
A Path-Planning Method Recommended for Multi-UAV Police Patrols Based on the Wolf Pack Optimization Algorithm Using CDRS and DRSS


Abstract
1. Introduction
2. Related Works
2.1. Principle of WDX-WPOA
2.2. Datasets
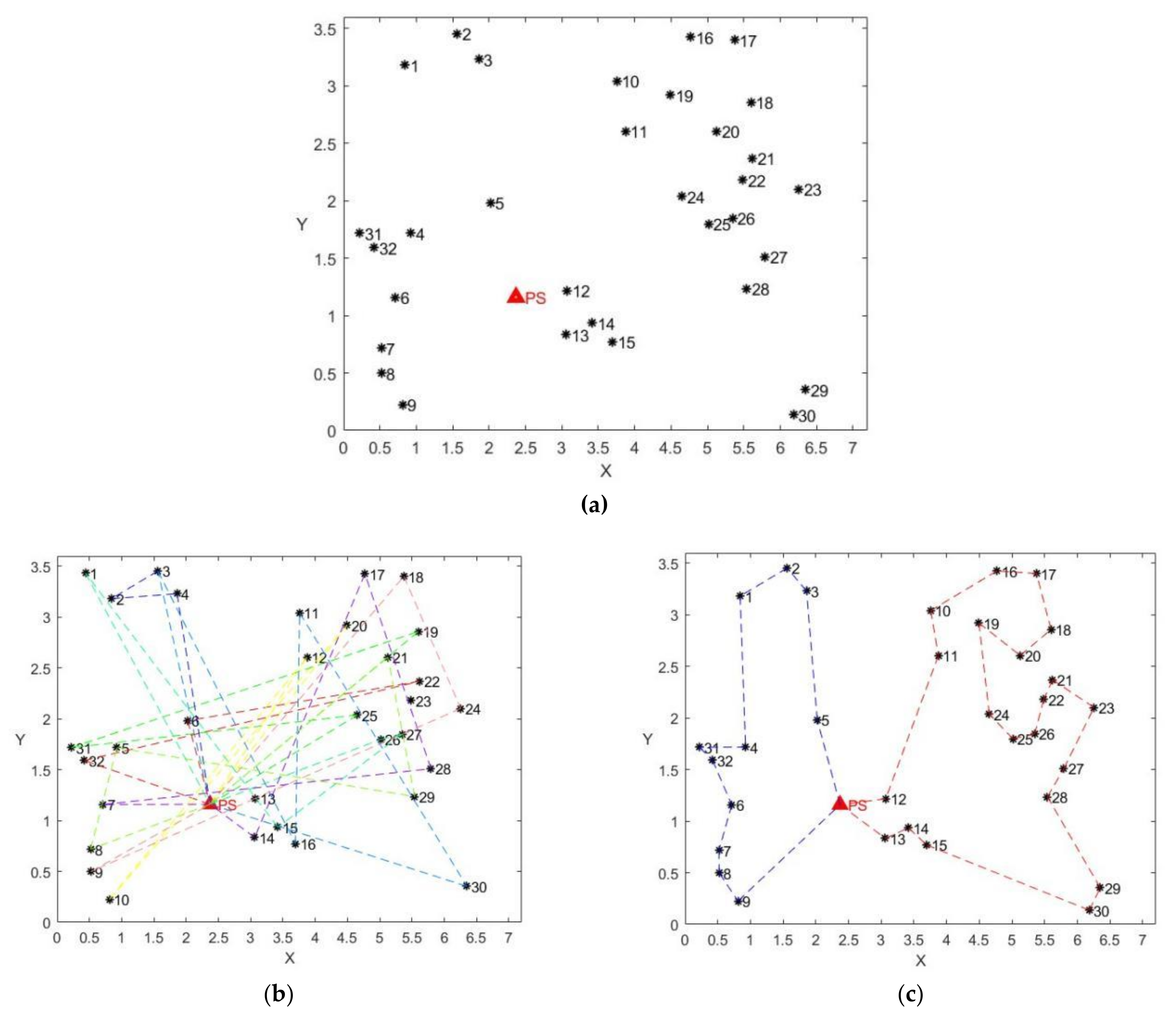
2.3. Police Multi-UAV Patrol Model Construction (PMU-3PM)
3. Improvement and Design of the New Proposed Method
3.1. Composite-Directional Raid Strategy (CDRS)
3.2. Dynamic Random Search Strategy (DRSS)
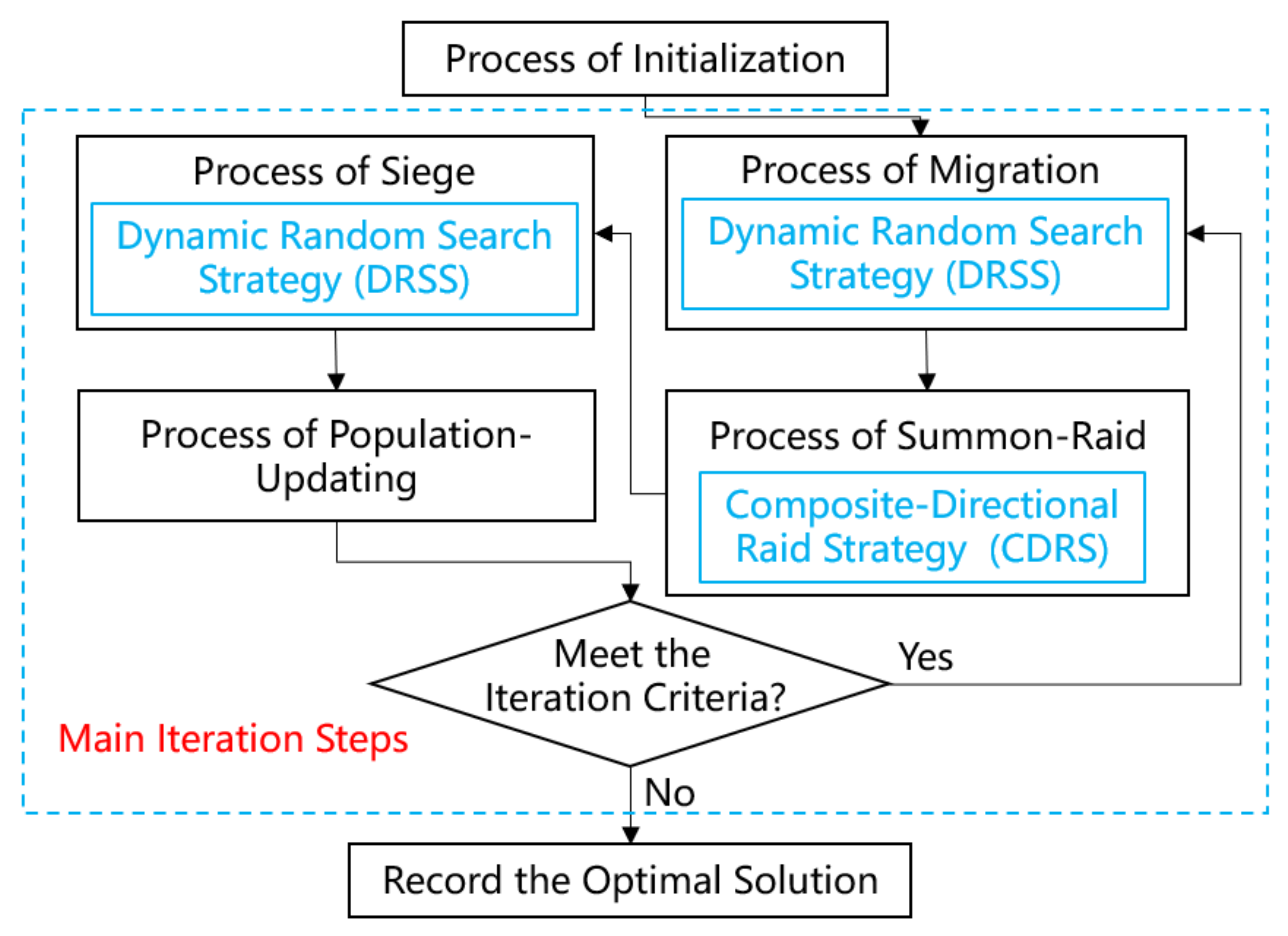
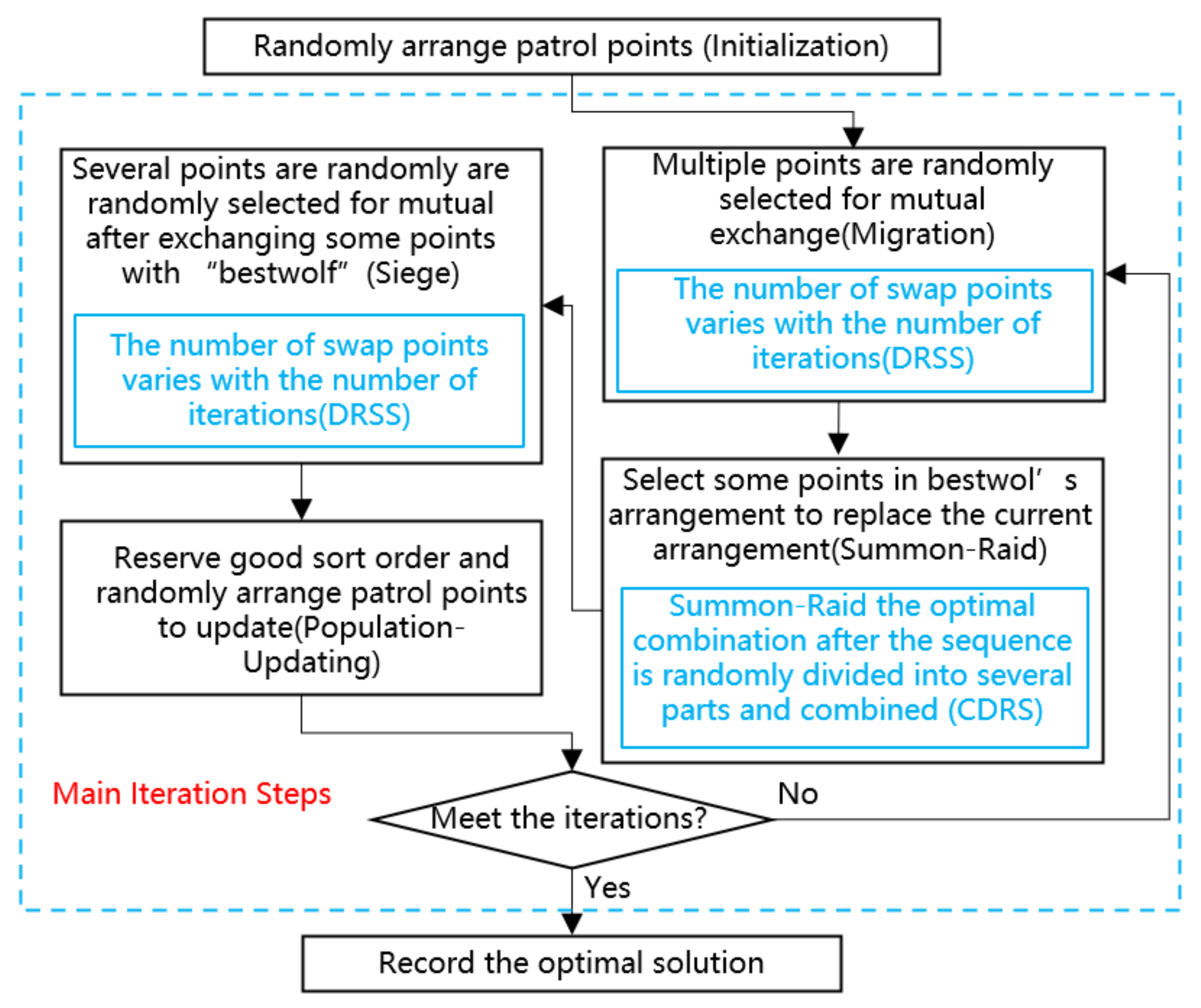
3.3. Steps of Algorithms
4. Experiments and Analysis
4.1. Experimental Environment & Comparative Algorithms
4.2. Test Function Results and Analysis
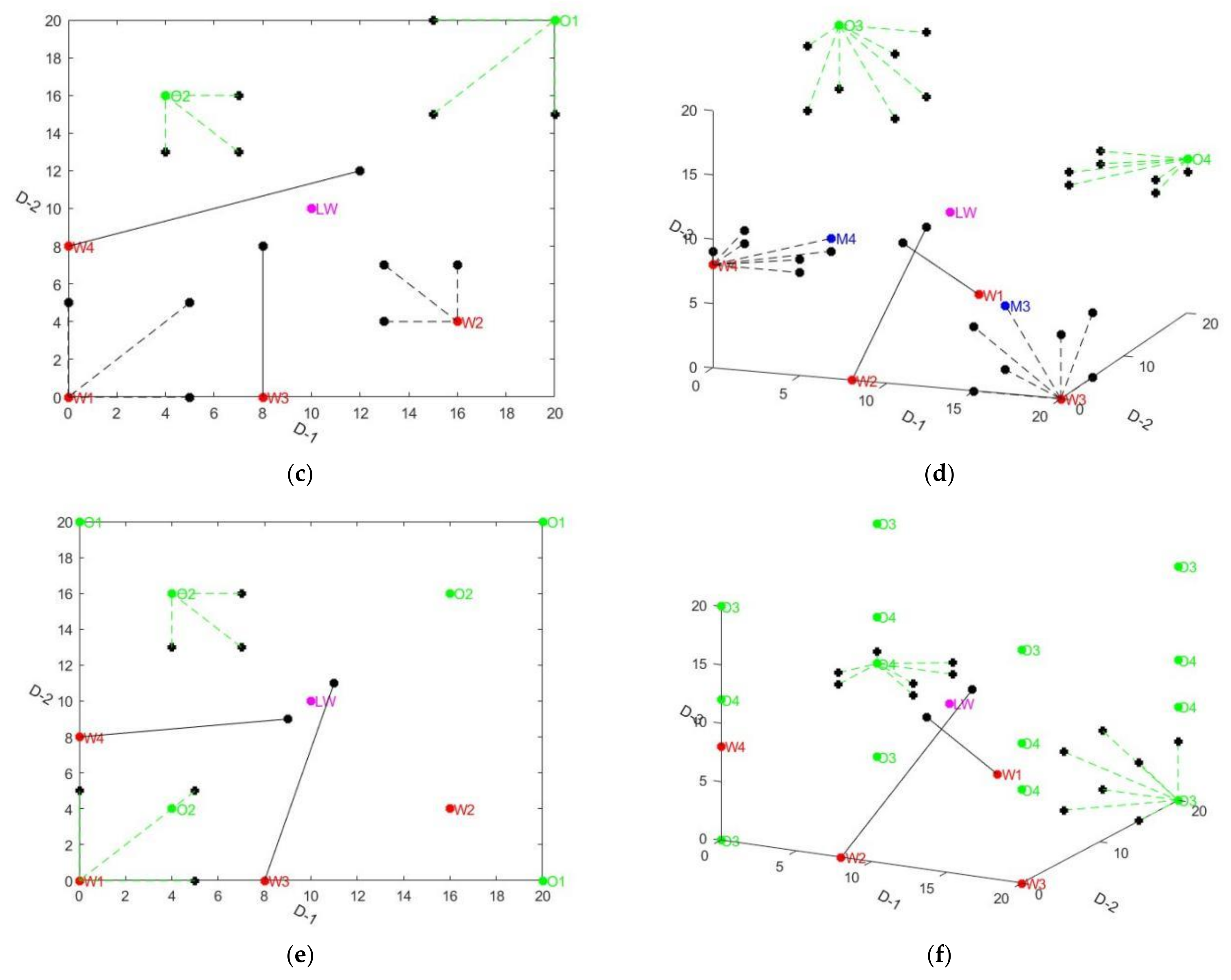
4.3. Test Results and Analysis of PMU-3PM
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Chen, H.; Gao, X.; Li, H.; Yang, Z. A framework for the optimal deployment of police drones based on street-level crime risk. Appl. Geogr. 2024, 162, 103178. [Google Scholar] [CrossRef]
- Miyano, K.; Shinkuma, R.; Shiode, N.; Shiode, S.; Sato, T.; Oki, E. multi-UAV Allocation Framework for Predictive Crime Deterrence and Data Acquisition. Internet Things 2020, 11, 100205. [Google Scholar] [CrossRef]
- Fang, Z.; Savkin, A.V. Strategies for Optimized UAV Surveillance in Various Tasks and Scenarios: A Review. Drones 2024, 8, 193. [Google Scholar] [CrossRef]
- Wang, C.; Tian, F.; Pan, Y. Swarm Intelligence Response Methods Based on Urban Crime Event Prediction. Electronics 2023, 12, 4610. [Google Scholar] [CrossRef]
- Yang, J.; Ding, Z.; Wang, L. The Programming Model of Air-Ground Cooperative Patrol Between multi-UAV and Police Car. IEEE Access 2021, 9, 134503–134517. [Google Scholar] [CrossRef]
- Wang, C.; Wang, S.; Song, S.; Wang, K.; Wu, S.; Huang, G. Multi unmanned ship path planning method and simulation 418 for maritime patrol. Chin. J. Image Graph. 2023, 28, 2536–2548. [Google Scholar]
- Liu, H.; Sun, Y.; Pan, N.; Chen, Q.; Guo, X.; Pan, D.; Sun, Y.; Pan, N.; Chen, Q.; Guo, X.; et al. Multi-UAV Cooperative Task Planning for Border Patrol based on Hierarchical Optimization. J. Imaging Sci. Technol. 2021, 65, 1. [Google Scholar] [CrossRef]
