mech. Eng. Sci. 2023, 237, 223–236. [Google Scholar] [CrossRef]
- Chen, X.; Liu, Y.; Xing, J.; Lin, S.; Xu, W. The parametric design of double-circular-arc tooth profile and its influence on the functional backlash of harmonic drive. Mech. Mach. Theory 2014, 73, 1–24. [Google Scholar] [CrossRef]
- Song, C.; Li, X.; Zhu, C.; Du, X. Parametric analysis of tooth surface characteristics of flexspline in harmonic reducer after hobbing. Mech. Mach. Theory 2024, 194, 105585. [Google Scholar] [CrossRef]
- Yang, H.; Li, X.; Xu, J.; Guo, Y.; Li, B. Modeling and Fatigue Characteristic Analysis of the Gear Flexspline of a Harmonic Reducer. Mathematics 2022, 10, 868. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Parameter Definition | Parameter | Parameter Definition |
|---|---|---|---|
| ha | Addendum | c1 | Center displacement of convex arc |
| hf | Dedendum | c2 | Center displacement of concave arc |
| h1 | Straight tooth profile height | δ | Common tangent inclination angle |
| e1 | Offset of convex arc center | ds | Wall thickness of flexspline cylinder |
| e2 | Offset of concave arc center | r1 | Convex arc radius |
| α | Tooth tip pressure angle | r2 | Concave arc radius |
| kt | Tooth thickness coefficient | m | Modulus |
| Parameter | Parameter Definition | Parameter | Parameter Definition |
|---|---|---|---|
| hag | Addendum | c1g | Center displacement of convex arc |
| hfg | Dedendum | c2g | Center displacement of concave arc |
| h1g | Linear tooth profile height | δg | Common tangent inclination angle |
| c1g | Offset of convex arc center | αg | Tooth tip pressure angle |
| c2g | Offset of concave arc center | rg | Reference radius |
| r1g | Convex arc radius | m | Modulus |
| r2g | Concave arc radius |
| Parameter | Value | Parameter | Value |
|---|---|---|---|
| ha (mm) | 0.3 | hag (mm) | 0.35 |
| hf (mm) | 0.4 | hfg (mm) | 0.35 |
| h1 (mm) | 0.1508 | h1g (mm) | 0.1463 |
| c1 (mm) | 0.3912 | c1g (mm) | 0.3416 |
| c2 (mm) | 0.2874 | c2g (mm) | 0.3327 |
| e1 (mm) | 0.0732 | e1g (mm) | 0.0746 |
| e2 (mm) | 0.15 | e2g (mm) | 0.1485 |
| r1 (mm) | 0.67 | r1g (mm) | 0.6724 |
| r2 (mm) | 0.8 | r2g (mm) | 0.7964 |
| α (°) | 33.79 | αg (°) | 38.53 |
| δ (°) | 14.74 | δg (°) | 14.56 |
| ds (mm) | 0.4 | rg (mm) | 25.5 |
| m (mm) | 0.5 | Zr | 100 |
| Zg | 102 | Q | 0.4 |
| ω0 | 0.5 | R (mm) | 200 |
| T (N·m) | 30 | ε | 0.5 |
| Parameter | Material | Young’s Modulus E (GPa) | Poisson’s Ratio v |
|---|---|---|---|
| FS | 30CrMnNi | 204 | 0.3 |
| CS | QT400 | 207 | 0.3 |
| WG | GCr15 | 217 | 0.3 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
He, X.; Feng, H.; Zhang, M.; Shen, Z.; Liu, B.; Su, P.; Liu, H.; Guan, Y. Circular Spline Tooth Longitudinal Modification Design and Contact Analysis for Harmonic Drives with Short Flexspline. Machines 2024, 12, 777. https://doi.org/10.3390/machines12110777
He X, Feng H, Zhang M, Shen Z, Liu B, Su P, Liu H, Guan Y. Circular Spline Tooth Longitudinal Modification Design and Contact Analysis for Harmonic Drives with Short Flexspline. Machines. 2024; 12(11):777. https://doi.org/10.3390/machines12110777
Chicago/Turabian StyleHe, Xingyu, Hesheng Feng, Menghan Zhang, Zaishang Shen, Boyang Liu, Peng Su, Haoyu Liu, and Yabin Guan. 2024. "Circular Spline Tooth Longitudinal Modification Design and Contact Analysis for Harmonic Drives with Short Flexspline" Machines 12, no. 11: 777. https://doi.org/10.3390/machines12110777
APA StyleHe, X., Feng, H., Zhang, M., Shen, Z., Liu, B., Su, P., Liu, H., & Guan, Y. (2024). Circular Spline Tooth Longitudinal Modification Design and Contact Analysis for Harmonic Drives with Short Flexspline. Machines, 12(11), 777. https://doi.org/10.3390/machines12110777