Abstract
In this study, we research a nonautonomous, three-species, delayed reaction–diffusion predator–prey model (RDPPM). Firstly, we derive sufficient conditions to guarantee the existence of a strictly positive, spatially homogeneous periodic solution (SHPS) for the delayed, nonautonomous RDPPM. These conditions are obtained using the comparison theorem for delayed differential equations and the fixed point theorem. Secondly, we present sufficient conditions to ensure the global asymptotic stability of the SHPS for the delayed, nonautonomous RDPPM. These conditions are established through the application of the upper and lower solution method (UALSM) for delayed parabolic partial differential equations (PDEs), along with Lyapunov stability theory. Finally, to demonstrate the practical application of our results, we numerically validate the proposed conditions using a 2-periodic, delayed, nonautonomous RDPPM.
MSC:
35B10; 35B35; 34K60
1. Introduction
In this study, our focus is on the following nonautonomous, three-species, delayed Lotka–Volterra RDPPM, formulated as follows
with Neumann boundary conditions and positive initial conditions
In recent years, with the continuous improvement of reaction–diffusion equation theory, research on the properties of the reaction–diffusion predator–prey model (RDPPM) has attracted increasing attention from scholars [12,13]. Especially, research on the stability of periodic solutions and the permanence of RDPPM has achieved more and more excellent results. For example, in 2013, Ko and Ahn [14] investigated an RDPPM with one prey and two competing predators and obtained some judgment criteria to ensure the persistence and attractiveness of the solution of the model. In 2015, Moussaoui [15] researched an RDPPM with homogeneous Neumann boundary conditions and achieved some conditions to guarantee the existence and global stability of the positive periodic solution of the model. In 2017, Wang [16] studied an RDPPM with two predators and one prey and obtained sufficient conditions to guarantee the existence of time-periodic solutions for the model. In 2020, Wu and Zhao [17] investigated an RDPPM with the Allee effect and threshold hunting and provided some conditions to ensure the asymptotic stability of the equilibrium point of the model by constructing a Jacobian matrix. In 2021, Montano and Lisena [18] studied an RDPPM with a Holling-type II functional response and obtained some sufficient conditions ensuring the extinction of one predator and the stable coexistence of the surviving predator and its prey. In 2022, Yan and Zhang [19] investigated an RDPPM with a B-D function response and obtained stability and instability criteria for the positive constant equilibrium point of the model. In the same year, Gnanasekaran et al. [20] studied the following RDPPM with the chemotaxis term
and studied the global existence and boundedness of the classical solution by using certain useful inequalities and a crucial lemma. In 2023, Meng and Feng [21] studied an RDPPM with prey refuge and hunting cooperation and provided some conditions to ensure the non-existence and existence of the non-constant positive equilibrium solution for the model. In 2024, Gnanasekaran et al. [22] researched the global existence and asymptotic behavior of the following RDPPM with the chemotaxis term
and demonstrated the uniqueness and boundedness of the classical solution for the system. Furthermore, the convergence of the solution was established by constructing an appropriate Lyapunov functional. It is worth mentioning that the above models are autonomous RDPPMs. Given that birth rates, death rates, and population interactions are not constant, nonautonomous RDPPMs provide a more accurate simulation of population dynamics in predator–prey systems. However, the methods used in the above literature make it difficult to study nonautonomous RDPPMs. Inspired using the above works, with help of the Lyapunov stability theory and the upper and lower solutions method for PDEs, we recently studied a three-species nonautonomous RDPPMs [23]
and derived some sufficient conditions that ensure the global asymptotic stability of strictly positive SHPS for the model.
