Orientational Sampling Schemes Based on Four Dimensional Polytopes

Abstract
:1. Introduction
1.1. Gaussian Spherical Quadrature
1.2. Two-angle Sampling and Regular Polyhedra
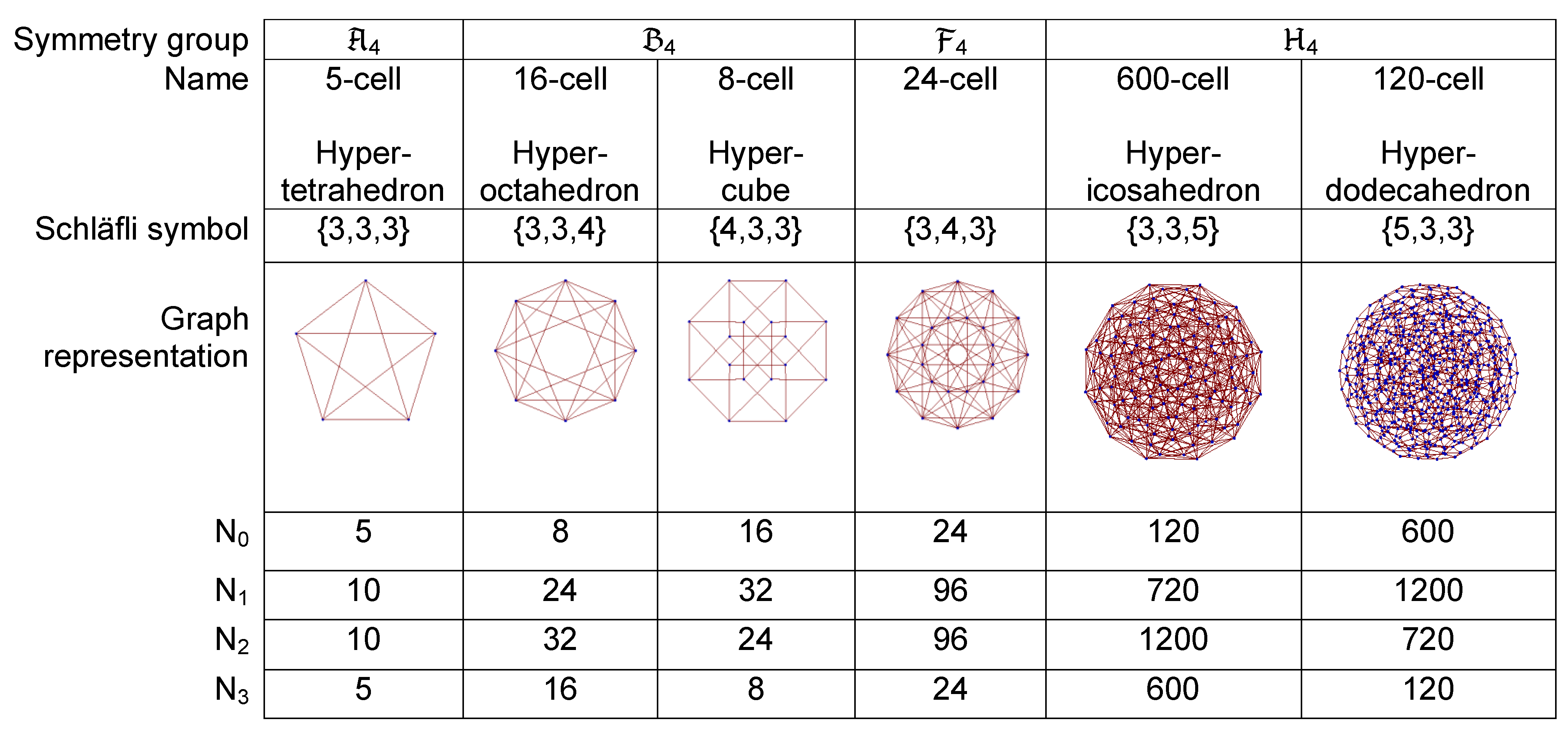
1.3. Three-Angle Sampling and Regular 4-Polytopes
2. Group Theory and Symmetry Averaging
2.1. Groups, Representations and Characters
2.2. Subgroup Averaging
2.3. Average of a Function in n-dimensional Space
2.4. Average of a Function Over the Polytope Vertices
3. Polyhedral Averaging in Three Dimensions
3.1. Proper and Improper Rotations
3.2. Representations and Characters of Isometries
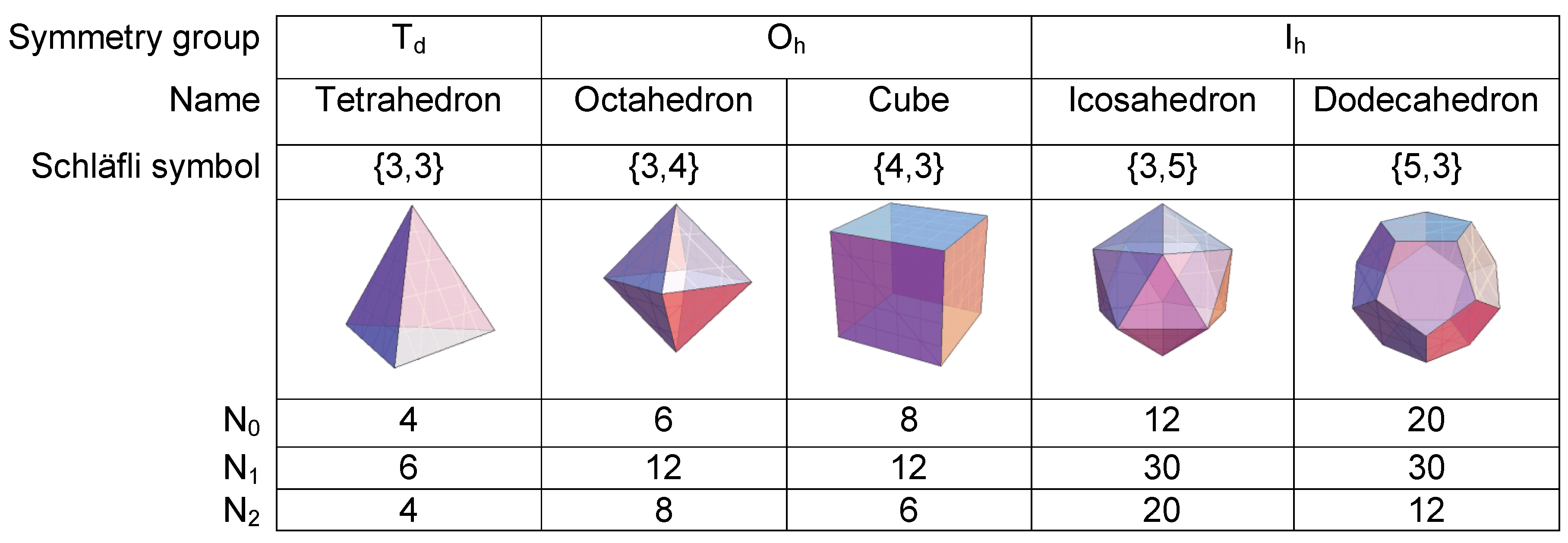
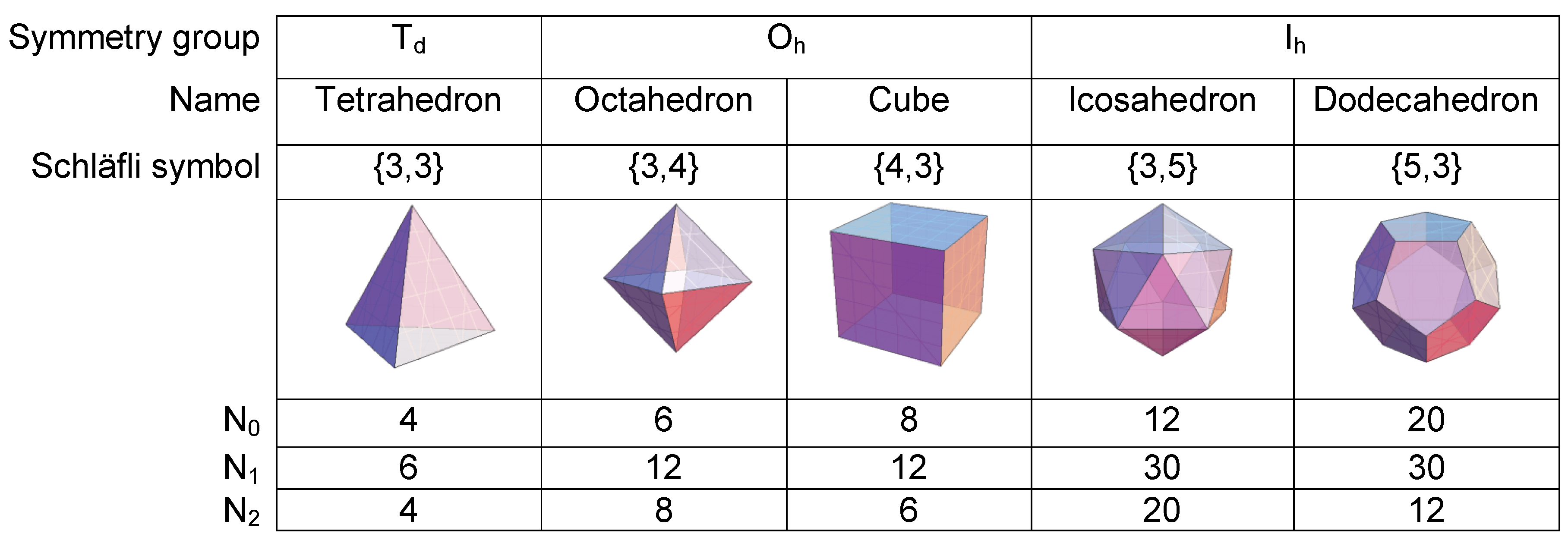
3.3. Regular Convex Polyhedra
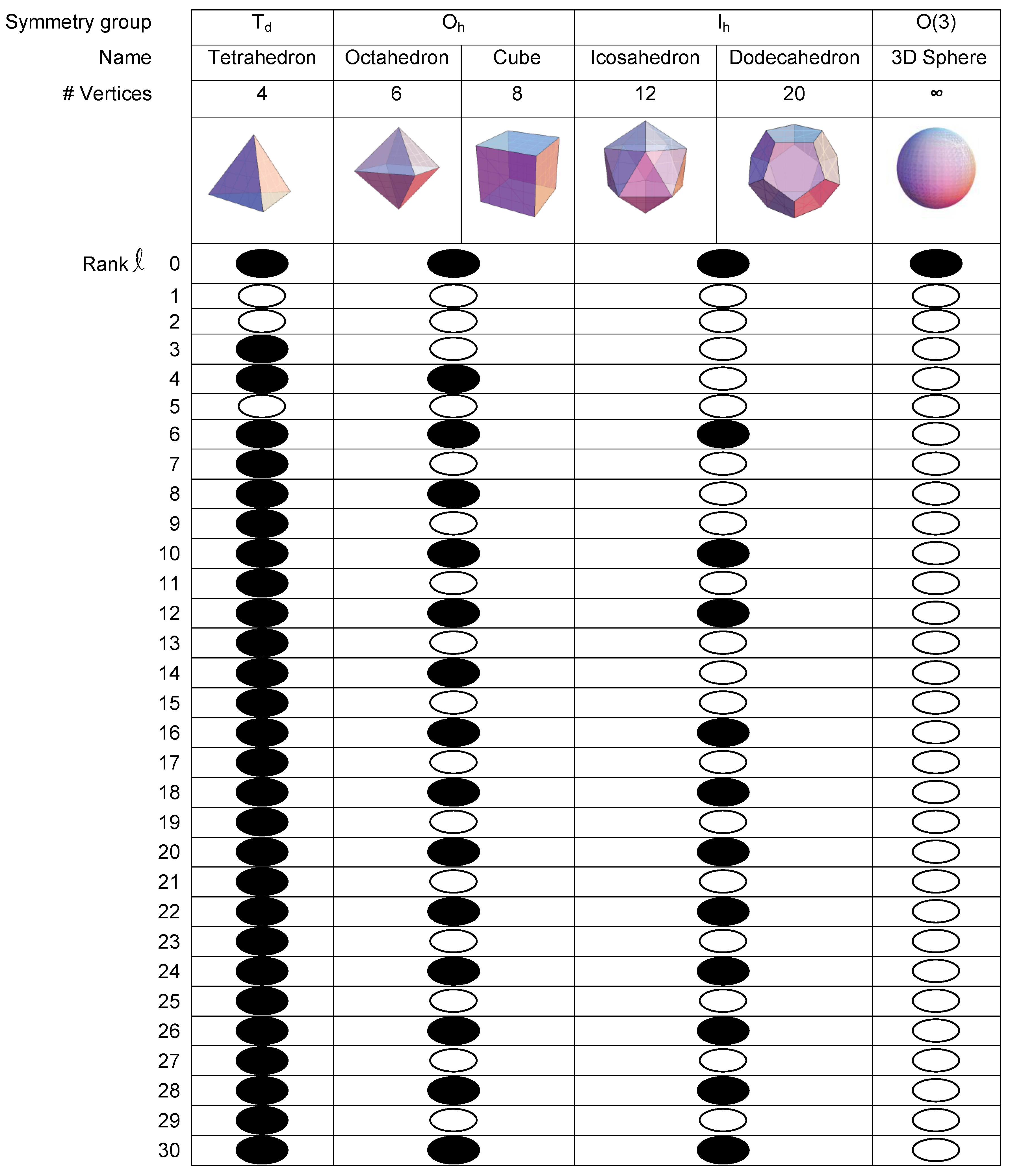
3.4. Spherical Moments of the Regular Polyhedra
4. Polytopic Averaging in Four Dimensions
4.1. Quaternions
4.2. Unit Quaternions and 3D Rotations
4.3. Proper and Improper Rotations