- Savkin, A.V.; Huang, H. Multi-UAV Navigation for Optimized Video Surveillance of Ground Vehicles on Uneven Terrains. IEEE Trans. Intell. Transp. Syst. 2023, 24, 10238–10242. [Google Scholar] [CrossRef]
- Xiao, W.; Wang, D.; Liu, H.; Zhang, Y.; Wang, Y. Path Planning for Unmanned Aerial Vehicle Using Enhanced Dynamic Group Based Collaborative Optimization Algorithm. In Advanced Intelligent Computing Technology and Applications; Huang, D.S., Zhang, X., Chen, W., Eds.; Springer: Singapore, 2024; Volume 14862, pp. 311–323. [Google Scholar]
- Bai, X.; Jiang, H.; Cui, J.; Lu, K.; Chen, P.; Zhang, M. UAV Path Planning Based on Improved A∗ and DWA Algorithms. Int. J. Aerosp. Eng. 2021, 2021, 4511252. [Google Scholar] [CrossRef]
- Yu, X.; Jiang, N.; Wang, X.; Li, M. A hybrid algorithm based on grey wolf optimizer and differential evolution for UAV path planning. Expert Syst. Appl. 2023, 215, 119327. [Google Scholar] [CrossRef]
- Zhu, H.; Wang, Y.; Li, X. UCAV Path Planning for Avoiding Obstacles using Cooperative Co-evolution Spider Monkey Optimization. Knowl. Based Syst. 2022, 246, 108713. [Google Scholar] [CrossRef]
- Wang, X.; Pan, J.-S.; Yang, Q.; Kong, L.; Snášel, V.; Chu, S.-C. Modified Mayfly Algorithm for UAV Path Planning. Drones 2022, 6, 134. [Google Scholar] [CrossRef]
- Chen, X.; Cheng, F.; Liu, C.; Cheng, L.; Mao, Y. An improved wolf pack optimization algorithm for optimization problems: Design and evaluation. PLoS ONE 2021, 16, e0254239. [Google Scholar] [CrossRef] [PubMed]
- Duan, H.; Yang, Q.; Deng, Y.; Li, P.; Qiu, H.; Zhang, T.; Zhang, D.; Huo, M.; Shen, Y. Unmanned aerial systems coordinate target allocation based on wolf behaviors. Sci. China Inf. Sci. 2019, 62, 14201. [Google Scholar] [CrossRef]
- Lai, R.; Gao, B.; Lin, W. Solving No-Wait Flow Shop Scheduling Problem Based on Discrete wolf pack optimization algorithm. Sci. Program. 2021, 2021, 4731012. [Google Scholar]
- Liu, H.; Sun, R.; Liu, Q. The tactics of ship collision avoidance based on Quantum-behaved wolf pack optimization algorithm. Concurr. Comput. Pract. Exp. 2020, 32, e5196. [Google Scholar] [CrossRef]