On the other hand, the dynamic behavior of the RDPPM usually depends on the system states of past time, which induces time delay in the equations of the system. Using delayed reaction–diffusion equations (DRDEs), many real natural phenomena are described and explained well. In recent years, research on DRDEs has attracted more and more attention from scholars. Early research on DRDEs was mostly included in academic works [24,25]. In recent years, some excellent achievements have been obtained in the study of periodic solutions and equilibrium points to the DRDPPM. For example, in 2016, Li [26] considered a DRDPPM with hyperbolic mortality and analyzed the impact of time delay on the stability of the equilibrium solution for the model. In 2017, Zhang and Li [27] studied a DRDPPM with nonlinear prey harvesting and hyperbolic mortality and obtained the globally stable conditions for the unique constant positive equilibrium of the model. In 2018, Ma et al. [28] studied a DRDPPM with mutual interference among the predators and discussed the spatiotemporal dynamics induced by delay and diffusion in the model. In 2019, Chen et al. [29] studied a ratio-dependent DRDPPM with the Neumann boundary conditions and analyzed the global stability of the SHPS for the model. In 2020, Jiang et al. [30] investigated a DRDPPM with a ratio-dependent function and derived stability criteria for the positive equilibrium of the model. In 2021, Djilali and Bentout [31] researched a DRDPPM with the prey social behavior and predator rivalry
and obtained some criteria to ensure the stability of the nonhomogeneous and homogeneous positive periodic solution for the system. In 2022, Xu et al. [32] analyzed a general DRDPPM with predator maturation delay and gained the globally asymptotic stability of the positive equilibrium solution for the model. In 2023, Yuan and Guo [33] studied a DRDPPM with spatial nonlocality and obtained stability criteria of positive steady-state solutions for the model. In 2024, Ma and Meng [34] studied a DRDPPM with a memory-based delay
and obtained sufficient conditions to ensure the globally asymptotic stability for the positive constant equilibrium solution. It is worth mentioning that the issues studied in the above literature are the stability of constant equilibrium solutions or steady-state solutions of autonomous DRDPPMs. Moreover, the research methods in the previous paper, such as eigenvalues, cannot be used to study nonautonomous DRDPPMs. As far as we know, the results of the stability of periodic solutions to nonautonomous DRDPPMs are rarely published.
Due to the involvement of multiple factors such as time, space, time delay, and diffusion in nonautonomous DRDPPMs, it is more difficult to study the stability of its periodic solution and the persistence of the system. As we already know, the stability of the time-periodic solution for nonautonomous DRDPPMs has not been investigated before. Inspired by the above literature, in this paper, we will study a nonautonomous DRDPPMs (1) and (2). The rest of this paper is organized as follows: The innovations and achievements of this article are presented at the end of the Introduction. In Section 2, we will investigate the existence of the time-periodic solution of the nonautonomous DRDPPM by using the delay differential inequalities and fixed point theory. In Section 3, we will give very simple criteria to ensure the globally asymptotical stability of the time-periodic solution for the model with the help of the upper and lower solution methods and Lyapunov stability theory. In Section 4, we will conduct numerical simulations to validate our theoretical findings. Finally, we will present our conclusions.
Remark 1.
The innovations and accomplishments of this article are outlined as follows: (1) By incorporating time delays and variable coefficients into existing population models, we propose a novel nonautonomous DRDPPM that more accurately captures the interactions among populations; (2) leveraging the upper and lower solution methods, Lyapunov stability theory, and fixed point theory, we have innovatively developed new analytical approaches. These methods have allowed us to derive sufficient conditions for the existence and global stability of the positive time-periodic solution of the new model; (3) the technique of constructing Lyapunov functions for delayed differential equations step by step can be used to investigate the related problems, which will provide an effective method for studying the stability of periodic solutions to delayed PDEs; and (4) compared with the existing results, the stable solution obtained in this article is a time-periodic solution rather than a constant periodic solution or a solution for a steady-state system, which will be more in line with the objective law of seasonal cyclical changes in population density. To our knowledge, this is the first attempt to study a nonautonomous DRDPPM by using the above method.
2. Existence of the Strictly Positive SHPS for the Nonautonomous DRDPPM
Set as the -periodic function in , we denote
Next, we investigate the following functional differential equations (FDEs) corresponding to model (1)
For model (8), set
then we have the following result.
Theorem 1.
Suppose that
Then model (8) is permanent.
Proof.
According to the first equation of model (8), one has
From the Lemma 2.2 in [35], it follows that
Moreover, based on the second equation of model (8), it can be deduced that
By , we have . Thus, by the Lemma 2.2 in [35],
By the third equation of model (8), one has
By , we have . Thus, from the Lemma 2.2 in [33], one has
On the other hand, based on the first equation of model (8),
By , we have . Thus, form Lemma 2.3 in [35],
Similarly, by the second and third equations in model (8), one has
and
From and the Lemma 2.3 in [35], we have
and
By (10)–(15), we see that model (8) is permanent. ☐
Theorem 2.