4.4. Representation and Characters of Isometries
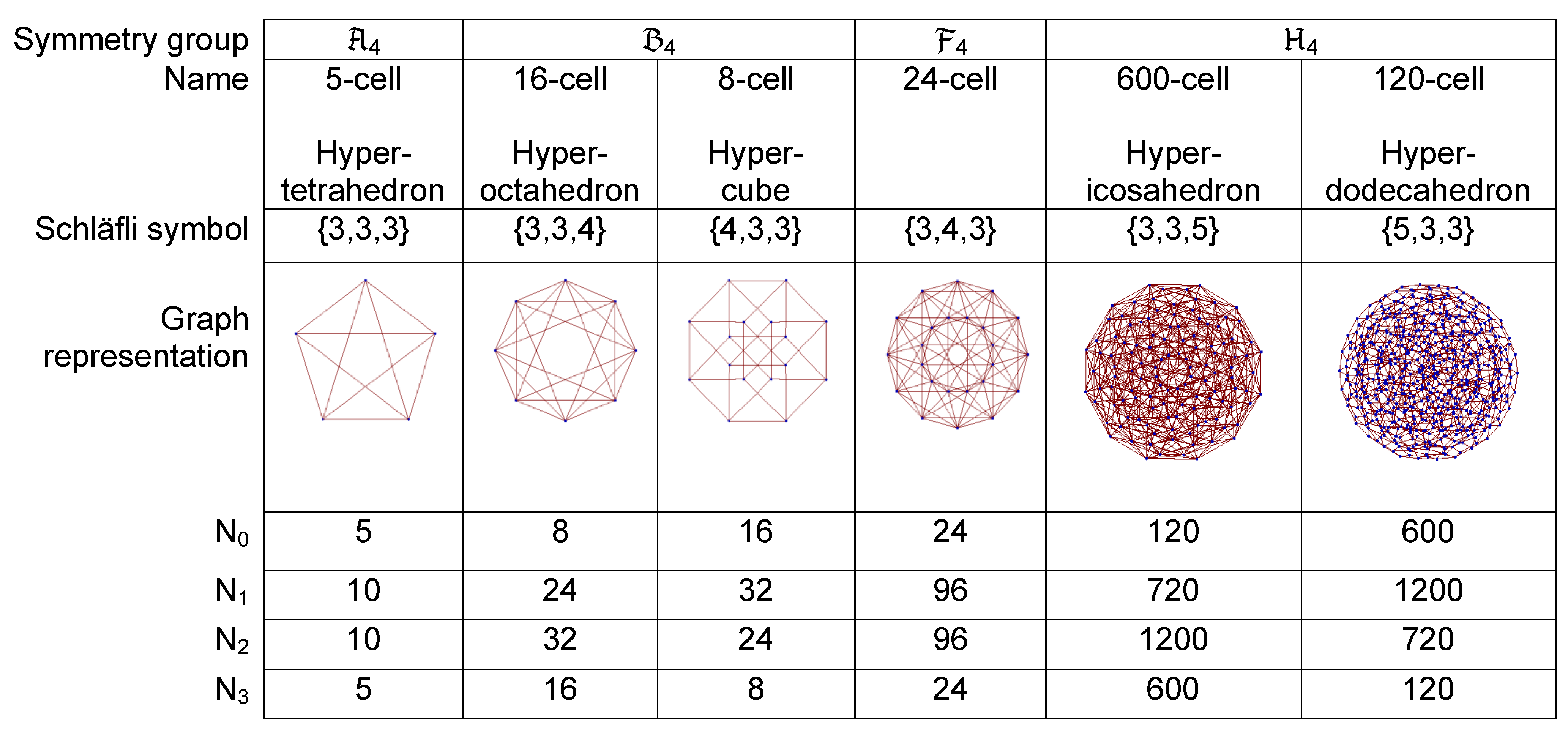
4.5. Regular Convex 4-Polytopes
4.6. Spherical Moments of the Regular 4-Polytopes
5. Euler Angles
6. Conclusions
Acknowledgements
References
- Mehring, M. High Resolution NMR in Solids, 2nd ed.; NMR-Basic Principles and Progress; Springer: Berlin, Germany, 1982; Volume 11. [Google Scholar]
- Levitt, M.H. Spin Dynamics. Basics of Nuclear Magnetic Resonance, 2nd ed.; Wiley: Chichester, UK, 2007. [Google Scholar]
- Bak, M.; Nielsen, N.C. REPULSION, A Novel Approach to Efficient Powder Averaging in Solid-State NMR. J. Magn. Reson. 1997, 125, 132–139. [Google Scholar] [CrossRef] [PubMed]
- Edén, M.; Levitt, M.H. Computation of Orientational Averages in Solid-State NMR by Gaussian Spherical Quadrature. J. Magn. Reson. 1998, 132, 220–239. [Google Scholar] [CrossRef] [PubMed]
- Edén, M. Computer simulations in solid-state NMR. III. Powder averaging. Concepts Magn. Reson. 2003, 18A, 24–55. [Google Scholar] [CrossRef]
