Abstract
In this article, a distributed charging strategy problem for plug-in electric vehicles (PEVs) with feeder constraints based on generalized Nash equilibria (GNE) in a novel smart charging station (SCS) is investigated. The purpose is to coordinate the charging strategies of all PEVs in SCS to minimize the energy cost of SCS. Therefore, we build a non-cooperative game framework and propose a new price-driven charging control game by considering the overload constraint of the assigned feeder, where each PEV minimizes the fees it pays to satisfy its optimal charging strategy. On this basis, the existence of GNE is given. Furthermore, we employ a distributed algorithm based on forward–backward operator splitting methods to find the GNE. The effectiveness of the employed algorithm is verified by the final simulation results.
Keywords:
plug-in electric vehicle (PEV); generalized Nash equilibria (GNE); feeder constraint; non-cooperative game; charging strategy MSC:
9110
1. Introduction
1.1. Background and Research Gaps
In recent years, “carbon neutrality” has become the focus of green energy development. How to achieve the goal of mitigating climate change without seriously affecting economic growth is an important issue that all countries will pay attention to in the future [1]. The development and promotion of new energy electric vehicles (EVs) are an important link to promote the development of energy transformation. From a report released by the International Energy Agency, the global EV inventory will increase by every year and will reach 245 million vehicles by 2030. As a new generation of transportation systems, PEVs have become a popular solution in recent years to reduce greenhouse gas emissions from gasoline-powered vehicles [2].
However, with the large-scale connection of PEVs to the power grid, the charging load randomly forms an impact load, which has an adverse impact on the safe and stable operation of the power grid. It often results in the negative impact of “peak-to-peak”, further increasing the demand for traditional fossil energy, but reducing the environmental protection advantages of PEVs [3]. Therefore, in order to cope with the increasingly prominent problem of charging coordination of PEVs in the power grid, questions of how to meet the charging needs of all PEVs, reduce the energy cost of the power grid, avoid energy waste, battery overload, power grid collapse and other problems [4,5], and achieve the security and stable development of the power grid have become the research focus of domestic and foreign scholars.
Since the batteries of PEVs can reserve electric energy, the PEVs have a greater abilities in charging and discharging. For example, during periods of peak electricity consumption, some PEVs could in turn play the role of energy suppliers rather than consumers. Lately, researches on PEV charging coordination in smart grids have focused on PEVs themselves or groups, such as one-way/two-way vehicle-to-grid (V2G) [6], vehicle-to-home (V2H) [7], vehicle-to-building (V2B) [8] and vehicle-to-vehicle (V2V) [9] mechanisms. Generally speaking, the most common interaction of PEVs is through SCS, which can coordinate and guide the charging and discharging of PEVs to reduce the influence of overcharging [10].
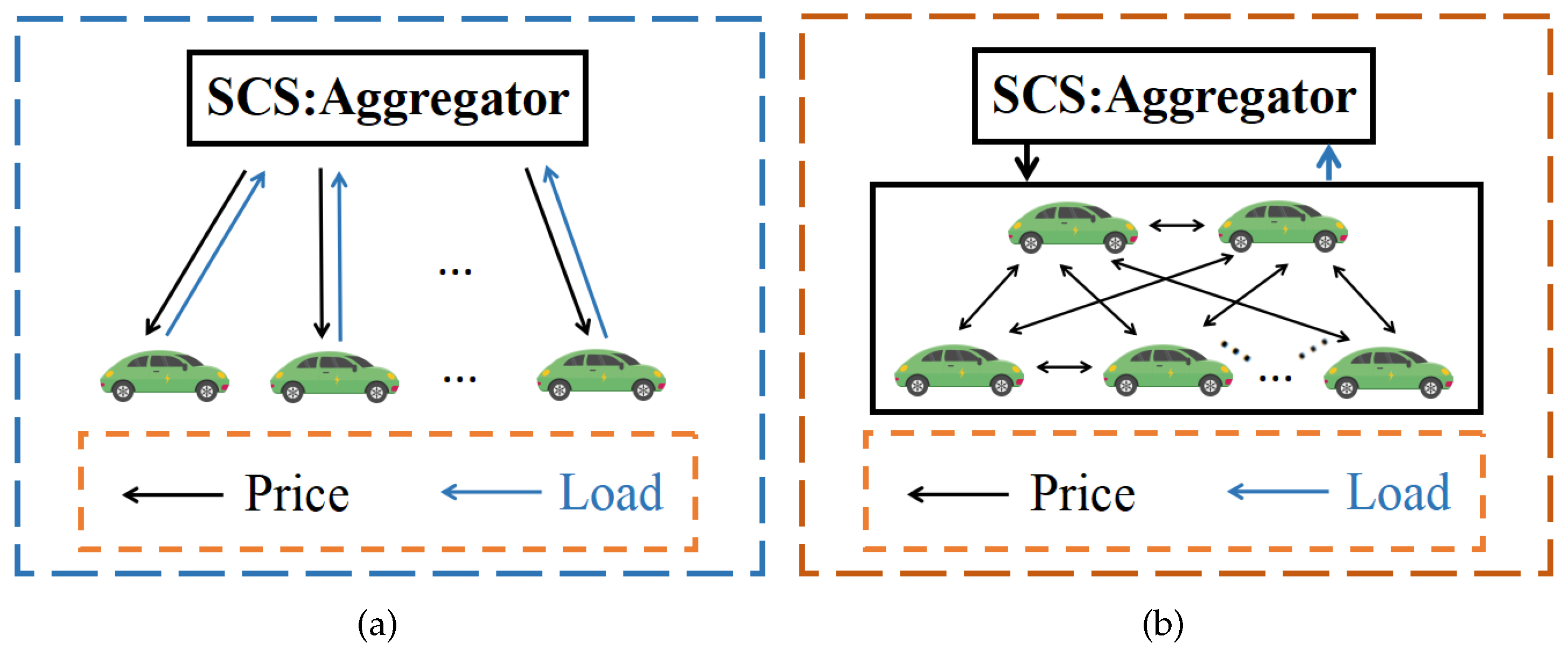
Next, as shown in Figure 1, two different interaction modes between SCS and PEVs are shown. Figure 1a shows the traditional interaction mode; that is, each PEV communicates with the aggregator embedded in the SCS. Specifically, in response to time-varying price, each PEV individually increases/decreases its charging request or switches from a high price period to a low price period charging request. However, this traditional interaction mode is limited by the independent property of PEVs, and it is likely that the optimal charging strategy cannot be found to make the cost of SCS minimum. Unlike V2G, which refers to a mechanism that allows bidirectional power transmission between PEVs and the grid, V2V refers to the mechanism that allows direct communication between vehicles in the same area without the need to pass through the grid. The concept of V2V produces a mobile charger, which allows electric vehicles to charge the batteries of PEVs when access to the grid is limited. Thus, the work [11] proposes a new interaction mode combined with a V2V mechanism, as shown in Figure 1b. This mechanism first coordinates the charging strategy of all PEVs according to the time-varying price determined by the aggregator, and then transfers the aggregated load information to the aggregator of the SCS.