Suppose that holds. Then there exists a strictly positive spatial homogeneity -periodic solution of (1) and (2).
Proof.
Based on the existence and uniqueness theorem of solutions of FDEs (see Theorem 2.3, [36]), we define a Poincaré mapping in the following form
where is a positive solution of FDEs (8) subject to the IC . We define
then is a convex and compact set. By Theorem 1 and continuity of solution of FDEs (8) with regard to the IC, see (Theorem 4.1, [36]]), is a completely continuous mapping from to . By Lemma 2.4 in [36], (8) has a positive -periodic solution which is the spatial homogeneity -periodic solution for model (1) (see Definition 2.2, [37]). ☐
3. Stability of the Strictly Positive SHPS for the Nonautonomous DRDPPM
In this section, our primary focus is on the nonautonomous DRDPPM, as defined by Equations (1) and (2). Utilizing the method of upper and lower solutions for delayed parabolic PDEs, along with Lyapunov stability theory, we establish sufficient conditions to guarantee the global asymptotic stability of the strictly positive SHPS for (1) and (2).
Theorem 3.
Suppose that and the following assumptions hold.
Then (1) and (2) have a spatial homogeneity strictly positive and globally asymptotical stable -periodic solution , that is, the solution of (1) and (2) with any IC fulfills
Proof.
By Theorem 2, (1) and (2) have a spatial homogeneity strictly positive -periodic solution. We prove the stability of the solution. Let Then Let and be the solutions of (8) subject to initial values and , then there exist upper and lower solutions and of (1) and (2). By Theorem 2.1 in [38], (1) and (2) have a unique solution , which satisfies
If we can prove
then (16) is established. Consequently, to achieve (17), we must demonstrate that the solution of FDEs (8), with any positive initial condition , satisfies
By Theorem 1, we have
where , and are positive numbers.
Let
We denote by the right-side derivative of , then
Let
By (19) and (20),
Let
and
By (21) and (22), we have
Similarly, we define
then we have
Let
By (25) and (26), we have
Let
and
By (27) and (28),
Let one has
Let
By (31) and (32),
Let
and
By (33) and (34),
We define a Lyapunov function as follows
By (24), (30), and (36), we obtain
Integrating from to on both sides of (37), we have
where Therefore, is bounded on , and
By (39), we have
By means of Theorem 1, is uniformity continuous on . With the help of Lemma 8.2 in [39], we can obtain
This concludes the proof of Theorem 3. ☐
Theorem 4.
Suppose that the -periodic model (1) satisfies assumptions , then model (1) is permanent, i.e., the solution of model (1) and (2) with any IC fulfills
Proof.
where and are positive numbers.
By means of Theorem 2, we have
Moreover, from Theorem 3, one has
Therefore, by (42) and (43), there exists a positive real number such that the solution of models (1) and (2) with any IC fulfills
This completes the proof of Theorem 4. ☐
4. Numerical Simulations
In this section, we provide a numerical example to prove the correctness of Theorem 3. For the convenience of calculation and numerical simulation, we chose 2-period functions as the coefficients for the nonautonomous periodic DRDPPM (1) and (2).
Example 1.
Consider the following three-species DRDPPM. Based on the assumptions outlined in Theorem 3, and after performing some calculations, we selected specific values for the parameters as demonstrated in models (44) and (45). It is important to note that these chosen parameter values are not unique.
Take we have
and
Based on the above calculation results, it is easy to see that that model (44) and (45) satisfy the conditions of Theorem 3. From Theorem 3, model (44) and (45) have a strictly positive spatial homogeneity 2-periodic solution , and for any positive initial conditions the solution of model (1) and (2) which satisfies
Utilizing the finite difference method [40] and the MATLAB 7.0 software package, we can derive numerical solutions for model (44) subject to the boundary and initial conditions outlined in (45). These solutions are illustrated in Figure 1, Figure 2 and Figure 3. From Figure 1, Figure 2 and Figure 3, it is evident that models (44) and (45) possess a strictly positive, spatially homogeneous, 2-periodic solution. Specifically, in the context of models (44) and (45), the densities of prey and predators exhibit periodic oscillations with a period of 2 and distribute uniformly in space as time progresses sufficiently. In order to verify that the periodic solution of model (44) and (45) is globally asymptotically stable, we selected different initial values and conducted extensive numerical simulations. The results showed that for any positive initial value, the 2-periodic solution of model (44) and (45) is asymptotically stable. Please refer to Figure 4 for details. In order to verify the existence of a globally asymptotically stable periodic solution for models (44) and (45) with different time delays, we conducted numerical simulations for different time delays and found that models (44) and (45) still possess a strictly positive, spatially homogeneous, 2-periodic solution. Figure 5, Figure 6, Figure 7 and Figure 8 show the results when time delays .