- Stevensson, B.; Edén, M. Efficient orientational averaging by the extension of Lebedev grids via regularized octahedral symmetry expansion. J. Magn. Reson. 2006, 181, 162–176. [Google Scholar] [CrossRef] [PubMed]
- Suter, D.; Pearson, J.G. Experimental Classification of Multi-Spin Coherence under the Full Rotation Group. Chem. Phys. Lett. 1988, 144, 328–332. [Google Scholar] [CrossRef]
- Van Beek, J.D.; Carravetta, M.; Antonioli, G.C.; Levitt, M.H. Spherical tensor analysis of nuclear magnetic resonance signals. J. Chem. Phys. 2005, 122, 244510. [Google Scholar] [CrossRef] [PubMed]
- Pileio, G.; Levitt, M.H. Isotropic filtering using polyhedral phase cycles: Application to singlet state NMR. J. Magn. Reson. 2008, 191, 148–155. [Google Scholar] [CrossRef] [PubMed]
- Varshalovich, D.A.; Moskalev, A.N.; Khersonskii, V.K. Quantum theory of angular momentum; World Scientific Publishing: Teaneck, NJ, USA, 1988. [Google Scholar]
- Samoson, A.; Sun, B.Q.; Pines, A. New angles in motional averaging. In Pulsed Magnetic Resonance: NMR, ESR, and Optics, A recognition of E. L. Hahn; Bagguley, D.M.S., Ed.; Oxford Science Publications: Oxford, UK, 1992. [Google Scholar]
- Emsley, J.L.; Schmidt-Rohr, K.; Pines, A. Group theory and NMR dynamics. In NMR and More: In Honour of Anatole Abragam; Goldman, M., Por, M., Eds.; Les Editions de Physique: Paris, France, 1994. [Google Scholar]
- Lebedev, V.I. Quadratures on a Sphere. Zh. Vychisl. Mat. mat. Fiz. 1975, 15, 48. [Google Scholar] [CrossRef]
- Lebedev, V.I. Quadratures on a Sphere. Zh. Vychisl. Mat. mat. Fiz. 1976, 16, 293. [Google Scholar] [CrossRef]
- Lebedev, V.I.; Skorokhodov, A.L. Quadrature Formulas of Orders 41, 47 and 53 for the Sphere. Russian Acad. Sci. Dokl. Math. 1992, 45, 587. [Google Scholar]
- Weissenstein, E.W. Regular Polychoron. http://mathworld.wolfram.com/RegularPolychoron.html (accessed on 6 July 2010).