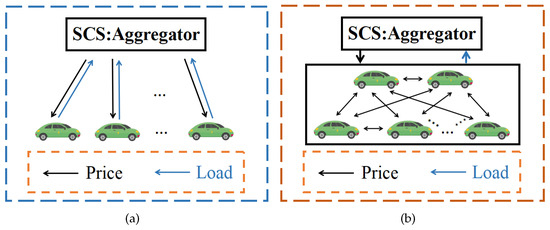
Figure 1.
(a) Traditional interaction mode. (b) New interaction mode.
Recently, more and more research papers on the charging of EVs are being published. A charging strategy for V2G-capable PEVs is proposed in [12,13], and the effect of different penetration levels on the voltage stability and power loss of the distribution network is investigated. And, the work [12] improves the accuracy and computational efficiency of the model by exploring the additional constraint sum of capacitated flow refueling location model based on subpaths. In addition, some other works, such as [14,15], mainly focus on adopting V2G technology to optimize the charging and discharging mode. Among them, the work [14] ranks the candidate lines as an operational strategy to minimize the total operating cost. In [16], considering the constraints of the transportation network and the power grid, the authors obtain a fast charging scheme with two objectives of total charging time and cost. Furthermore, considering the practical application of the community, a fairness strategy is designed in [17] to share the battery of PEV with neighbors. And in [18], a distributed control method with a consensus algorithm is proposed to handle large-scale PEV charging coordination based on grid side preference.
1.2. Motivation
However, most of the above works fail to take into account the interactions between players in SCS. Therefore, we will use game theory [19] to discuss the interactions between players. In the last several years, many works have been completed on the charging problem under different conditions based on game theory. Meanwhile, with the in-depth study of the distributed optimization, distributed optimization is also gradually applied to game theory. Distributed optimization is a task of effectively realizing optimization through cooperative coordination between multiple agents, and can be used to solve large-scale complex optimization problems that many centralized algorithms cannot. A mechanism by which the grid determines the price to increase profitability is established in [20] and the PEV groups select a charging strategy to optimize the trade-off between personal charging income and related costs. In [21], the non-cooperative game model based on price-incentivization is adopted to generate equilibria solutions for energy reserve systems. Furthermore, the work [22] proposes a distributed charging method based on a non-cooperative game with distribution network security constraints, which can adequately solve the network failure problem caused by spatial and temporal security constraints. And for PEV-based taxis, the work [23] introduces a random game to research a charging strategy based on a data-driven approach. Moreover, the authors in [24] also propose a charging management method with EV social contribution behavior. Nevertheless, the above studies rarely consider the potential interactions between PEVs, which is not conducive to the rational allocation of power resources and minimizing the cost.
At the same time, the existing research on PEVs charging mostly focuses on minimizing the total charging cost of all PEVs. In work [25], the authors decompose the random network security bidding problem into bidding and network sub-problems by using the alternating direction method of multipliers (ADMM), and solve them in parallel, respectively. This maintains data privacy, and uses the non-convex bifurcation formula to simulate the constraint of the distribution network. The constraint condition is the power flow constraints, which is a direction that can be considered for application in the field of PEVs charging. Whereas, some other works emphasize that the transformer/feeder overload constraints must be considered when coordinating the PEV charging behavior [26,27], otherwise the feeder overload may cause the entire grid to collapse. Among them, the work [26] proposes a feeder overload control model based on the topology of the distribution network. However, the subgradient-based method proposed by it needs a time-consuming iterative procedure to converge, which is impractical in practice. Another work [27] employs a distributed charging control method to seek the proportional and fair rate allocation for each PEV. But the total load of each PEV charge is not considered, and the optimization is performed for only one time period.
1.3. Contributions
Based on the motivation discussed above, this article investigates a charging coordination problem of PEVs considering feeder constraints and a new interaction mode. In this problem, the player’s decisions are influenced not only by local constraints but also by coupling constraints, so the optimal strategy for all players is called a generalized Nash equilibrium (GNE) [28,29]. The main contributions are as follows:
- (1)
- To take into account the flexible property of PEVs to a greater extent; unlike the interactions considered by the V2G mechanism [20], we employ a novel interaction mechanism between PEVs and SCS, which integrates the V2V mechanism to allow the interaction between PEVs. At the same time, in order to reduce the duration of the total SCS load peak and minimize the cost to the PEV owner, we develop a non-cooperative game framework that considers distribution feeder overload constraints and propose a novel price-driven charging control game that considers both minimizing charging costs and reducing feeder overload and avoids grid collapse.
- (2)
- To solve the generalized Nash equilibria problem (GNEP) considered in this article, we employ a distributed algorithm based on forward–backward operator splitting methods [30,31,32]. Using this algorithm, we can simultaneously treat the inequality constraints and the equality constraints in GNEP. We put together the constraints of all PEVs in GNEP from a global perspective, putting the local constraints into the global coupling constraints, and then treating the inequality constraints in GNEP together. Simulation results verify the effectiveness of the algorithm.
This article is organized as follows: the system model and problem formulation are presented in Section 2. Section 3 provides the framework of the non-cooperative game. The distributed algorithm based on forward–backward operator splitting methods is established in Section 4. The experimental results are reported and discussed in Section 5. Section 6 is the conclusion of this article and some ideas for future.
2. System Model and Problem Formulation
In this section, we assume an SCS, which is situated in a residential/commercial area. The owners of PEVs in this residential/commercial area will typically go to the SCS closest to them to charge their vehicles. This SCS needs to meet all the charging needs of PEVs as much as possible, while reducing the energy cost of the grid and avoiding energy waste to achieve greater profit, while coordinating and guiding the charge and discharge of PEVs to reduce the impact of overcharge. The PEVs in SCS has a more flexible charging and discharging capacity, and during peak electricity consumption periods, some PEVs may in turn act as energy suppliers, and the PEVs can interact to minimize the charging cost of the PEVs.
Then let a finite set represent the set of PEVs that need to be charged in the SCS, a finite set represent the set of charging time periods, and a finite set represent the set of distribution feeders. And the vector represents the charging curve of PEV n in the SCS at the charging horizon (where represents the charging power of PEV n at time t [11]). Let represent the charging curve of all PEVs in the SCS.
2.1. System Model
(1) Viable Charging Configuration Set: At the end of charging, the total energy of PEV n shall reach the energy required for the terminal level:
where represents the energy required for PEV n, represents the initial energy level of PEV n (i.e., the energy value when PEV n reaches the SCS), and represents the terminal energy level of PEV n (i.e., the charging target value when PEV n leaves the SCS).
Then, the energy level of PEV n shall not exceed its battery capacity at time t:
where represents the energy level of PEV n at time t, indicates the lower battery capacity limit of PEV n, then indicates the upper battery capacity limit of PEV n.