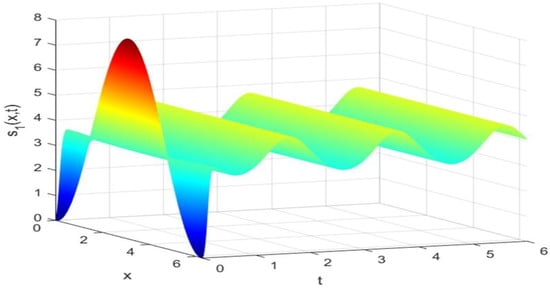
Figure 1.
The evolution process of the density for the species in models (44) and (45) with .
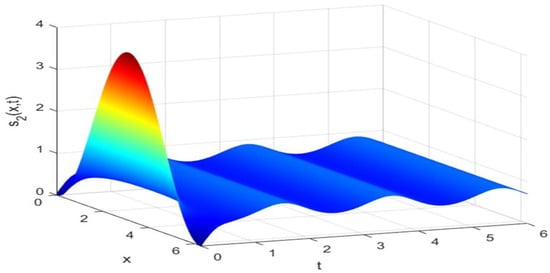
Figure 2.
The evolution process of the density for the species in models (44) and (45) with .
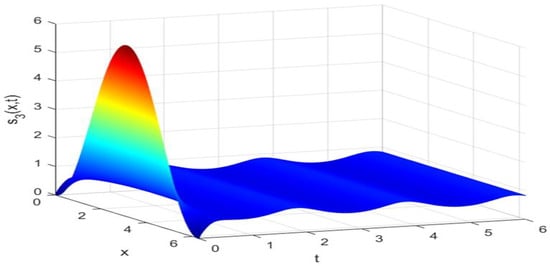
Figure 3.
The evolution process of the density for the species in models (44) and (45) with .
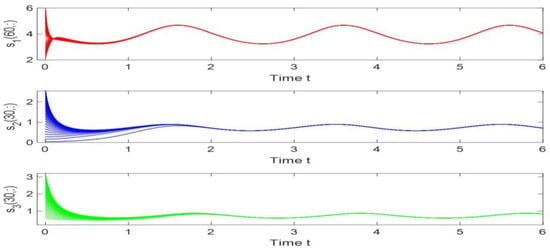
Figure 4.
The evolution process of the density for the species and in models (44) and (45) with different initial values and .
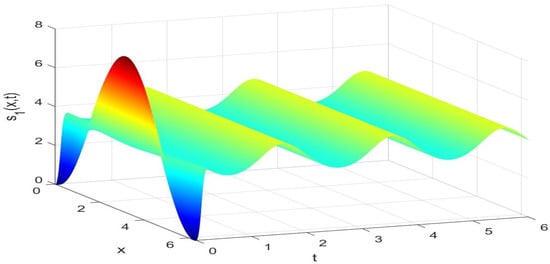
Figure 5.
The evolution process of the density for the species in models (44) and (45) with .
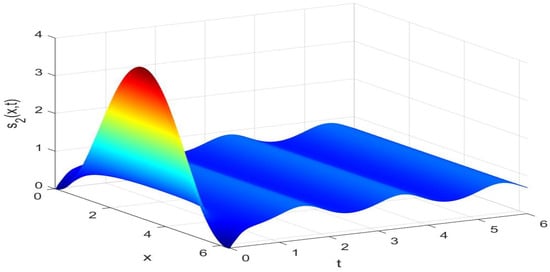
Figure 6.
The evolution process of the density for the species in models (44) and (45) with .