- Coxeter, H.S.M. Regular Polytopes; Methuen: London, UK, 1948. [Google Scholar]
- Delsarte, P.; Goethals, J.M.; Jacob, S.J. Spherical codes and designs. Geom. Dedicata 1977, 6, 363–388. [Google Scholar] [CrossRef]
- Du Val, P. Homographies, quaternions and rotations; Oxford University Press: Oxford, UK, 1964. [Google Scholar]
- Frobenius, F. Über die Charaktere der symmetrischen Gruppe. Sitzungberichte der Königlich Preussischen Akademie der Wissenschaften zu Berlin 1900, 516–534. [Google Scholar]
- Veysseyre, R.; Weigel, D.; Phan, T.; Effantin, J.M. Crystallography, geometry and physics in higher dimensions. II. Point symmetry of holohedries of the two hypercubic crystal systems in four-dimensional space. Acta Cryst. Sec. A 1984, 40, 331–337. [Google Scholar] [CrossRef]
- Kondo, T. The characters of the Weyl group of type F4. J. Fac. Sci. Univ. Tokyo Sect. I 1965, 11, 145–153. [Google Scholar]
- Grove, L.C. The characters of the hecatonicosahedroidal group. J. Reine Angew. Math. 1974, 265, 160–169. [Google Scholar]
- Levitt, M.H. An Orientational Sampling Scheme for Magnetic Resonance based on a Four-Dimensional Polytope. In Future Directions in Magnetic Resonance; Khetrapal, C.L., Ed.; Springer: Berlin, Germany, 2010. [Google Scholar]
- Armstrong, M.A. Groups and Symmetry; Sringer-Verlag: New York, NY, USA, 1988. [Google Scholar]
- Herstein, I.N. Topics in algebra, 2nd ed.; Xerox College Publishing: Lexington, KY, USA, 1975. [Google Scholar]
- Cotton, A. Chemical Applications of Group Theory, 3rd ed.; Wiley: New York, NY, USA, 1990. [Google Scholar]
- Hamermesh, M. Group theory and its application to physical problems; Addison-Wesley: London, UK, 1962. [Google Scholar]
- Altmann, S.L. Rotations, quaternions, and double groups; Oxford University Press: New York, NY, USA, 1986. [Google Scholar]
- Wigner, E.P. Group theory and its application to the quantum mechanics of atomic spectra; Academic Press: New York, NY, USA, 1971. [Google Scholar]
- Wolfram, S. Mathematica: A System for Doing Mathematics by Computer; Addison-Wesley: New York, NY, USA, 1991. [Google Scholar]
- Cohn, H.; Kumar, A. Universally optimal distribution of points on spheres. J. Amer. Math. Soc. 2007, 20, 99–148. [Google Scholar] [CrossRef]
- Altschuler, E.L.; Perez-Garrido, A.; Stong, R. A Novel Symmetric Four Dimensional Polytope Found Using Optimization Strategies Inspired by Thomson’s Problem of Charges on a Sphere. 2008; arXiv:physics/0601139v1. [Google Scholar]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symmetry group | h | Symmetry operations |
| 24 | ||
| 48 | ||
| 120 |
| Symmetry group | h | Symmetry operations |
| 120 | ||
| 384 | ||
| 1152 | ||
| 14 400 | ||
| Name | Vertex Coordinates |
| 5-cell or hypertetrahedron | |
| 16-cell or hyperoctahedron | |
| 8-cell or hypercube | |
| 24-cell | |
| 600-cell or hypericosahedron | |
| 120-cell or hyperdodecahedron |
| 0 | 0 | 0 |
| 69.0948 | 104.478 | 159.095 |
| 110.905 | 104.478 | 20.9052 |
| 249.095 | 104.478 | 339.095 |
| 290.905 | 104.478 | 200.905 |
| 0 | 0 | 0 |
| 0 | 180 | 0 |
| 180 | 0 | 0 |
| 180 | 180 | 0 |
| 0 | 90 | 90 |
| 0 | 90 | 270 |
| 90 | 90 | 0 |
| 90 | 90 | 180 |
| 180 | 90 | 90 |
| 180 | 90 | 270 |
| 270 | 90 | 0 |
| 270 | 90 | 180 |
| 0 | 0 | 0 | 180 | 0 | 0 |
| 0 | 90 | 90 | 180 | 90 | 90 |
| 0 | 90 | 270 | 180 | 90 | 270 |
| 0 | 180 | 0 | 180 | 180 | 0 |
| 90 | 90 | 0 | 270 | 90 | 0 |
| 90 | 90 | 180 | 270 | 90 | 180 |
| 0 | 0 | 0 | 180 | 0 | 0 |
| 0 | 90 | 90 | 180 | 90 | 90 |
| 0 | 90 | 270 | 180 | 90 | 270 |
| 0 | 180 | 0 | 180 | 180 | 0 |