In addition, the charging power of PEV n shall not exceed its rated power:
where indicates the rated discharging power of PEV n, then indicates the rated charging power of PEV n.
Moreover, considering the feeder overload constraints, for feeder l, we have
and we regard the radial power distribution electric network as a tree, with the distribution substation as its root. Each PEV is connected to a leaf node of the tree. Let represent the set of distribution feeders that transfer power from the distribution substation to PEV n. Then in (6) and (7), represents the set of PEVs using the distribution feeder l to carry the power, represents the total load of PEVs through feeder l at time t, and represents the basic demand load (non-PEV demand) transmitted through feeder l at time t. As feeder l has a maximum loading capacity , the maximum PEV demand it can support at time t is . Here, represents the overload control threshold on feeder l at time t, which satisfies the condition .
In summary, for PEV n, the feasible charging configuration set is as follows:
Accordingly, is the set of feasible charging configurations for all PEVs in the SCS.
(2) PEV User Cost Model: The charging unit price cost of PEVs at time t is expressed by the following linear price function:
where represents the positive price coefficient related to the time-of-use electricity price and represents the positive price coefficient related to the basic price of the SCS. Here, represents the aggregate load of the SCS at time t. Note that is affected by the basic demand load transmitted through feeder 1 at time t due to the consideration of feeder constraints, i.e., .
(3) SCS Cost Model: According to cost price , we define as the energy cost of the SCS at time t. Then the model is shown in the following function:
The total cost of the SCS during the whole charging time can be expressed as
Then, we use to represent the fees paid by PEV n. Note that under normal commercial profitability, it should be ensured that the total cost of all PEVs should not be less than the total cost of the SCS, namely: . Next, we define to represent the profitability index, if , the SCS revenue and expenditure balance; if , the SCS is profitable. Then, we assume an ideal state, i.e.,
Considering all PEVs, summing both sides of (12), we have
Combined with the definition of and (13), we have
where with as the proportion of the total energy consumption of PEV n in the aggregate load of the SCS.
2.2. Problem Formulation
To sum up, this problem can be expressed as follows:
That is, the problem is to minimize the total cost of the SCS under the conditions corresponding to (15b).
3. Non-Cooperative PEV Charging Game
We build a non-cooperative game framework for charging with PEVs and discuss the existence of GNE in this section. Different from cooperative games, the behaviors and decisions of players in a non-cooperative game are independent of each other [33].
3.1. Game Model
Here, a non-cooperative PEV charging game is established, where the components are expressed as
Players: The PEVs in set ;
Policy set: for , is nonempty, compact, and convex;
Cost function:
where represents the strategies of all players except player n.
3.2. Existence of GNE
Then, here is a lemma proving the existence of a GNE for the game G.
4. Distributed Algorithm
In this section, we employ a distributed algorithm based on forward-backward operator splitting methods. The algorithm is characterized by the fact that each player only needs to know its local objective function, locally feasible set and a local block of affine constraints, and there is no centralized coordinator to update and broadcast dual variables. Each player needs to observe the decisions that directly affect his local objective function and share information related to the multiplier with his neighbors [30]. We assume that each player n only knows their own local data, i.e., , , , and . Player n has a local first-order oracle of , which returns given .
4.1. Target Question
The objective function (14) of the model that we need to solve can be rewritten as follows:
where , , and represents the one vector of T dimension.
4.2. Constraint Handling
Assuming that there are L feeders, represents the set of vehicles powered by the feeder, and the power supply constraint on the feeder can be expressed as
where and Here, represents the identity matrix of T dimension and represents the zero matrix of T dimension.
Defining a matrix and , the constraints of all feeders can be expressed as
For distributed solution, the matrix K can be split into N matrices by column , . Then can be equivalently expressed as
where and Here, represents the zero vector of T dimension. And represents the number of elements in ; that is, the number of vehicles powered by the feeder.
For example, if there are four feeders and the connection method is shown in Figure 2, then
therefore, we can get .

Figure 2.
Example of feeders link mode.
Next, the pseudo gradient can be expressed as
Then we define a column vector .
4.3. Element Derivation
The classical forward–backward algorithm is known to solve game problems of the following form:
The constraints of problem (23) are different from (25). Thus, consider writing all the constraints of PEV n in (23) together from a global perspective to get . Then divide the matrix A and vector b into multiple sub-matrices and sub-vectors , and obtain the equivalent form of as (25b).
Write all the constraints that need to be satisfied in the form of matrix and vector multiplication. For the global, the following must be satisfied:
where and represent the inequality constraint factors of PEVs, and represent the equality constraint factors of PEVs.
Letting denote column n of W and denote column n of H, we have
where consists of local information known to PEV n. Thus, the constraint can be satisfied as shown in (27), then the constraints of problem (23) are satisfied. Note that since (27b) is an equality constraint, there is only an inequality constraint (25b) in problem (25), so considering the processing of the inequality constraint (25b), the dual variable needs to be projected to a non-negative set. According to the Lagrange multiplier method, if the equality constraints are dealt with, the corresponding dual variables do not need to be projected.
Let dual variable correspond to inequality constraint and the dual variable correspond to equality constraint . The dual variable needs to be non-negative. Then let
After that, we only need to project some of the dimensions of ’s corresponding inequality constraints onto the non-negative set. Then we can handle both inequality constraints and equality constraints at the same time.
Next, considering the constraint condition , at this time, it is only necessary to let
and the projection function can be realized.
Next, we further define the set in problem (25) as follows:
4.4. Distributed Algorithm
In this algorithm, agent n controls its local decision , local copy of multiplier , and has a local assistant variable . Furthermore, M represents the dimension of the local data, i.e., . Note that because is an equality constraint, when is updated, only the last N dimensions do not need to be projected. The remaining dimensions must be non-negative; that is, the dimension of the corresponding inequality constraint part in this set needs to be projected to non-negative, and the dimension corresponding to the equality constraint part does not need to be projected.
Algorithm 1 is shown below, where , , and denote , , and at iteration k, , and are fixed constant step-sizes of player n, represents the set of neighbors of the agent n, and if , then , otherwise .
| Algorithm 1 Distributed Algorithm Based on Forward-Backward Operator Splitting Methods |
|
5. Simulation Results
We demonstrate the function of the employed distributed algorithm through the simulation results in this section. For illustration purpose, we consider the SCS with ten PEVs in a residential area [22].