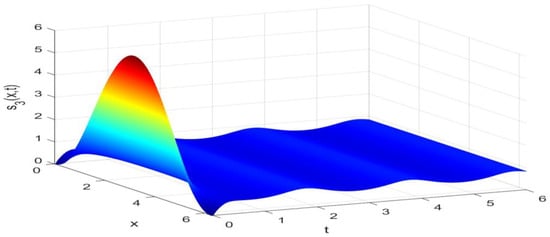
Figure 7.
The evolution process of the density for the species in models (44) and (45) with .
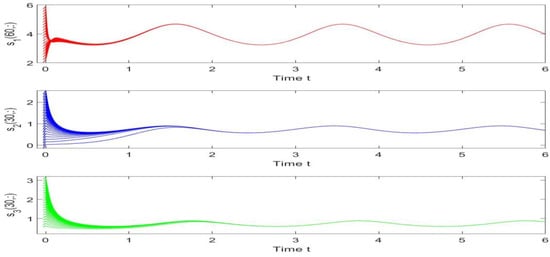
Figure 8.
The evolution process of the density for the species and in models (44) and (45) with different initial values and .
5. Conclusions
This article demonstrates the significant strength of the UALSM in addressing nonlinear nonautonomous reaction–diffusion equations. It has found widespread application in solving problems associated with nonlinear PDEs in various fields such as chemistry, engineering, and mathematical physics. The innovative approach of constructing a Lyapunov function alongside a pair of ordered UALS offers a valuable reference for tackling stability issues in both delay and non-delay nonlinear PDEs.
The periodic solution for a three-species nonautonomous DRDFFM is investigated. The existence and stability of strictly positive SHPS are established for the nonautonomous nonlinear reaction–diffusion equations based on readily verifiable criteria. These criteria improve and generalize certain previous findings. Notably, the sufficient conditions derived in this article are straightforward, rendering the approach highly adaptable for practical applications. It is important to acknowledge that, while this work does not account for functional response in the model, functional response is ubiquitous in ecosystems and can influence system stability. Therefore, our next objective is to explore multi-species non-autonomous DRDPPMs that incorporate functional response. In addition, our method, after being improved, can also be used to study and generalize fractional differential equations [41,42].
Author Contributions
L.J. and C.W. contributed equally to all parts of this article. All authors have read and agreed to the published version of the manuscript.
Funding
This research was funded by the Science Research Fund Project of Yunnan Provincial Department of Education, China (Teacher Category) grant number 2025J1152. And The APC was funded by 2025J1152.
Institutional Review Board Statement
Not applicable.
Data Availability Statement
Data are contained within the article.
Acknowledgments
We sincerely thank the anonymous reviewers and the editor for their valuable comments, which have been instrumental in enhancing the quality of this paper.
Conflicts of Interest
The author declares no conflicts of interest in relation to the publication of this paper.
References
- Zhang, L.; Teng, Z.D. Permanence in a periodic predator-prey system with prey dispersal and predator density-independent. J. Biol. Syst. 2006, 14, 491–507. [Google Scholar] [CrossRef]
- Shi, R.Q.; Chen, L.S. Staged-structured Lotka-Volterra predator-prey models for pest management. Appl. Math. Comput. 2008, 203, 258–265. [Google Scholar] [CrossRef]
- Wang, H.L. Dispersal permanence of periodic predator-prey model with Ivlev-type functional response and impulsive effects. Appl. Math. Model. 2010, 34, 3713–3725. [Google Scholar] [CrossRef]
- Kim, H.K.; Baek, H. The dynamical complexity of a predator-prey system with Hassell- Varley functional response and impulsive effect. Math. Comput. Simul. 2013, 94, 1–14. [Google Scholar] [CrossRef]
- Zhang, L.; Teng, Z.D. The dynamical behavior of a predator-prey system with Gompertz growth function and impulsive dispersal of prey between two patches. Math. Methods Appl. Sci. 2016, 39, 3623–3639. [Google Scholar] [CrossRef]
- Deng, H.; Chen, F.D.; Zhu, Z.L.; Li, Z. Dynamic behaviors of Lotka-Volterra predator-prey model incorporating predator cannibalism. Adv. Differ. Equ. 2019, 2019, 359. [Google Scholar] [CrossRef]
