Abstract
This manuscript presents an efficient pair of hybrid Nyström techniques to solve second-order Lane–Emden singular boundary value problems directly. One of the proposed strategies uses three off-step points. The obtained formulas are paired with an appropriate set of formulas implemented for the first step to avoid singularity at the left end of the integration interval. The fundamental properties of the proposed scheme are analyzed. Some test problems, including chemical kinetics and physical model problems, are solved numerically to determine the efficiency and validity of the proposed approach.
1. Introduction
In this paper, we consider the following two-point singular boundary value problem (SBVP):
We consider this together with any of the two-point boundary conditions:
or
or
where are known real values and denotes a continuous real function, where we assume the necessary conditions to guarantee the existence of a unique solution to the problem. The existence and uniqueness of the solution to the problem (1) subjected to any of the boundary conditions above have been established by Pandey [1] and Zou [2].
According to Thula and Roul [3], the mathematical expression of numerous problems arising in chemical kinetics, astrophysics, catalytic diffusion reactions, celestial mechanics, engineering, and various physical models gives rise to second-order singular boundary value ordinary differential equations (SSBODEs) of the type given in (1).
The problem of reactant concentration in a chemical reactor, reaction–diffusion processes inside a porous catalyst, the conduction of heat in the human head, the distribution of oxygen in a spherical shell, and many others, can be modelled by the system (1).
Significantly, much work has been carried out to obtain numerical solutions for the above singular problems. Different strategies have been reported for solving (1), where the fundamental difficulty arises due to the singularity at . Notable scholars in the field of numerical analysis have proposed numerical techniques for solving the problem (1). Examples of such techniques include the finite difference methods (FDM) proposed in [4,5], the spline methods (SM) proposed in [6,7], the Padè approximation method (PAM) introduced in [8,9], the pseudospectral method (PM) proposed in [10], or the Jacobi–Gauss collocation method (JCM) reported in [11]. Other manuscripts on recently developed numerical or analytical techniques for solving (1)–(4) inlcude those of [12,13,14,15,16,17,18].
We propose a pair of hybrid Nyström techniques (PHNT) for solving the SBVPs given in (1) numerically. The main formulas provide a method of order six, which cannot solve the problem on its own due to the singularity at . We have designed a second ad hoc method that applies only to the first subinterval and is unaffected by singularity. In this way, we obtain a scheme capable of solving the problem posed effectively. Comparisons show that the proposed method is more advantageous than other existing methods. A problem of particular interest is how to select the optimal value of h. We have not addressed this issue here, but the CESTAC method and the CADNA library could be helpful for this task [19,20]. This technique is based on the use of stochastic arithmetic in place of floating-point arithmetic to validate the results and find an optimal solution.
The present work is outlined as follows. In Section 2, we present the PHNT method for solving SBVPs. The characteristics of the developed formulas are analyzed in Section 3. Some issues with the implementation of the PHNT are considered in Section 4. In Section 5, we present the numerical results of some physical models and catalytic diffusion–reaction problems to show the efficiency and reliability of the proposed technique. Some conclusions are outlined in Section 6.
2. Development of the PHNT Method
To obtain the PHNT method, we firstly reformulate the equation in (1) as , where . Thus, the singularity is transferred to the function f.
2.1. Main Formulas
We consider that the exact solution of the SBVP on an interval , with step size can be approximated by a polynomial in the form:
From this, it readily follows that:
where are unknown coefficients that must be specified using collocation conditions at some chosen nodes.
We take the following intermediate nodes on : and with . Consider the approximations in (5) and (6) evaluated at , as well as the one in (7) evaluated at . Doing this, we obtain a system of equations with seven unknowns , given by:
where and denote approximations of and , respectively. The system may be written in matrix form as:
Solving this system, we obtain the values of . Using the substitution the polynomial in (5) may be expressed as:
where , and the coefficients , , and depend on z.