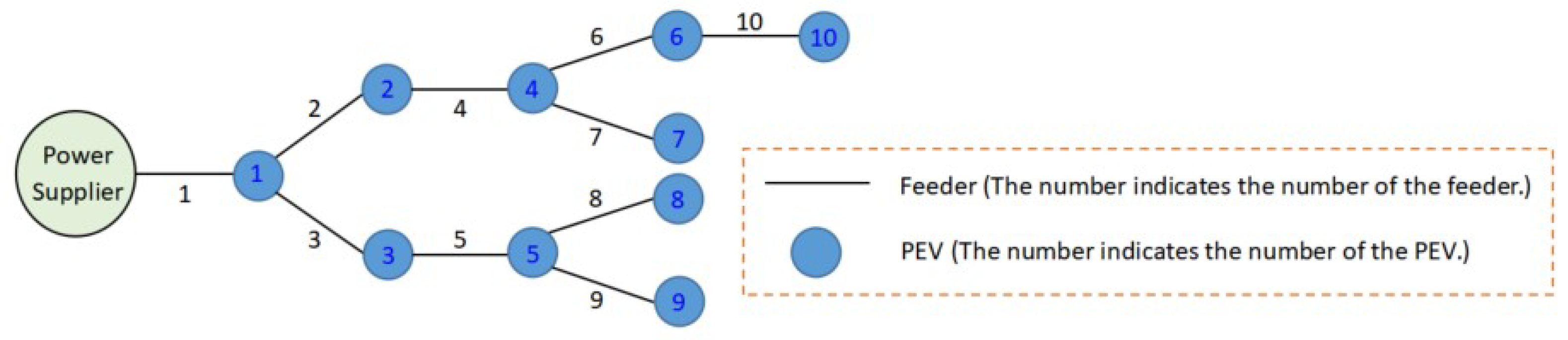
In this case, ten PEVs perform charging and discharging interactions in the SCS. The feeder constraints for these ten different PEVs in the SCS are considered in the manner of Figure 3. Table 1 lists the parameters, arrival time (AT), and departure time (DT) for the PEVs. Table 2 lists the corresponding numbers of the cars affected by each feeder. Table 3 lists the supplier of the maximum supply on the feeder l at time t. Table 4 lists the base power consumption (non-PEV demand) on the feeder l at time t.
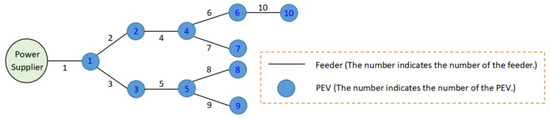
Figure 3.
Feeders and PEVs connection mode.

Table 1.
Parameter Settings of PEVs.
Table 2.
The PEVs Affected by the Feeder.
Table 3.
Maximum Power Supply.
Table 4.
Basic Power Consumption (Non-PEV Demand).
The price coefficient is /kWh (i.e., from 7:00 to 17:00), /kWh (i.e., from 18:00 to 6:00 the next day), and /kWh. Furthermore, the overload control threshold is (i.e., from 7:00 to 17:00) and (i.e., from 18:00 to 6:00 the next day). In addition, here, .
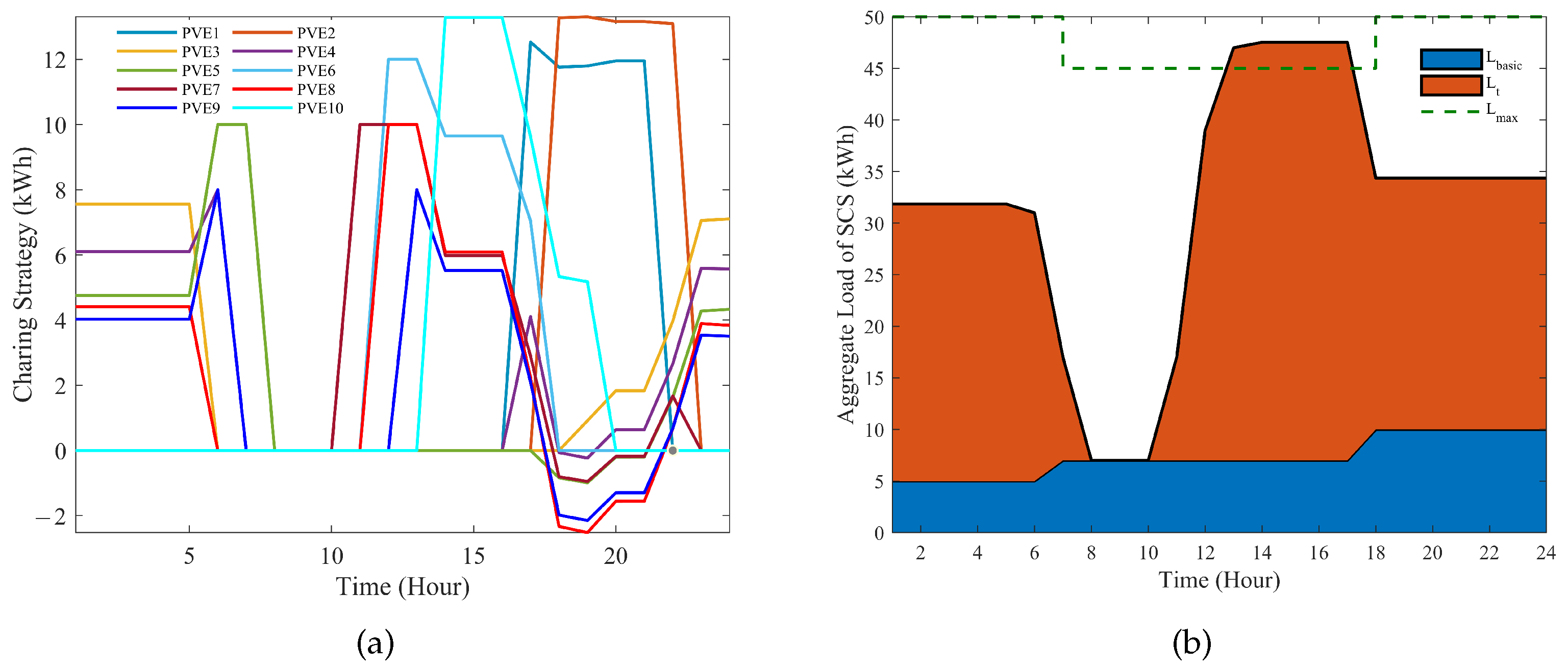
Then, the charging strategy without feeder constraints is shown in Figure 4a. From Figure 4b, it can be seen that the demand peak occurs from 13:00 to 17:00, and during this period, the SCS is in an overload state. In addition, the total energy cost of the SCS is . Then, we employ the distributed algorithm based on forward–backward operator splitting methods to coordinate PEVs for charging, where the fixed constant step-sizes are , , and , and the convergence analysis of the algorithm is shown in [30] (Theorem 3); therefore, the results are shown below.
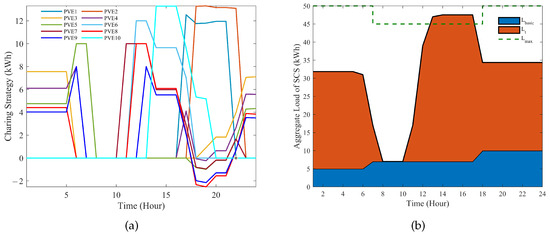
Figure 4.
(a) Charging strategies without feeder constraints. (b) Aggregate load of the SCS without feeder constraints.