- Zhang, N.; Kao, Y.G.; Chen, F.D.; Xie, B.F.; Li, S.Y. On a predator-prey system interaction under fluctuating water level with nonselective harvesting. Open Math. 2020, 18, 458–475. [Google Scholar] [CrossRef]
- Kaushik, R.; Banerjee, S. Predator-prey system: Prey’s counter-attack on juvenile predators shows opposite side of the same ecological coin. Appl. Math. Comput. 2021, 388, 125530. [Google Scholar] [CrossRef]
- He, M.X.; Li, Z. Stability of a fear effect predator-prey model with mutual interference or group defense. J. Biol. Dyn. 2022, 16, 480–498. [Google Scholar] [CrossRef] [PubMed]
- Quan, Q.; Dai, X.J.; Jiao, J.J. Dynamics of a predator-prey model with impulsive diffusion and transient/nontransient impulsive harvesting. Mathematics 2023, 11, 3254. [Google Scholar] [CrossRef]
- Mishra, P.; Ponosov, A.; WyllerM, J. On the dynamics of predator-prey models with role reversal. Phys. D Nonlinear Phenom. 2024, 461, 134100. [Google Scholar] [CrossRef]
- Britton, N.F. Reaction-Diffusion Equations and Their Applications to Biology; Academic Press: New York, NY, USA, 1986. [Google Scholar]
- Muller, J.; Kuttler, C. Methods and Models in Mathematical Biology: Deterministic and Stochastic Approaches; Springer: New York, NY, USA, 2015. [Google Scholar]
- Ko, W.; Ahn, I. A diffusive one-prey and two-competing-predator system with a atio- dependent functional response: II stationary pattern formation. J. Math. Anal. Appl. 2013, 397, 29–45. [Google Scholar] [CrossRef]
- Moussaoui, A. A reaction-diffusion equations modelling the effect of fluctuating water levels on prey-predator interactions. Appl. Math. Comput. 2015, 268, 1110–1121. [Google Scholar] [CrossRef]
- Wang, K.; Wang, Q.; Yu, F. Stationary and time-periodic patterns of two predator and one prey systems with prey-taxis. Discret. Contin. Dyn. Syst. 2017, 37, 505–543. [Google Scholar] [CrossRef]
- Wu, D.Y.; Zhao, H.Y. Spatiotemporal dynamics of a diffusive predator-prey system with allee effect and threshold hunting. J. Nonlinear Sci. 2020, 30, 1015–1054. [Google Scholar] [CrossRef]
- Montano, M.C.; Lisena, B. A diffusive two predators-one prey model on periodically evolving domains. Math. Methods Appl. Sci. 2021, 44, 8940–8962. [Google Scholar] [CrossRef]
- Yan, X.P.; Zhang, C.H. Spatiotemporal dynamics in a diffusive predator-prey system with Beddington-DeAngelis functional response. Qual. Theory Dyn. Syst. 2022, 21, 166. [Google Scholar] [CrossRef]
- Gnanasekaran, S.; Gurusamy, A.; André, H.E.; Nithyadevi, N. Global existence of solutions to a two-species predator-prey parabolic chemotaxis system. Int. J. Bioma Themat. 2022, 15, 2250054. [Google Scholar]
- Meng, X.Y.; Feng, Y. Dynamical behaviour of an intraguild predator-prey model with prey refuge and hunting cooperation. J. Biol. Dyn. 2023, 17, 2222142. [Google Scholar] [CrossRef]
- Gnanasekaran, S.; Nithyadevi, N.; Udhayashankar, C. Global existence and asymptotic behavior of a predator-prey chemotaxis system with inter-species interaction coefficients. J. Differ. Equ. 2024, 378, 264–302. [Google Scholar] [CrossRef]
- Jia, L.L.; Huang, J.; Wang, C.Y. Global stability of periodic solution for a 3-species nonautonomous ratio-dependent diffusive predator-prey system. J. Appl. Anal. Comput. 2024, 14, 2392–2410. [Google Scholar] [CrossRef] [PubMed]
- Wu, J. Theory and Applications of Partial Functional Differential Equations; Springer: New York, NY, USA, 1996. [Google Scholar]