| 20.9052 | 60 | 200.905 | 200.905 | 60 | 20.9052 |
| 20.9052 | 120 | 159.095 | 200.905 | 60 | 200.905 |
| 20.9052 | 60 | 20.9052 | 200.905 | 120 | 159.095 |
| 20.9052 | 120 | 339.095 | 200.905 | 120 | 339.095 |
| 58.2826 | 36 | 58.2826 | 238.283 | 36 | 58.2826 |
| 58.2826 | 36 | 238.283 | 238.283 | 36 | 238.283 |
| 58.2826 | 72 | 121.717 | 238.283 | 72 | 121.717 |
| 58.2826 | 72 | 301.717 | 238.283 | 72 | 301.717 |
| 58.2826 | 108 | 58.2826 | 238.283 | 108 | 58.2826 |
| 58.2826 | 108 | 238.283 | 238.283 | 108 | 238.283 |
| 58.2826 | 144 | 121.717 | 238.283 | 144 | 121.717 |
| 58.2826 | 144 | 301.717 | 238.283 | 144 | 301.717 |
| 90 | 90 | 0 | 270 | 90 | 0 |
| 90 | 90 | 180 | 270 | 90 | 180 |
| 121.717 | 36 | 121.717 | 301.717 | 36 | 121.717 |
| 121.717 | 36 | 301.717 | 301.717 | 36 | 301.717 |
| 121.717 | 72 | 58.2826 | 301.717 | 72 | 58.2826 |
| 121.717 | 72 | 238.283 | 301.717 | 72 | 238.283 |
| 121.717 | 108 | 121.717 | 301.717 | 108 | 121.717 |
| 121.717 | 108 | 301.717 | 301.717 | 108 | 301.717 |
| 121.717 | 144 | 58.2826 | 301.717 | 144 | 58.2826 |
| 121.717 | 144 | 238.283 | 301.717 | 144 | 238.283 |
| 159.095 | 60 | 159.095 | 339.095 | 60 | 159.095 |
| 159.095 | 60 | 339.095 | 339.095 | 60 | 339.095 |
| 159.095 | 120 | 20.9052 | 339.095 | 120 | 20.9052 |
| 159.095 | 120 | 200.905 | 339.095 | 120 | 200.905 |
| 0 | 90 | 0 | 90 | 90 | 90 | 180 | 90 | 0 | 270 | 90 | 90 |
| 0 | 90 | 180 | 90 | 90 | 270 | 180 | 90 | 180 | 270 | 90 | 270 |
| 7.25597 | 49.1176 | 70.6909 | 90 | 180 | 0 | 187.256 | 49.1176 | 70.6909 | 270 | 180 | 0 |
| 7.25597 | 49.1176 | 250.691 | 95.6599 | 75.5225 | 137.470 | 187.256 | 49.1176 | 250.691 | 275.660 | 75.5225 | 137.470 |
| 7.25597 | 130.882 | 109.309 | 95.6599 | 75.5225 | 317.471 | 187.256 | 130.882 | 109.309 | 275.660 | 75.5225 | 317.471 |
| 7.25597 | 130.882 | 289.309 | 95.6599 | 104.478 | 42.5298 | 187.256 | 130.882 | 289.309 | 275.660 | 104.478 | 42.5298 |
| 14.5454 | 84.5204 | 131.110 | 95.6599 | 104.478 | 222.530 | 194.546 | 84.5204 | 131.110 | 275.660 | 104.478 | 222.530 |
| 14.5454 | 84.5204 | 311.110 | 98.3008 | 41.4096 | 98.3008 | 194.546 | 84.5204 | 311.110 | 278.301 | 41.4096 | 98.3008 |
| 14.5454 | 95.4796 | 48.8895 | 98.3008 | 41.4096 | 278.301 | 194.546 | 95.4796 | 48.8895 | 278.301 | 41.4096 | 278.301 |
| 14.5454 | 95.4796 | 228.890 | 98.3008 | 138.590 | 81.6992 | 194.546 | 95.4796 | 228.890 | 278.301 | 138.590 | 81.6992 |
| 20.9052 | 15.5225 | 20.9052 | 98.3008 | 138.590 | 261.699 | 200.905 | 15.5225 | 20.9052 | 278.301 | 138.590 | 261.699 |
| 20.9052 | 15.5225 | 200.905 | 105.450 | 69.7882 | 105.450 | 200.905 | 15.5225 | 200.905 | 285.450 | 69.7882 | 105.450 |
| 20.9052 | 44.4775 | 159.095 | 105.450 | 69.7882 | 285.450 | 200.905 | 44.4775 | 159.095 | 285.450 | 69.7882 | 285.450 |
| 20.9052 | 44.4775 | 339.095 | 105.450 | 110.212 | 74.5496 | 200.905 | 44.4775 | 339.095 | 285.450 | 110.212 | 74.5496 |
| 20.9052 | 60 | 110.905 | 105.450 | 110.212 | 254.550 | 200.905 | 60 | 110.905 | 285.450 | 110.212 | 254.550 |
| 20.9052 | 60 | 290.905 | 109.309 | 49.1176 | 172.744 | 200.905 | 60 | 290.905 | 289.309 | 49.1176 | 172.744 |
| 20.9052 | 75.5225 | 159.095 | 109.309 | 49.1176 | 352.7441 | 200.905 | 75.5225 | 159.095 | 289.309 | 49.1176 | 352.7441 |
| 20.9052 | 75.5225 | 339.095 | 109.309 | 130.882 | 7.25597 | 200.905 | 75.5225 | 339.095 | 289.309 | 130.882 | 7.25597 |
| 20.9052 | 104.478 | 20.9052 | 109.309 | 130.882 | 187.256 | 200.905 | 104.478 | 20.9052 | 289.309 | 130.882 | 187.256 |
| 20.9052 | 104.478 | 200.905 | 110.905 | 60 | 20.9052 | 200.905 | 104.478 | 200.905 | 290.905 | 60 | 20.9052 |