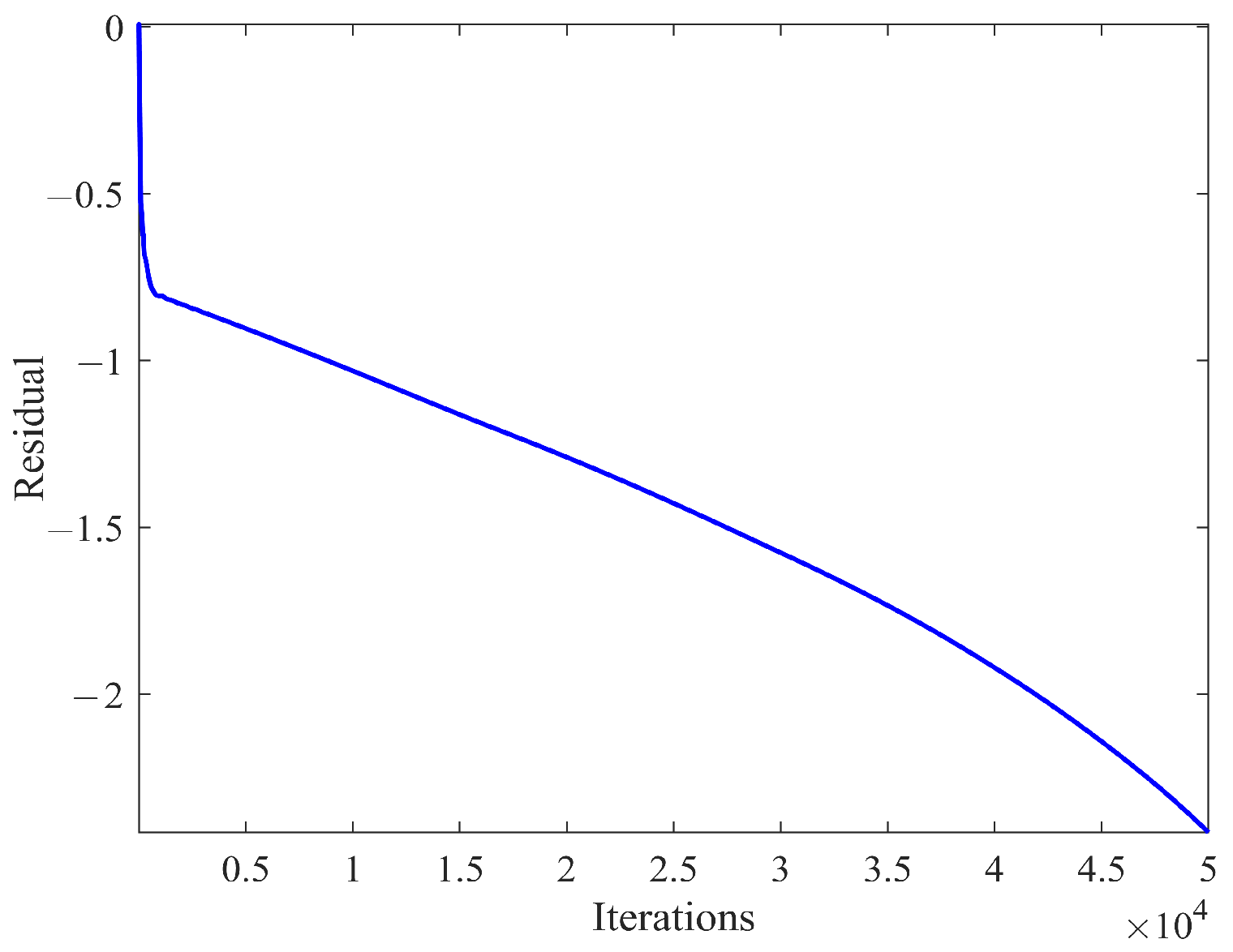
(1) Convergence Accuracy: The calculation results are shown in Figure 5. We can observe that the distributed algorithm has a convergence accuracy of at the 50,000th iteration.
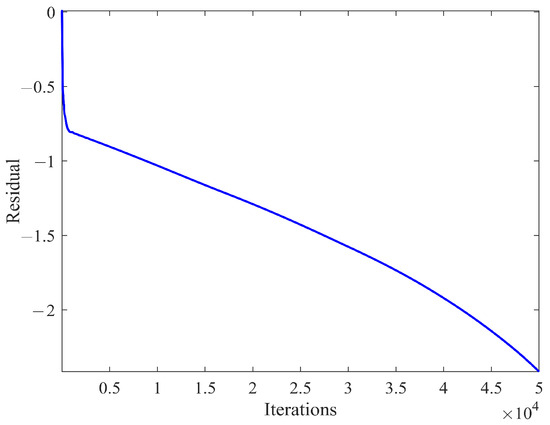
Figure 5.
Convergence accuracy.
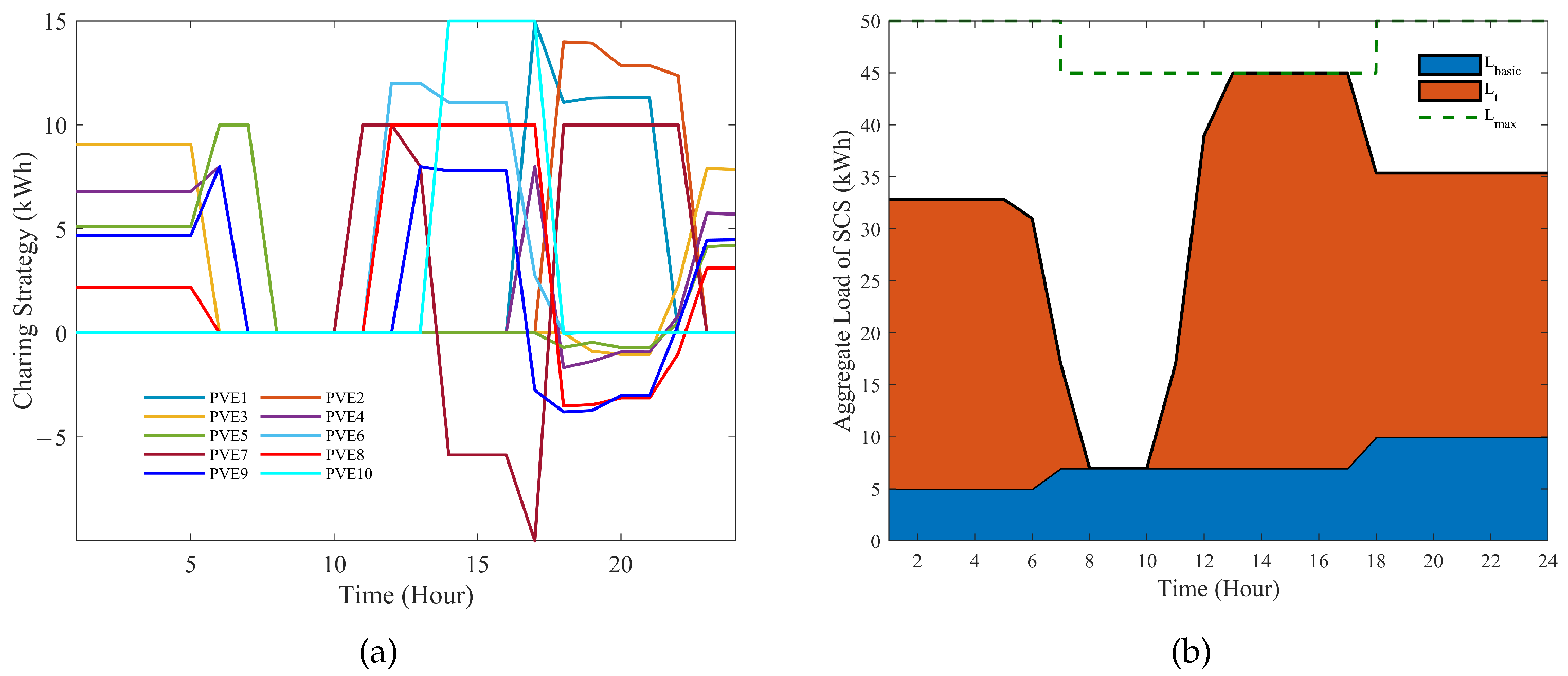
(2) Coordinate Charging Results: As shown in Figure 6, we further provide a charging strategy and total load considering feeder constraints.