- Sun, Y.; Chen, W.; Wu, Y. A New Wolves Intelligent Optimization Algorithm. In Proceedings of the 2021 IEEE/ACIS 19th International Conference on Computer and Information Science (ICIS), Shanghai, China, 23–25 June 2021; pp. 143–147. [Google Scholar]
- Zhao, Q.; Tao, R.; Li, J.; Mu, Y. An Improved wolf pack optimization algorithm. In Proceedings of the 2020 Chinese Control and Decision Conference (CCDC), Hefei, China, 22–24 August 2020; pp. 626–633. [Google Scholar]
- Zhu, Q.; Wu, H.; Li, N.; Hu, J. A Chaotic Disturbance wolf pack optimization algorithm for Solving Ultrahigh-Dimensional Complex Functions. Complex 2021, 2021, 6676934. [Google Scholar] [CrossRef]
- Yang, C.; Tu, X.; Chen, J. Algorithm of Marriage in Honey Bees Optimization Based on the Wolf Pack Search. In Proceedings of the 2007 International Conference on Intelligent Pervasive Computing (IPC 2007), Jeju, Republic of Korea, 11–13 October 2007; pp. 462–467. [Google Scholar]
- Wang, D.; Qian, X.; Liu, K.; Ban, X.; Guan, X. An adaptive distributed size wolf-pack optimization algorithm using strategy of jumping for raid. IEEE Access 2018, 6, 65260–65270. [Google Scholar] [CrossRef]
- Wang, D.; Zhang, G.; Wu, F.; Huang, Z.; Chen, Y. Public Security Patrol Path Planning Recommendation Method based on Wolf-Pack Optimization Algorithm Using DAF and BRS. In Machine Learning and Intelligent Systems; IOS Press: Amsterdam, The Netherlands, 2024. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Order | Function | Expression | Dimension | Range | Optimum |
|---|---|---|---|---|---|
| 1 | Ackley | 2 | [−32.768, 32.768] | Min f = 0 | |
| 2 | Three-Hump-Camel | 2 | [−5, 5] | Min f = 0 | |
| 3 | Drop-Wave | 2 | [−5.12, 5.12] | Min f = −1 | |
| 4 | Leon | 2 | [−10, 10] | Min f = 0 | |
| 5 | Griewank | 2 | [−600, 600] | Min f = 0 | |
| 6 | Levy | 2 | [−10, 10] | Min f = 0 | |
| 7 | Levy13 | 2 | [−10, 10] | Min f = 0 | |
| 8 | Rastrigin | 2 | [−5.12, 5.12] | Min f = 0 | |
| 9 | Schaffer2 | 2 | [−100, 100] | Min f = 0 | |
| 10 | Bohachevsky1 | 2 | [−100, 100] | Min f = 0 | |
| 11 | Trecanni | 2 | [−5, 5] | Min f = 0 | |
| 12 | Rotated-Hyper-Ellipsoid | 2 | [−65.536, 65.536] | Min f = 0 | |
| 13 | Sum-Squares | 2 | [−10, 10] | Min f = 0 | |
| 14 | Trid | 2 | [−4, 4] | Min f = 2 | |
| 15 | Beale | 2 | [−4.5, 4.5] | Min f = 0 | |