Evaluating the formula in (8) and its derivative at , we obtain approximations of and , given, respectively, by:
Now, evaluating and at , we obtain the following hybrid Nyström-type formulas:
2.2. Formulas to Circumvent the Singularity
This block method cannot be used directly for solving a BVP problem with the differential equation in because it is not possible to evaluate , since there is a singularity at .
To overcome this drawback, we have developed a set of formulas specially designed for the subinterval , where the value is absent. These formulas are obtained similarly to before as:
For the remaining formulas, we obtain:
3. Characteristics of the Method
The main properties of the proposed technique PHNT are studied here, where the most challenging task is to analyze the convergence of the global method.
3.1. Consistency and Order of the Formulas
The formulas in – may be written as:
where are constant matrices containing the coefficients of the formulas (9)–(11), and:
Using standard strategies (see [21]), assuming that has enough derivatives, we define the operator ℓ related to the formulas in –:
where , and are, respectively, vector columns of and , while I denotes the set of indices, . Expanding in Taylor series about , we obtain:
where:
According to [16], the above operator and the associated formulas are said to be of order p if , with as the vector of local truncation errors. For the formulas in (9)–(11), we obtain and:
This shows that each of the above formulas is of order 5. Since the order of the formulas is greater than one, they are consistent. For the ad hoc formulas used for the first step, it is easy to see that they are also consistent.
3.2. Convergence Analysis
We start by defining convergence, then we will show that the proposed method is convergent by writing all the formulas in (9)–(14) in an appropriate matrix-vector form.
Definition 1.
Let denote the exact solution of the given singular boundary value problem and let be the approximations obtained with the developed numerical strategy. The method is said to be convergent of order p if, for a sufficiently small h, there exists a constant C independent of h, such that:
Note that in this situation, we obtain as .
Theorem 1
(Convergence theorem). Let be the true solution of the SBVP in with the boundary conditions in , and the discrete solution provided by the proposed global method. Then, the proposed method is convergent to order six.
Proof.
Following [22], we define the matrix D of dimension given by:
where the elements are sub-matrices, except the , which have a size of , and , which have a size of . Those sub-matrices are
For the rest of the submatrices not included above, it is —that is, they are null matrices.
We also define the matrix U of dimension :
where the elements are submatrices except the which have a size of . These submatrices are given as follows:
For the rest of submatrices not included above, it is —that is, they are null matrices.
We note that the submatrices and contain the coefficients of the formulas in (12)–(14) and those of the formulas in (9)–(11), for .
Let us denote the vectors of exact values as:
Note that Y has components while F has components, because, due to the boundary conditions in (2), and are known values, .
The exact form of the discretized formulas to approximate the boundary value problem can be written as:
where we have included the dimensions for clarity. Here, is a vector that contains the known values—that is:
and is another vector containing the LTEs of the formulas, given by:
Concerning the approximate values, they are provided by the system:
where approximates the vector —that is:
In addition:
Through the Mean-Value Theorem in [23], we can put any convenient subindex i as:
where denotes intermediate points in the line between and . Thus, we can say that:
Note that in the second identity we have used, and .
In view of the above, the equation in (21) may be arranged as:
Setting , we simply find that:
Following [24], we prove that, except for a few selected values of , matrix M is invertible. If we use the abbreviated notation , given the form of this matrix where the submatrices have many zeros, it is easy to verify that, for , the determinant is . Now, by induction, it can be proven that ; thus is invertible as long as it is .
Now, the matrix M may be rewritten as:
where is the identity matrix of order and . Thus, we find that .
As is the characteristic polynomial of B, in order to have , if we take it is sufficient to choose h, such that:
The maximum norm in , , and the corresponding matrix-induced norm in are considered. If we expand the terms of in powers of h, it can be shown that .