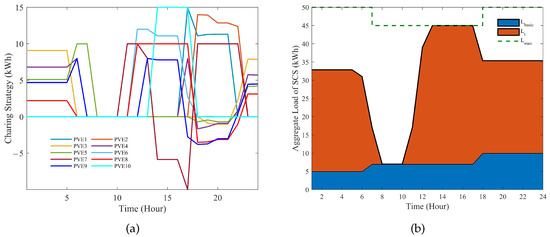
Figure 6.
(a) Charging strategies with feeder constraints. (b) Aggregate load of the SCS with feeder constraints.
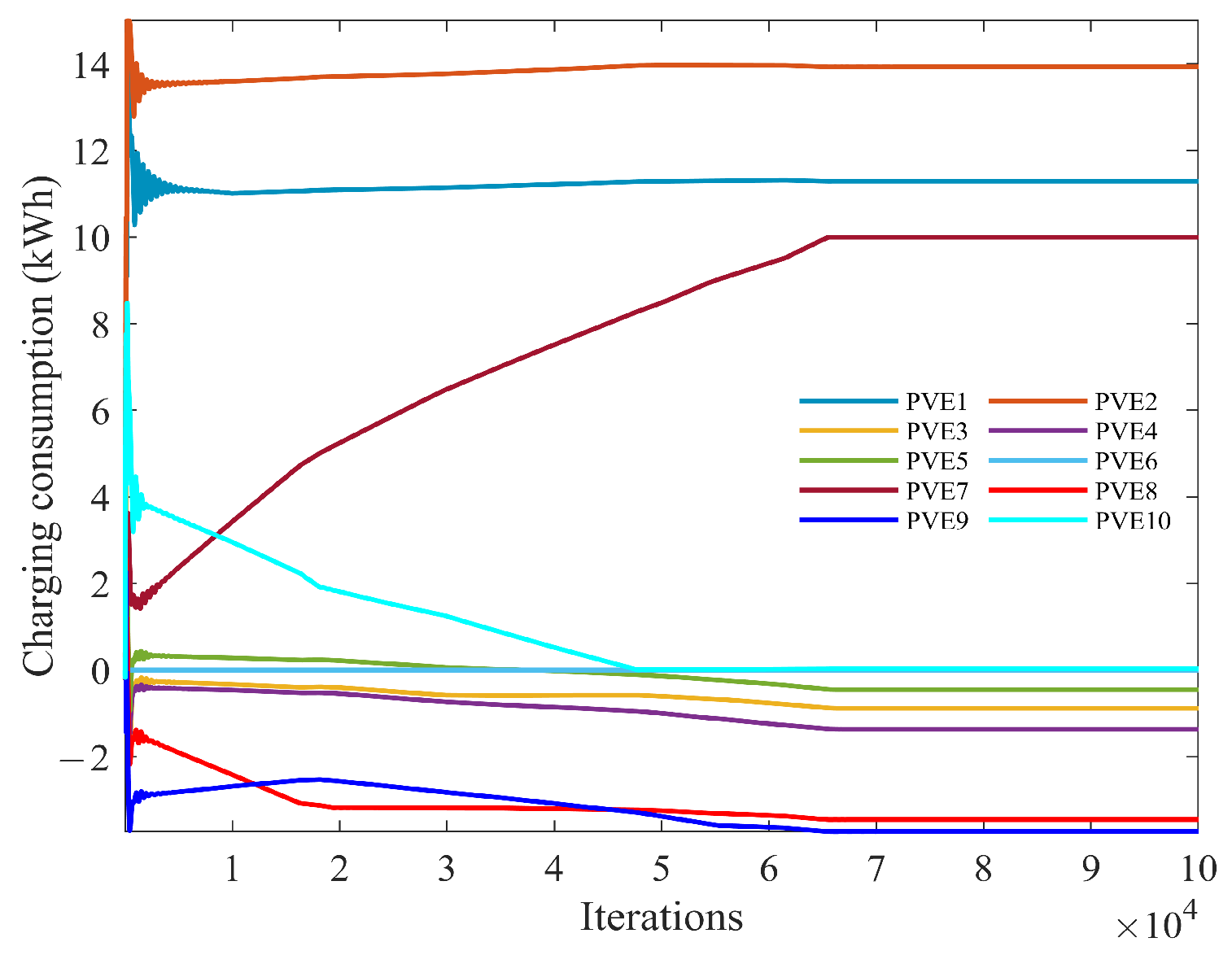
As can be seen in Figure 6a, five PEVs emit more electricity. Therefore, the aggregate load at this time does not make the SCS in an overload state, as shown in Figure 6b. In addition, from the calculation result and Figure 6b, we can further get that although the total energy cost of the SCS rises to , the peak of demand is no longer overloaded, which greatly reduces the load on the line and saves energy. Furthermore, we provide an iterative process by ten PEVs in a time interval (i.e., 19:00), as shown in Figure 7, to further verify the effectiveness of the employed algorithm.
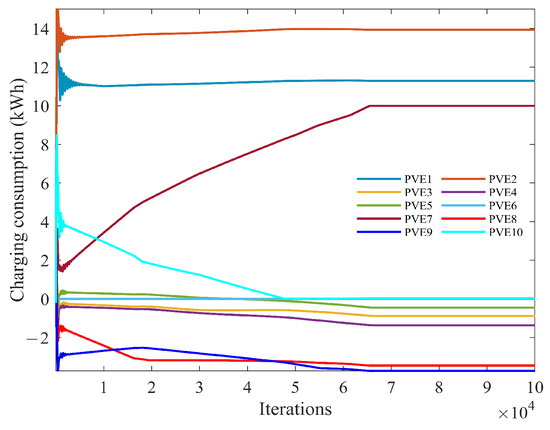
Figure 7.