| 16 | Matyas | 2 | [−10, 10] | Min f = 0 | |
| 17 | Zakharov | 2 | [−5, 10] | Min f = 0 | |
| 18 | Easom | 2 | [−100, 100] | Min f = −1 | |
| 19 | Eggcrate | 2 | [−10, 10] | Min f = 0 | |
| 20 | Bohachevsky3 | 2 | [−100, 100] | Min f = 0 |
| Order | Algorithm Name | Configuration |
|---|---|---|
| 1 | GA | The crossover probability is 0.8, the mutation probability is 0.01, the max iteration T = 600, population size N = 50. |
| 2 | PSO | Inertia weight is 0.5, the cognitive coefficient is 1.5, the social coefficient is 1.5, the max iteration T = 600, population size N = 50. |
| 3 | WDX-WPOA | Initial value of search step size step_a0 = 1.5; the initial max value of sicge step size step_cmax = 1 × 106 and the minimum value of siege step size step_cmin = 1 × 10−40; the maximum iteration time T = 600; the wolf population N = 50. |
| 4 | DAF-BRS-CWOA | Initial value of search step size step_a0 = 1.5; the initial max value of sicge step size step_cmax = 1 × 106 and the minimum value of siege step size step_cmin = 1 × 10−40; the maximum iteration time T = 600; the wolf population N = 50. |
| 5 | CDR-DRS-WPOA | Initial value of search step size step_a0 = 1.5; the initial max value of siege step size step_cmax = 1 × 106 and the minimum value of siege step size step_cmin = 1 × 10−40; the maximum iteration time T = 600; the wolf population N = 50. |
| Function | Algorithm | Optimal Value | Worst Value | Average Value | Standard Deviation | Average Iteration | Average Time Spent |
|---|---|---|---|---|---|---|---|
| 1. Ackley min f = 0 | GA | 7.92 × 10−6 | 1.28 × 10−4 | 5.17 × 10−5 | 6.95 × 10−10 | 600 | 0.23365 |
| PSO | 1.71 × 10−5 | 5.72 × 10−4 | 1.14 × 10−4 | 6.89 × 10−9 | 600 | 0.046053 | |
| WDX-WPOA | 0 | 0 | 0 | 0 | 25.48 | 0.031144 | |
| DAF-BRS-CWOA | 0 | 0 | 0 | 0 | 22.12 | 0.028735 | |
| CDR-DRS-WPOA | 0 | 0 | 0 | 0 | 16.42 | 0.019348 | |
| 2. Three-Hump-Camel min f = 0 | GA | 2.04 × 10−14 | 0.29864 | 0.035837 | 9.70 × 10−2 | 600 | 0.15705 |
| PSO | 1.60 × 10−206 | 0.29864 | 0.011946 | 5.85 × 10−2 | 600 | 0.081915 | |
| WDX-WPOA | 0 | 0 | 0 | 0 | 24.32 | 0.063319 | |
| DAF-BRS-CWOA | 0 | 0 | 0 | 0 | 21.1 | 0.058633 | |
| CDR-DRS-WPOA | 0 | 0 | 0 | 0 | 16.44 | 0.027872 | |