Assuming that has in bounded derivatives up to the necessary order, from (24) and the vector of local truncation errors, we can obtain:
We have shown that the global method exhibits a fifth-order convergence. Nevertheless, in view of the form of the vector , we see that, assuming the sufficient smoothness of the solution, at the mesh points we obtain a superconvergence order (see Ascher et al. [25]):
Therefore, the proposed method is convergent, providing sixth-order approximations. □
4. Implementation Issues
The PHNT is implemented in a block unification mode. We rewrite the systems in (20) as and the unknowns as:
Then, we use Modified Newton’s method (MNM) to solve non-linear equations, since the PHNT is an implicit scheme. The MNM is given by:
where represents the jacobian matrix of . The starting values for using MNM for solving the systems given in (12)–(14) for each iteration are taken as those provided by the linear interpolation obtained throughout the boundary values, while the stopping criterion considers a maximum number of 100 iterations and an error between two successive approximations of less than .
We enumerate and summarize how the PHNT is utilized to give numerical solutions to physical models and catalytic diffusion–reaction problems as follows:
- Let us take , and define to generate the partition:
- We make just one block matrix equation by joining all the equations generated in the previous step of the partition with the given boundary conditions.
- We solve the single block matrix equation simultaneously to obtain the approximate solutions for the SBVP on the whole interval .
5. Numerical Illustrations
This section presents the numerical outcomes and discussion of the proposed PHNT for the solution of the singular physical models and catalytic diffusion–reaction problems of the form . The accuracy of the PHNT is measured by utilizing the following formulas:
where ABER denotes the absolute error at the considered node, MAXABER is the maximum absolute error along the considered interval, is the theoretical solution, and is the approximate solution provided by the PHNT.
5.1. Example 1
We firstly consider the following scalar Lane–Emden singular equation (SCLSE), which corresponds to the reaction–diffusion process in a spherical permeable catalyst as reported in [3,26],
The general analytical solution of problem (25) is unknown, but its solution for is given by , where is the Thiele modulus and .
Table 1 presents the numerical results with the proposed method, showing that they are very close to the theoretical solution available for . The CPU time with the PHNT for the value of in Table 1 is s.

Table 1.
Comparison of and the exact solution on test 1 with .
To analyze the impact of the Thiele modulus on the concentration profile , we also considered other values of and n. Figure 1 displays the numerical outcomes for various values of and n. We observed that in Figure 1, the concentration profile increases when diminishes.
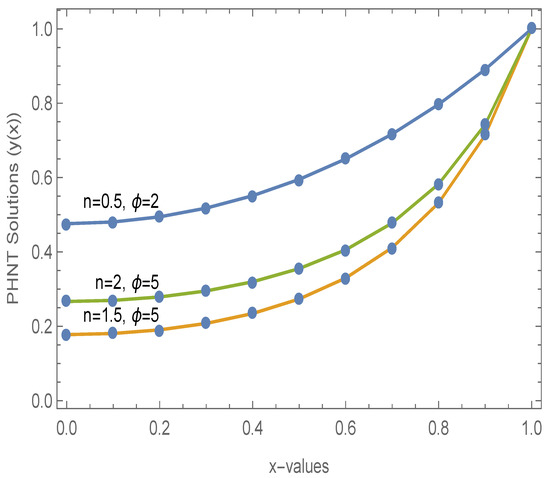
Figure 1.
Approximate solutions of PHNT for for different values of and n for Example 1.
5.2. Example 2
As a second test problem, we consider the non-homogeneous SCLSE, which corresponds to the physical model problem 2 in [4]:
where the exact solution is given by .
We have applied PHNT to test problem 2; Figure 2 presents the numerical solution of PHNT, which is very close to the exact solution for problem 2. Figure 3 shows a graphical representation of the absolute errors (ABER) for different values of x. The CPU time with the PHNT for the value of in Figure 2 and Figure 3 is s.