Charging curves of ten PEVs at 19:00.
It is intuitively clear that each PEV converges to its own optimal charging strategy. Therefore, in the non-cooperative framework considering feeder constraints, the distributed algorithm employed in this article can solve the charging problem in the SCS effectively.
6. Conclusions
This article considered the charging problem based on feeder constraints and the interaction between PEVs in the SCS, and studied it by using the method of the non-cooperative game. A distributed algorithm based on forward–backward operator splitting methods was employed to solve the GNE in the framework of the non-cooperative game, and the algorithm was proved to be effective by the simulation results. That is, the distributed algorithm adopted in this article can effectively solve the charging problem in the power grid in a non-cooperative framework considering the feeder constraints. It should be noted that the fees paid by PEVs are greatly affected by the energy cost of the SCS. This article primarily focuses on minimizing the energy cost of the SCS under feeder constraints. Thus, we modelled the cost function as the fees paid by the PEVs’ owners to the SCS. Note that this article did not consider the battery degradation caused by frequent charging/discharging of PEVs, which will increase the possibility of hidden costs [34], so that future work should consider this cost problem and try to compensate the owners of PEVs to eliminate their concerns and encourage them to participate. At the same time, we will continue to focus on improving our work by comparing and analyzing different optimization methods. For example, the hybrid policy-based reinforcement learning (HPRL) adaptive energy management approach [35] can effectively avoid oversimplification of the model and achieve an optimized strategy. Another example is the event-triggered-based distributed algorithm [36], which can solve future and real-time energy management problems in a fully distributed way, with better flexibility, reliability and scalability, and is also conducive to privacy protection.
Author Contributions
J.T.: Data curation, formal analysis, investigation, methodology, resources, software, supervision, writing—original draft. H.L.: data curation, formal analysis, software. M.C.: formal analysis, software, writing—original draft. Y.S.: resources, methodology, software. L.Z.: data curation, supervision, software. H.W.: methodology, software. All authors have read and agreed to the published version of the manuscript.
Funding
The work described in this article is supported by the PhD startup funds for fundamental research funds for the central universities in South-west University under grant no. SWU221009. The authors gratefully acknowledge their technical and financial support.
Data Availability Statement
Data are contained within the article.
Conflicts of Interest
The authors declare no conflict of interest.
Nomenclature
The following momenclature are used in this manuscript:
| Set of all PEVs | |
| Set of charging time periods | |
| Set of distribution feeders | |
| Charging power of PEV n at time t | |
| Charging curve of PEV n (PEVs) over the entire charging horizon | |
| Required energy of PEV n | |
| Initial/Terminal energy level of PEV n | |
| Lower/Upper battery capacity limit of PEV n | |
| Energy level of PEV n at time t | |
| Rated charging/discharging power of PEV n | |
| Total load of PEVs on feeder l at time t | |
| Overload control threshold on feeder l at time t | |
| Maximum PEV demand that feeder l can support at time t | |
| Maximum loading capacity of feeder l at time t | |
| Basic demand load (i.e., non-PEV demand) transmitted on feeder l at time t (over the entire charging horizon) | |
| Set of distribution feeders that transfer power from the distribution substation to PEV n | |
| Set of PEVs using the distribution feeder l to carry the power | |
| Set of feasible charging configurations for PEV n (PEVs) | |
| Electricity price at time t | |
| Positive price coefficients at time | |
| Aggregate load of SCS at time t | |
| Energy cost of SCS at time t | |
| Total energy cost of SCS | |
| Fees paid by PEV n | |
| Index of profitability | |
| Proportion of the total energy consumption of PEV n in the aggregate load of SCS | |
| Cost function of PEV n | |
| Charging strategies of all PEVs except PEV n | |
| Generalized Nash equilibria of G | |
| Local data of PEV n (PEVs) | |
| One vector of T dimension | |
| Transpose of A | |
| Pseudo gradient for cost function of PEV n | |
| Column vector of pseudo gradient for cost function of PEVs | |
| Inequality constraint factors of PEV n (PEVs) | |
| Equality constraint factors of PEV n (PEVs) | |
| Dual variables of PEV n (PEVs) | |
| Zero vector (matrix) of n () dimension | |
| Set of neighbors of PEV n | |
| Local copy of multiplier of PEV n | |
| Local auxiliary variable of PEV n | |
| k | Index of iterations |
| M | Dimension of local data for PEV n |
| Euclidean space of M dimension (non-negative) | |
| Fixed constant step-sizes of PEV n |
References
- You, Y.; Yi, L. Energy industry Carbon neutrality transition path: Corpus-based AHP-DEMATEL system modelling. Energy Rep. 2022, 8, 25–39. [Google Scholar] [CrossRef]
- Esmaili, M.; Goldoust, A. Multi-objective optimal charging of plug-in electric vehicles in unbalanced distribution networks. Int. J. Electr. Power Energy Syst. 2015, 73, 644–652. [Google Scholar] [CrossRef]
- Jiang, H.; Ning, S.; Ge, Q. Multi-objective optimal dispatching of microgrid with large-scale electric vehicles. IEEE Access 2019, 7, 145880–145888. [Google Scholar] [CrossRef]
- Rahbari-Asr, N.; Chow, M.Y. Cooperative distributed demand management for community charging of PHEV/PEVs based on KKT conditions and consensus networks. IEEE Trans. Ind. Inform. 2014, 10, 1907–1916. [Google Scholar] [CrossRef]
- You, P.; Yang, Z.; Chow, M.Y.; Sun, Y. Optimal cooperative charging strategy for a smart charging station of electric vehicles. IEEE Trans. Power Syst. 2015, 31, 2946–2956. [Google Scholar] [CrossRef]
- Tan, K.M.; Ramachandaramurthy, V.K.; Yong, J.Y. Integration of electric vehicles in smart grid: A review on vehicle to grid technologies and optimization techniques. Renew. Sustain. Energy Rev. 2016, 53, 720–732. [Google Scholar] [CrossRef]