- Wang, C.Y.; Yang, Z.G. Method of Upper and Lower Solutions for Reaction Diffusion Systems with Delay; Science Press: Beijing, China, 2013. (In Chinese) [Google Scholar]
- Li, Y. Dynamics of a delayed diffusive predator-prey model with hyperbolic mortality. Nonlinear Dyn. 2016, 85, 2425–2436. [Google Scholar] [CrossRef]
- Zhang, F.R.; Li, Y. Stability and Hopf bifurcation of a delayed-diffusive predator-prey model with hyperbolic mortality and nonlinear prey harvesting. Nonlinear Dyn. 2017, 88, 1397–1442. [Google Scholar] [CrossRef]
- Ma, Z.P.; Liu, J.; Yue, J.L. Spatiotemporal dynamics induced by delay and diffusion in a predator-prey model with mutual interference among the predator. Comput. Math. Appl. 2018, 75, 3488–3507. [Google Scholar] [CrossRef]
- Chen, M.X.; Wu, R.C.; Liu, B.; Chen, L.P. Spatiotemporal dynamics in a ratio-dependent predator-prey model with time delay near the Turing-Hopf bifurcation point. Commun. Nonlinear Sci. Numer. Simul. 2019, 77, 141–167. [Google Scholar] [CrossRef]
- Jiang, X.; Zhang, R.; She, Z.K. Dynamics of a diffusive predator-prey system with ratio- dependent functional response and time delay. Int. J. Biomath. 2020, 13, 2050036. [Google Scholar] [CrossRef]
- Djilali, S.; Bentout, S. Pattern formations of a delayed diffusive predator-prey model with predator harvesting and prey social behavior. Math. Methods Appl. Sci. 2021, 44, 9128–9142. [Google Scholar] [CrossRef]
- Xu, W.X.; Shu, H.Y.; Tang, Z.; Wang, H. Complex dynamics in a general diffusive predator- prey model with predator maturation delay. J. Dyn. Differ. Equ. 2022, 36, 1879–1904. [Google Scholar] [CrossRef]
- Yuan, Y.D.; Guo, Z.M. Global dynamics of a class of delayed differential systems with spatial non-locality. J. Differ. Equ. 2023, 349, 176–235. [Google Scholar] [CrossRef]
- Ma, T.T.; Meng, X.Z. Global stability analysis and Hopf bifurcation due to memory delay in a novel memory-based diffusion three-species food chain system with weak Allee effect. Math. Methods Appl. Sci. 2024, 47, 6079–6096. [Google Scholar] [CrossRef]
- Nakata, Y.; Muroya, Y. Permanence for nonautonomous Lotka-Volterra cooperative systems with delays. Nonlinear Anal. Real World Appl. 2010, 11, 528–534. [Google Scholar] [CrossRef]
- Jack, K.H. Theory of Functional Differential Equations; Springer: New York, NY, USA, 1977. [Google Scholar]
- Zhang, Y.J.; Wang, C.Y. Stability analysis of n-species Lotka-Volterra almost periodic competition models with grazing rates and diffusion. Int. J. Biomath. 2014, 7, 1450011. [Google Scholar] [CrossRef]
- Wang, C.Y. Existence and stability of periodic solutions for parabolic systems with time delays. J. Math. Anal. Appl. 2008, 339, 1354–1361. [Google Scholar] [CrossRef][Green Version]
- Khalil, H.H. Nonlinear Systems, 3rd ed.; Prentice Hall: Englewood Cliffs, NJ, USA, 2002. [Google Scholar]
- Larsson, S.; Thomée, V. Partial Differential Equations with Numerical Methods (Texts in Applied Mathematics); Springer: New York, NY, USA, 2015. [Google Scholar]
- Amilo, D.; Izuchukwu, C.; Sadri, K.; Yao, H.R.; Hincal, E.; Shehu, Y. A fractional-order model for optimizing combination therapy in heterogeneous lung cancer: Integrating immunotherapy and targeted therapy to minimize side effects. Sci. Rep. 2024, 14, 18484. [Google Scholar] [CrossRef] [PubMed]
- Amilo, D.; Sadri, K.; Kaymakamzade, B.; Hincal, E. A mathematical model with fractional- order dynamics for the combined treatment of metastatic colorectal cancer. Commun. Nonlinear Sci. Numer. Simul. 2024, 130, 107756. [Google Scholar] [CrossRef]








Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).