| 20.9052 | 120 | 69.0948 | 110.905 | 60 | 200.905 | 200.905 | 120 | 69.0948 | 290.905 | 60 | 200.905 |
| 20.9052 | 120 | 249.095 | 110.905 | 120 | 159.095 | 200.905 | 120 | 249.095 | 290.905 | 120 | 159.095 |
| 20.9052 | 135.522 | 20.9052 | 110.905 | 120 | 339.095 | 200.905 | 135.522 | 20.9052 | 290.905 | 120 | 339.095 |
| 20.9052 | 135.522 | 200.905 | 121.717 | 36 | 31.7175 | 200.905 | 135.522 | 200.905 | 301.717 | 36 | 31.7175 |
| 20.9052 | 164.478 | 159.095 | 121.717 | 36 | 211.717 | 200.905 | 164.478 | 159.095 | 301.717 | 36 | 211.717 |
| 20.9052 | 164.478 | 339.095 | 121.717 | 72 | 148.283 | 200.905 | 164.478 | 339.095 | 301.717 | 72 | 148.283 |
| 31.7175 | 36 | 121.717 | 121.717 | 72 | 328.283 | 211.717 | 36 | 121.717 | 301.717 | 72 | 328.283 |
| 31.7175 | 36 | 301.717 | 121.717 | 108 | 31.7175 | 211.717 | 36 | 301.717 | 301.717 | 108 | 31.7175 |
| 31.7175 | 72 | 58.2826 | 121.717 | 108 | 211.717 | 211.717 | 72 | 58.2826 | 301.717 | 108 | 211.717 |
| 31.7175 | 72 | 238.283 | 121.717 | 144 | 148.283 | 211.717 | 72 | 238.283 | 301.717 | 144 | 148.283 |
| 31.7175 | 108 | 121.717 | 121.717 | 144 | 328.283 | 211.717 | 108 | 121.717 | 301.717 | 144 | 328.283 |
| 31.7175 | 108 | 301.717 | 131.110 | 84.5204 | 14.5454 | 211.717 | 108 | 301.717 | 311.110 | 84.5204 | 14.5454 |
| 31.7175 | 144 | 58.2826 | 131.110 | 84.5204 | 194.546 | 211.717 | 144 | 58.2826 | 311.110 | 84.5204 | 194.546 |
| 31.7175 | 144 | 238.283 | 131.110 | 95.4796 | 165.455 | 211.717 | 144 | 238.283 | 311.110 | 95.4796 | 165.455 |
| 35.8898 | 25.2428 | 35.8898 | 131.110 | 95.4796 | 345.455 | 215.890 | 25.2428 | 35.8898 | 311.110 | 95.4796 | 345.455 |
| 35.8898 | 25.2428 | 215.890 | 137.470 | 75.5225 | 95.6599 | 215.890 | 25.2428 | 215.890 | 317.471 | 75.5225 | 95.6599 |
| 35.8898 | 154.757 | 144.110 | 137.470 | 75.5225 | 275.660 | 215.890 | 154.757 | 144.110 | 317.471 | 75.5225 | 275.660 |
| 35.8898 | 154.757 | 324.110 | 137.470 | 104.478 | 84.3401 | 215.890 | 154.757 | 324.110 | 317.471 | 104.478 | 84.3401 |
| 42.5298 | 75.5225 | 84.3401 | 137.470 | 104.478 | 264.340 | 222.530 | 75.5225 | 84.3401 | 317.471 | 104.478 | 264.340 |
| 42.5298 | 75.5225 | 264.340 | 144.110 | 25.2428 | 144.110 | 222.530 | 75.5225 | 264.340 | 324.110 | 25.2428 | 144.110 |
| 42.5298 | 104.478 | 95.6599 | 144.110 | 25.2428 | 324.110 | 222.530 | 104.478 | 95.6599 | 324.110 | 25.2428 | 324.110 |
| 42.5298 | 104.478 | 275.660 | 144.110 | 154.757 | 35.8898 | 222.530 | 104.478 | 275.660 | 324.110 | 154.757 | 35.8898 |
| 48.8895 | 84.5204 | 165.455 | 144.110 | 154.757 | 215.890 | 228.890 | 84.5204 | 165.455 | 324.110 | 154.757 | 215.890 |
| 48.8895 | 84.5204 | 345.455 | 148.283 | 36 | 58.2826 | 228.890 | 84.5204 | 345.455 | 328.283 | 36 | 58.2826 |
| 48.8895 | 95.4796 | 14.5454 | 148.283 | 36 | 238.283 | 228.890 | 95.4796 | 14.5454 | 328.283 | 36 | 238.283 |
| 48.8895 | 95.4796 | 194.546 | 148.283 | 72 | 121.717 | 228.890 | 95.4796 | 194.546 | 328.283 | 72 | 121.717 |
| 58.2826 | 36 | 148.283 | 148.283 | 72 | 301.717 | 238.283 | 36 | 148.283 | 328.283 | 72 | 301.717 |
| 58.2826 | 36 | 328.283 | 148.283 | 108 | 58.2826 | 238.283 | 36 | 328.283 | 328.283 | 108 | 58.2826 |
| 58.2826 | 72 | 31.7175 | 148.283 | 108 | 238.283 | 238.283 | 72 | 31.7175 | 328.283 | 108 | 238.283 |
| 58.2826 | 72 | 211.717 | 148.283 | 144 | 121.717 | 238.283 | 72 | 211.717 | 328.283 | 144 | 121.717 |
| 58.2826 | 108 | 148.283 | 148.283 | 144 | 301.717 | 238.283 | 108 | 148.283 | 328.283 | 144 | 301.717 |
| 58.2826 | 108 | 328.283 | 159.095 | 15.5225 | 159.095 | 238.283 | 108 | 328.283 | 339.095 | 15.5225 | 159.095 |