- Berthold, F.; Ravey, A.; Blunier, B.; Bouquain, D.; Williamson, S.; Miraoui, A. Design and development of a smart control strategy for plug-in hybrid vehicles including vehicle-to-home functionality. IEEE Trans. Transp. Electrif. 2015, 1, 168–177. [Google Scholar] [CrossRef]
- Nguyen, D.T.; Le, L.B. Joint optimization of electric vehicle and home energy scheduling considering user comfort preference. IEEE Trans. Smart Grid 2013, 5, 188–199. [Google Scholar] [CrossRef]
- Tuballa, M.L.; Abundo, M.L. A review of the development of Smart Grid technologies. Renew. Sustain. Energy Rev. 2016, 59, 710–725. [Google Scholar] [CrossRef]
- Goli, P.; Shireen, W. PV powered smart charging station for PHEVs. Renew. Energy 2014, 66, 280–287. [Google Scholar] [CrossRef]
- Wan, Y.; Qin, J.; Li, F.; Yu, X.; Kang, Y. Game theoretic-based distributed charging strategy for PEVs in a smart charging station. IEEE Trans. Smart Grid 2020, 12, 538–547. [Google Scholar] [CrossRef]
- Zhang, H.; Moura, S.J.; Hu, Z.; Qi, W.; Song, Y. A second-order cone programming model for planning PEV fast-charging stations. IEEE Trans. Power Syst. 2017, 33, 2763–2777. [Google Scholar] [CrossRef]
- Tan, J.; Wang, L. Integration of plug-in hybrid electric vehicles into residential distribution grid based on two-layer intelligent optimization. IEEE Trans. Smart Grid 2014, 5, 1774–1784. [Google Scholar] [CrossRef]
- Hagh, M.T.; Gargari, M.Z.; Pakdel, M.J.V. Sequential analysis of optimal transmission switching with contingency assessment. IET Gener. Transm. Distrib. 2018, 12, 1390–1396. [Google Scholar] [CrossRef]
- Bai, X.; Qiao, W.; Wei, H.; Huang, F.; Chen, Y. Bidirectional coordinating dispatch of large-scale V2G in a future smart grid using complementarity optimization. Int. J. Electr. Power Energy Syst. 2015, 68, 269–277. [Google Scholar] [CrossRef]
- Sun, S.; Yang, Q.; Yan, W. Optimal temporal-spatial electric vehicle charging demand scheduling considering transportation-power grid couplings. In Proceedings of the 2018 IEEE Power & Energy Society General Meeting (PESGM), Portland, OR, USA, 5–10 August 2018; pp. 1–5. [Google Scholar]
- Cheng, P.H.; Huang, T.H.; Chien, Y.W.; Wu, C.L.; Tai, C.S.; Fu, L.C. Demand-side management in residential community realizing sharing economy with bidirectional PEV while additionally considering commercial area. Int. J. Electr. Power Energy Syst. 2020, 116, 105512. [Google Scholar] [CrossRef]
- Wang, L.; Chen, B. Distributed control for large-scale plug-in electric vehicle charging with a consensus algorithm. Int. J. Electr. Power Energy Syst. 2019, 109, 369–383. [Google Scholar] [CrossRef]
- Lee, M. Multi-Task Deep Learning Games: Investigating Nash Equilibria and Convergence Properties. Axioms 2023, 12, 569. [Google Scholar] [CrossRef]
- Tushar, W.; Saad, W.; Poor, H.V.; Smith, D.B. Economics of electric vehicle charging: A game theoretic approach. IEEE Trans. Smart Grid 2012, 3, 1767–1778. [Google Scholar] [CrossRef]
- Yang, X.; Wang, G.; He, H.; Lu, J.; Zhang, Y. Automated demand response framework in ELNs: Decentralized scheduling and smart contract. IEEE Trans. Syst. Man Cybern. Syst. 2019, 50, 58–72. [Google Scholar] [CrossRef]
- Li, J.; Li, C.; Xu, Y.; Dong, Z.Y.; Wong, K.P.; Huang, T. Noncooperative game-based distributed charging control for plug-in electric vehicles in distribution networks. IEEE Trans. Ind. Inform. 2016, 14, 301–310. [Google Scholar] [CrossRef]
- Li, C.; Liu, C.; Deng, K.; Yu, X.; Huang, T. Data-driven charging strategy of PEVs under transformer aging risk. IEEE Trans. Control Syst. Technol. 2017, 26, 1386–1399. [Google Scholar] [CrossRef]
- Alsabbagh, A.; Yin, H.; Ma, C. Distributed electric vehicles charging management with social contribution concept. IEEE Trans. Ind. Inform. 2019, 16, 3483–3492. [Google Scholar] [CrossRef]
- Iria, J.; Coelho, A.; Soares, F. Network-secure bidding strategy for aggregators under uncertainty. Sustain. Energy Grids Netw. 2022, 30, 100666. [Google Scholar] [CrossRef]
- Ghavami, A.; Kar, K.; Gupta, A. Decentralized charging of plug-in electric vehicles with distribution feeder overload control. IEEE Trans. Autom. Control 2016, 61, 3527–3532. [Google Scholar] [CrossRef]
- Ardakanian, O.; Keshav, S.; Rosenberg, C. Real-time distributed control for smart electric vehicle chargers: From a static to a dynamic study. IEEE Trans. Smart Grid 2014, 5, 2295–2305. [Google Scholar] [CrossRef]
- Harks, T.; Schwarz, J. Generalized Nash equilibrium problems with mixed-integer variables. Math. Program. 2024, 2024, 1–47. [Google Scholar] [CrossRef]
- Drăgan, V.; Ivanov, I.G.; Popa, I.L. A Game—Theoretic Model for a Stochastic Linear Quadratic Tracking Problem. Axioms 2023, 12, 76. [Google Scholar] [CrossRef]
- Yi, P.; Pavel, L. An operator splitting approach for distributed generalized Nash equilibria computation. Automatica 2019, 102, 111–121. [Google Scholar] [CrossRef]
- Izuchukwu, C.; Reich, S.; Shehu, Y.; Taiwo, A. Strong convergence of forward–reflected–backward splitting methods for solving monotone inclusions with applications to image restoration and optimal control. J. Sci. Comput. 2023, 94, 73. [Google Scholar] [CrossRef]
- Dadashi, V.; Postolache, M. Forward–backward splitting algorithm for fixed point problems and zeros of the sum of monotone operators. Arab. J. Math. 2020, 9, 89–99. [Google Scholar] [CrossRef]
- Lin, X.; Zhang, T.; Li, M.; Zhang, R.; Zhang, W. Multi-Player Non-Cooperative Game Strategy of a Nonlinear Stochastic System with Time-Varying Parameters. Axioms 2023, 13, 3. [Google Scholar] [CrossRef]
- Wang, Z.; Li, X.; Liang, W.; Ma, J. Does a New Electric Vehicle Manufacturer Have the Incentive for Battery Life Investment? A Study Based on the Game Framework. Mathematics 2023, 11, 3551. [Google Scholar] [CrossRef]
- Yang, L.; Li, X.; Sun, M.; Sun, C. Hybrid policy-based reinforcement learning of adaptive energy management for the Energy transmission-constrained island group. IEEE Trans. Ind. Inform. 2023. [Google Scholar] [CrossRef]
- Li, Y.; Zhang, H.; Liang, X.; Huang, B. Event-triggered-based distributed cooperative energy management for multienergy systems. IEEE Trans. Ind. Inform. 2018, 15, 2008–2022. [Google Scholar] [CrossRef]

Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).