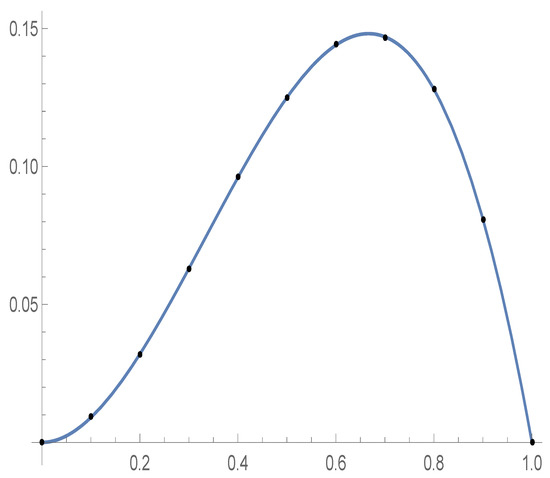
Figure 2.
Exact solution and the discrete one obtained with the PHNT for for Example 2.
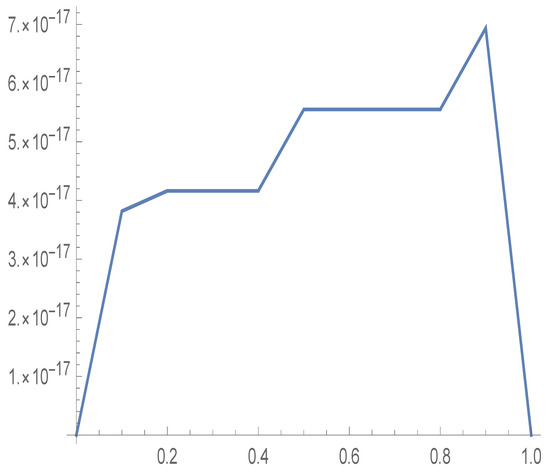
Figure 3.
Plot of the ABER with PHNT for for Example 2.
5.3. Example 3
Let us consider the non-linear SCLSE, which corresponds to the physical model problem of thermal explosion in cylindrical vessel reported by Thula and Roul [3] and Roul et al. [14]:
where the analytical solution is given by .
Test problem 3 is numerically solved using the new for different values of step size . The numerical results and the comparisons of MAXABER and ABER between and the methods in [3,14] are abridged in Table 2.
Table 2.
Maximum absolute errors (MAXABER) for test problem 3.
We note that the method presents a better performance compared with the techniques in [3,14]. Additionally, the CPU time in our proposed to obtain the approximate solutions for problem 3 with step size is In Table 2, we have included the numerical rate of convergence (ROC) with the following formula:
5.4. Example 4
As a test problem 4, we consider a non-linear homogeneous SCLSE, which corresponds to the physical model problem arising in chemistry and chemical kinetics. The formulation of heat and mass transfer within porous catalyst particles is reported by Ravikanth [27]:
where the analytical solution is unknown.
We solved problem 4 with the PHNT scheme for . The PHNT approximate solutions for and for different values of x are plotted in Figure 4.
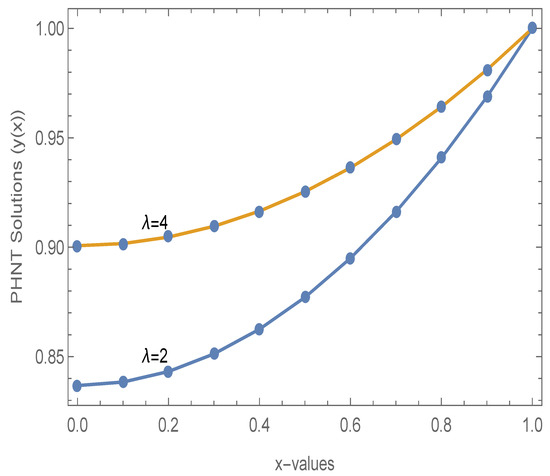
Figure 4.
Approximate solutions of PHNT for for different values of and for test problem 4.
Table 3 contains the numerical results provided by PHNT. We also used, for comparison, the cubic spline method (CSM) and the modified Adomian decomposition technique (MADT) in [13,27], with the PHNT being significantly better. The CPU time used by PHNT for with the specifications in Table 3 is s.