| 3. Drop-Wave min f = −1 | GA | −0.99992 | −0.78573 | −0.93986 | 0.04808 | 600 | 0.034075 |
| PSO | −1 | −0.93625 | −0.98512 | 0.026965 | 218.6333 | 0.020236 | |
| WDX-WPOA | −1 | −1 | −1 | 0 | 15.16 | 0.014995 | |
| DAF-BRS-CWOA | −1 | −1 | −1 | 0 | 13.14 | 0.013978 | |
| CDR-DRS-WPOA | −1 | −1 | −1 | 0 | 7.52 | 0.0075679 | |
| 4. Leon min f = 0 | GA | 2.18 × 10−2 | 8.7913 | 2.1025 | 2.7501 | 600 | 0.024246 |
| PSO | 0 | 1.26 × 10−19 | 4.20 × 10−21 | 2.26 × 10−20 | 595.3 | 0.10341 | |
| WDX-WPOA | 0 | 0 | 0 | 0 | 28.54 | 0.046596 | |
| DAF-BRS-CWOA | 0 | 0 | 0 | 0 | 24.12 | 0.044818 | |
| CDR-DRS-WPOA | 0 | 0 | 0 | 0 | 20.58 | 0.02608 | |
| 5. Griewank min f = 0 | GA | 0.004788 | 0.31789 | 0.075813 | 0.063402 | 600 | 0.013661 |
| PSO | 0 | 0.019719 | 0.0026303 | 0.0045421 | 339.3 | 0.0085504 | |
| WDX-WPOA | 0 | 0 | 0 | 0 | 16.8 | 0.018748 | |
| DAF-BRS-CWOA | 0 | 0 | 0 | 0 | 13.64 | 0.016633 | |
| CDR-DRS-WPOA | 0 | 0 | 0 | 0 | 8.36 | 0.0090338 | |
| 6. Levy min f = 0 | GA | 0.00024335 | 1.1263 | 0.12324 | 0.21281 | 600 | 0.038618 |
| PSO | 1.50 × 10−32 | 1.50 × 10−32 | 1.50 × 10−32 | 1.09 × 10−47 | 600 | 0.039204 | |
| WDX-WPOA | 0 | 8.59 × 10−8 | 1.72 × 10−9 | 1.20 × 10−8 | 551.54 | 0.67339 | |
| DAF-BRS-CWOA | 0 | 0.71613 | 0.024478 | 0.11739 | 509.82 | 0.61078 | |
| CDR-DRS-WPOA | 0 | 5.02 × 10−9 | 1.16 × 10−10 | 7.09 × 10−10 | 91.16 | 0.12264 | |
| 7. Levy13 min f = 0 | GA | 0.011247 | 2.2797 | 0.22303 | 0.76184 | 600 | 0.01238 |
| PSO | 0.00010961 | −0.97283 | −0.97283 | 3.33 × 10−16 | 600 | 0.012789 | |
| WDX-WPOA | 0 | 0 | 0 | 0 | 25.14 | 0.032147 | |
| DAF-BRS-CWOA | 0 | 0 | 0 | 0 | 21.66 | 0.02904 | |
| CDR-DRS-WPOA | 0 | 0 | 0 | 0 | 15.98 | 0.01774 | |
| 8. Rastrigin min f = 0 | GA | 0.013678 | 6.3489 | 2.2711 | 1.7587 | 600 | 0.0119 |
| PSO | 0 | 0.99496 | 0.066331 | 0.24819 | 110.4333 | 0.0023772 | |
| WDX-WPOA | 0 | 0 | 0 | 0 | 12.58 | 0.013655 | |
| DAF-BRS-CWOA | 0 | 0 | 0 | 0 | 10.74 | 0.012917 | |
| CDR-DRS-WPOA | 0 | 0 | 0 | 0 | 7.4 | 0.0077144 | |
| 9. Schaffer2 min f = 0 | GA | 1.03 × 10−6 | 0.042464 | 0.010477 | 0.0093243 | 600 | 0.01321 |
| PSO | 0 | 0 | 0 | 0 | 66.9667 | 0.012164 | |
| WDX-WPOA | 0 | 0 | 0 | 0 | 11.32 | 0.01139 | |