| 58.2826 | 144 | 31.7175 | 159.095 | 15.5225 | 339.095 | 238.283 | 144 | 31.7175 | 339.095 | 15.5225 | 339.095 |
| 58.2826 | 144 | 211.717 | 159.095 | 44.4775 | 20.9052 | 238.283 | 144 | 211.717 | 339.095 | 44.4775 | 20.9052 |
| 69.0948 | 60 | 159.095 | 159.095 | 44.4775 | 200.905 | 249.095 | 60 | 159.095 | 339.095 | 44.4775 | 200.905 |
| 69.0948 | 60 | 339.095 | 159.095 | 60 | 69.0948 | 249.095 | 60 | 339.095 | 339.095 | 60 | 69.0948 |
| 69.0948 | 120 | 20.9052 | 159.095 | 60 | 249.095 | 249.095 | 120 | 20.9052 | 339.095 | 60 | 249.095 |
| 69.0948 | 120 | 200.905 | 159.095 | 75.5225 | 20.9052 | 249.095 | 120 | 200.905 | 339.095 | 75.5225 | 20.9052 |
| 70.6909 | 49.1176 | 7.25597 | 159.095 | 75.5225 | 200.905 | 250.691 | 49.1176 | 7.25597 | 339.095 | 75.5225 | 200.905 |
| 70.6909 | 49.1176 | 187.256 | 159.095 | 104.478 | 159.095 | 250.691 | 49.1176 | 187.256 | 339.095 | 104.478 | 159.095 |
| 70.6909 | 130.882 | 172.744 | 159.095 | 104.478 | 339.095 | 250.691 | 130.882 | 172.744 | 339.095 | 104.478 | 339.095 |
| 70.6909 | 130.882 | 352.7441 | 159.095 | 120 | 110.905 | 250.691 | 130.882 | 352.7441 | 339.095 | 120 | 110.905 |
| 74.5496 | 69.7882 | 74.5496 | 159.095 | 120 | 290.905 | 254.550 | 69.7882 | 74.5496 | 339.095 | 120 | 290.905 |
| 74.5496 | 69.7882 | 254.550 | 159.095 | 135.522 | 159.095 | 254.550 | 69.7882 | 254.550 | 339.095 | 135.522 | 159.095 |
| 74.5496 | 110.212 | 105.450 | 159.095 | 135.522 | 339.095 | 254.550 | 110.212 | 105.450 | 339.095 | 135.522 | 339.095 |
| 74.5496 | 110.212 | 285.450 | 159.095 | 164.478 | 20.9052 | 254.550 | 110.212 | 285.450 | 339.095 | 164.478 | 20.9052 |
| 81.6992 | 41.4096 | 81.6992 | 159.095 | 164.478 | 200.905 | 261.699 | 41.4096 | 81.6992 | 339.095 | 164.478 | 200.905 |
| 81.6992 | 41.4096 | 261.699 | 165.455 | 84.5204 | 48.8895 | 261.699 | 41.4096 | 261.699 | 345.455 | 84.5204 | 48.8895 |
| 81.6992 | 138.590 | 98.3008 | 165.455 | 84.5204 | 228.890 | 261.699 | 138.590 | 98.3008 | 345.455 | 84.5204 | 228.890 |
| 81.6992 | 138.590 | 278.301 | 165.455 | 95.4796 | 131.110 | 261.699 | 138.590 | 278.301 | 345.455 | 95.4796 | 131.110 |
| 84.3401 | 75.5225 | 42.5298 | 165.455 | 95.4796 | 311.110 | 264.340 | 75.5225 | 42.5298 | 345.455 | 95.4796 | 311.110 |
| 84.3401 | 75.5225 | 222.530 | 172.744 | 49.1176 | 109.309 | 264.340 | 75.5225 | 222.530 | 352.7441 | 49.1176 | 109.309 |
| 84.3401 | 104.478 | 137.470 | 172.744 | 49.1176 | 289.309 | 264.340 | 104.478 | 137.470 | 352.7441 | 49.1176 | 289.309 |
| 84.3401 | 104.478 | 317.471 | 172.744 | 130.882 | 70.6909 | 264.340 | 104.478 | 317.471 | 352.7441 | 130.882 | 70.6909 |
| 90 | 0 | 0 | 172.744 | 130.882 | 250.691 | 270 | 0 | 0 | 352.7441 | 130.882 | 250.691 |
© 2010 by the authors; licensee MDPI, Basel, Switzerland. This article is an Open Access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/3.0/.)
Share and Cite
Mamone, S.; Pileio, G.; Levitt, M.H. Orientational Sampling Schemes Based on Four Dimensional Polytopes. Symmetry 2010, 2, 1423-1449. https://doi.org/10.3390/sym2031423
Mamone S, Pileio G, Levitt MH. Orientational Sampling Schemes Based on Four Dimensional Polytopes. Symmetry. 2010; 2(3):1423-1449. https://doi.org/10.3390/sym2031423
Chicago/Turabian StyleMamone, Salvatore, Giuseppe Pileio, and Malcolm H. Levitt. 2010. "Orientational Sampling Schemes Based on Four Dimensional Polytopes" Symmetry 2, no. 3: 1423-1449. https://doi.org/10.3390/sym2031423
APA StyleMamone, S., Pileio, G., & Levitt, M. H. (2010). Orientational Sampling Schemes Based on Four Dimensional Polytopes. Symmetry, 2(3), 1423-1449. https://doi.org/10.3390/sym2031423