Table 3.
Comparison of approximation solutions for test problem 4 for .
6. Conclusions
This work presented a reliable PHNT approach for solving the scalar and system of SBVP of Lane-Emden type in various physical models and chemical kinetics. We employed a set of optimized hybrid block formulas given in (9)–(11) which are combined with an appropriate starting algorithm in (12)–(14) specifically designed to cope with the singularity at the beginning of the integration interval of the considered problem. Four real-world model problems in applied sciences and engineering are solved numerically to show the strength and quality of the proposed PHNT. The obtained approximate results in Table 1, Table 2 and Table 3 and Figure 1, Figure 2, Figure 3 and Figure 4 accentuate the effectiveness of the new methodology. An interesting question to be addressed in future investigations is how to select the optimal stepsizes. Notice that we have used the same step size for both groups of formulas, but we could have chosen one stepsize for the formulas in (9)–(11) and another for the formulas in (12)–(14). How to obtain the optimal values for these step sizes is an open question.
Author Contributions
Conceptualization, M.A.R. and H.R.; methodology, M.A.R. and H.R.; validation, M.A.R. and H.R.; formal analysis, M.A.R. and H.R.; investigation, M.A.R. and H.R.; data curation, H.R.; writing—original draft preparation, M.A.R.; writing—review and editing, M.A.R. and H.R. All authors have read and agreed to the published version of the manuscript.
Funding
This research did not receive any funding.
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
Not applicable.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Pandey, R.K. On a class regular singular two point boundary value problems. J. Math. Anal. Appl. 1997, 208, 388–403. [Google Scholar] [CrossRef][Green Version]
- Zou, H. A priori estimates for a semilinear elliptic system without variational structure and their applications. Math. Ann. 2002, 323, 713–735. [Google Scholar] [CrossRef]
- Thula, K.; Roul, P. A High-Order B-Spline Collocation Method for Solving Nonlinear Singular Boundary Value Problems Arisin g in Engineering and Applied Science. Mediterr. J. Math. 2018, 15, 176. [Google Scholar] [CrossRef]
- Kumar, M. A three point finite difference method for a class of singular two point boundary value problems. J. Compu. Appl. Math. 2002, 145, 89–97. [Google Scholar] [CrossRef]
- Pandey, R.K.; Singh, A.K. On the convergence of a finite difference method for a class of singular boundary value problems arising in physiology. J. Compu. Appl. Math. 2004, 166, 553–564. [Google Scholar] [CrossRef]
- Iyengar, S.R.K.; Jain, P. Spline finite difference methods for singular two point boundary value problem. Numer. Math. 1987, 50, 363–376. [Google Scholar] [CrossRef]
- Caglar, H.; Caglar, N.; Ozer, M. B-spline solution of non-linear singular boundary value problems arising in physiology. Chaos Solitions Fract. 2009, 39, 1232–1237. [Google Scholar] [CrossRef]
- Allouche, H.; Tazdayte, A. Numerical solution of singular boundary value problems with logarithmic singularities by padè approximation and collocation methods. J. Comput. Appl. Math. 2017, 311, 324–341. [Google Scholar] [CrossRef]
- Tazdayte, A.; Allouche, H. Mixed method via Pad è approximation and optimal cubic B-spline collocation for solving non-linear singular boundary value problems. SeMA J. 2019, 76, 383–401. [Google Scholar] [CrossRef]
- Mehrpouya, M.A. An efficient pseudospectral method for numerical solution of nonlinear singular initial and boundary value problems arising in astrophysics. Math. Methods Appl. Sci. 2016, 39, 3204–3214. [Google Scholar] [CrossRef]