| DAF-BRS-CWOA | 0 | 0 | 0 | 0 | 9.78 | 0.010517 | |
| CDR-DRS-WPOA | 0 | 0 | 0 | 0 | 6.42 | 0.0061977 | |
| 10. Bohachevsky3 min f = 0 | GA | 0.011268 | 0.91934 | 0.48134 | 0.25563 | 600 | 0.011984 |
| PSO | 0 | 0 | 0 | 0 | 78.1667 | 0.015723 | |
| WDX-WPOA | 0 | 0 | 0 | 0 | 14.34 | 0.014551 | |
| DAF-BRS-CWOA | 0 | 0 | 0 | 0 | 11.94 | 0.013178 | |
| CDR-DRS-WPOA | 0 | 0 | 0 | 0 | 10.32 | 0.0099612 | |
| 11. Trecanni min f = 0 | GA | 7.43 × 10−7 | 0.0038742 | 0.00037922 | 7.20 × 10−4 | 600 | 0.027606 |
| PSO | 2.34 × 10−168 | 3.55 × 10−15 | 1.42 × 10−15 | 1.74 × 10−15 | 600 | 0.107907 | |
| WDX-WPOA | 0 | 0 | 0 | 0 | 24.48 | 0.062238 | |
| DAF-BRS-CWOA | 0 | 0 | 0 | 0 | 20.96 | 0.056577 | |
| CDR-DRS-WPOA | 0 | 0 | 0 | 0 | 16 | 0.026963 | |
| 12. Rotated-Hyper-Ellipsoid min f = 0 | GA | 0.00039244 | 0.12985 | 0.034819 | 0.03493 | 600 | 0.012687 |
| PSO | 1.96 × 10−134 | 1.02 × 10−129 | 8.56 × 10−131 | 2.28 × 10−130 | 600 | 0.013828 | |
| WDX-WPOA | 0 | 0 | 0 | 0 | 26.04 | 0.02325 | |
| DAF-BRS-CWOA | 0 | 0 | 0 | 0 | 22.66 | 0.021667 | |
| CDR-DRS-WPOA | 0 | 0 | 0 | 0 | 17.22 | 0.015096 | |
| 13. Sum-Squares min f = 0 | GA | 2.42 × 10−6 | 0.0025094 | 0.00051005 | 0.00048937 | 600 | 0.012084 |
| PSO | 5.91 × 10−137 | 2.18 × 10−132 | 3.76 × 10−133 | 5.82 × 10−133 | 600 | 0.013233 | |
| WDX-WPOA | 0 | 0 | 0 | 0 | 24.4 | 0.021132 | |
| DAF-BRS-CWOA | 0 | 0 | 0 | 0 | 20.98 | 0.021415 | |
| CDR-DRS-WPOA | 0 | 0 | 0 | 0 | 16.16 | 0.014255 | |
| 14. Trid min f = −2 | GA | −0.037736 | −1.9991 | −1.8925 | 0.11219 | 600 | 0.01241 |
| PSO | −2 | −2 | −2 | 0 | 523 | 0.014356 | |
| WDX-WPOA | −2 | −2 | −2 | 0 | 10.92 | 0.010908 | |
| DAF-BRS-CWOA | −2 | −2 | −2 | 0 | 9.22 | 0.0094853 | |
| CDR-DRS-WPOA | −2 | −2 | −2 | 0 | 6.52 | 0.0065244 | |
| 15. Beale min f = 0 | GA | 1.62 × 10−5 | 0.068489 | 0.021623 | 0.019766 | 600 | 0.022946 |
| PSO | 0 | 0.76207 | 0.050805 | 0.19009 | 190.4333 | 0.030796 | |
| WDX-WPOA | 0 | 0 | 0 | 0 | 23.86 | 0.041922 | |
| DAF-BRS-CWOA | 0 | 0 | 0 | 0 | 20.12 | 0.037743 | |
| CDR-DRS-WPOA | 0 | 0 | 0 | 0 | 20.08 | 0.02635 | |
| 16. Matyas min f = 0 | GA | 9.11 × 10−6 | 0.042161 | 0.010059 | 0.010711 | 600 | 0.01241 |
| PSO | 1.76 × 10−120 | 2.71 × 10−116 | 2.87 × 10−117 | 5.48 × 10−117 | 600 | 0.013081 | |
| WDX-WPOA | 0 | 0 | 0 | 0 | 24.42 | 0.022231 | |
| DAF-BRS-CWOA | 0 | 0 | 0 | 0 | 20.72 | 0.020007 | |
| CDR-DRS-WPOA | 0 | 0 | 0 | 0 | 16.16 | 0.014232 | |
| 17. Zakharov min f = 0 | GA | 2.32 × 10−6 | 0.0016735 | 0.00069625 | 0.00057972 | 600 | 0.015955 |
| PSO | 3.10 × 10−137 | 7.27 × 10−131 | 3.57 × 10−132 | 1.30 × 10−131 | 600 | 0.016975 | |
| WDX-WPOA | 0 | 0 | 0 | 0 | 24.6 | 0.046247 | |
| DAF-BRS-CWOA | 0 | 0 | 0 | 0 | 21.26 | 0.040252 | |
| CDR-DRS-WPOA | 0 | 0 | 0 | 0 | 16.02 | 0.02342 | |
| 18. Easom min f = −1 | GA | −1 | 0 | −0.75001 | 0.18749 | 72.91 | 0.084762 |
| PSO | −1 | −6.30 × 10−61 | −0.90001 | 0.089988 | 593.02 | 0.033852 | |
| WDX-WPOA | −1 | −1 | −1 | 0 | 13.62 | 0.014799 | |
| DAF-BRS-CWOA | −1 | −1 | −1 | 0 | 11.88 | 0.013726 | |
| CDR-DRS-WPOA | −1 | −1 | −1 | 0 | 7.98 | 0.0080525 | |
| 19. Eggcrate min f = 0 | GA | 1.13 × 10−11 | 3.20 × 10−8 | 4.13 × 10−9 | 4.66 × 10−17 | 600 | 0.085997 |
| PSO | 6.23 × 10−24 | 1.42 × 10−8 | 1.42 × 10−10 | 1.99 × 10−18 | 597.56 | 0.030566 | |
| WDX-WPOA | 0 | 0 | 0 | 0 | 24.78 | 0.023696 | |
| DAF-BRS-CWOA | 0 | 0 | 0 | 0 | 21.68 | 0.021977 | |
| CDR-DRS-WPOA | 0 | 0 | 0 | 0 | 16.28 | 0.015303 | |
| 20. Bohachevsky1 min f = 0 | GA | 0.0053751 | 2.2884 | 0.57643 | 0.42923 | 600 | 0.022766 |
| PSO | 0 | 0 | 0 | 0 | 86.92 | 0.014321 | |
| WDX-WPOA | 0 | 0 | 0 | 0 | 14.38 | 0.016296 | |
| DAF-BRS-CWOA | 0 | 0 | 0 | 0 | 12.28 | 0.014996 | |
| CDR-DRS-WPOA | 0 | 0 | 0 | 0 | 8.6 | 0.0089217 |
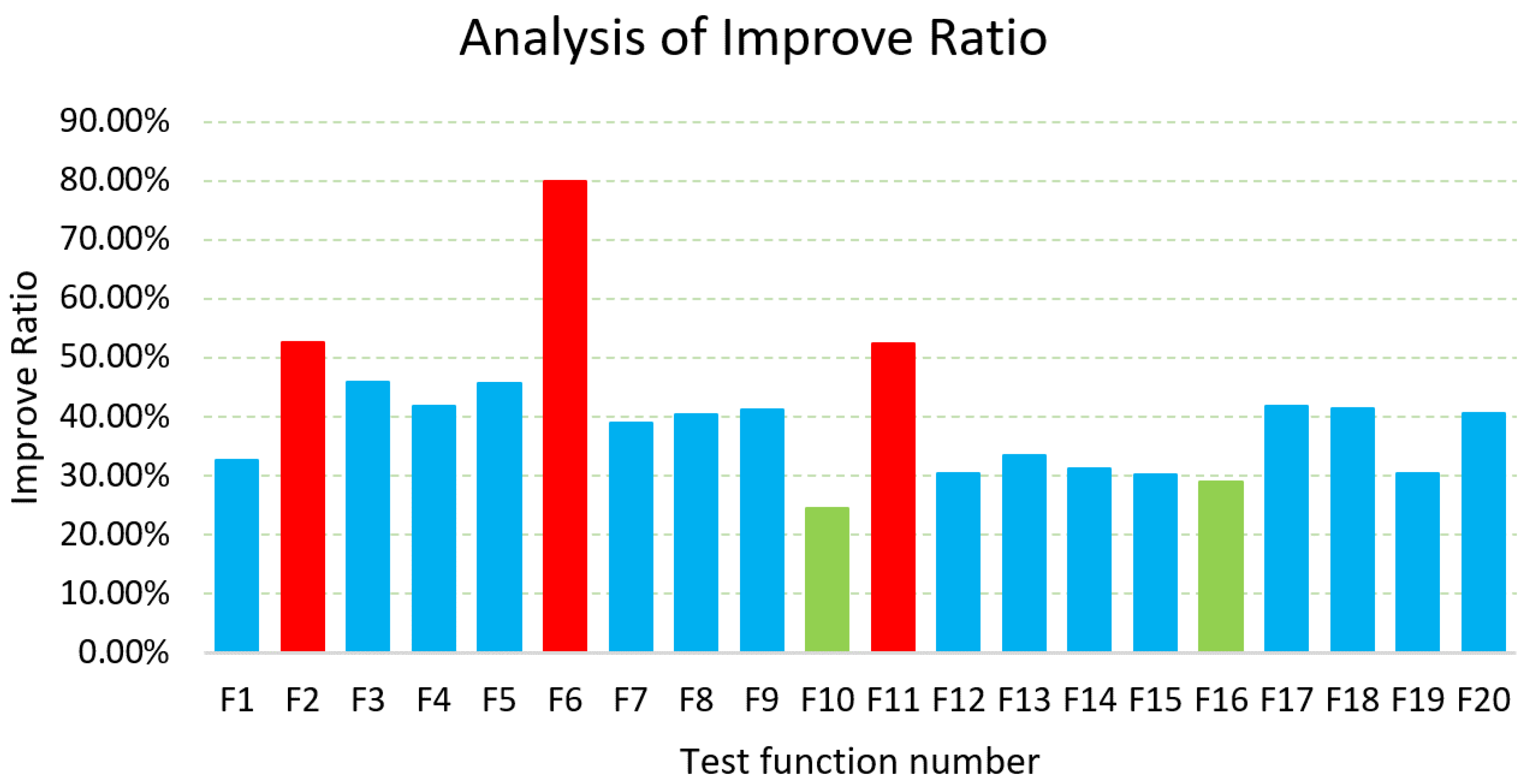
| Algorithm | WDX-WPOA | DAF-BRS-CWOA | CDR-DRS-WPOA | Improvement Rate | |
|---|---|---|---|---|---|
| Function | |||||
| F1: Ackley | 0.031144 | 0.028735 | 0.019348 | 32.67% | |
| F2: Three-Hump-Camel | 0.063319 | 0.058633 | 0.027872 | 52.46% | |
| F3: Drop-Wave | 0.014995 | 0.013978 | 0.0075679 | 45.86% | |
| F4: Leon | 0.046596 | 0.044818 | 0.02608 | 41.81% | |
| F5: Griewank | 0.018748 | 0.016633 | 0.0090338 | 45.69% | |
| F6: Levy | 0.67339 | 0.61078 | 0.12264 | 79.92% | |
| F7: Levy13 | 0.032147 | 0.02904 | 0.01774 | 38.91% | |
| F8: Rastrigin | 0.013655 | 0.012917 | 0.0077144 | 40.28% | |