- Bhrawy, A.H.; Alofi, A.S. A Jacobi-Gauss collocation method for solving nonlinear Lane-Emden type equations. Commun. Nonlinear Sci. Numer. Simul. 2012, 17, 62–70. [Google Scholar] [CrossRef]
- Swati; Singh, K.; Verma, A.K.; Singh, M. Higher order Emden–Fowler type equations via uniform Haar Wavelet resolution technique. J. Comput. Appl. Math. 2020, 376, 112836. [Google Scholar] [CrossRef]
- Roul, P. A new mixed MADM-Collocation approach for solving a class of Lane-Emden singular boundary value problems. J. Math. Chem. 2019, 57, 945–969. [Google Scholar] [CrossRef]
- Roul, P.; Thula, K.; Agarwal, R. Non-optimal fourth-order and optimal sixth-order B-spline collocation methods for Lane-Emden boundary value problems. Appl. Numer. Math. 2019, 145, 342–360. [Google Scholar] [CrossRef]
- Singh, R.; Garg, H.; Guleria, V. Haar wavelet collocation method for Lane-Emden equations with Dirichlet, Neumann and Neumann-Robin boundary conditions. J. Comput. Appl. Math. 2019, 346, 150–161. [Google Scholar] [CrossRef]
- Rufai, M.A.; Ramos, H. Numerical solution of second-order singular problems arising in astrophysics by combining a pair of one-step hybrid block Nyström methods. Astrophys. Space Sci. 2020, 365, 96. [Google Scholar] [CrossRef]
- Ramos, H.; Singh, G. A High-Order Efficient Optimised Global Hybrid Method for Singular Two-Point Boundary Value Problems. East Asian J. Appl. Math. 2021, 11, 515–539. [Google Scholar] [CrossRef]
- Gümgxuxm, S. Taylor wavelet solution of linear and non-linear Lane-Emden equations. Appl. Numer. Math. 2020, 158, 44–53. [Google Scholar] [CrossRef]
- Kelishamia, H.B.; Araghia, M.A.F.; Allahviranloob, T. Dynamical control of computations using the finite differences method to solve fuzzy boundary value problem. J. Intell. Fuzzy Syst. 2019, 36, 1785–1796. [Google Scholar] [CrossRef]
- Fariborzi Araghi, M.A. A reliable algorithm to check the accuracy of iterative schemes for solving nonlinear equations: An application of the CESTAC method. SeMA J. 2020, 77, 275–289. [Google Scholar] [CrossRef]
- Ramos, H.; Mehta, S.; Vigo-Aguiar, J. A unified approach for the development of k-step block Falkner-type methods for solving general second-order initial-value problems in ODEs. J. Comput. Appl. Math. 2017, 318, 550–564. [Google Scholar] [CrossRef]
- Rufai, M.A.; Ramos, H. Numerical solution of Bratu’s and related problems using a third derivative hybrid block method. Comp. Appl. Math. 2020, 39, 322. [Google Scholar] [CrossRef]
- Lambert, J.D. Numerical Methods for Ordinary Differential Systems: The Initial Value Problem, 1st ed.; John Wiley: New York, NY, USA, 1991. [Google Scholar]
- Rufai, M.A.; Ramos, H. One-step hybrid block method containing third derivatives and improving strategies for solving Bratu’s and Troesch’s problems. Numer. Math. Theory Methods Appl. 2020, 13, 946–972. [Google Scholar]
- Ascher, U.; Christiansen, J.; Russell, R.D. A collocation solver for mixed order systems of boundary value problems. Math. Comp. 1979, 33, 659–679. [Google Scholar] [CrossRef]
- Danish, M.; Kumar, S.; Kumar, S. A note on the solution of singular boundary value problems arising in engineering and applied sciences, use of OHAM. Comput. Chem. Eng. 2012, 36, 57–67. [Google Scholar] [CrossRef]
- Ravi Kanth, A.S.V. Cubic spline polynomial for non-linear singular two-point boundary value problems. Appl. Math. Comput. 2007, 189, 2017–2022. [Google Scholar] [CrossRef]




Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).