| F9: Schaffer2 | 0.01139 | 0.010517 | 0.0061977 | 41.07% | |
| F10: Bohachevsky1 | 0.014551 | 0.013178 | 0.0099612 | 24.41% | |
| F11: Trecanni | 0.062238 | 0.056577 | 0.026963 | 52.34% | |
| F12: Rotated-Hyper-Ellipsoid | 0.02325 | 0.021667 | 0.015096 | 30.33% | |
| F13: Sum-Squares | 0.021132 | 0.021415 | 0.014255 | 33.43% | |
| F14: Trid | 0.010908 | 0.0094853 | 0.0065244 | 31.22% | |
| F15: Beale | 0.041922 | 0.037743 | 0.02635 | 30.19% | |
| F16: Matyas | 0.022231 | 0.020007 | 0.014232 | 28.86% | |
| F17: Zakharov | 0.046247 | 0.040252 | 0.02342 | 41.82% | |
| F18: Easom | 0.014799 | 0.013726 | 0.0080525 | 41.33% | |
| F19: Eggcrate | 0.023696 | 0.021977 | 0.015303 | 30.37% | |
| F20: Bohachevsky3 | 0.016296 | 0.014996 | 0.0089217 | 40.51% | |
| Algorithm | Optimal Value | Worst Value | Average Value | Standard Deviation | Average Time |
|---|---|---|---|---|---|
| PMU-3PM-GA | 47.031 | 77.8299 | 64.2782 | 6.4325 | 0.14386 |
| PMU-3PM-PSO | 34.909 | 53.9059 | 45.7949 | 4.1645 | 0.69808 |
| PMU-3PM-WDX-WPOA | 27.955 | 45.3993 | 32.9021 | 3.6069 | 11.2806 |
| PMU-3PM-DAF-BRS-CWOA | 27.242 | 44.722 | 34.6783 | 3.3169 | 10.4916 |
| PMU-3PM-IWPA | 25.082 | 42.0629 | 31.196 | 3.8514 | 8.8258 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, D.; Zhang, M.; Huang, Z. A Path-Planning Method Recommended for Multi-UAV Police Patrols Based on the Wolf Pack Optimization Algorithm Using CDRS and DRSS. Symmetry 2025, 17, 208. https://doi.org/10.3390/sym17020208
Wang D, Zhang M, Huang Z. A Path-Planning Method Recommended for Multi-UAV Police Patrols Based on the Wolf Pack Optimization Algorithm Using CDRS and DRSS. Symmetry. 2025; 17(2):208. https://doi.org/10.3390/sym17020208
Chicago/Turabian StyleWang, Dongxing, Meijing Zhang, and Zhiyang Huang. 2025. "A Path-Planning Method Recommended for Multi-UAV Police Patrols Based on the Wolf Pack Optimization Algorithm Using CDRS and DRSS" Symmetry 17, no. 2: 208. https://doi.org/10.3390/sym17020208
APA StyleWang, D., Zhang, M., & Huang, Z. (2025). A Path-Planning Method Recommended for Multi-UAV Police Patrols Based on the Wolf Pack Optimization Algorithm Using CDRS and DRSS. Symmetry, 17(2), 208. https://doi.org/10.3390/sym17020208